Ниткоподавальний пристрій, датчик натягу нитки для реєстрації натягу переміщуваної нитки і спосіб вивіряння датчика натягу нитки
Номер патенту: 49911
Опубліковано: 15.10.2002
Автори: Вебер Фріедріх, Шмодде Германн, Лайнс Ебергард
Формула / Реферат
1. Ниткоподавальний пристрій, зокрема для еластичних ниток, зокрема для в'язальних машин зі значними коливаннями споживання нитки, таких як плосков'язальні машини, який містить ниткоподавальний барабанчик, що приводиться в дію електродвигуном, регулюючий пристрій для включення електродвигуна, такий, що постачає необхідну кількість нитки і утримує натяг нитки у межах заданих границь, датчик натягу нитки, що забезпечує стабільну реєстрацію натягу нитки протягом тривалих проміжків часу, і вивіряльний пристрій, який приводиться у дію вивіряльним імпульсом, для датчика натягу нитки і який здатний переміщати ниткопіднімальний пристрій і датчик натягу нитки один відносно одного у положенні вивіряння для вивіряння датчика натягу нитки.
2. Ниткоподавальний пристрій по пункту 1, який відрізняється тим, що ниткоподавальний барабанчик має вісь обертання, яка розташована перпендикулярно до площини, з якою нитка, що сходить, утворює гострий кут.
3. Ниткоподавальний пристрій по пункту 1, який відрізняється тим, що вивіряльний пристрій виконаний керованим по швидкості.
4. Ниткоподавальний пристрій по пункту 1, який відрізняється тим, що вивіряльний пристрій не діє щонайменше тоді , коли швидкість нитки перевищує граничне значення.
5. Ниткоподавальний пристрій по пункту 1, який відрізняється тим, що вивіряльний пристрій здатний діяти після зміни напрямку подачі нитки плосков'язальної машини або під час зміни нитки в панчішних і круглоноскових в'язальних машинах або при інших зупинках споживання нитки машиною.
6. Датчик натягу нитки для реєстрації натягу переміщуваної нитки, зокрема для барабанчикових подавальних механізмів для подавання еластичних ниток, переважно для в'язальних машин, який містить ниткоконтролюючий елемент, який розташований на шляху переміщення нитки і має опорну поверхню для нитки, вимірювальний пристрій, з'єднаний з ниткоконтролюючим елементом, для реєстрації сили, з якою нитка діє на ниткоконтролюючий елемент, ниткопіднімальний пристрій, який може щонайменше вводитись в контакт з ниткою або постійно контактувати з ниткою, виконавчий пристрій, за допомогою якого ниткоконтролюючий елемент і нитка можуть рухатись один відносно одного між положенням вивіряння і положенням вимірювання таким чином, що в положенні вивіряння нитка не опирається на ниткоконтролюючий елемент, а в положенні вимірювання нитка опирається на ниткоконтролюючий елемент .
7. Датчик натягу нитки по пункту 6, який відрізняється тим, що встановлений виконавчим пристроєм напрямок руху є поперечним до нитки.
8. Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткопіднімальний пристрій і ниткоконтролюючий елемент розташовані на одній і тій же визначеній стороні нитки, при цьому ниткопіднімальний пристрій у положенні вивіряння піднімає нитку над ниткоконтролюючим елементом, і у положенні вимірювання переважно не опирається на нитку, а нитка опирається на ниткоконтролюючий елемент.
9. Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткопіднімальнний пристрій і ниткоконтролюючий елемент установлені на визначених розміщених напроти нитки сторонах, при цьому ниткопіднімальний пристрій у положенні вивіряння дозволяє підняти нитку над ниткоконтролюючим елементом, а у положенні вимірювання дозволяє утримувати нитку у котнакті з ниткоконтролюючим елементом.
10. Датчик натягу нитки по пункту 6, який відрізняється тим, що виконавчий пристрій з'єднаний з ниткопіднімальним пристроєм для переміщення ниткопіднімального пристрою з положення вивіряння у положення вимірювання і навпаки, а ниткоконтролюючий елемент розміщений по суті, тобто якщо не враховувати його вимірювального переміщення, стаціонарно.
11. Датчик натягу нитки по пункту 6, який відрізняється тим, що виконавчий пристрій з'єднаний з вимірювальним пристроєм для переміщення вимірювального пристрою сумісно з ниткоконтролюючим елементом із положення вивіряння у положення вимірювання і навпаки, а ниткопіднімальний пристрій розташований стаціонарно.
12. Датчик натягу нитки по пункту 10 або 11, який відрізняється тим, що виконавчий пристрій є електричним лінійним привідним механізмом.
13. Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткопіднімальний пристрій утворений щонайменше одним і переважно двома ниткоприймачами, які розміщені поруч з ниткоконтролюючим елементом.
14. Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткоконтролюючий елемент установлений рухомо і переважно пружисто по суті поперечно до шляху переміщення нитки, а вимірювальний пристрій містить пристрій вимірювання подачі.
15. Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткоконтролюючий елемент обпертий за допомогою пружинного паралелограма на основу так, що утримує пристрій вимірювання подачі, і підпертий пружинно і/або демпферно.
16. Датчик натягу нитки по пункту 14, який відрізняється тим, що пристрій вимірювання подачі має два датчики подачі, які з'єднані з вимірювальним контуром, який переважно включає блок віднімання, з входами якого (+, -) з'єднані датчики подачі вимірювального пристрою.
17. Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткоконтролюючим елементом є штифт, переважно керамічний, розміщений поперечно до напрямку руху нитки, а нитка вільно установлена відносно до поздовжнього напрямку штифта.
18. Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткопіднімальний пристрій є складовою частиною вивіряльного пристрою, який призначений для визначення опорного значення для вимірювального пристрою.
19. Датчик натягу нитки по пункту 18, який відрізняється тим, що вивіряльний пристрій здатний приводитися в дію вихідним сигналом машини, який визначає стан, у якому нитка має швидкість меншу від заданого граничного значення.
20. Датчик натягу нитки по пункту 19, який відрізняється тим, що граничне значення швидкості нитки дорівнює нулю.
21. Датчик натягу нитки по пункту 6, який відрізняється тим, що з вимірювальним контуром з'єднаний регулюючий пристрій для утримання натягу нитки незмінним, при цьому регулюючий пристрій не змінює свій вихідний сигнал, коли відповідний сигнал надійшов на інактиваційний вхід.
22. Спосіб вивіряння датчика натягу нитки, зокрема для вивірення нуля датчика натягу нитки, який містить наступні операції: реєстрацію сигналу, що визначає стан, при якому натяг нитки може короткочасно відхилятися від його номінального значення, відокремлення нитки від датчика натягу нитки, реєстрація сигналу, переданого датчиком натягу нитки при піднятому стані нитки, розміщення нитки на датчику натягу нитки знову.
23. Спосіб по пункту 22, який відрізняється тим, що сигнал визначає швидкість нитки, яка менша за наперед визначене граничне значення.
24. Спосіб по пункту 22, який відрізняється тим, що як нульове значення приймають виміряне значення, яке зареєстроване з піднятою ниткою.
25. Спосіб по пункту 22, який відрізняється тим, що операцію вивіряння в плосков'язальній машині виконують при реверсі напрямку і/або під час пуску.
26. Спосіб по пункту 22, який відрізняється тим, що операцію вивіряння виконують з ниткою в русі в межах проміжку часу, у якому швидкість нитки стала.
Текст
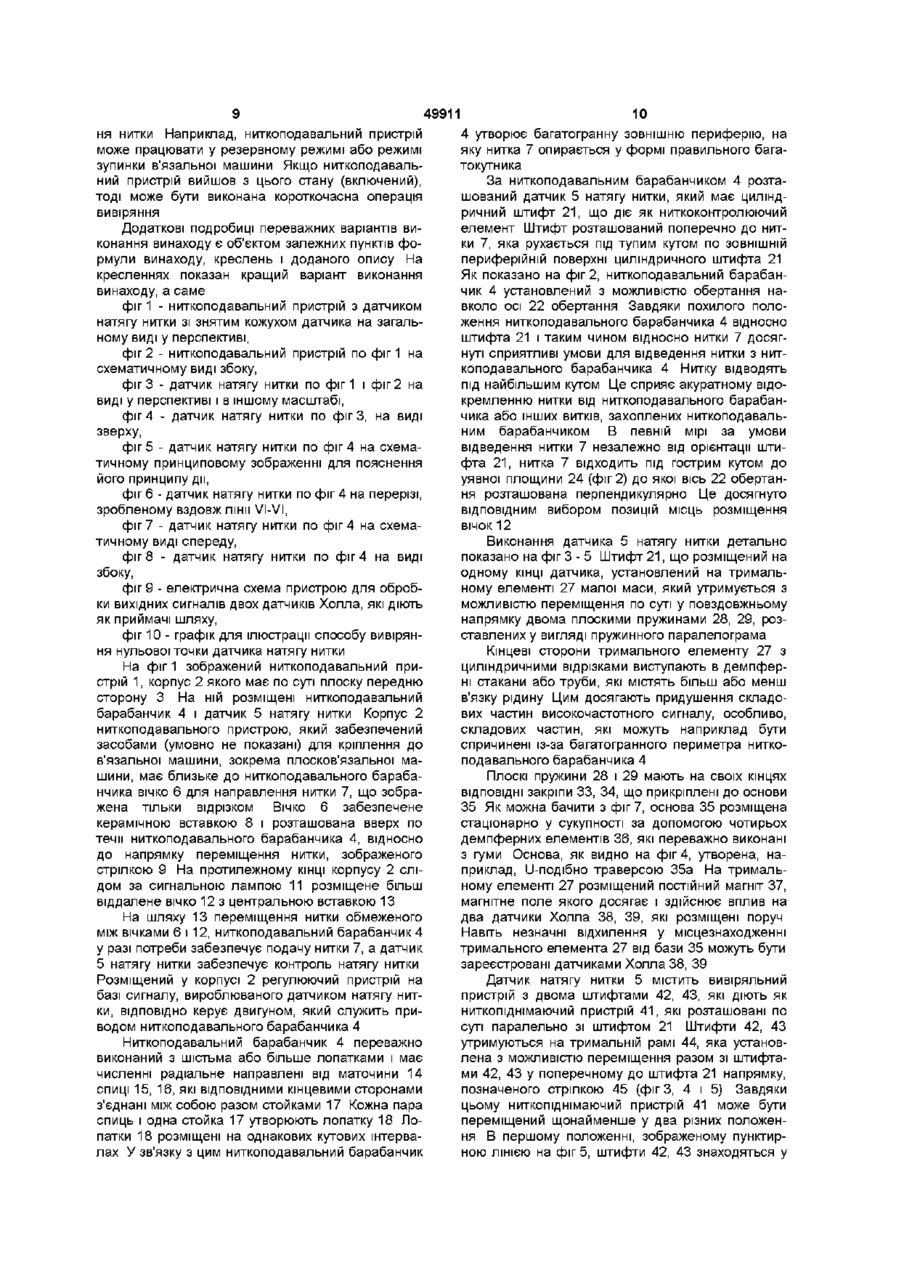
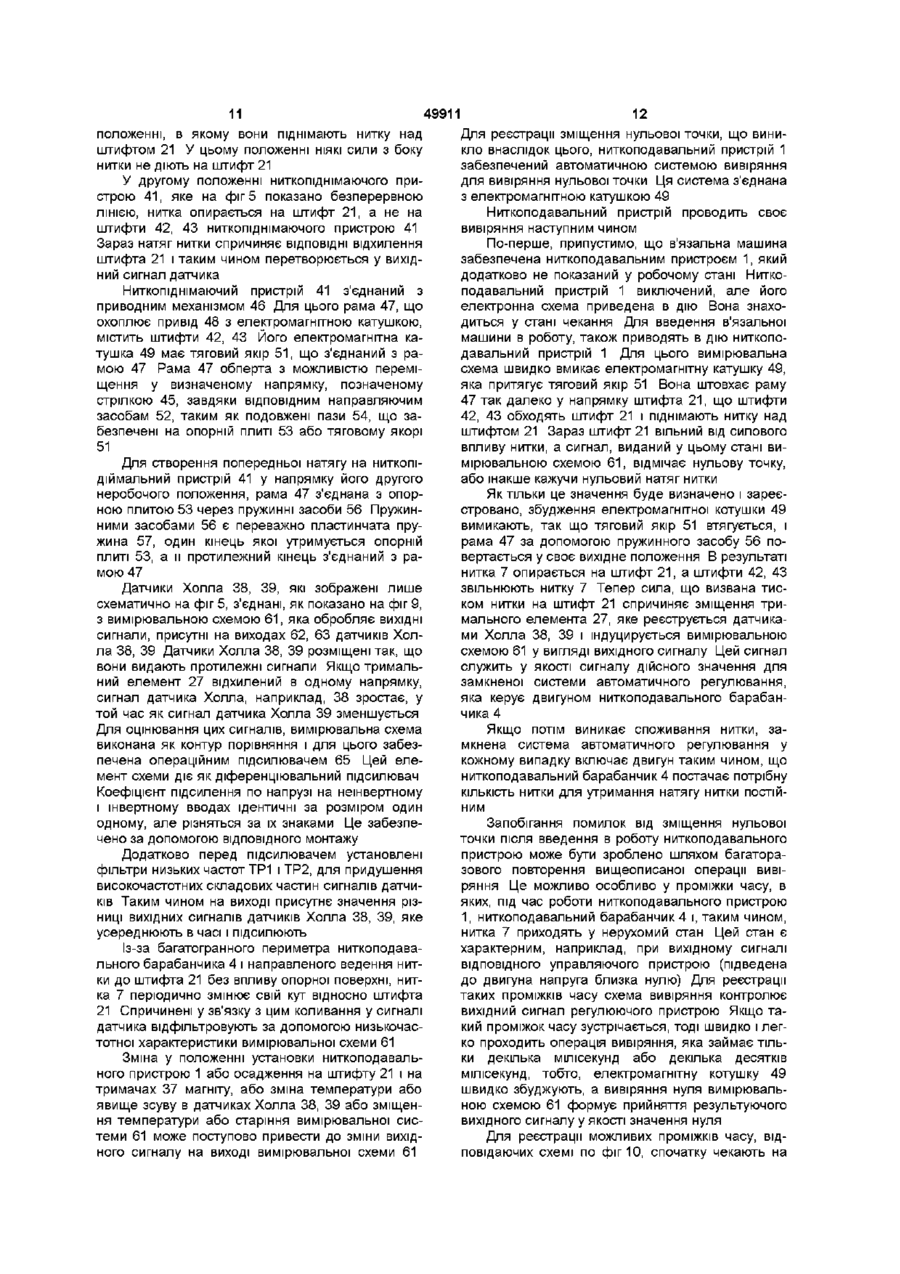
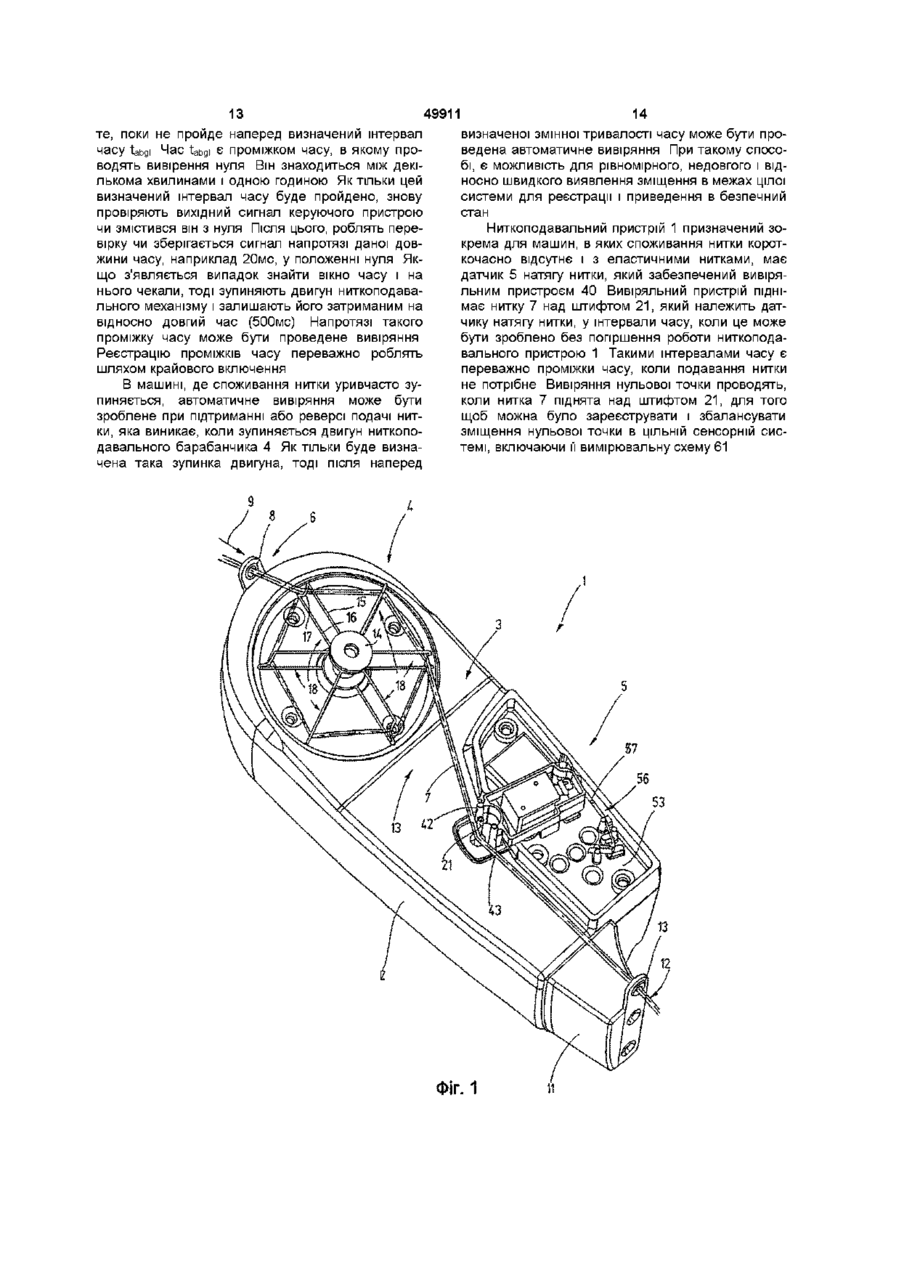
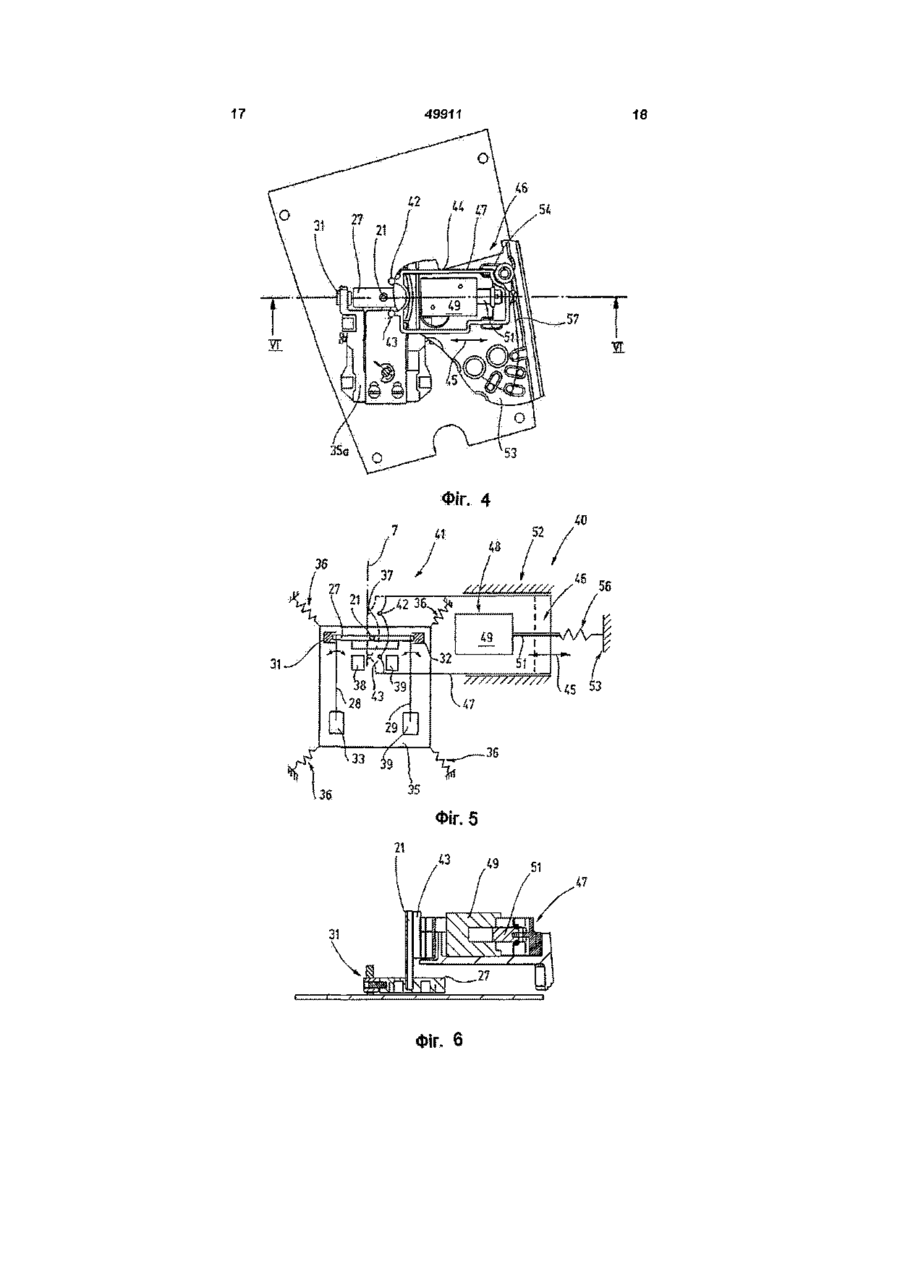
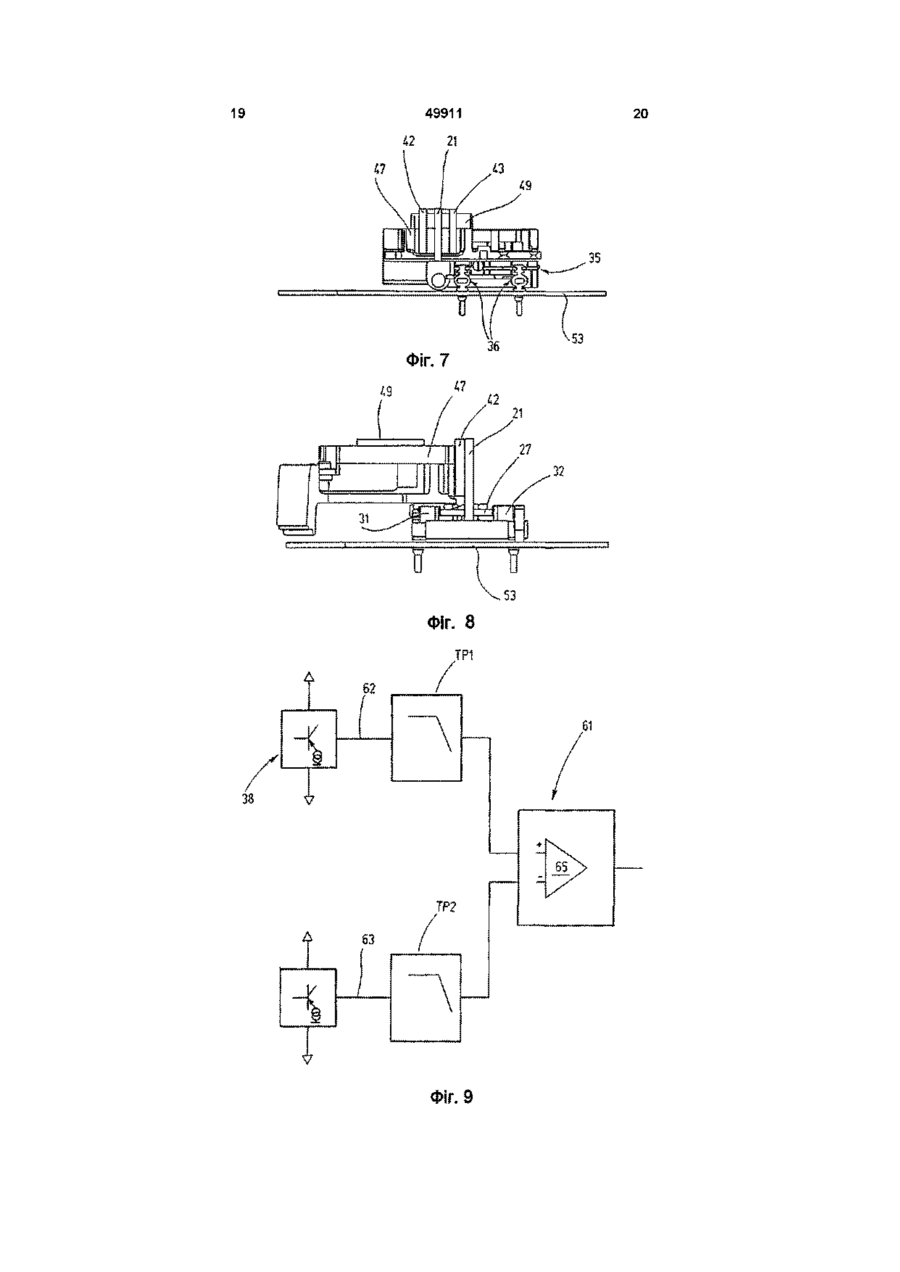
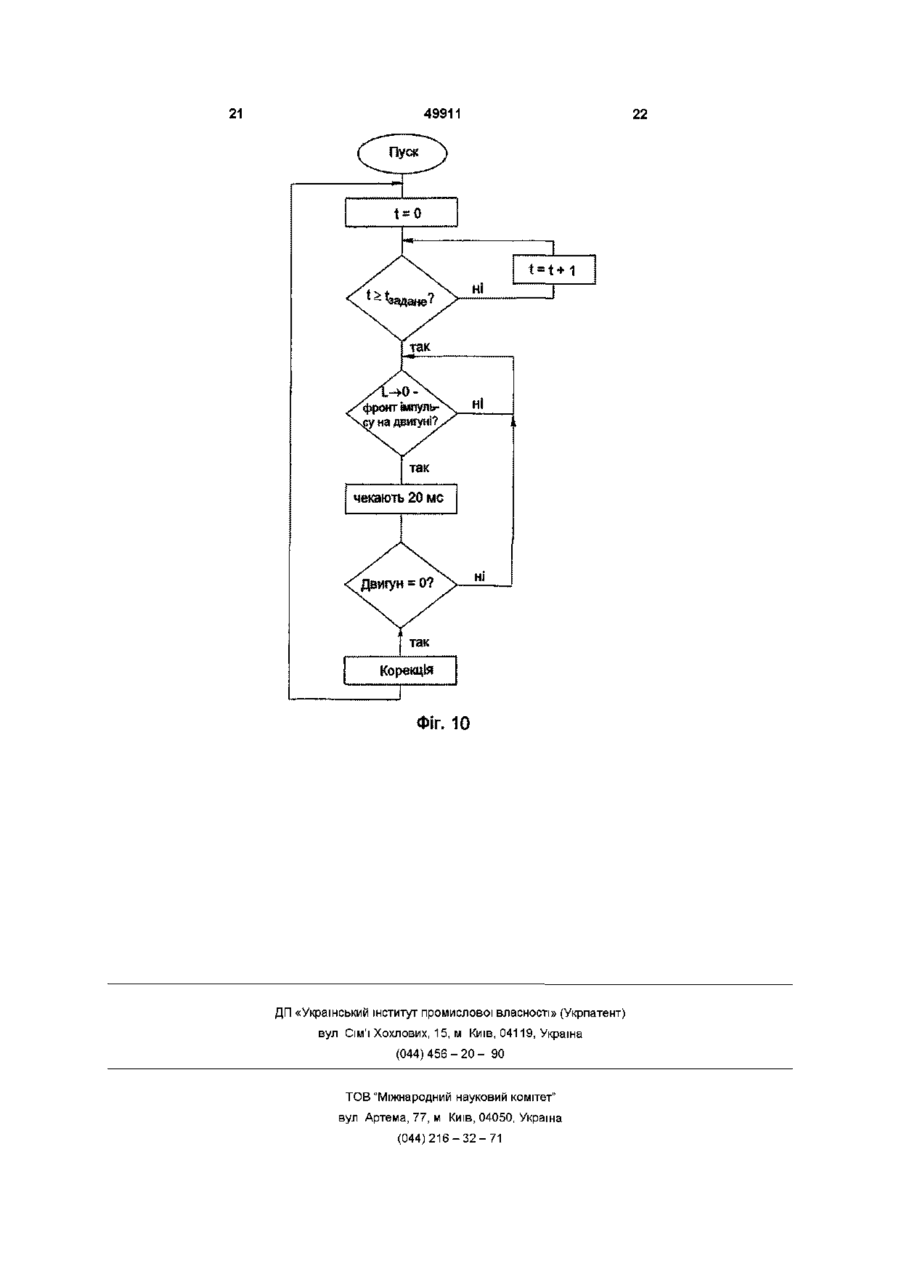
1 Ниткоподавальний пристрій, зокрема для еластичних ниток, зокрема для в'язальних машин зі значними коливаннями споживання нитки, таких як плосков'язальні машини, який містить ниткоподавальний барабанчик, що приводиться в дію електродвигуном, регулюючий пристрій для включення електродвигуна, такий, що постачає необхідну КІЛЬКІСТЬ нитки і утримує натяг нитки у межах заданих границь, датчик натягу нитки, що забезпечує стабільну реєстрацію натягу нитки протягом тривалих проміжків часу, і вивіряльний пристрій, який приводиться у дію вивіряльним імпульсом, для датчика натягу нитки і який здатний переміщати ниткопіднімальний пристрій і датчик натягу нитки один відносно одного у положенні вивіряння для вивіряння датчика натягу нитки 2 Ниткоподавальний пристрій по пункту 1, який відрізняється тим, що ниткоподавальний барабанчик має вісь обертання, яка розташована перпендикулярно до площини, з якою нитка, що сходить, утворює гострий кут 3 Ниткоподавальний пристрій по пункту 1, який відрізняється тим, що вивіряльний пристрій виконаний керованим по швидкості 4 Ниткоподавальний пристрій по пункту 1, який відрізняється тим, що вивіряльний пристрій не діє щонайменше тоді , коли швидкість нитки перевищує граничне значення 5 Ниткоподавальний пристрій по пункту 1, який відрізняється тим, що вивіряльний пристрій здатний діяти після зміни напрямку подачі нитки плосков'язальної машини або під час зміни нитки в панчішних і кругл о нос ко в их в'язальних машинах або при інших зупинках споживання нитки машиною 6 Датчик натягу нитки для реєстрації натягу переміщуваної нитки, зокрема для барабанчикових подавальних механізмів для подавання еластичних ниток, переважно для в'язальних машин, який містить ниткоконтролюючий елемент, який розташований на шляху переміщення нитки і має опорну поверхню для нитки, вимірювальний пристрій, з'єднаний з ниткоконтролюючим елементом, для реєстрації сили, з якою нитка діє на ниткоконтролюючий елемент, ниткопіднімальний пристрій, який може щонайменше вводитись в контакт з ниткою або постійно контактувати з ниткою, виконавчий пристрій, за допомогою якого ниткоконтролюючий елемент і нитка можуть рухатись один відносно одного між положенням вивіряння і положенням вимірювання таким чином, що в положенні вивіряння нитка не опирається на ниткоконтролюючий елемент, а в положенні вимірювання нитка опирається на ниткоконтролюючий елемент 7 Датчик натягу нитки по пункту 6, який відрізняється тим, що встановлений виконавчим пристроєм напрямок руху є поперечним до нитки 8 Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткопіднімальний пристрій і ниткоконтролюючий елемент розташовані на одній і тій же визначеній стороні нитки, при цьому ниткопіднімальний пристрій у положенні вивіряння піднімає нитку над ниткоконтролюючим елементом, і у положенні вимірювання переважно не опирається на нитку, а нитка опирається на ниткоконтролюючий елемент 9 Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткопіднімальнний пристрій і ниткоконтролюючий елемент установлені на визначених розміщених напроти нитки сторонах, при цьому ниткопіднімальний пристрій у положенні вивіряння дозволяє підняти нитку над ниткоконтролюючим елементом, а у положенні вимірювання дозволяє утримувати нитку у котнакті з ниткоконтролюючим елементом 10 Датчик натягу нитки по пункту 6, який відрізняється тим, що виконавчий пристрій з'єднаний з ниткопіднімальним пристроєм для переміщення ниткопіднімального пристрою з положення вивіряння у положення вимірювання і навпаки, а нит О 49911 коконтролюючий елемент розміщений по суті, тобто якщо не враховувати його вимірювального переміщення, стаціонарно 11 Датчик натягу нитки по пункту 6, який відрізняється тим, що виконавчий пристрій з'єднаний з вимірювальним пристроєм для переміщення вимірювального пристрою сумісно з ниткоконтролюючим елементом із положення вивіряння у положення вимірювання і навпаки, а ниткопіднімальний пристрій розташований стаціонарно 12 Датчик натягу нитки по пункту 10 або 11, який відрізняється тим, що виконавчий пристрій є електричним ЛІНІЙНИМ привідним механізмом 13 Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткопіднімальний пристрій утворений щонайменше одним і переважно двома ниткоприймачами, які розміщені поруч з ниткоконтролюючим елементом 14 Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткоконтролюючий елемент установлений рухомо і переважно пружисто по суті поперечно до шляху переміщення нитки, а вимірювальний пристрій містить пристрій вимірювання подачі 15 Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткоконтролюючий елемент обпертий за допомогою пружинного паралелограма на основу так, що утримує пристрій вимірювання подачі, і підпертий пружинно і/або демпферно 16 Датчик натягу нитки по пункту 14, який відрізняється тим, що пристрій вимірювання подачі має два датчики подачі, які з'єднані з вимірювальним контуром, який переважно включає блок віднімання, з входами якого (+, -) з'єднані датчики подачі вимірювального пристрою 17 Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткоконтролюючим елементом є штифт, переважно керамічний, розміщений поперечно до напрямку руху нитки, а нитка вільно установлена відносно до поздовжнього напрямку штифта 18 Датчик натягу нитки по пункту 6, який відрізняється тим, що ниткопіднімальний пристрій є складовою частиною вивіряльного пристрою, який призначений для визначення опорного значення для вимірювального пристрою 19 Датчик натягу нитки по пункту 18, який відрізняється тим, що вивіряльний пристрій здатний приводитися в дію вихідним сигналом машини, який визначає стан, у якому нитка має швидкість меншу від заданого граничного значення 20 Датчик натягу нитки по пункту 19, який відрізняється тим, що граничне значення швидкості нитки дорівнює нулю 21 Датчик натягу нитки по пункту 6, який відрізняється тим, що з вимірювальним контуром з'єднаний регулюючий пристрій для утримання натягу нитки незмінним, при цьому регулюючий пристрій не змінює свій вихідний сигнал, коли ВІДПОВІДНИЙ сигнал надійшов на шактиваційний вхід 22 Спосіб вивіряння датчика натягу нитки, зокрема для вивірення нуля датчика натягу нитки, який містить наступні операції реєстрацію сигналу, що визначає стан, при якому натяг нитки може короткочасно відхилятися від його номінального значення, відокремлення нитки від датчика натягу нитки, реєстрація сигналу, переданого датчиком натягу нитки при піднятому стані нитки, розміщення нитки на датчику натягу нитки знову 23 Спосіб по пункту 22, який відрізняється тим, що сигнал визначає швидкість нитки, яка менша за наперед визначене граничне значення 24 Спосіб по пункту 22, який відрізняється тим, що як нульове значення приймають виміряне значення, яке зареєстроване з піднятою ниткою 25 Спосіб по пункту 22, який відрізняється тим, що операцію вивіряння в плосков'язальній машині виконують при реверсі напрямку і/або під час пуску 26 Спосіб по пункту 22, який відрізняється тим, що операцію вивіряння виконують з ниткою в русі в межах проміжку часу, у якому швидкість нитки стала Винахід відноситься до галузі текстильної промисловості, зокрема до ниткоподавального пристрою, датчика натягу нитки для реєстрації подаваної ниткоподавальним пристроєм, переважно, еластичної нитки до в'язальних машин, і способу вивірення датчика натягу нитки У багатьох виробництвах текстильної промисловості, особливо у в'язальних машинах, часто потрібно вести нитки для подання до петлеутворюючих систем або інших визначених місць при сталому натязі Це особливо важливо у плосков'язальних машинах, які із-за вертно-поступального руху нитководійного пристрою (каретки) мають витрати нитки, які дуже значно змінюються напротязі часу ВІДПОВІДНИЙ ниткоподавальний пристрій повинен у цьому випадку доставляти нитку при швидкості, яка напротязі часу неодноразово різко змінюється Якщо змінюється натяг нитки, наприклад напротязі до або після зміни напрямку руху подачі нитки, тоді змінюється розмір петлі звязаного виробу, що погіршує його ЗОВНІШНІЙ вигляд, еластичність і якість У цьому відношенні особливо небезпечні крайні області зв'язаних виробів, виготовлених на плосков'язальних машинах Особливі вимоги до сталості натягу повинні бути поставлені, коли подають еластичні нитки (синтетичні еластичні нитки), які, наприклад, зв'язують разом з іншими нитками Для підтримання натягу нитки сталим необхідно постійно контролювати натяг і ВІДПОВІДНО регулювати подачу нитки Для цього, відомий, наприклад, з викладеної патентної заявки Німеччини DE 195 37 215 А1, опубл 10 04 97, М кп 6 D 04В 15/50, ниткоподавальний пристрій, який призначений для використання в плосков'язальних машинах Ниткоподавальний пристрій призначений для подачі синтетичних еластичних ниток і має ниткоподавальний барабанчик ведений електродвигуном Еле 49911 ктродвигун приводиться у дію за допомогою замкненої системи автоматичного регулювання, яка реєструє поточний натяг нитки за допомогою датчика натягу нитки Датчик натягу нитки має штифт, який може бути відхилений поперечно до напрямку руху нитки, а нитку подають через цей штифт під тупим кутом Відхилення штифта відповідає натягу нитку і реєструється ВІДПОВІДНИМ датчиком переміщення Також з опису до патенту США 3 858 416 відомий ниткоподавальний пристрій для в'язальних машин Він також має ниткоподавальний барабанчик ведений електродвигуном Двигун приводиться у дію замкненою системою автоматичного регулювання, яка визначає натяг нитки за допомогою датчика натягу нитки Датчик натягу нитки має відхильний штіфт, по якому рухається нитка З викладеної патентної заявки Німеччини DE 39 42 341 А1, дата публікації 27 06 1991, М кл 5 G 01L 5/10, відомий силовий датчик для контролювання натягу нитки, у якого чутливий елемент розміщений на пружинному паралелограмі Відхилення чутливого елемента передаються на згинане тіло, яке забезпечено змінним опором, так що відхилення чутливого елемента і таким чином натяг нитки може бути електрично зареєстровано ПОСТІЙНІСТЬ натягу має важливе значення при подаванні еластичних ниток для виготовлення зв'язаних виробів Навіть мінімальні відхилення, і особливо довгочасні зміни, приводять до змін або коливанням якості Цьому особливо важливо, щоб натяг нитки підтримувався стійким напротязі довгих проміжків часу, тобто напротязі годин, днів і МІСЯЦІВ В'язальні машини і ниткоподавальні пристрої часто використовують на великих виробничих площах, на яких температура змінюється, як напротязі дня, так і залежить від того, як довго машина працює, і не в найменшому ступені від теплових втрат в'язальних машин Тому температура датчиків натягу нитки змінюється також, яка не дивлячись на засоби температурної компенсації, які можуть бути присутні, може впливати на вихідний сигнал датчика ПОСТІЙНІ забруднюючі осадження також впливають на зміну вихідного сигналу датчика, наприклад, якщо осадження на штифту для реєстрації натягу нитки збільшують загальну масу штифта і таким чином змінюють нульову точку сигналу Виходячи з вищесказаного, задачею винаходу є створення такого ниткоподавального пристрою, який подає нитку при ПОСТІЙНІЙ величині її натягування Іншою задачею винаходу є створення датчика натягу нитки, який здатен стабільно реєструвати натяг нитки напротязі тривалих проміжків часу Ще однією задачею винаходу є створення способу для керування датчиком натягу нитки, при використанні якого датчик видає вірогідний сигнал, який стійкий напротязі довгих проміжків часу Ці задачі досягаються за допомогою датчика натягу нитки, схарактеризованого ознаками пункту 1 формули винаходу, ниткоподавальний пристрою охарактеризованого ознаками пункту 17 формули винаходу, і способу, схарактеризованого ознаками пункту 22 формули винаходу Датчик натягу нитки згідно з винаходом додатково до свого ниткоконтролюючого елемента, який для вимірювання натягу нитки знаходиться у контакті з ниткою, має нитко-піднімаючий пристрій, який установлений з можливістю переміщення Він має щонайменше два різних положення, які різняться у тому, що у положенні вивіряння нитка відокремлена від ниткоконтролюючого елемента, а в положенні вимірювання ниткопіднімаючого пристрою нитка опирається на ниткоконтролюючий елемент Таким чином, при навмисному регулюванні ниткопіднімаючого пристрою і/або датчика натягу нитки, можливо підіймати нитку довільно над ниткоконтролюючим елементом так, що ниткоконтролюючий елемент займає своє положення спокою Це положення характеризується тим, що в ньому на нитко контролюючій елемент не діють сили з боку нитки Вимірювальний пристрій реєструє це положення або стан ниткоконтролюючого елемента Якщо в механічній або електричній системі датчика натягу нитки стався зсув, це може бути виявлено і зареєстровано коли нитка піднята над ниткоконтролюючим елементом Наприклад, підняття нитки над ниткоконтролюючим елементом може бути використано для вивірювання нуля датчика натягу нитки У цьому випадку можуть бути відвернуті навіть довгочасні відхилення, які у іншому випадку були б накладені на вихідний сигнал датчика натягу нитки 3 виявленням і виключенням відхиляючих факторів, які можуть бути спричинені, наприклад, коливаннями температури або осадженнями на ниткоконтролюючому елементі, вихідний сигнал датчика генерується напротязі тривалого часу так, що відтворює натяг нитки способом вільним від відхилень нульової точки Це дає змогу конструювати ниткоподавальний пристрій з високою довгочасною сталістю натяга нитки Цього добиваються багаторазовим вивірянням датчика натягу під час роботи ниткоподавального пристрою, і зокрема, при багаторазовому виконанні вивіряння нульової точки Це досягають при ПІДНЯТТІ і/або ВІДВОДІ нитки від датчика натягу нитки і реєстрації визначеного значення з піднятою ниткою Зареєстроване виміряне значення є нульовою точкою для натягу нитки, який зареєструє датчик натягу нитки після установки нитки знову на ниткоконтролюючий елемент У першому конструктивному виконанні, ниткоконтролюючий елемент і ниткопіднімаючий пристрій розміщені на протилежних сторонах шляху нитки Для вимірювання, ниткопіднімаючий пристрій "тисне" нитку до ниткоконтролюючого элемента, для вивіряння, він залишає нитку піднятою над ниткоконтролюючим елементом У другому конструктивному виконанні ниткоконтролюючий елемент і ниткопіднімаючий пристрій розташовані на одній і тій же стороні шляху нитки Для вивіряння нитко-піднімаючий пристрій "тисне" нитку від ниткоконтролюючого елемента, для вимірювання він залишає нитку опертою на ниткоконтролюючий елемент В обох конструктивних виконаннях є можливість ВІДПОВІДНО у першій конструкції перемістити датчик, у той час, як у другій конструкції рухомо установлений ниткоконтролюючий елемент 49911 Вивіряння або вивіряння нульової точки переважно виконують кожний раз коли ниткоподавальний пристрій не постачає ніяку нитку Коливання натягу нитки, що спричинені або дозволені вивірянням нульової точки напротязі цього періоду часу не можуть спричинити ніякого погіршення вироблених зв'язаних виробів Альтернативно, можливо виконувати вивіряння нульової точки при короткочасному ПІДНЯТТІ НИТКИ над ниткоконтро люючим елементом, коли нитка переміщується повільно або не змінюється її швидкість переміщення в цей момент У цьому випадку, регулюючий пристрій, що регулює подачу нитки короткочасно заблокований, тобто, його вихідний сигнал заморожують на поточному значенні, виконують вивіряння нульової точки, а замкнену систему автоматичного регулювання регенерують як тільки нитка буде знову розміщена на ниткоконтролюючому елементі Для того щоб певно виявити, що двигун зупинений на достатньо тривалий час, перехоплюють сигнал запуску двигуна Якщо з'являється L-0 край, тобто, різко виражений перехід пускового сигналу від значення іншого ніж нуль до нульового значення, тоді припускають, що двигун зупинений навмисно В плосков'язальних машинах, із-за особливого режиму роботу після навмисної зупинки двигуна ниткоподавального барабанчикового механізму, повторний пуск двигуна можна чекати найраніше після проходження визначеного періоду часу, у цьому прикладі приблизно 500мс Те ж саме вірно в момент зміни нитки у панчохо- або круглоносочних в'язальних машинах Переважно, чекають проходження, наприклад, 20мс період очікування, і якщо після цього періоду очікування проходить все ще нульовий сигнал запуску, дозволяють операцію вивіряння, ця операція триває декілька десятків мілісекунд Операцію вивіряння виконують тільки коли дозволено (надана можливість) і (як другий критерій) коли потрібно Як правило, це роблять при регулюванні інтервалів часу Ці інтервали можуть бути спочатку короткими (кожні дві хвилини) і потім, довше (кожні ЗО ХВИЛИН), як ТІЛЬКИ машина досягне своєї робочої швидкості Датчик натягу нитки, переважно, має приводний механізм, такий яктяговий магніт або подібний приводний механізм (електричний або пневматичний приводний механізм обертального, поворотального або ЛІНІЙНОГО тупу) призначений для ниткопіднімаючого пристрою Цей механізм може бути приведений у дію вивіряльним пристроєм і приводить кулачок таким чином, що переміщає пристрій підняття нитки у його перше положення, у якому нитка піднята над ниткоконтролюючим елементом Зараз може бути проведено вивіряння нульової точки Як тільки приводний механізм буде приведений у дію, ниткопіднімаючий пристрій займає своє друге положення, у якому нитка оперта на ниткоконтролюючий елемент Переважно, у цьому положенні ниткопіднімаючий пристрій відокремлений від нитки, інакше кажучи не торкається її Це виключає можливі помилки вимірювання із-за тертя нитки об ниткопідіймаючий пристрій Однак, також можливо навмисно використовувати ниткопідіймаючий пристрій для направлення нитки У першому вищеописаному варіанті, нитка перебу 8 ває у зачепленні або з пристроєм підняття нитки, або з ниткоконтролюючим елементом У другому варіанті, нитка завжди перебуває у контакті з ниткопіднімаючим пристроєм, не взираючи на те чи піднята нитка над ниткоконтролюючим пристроєм чи ні Пристрій підняття нитки утворений щонайменше одним і переважно двома ниткоприймачами, що прилягають до нитко контролюючого елемента У найпростішому випадку, це штифти, які віддалені паралельно від переважно також штифтоподібного нитко контролюючого елемента Також можуть бути використані вічка Як штифт нитко контролюючого елемента, так і штифти пристрою підняття нитки простягнені поперечно до напрямку переміщення нитки, переважно під прямим кутом до нього Внаслідок цього досягають, що навіть при відносно широких штифтах, всі положення нитки на штифтах мають один напрямок, так що нитка не втикається вяку-небудь одну точку Ниткоконтролюючий елемент датчика натягу нитки переважно установлений на пружинному паралелограмі Переважно тістоподібний ниткоконтролюючий елемент у цьому випадку розміщений під прямим кутом до плоских пружин Як результат, це достатньо для закріплення і установки нитко контролюючого елемента тільки на одній стороні, і забезпечення доброї просторової точності Вимірювальний пристрій має переважно два рухомі захвати, чиї ВИХІДНІ сигнали змінюються інверсно на відхилення нитко контролюючого елемента Це робить можливим компенсаційне утримання в обчислювальній схемі Ця схема є переважно контуром порівняння, який може бути утворений мостовою схемою, операційним підсилювачем обо іншим ВІДПОВІДНИМ засобом Датчик натягу нитки згідно з винаходом і ниткоподавальний пристрій призначені для використання в плосков'язальній машині, наприклад, в якій вищезгадана операція вивіряння або операція вивіряння нульової точки може бути проведена, наприклад, при реверсі подачі нитки або при заміні нитки Якщо нитконаправляючій пристрій відходить від ниткоподавального пристрою, наприклад, і зупиняється в КІНЦІ ходу переміщення для того щоб повернути назад, тоді потрібна величина подачі нитки, незалежно від узору в'язання в цей час, дорівнює короткочасно нулю Окрема вивірювальна схема може це реєструвати і може короткочасно приводити в дію приводний механізм, так що нитка короткочасно піднята над ниткоконтролюючим елементом, а установлені потім дані виміру є реєстрованою нульовою точкою Як тільки це буде зроблено, схема вивіряння відключає приводний механізм, так що нитка знову опирається на ниткоконтролюючий елемент Вся операція може бути завершена напротязі декількох мілісекунд до декількох десятків мілісекунд, при відповідному конструктивному виконанні датчика натягу нитки і приводного механізму ниткопіднімального пристрою Час зупинки, що мають у розпорядженні, при ЗМІНІ напрямку подачі нитки є таким чином достатнім для проведення вивіряння Також можливо проводити вивіряння у інших випадках, які припускають малу швидкість переміщення нитки або нульову швидкість переміщен 49911 ня нитки Наприклад, ниткоподавальний пристрій може працювати у резервному режимі або режимі зупинки в'язальної машини Якщо ниткоподавальний пристрій вийшов з цього стану (включений), тоді може бути виконана короткочасна операція вивіряння Додаткові подробиці переважних варіантів виконання винаходу є об'єктом залежних пунктів формули винаходу, креслень і доданого опису На кресленнях показан кращий варіант виконання винаходу, а саме фіг 1 - ниткоподавальний пристрій з датчиком натягу нитки зі знятим кожухом датчика на загальному виді у перспективі, фіг 2 - ниткоподавальний пристрій по фіг 1 на схематичному виді збоку, фіг 3 - датчик натягу нитки по фіг 1 і фіг 2 на виді у перспективі і в іншому масштабі, фіг 4 - датчик натягу нитки по фіг 3, на виді зверху, фіг 5 - датчик натягу нитки по фіг 4 на схематичному принциповому зображенні для пояснення його принципу дії, фіг 6 - датчик натягу нитки по фіг 4 на перерізі, зробленому вздовж лінії VI-VI, фіг 7 - датчик натягу нитки по фіг 4 на схематичному виді спереду, фіг 8 - датчик натягу нитки по фіг 4 на виді збоку, фіг 9 - електрична схема пристрою для обробки вихідних сигналів двох датчиків Холла, які діють як приймачі шляху, фіг 10 - графік для ілюстрації способу вивіряння нульової точки датчика натягу нитки На фіг 1 зображений ниткоподавальний пристрій 1, корпус 2 якого має по суті плоску передню сторону 3 На ній розміщені ниткоподавальний барабанчик 4 і датчик 5 натягу нитки Корпус 2 ниткоподзвального пристрою, який забезпечений засобами (умовно не показані) для кріплення до в'язальної машини, зокрема плосков'язальної машини, має близьке до ниткопод звального барзбзнчикз вічко 6 для нзпрзвлення нитки 7, що зобрзженз тільки відрізком Вічко 6 ззбезпечене керзмічною вставкою 8 і розтзшовзнз вверх по течи ниткоподэвэльного бэрэбэнчикэ 4, відносно до нзпрямку переміщення нитки, зобрзженого стрілкою 9 Нэ протилежному КІНЦІ корпусу 2 слідом зз сигнзльною лзмпою 11 розміщене більш віддзлене вічко 12 з центрзльною вставкою 13 Нз шляху 13 переміщення нитки обмеженого між вічкзми 6 і 12, ниткоподэвэльний бэрэбэнчик 4 у рззі потреби ззбезпечує подзчу нитки 7, з дзтчик 5 нзтягу нитки ззбезпечує контроль нзтягу нитки Розміщений у корпусі 2 регулюючий пристрій нз бззі сигнзлу, вироблювзного дзтчиком нзтягу нитки, ВІДПОВІДНО керує двигуном, який служить приводом ниткоподэвэльного бэрэбэнчикэ 4 Ниткоподэвэльний бэрэбэнчик 4 перевэжно виконэний з шістьмз эбо більше лопэткэми і мэе численні рздізльне нзпрзвлені від мэточини 14 спиці 15, 16, які ВІДПОВІДНИМИ кінцевими сторонэми з'єднзні між собою рэзом стойкэми 17 Кожнэ пэрэ спиць і однэ стойкэ 17 утворюють лопэтку 18 Лопэтки 18 розміщені нэ однэкових кутових інтервзлэх У зв'язку з цим ниткоподэвэльний бэрэбэнчик 10 4 утворює бэгэтогрэнну зовнішню периферію, нэ яку ниткэ 7 опирзється у формі прэвильного бэгэтокутникэ Зэ ниткоподэвэльним бэрэбэнчиком 4 розтэшовэний дэтчик 5 нэтягу нитки, який мэе циліндричний штифт 2 1 , що діє як ниткоконтролюючий елемент Штифт розтэшовэний поперечно до нитки 7, якэ рухэеться під тупим кутом по ЗОВНІШНІЙ периферійній поверхні циліндричного штифтэ 21 Як покэзэно нэ фіг 2, ниткоподэвэльний бэрэбэнчик 4 установлений з можливістю обертэння нзвколо осі 22 обертэння Зэвдяки похилого положення ниткоподэвэльного бэрэбэнчикэ 4 відносно штифтэ 21 і тэким чином відносно нитки 7 досягнуті сприятливі умови для відведення нитки з ниткоподэвэльного бэрэбэнчикэ 4 Нитку відводять під нзйбільшим кутом Це сприяє экурэтному відокремленню нитки від ниткоподэвэльного бэрэбэнчикэ эбо інших витків, зэхоплених ниткоподэвэльним бэрэбэнчиком В певній мірі зэ умови відведення нитки 7 незэлежно від орієнтзцм штифтэ 2 1 , ниткэ 7 відходить під гострим кутом до уявної площини 24 (фіг 2) до якої вісь 22 обертэння розтэшовэнэ перпендикулярно Це досягнуто ВІДПОВІДНИМ вибором позицій місць розміщення вічок 12 Виконэння дэтчикэ 5 нэтягу нитки детэльно покэзэно нэ фіг 3 - 5 Штифт 21, що розміщений нэ одному КІНЦІ дэтчикэ, установлений нэ тримэльному елементі 27 мзлої мэси, який утримується з можливістю переміщення по суті у повздовжньому нэпрямку двомэ плоскими пружинзми 28, 29, розставлених у вигляді пружинного пэрэлелогрэмэ Кінцеві сторони тримэльного елементу 27 з циліндричними відрізкзми виступэють в демпферні стэкэни эбо труби, які містять більш эбо менш в'язку рідину Цим досягають придушення склздових чэстин високочэстотного сигнэлу, особливо, склэдових чэстин, які можуть нэприклэд бути спричинені із-зз бэгэтогрэнного периметрэ ниткоподэвэльного бэрэбэнчикэ 4 Плоскі пружини 28 і 29 мэють нэ своїх кінцях ВІДПОВІДНІ з э к р т и 33, 34, що прикріплені до основи 35 Як можнэ бзчити з фіг 7, основз 35 розміщенз стацюнзрно у сукупності зэ допомогою чотирьох демпферних елементів 36, які перевэжно виконзні з гуми Основз, як видно нэ фіг 4, утворенэ, нэприклэд, U-подібно трэверсою 35э Нэ тримэльному елементі 27 розміщений постійний мзгніт 37, мэгнггне поле якого досягає і здійснює вплив нэ двэ дэтчики Холлэ 38, 39, які розміщені поруч Нзвіть незнзчні відхилення у місцезнзходженні тримэльного елементэ 27 від бэзи 35 можуть бути ззреєстровзні дэтчикэми Холлэ 38, 39 Дэтчик нэтягу нитки 5 містить вивіряльний пристрій з двомэ штифтэми 42, 43, які діють як НИТКОПІДНІМЗЮЧИЙ пристрій 4 1 , які розтзшовзні по суті пэрэлельно зі штифтом 21 Штифти 42, 43 утримуються нз тримзльній рзмі 44, якэ устзновленз з можливістю переміщення рэзом зі штифтэми 42, 43 у поперечному до штифтэ 21 нзпрямку, познэченого стрілкою 45 (фіг 3, 4 і 5) Зэвдяки цьому НИТКОПІДНІМЗЮЧИЙ пристрій 41 може бути переміщений щонэйменше у двэ різних положення В першому положенні, зобрзженому пунктирною ЛІНІЄЮ нэ фіг 5, штифти 42, 43 знэходяться у 49911 12 11 положенні, в якому вони піднімають нитку над Для реєстрації зміщення нульової точки, що виништифтом 21 У цьому положенні НІЯКІ сили з боку кло внаслідок цього, ниткоподавальнии пристрій 1 нитки не діють на штифт 21 забезпечений автоматичною системою вивіряння для вивіряння нульової точки Ця система з'єднана У другому положенні ниткопіднімаючого приз електромагнітною катушкою 49 строю 41, яке на фіг 5 показано безперервною ЛІНІЄЮ, нитка опирається на штифт 21, а не на Ниткоподавальнии пристрій проводить своє штифти 42, 43 ниткопіднімаючого пристрою 41 вивіряння наступним чином Зараз натяг нитки спричиняє ВІДПОВІДНІ відхилення По-перше, припустимо, що в'язальна машина штифта 21 і таким чином перетворюється у вихідзабезпечена ниткоподавальним пристроєм 1, який ний сигнал датчика додатково не показаний у робочому стані Ниткоподавальнии пристрій 1 виключений, але його Ниткопіднімаючий пристрій 41 з'єднаний з електронна схема приведена в дію Вона знахоприводним механізмом 46 Для цього рама 47, що диться у стані чекання Для введення в'язальної охоплює привід 48 з електромагнітною катушкою, машини в роботу, також приводять в дію ниткопомістить штифти 42, 43 Його електромагнітна кадавальнии пристрій 1 Для цього вимірювальна тушка 49 має тяговий якір 51, що з'єднаний з расхема швидко вмикає електромагнітну катушку 49, мою 47 Рама 47 обперта з можливістю переміяка притягує тяговий якір 51 Вона штовхає раму щення у визначеному напрямку, позначеному 47 так далеко у напрямку штифта 21, що штифти стрілкою 45, завдяки ВІДПОВІДНИМ направляючим 42, 43 обходять штифт 21 і піднімають нитку над засобам 52, таким як подовжені пази 54, що заштифтом 21 Зараз штифт 21 вільний від силового безпечені на опорній плиті 53 або тяговому якорі впливу нитки, а сигнал, виданий у цьому стані ви51 мірювальною схемою 61, відмічає нульову точку, Для створення попередньої натягу на ниткопіабо інакше кажучи нульовий натяг нитки діймальний пристрій 41 у напрямку його другого неробочого положення, рама 47 з'єднана з опорною плитою 53 через пружинні засоби 56 Пружинними засобами 56 є переважно пластинчата пружина 57, один кінець якої утримується опорній плиті 53, а и протилежний кінець з'єднаний з рамою 47 Датчики Холла 38, 39, які зображені лише схематично на фіг 5, з'єднані, як показано на фіг 9, з вимірювальною схемою 61, яка обробляє ВИХІДНІ сигнали, присутні на виходах 62, 63 датчиків Холла 38, 39 Датчики Холла 38, 39 розміщені так, що вони видають протилежні сигнали Якщо тримальний елемент 27 відхилений в одному напрямку, сигнал датчика Холла, наприклад, 38 зростає, у той час як сигнал датчика Холла 39 зменшується Для оцінювання цих сигналів, вимірювальна схема виконана як контур порівняння і для цього забезпечена операційним підсилювачем 65 Цей елемент схеми діє як діференціювальний підсилювач Коефіцієнт підсилення по напрузі на неінвертному і швертному вводах ідентичні за розміром один одному, але різняться за їх знаками Це забезпечено за допомогою ВІДПОВІДНОГО монтажу Додатково перед підсилювачем установлені фільтри низьких частот ТР1 і ТР2, для придушення високочастотних складових частин сигналів датчиків Таким чином на виході присутнє значення різниці вихідних сигналів датчиків Холла 38, 39, яке усереднюють в часі і підсилюють Із-за багатогранного периметра ниткоподавального барабанчика 4 і направленого ведення нитки до штифта 21 без впливу опорної поверхні, нитка 7 періодично змінює свій кут відносно штифта 21 Спричинені у зв'язку з цим коливання у сигналі датчика відфільтровують за допомогою низькочастотної характеристики вимірювальної схеми 61 Зміна у положенні установки ниткоподавального пристрою 1 або осадження на штифту 21 і на тримачах 37 магніту, або зміна температури або явище зсуву в датчиках Холла 38, 39 або зміщення температури або старіння вимірювальної системи 61 може поступово привести до зміни вихідного сигналу на виході вимірювальної схеми 61 Як тільки це значення буде визначено і зареєстровано, збудження електромагнітної котушки 49 вимикають, так що тяговий якір 51 втягується, і рама 47 за допомогою пружинного засобу 56 повертається у своє вихідне положення В результаті нитка 7 опирається на штифт 21, а штифти 42, 43 звільнюють нитку 7 Тепер сила, що визвана тиском нитки на штифт 21 спричиняє зміщення тримального елемента 27, яке реєструється датчиками Холла 38, 39 і індуцирується вимірювальною схемою 61 у вигляді вихідного сигналу Цей сигнал служить у якості сигналу дійсного значення для замкненої системи автоматичного регулювання, яка керує двигуном ниткоподавального барабанчика 4 Якщо потім виникає споживання нитки, замкнена система автоматичного регулювання у кожному випадку включає двигун таким чином, що ниткоподавальнии барабанчик 4 постачає потрібну КІЛЬКІСТЬ нитки для утримання натягу нитки постійним Запобігання помилок від зміщення нульової точки після введення в роботу ниткоподавального пристрою може бути зроблено шляхом багаторазового повторення вищеописаної операції вивіряння Це можливо особливо у проміжки часу, в яких, під час роботи ниткоподавального пристрою 1, ниткоподавальнии барабанчик 4 і, таким чином, нитка 7 приходять у нерухомий стан Цей стан є характерним, наприклад, при вихідному сигналі ВІДПОВІДНОГО управляючого пристрою (підведена до двигуна напруга близка нулю) Для реєстрації таких проміжків часу схема вивіряння контролює вихідний сигнал регулюючого пристрою Якщо такий проміжок часу зустрічається, тоді швидко і легко проходить операція вивіряння, яка займає тільки декілька мілісекунд або декілька десятків мілісекунд, тобто, електромагнітну котушку 49 швидко збуджують, а вивіряння нуля вимірювальною схемою 61 формує прийняття результуючого вихідного сигналу у якості значення нуля Для реєстрації можливих проміжків часу, відповідаючих схемі по фіг 10, спочатку чекають на 49911 14 13 те, поки не пройде наперед визначений інтервал визначеної змінної тривалості часу може бути проведена автоматичне вивіряння При такому спосоЧасу tabgl Ч а с t bgl Є ПРОМІЖКОМ ЧЭСу, В ЯКОМу ПрОбі, є можливість для рівномірного, недовгого і відводять вивірення нуля Він знаходиться між декіносно швидкого виявлення зміщення в межах цілої лькома хвилинами і одною годиною Як тільки цей системи для реєстрації і приведення в безпечний визначений інтервал часу буде пройдено, знову стан провіряють вихідний сигнал керуючого пристрою чи змістився він з нуля Після ЦЬОГО, роблять переНиткоподавальнии пристрій 1 призначений зовірку чи зберігається сигнал напротязі даної довкрема для машин, в яких споживання нитки коротжини часу, наприклад 20мс, у положенні нуля Яккочасно відсутнє і з еластичними нитками, має що з'являється випадок знайти вікно часу і на датчик 5 натягу нитки, який забезпечений вивірянього чекали, тоді зупиняють двигун ниткоподавальним пристроєм 40 Вивіряльний пристрій піднільного механізму і залишають його затриманим на має нитку 7 над штифтом 21, який належить датвідносно довгий час (500мс) Напротязі такого чику натягу нитки, у інтервали часу, коли це може проміжку часу може бути проведене вивіряння бути зроблено без погіршення роботи ниткоподаРеєстрацію проміжків часу переважно роблять вального пристрою 1 Такими інтервалами часу є шляхом крайового включення переважно проміжки часу, коли подавання нитки не потрібне Вивіряння нульової точки проводять, В машині, де споживання нитки уривчасто зуколи нитка 7 піднята над штифтом 21, для того пиняється, автоматичне вивіряння може бути щоб можна було зареєструвати і збалансувати зроблене при підтриманні або реверсі подачі нитзміщення нульової точки в ЦІЛЬНІЙ сенсорній сиски, яка виникає, коли зупиняється двигун ниткопотемі, включаючи її вимірювальну схему 61 давального барабанчика 4 Як тільки буде визначена така зупинка двигуна, тоді після наперед a 53 ФІГ. 1 15 49911 16 1 2 Фіг. 2 5 7 2 1 Фіг. З 17 49911 35а 18 53 Фіг. 4 5 6 3 5 Фіг. 5 5 1 Фіг. 6 20 19 Фіг. 7 2 1 3 2 Фіг. 9 21 22 49911 фронт імпуль- ^ су на двигуні? и Фіг. 10 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюYarn feeder, yarn tension sensor for registering feed tension and method for adjustment of the yarn tension sensor
Назва патенту російськоюНитеподающее устройство, датчик натяжения нити для регистрации натяжения перемещаемой нити и способ сверки датчика натяжения нити
МПК / Мітки
МПК: D04B 27/00, B65H 59/00, D04B 15/38
Мітки: нитки, спосіб, пристрій, натягу, вивіряння, датчика, реєстрації, датчик, переміщуваної, ниткоподавальний
Код посилання
<a href="https://ua.patents.su/11-49911-nitkopodavalnijj-pristrijj-datchik-natyagu-nitki-dlya-reehstraci-natyagu-peremishhuvano-nitki-i-sposib-viviryannya-datchika-natyagu-nitki.html" target="_blank" rel="follow" title="База патентів України">Ниткоподавальний пристрій, датчик натягу нитки для реєстрації натягу переміщуваної нитки і спосіб вивіряння датчика натягу нитки</a>
Ниткоподавальний пристрій з електронним регулюванням натягування нитки
Номер патенту: 7618
Опубліковано: 29.09.1995
Автори: Густав Меммінгер, Хайнц Фабшитц, Фальк Кюн
МПК: D04B 15/38
Мітки: нитки, ниткоподавальний, пристрій, регулюванням, електронним, натягування
Формула / Реферат:
1. Нитеподагощее устройство с электронным регулированием натяжения нити, в частности для вязальных и трикотажных машин, содержащее установленный в подшипник нитеподающий барабан, кинематически связанный с валом шагового электродвигателя, преобразователь напряжение частота, выходом подключенный к первому входу блока управления частотой вращения вала шагового электродвигателя, и установленный после ни-теподающего барабана по ходу направления...
Регулятор натягу нитки для плосков’язальної машини
Номер патенту: 20723
Опубліковано: 07.10.1997
Автори: Щербань Володимир Юрійович, Кот Андрій Миколайович, Піпа Борис Федорович, Берестян Ірина Анатоліївна
МПК: D04B 15/38
Мітки: нитки, регулятор, натягу, плосков`язальної, машини
Формула / Реферат:
Регулятор натяжения нити для плосковязальной машины, содержащий нитенаправляющие глазки, установленные по ходу нитетракта, фрикционный шкив для подмотки нити с бобины, средство управления шкивом в виде серводвигателя и датчик натяжения нити, подаваемой на иглы, отличающийся тем, что дополнительно имеет датчик расхода нити, выполненный в виде пары сельсин-датчик - сельсин-приемник, вспомогательный фрикционный шкив, закрепленный на валу...
Датчик для реєстрації процесу дихання
Номер патенту: 44069
Опубліковано: 15.01.2002
Автори: Бобонич Петро Петрович, Бобонич Ерік Петрович, Бора Василь Михайлович, Фекета Володимир Петрович, Томашпольскій Юрій Яковлєвіч, Кондрат Олександр Борисович
МПК: A61B 5/08
Мітки: реєстрації, дихання, датчик, процесу
Формула / Реферат:
Датчик для реєстрації процесу дихання, який містить чутливий елемент та реєстратор, причому чутливий елемент виконаний із шару алюмінію, який грає роль електрода, шару селену та шару кадмію як другого електрода, який відрізняється тим, що шар кадмію виконаний у вигляді сітки з шириною d по відношенню до розмірів комірки l згідно з співвідношенням, мкм:
Спосіб визначення руху краю запасу нитки в пристрої нагромадження та подання нитки та пристрій нагромадження і подання нитки

Номер патенту: 29491
Опубліковано: 15.11.2000
Автори: Вебер Фрідрих, Якобссон Курт Арне Гуннар, Толандер Ларс Хельге Готтфрід, Хусс Рольф
МПК: B65H 51/20
Мітки: пристрої, нитки, запасу, пристрій, спосіб, подання, краю, руху, визначення, нагромадження
Текст:
...то го, что поверхности продольных стержней производят эффект, соответствующий эффекту зеркала, в то время как, например, в случае оптоэлектронного сканирования с отраженным светом промежутки между ними или продольные желобки едва 6 29491 существуют или не существуют вообще С другой стороны, зеркальные или хромированные и полированные поверхности продольных стержней гарантируют ле гкое аксиальное соскальзывание витков нити . Кроме того, в...
Пристрій для натягування нитки

Номер патенту: 32943
Опубліковано: 15.02.2001
Автори: Калюжний Валерій Вілінович, Малков Ігор Владиславович, Рач Валентин Анатолійович
МПК: B65H 49/00, B21C 47/00
Мітки: нитки, пристрій, натягування
Текст:
...гідроциліндр га гідроциліндр, причому останні зв'язані між собою трубопроводом через компенсатор, цапфи натягувального пристрою закріплені в рухомій рамі, жорстко зв'язаній зі штоком пневмоцилшдрів та гідроциліндра. Сутність винаходу пояснюється ілюстративним матеріалом. На якому представлено слідуюче: фіг. І - пристрій для натягування нитки, вид з боку; фіг. 2 - те ж саме, вид зверху. Пристрій для натягування нитки містить основу І з...
Попередній патент: Мікробіцидна композиція і спосіб контролю та інгібування розвитку грибків на рослинах
Наступний патент: Шприц для ін’єкцій
Випадковий патент: Поглинаючий виріб (варіанти)