Пристрій ідентифікації номерних знаків рухомих об’єктів
Номер патенту: 69958
Опубліковано: 25.05.2012
Автори: Стасюк Олександр Іонович, Горейко Сергій Миколайович, Білан Степан Миколайович, Калинюк Ірина Олександрівна

Формула / Реферат
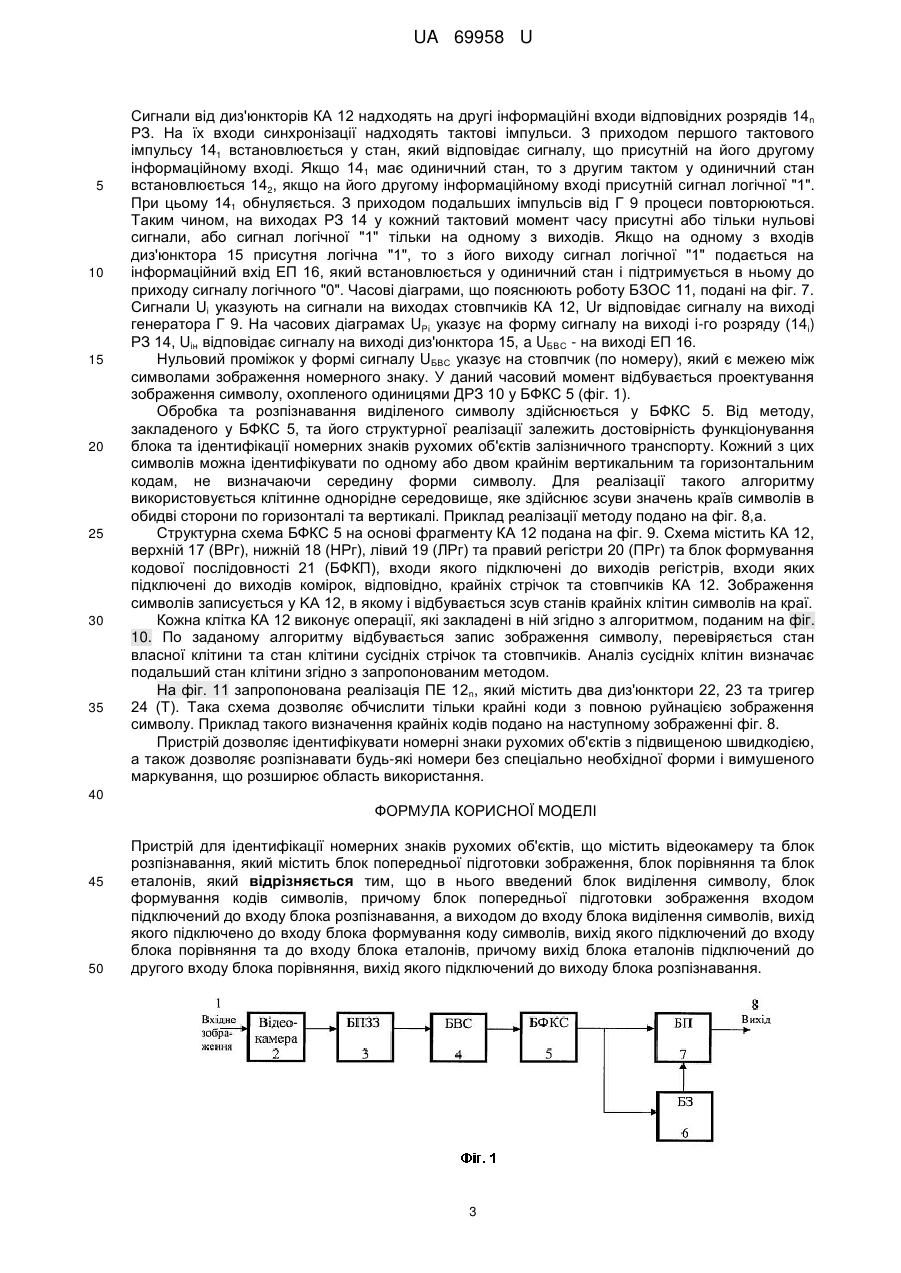
Пристрій для ідентифікації номерних знаків рухомих об'єктів, що містить відеокамеру та блок розпізнавання, який містить блок попередньої підготовки зображення, блок порівняння та блок еталонів, який відрізняється тим, що в нього введений блок виділення символу, блок формування кодів символів, причому блок попередньої підготовки зображення входом підключений до входу блока розпізнавання, а виходом до входу блока виділення символів, вихід якого підключено до входу блока формування коду символів, вихід якого підключений до входу блока порівняння та до входу блока еталонів, причому вихід блока еталонів підключений до другого входу блока порівняння, вихід якого підключений до виходу блока розпізнавання.
Текст
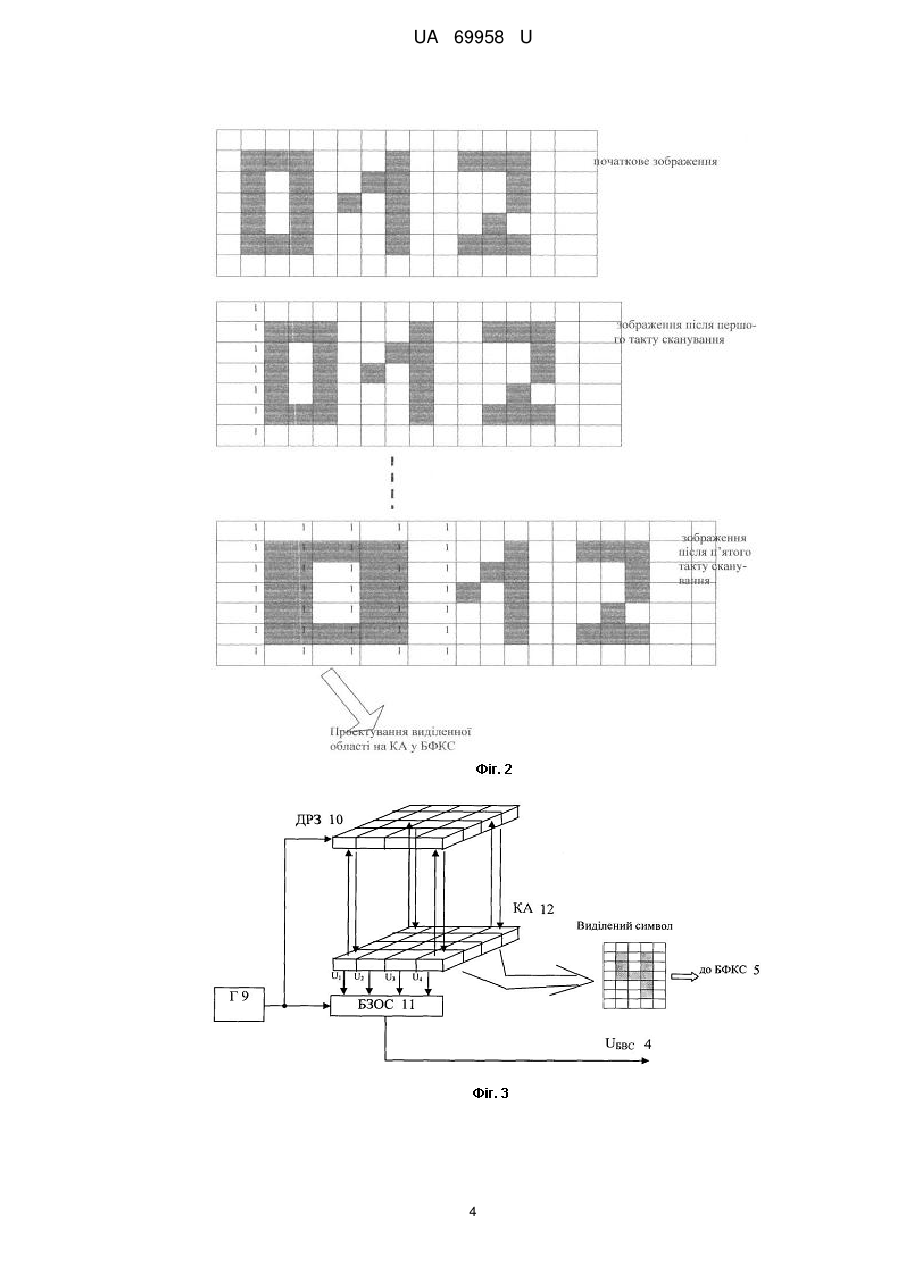
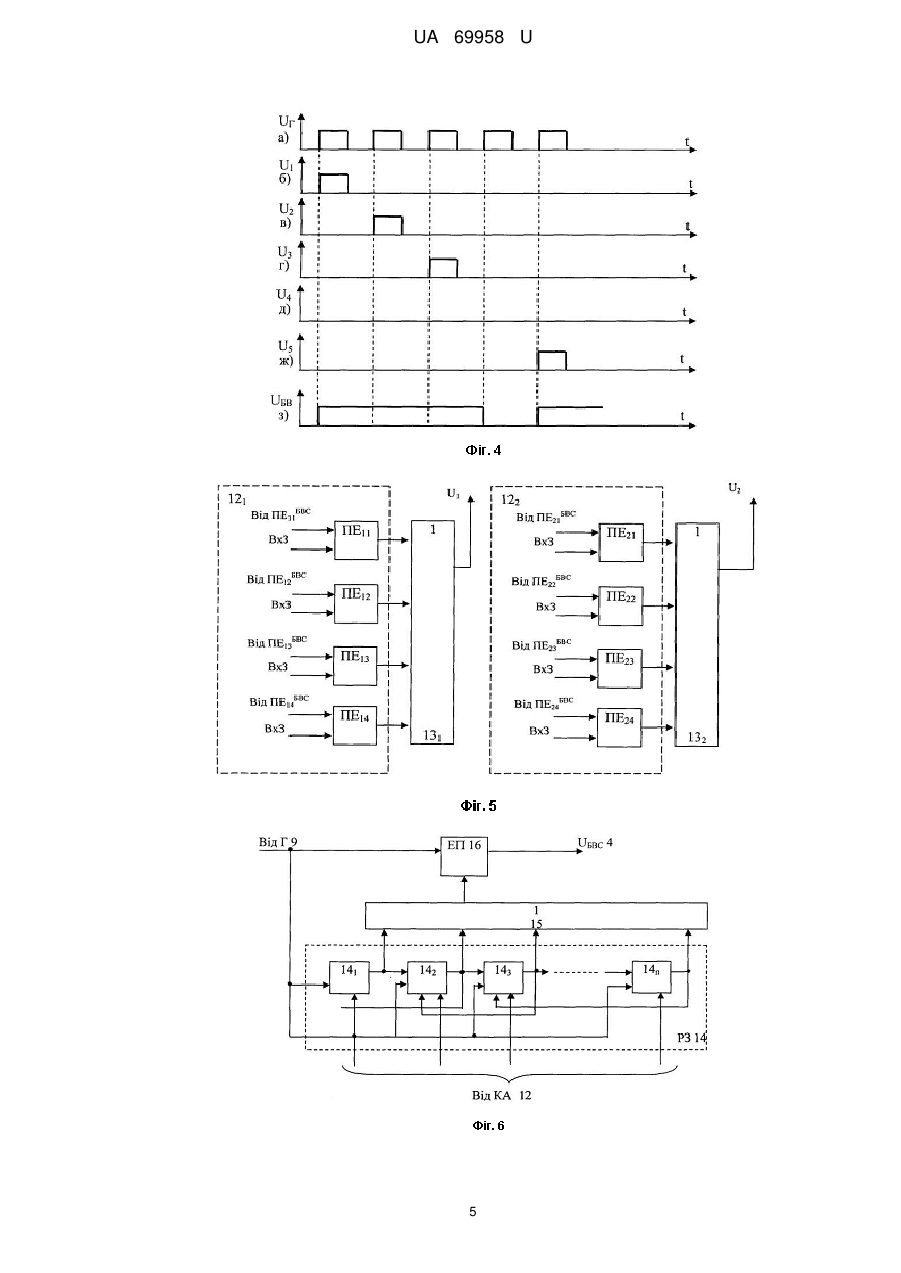
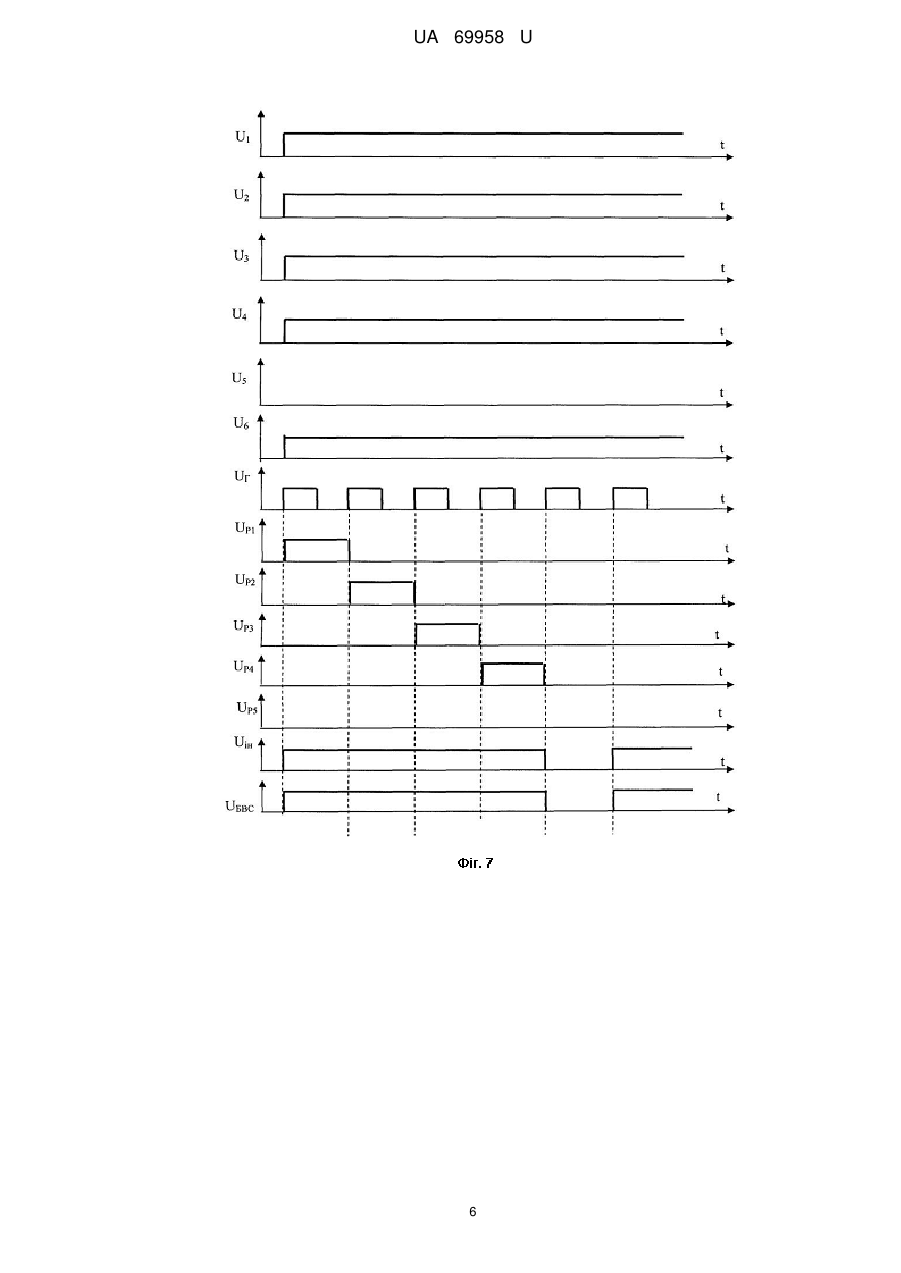
Реферат: Пристрій для ідентифікації номерних знаків рухомих об'єктів містить відеокамеру та блок розпізнавання, який містить блок попередньої підготовки зображення, блок порівняння та блок еталонів. В нього введений блок виділення символу, блок формування кодів символів, причому блок попередньої підготовки зображення входом підключений до входу блока розпізнавання, а виходом до входу блока виділення символів, вихід якого підключено до входу блока формування коду символів, вихід якого підключений до входу блока порівняння та до входу блока еталонів, причому вихід блока еталонів підключений до другого входу блока порівняння, вихід якого підключений до виходу блока розпізнавання. UA 69958 U (54) ПРИСТРІЙ ІДЕНТИФІКАЦІЇ НОМЕРНИХ ЗНАКІВ РУХОМИХ ОБ'ЄКТІВ UA 69958 U UA 69958 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до інформаційних систем і може бути застосована для зчитування інформації з рухомих об'єктів, які не мають автономних джерел живлення, наприклад залізничні вагони. Відомий пристрій для розпізнавання образів [А.С. №201008538, БИ № 24, 2010 p.], що містить блок порогових елементів, блок зважування, обчислювальний блок, блок упорядкування навчальних сигналів, входи якого підключені до виходів блока порогових елементів, і блок формування цілочисельних ваг, входи якого з'єднані з відповідними виходами блока упорядкування навчальних сигналів, а виходи - з керуючими входами блока зважування. Недоліками даного пристрою є обмежені функціональні можливості та область застосування в зв'язку з неможливістю розпізнавати образи рухомих об'єктів. Відомий пристрій ідентифікації об'єктів на конвеєрі згідно з способом [А.С. № 201008685, БИ № 2, 2011 p., фіг. 1], який містить блок створення растрової матриці зображення об'єкта, блок розрахунку середнього значення площі зображення об'єкта, блок керування розрахунком площі зображення об'єкта, блок порівняння розрахункової та еталонної площ зображення об'єкта, блок значень площ еталонних об'єктів та блок прийняття рішення про ідентифікацію. До недоліків даного пристрою належить низька швидкодія, що обумовлена послідовним характером виконання операції вимірювання площі зображення об'єкта у полі растрової матриці, що призводить до погрішності при обробці та ідентифікації рухомих об'єктів. Найбільш близьким за технічним змістом є пристрій згідно з способом ідентифікації рухомих об'єктів [А.С. № 201014402, БИ № 14, 2011 р., фіг. 2], який містить блок попередньої підготовки зображення, блок однорідного клітинного середовища з гексагональним покриттям, регістри масивів - спектрограм символу, блок порівняння та прийняття рішень, регістри масивів спектрограм еталонних символів, блок еталонів та накопичуючий регістр, вхід якого підключений до виходу блока порівняння та прийняття рішень, керуючі виходи якого підключені, відповідно, до керуючих входів блока попередньої підготовки зображення та блока еталонів. Вихід блока попередньої підготовки зображення підключений до входу блока однорідного клітинного середовища з гексагональним покриттям, виходи якого, відповідно, підключені до входів регістрів масивів - спектрограм символу, керуючий вихід блока попередньої підготовки зображення підключений до керуючого входу блока порівняння та прийняття рішень. Виходи регістрів масивів - спектрограм символу та регістри масивів - спектрограм еталонних символів підключені до відповідних входів блока порівняння та прийняття рішень, а виходи блока еталонів - до виходів відповідних регістрів масивів - спектрограм еталонних символів. Недоліком даного пристрою є низька швидкодія, яка обумовлена необхідністю порівняння усіх трафаретних шрифтів з вхідним оцифрованим зображенням, а також необхідністю сканування та формування діаграм з подальшим їх порівнянням. Крім того, даний пристрій потребує додаткових перетворювачів та розширення пам'яті для зберігання еталонних гістограм. В основу корисної моделі поставлена задача створення пристрою ідентифікації вагонів по їх номерних знаках, за рахунок введення нових блоків та зв'язків, що дає можливість зменшити час, який витрачається на ідентифікацію номерного знака, а також розширити область вимірювання за рахунок можливості ідентифікації номерів будь-якої форми подання. Поставлена задача вирішується тим, що пристрій для ідентифікації номерних знаків рухомих об'єктів містить відеокамеру та блок розпізнавання, який містить блок попередньої підготовки зображення, блок порівняння та блок еталонів, блок виділення символу, блок формування кодів символів, причому блок попередньої підготовки зображення входом підключений до входу блока розпізнавання, а виходом до входу блока виділення символів, вихід якого підключено до входу блока формування коду символів, вихід якого підключений до входу блока порівняння та до блока еталонів, причому вихід блока еталонів підключений до другого входу блока порівняння, вихід якого підключений до виходу блока розпізнавання. На фіг. 1 подана структурна схема пристрою ідентифікації номерних знаків рухомих об'єктів; на фіг. 2 - графічне пояснення способу виділення символу з номерного знаку; на фіг. 3 структурна схема блока виділення символу; на фіг. 4 - часові діаграми, що пояснюють роботу БВС; на фіг. 5 - фрагмент схеми клітинного автомата; на фіг. 6 - функціональна схема блока зберігання одиничного сигналу; на фіг. 7 - часові діаграми, що пояснюють роботу БЗОС; на фіг. 8 - приклад графічного пояснення визначення крайніх кодів; на фіг. 9 - структурна схема блока формування кодів символів; на фіг. 10 - граф. схема алгоритму функціонування клітини клітинного автомата; на фіг. 11 - функціональна схема процесорних елементів для виділення крайніх кодів. Структурна схема пристрою ідентифікації номерних знаків рухомих об'єктів подана на фіг. 1. Пристрій містить вхід 1 вхідного зображення, відеокамеру 2, початковий блок 3 проекції та 1 UA 69958 U 5 10 15 20 25 30 35 40 45 50 55 60 зберігання зображення (БПЗЗ), блок 4 виділення символу (БВС), блок 5 формування кодів символів (БФКС), блок 6 порівняння (БП), блок 7 зберігання (БЗ) та вихід 8. Пристрій функціонує у такий спосіб: БПЗЗ 3 реалізується матрицею процесорних елементів (ПЕ), кожний з яких має вхід запису та вхід стану, а також реалізований як запам'ятовуючий елемент. Фактично БПЗЗ 3 здійснює запам'ятовування та перетворення оптичного сигналу зображення. Перетворене зображення з виходів БПЗЗ проектується на вхідну апертуру БВС 4, в якому здійснюється виділення кожного символу по знакомісцю і визначається межа між сусідніми символами. Кожний виділений символ передається до БФКС 5, де здійснюється його обробка та формування кодів, що описують символ. Сформовані послідовності кодів записуються у блок БЗ 6 з привласненням ідентифікатора кожному символу. При цьому виділяються ті числа послідовності, які різко відрізняють його від інших. Чим менше чисел описують символ номеру, тим вище ступінь стиску інформації про зображення символу. Таким чином, формування кодів символів та зберігання їх у БЗ 6 здійснюється навчанням системи. Коли система навчена за допомогою БП 7 здійснюється порівняння кодів, сформованих на виході БФКС 5, та кодів, що зберігаються у БЗ 6. На виходів БП 7 формується сигнал ідентифікації символу. Для виділення символів із всього спроектованого номерного знаку використовується спеціальне клітинне середовище, яке організоване таким чином, щоб в ньому було організоване вікно знакомісця. Таке віртуальне вікно повинно пересуватись по всьому полю номерного знаку і зупинятись у момент охоплення символу. Графічне пояснення способу виділення символу подано на фіг. 2. Спочатку проектується номерний знак на клітинний автомат (КА) (фіг. 2). Потім проводиться заповнення стовпчиків сигналами належності вікна охоплення символу (фіг. 2). Далі виділена область проектується на КА у БФКС 5, який здійснює подальшу обробку. Структурна схема БВС 4 подана на фіг. 3 містить генератор тактових імпульсів 9 (Г), двомірний регістр зсуву 10 (ДРЗ) та блок зберігання одиничного сигналу 11 (БЗОС), клітинний автомат 12 (КА). ДРЗ 10 та КА 12 реалізовані матричними однорідними клітинними структурами. Кожна з цих структур організована таким чином, що виконує задану операцію. ДРЗ 10 здійснює паралельний постовпчиковий зсув одиничних сигналів, як показано на фіг. 2. КА 12 зберігає записані символи та обробляє сигнали від клітин ДРЗ 10. Генератор тактових імпульсів 9 задає такти зсуву інформації у ДРЗ 10. Якщо у стовпчику КА 12 присутні клітини, що належать символу, то на відповідному виході формується одиничний сигнал (Ui=1), який підтримує БЗОС 11 у одиничному стані. Тобто UБВС=1. При цьому одиничний сигнал з'являється тільки один послідовно з кожним тактом. Часові діаграми формування сигналів, що пояснюють роботу схеми, подані на першому прикладі фіг. 4, де показано сигнали на виході Γ 9, а на наступних прикладах фіг. 4 - форми сигналів на виходах стовпчиків КА 12. Сигнал на виході БВС 4 (UБВС), який вказує межі символу, подано на останньому прикладі фіг. 4. Схема фрагменту КА 12 подана на фіг, 5, де ΚА 12 містить матрицю ПЕ 121 122,…,12n відповідно до заданої розмірності та диз'юнктори 131 132,…,13n, кількість яких характеризується кількістю стовпчиків КА 12. Входи кожного диз'юнктора підключені до виходів ПЕij, які належать відповідному стовпчику. Тобто кожний диз'юнктор 13 n об'єднує по входам виходи ПЕ12n відповідних стовпчиків. Вхід кожного ПЕij у КА 12 підключений до виходу відповідного ПЕij, який належить ДРЗ 10. Вихід кожного диз'юнктора 13n у КА 12 підключений до відповідного входу БЗОС 11. Принцип роботи КА 12 полягає у наступному. У початковий момент часу проводиться запис номерного знаку на КА 12. Кожний ПЕ 12n запам'ятовує елементарний дискрет зображення номерного знаку. Оскільки зображення бінаризоване, то ПЕ 12 n може знаходитись у двох станах. 1. ПЕ належить символу (логічна "1"). 2. ПЕ належить фону (логічний "0"). Якщо у стовпчику хоча б один ПЕ 12 n знаходиться у стані логічної "1", то на виході відповідного диз'юнктора 13n також присутня логічна "1". Отже диз'юнктори 13 n указують на належність ПЕ 12n відповідного зображенню символу. Якщо на виході відповідного диз'юнктора 13n присутній логічний "0", то це означає, що усі ПЕ 12 n даного стовпчика належать фону, тобто розташовані на межі між символами. Функціональна схема блока зберігання одиничного сигналу подана на фіг. 6. БЗОС 11 містить регістр зсуву 14 (РЗ), диз'юнктор 15 та елемент пам'яті 16 (ЕП), вихід якого є вихід БВС 4, а тактовий вхід підключений до виходу Г 9 та до входів синхронізації кожного розряду 14 n РЗ. Виходи розрядів РЗ підключені до входів диз'юнктора 15, вихід якого підключений до інформаційного входу ЕП 16. Крім того, вихід розряду 14 n підключений до інформаційного входу кожного наступного розряду 14n+1 та до входу обнуління кожного попереднього розряду 14 n-1. 2 UA 69958 U 5 10 15 20 25 30 35 Сигнали від диз'юнкторів КА 12 надходять на другі інформаційні входи відповідних розрядів 14 n РЗ. На їх входи синхронізації надходять тактові імпульси. З приходом першого тактового імпульсу 141 встановлюється у стан, який відповідає сигналу, що присутній на його другому інформаційному вході. Якщо 141 має одиничний стан, то з другим тактом у одиничний стан встановлюється 142, якщо на його другому інформаційному вході присутній сигнал логічної "1". При цьому 141 обнуляється. З приходом подальших імпульсів від Г 9 процеси повторюються. Таким чином, на виходах РЗ 14 у кожний тактовий момент часу присутні або тільки нульові сигнали, або сигнал логічної "1" тільки на одному з виходів. Якщо на одному з входів диз'юнктора 15 присутня логічна "1", то з його виходу сигнал логічної "1" подається на інформаційний вхід ЕП 16, який встановлюється у одиничний стан і підтримується в ньому до приходу сигналу логічного "0". Часові діаграми, що пояснюють роботу БЗОС 11, подані на фіг. 7. Сигнали Ui указують на сигнали на виходах стовпчиків КА 12, Ur відповідає сигналу на виході генератора Г 9. На часових діаграмах UPi указує на форму сигналу на виході і-го розряду (14i) РЗ 14, Uiн відповідає сигналу на виході диз'юнктора 15, a UБВС - на виході ЕП 16. Нульовий проміжок у формі сигналу UБВС указує на стовпчик (по номеру), який є межею між символами зображення номерного знаку. У даний часовий момент відбувається проектування зображення символу, охопленого одиницями ДРЗ 10 у БФКС 5 (фіг. 1). Обробка та розпізнавання виділеного символу здійснюється у БФКС 5. Від методу, закладеного у БФКС 5, та його структурної реалізації залежить достовірність функціонування блока та ідентифікації номерних знаків рухомих об'єктів залізничного транспорту. Кожний з цих символів можна ідентифікувати по одному або двом крайнім вертикальним та горизонтальним кодам, не визначаючи середину форми символу. Для реалізації такого алгоритму використовується клітинне однорідне середовище, яке здійснює зсуви значень країв символів в обидві сторони по горизонталі та вертикалі. Приклад реалізації методу подано на фіг. 8,а. Структурна схема БФКС 5 на основі фрагменту КА 12 подана на фіг. 9. Схема містить КА 12, верхній 17 (ВРг), нижній 18 (НРг), лівий 19 (ЛРг) та правий регістри 20 (ПРг) та блок формування кодової послідовності 21 (БФКП), входи якого підключені до виходів регістрів, входи яких підключені до виходів комірок, відповідно, крайніх стрічок та стовпчиків КА 12. Зображення символів записується у ΚΑ 12, в якому і відбувається зсув станів крайніх клітин символів на краї. Кожна клітка КА 12 виконує операції, які закладені в ній згідно з алгоритмом, поданим на фіг. 10. По заданому алгоритму відбувається запис зображення символу, перевіряється стан власної клітини та стан клітини сусідніх стрічок та стовпчиків. Аналіз сусідніх клітин визначає подальший стан клітини згідно з запропонованим методом. На фіг. 11 запропонована реалізація ПЕ 12n, який містить два диз'юнктори 22, 23 та тригер 24 (Т). Така схема дозволяє обчислити тільки крайні коди з повною руйнацією зображення символу. Приклад такого визначення крайніх кодів подано на наступному зображенні фіг. 8. Пристрій дозволяє ідентифікувати номерні знаки рухомих об'єктів з підвищеною швидкодією, а також дозволяє розпізнавати будь-які номери без спеціально необхідної форми і вимушеного маркування, що розширює область використання. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 Пристрій для ідентифікації номерних знаків рухомих об'єктів, що містить відеокамеру та блок розпізнавання, який містить блок попередньої підготовки зображення, блок порівняння та блок еталонів, який відрізняється тим, що в нього введений блок виділення символу, блок формування кодів символів, причому блок попередньої підготовки зображення входом підключений до входу блока розпізнавання, а виходом до входу блока виділення символів, вихід якого підключено до входу блока формування коду символів, вихід якого підключений до входу блока порівняння та до входу блока еталонів, причому вихід блока еталонів підключений до другого входу блока порівняння, вихід якого підключений до виходу блока розпізнавання. 3 UA 69958 U 4 UA 69958 U 5 UA 69958 U 6 UA 69958 U 7 UA 69958 U 8 UA 69958 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for identification of mobile object licence plates
Автори англійськоюStasiuk Oleksandr Ionovych, Bilan Stepan Mykolaiovych, Kalyniuk Iryna Oleksandrivna, Horeiko Serhii Mykolaiovych
Назва патенту російськоюУстройство идентификации номерных знаков движущихся объектов
Автори російськоюСтасюк Александр Инович, Билан Степан Николаевич, Калинюк Ирина Александровна, Горейко Сергей Николаевич
МПК / Мітки
МПК: G06K 9/00
Мітки: ідентифікації, знаків, рухомих, об'єктів, пристрій, номерних
Код посилання
<a href="https://ua.patents.su/11-69958-pristrijj-identifikaci-nomernikh-znakiv-rukhomikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій ідентифікації номерних знаків рухомих об’єктів</a>
Спосіб ідентифікації рухомих об’єктів
Номер патенту: 61493
Опубліковано: 25.07.2011
Автори: Білан Степан Миколайович, Моторнюк Руслан Леонідович
МПК: G06K 9/00
Мітки: ідентифікації, об'єктів, спосіб, рухомих
Формула / Реферат:
1. Спосіб ідентифікації рухомих об'єктів, згідно з яким формують вхідне оцифроване растрове зображення з обох боків об'єкта, виділяють кадр з відеопотоку, для видалення із зображення об'єкта малозначимих елементів зображення фільтрують, виділяють контури об'єкта, виділяють образ зображення, зчитування проводять з урахуванням напрямку руху, який відрізняється тим, що бінаризують зображення образу, розбивають на складові цифри та подають на...
Спосіб розпізнавання державних номерних знаків автотранспортних засобів
Номер патенту: 27856
Опубліковано: 12.11.2007
Автори: Михайловський Сергій Васильович, Окончук Володимир Іванович, Щучик Едуард Степанович, Люлевич Станіслав Валерійович, Кухтаров Сергій Андрійович
МПК: G08G 1/01, G08G 1/017
Мітки: спосіб, засобів, номерних, державних, знаків, розпізнавання, автотранспортних
Формула / Реферат:
1. Спосіб розпізнавання державних номерних знаків автотранспортних засобів, що включає зчитування державних номерних знаків автотранспортних засобів з контрольованої зони, пошук зчитаних державних номерних знаків автотранспортних засобів у базах даних, формування сигналу у разі збіжності державного номерного знака з записом у будь-якій з баз даних, формування бази даних зчитаних державних номерних знаків автотранспортних засобів, формування...
Спосіб ідентифікації рухомих об’єктів
Номер патенту: 82883
Опубліковано: 26.05.2008
Автори: Зайцев Вадим Сергійович, Золотько Юрій Сергійович
МПК: G06F 17/14, G06K 9/68, B61L 25/00
Мітки: ідентифікації, рухомих, спосіб, об'єктів
Формула / Реферат:
1. Спосіб ідентифікації рухомих об'єктів, згідно з яким формують вхідне оцифроване растрове зображення об'єкта, яке подають на блок прямого швидкого дискретного перетворення Фур'є, який відрізняється тим, що виділяють кадр з відеопотоку, для видалення із зображення об'єкта малозначимих елементів зображення фільтрують, виділяють контури об'єкта і контури маркування об'єкта, виділяють образ зображення, стиснене зображення образу подають на вхід...
Пристрій для ідентифікації об’єктів на конвеєрі
Номер патенту: 57067
Опубліковано: 10.02.2011
Автори: Калу Чидинма.Прешез, Лехціер Олег Леонідович, Лехціер Леонід Романович, Шариф Абубакар
Мітки: ідентифікації, конвеєрі, об'єктів, пристрій
Формула / Реферат:
Пристрій для ідентифікації об'єктів на конвеєрі, що містить блок створення растрової матриці зображення об'єкта, блок значень площі зображень еталонних об'єктів, блок порівняння розрахованої та еталонної площі зображень об'єкта та блок прийняття рішення про ідентифікацію, який відрізняється тим, що пристрій забезпечено блоком розрахунку середнього значення площі зображення об'єкта та блоком керування розрахунком площі зображення об'єкта,...
Пристрій для фільтрації зображення рухомих мікробіологічних об’єктів
Номер патенту: 61283
Опубліковано: 11.07.2011
Автори: Чалий Ігор Вільйович, Руденко Анатолій Петрович, Левкін Артур Володимирович, Путятін Валерій Петрович
МПК: A61D 19/04
Мітки: мікробіологічних, фільтрації, зображення, пристрій, об'єктів, рухомих
Формула / Реферат:
Пристрій для фільтрації зображення рухомих мікробіологічних об'єктів, який містить джерело освітлення зразка мікробіологічного матеріалу, який знаходиться у чашці Петрі з поживною речовиною, при цьому чашку Петрі конструктивно об'єднано з термостатом для підтримання рівномірної температури зразка, мікроскоп для збільшення зображення зразка, який об'єднано з телевізійним датчиком, блок реєстрації, який відрізняється тим, що вводять генератор...
Попередній патент: Пристрій для інтернет-мовлення
Наступний патент: Спосіб керування і контролю параметрів повітряного середовища приміщення
Випадковий патент: Спосіб лікування хворих на деструктивний туберкульоз легенів