Спосіб ідентифікації рухомих об’єктів
Номер патенту: 61493
Опубліковано: 25.07.2011
Автори: Моторнюк Руслан Леонідович, Білан Степан Миколайович

Формула / Реферат
1. Спосіб ідентифікації рухомих об'єктів, згідно з яким формують вхідне оцифроване растрове зображення з обох боків об'єкта, виділяють кадр з відеопотоку, для видалення із зображення об'єкта малозначимих елементів зображення фільтрують, виділяють контури об'єкта, виділяють образ зображення, зчитування проводять з урахуванням напрямку руху, який відрізняється тим, що бінаризують зображення образу, розбивають на складові цифри та подають на вхід клітинної системи розпізнавання з гексагональною мозаїкою, яка здійснює ідентифікацію об'єкта.
2. Спосіб за п. 1, який відрізняється тим, що виділяють бінаризоване зображення окремого символу маркування (цифри), подають бінаризоване зображення символу на однорідне клітинне середовище з гексагональним покриттям, підсумовують кількість елементів (пікселів) зображення символу в рядках по трьох напрямках гексагонального покриття, отримують три масиви - спектрограми розподілу зображення символу по трьох напрямках гексагонального покриття, передають три масиви - спектрограми розподілу зображення символу на блок порівняння з масивами - спектрограмами розподілу еталонного зображення, в блоці порівняння приводять відповідні масиви - спектрограми символу і масиви - спектрограми еталона до однакової довжини, для кожного еталона знаходять сумарну розбіжність відповідних масивів - спектрограм символу і еталона, серед отриманого масиву сумарних розбіжностей знаходять найменший елемент, по індексу знайденого найменшого елемента знаходять відповідний йому еталон, який дав найменшу сумарну розбіжність, якщо найменша сумарна розбіжність більша від певного порогового рівня, роблять висновок про невідповідність символу будь-якому еталону, якщо найменша сумарна розбіжність менша від певного порогового рівня, роблять висновок про відповідність символу еталону, який дав найменшу сумарну розбіжність.
Текст
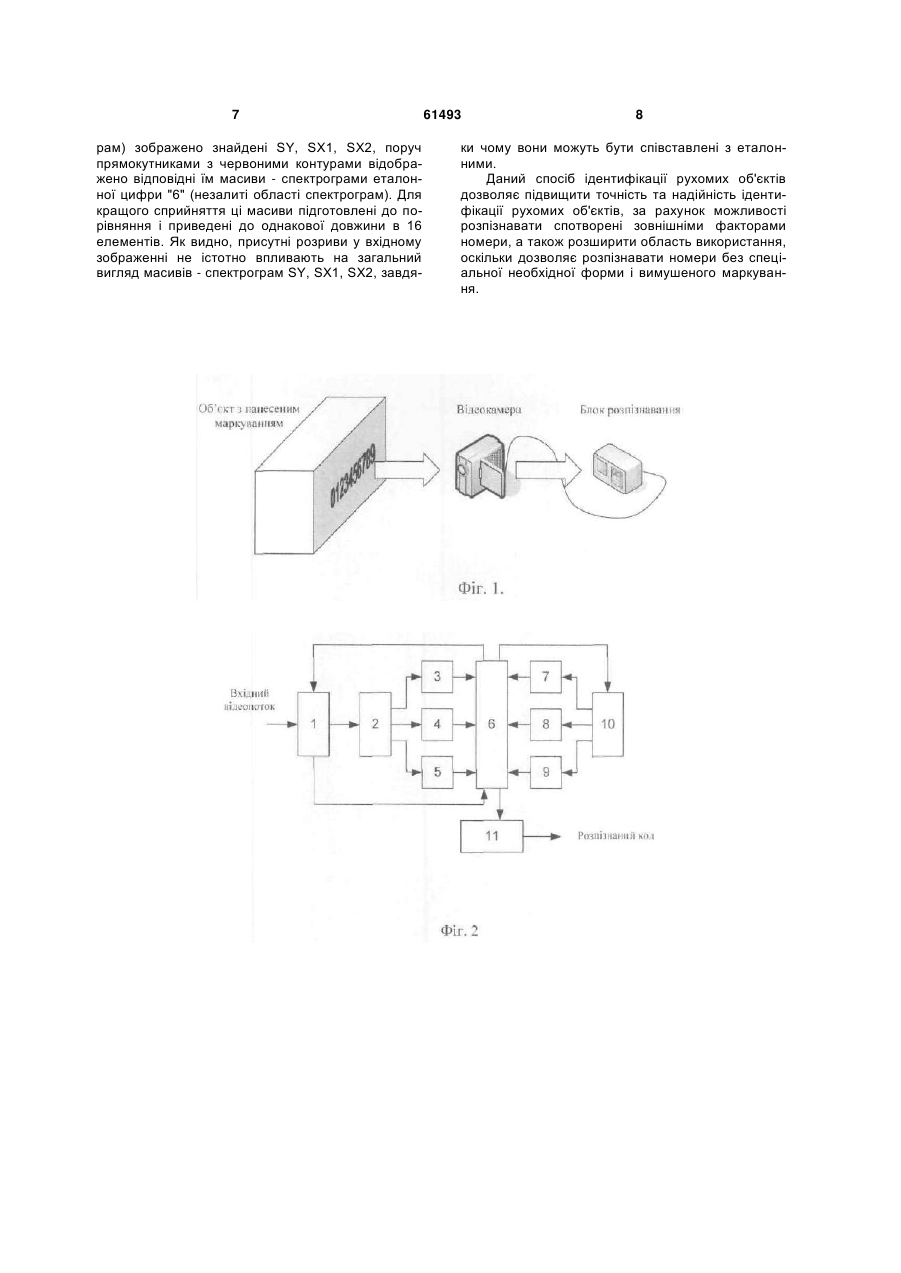
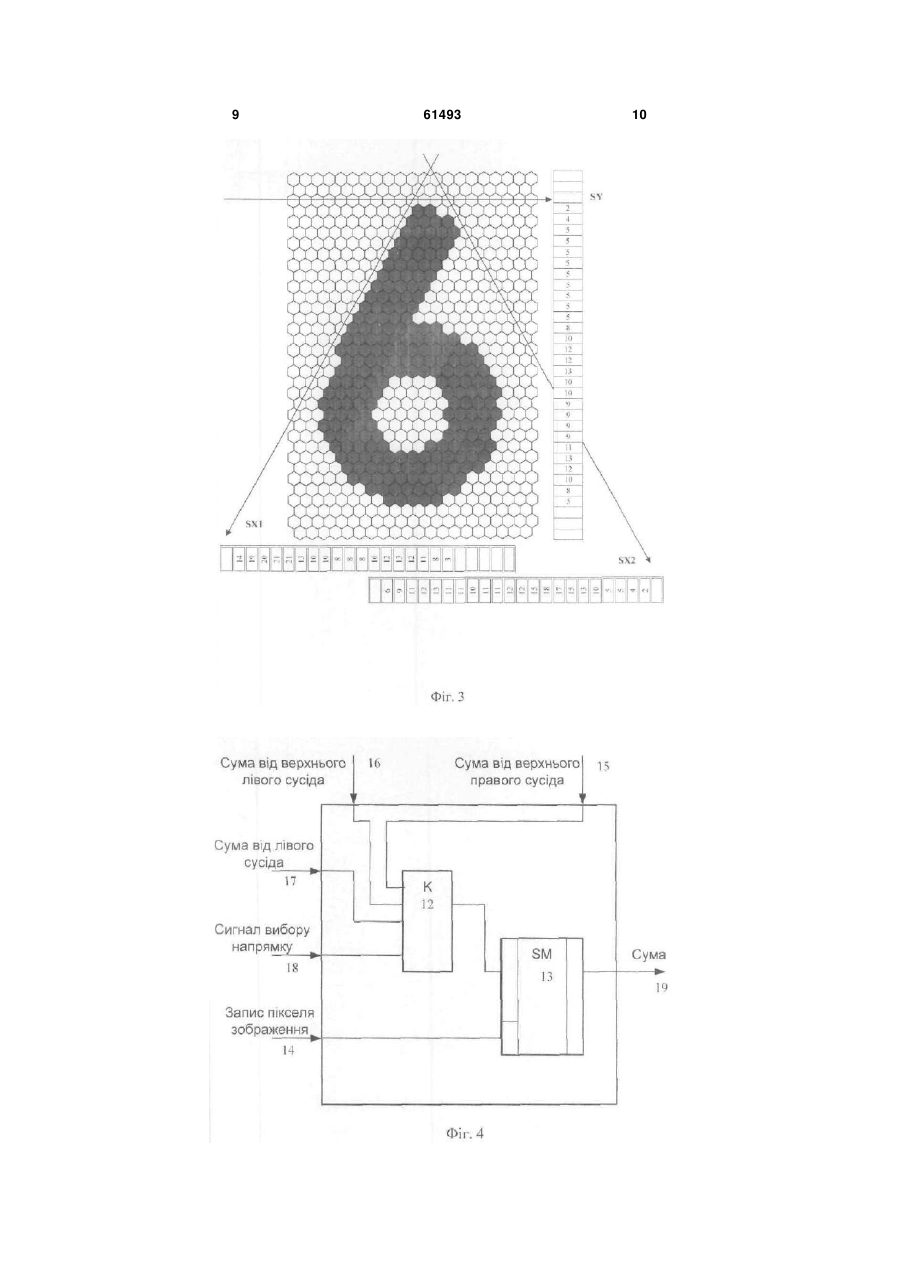
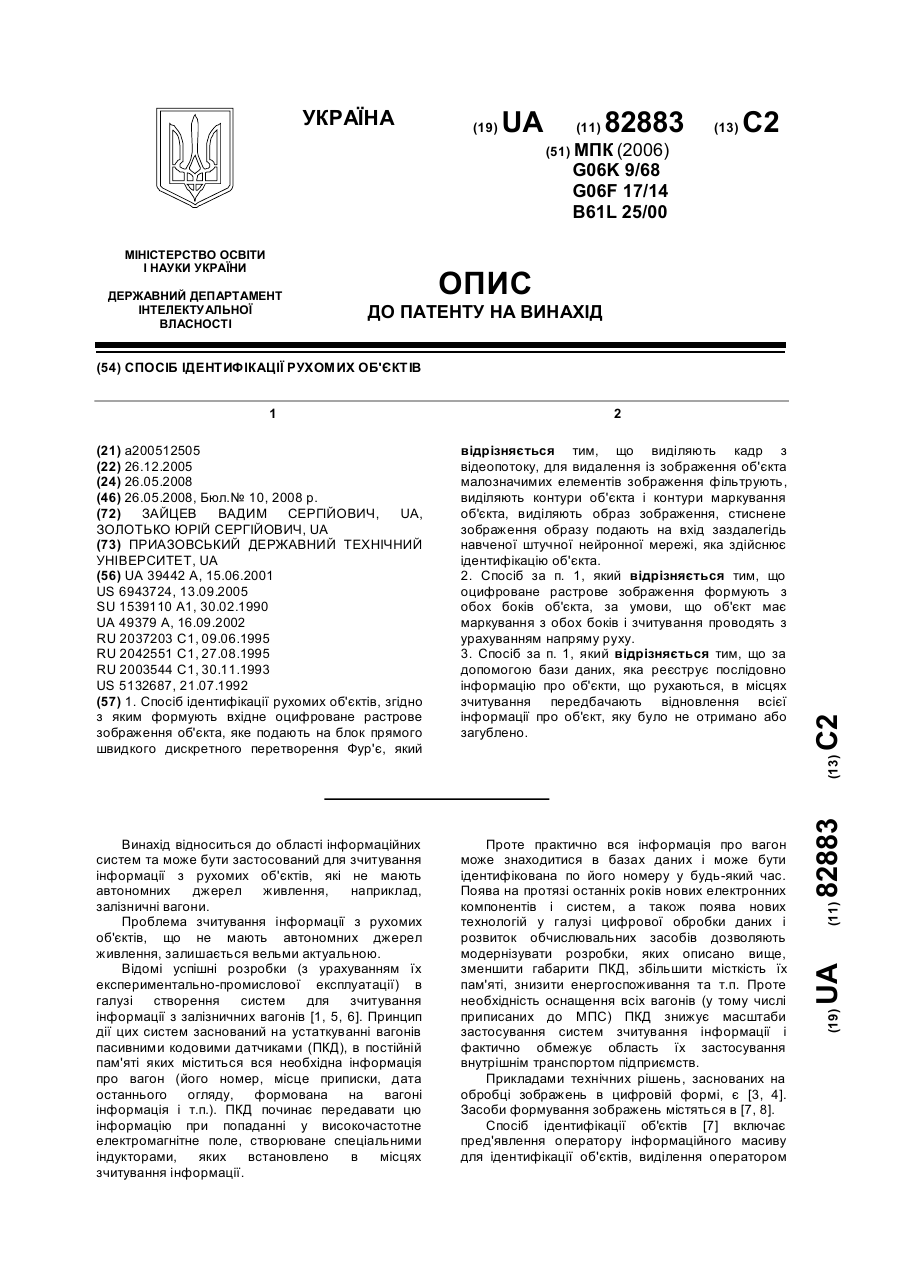
1. Спосіб ідентифікації рухомих об'єктів, згідно з яким формують вхідне оцифроване растрове зображення з обох боків об'єкта, виділяють кадр з відеопотоку, для видалення із зображення об'єкта малозначимих елементів зображення фільтрують, виділяють контури об'єкта, виділяють образ зображення, зчитування проводять з урахуванням напрямку руху, який відрізняється тим, що бінаризують зображення образу, розбивають на складові цифри та подають на вхід клітинної системи розпізнавання з гексагональною мозаїкою, яка здійснює ідентифікацію об'єкта. 2. Спосіб за п. 1, який відрізняється тим, що виділяють бінаризоване зображення окремого символу маркування (цифри), подають бінаризоване зображення символу на однорідне клітинне середовище з гексагональним покриттям, підсумову U 2 (19) 1 3 координат, отримані масиви через блок визначення модуля подають на корелятор, на виході отримують масиви взаємокореляційних функцій просторових спектрів вхідного і еталонних зображень, які подають на блок пошуку максимальних значень масивів взаємокореляційних функцій просторових спектрів вхідного і еталонних зображень, в якому номер елемента відповідає номеру еталонного значення, з яким порівнюють вхідне зображення, а значення елементів вектора відповідають максимальним значенням масивів взаємокореляційних функцій просторових спектрів вхідного і еталонних зображень, вектор максимальних значень масивів взаємокореляційних функцій подають на усереднювач, на виході якого отримують усереднену величину С, величину С і вектор максимальних значень масивів взаємокореляційних функцій подають на блок прийняття рішення, в якому визначають максимальний елемент вектора максимальних значень масивів взаємокореляційних функцій, порівнюють значення максимального елемента з величиною k°С (де k - повільна величина більша одиниці), якщо значення максимального елемента вектора максимальних значень масивів взаємокореляційних функцій більше величини k°С, судять про відповідність вхідного зображення еталонному зображенню з номером, який відповідає номеру максимального елемента у векторі максимальних значень масивів взаємокореляційних функцій, якщо значення максимального елемента вектора максимальних значень масивів взаємокореляційних функцій менше величини k°С, судять про невідповідність вхідного зображення будь-якому еталонному зображенню. Недоліком способу є практична неможливість визначення постійних значень взаємокореляційних функцій при необхідності ідентифікації рухомих об'єктів, так як вони мають змінний характер. Найбільш близьким за змістом є спосіб ідентифікації рухомих об'єктів (Патент України №82883. - Опубл. 2008 - Бюл. №10), згідно з яким формують вхідне оцифроване растрове зображення з обох боків об'єкта, за умови, що об'єкт має маркування з обох боків і зчитування проводять з урахуванням напрямку руху, виділяють кадр з відеопотоку, для видалення із зображення об'єкта малозначимих елементів зображення фільтрують, виділяють контури об'єкта і контури маркування об'єкта, виділяють образ зображення, стиснене зображення образу передають на вхід заздалегідь навченої штучної мережі, яка здійснює ідентифікацію об'єкта, за допомогою бази даних, яка реєструє послідовно інформацію про об'єкти, що рухаються, в місцях зчитування передбачають відновлення всієї інформації про об'єкт, яку було не отримано або загублено. Недоліком даного способу є те, що він потребує спеціального маркування і особливої форми символів, що знижує достовірність розпізнавання та звужує його область застосування, оскільки він може бути використаний лише для тих об'єктів, на яких є відповідне маркування, нанесене розробниками системи, крім того, необхідно з'єднання в єдину мережу всіх пунктів ідентифікації, для підт 61493 4 римання накопичуваної бази даних в актуальному стані. В основу корисної моделі поставлена задача підвищення достовірності ідентифікації, підвищення надійності та розширення області застосування за рахунок можливості розпізнавання цифрових знаків, які мають розриви контурів при використанні трафаретних шрифтів, та спотворення контурів в результаті дії навколишнього середовища. Поставлена задача вирішується тим, що спосіб ідентифікації рухомих об'єктів, який полягає в тому, що формують вхідне оцифровано растрове зображення з обох боків об'єкта, виділяють кадр з відеопотоку, для видалення із зображення об'єкта малозначимих елементів зображення фільтрують, виділяють контури об'єкта, виділяють образ зображення, зчитування проводять з урахуванням напрямку руху, а також зображення образу бінаризують, розбивають на складові цифри та подають на вхід клітинної системи розпізнавання з гексагональною мозаїкою, яка здійснює ідентифікацію об'єкта, виділяють бінаризоване зображення окремого символу маркування (цифри), подають бінаризоване зображення символу на однорідне клітинне середовище з гексагональним покриттям, підсумовують кількість елементів (пікселів) зображення символу в рядках по трьох напрямках гексагонального покриття, отримують три масивиспектрограми розподілу зображення символу по трьох напрямках гексагонального покриття, передають три масиви - спектрограми розподілу зображення символу на блок порівняння з масивами-спектрограмами розподілу еталонного зображення, в блоці порівняння приводять відповідні масиви - спектрограми символу і масиви спектрограми еталона до однакової довжини, для кожного еталона знаходять сумарну розбіжність відповідних масивів - спектрограм символу і еталона, серед отриманого масиву сумарних розбіжностей знаходять найменший елемент, по індексу знайденого найменшого елемента знаходять відповідний йому еталон, який дав найменшу сумарну розбіжність, якщо найменша сумарна розбіжність більша від певного порогового рівня, роблять висновок про невідповідність символу будь-якому еталону, якщо найменша сумарна розбіжність менша від певного порогового рівня, роблять висновок про відповідність символу еталону, який дав найменшу сумарну розбіжність. На фіг.1 представлено загальну структуру системи ідентифікації рухомих об'єктів, що пояснює спосіб, на фіг.2 - структурну схему блока розпізнавання, на фіг.3 - приклад формування масивів спектрограм в однорідному клітинному середовищі з гексагональним покриттям, на фіг.4 - функціональна схема процесорного елемента (ПЕ) однорідного клітинного середовища, на фіг.5 - приклад зафіксованого кадру маркування вагона з цифрою "6" та її бінаризоване зображення, на фіг.6 - графічне зображення масивів - спектрограм цифри "6" з фіг.5 (залита область спектрограми) та масивівспектрограм еталонної цифри "6" (зображено незалитими прямокутниками з контурами). Структурна схема блока розпізнавання (фіг.2) містить блок: 1 попередньої підготовки зображен 5 ня (БППЗ), однорідне клітинне середовище 2 з гексагональним покриттям (ОКССП), регістри 3-5 масивів - спектрограм SY, SX1,SX2 (PMCSY, PMCSX1, PMCSX2), відповідно, блок 6 порівняння та прийняття рішень (БППР), регістри 7-9 масивів спектрограм SY, SX1, SX2 еталонних символів (PMCSYE, PMCSX1E, PMCSX2E), відповідно, блок 10 еталонів (БЕ) та накопичуючий регістр 11 (HP), вхід якого підключений до виходу БППР 6, керуючі виходи якого підключені, відповідно, до керуючих входів БППЗ 1 та БЕ 10. Вихід БППЗ 1 підключений до входу ОКССП 2, виходи якого, відповідно, підключені до входів PMCSY 3, PMCSX1 4, PMCSX2 5, керуючий вихід БППЗ 1 підключений до керуючого входу БППР 6. Виходи PMCSY 3,PMCSX1 4, PMCSX2 5, PMCSYE 7, PMCSX1E 8,PMCSX2E 9 підключені до відповідних входів БППР 6, а виходи БЕ 10 - до входів відповідних PMCSYE 7, PMCSX1Е 8 та PMCSX2E 9. Схема процесорного елемента (ПЕ) однорідного клітинного середовища (фіг.4) містить комутатор 12 (K) та суматор 13 (SM), перший вхід якого підключений до виходу К 12, а другий - до входу запису піксела зображення 14. Перший, другий, третій та четвертий входи К 12, підключені, відповідно, до входу 15 суми від верхнього правого сусіда, входу 15 суми від верхнього лівого сусіда, входу 17 суми від лівого сусіда та входу 18 сигналу вибору напрямку, а вихід суматора 13 - до виходу 19 ПЕ. Суть корисної моделі полягає в наступному. Об'єкт з нанесеним маркуванням рухається повз встановлену і певним чином налаштовану відеокамеру, відеозображення з якої подається на пристрій розпізнавання (фіг.1). На вхід пристрою розпізнавання подається відеопотік, з якого проводиться фіксація кадру зображення, фільтрація отриманого зображення від завад та малозначимих елементів, визначення та виділення зображення маркування, бінаризація зображення маркування, розбиття зображення маркування на складові цифри, що відбувається у БППЗ 1 (фіг.2). Далі бінаризоване зображення першої цифри подається на однорідне клітинне середовище з гексагональним покриттям ОКСГП 2. Клітинна структура проводить підсумовування значущих пікселів зображення в рядках по трьох напрямках, які можна виділити в гексагональній мозаїці (фіг.3). На виході клітинного середовища отримуємо три масиви - спектрограми SY, SX1, SX2 (фіг.3), які заносяться у відповідні регістри PMCSY 3, PMCSX1 4, PMCSX2 5, (фіг.2). Еталонні значення всіх символів (цифр), які потрібно розпізнавати, зберігаються в спеціальній бібліотеці БЕ 10 (фіг.2). Блок порівняння та прийняття рішень БППР 6 (фіг.2), при отриманні обчислених масивів - спектрограм вхідного зображення SY, SX1, SX2 з регістрів 3, 4, 5 подає команду - запит до бібліотеки еталонів БЕ 10 (фіг.2) на отримання відповідних масивів - спектрограм першого еталонного символу, які заносяться у відповідні регістри масивів спектрограм еталонних символів PMCSYE 7, PMCSX1E 8, PMCSX2Е 9 (фіг.2). Блок 10 порівняння та прийняття рішень сні вставляє значення масивів у регістрах 3 та 7, 4 та 8, 5 та 9, при необ 61493 6 хідності проводить приведення їх до однакової довжини та масштабування, після чого підраховує сумарну розбіжність між масивами - спектрограмами вхідного зображення та еталонного. Результат запам'ятовується в масиві сумарних розбіжностей під індексом 1 (оскільки це було порівняння з першим еталонним символом). Після цього блок 10 порівняння та прийняття рішень подає команду - запит до бібліотеки еталонів на отримання масивів - спектрограм наступного еталонного символу, результат порівняння заноситься у масив сумарних розбіжностей; і так до тих пір, поки не буде проведено порівняння з усіма еталонними символами. В отриманому масиві сумарних розбіжностей проводиться пошук найменшого елемента. Відповідний йому індекс і буде порядковим номером еталону в бібліотеці еталонів БЕ 10. Якщо цей найменший елемент більший від певного порогового рівня, БППР 10 робить висновок про невідповідність вхідного зображення жодному еталонному, в іншому випадку робиться висновок про успішне розпізнавання вхідного зображення. Знайдений результат заноситься в накопичувальний регістр HP11 (фіг.2), в якому порозрядно буде формуватись розпізнаний код маркування. Після цього БППР 10 подає команду БППЗ 1 для виділення і передачі бінаризованого зображення наступного символу маркування на однорідне клітинне середовище, після чого відбувається процес розпізнавання наступного символу. З передачею останньої цифри маркування, блок 1 формує сигнал на БППР 10 про передачу всіх символів. Після отримання такого сигналу блок порівняння та прийняття рішень передає останній розпізнаний символ в вихідний регістр 11, в якому вже остаточно сформується розпізнаний код маркування. Однорідна клітинна структура складається з однотипових процесорних елементів. Процесорний елемент може мати наступну будову (фіг.4). Він має один вхід для запису пікселя зображення, якому відповідає даний ПЕ, три входи від сум, які накопичили верхній лівий, верхній правий і лівий сусідні ПЕ, вхід 18 керуючого сигналу для вибору напрямку підсумовування (тобто вибору формування масивів - спектрів SY, SX1, SX2). Підсумовування розпочинається з крайніх ПЕ, які лежать на межі процесорного середовища, причому для визначення SY це крайні ліві ПЕ, для визначення SX1 - крайні верхні і крайні праві ПЕ, SX2 - крайні верхні і крайні ліві ПЕ. В залежності від сигналу вибору напрямку комутатор К 12 передасть потрібну накопичену суму на суматор SM13, який виконає додавання в молодший розряд суми значення поточного піксела даного ПЕ. Таким чином результуючі масиви - спектри будуть сформовані на виходах крайніх ПЕ, причому SY буде на крайніх правих ПЕ, SX1 на крайніх лівих і крайніх нижніх ПЕ, SX2 - на крайніх правих і крайніх нижніх ПЕ. На фіг.5 показано приклад зафіксованого кадру маркування вагона з цифрою "6" та її бінаризоване зображення, які мають розриви в контурі. Результат моделювання роботи клітинного середовища по обчисленні масивів - спектрограм для даної цифри "6" у графічному вигляді подано на фіг.6. Зеленим кольором (залиті області спектрог 7 рам) зображено знайдені SY, SX1, SX2, поруч прямокутниками з червоними контурами відображено відповідні їм масиви - спектрограми еталонної цифри "6" (незалиті області спектрограм). Для кращого сприйняття ці масиви підготовлені до порівняння і приведені до однакової довжини в 16 елементів. Як видно, присутні розриви у вхідному зображенні не істотно впливають на загальний вигляд масивів - спектрограм SY, SX1, SX2, завдя 61493 8 ки чому вони можуть бути співставлені з еталонними. Даний спосіб ідентифікації рухомих об'єктів дозволяє підвищити точність та надійність ідентифікації рухомих об'єктів, за рахунок можливості розпізнавати спотворені зовнішніми факторами номери, а також розширити область використання, оскільки дозволяє розпізнавати номери без спеціальної необхідної форми і вимушеного маркування. 9 61493 10 11 Комп’ютерна верстка М. Ломалова 61493 Підписне 12 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюIdentification method for moving objects
Автори англійськоюBilan Stepan Mykolaiovych, Motorniuk Ruslan Leonidovych
Назва патенту російськоюСпособ идентификации движущихся объектов
Автори російськоюБилан Степан Николаевич, Моторнюк Руслан Леонидович
МПК / Мітки
МПК: G06K 9/00
Мітки: рухомих, об'єктів, ідентифікації, спосіб
Код посилання
<a href="https://ua.patents.su/6-61493-sposib-identifikaci-rukhomikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб ідентифікації рухомих об’єктів</a>
Спосіб ідентифікації рухомих об’єктів
Номер патенту: 82883
Опубліковано: 26.05.2008
Автори: Зайцев Вадим Сергійович, Золотько Юрій Сергійович
МПК: G06F 17/14, G06K 9/68, B61L 25/00
Мітки: ідентифікації, об'єктів, спосіб, рухомих
Формула / Реферат:
1. Спосіб ідентифікації рухомих об'єктів, згідно з яким формують вхідне оцифроване растрове зображення об'єкта, яке подають на блок прямого швидкого дискретного перетворення Фур'є, який відрізняється тим, що виділяють кадр з відеопотоку, для видалення із зображення об'єкта малозначимих елементів зображення фільтрують, виділяють контури об'єкта і контури маркування об'єкта, виділяють образ зображення, стиснене зображення образу подають на вхід...
Система визначення місцеположення і ідентифікації рухомих об’єктів, обладнаних радіодатчиком
Номер патенту: 20426
Опубліковано: 15.07.1997
Автори: Гудзюк Василь Петрович, Литвиненко Валентин Іванович, Баскаков Юрій Георгійович, Лігінов Сергій Михайлович, Сирма Олексій Олексійович, Грішін Леонід Андрійович, Мальцев Вадим Олександрович, Мєдвєдєв Сергій Леонідович, Муратов Олександр Олексійович
Мітки: місцеположення, система, об'єктів, обладнаних, ідентифікації, визначення, радіодатчиком, рухомих
Формула / Реферат:
Система определения местоположения и идентификации подвижных объектов, оборудованных радиодатчиком, содержащая N пространственно разнесенных постов пеленгования с известными координатами, причем N больше или равно 3, и центральный пост с известными координатами, причем каждый радиодатчик подвижных объектов включает датчик дверей, вибродатчик, выходы которых подключены к входам устройства сопряжения, устроиство управления, один вход...
Спосіб ідентифікації об’єктів на конвеєрі
Номер патенту: 56781
Опубліковано: 25.01.2011
Автори: Лехціер Леонід Романович, Калу Чидинма.Прешез, Шариф Абубакар, Лехціер Олег Леонідович
МПК: G06K 9/00
Мітки: об'єктів, конвеєрі, ідентифікації, спосіб
Формула / Реферат:
Спосіб ідентифікації об'єктів на конвеєрі, у якому по матриці зображення об'єкта визначають площу об'єкта як суму усіх значимих елементів матриці, після чого порівнюють цю площу з площею зображення еталонного об'єкта і ідентифікують розпізнаваний геометричний об'єкт за критерієм близькості, який відрізняється тим, що результуюче значення площі зображення об'єкта визначають як середнє значення ряду вимірювань площ, які здійснюють у процесі...
Пристрій для ідентифікації об’єктів на конвеєрі
Номер патенту: 57067
Опубліковано: 10.02.2011
Автори: Лехціер Олег Леонідович, Шариф Абубакар, Лехціер Леонід Романович, Калу Чидинма.Прешез
Мітки: об'єктів, ідентифікації, конвеєрі, пристрій
Формула / Реферат:
Пристрій для ідентифікації об'єктів на конвеєрі, що містить блок створення растрової матриці зображення об'єкта, блок значень площі зображень еталонних об'єктів, блок порівняння розрахованої та еталонної площі зображень об'єкта та блок прийняття рішення про ідентифікацію, який відрізняється тим, що пристрій забезпечено блоком розрахунку середнього значення площі зображення об'єкта та блоком керування розрахунком площі зображення об'єкта,...
Система керування груповою поведінкою рухомих об’єктів
Номер патенту: 60351
Опубліковано: 10.06.2011
Автори: Тищенко Максим Георгійович, Кравченко Юрій Васильович, Савченко Віталій Анатолійович, Пермяков Олександр Юрійович, Машталір Вадим Віталійович
МПК: G01S 5/02
Мітки: система, керування, рухомих, груповою, об'єктів, поведінкою
Формула / Реферат:
Система керування груповою поведінкою рухомих об'єктів, яка містить комплект приладів прийому та обробки радіонавігаційних сигналів від супутникових радіонавігаційних систем, блок обробки координат та блок керування, при цьому система керування груповою поведінкою рухомих об'єктів розміщується на рухомих об'єктах, яка відрізняється тим, що зазначена система додатково містить пристрій для обміну інформацією з іншими рухомими об'єктами та блок...
Попередній патент: Циклонний пиловловлювач
Наступний патент: Ківш скрепера
Випадковий патент: Спосіб лікування есенціальної гіпертензії