Безплатформна інерціальна навігаційна система
Номер патенту: 47328
Опубліковано: 25.01.2010
Автори: Давидов Дмитро Володимирович, Федорчук Ігор Володимирович, До Куок Туан, Златкін Олег Юрійович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович

Формула / Реферат
Безплатформна інерціальна навігаційна система, що складається з трьох датчиків кутових швидкостей та трьох акселерометрів, яка відрізняється тим, що в неї додатково введені два датчики кутової швидкості, чутливі осі перших двох датчиків кутових швидкостей співпадають з двома осями ортогональної системи координат, вісь третього датчика кутової швидкості направлена під кутом по відношенню до третьої ортогональної осі, осі четвертого та п'ятого датчиків кутових швидкостей направлені з початку координат по діагоналі куба в 2 та 4 октанти відповідно, а також два акселерометри, чутливі осі перших двох акселерометрів співпадають з двома осями ортогональної системи координат, вісь третього акселерометра направлена під кутом по відношенню до третьої ортогональної осі, осі четвертого та п'ятого акселерометрів направлені з початку координат по діагоналі куба в 2 та 4 октанти відповідно, виходи датчиків кутових швидкостей та акселерометрів послідовно через аналого-цифровий перетворювач, блок діагностування підключені до блока формування кутових швидкостей та уявлених прискорень.
Текст
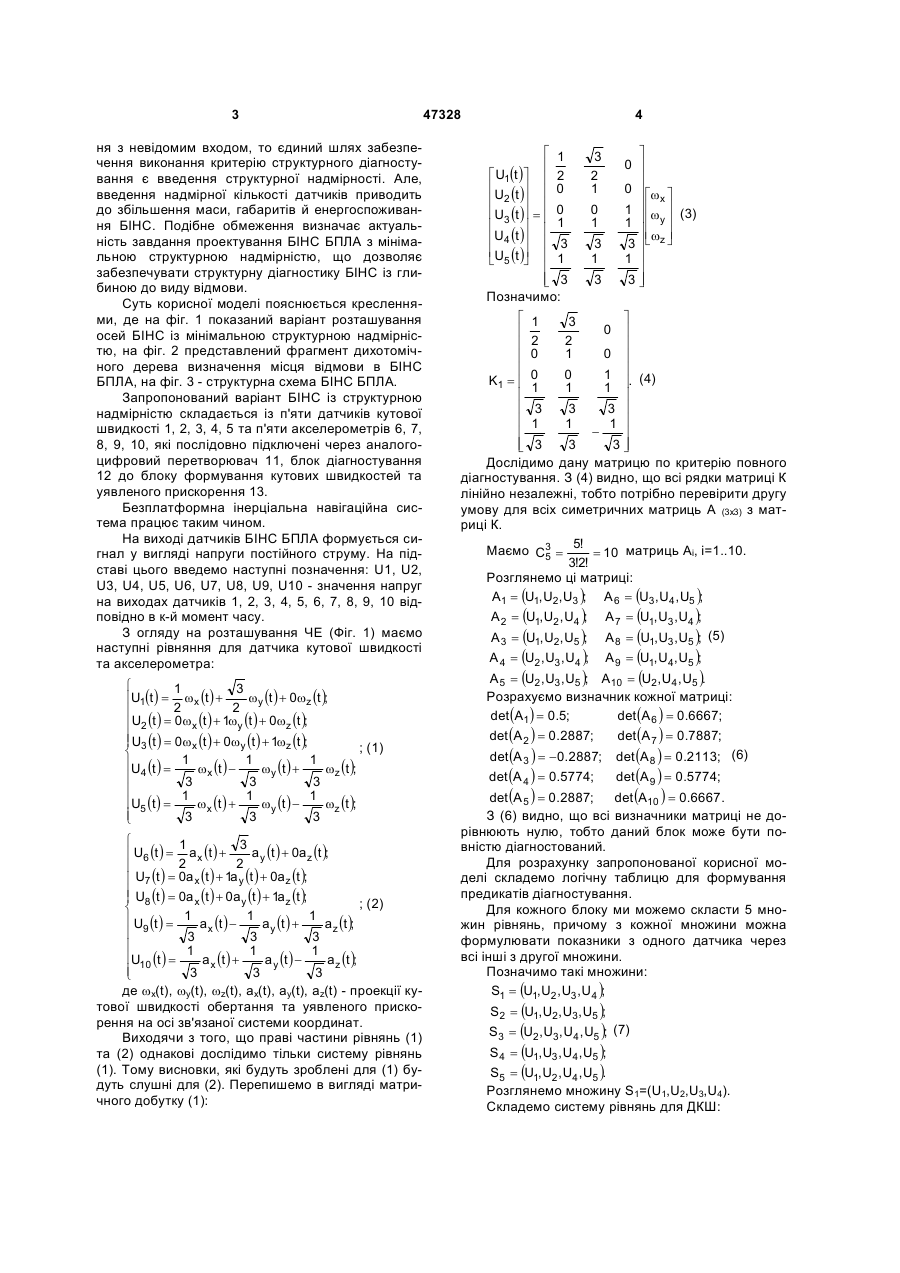
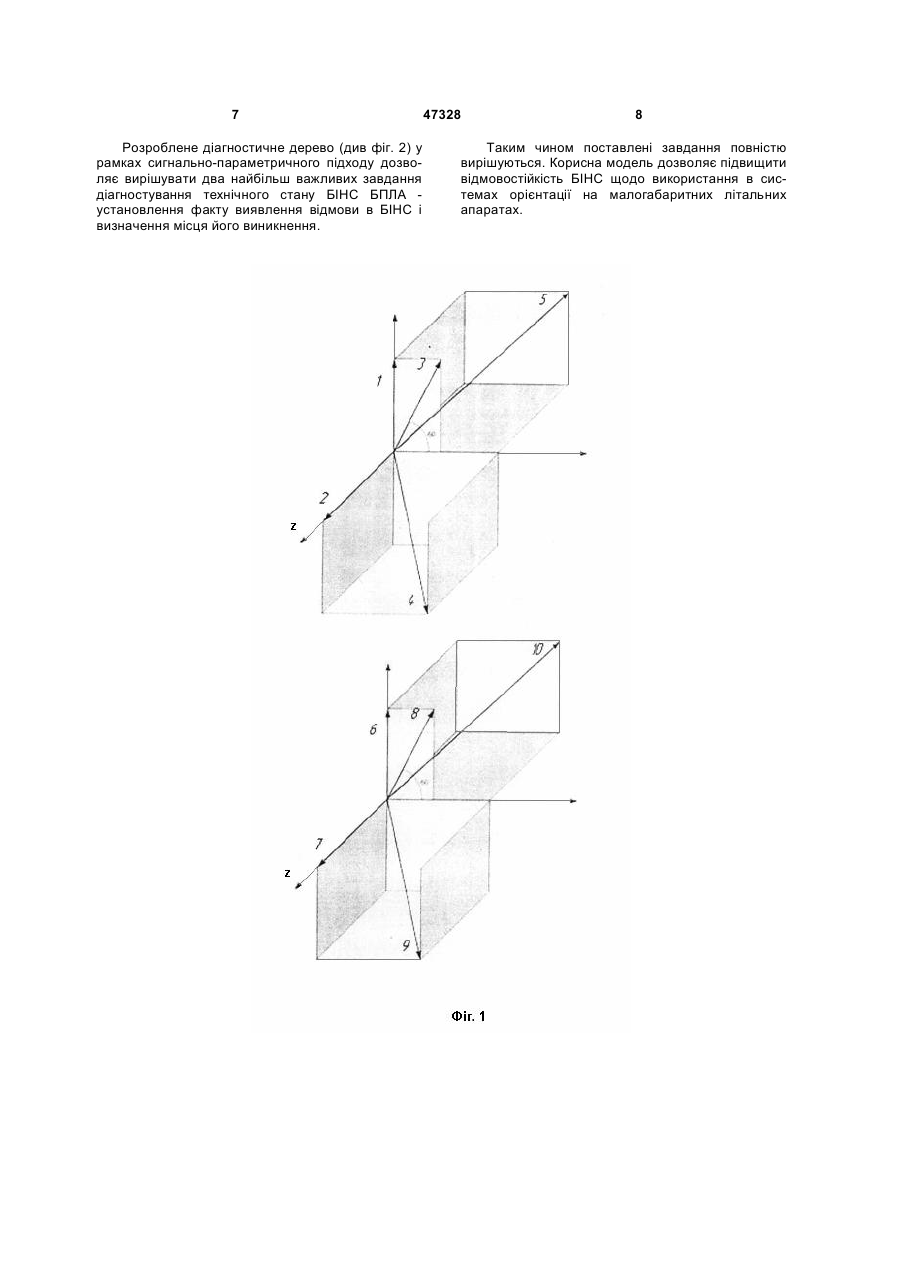
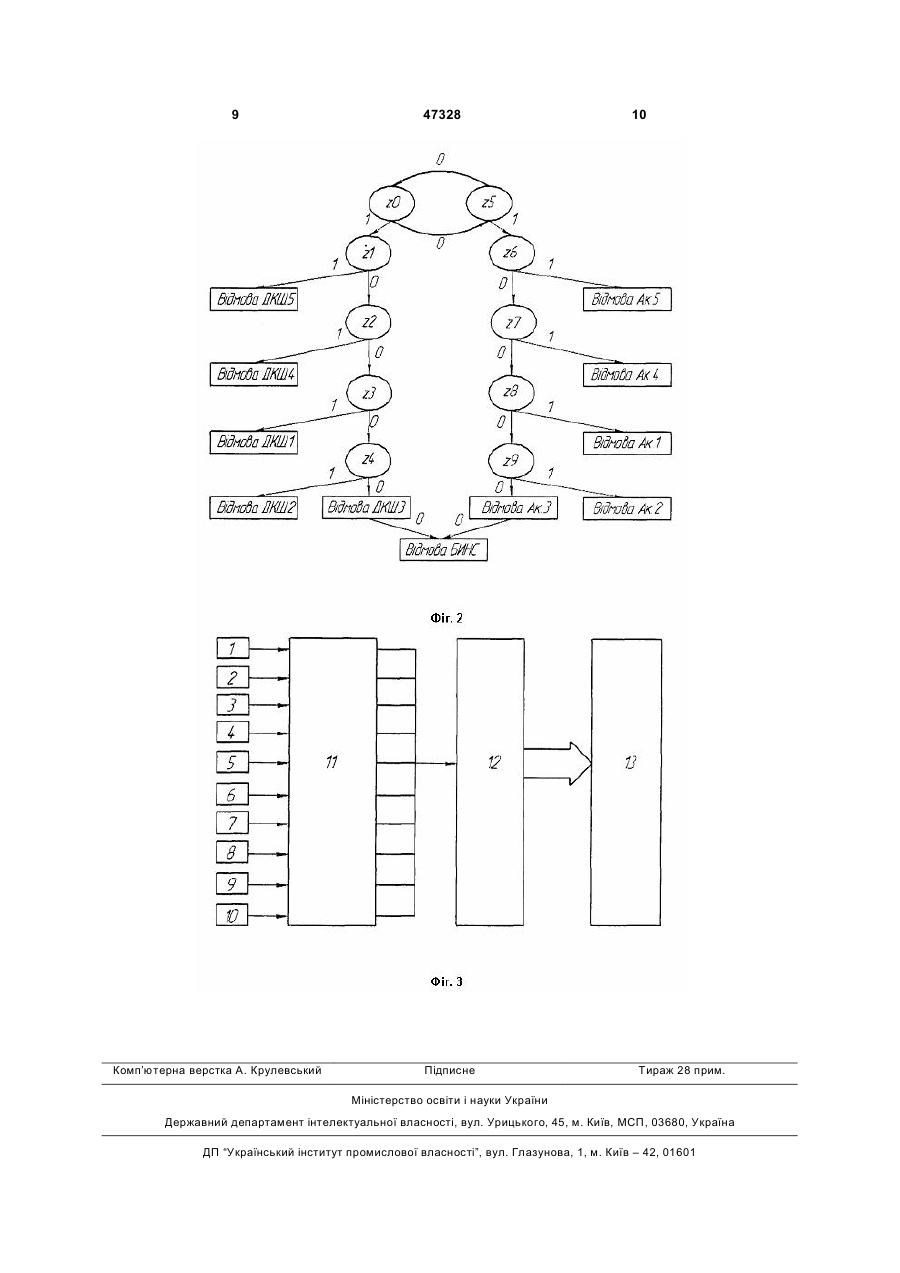
Безплатформна інерціальна навігаційна система, що складається з трьох датчиків кутових швидкостей та трьох акселерометрів, яка відрізняється тим, що в неї додатково введені два датчики кутової швидкості, чутливі осі перших двох датчиків кутових швидкостей співпадають з двома 3 ня з невідомим входом, то єдиний шлях забезпечення виконання критерію структурного діагностування є введення структурної надмірності. Але, введення надмірної кількості датчиків приводить до збільшення маси, габаритів й енергоспоживання БІНС. Подібне обмеження визначає актуальність завдання проектування БІНС БПЛА з мінімальною структурною надмірністю, що дозволяє забезпечувати структурну діагностику БІНС із глибиною до виду відмови. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 показаний варіант розташування осей БІНС із мінімальною структурною надмірністю, на фіг. 2 представлений фрагмент дихотомічного дерева визначення місця відмови в БІНС БПЛА, на фіг. 3 - структурна схема БІНС БПЛА. Запропонований варіант БІНС із структурною надмірністю складається із п'яти датчиків кутової швидкості 1, 2, 3, 4, 5 та п'яти акселерометрів 6, 7, 8, 9, 10, які послідовно підключені через аналогоцифровий перетворювач 11, блок діагностування 12 до блоку формування кутових швидкостей та уявленого прискорення 13. Безплатформна інерціальна навігаційна система працює таким чином. На виході датчиків БІНС БПЛА формується сигнал у вигляді напруги постійного струму. На підставі цього введемо наступні позначення: U1, U2, U3, U4, U5, U6, U7, U8, U9, U10 - значення напруг на виходах датчиків 1, 2, 3, 4, 5, 6, 7, 8, 9, 10 відповідно в к-й момент часу. З огляду на розташування ЧЕ (Фіг. 1) маємо наступні рівняння для датчика кутової швидкості та акселерометра: ì 1 3 wy (t ) + 0wz (t ); ïU1(t ) = wx (t ) + 2 2 ï U2 (t ) = 0wx (t ) + 1wy (t ) + 0wz (t ); ï ïU (t ) = 0w (t ) + 0w (t ) + 1w (t ); ï 3 x y z ; (1) í 1 1 1 ïU (t ) = wx (t ) wy (t ) + wz (t ); ï 4 3 3 3 ï 1 1 1 ïU5 (t ) = wx (t ) + wy (t ) wz (t ); ï 3 3 3 î ì 1 3 a y (t ) + 0a z (t ); ï U6 (t ) = a x (t ) + 2 2 ï ï U7 (t ) = 0a x (t ) + 1a y (t ) + 0a z (t ); ï U (t ) = 0a (t ) + 0a (t ) + 1a (t ); ï 8 x y z ; (2) í 1 1 1 ï U (t ) = a x (t ) a y (t ) + a z (t ); ï 9 3 3 3 ï 1 1 1 ïU10 (t ) = a x (t ) + a y (t ) a z (t ); ï 3 3 3 î де wx(t), wy(t), wz(t), ax(t), ay(t), az(t) - проекції кутової швидкості обертання та уявленого прискорення на осі зв'язаної системи координат. Виходячи з того, що праві частини рівнянь (1) та (2) однакові дослідимо тільки систему рівнянь (1). Тому висновки, які будуть зроблені для (1) будуть слушні для (2). Перепишемо в вигляді матричного добутку (1): 47328 4 é 1 ê é U1(t )ù ê 2 ú ê 0 ê êU2 (t )ú ê êU3 (t )ú = ê 0 ú ê 1 ê êU4 (t )ú ê 3 êU (t )ú ê 1 ë 5 û ê ê 3 ë Позначимо: ù 0 ú ú 0 ú éw ù x 1 ú êw ú (3) úê y ú 1 ú êw ú 3 úë z û 1 ú ú 3ú û 3 2 1 0 1 3 1 3 é 1 ù 3 0 ú ê 2 ê 2 ú 1 0 ú ê 0 ê 0 1 ú. (4) K1 = ê 0 1 1 1 ú ê ú ê 3 3 3 ú ê 1 1 1 ú ê ú ê 3 3 3ú ë û Дослідимо дану матрицю по критерію повного діагностування. З (4) видно, що всі рядки матриці К лінійно незалежні, тобто потрібно перевірити другу умову для всіх симетричних матриць А (3х3) з матриці К. Маємо C3 = 5! = 10 матриць Аі, і=1..10. 5 3!2! Розглянемо ці матриці: A1 = (U1, U2, U3 ); A 6 = (U3, U4 , U5 ); A 2 = (U1, U2 , U4 ); A 7 = (U1, U3 , U4 ); A 3 = (U1, U2, U5 ); A 8 = (U1, U3 , U5 ); (5) A 4 = (U2 , U3 , U4 ); A 5 = (U2 , U3 , U5 ); A 9 = (U1, U4, U5 ); A10 = (U2, U4 , U5 ). Розрахуємо визначник кожної матриці: det (A1) = 0.5; det (A 6 ) = 0.6667; det (A 2 ) = 0.2887; det (A 7 ) = 0.7887; det (A 3 ) = -0.2887; det (A 8 ) = 0.2113; (6) det (A 4 ) = 0.5774; det (A 9 ) = 0.5774; det (A 5 ) = 0.2887; det (A10 ) = 0.6667. З (6) видно, що всі визначники матриці не дорівнюють нулю, тобто даний блок може бути повністю діагностований. Для розрахунку запропонованої корисної моделі складемо логічну таблицю для формування предикатів діагностування. Для кожного блоку ми можемо скласти 5 множин рівнянь, причому з кожної множини можна формулювати показники з одного датчика через всі інші з другої множини. Позначимо такі множини: S1 = (U1, U2 , U3 , U4 ); S2 = (U1, U2, U3, U5 ); S3 = (U2, U3, U4 , U5 ); (7) S4 = (U1, U3 , U4, U5 ); S5 = (U1, U2 , U4 , U5 ). Розглянемо множину S1=(U1,U2,U3,U4). Складемо систему рівнянь для ДКШ: 5 47328 6 U4 (t ) = [2U (t) 3 3U2 ( ( ) ) [ ì 1 3 wy (t ) + 0wz (t ); ïU1(t ) = wx (t ) + 2 2 ï U2 (t ) = 0wx (t ) + 1wy (t ) + 0wz (t ); ï (8) í ïU3 (t ) = 0wx (t ) + 0wy (t ) + 1wz (t ); ï 1 1 1 wx (t ) wy (t ) + wz (t ). ïU4 (t ) = 3 3 3 î З системи рівнянь (8) маємо: ( ) 1 або: 1 ] 1 3 U2 (t ) + 1 3 wzU3 (t ); (10) 1 3U4 (t ) + 3 + 1 U2 (t ) - U3 (t ). (11) 2 З (11) можна позначити як оцінне значення по датчику 1, тобто: 1 ~ ~ ~ ~ U1(t ) = 3U4 (t ) + 3 + 1 U2 (t ) - U3 (t ) . (12) 2 Значить якщо всі датчики справні, то: U1(t ) = ] ì wx (t ) = 2U1(t ) - 3U2 ; ï ï wy (t ) = U2 (t ); ï (9) í wz (t ) = U3 (t ); ï 1 1 1 ïU4 (t ) = wx (t ) wy (t ) + wz (t ). ï 3 3 3 î З (9) випливає: ~ ~ 1 ~ ~ ~ ˆ U1(t ) - U1(t ) = U1(t ) 3U4 (t ) + 3 + 1 U2 (t ) - U3 (t ) » 0. (13) 2 Аналогічно ведуться розрахунки для чотирьох Після проведених розрахунків отримаємо: інших множин s2,s3,s4 та s5. ~ ~ 1 ~ ~ ~ ˆ D1 = U1(t ) - U1(t ) = U1(t ) 3U4 (t ) + 3 + 1 U2 (t ) - U3 (t ) » 0. (14) 2 1 ~ ~ ~ ~ ~ ˆ D 2 = U2 (t ) - U2 (t ) = U2 (t ) 3U5 (t ) - 2U1(t ) + U3 (t ) » 0. (15) 1- 3 [ ( [ ] ) ( ] ] ) [ 3 ~ 3 ~ ~ ~ ~ ˆ U5 (t ) - U2 (t ) » 0. (16) U4 (t ) + D3 = U3 (t ) - U3 (t ) = U3 (t ) 2 2 1 ~ ~ ~ ~ ~ ˆ D 4 = U4 (t ) - U4 (t ) = U4 (t ) 4U1(t ) - 2 3U3 (t )- 3 + 3 U5 (t ) » 0 . (17) 3 -1 1 ~ ~ ~ ~ ~ ˆ D 5 = U5 (t ) - U5 (t ) = U5 (t ) 4U1(t ) - 2 3U2 (t ) - 3U4 (t ) » 0 . (18) 3 Розглянемо вплив відмови кожного ДКШ на Якщо відбулася відмова ДКШ.4, то тотожності тотожностях (14)-(18): (14), (16), (17), (18) руйнуються, тобто дорівнюють Якщо відбулася відмова ДКШ.1, то тотожності нулю. (14), (15), (17), (18) руйнуються, тобто дорівнюють Якщо відбулася відмова ДКШ.5, то тотожності нулю. (15), (16), (17), (18) руйнуються, тобто дорівнюють Якщо відбулася відмова ДКШ.2, то тотожності нулю. (14), (15), (16), (18) руйнуються, тобто дорівнюють З проведеного вище аналізу формуємо настунулю. пні предикатні рівняння: Якщо відбулася відмова ДКШ.3, то тотожності (14), (15), (16), (18) руйнуються, тобто дорівнюють нулю. [ ( [ ] ) ] ì1 - нема відмови (19) z0 = S D1 £ d0 & D 2 £ d0 = í î 0 - відмова { } ì1 - відмова в ДКШ.5 (20) z1 = S D1 £ d0 = í î0 - відмова в ДКШ.1або ДКШ.2 або ДКШ.3 або ДКШ.4 { } ì1 - відмова в ДКШ.4 (21) z2 = S D 2 £ d0 = í î0 - відмова в ДКШ.1 або ДКШ.2 або ДКШ.3 ì1- відмова в ДКШ.1 (22) z3 = S D3 £ d0 = í î0 - відмова в ДКШ.2 або ДКШ.3 ì1 - відмова в ДКШ.2 (23) z 4 = S D 4 £ d0 = í î0 - відмова в ДКШ.3 Отримані предикатні рівняння дають змогу стування у формі дихотомічного дерева, що дає змогу перейти до рішення важливого завдання при сформулювати алгоритм для розв'язання першого та другого завдання діагностування - виявлення побудові діагностичного забезпечення - побудові відмов за допомогою предикату z0 та виявлення правил пошуку місця відмов (ППМ) у БІНС БПЛА. місця відмови за допомогою предикатів z1,z2,z3,z4. Рішення цього завдання засновано на одержанні безумовних ППМ. Це дозволяє представити рішення завдань діагно { } { } { } 7 Розроблене діагностичне дерево (див фіг. 2) у рамках сигнально-параметричного підходу дозволяє вирішувати два найбільш важливих завдання діагностування технічного стану БІНС БПЛА установлення факту виявлення відмови в БІНС і визначення місця його виникнення. 47328 8 Таким чином поставлені завдання повністю вирішуються. Корисна модель дозволяє підвищити відмовостійкість БІНС щодо використання в системах орієнтації на малогабаритних літальних апаратах. 9 Комп’ютерна верстка А. Крулевський 47328 Підписне 10 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPlatform-less inertial navigation system
Автори англійськоюKulik Anatolii Stepanovych, Firsov Serhii Mykolaiovych, Fedorchuk Ihor Volodymyrovych, Davydov Dmytro volodymyrovych, Zlatkin Oleh Yuriiovych, Do Kuok Tuan
Назва патенту російськоюБезплатформенная инерциальная навигационная система
Автори російськоюКулик Анатолий Степанович, Фирсов Сергей Николаевич, Федорчук Игорь Владимирович, Давыдов Дмитрий Владимирович, Златкин Олег Юрьевич, До Куок Туан
МПК / Мітки
МПК: G01C 21/00
Мітки: інерціальна, безплатформна, система, навігаційна
Код посилання
<a href="https://ua.patents.su/5-47328-bezplatformna-inercialna-navigacijjna-sistema.html" target="_blank" rel="follow" title="База патентів України">Безплатформна інерціальна навігаційна система</a>
Безплатформна інерціальна навігаційна система
Номер патенту: 36469
Опубліковано: 27.10.2008
Автори: Хохлов Олександр Дмитрович, Фірсов Сергій Миколайович, Бандура Іван Миколайович, Субота Анатолій Максимович, Кулік Анатолій Степанович
МПК: G01C 21/00
Мітки: безплатформна, навігаційна, інерціальна, система
Формула / Реферат:
Безплатформна інерціальна навігаційна система, що містить основу, блок із трьох акселерометрів, блок із трьох датчиків кутових швидкостей, розраховувач вектора стану, входи якого зв'язані з блоком датчиків кутових швидкостей та блоком акселерометрів, програмні механізми кутового розвороту, число яких відповідає числу датчиків кутових швидкостей в блоці датчиків кутових швидкостей, яка відрізняється тим, що в блок датчиків кутових швидкостей...
Інтегрована навігаційна система
Номер патенту: 15785
Опубліковано: 17.07.2006
Автор: Борисевич Павло Андрійович
МПК: G01C 21/10
Мітки: система, навігаційна, інтегрована
Формула / Реферат:
1. Інтегрована навігаційна система, що містить супутникову навігаційну систему, датчики швидкості судна та блок обробки сигналів, яка відрізняється тим, що у склад системи уведені ехолот, датчик кроку гвинта регульованого кроку, тахогенератор головного двигуна, тахогенератор підрулювального пристрою, датчик кута пера руля, приєднані до відповідних узгоджувальних схем.2. Система за п. 1, яка відрізняється тим, що містить дві...
Комплексна навігаційна система
Номер патенту: 42148
Опубліковано: 15.10.2001
Автор: Бакулін Ігор Євгенович
МПК: G01C 23/00
Мітки: система, навігаційна, комплексна
Формула / Реферат:
Комплексна навігаційна система, що включає інерційну навігаційну систему з використанням як коригований вимірювач, перший і другий відраховувальні пристрої і високоточну кореляційно - екстремальну навігаційну систему з використанням як коригувальний вимірювач, яка відрізняється тим, що у пристрій додатково введені електронний ключ, запам'ятовувальний пристрій і блок керування, причому послідовно з'єднані електронний ключ і запам'ятовувальний...
Навігаційна система системи координат сухопутного транспортного засобу (варіанти)
Номер патенту: 84538
Опубліковано: 10.11.2008
Автори: Нельсон Фредерік В., Рекоу Ендрю Карл Вільхельм, Мерсер Дейв, Пікетт Теренс Даніель
МПК: G01S 05/14, G01C 21/20
Мітки: засобу, транспортного, варіанти, навігаційна, координат, сухопутного, системі, система
Формула / Реферат:
1. Навігаційна система сухопутного транспортного засобу, що містить приймач глобальної системи позиціонування для прийому сигналу від глобальної системи позиціонування та генерування навігаційної інформації для сухопутного транспорту, при цьому навігаційна інформація включає позицію та напрям сухопутного транспортного засобу, систему керування навігацією, що з'єднана з приймачем глобальної системи позиціонування для керування транспортним...
Навігаційна система з охоронними функціями для мобільного об’єкта
Номер патенту: 41818
Опубліковано: 17.09.2001
Автори: Барладін Петро Олександрович, Барладін Олександр Володимирович
МПК: G09B 29/10
Мітки: мобільного, навігаційна, охоронними, система, об'єкта, функціями
Формула / Реферат:
1. Навігаційна система з охоронними функціями для мобільного об'єкта, що містить з'єднані між собою модуль управління, дисплей, картографічний модуль, модуль визначення координат і модуль прийому-передачі радіосигналу, яка відрізняється тим, що обладнана додатково автономним джерелом живлення і модулем стану, з'єднаним із модулем визначення координат, модуль управління обладнаний контролером для мобільного телефону, при цьому блок управління,...
Попередній патент: Виріб для приготування їжі
Наступний патент: Валковий класифікатор
Випадковий патент: Спосіб виробництва хлібців "томатних" геродієтичного призначення