Спосіб та оптико-електронний пристрій для обчислення параметрів труби (варіанти)
Номер патенту: 83895
Опубліковано: 26.08.2008
Автори: Воробель Роман Антонович, Гапонюк Ярослав Васильович

Формула / Реферат
1. Спосіб визначення параметрів труби, який полягає у тому, що послідовно в часі формують світлову площину, яку направляють на поверхню труби, утворюють на цій поверхні світлову криву, формують зображення цієї світлової кривої на фотосенсорі формувача зображення, який розташовують паралельно до світлової площини на наперед заданій віддалі, розбивають зображення світлової кривої на послідовність елементів зображення, який відрізняється тим, що методом перебору всіх елементів зображення формують групи з п'яти елементів зображення, кожна група є унікальною комбінацією з п'яти елементів зображення, визначають з заданою похибкою для кожної групи величину малої та великої півосей відповідного даній групі еліпса, при цьому за результуючу малу та велику півосі еліпса вибирають малу та велику півосі еліпса з найбільшою статистичною ймовірністю появи в множині всіх малих та великих півосей еліпсів, визначених з заданою похибкою для всіх груп з п'яти елементів, зображення світлової кривої, причому світлову площину відносно поверхні труби розташовують довільно в межах, які забезпечують формування чіткого та якісного зображення світлової кривої на фотосенсорі формувача зображення, достатнього для реалізації запропонованого способу.
2. Спосіб за п. 1, який відрізняється тим, що формують додатково другу світлову площину, яку розташовують паралельно на наперед заданих віддалях від першої світлової площини та фотосенсора формувача зображення та направляють на ту ж поверхню труби, що і першу світлову площину, утворюють на цій поверхні другу світлову криву, формують зображення другої світлової кривої на фотосенсорі формувача зображення, розбивають зображення другої світлової кривої на послідовність елементів зображення, вимірюють віддаль між зображеннями першої та другої світлових кривих на поверхні фотосенсора формувача зображення в напрямку ортогональної проекції осі труби на фотосенсор формувача зображення, вимірюють кут повороту фотосенсора формувача зображення відносно ортогональної проекції осі труби на фотосенсор формувача зображення, а малу та велику півосі кожного еліпса, який відповідає групі з п'яти елементів зображення першої або другої світлової кривої, додатково трансформують шляхом врахування віддалі між першою та другою світловими кривими та кута повороту фотосенсора формувача зображення відносно ортогональної проекції осі труби, причому трансформовану малу та велику півосі еліпса з найбільшою статистичною ймовірністю появи в множині всіх трансформованих малих та великих півосей еліпса відповідно вибирають за малу та велику півосі труби з еліптичною формою перерізу.
3. Спосіб за п. 1, який відрізняється тим, що результуючу малу вісь еліпса вибирають за радіус циліндричної труби, а елементи зображення світлової кривої, які спричиняють до утворення еліпсів, півосі яких відмінні від результуючих малої та великої півосей еліпса, зараховують до дефектних ділянок поверхні труби та проводять оцінку величини дефектів поверхні труби як функцію різниці між координатами елементів зображення світлової кривої, які належать або не належать до елементів зображення еліпса, по якому визначають радіус циліндричної труби.
4. Спосіб за п. 2, який відрізняється тим, що елементи зображення першої або другої світлової кривої, які спричиняють до утворення трансформованих еліпсів, півосі яких відрізняються від малої та великої півосей труби з еліптичною формою перерізу, зараховують до дефектних ділянок поверхні труби та проводять оцінку величини дефектів поверхні труби як функцію різниці між координатами елементів зображення світлової кривої, які належать або не належать до елементів зображення еліпса, по якому визначають радіус труби з еліптичною формою перерізу.
5. Спосіб за п. 1 або п. 2, який відрізняється тим, що додатково формують перше зображення наперед заданої точки на поверхні труби в інфрачервоному діапазоні випромінювання, після чого нагрівають поверхню труби в наперед заданій точці безконтактним методом протягом заданого проміжку часу, після закінчення нагрівання формують n-1 інфрачервоних зображень заданої точки на поверхні труби, кожне з яких відповідає одному з n-1 заданих проміжків часу, причому товщину стінки труби визначають за наперед встановленою функцією від значення яскравостей n отриманих зображень заданої точки на поверхні труби.
6. Пристрій для обчислення параметрів труби, що складається з формувача зображення, формувача структурованого освітлення у вигляді світлової площини, блока індикації результатів обчислення, який відрізняється тим, що додатково має апаратно-програмний блок для обчислення півосей еліпса, причому вихід формувача зображення підключений до входу апаратно-програмного блока, вихід котрого з'єднаний зі входом блока індикації результатів обчислення, причому фотосенсор формувача зображення розташований паралельно до світлової площини на наперед заданій віддалі, а положення формувача зображення разом з формувачем структурованого освітлення та генерованою ним світловою площиною відносно поверхні труби довільне в межах, які забезпечують працездатність пристрою.
7. Пристрій за п. 6, який відрізняється тим, що формувач структурованого освітлення у вигляді світлової площини виконаний з можливістю формування другої світлової площини, яка розташована на заданій віддалі від першої світлової площини та паралельно до неї, а апаратно-програмний блок виконаний з можливістю обчислення малої та великої півосей еліптичного перерізу труби.
8. Пристрій за п. 6 або п. 7, який відрізняється тим, що додатково має безконтактний імпульсний нагрівач заданої точки на поверхні труби, другий апаратно-програмний блок та формувач зображення заданої точки на поверхні труби в інфрачервоному діапазоні випромінювання, вихід котрого підключений до входу другого апаратно-програмного блока, виходом з'єднаного із входом блока індикації результатів обчислення та виходом першого апаратно-програмного блока.
Текст
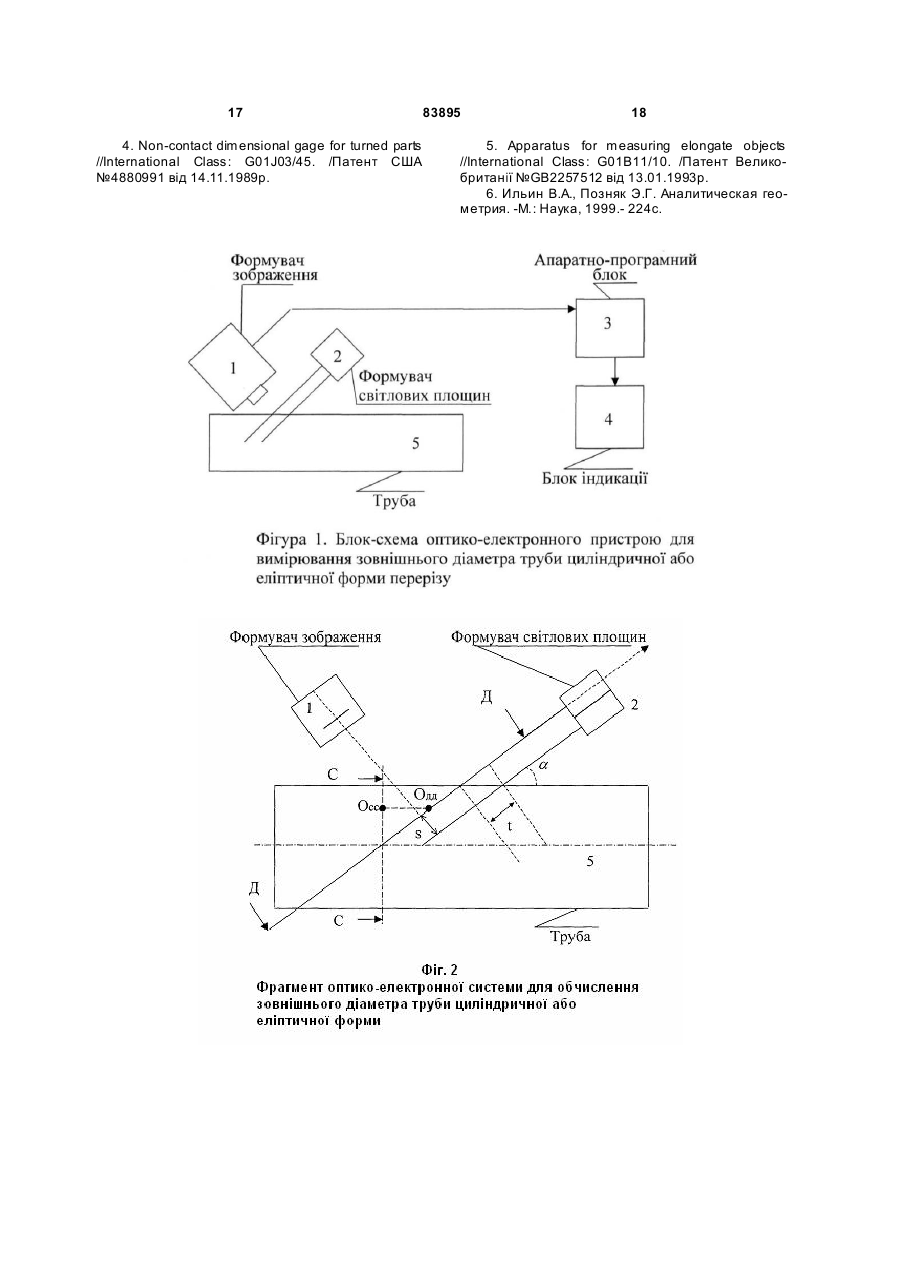
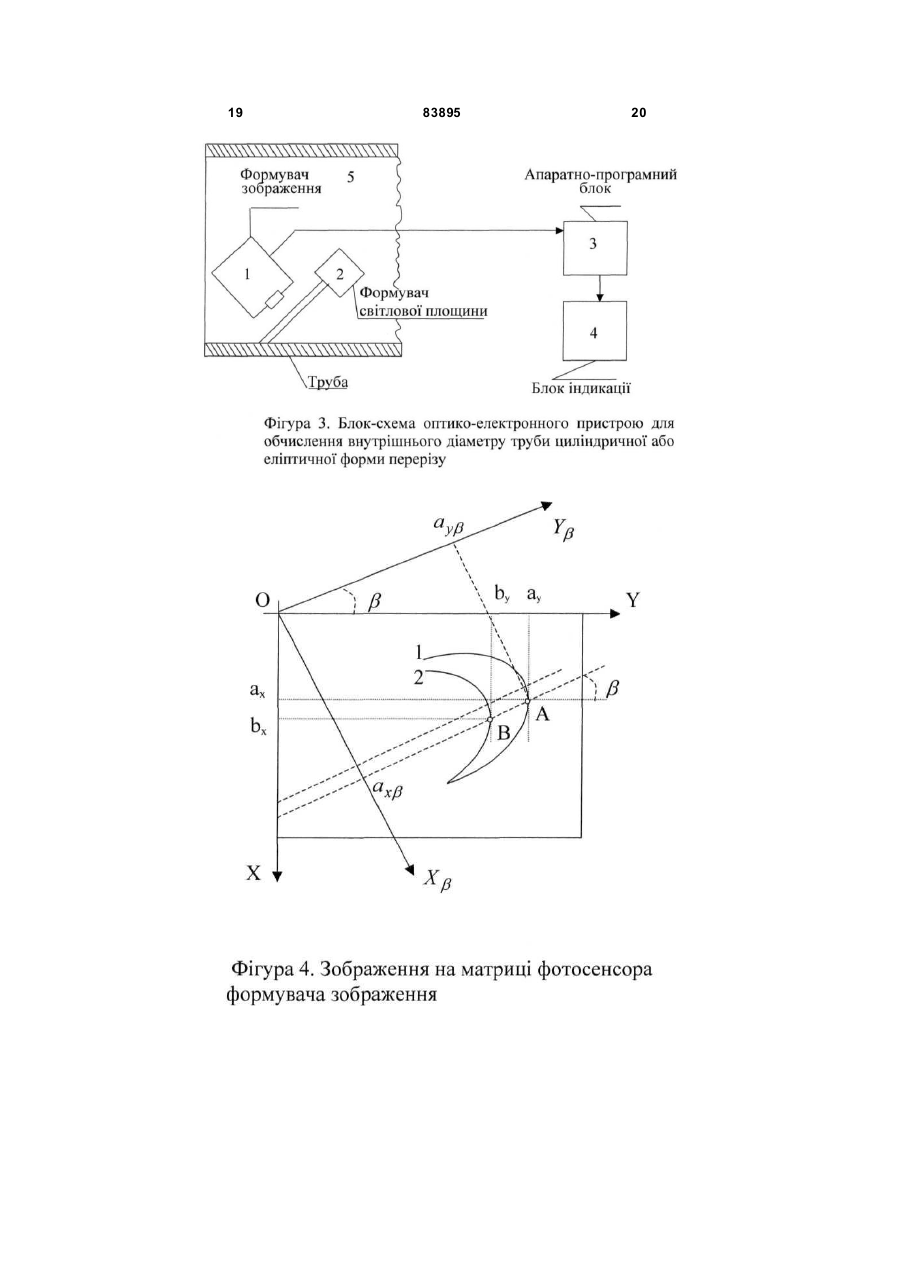
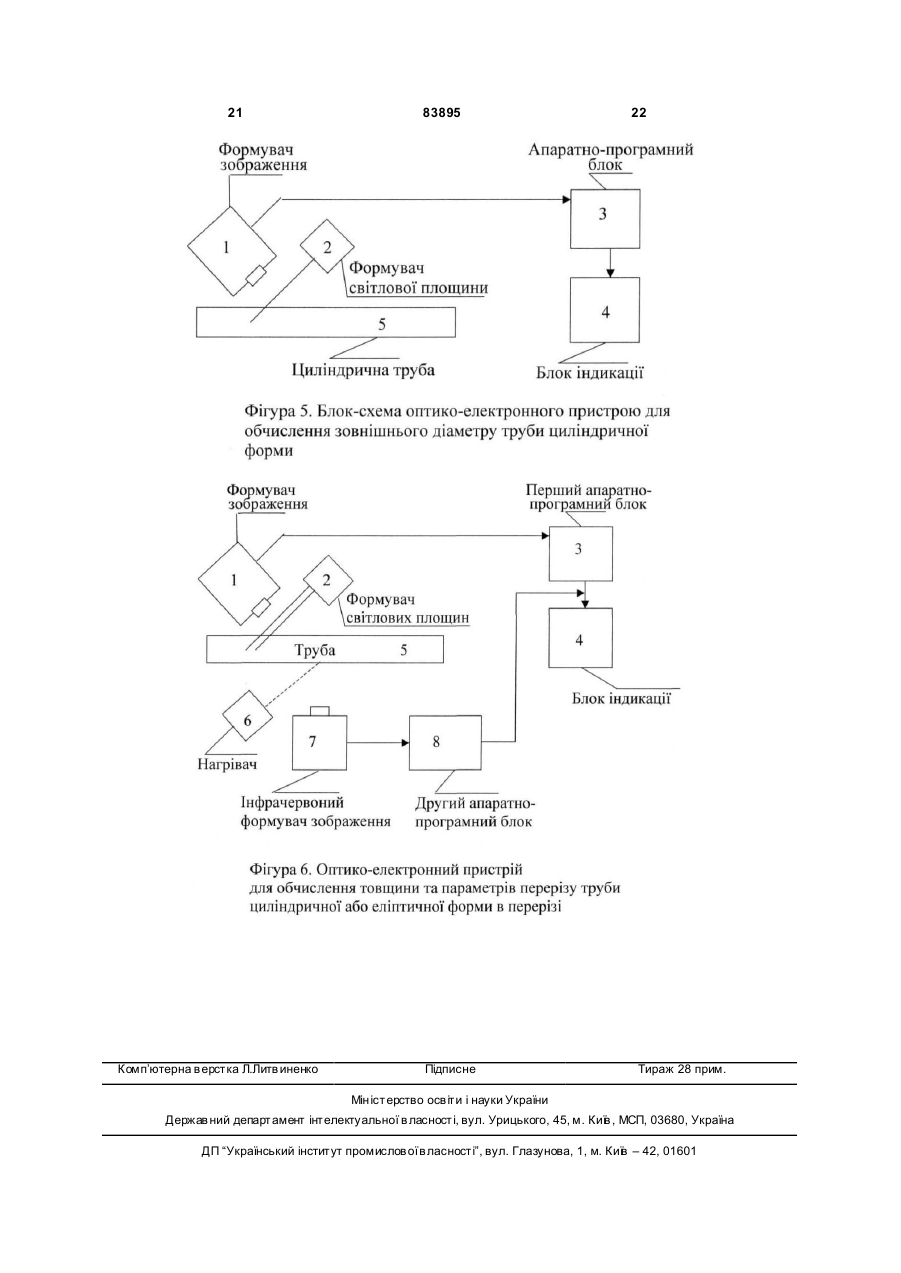
1. Спосіб визначення параметрів труби, який полягає у тому, що послідовно в часі формують світлову площину, яку направляють на поверхню труби, утворюють на цій поверхні світлову криву, формують зображення цієї світлової кривої на фотосенсорі формувача зображення, який розташовують паралельно до світлової площини на наперед заданій віддалі, розбивають зображення світлової кривої на послідовність елементів зображення, який відрізняється тим, що методом перебору всіх елементів зображення формують групи з п'яти елементів зображення, кожна група є унікальною комбінацією з п'яти елементів зображення, визначають з заданою похибкою для кожної групи величину малої та великої півосей відповідного даній групі еліпса, при цьому за результуючу малу та велику півосі еліпса вибирають малу та велику півосі еліпса з найбільшою статистичною ймовірністю появи в множині всіх малих та великих півосей еліпсів, визначених з заданою похибкою для всіх гр уп з п'яти елементів, зображення світлової кривої, причому світлову площину відносно поверхні труби розташовують довільно в межах, які забезпечують формування чіткого та якісного зображення світлової кривої на фотосенсорі формувача зображення, достатнього для реалізації запропонованого 2. Спосіб способу. за п. 1, який відрізняється тим, що формують додатково другу сві тлову площину, яку розташовують паралельно на наперед заданих віддалях від першої світлової площини та фотосенсора формувача зображення та направляють на 2 (19) 1 3 83895 4 належать або не належать до елементів зображення еліпса, по якому визначають радіус тр уби з еліптичною формою перерізу. 5. Спосіб за п. 1 або п. 2, який відрізняється тим, що додатково формують перше зображення наперед заданої точки на поверхні труби в інфрачервоному діапазоні випромінювання, після чого нагрівають поверхню труби в наперед заданій точці безконтактним методом протягом заданого проміжку часу, після закінчення нагрівання формують n1 інфрачервоних зображень заданої точки на поверхні труби, кожне з яких відповідає одному з n-1 заданих проміжків часу, причому товщину стінки труби визначають за наперед встановленою функцією від значення яскравостей n отриманих зображень заданої точки на поверхні труби. 6. Пристрій для обчислення параметрів труби, що складається з формувача зображення, формувача структурованого освітлення у вигляді світлової площини, блока індикації результатів обчислення, який відрізняється тим, що додатково має апаратно-програмний блок для обчислення півосей еліпса, причому вихід формувача зображення підключений до входу апаратно-програмного блока, вихід котрого з'єднаний зі входом блока індикації результатів обчислення, причому фотосенсор фо рмувача зображення розташований паралельно до світлової площини на наперед заданій віддалі, а положення формувача зображення разом з формувачем структурованого освітлення та генерованою ним світловою площиною відносно поверхні труби довільне в межах, які забезпечують працездатність пристрою. 7. Пристрій за п. 6, який відрізняється тим, що формувач стр уктурованого освітлення у вигляді світлової площини виконаний з можливістю формування другої сві тлової площини, яка розташована на заданій віддалі від першої світлової площини та паралельно до неї, а апаратнопрограмний блок виконаний з можливістю обчислення малої та великої півосей еліптичного перерізу труби. 8. Пристрій за п. 6 або п. 7, який відрізняється тим, що додатково має безконтактний імпульсний нагрівач заданої точки на поверхні труби, другий апаратно-програмний блок та формувач зображення заданої точки на поверхні труби в інфрачервоному діапазоні випромінювання, вихід котрого підключений до входу др угого апаратнопрограмного блока, виходом з'єднаного із входом блока індикації результатів обчислення та виходом першого апаратно-програмного блока. Винахід відноситься до вимірювальної техніки і може бути використаний для вимірювання діаметру циліндричних виробів або розмірів півосей труб, які мають еліптичний поперечний переріз, а також для визначення наявності дефектів на їх поверхні. Відомий тіньовий спосіб для вимірювання зовнішніх розмірів виробу, який полягає в тому, що промінь лазера сканує виріб, оптичний пристрій визначає розмір виробу пропорційно до часу, на протязі якого промінь лазера перекривається вказаним виробом [1]. Недолік способу полягає в тому, що відповідні йому пристрої є складними у ви готовленні та налагоджуванні, а також в обмежених функціональних можливостях за рахунок вимірювання тільки тіньового розміру виробу. Близьким по своїй суті до заявленого є спосіб для визначення діаметру отвору в контактних площадках мікросхем, який полягає в тому, що оптико-електронний формувач зображення фіксує зображення двовимірної кривої, процесор обробляє вказане зображення та перетворює його в набір точок, вибирає з вказаного набору груп у з трьох точок та підставляє їх координати в рівняння кола і визначає радіус кола після розв'язку даного рівняння [2]. Недоліком даного способу є його обмежені функціональні можливості, які не дозволяють йому визначати діаметр тривимірних об'єктів, таких як труби, та необхідність виконувати складні обчислення, що призводить до низької швидкодії відповідних йому пристроїв. Найближчим аналогом є спосіб для вимірювання кривизни поверхні виробів за допомогою структурованого освітлення, в якому параметри просторової кривої визначаються за допомогою обробки зображення світлової кривої, отриманої за допомогою застосування телекамери та лінійного структурованого освітлення. Для обчислення параметрів кривої в способі запропоновано використовувати наближення поліномом за допомогою методу найменших квадратів точок кривої, координати яких фіксуються телекамерою та обчислюються на основі триангуляційного методу [3]. Застосування даного способу обчислення параметрів кривої стосовно параметрів труб має ряд недоліків. Наближення поліномом у випадку знаходження діаметра кола зводиться до розв'язку системи трьох рівнянь. Апаратна реалізація обчислювального блоку для розв’язку системи трьох рівнянь є складною при конструюванні та громіздкою і енергоємною при експлуатації. При програмній реалізації на основі мікропроцесора послідовної дії така система має невисоку швидкодію внаслідок необхідності виконання великої кількості послідовних операцій. При необхідності застосування переносних портативних пристроїв та обробки великої кількості точок вказані недоліки мають вирішальне значення при конструюванні пристроїв обчислення діаметрів циліндричних виробів. Крім того, запропонований спосіб не дає можливості правильно визначати параметри кривої та наявність дефектів на поверхні виробу. Метою винаходу є розробка способу обчислення діаметру циліндричної труби або розмірів труби з еліптичною формою поперечного перерізу 5 83895 при наявності дефектів на їх поверхні з метою підвищення швидкодії, точності та розширення функціональних можливостей оптико-електронних пристроїв для вимірювання параметрів труб за рахунок визначення наявності дефектів на їх поверхні, а також зменшення вартості відповідних пристроїв та затрат на їх встановлення і обслуговування. Для досягнення цієї мети запропоновано спосіб визначення параметрів труби, який полягає в тому, що послідовно в часі формують світлову площину, яку направляють на нелінійну поверхню, утворюють на нелінійній поверхні світлову криву, за допомогою формувача зображення формують зображення світлової кривої на фотосенсорі формувача зображення, який розташовують паралельно до світлової площини на наперед заданій віддалі, розбивають зображення світлової кривої на послідовність елементів зображення, методом перебору всіх елементів зображення формують групи з п'яти елементів зображення, кожна група містить унікальну комбінацію з п'яти елементів зображення, для кожної групи обчислюють значення малої та великої півосей відповідного даній групі еліпса, радіусом циліндричного виробу вважають таку величину, яка відповідає тому значенню малої півосі еліпса, яке має найбільшу статистичну ймовірність появи в діапазоні всіх значень малих півосей еліпса, обчислених для всіх груп з п'яти елементів зображення світлової кривої, великою піввіссю еліпса вважають таку величину, яка відповідає значенню великої півосі еліпса, яка має найбільшу статистичн у ймовірність появи в діапазоні всіх значень великих півосей еліпса, обчислених для всіх гр уп з п'яти елементів зображення світлової кривої, дефектами поверхні вважають ті елементи зображення світлової кривої, які спричиняють до утворення еліпсів, для яких значення півосей відрізняються від значень, які мають найбільшу статистичну ймовірність появи в діапазоні всіх значень півосей еліпсів, обчислених для всіх гр уп з п'яти елементів зображення світлової кривої, причому конструктивно зафіксовані між собою формувач зображення та формувач стр уктурованого освітлення разом з світловою площиною розташовують довільно відносно поверхні труби в межах, які забезпечують формування чіткого та якісного зображення світлової кривої на фотосенсорі формувача зображення, достатнього для реалізації запропонованого способу. Описаний вище спосіб є достатнім для обчислення діаметру тр уби циліндричної форми та визначення наявності дефектів на її поверхні. Проте підчас виготовлення або після тривалої експлуатації тр уб вони можуть втрачати циліндричну і набувати еліптичну в перерізі форму. Тому для даного випадку запропонований вище спосіб модифікується за рахунок того, що формують додатково другу світлову площин у, яку розташовують паралельно на наперед заданих віддалях від першої світлової площини та фотосенсора формувача зображення та направляють на ту ж нелінійну поверхню, що і першу світлову площин у, утворюють на нелінійній поверхні другу світлову криву, за допомогою формувача зображення формують 6 зображення другої світло вої кривої на фотосенсорі формувача зображення, розбивають зображення другої світлової кривої на елементи, вимірюють віддаль між зображенням першої та другої сві тлових кривих на поверхні фо тосенсора формувача зображення в напрямку ортогональної проекції осі труби на фотосенсор формувача зображення, вимірюють кут повороту фотосенсора формувача зображення відносно ортогональної проекції осі труби на фотосенсор формувача зображення, причому малу та велику півось кожного еліпса, який відповідає групі з п'яти елементів зображення першої або другої світлової кривої, трансформують шляхом врахування віддалі між першою та другою сві тловими кривими та кута повороту фотосенсора формувача зображення відносно ортогональної проекції осі труби, причому мала та велика півосі труби з еліптичною формою перерізу співпадають з тими трансформованими значеннями малої та великої півосей еліпса, які мають найбільшу статистичну ймовірність появи в діапазоні всіх трансформованих значень малої та великої півосей еліпса відповідно. Дефектами поверхні вважають ті елементи зображення першої або другої світлової кривої, які спричиняють до утворення нетрансформованих або трансформованих еліпсів, для яких значення будь-якої з півосей відрізняються від значень, які мають найбільшу статистичну ймовірність появи в діапазоні всіх значень півосей еліпсів, обчислених для всіх груп з п'яти елементів зображення однієї із світлових кривих. Оцінку величини дефектів поверхні проводять відповідно до відомих алгоритмів, розгляд яких виходить за межі даної роботи. В розширеному варіанті запропонованого способу крім зовнішніх (або внутрішніх) параметрів труби визначають також і товщину стінки труби. Тому будь-яку модифікацію запропонованого вище способу доповнюють тим, що додатково формують перше зображення наперед заданої точки на поверхні труби в інфрачервоному діапазоні випромінювання, після чого нагрівають поверхню труби в наперед заданій точці безконтактним методом на протязі заданого проміжку часу, після закінчення нагрівання формують n-1 інфрачервоних зображень заданої точки на поверхні труби, кожне з яких відповідає одному з n-1 заданих проміжків часу, причому товщин у стінки труби визначають за наперед встановленою функцією від значення яскравостей n отриманих зображень заданої точки на поверхні труби. Для зображення світлової кривої, отриманої за допомогою цифрового формувача зображення, під елементом зображення слід вважати окремий піксел фотоматриці формувача зображення, який належить зображенню світлової кривої, або групу пікселів, сформованих по наперед визначеному критерію. Координатами елемента зображення, що складається з групи пікселів, вважаються координати піксела, що відповідає деякій попередньо заданій геометричній характеристиці даної групи пікселів, наприклад, геометричному центрові. Додані до відомого способу дії використовуються в інформаційно-вимірювальних системах, 7 83895 але окремо вони не володіють властивостями, які б забезпечили вирішення поставленої задачі. Такими властивостями володіє лише їх запропонована сукупність, тобто, вступаючи в взаємодію, сукупність ознак надає заявленій системі нову якість, яка відповідає критерію "суттєві відмінності". Пояснення суті запропонованого способу буде проведено нижче при розгляді пристрою, який його реалізує. Відомий пристрій для вимірювання діаметру виробів складається з трьох джерел колімованих променів світла, трьох фотодетекторів, вимірювального пристрою та процесорного пристрою [4]. Недоліками даного пристрою є невисокий робочий діапазон, складність у виготовленні та налагоджуванні, невисока точність вимірювань внаслідок необхідності обробки аналогових сигналів. Пристрій, призначений для вимірювання діаметру дерев'яних колод за допомогою випромінювача та приймача світлової площини, які розташовані на протилежних сторонах дерев'яної колоди, обчислює діаметр колоди за рахунок вимірювання величини затінення, яке створюється колодою та фіксується приймачем світлової площини [5]. Недоліками даного пристрою є ті ж недоліки, що і в попередньому пристрої. Додатковим недоліком пристрою є ускладнення конструкції транспортера колод. Найближчим аналогом до заявленого є пристрій для вимірювання кривизни поверхні виробів за допомогою структурованого освітлення [3], який вимірює кривизну поверхні деталей кузова автомобіля, який складається з телекамери, формувача світлової площини та обчислювальних блоків. Світлова площина, направлена до поверхні деталі під наперед заданим кутом, формує на поверхні деталі нелінійну світлову криву, яка фіксується телекамерою, її зображення передається в обчислювальну систему, котра визначає параметри поверхні деталі кузова автомобіля. Недоліком запропонованого пристрою є необхідність проведення структурованого освітлення деталі під наперед заданим фіксованим кутом по відношенню до деталі, а також відсутність можливості обчислення параметрів циліндричних або еліптичних в своєму перерізі виробів, зокрема труб. Метою винаходу є розробка пристрою для обчислення параметрів циліндричної або еліптичної в перерізі труби при наявності дефектів на її поверхні, а саме зовнішніх або внутрішніх розмірів, а також товщини стінки труби, підви щення точності вимірювання параметрів труби, встановлення наявності дефектів на її поверхні, зменшення затрат на встановлення та експлуатацію пристрою. Для досягнення цієї мети запропоновано пристрій для обчислення параметрів циліндричної в перерізі труби, який складається з формувача зображення та формувача структурованого освітлення, який генерує одну світлову площин у, блока індикації результатів обчислення, апаратнопрограмного блока для обчислення півосей еліпса, причому вихід формувача зображення підключений до входу апаратно-програмного блоку, ви хід котрого підключений до входу блоку індикації ре 8 зультатів обчислення, фотосенсор формувача зображення розташований паралельно до світлової площини на наперед заданій віддалі, а положення формувача зображення разом з формувачем структурованого освітлення та генерованою ним світловою площиною відносно поверхні труби довільне в межах, які забезпечують працездатність пристрою. Запропоновано також пристрій для обчислення параметрів еліптичної в перерізі труби, який відрізняється від вищенаведеного тим, що формувач стр уктурованого освітлення генерує дві паралельні світлові площини, які розташовані на відомій віддалі одна від одної, формувач зображення відображає дві світлові криві, а апаратнопрограмний блок проводить обробку зображення двох світлови х кривих та обчислює малу та велику півосі еліптичного перерізу труби. Запропоновано також варіант пристрою для обчислення параметрів еліптичної в перерізі труби, який відрізняється від вищенаведеного тим, що формувач стр уктурованого освітлення генерує одну світлову площин у, яка має наперед задану товщин у. Першою світловою кривою вважається крива, сформована переднім фронтом світлової площини, другою світловою кривою вважається крива, сформована заднім фронтом світлової площини на поверхні труби. Функціональність запропонованих вище варіантів пристрою розширюється після того як з метою вимірювання товщини стінки труби в кожен з них додатково введено безконтактний імпульсний нагрівач заданої точки на поверхні труби, другий апаратно-програмний блок, формувач зображення заданої точки на поверхні труби в інфрачервоному діапазоні випромінювання, розташований на заданій віддалі від заданої точки на поверхні труби, вихід котрого підключений до входу другого апаратно-програмного блоку, вихід котрого підключений до входу блоку індикації результатів обчислення та ви ходу першого апаратно-програмного блоку. Додані до відомого пристрою обчислення кривизни поверхні елементи та зв'язки використовуються в інформаційно-вимірювальних системах, але окремо вони не володіють властивостями, які б забезпечили вирішення поставленої задачі. Такими властивостями володіє лише їх запропонована сукупність, тобто, вступаючи в взаємодію, сукупність ознак надає заявленій системі нову якість, яка відповідає критерію "суттєві відмінності". Для кращого розуміння суті винаходу додаються креслення, де на фігурі 1 зображена блоксхема оптико-електронного пристрою для випадку обчислення зовнішнього діаметру тр уби циліндричної або еліптичної форми перерізу. На фігурі 2 подано фрагмент фігури 1, на фігурі 3 показано випадок застосування пристрою, поданого на фігурі 1, для обчислення внутрішнього діаметру труби. На фігурі 4 показано вигляд кривих на матриці фотосенсора формувача зображення для випадку, поданого на фігурі 1. На фігурі 5 подано блоксхему оптико-електронного пристрою для обчислення зовнішнього діаметру труби циліндричної форми. На фігурі 6 показано блок-схему оптико 9 83895 електронного пристрою для обчислення товщини, зовнішнього та внутрішнього діаметрів труби циліндричної або еліптичної форми в перерізі. Відповідно до креслення на фігурі 1 пристрій для обчислення параметрів циліндричного або еліптичного в перерізі виробу та встановлення дефектності його поверхні складається з формувача 1 зображення, формувача 2 світлових площин, програмно-апаратного модуля 3, а також блока 4 індикації отриманих результатів, причому формувач 2 спрямовує сві тлові площини на трубу 5. На фігурі 2 подано фрагмент оптикоелектронної системи для обчислення зовнішнього діаметра труби циліндричної або еліптичної форми в перерізі, який містить формувач 1 зображення та формувач 2 світлових площин, які спрямовані на трубу 5. На фігурі 3 зображено блок-схему оптикоелектронного пристрою для випадку обчислення внутрішнього діаметру труби циліндричної або еліптичної форми перерізу. Дане креслення подане для того, щоб показати можливість застосування одного і того ж пристрою для вимірювання як зовнішнього, так і внутрішнього діаметрів труби. Формувач 2 світлових площин утворює на зовнішній або внутрішній поверхні труби 5 тривимірні світлові криві, які за допомогою формувача 1 зображення перетворюються в зображення двовимірних кривих на фотоматриці формувача 1 зображення, котрі передаються в програмно-апаратний модуль 3, результат роботи котрого фіксується на дисплеї блока 4 індикації отриманих результатів. На фігурі 4 подано зображення на матриці фотосенсора формувача 1 зображення для випадку вимірювання зовнішнього діаметру труби, якому відповідають фігура 1 та фігура 2. Двомірні криві 1 та 2 відповідають першій та другій світловим кривим, утворених на поверхні труби першою та другою світловими площинами, сформованими формувачем 2 структурованого освітлення. Координатна система ХОУ розташована таким чином, що її початок координат знаходиться в лівому верхньому куті матриці формувача 1 зображення. Фігура 4 буде справедливою також для випадку обчислення внутрішнього діаметру труби, поданого на фігурі 3, після повороту формувача 1 зображення навколо власної осі на кут 180 градусів. Пристрій для обчислення зовнішнього діаметра циліндричної труби, поданий на фігурі 5, є частковим випадком пристрою для обчислення параметрів труби з циліндричною або еліптичною формою перерізу, тому пояснення принципів роботи обох пристроїв доцільно почати з більш загального випадку - обчислення параметрів труби з циліндричною або еліптичною формою перерізу. Розглянемо більш детально випадок, поданий на фігурі 2, де зображено фрагмент блок-схеми електронного пристрою для обчислення зовнішнього діаметра труби циліндричної або еліптичної форми в перерізі, в якому застосовується стр уктуроване освітлення труби за допомогою двох світлових площин, який має найбільш суттєве значення для розуміння роботи пристрою. На фрагменті 10 зображено оптико-електронний формувач 1 зображення, формувач 2 двох паралельних світлових площин, причому формувачі 1 та 2 об'єднані в єдиний жорсткий конструктив таким чином, що матричний фотосенсор формувача 1 зображення завжди розташований паралельно світловим площинам формувача 2 структурованого освітлення, який підсвічує трубу 5 овальної форми в перерізі, віддаль між світловими площинами є відомою, конструктивно заданою величиною s. Принцип роботи пристрою полягає в тому, що освітлення у вигляді світлових площин спрямовується на опуклу поверхню труби таким чином, щоб утворити дві світлові просторові криві на поверхні труби, які в свою чергу фіксуються формувачем зображення та перетворюються в дві двовимірні криві на площині фоточутливої матриці формувача зображення так як зображено на фігурі 4. Аналіз зображення світлових кривих повинен надати інформацію про параметри труби еліптичної форми, а саме розміри півосей її перпендикулярного перерізу. Для вирішення цієї задачі нам потрібно встановити взаємозв'язок між еліпсом, який утворюється внаслідок перпендикулярного перерізу труби еліптичної форми, світловою кривою, утвореною світловою площиною на поверхні труби, та її зображенням на матричному фо тосенсорі формувача 1 зображення. Перша світлова площина формувача 2 структурованого освітлення застосовується для утворення світлової кривої на поверхні труби з метою визначення кривизни поверхні, друга світлова площина введена з метою обчислення кута а нахилу світлови х площин відносно осі труби, який визначається із співвідношення: tga = s/t; (1) де s - віддаль між світловими площинами, t проекція на матрицю фотосенсора формувача зображення віддалі між світловими кривими на поверхні труби в точках їх максимума (перша похідна рівна нулю). На фігурі 4 величина t відображається відрізком AB. На фігурі 4 подано зображення, яке ми отримуємо на матриці фотосенсора формувача зображення. Криві 1 та 2 - це зображення на фотосенсорі формувача 1 зображення просторових світлових кривих, які утворюються внаслідок перетину світлови х площин з поверхнею труби. При довільному розташуванні конструктиву, який об'єднує формувачі 1 та 2, по відношенню до поверхні труби з метою коректного обчислення шуканих параметрів ми змушені враховувати не тільки кут a між оптичною віссю формувача зображення та віссю тр уби, але і кут β повороту ортогональної проекції осі труби на фотосенсор формувача 1 зображення відносно вибраної координатної системи, сформованої сторонами матриці фотосенсора формувача 1 зображення. Це обумовлено, по-перше, тим, що еліпс, на відміну від кола, не є круговою фігурою, і для правильного обчислення його параметрів слід враховувати його просторове положення відносно вимірювального пристрою, а по-друге, тому, що для спрощення обчислень бажано використовувати систему координат, осі якої співпадають зі сторонами матриці фотосенсора 11 83895 формувача 1 зображення. Це дає можливість для обчислення координати точки зображення використовувати порядковий номер відповідного піксела по горизонталі та вертикалі матриці фотосенсора. Використовуючи фігур у 4 покажемо, яким чином можна отримати значення кутів a та β внаслідок аналізу зображення світлових кривих 1 та 2. Обрахувати значення кута a ми можемо із формули (1), але для цього нам потрібно встановити величину значення t - проекції на матрицю фотосенсора формувача зображення величини зсуву світлових кривих на поверхні труби. Очевидно, що в результаті умовного перетину двох паралельних світлових площин з поверхнею труби ми отримаємо дві ідентичні світлові криві, зміщені на поверхні труби на деяку віддаль. Проекції цих сві тлових кривих на поверхні матриці фотосенсора формувача зображення внаслідок особливостей конструктива 4, також будуть майже ідентичними. Неідентичність кривих може бути наслідком масштабуючого оптичного перетворення оптичною системою формувача 1 зображення. Але якщо віддаль від фотоматриці формувача 1 зображення є значно більшою від віддалі між світловими площинами, то результуючою похибкою обчислення можна знехтувати. Саме таку умову ми і приймаємо в даному випадку, тому ви щевказаною похибкою обчислення ми нехтуємо і величину зсуву проекцій 1 та 2 світлових кривих на матриці формувача зображення визначаємо як відрізок AB між ідентичними точками кривих 1 та 2, тобто точками, які мають однакове значення першої похідної. Найпростішими для пошуку, з алгоритмічної точки зору, є точки, які мають нульове значення першої похідної, тобто точки максимуму А та В для кривих 1 та 2 відповідно, в системі координат, яка формується сторонами матриці фотосенсора формувача 1 зображення, так як показано на фігурі 4. При такому підході координати точок А(а х, а у) та B(b x, by) будуть визначатися як порядкові номера пікселів по вертикалі (ау, bу) та горизонталі (ах, bх) матриці фотосенсора формувача зображення, без додаткових обчислень. Тому величина t дорівнює величині відрізка AB: t = AB = (a y - b y )2 + (a x - b x )2 ; (2) а величина кута a визначається з рівняння: tga = s / t = s / AB = s / (a y - by )2 + (a x - bx )2 ;(3) Крім того, відрізок АВ є паралельним до проекції осі труби на матрицю фотосенсора формувача зображення. Тому кут b буде визначатися з рівняння: (4) tg b = (b x - a x ) / a y - b y ; ( ) Введемо нову систему координат Xb OYb , яка буде повернута відносно системи координат XOY на кут b проти годинникової стрілки. Координати елементів зображень світлових кривих в новій системі координат будуть пов'язані з координатами точок зображень світлових кривих в попередній системі координат залежностями: xb = x cos b + y sin b; yb = - x sinb + y cos b ; (5) 12 Для спрощення формул будемо вважати, що масштабний коефіцієнт оптичного перетворення формувача зображення дорівнює 1. В такому разі зображення світлових кривих на матриці фотосенсора формувача зображення ідентичне тим світловим кривим, які утворені внаслідок умовного перерізу еліптичної труби паралельною до матриці фотосенсора світловою площиною Д-Д. Очевидно, що ми можемо перенести на площину Д-Д координатну систему Xb OYb так, щоб її розташування було таким же, як і на площині матриці формувача зображення, тобто координати точок світлової кривої в системі координат (ΧΟΥ)ДД були такими ж, як і в системі координат Xb OYb . На фігурі 2 вісь XДД ми будемо спостерігати як точку О, а вісь ΥДД буде направлена вздовж лінії ДД. Тому справедливим будуть рівняння: (6) x d = x b ; y d = yb . Тепер спроектуємо світлову криву на площину С-С. Очевидно, що проекція світлової кривої на площину С-С є частиною периметра еліптичної труби, тобто частиною еліпса, параметри якого ми і намагаємося знайти. Спроектуємо осі координат (ΧΟΥ) ДД на площину С-С, що означає вибір на площині С-С такої системи координат, яка б була пов'язана з системою координат (ΧΟΥ) ДД відомими нам проекційними залежностями. В системі координат (XOY)CC координати точок проекції світлової кривої будуть визначатися через координати точок світлової кривої в системі координат (ΧΟΥ) ДД наступними залежностями: (7) x c = x d ; y c = y d cos a Початок системи координат (XOY)CC не співпадає з центром перерізу еліптичної труби, але для визначення розмірів півосей еліпса така вимога необов'язкова. Еліпс описується кривою другого порядку у вигляді [6]: a x 2 + 2a xy + a y 2 + 2a x + 2a y + a = 0; (8) 11 12 22 13 23 33 коефіцієнти якої можна визначити, якщо відомо її п'ять точок з координатами (хn,уn), де n=1,2,3,4,5 відповідно до рівняння, яке описується детермінантом: x2 x2 1 x2 2 x2 3 x2 4 x2 5 xy x1y1 x2 y2 x3 y3 x4 y 4 x5 y5 y2 y2 1 y2 2 y2 3 y2 4 y2 5 x y 1 x1 y1 1 x2 y2 1 x3 y3 x4 y4 1 x5 y5 1 = 0; (9) 1 З урахуванням перетворень, які описуються рівняннями (1)-(7), підставляємо в рівняння (9) координати п'яти точок, які належать кривій 1 (або 2), визначаємо коефіцієнти рівняння (8), після чого визначаємо півосі a, b шуканого нами еліпса по формулах: a= - I3 ' I 2 a 11 ; b= - I3 I 2 a 22 ' ; (10) 13 83895 ' ' причому коефіцієнти a11 , й a22 визначаються через коефіцієнти рівняння (8): a11' = a12 sin 2 j + 1 (a11 - a 22 )cos 2j + 1 (a11 + a22 ); 2 2 a22' = - a12 sin 2j - 1 (a11 - a22 ) cos2j + 1 (a11 + a 22); 2 2 (11) де параметр j визначається також через коефіцієнти рівняння (8) із рівняння: (12) ctg2j = (a11 - a 22 ) / 2a12 ; Величини I2, I3 є інваріантами рівняння лінії другого порядку і визначаються через коефіцієнти рівняння (8) із співвідношення; a11 a12 a13 a11 a12 (13) I2 = ; I = a12 a 22 a23 ; a12 a22 3 a13 a 23 a33 Наведені вище формули описують алгоритм роботи апаратно-програмного блока 3, який може бути виконаний на основі однокристального мікроконтролера, або пристрою, який містить мікропроцесор та достатній об'єм пам'яті та призначений для виконання програм користувача. Це може бути мобільний телефон, кишеньковий персональний комп'ютер, ноутбук, персональний комп'ютер та інше. Формувач 1 зображення може бути виконаний у вигляді телекамери, веб-камери, відеокамери, цифрової фо токамери. Формувач 2 двох сві тлових площин може бути виконаний у вигляді двох лазерних генераторів лінії (світлових площин). Одним із варіантів виконання формувача двох світлови х площин може бути генератор одної світлової площини (лазерний генератор лінії), яка має наперед задану і відому товщин у площини (лінії). В цьому випадку передній фронт площини (лінії) використовують як першу світлову площину, а задній фронт, як другу світлову площину. Функції блоків 1, 3, 4 можуть виконуватись одним комбінованим пристроєм з достатньою обчислювальною потужністю та вбудованим пристроєм формування зображення, наприклад, мобільним телефоном з вбудованою фотокамерою, або кишеньковим персональним комп'ютером з вбудованою фотокамерою. Блок індикації може бути як окремим індикатором, так і вбудованим дисплеєм в один з вище перерахованих блоків. Блок-схема оптико-електронного пристрою для обчислення зовнішнього діаметру тр уби циліндричної форми, яка подана на фігурі 5, відрізняється від пристрою на фігурі 1 тим, що використовується тільки одна світлова площина, а апаратнопрограмний блок проводить обчислення значення півосей еліпса, фрагмент якого фіксується на фотосенсорі формувача 1 зображення, наступним чином: підставляємо в рівняння (9) координати довільних п'яти точок, які належать фрагментові еліпса на фотосенсорі формувача 1 зображення, визначаємо коефіцієнти рівняння (8), після чого визначаємо півосі а, b шуканого нами еліпса по ' ' формулах (10), причому коефіцієнти a11 , a22 визначаються через коефіцієнти рівняння (8) по формулах (11), параметр φ визначається також 14 через коефіцієнти рівняння (8) із рівняння (12). Величини l2, l3 є інваріантами рівняння лінії другого порядку і визначаються через коефіцієнти рівняння (8) із співвідношення (13). За діаметр труби приймається значення меншої із двох обчислених півосей еліпса. Оптико-електронний пристрій для обчислення товщини зовнішнього та внутрішнього діаметрів труби циліндричної або еліптичної форми в перерізі, поданий на фігурі 6, відрізняється від пристрою на фігурі 1 тим, що додатково містить безконтактний імпульсний нагрівач 6 заданої точки поверхні труби, формувач 7 зображення поверхні труби в інфрачервоному діапазоні випромінювання, другий апаратно-програмний блок 8, вхід котрого підключений до виходу формувача 7 інфрачервоного зображення, а вихід котрого підключений до входу блоку 4 індикації результатів та ви ходу першого апаратно-програмного блоку. Нехай нагрівач 6 виконаний у вигляді лазера достатньої для нагрівання поверхні труби потужності. Перше теплове зображення поверхні труби фіксується формувачем 7 інфрачервоного зображення та передається в другий апаратнопрограмний блок 8 до генерування теплового імпульсу і вважається фоновим. Лазер генерує тепловий імпульс заданої тривалості, який нагріває задану точку на поверхні труби до деякої температури. Формувач 7 інфрачервоного зображення фіксує теплові зображення поверхні труби в точці нагрівання через наперед задані проміжки часу Рn1 де n - скінчене ціле число, і передає отримане зображення в другий апаратно-програмний блок 8. Блок 8 фіксує значення яскравості заданої точки на тепловому зображенні в момент часу Рn-1 та віднімає від нього значення фонової яскравості в цій же точці, зафіксоване на першому тепловому зображенні. Різницеве значення яскравості підставляється в функціональну залежність між товщиною стінки труби та різницевими значеннями яскравостей, яку наперед встановлюють експериментальним або розрахунковим шляхом. Встановлення багатомірної функціональної залежності товщини стінки труби від значення яскравостей (температур) попередньо нагрітої точки на поверхні труби, швидкість зміни температури якої буде залежати від товщини труби та зовнішньої температури середовища, можна встановити експериментальним шляхом за допомогою нагрівання поверхні труб з різною товщиною стінки при різних температурах зовнішнього середовища. Отриманий масив дискретних результатів апроксимується за допомогою багатомірної функції з наперед заданою точністю, яка потім використовується при проведенні вимірювань товщини стінки труби. Таким чином визначають товщину стінки труби. Внутрішній діаметр труби визначають як різницю між зовнішнім діаметром труби та подвійною товщиною стінки труби. Технічний результат, отриманий за допомогою запропонованого винаходу, полягає у наступному. По-перше, найближчий аналог може бути застосований до вимірювання розмірів циліндричних або еліпсоподібних труб, але це буде здійснюватись неоптимальним методом та відповідно неоп 15 83895 тимальними засобами. Найближчий аналог вимагає, щоб світлова площина направлялась на об'єкт вимірювання під відомим кутом. Якщо об'єкт вимірювання буде змінювати своє положення в просторі відносно світлової площини, то отримані результати будуть неправильними. Пристрій відповідно до запропонованого винаходу дозволяє довільне розташування світлової площини відносно положення труби при умові паралельного розташування матриці фотосенсора та світлової площини. Це дає можливість проводити обчислення параметрів труб, які змінюють своє положення під час тривалих багатократних вимірювань, або можуть вібрувати. Це також дає можливість не проводити точну інсталяцію вимірювального пристрою відносно положення труби, або створити портативний переносний пристрій, а також не проводити періодичну повірку взаємного положення вимірювального пристрою та труби. По-друге, найближчий аналог використовує для визначення форми та розмірів опуклостей на поверхні деталей кузова автомобіля обчислення їх просторових координат з наступним їх наближенням поліномом степеня n по методу найменших квадратів. Такий методологічний підхід зобумовив відповідну конструкцію обчислювальних блоків найближчого пристрою-аналога. В запропонованому нами пристрої для обчислення параметрів труби проводиться визначення планарних координат світлових кривих на матриці фотосенсора та їх обробка відповідно до запропонованого вище методу обчислення півосей еліпса. Тому в запропонованому пристрої використовуються принципово інші обчислювальні блоки, які дають можливість при менших програмно-апаратних затратах та більшій швидкодії отримувати безпосереднє значення діаметра труби циліндричної форми, або значення півосей еліпса для труби з еліптичною формою перерізу. Ми хочемо підкреслити, що метод обчислення півосей еліпса принципово відрізняється від будь-якого методу апроксимації по ряду можливостей, наприклад, на відміну від будьякого апроксимаційного методу він є завадостійкий, тобто дає можливість обчислити розміри півосей еліпса при наявності поверхневих дефектів за рахунок багаторазового обчислення півосей еліпса з використанням різних точок світлової кривої на матриці фотосенсора з наступною статистичною обробкою отриманих результатів, яка дає можливість визначити, які півосі належать недеформованій поверхні труби, а які - дефектній частині поверхні, при умові, що недеформована поверхня труби має значно більші розміри, ніж дефектна поверхня. Крім того, введення другої світлової площини дає можливість обчислювати розміри труб з еліпсоподібним перерізом, що виникає при технологічних відхиленнях в процесі виготовлення труб, або після їх тривалої експлуатації. Крім того, запропонований пристрій дає можливість обчислювати внутрішній діаметр труби безпосередньо прямим методом або непрямим методом при використанні блоків вимірювання товщини стінки труби. 16 Також запропонований пристрій дає можливість вимірювання товщини стінки труби, а також додаткового обчислення непрямим методом внутрішнього або зовнішнього діаметрів труби. До опису додається шість креслень. На фігурі 1 наведено оптико-електронний пристрій для обчислення параметрів циліндричної або еліптичної в перерізі труби, який складається з формувача 1 зображення, формувача 2 світлових площин, апаратно-програмного модуля 3, а також блока 4 індикації отриманих результатів, причому формувач 2 спрямовує світлові площини на трубу 5. На фігурі 2 подано фрагмент оптикоелектронного пристрою для обчислення зовнішнього діаметра труби циліндричної або еліптичної форми в перерізі, який містить формувач 1 зображення та формувач 2 світлових площин, які спрямовані на трубу 5. На фігурі 3 зображено блок-схему оптикоелектронного пристрою для випадку обчислення внутрішнього діаметру труби циліндричної або еліптичної форми, який складається з формувача 1 зображення, формувача 2 світлови х площин, апаратно-програмного модуля 3, а також блока 4 індикації отриманих результатів, причому формувач 2 спрямовує світлові площини на тр убу 5. Дане креслення подане для того, щоб показати можливість застосування одного і того ж пристрою для вимірювання як зовнішнього, так і внутрішнього діаметрів труби. На фігурі 4 подано зображення на матриці фотосенсора формувача 1 зображення для випадку вимірювання зовнішнього діаметру труби, якому відповідають фігура 1 та фігура 2. На фігурі 5 поданий пристрій для обчислення зовнішнього діаметра циліндричної труби, що є частковим випадком пристрою для обчислення параметрів труби з циліндричною або еліптичною формою перерізу, який складається з формувача 1 зображення, формувача 2 світлової площини, апаратно-програмного модуля 3, а також блока 4 індикації отриманих результатів. На фігурі 6 подано оптико-електронний пристрій для обчислення товщини та параметрів перерізу тр уби циліндричної або еліптичної форми в перерізі, який складається з формувача 1 зображення, формувача 2 світлови х площин, першого апаратно-програмного блока 3, а також блока 4 індикації отриманих результатів, безконтактного імпульсного нагрівача 6 заданої точки на поверхні труби, др угого апаратно-програмного блока 7, формувача 8 зображення поверхні труби в інфрачервоному діапазоні випромінювання. Список літератури. 1. Non-contact measuring device // International Class: G01B11/08. /Патент США №5175595 від 29.12.1992p. 2. Method and system for measuring characteristics of curved features //International Class: G06K009/36. /Патент США №6724947 від 20.04.2004p. 3. System for measuring shapes and dimensions of gaps and flushnesses on three dimensional surfaces of objects //International Class: G06K009/00. /Патент США №5129010 від 07.07.1992p. 17 4. Non-contact dimensional gage for turned parts //International Class: G01J03/45. /Патент США №4880991 від 14.11.1989р. 83895 18 5. Apparatus for measuring elongate objects //International Class: G01B11/10. /Патент Великобританії №GB2257512 від 13.01.1993p. 6. Ильин Β.Α., Позняк Э.Г. Аналитическая геометрия. -М.: Наука, 1999.- 224с. 19 83895 20 21 Комп’ютерна в ерстка Л.Литв иненко 83895 Підписне 22 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and optical-electronic device for calculation of parameters of tube (variants)
Автори англійськоюHaponiuk Yaroslav Vasyliovych, Vorobel Roman Antonovych
Назва патенту російськоюСпособ и оптико-электронное устройство для вычисления параметров трубы (варианты)
Автори російськоюГапонюк Ярослав Васильевич, Воробель Роман Антонович
МПК / Мітки
МПК: G01B 11/08, G01B 11/30
Мітки: спосіб, трубі, пристрій, параметрів, варіанти, обчислення, оптико-електронний
Код посилання
<a href="https://ua.patents.su/11-83895-sposib-ta-optiko-elektronnijj-pristrijj-dlya-obchislennya-parametriv-trubi-varianti.html" target="_blank" rel="follow" title="База патентів України">Спосіб та оптико-електронний пристрій для обчислення параметрів труби (варіанти)</a>
Оптико-електронний пристрій вимірювання показника заломлення та оптичної густини середовищ
Номер патенту: 19726
Опубліковано: 15.12.2006
Автори: Білинський Йосип Йосипович, Гладишевський Володимир Романович
МПК: G01N 21/41
Мітки: оптико-електронний, вимірювання, густини, показника, оптично, середовищ, пристрій, заломлення
Формула / Реферат:
Оптико-електронний пристрій вимірювання показника заломлення та оптичної густини середовищ, що містить джерело світла, плоский світловод, що має пристрій введення на вільній від контакту з контрольованим середовищем поверхні плоского світловода, який відрізняється тим, що в нього введені об’єктив, вхід якого оптично зв’язаний з виходом джерела світла, пристрій введення, вихід якого оптично зв’язаний з виходом об’єктива, що знаходиться на...
Спосіб вимірювання кутів повороту контрольованого об’єкта відносно базового напрямку і оптико-електронний пристрій для його реалізації
Номер патенту: 79154
Опубліковано: 25.05.2007
Автори: Пасько Ігор Матвійович, Гринюк Ігор Євгенович, Голік Марат Миколайович, Брух Георгій Андрійович, Титаренко Іван Титович
МПК: G01B 11/26, G01B 21/22
Мітки: контрольованого, реалізації, спосіб, оптико-електронний, об'єкта, пристрій, напрямку, кутів, вимірювання, повороту, відносної, базового
Формула / Реферат:
1. Спосіб вимірювання кутів повороту контрольованого об'єкта відносно базового напрямку, в якому розміщують на контрольованому об'єкті один з відбивачів світла, формують по черзі за допомогою принаймні двох джерел світла в площині, паралельній площині вимірювання, принаймні два світлових пучки, направляють пучки світла на відбивачі світла, освітлюють пучками світла різні ділянки одного об’єктива вимірювального приладу, формують по черзі...
Оптико-електронний пристрій вимірювання витрати газу
Номер патенту: 19734
Опубліковано: 15.12.2006
Автор: Білинський Йосип Йосипович
МПК: G01N 21/41
Мітки: оптико-електронний, витрати, вимірювання, пристрій, газу
Формула / Реферат:
Оптико-електронний пристрій вимірювання витрати газу, що містить джерело випромінювання, вихід якого оптично зв'язаний з напівпрозорою пластиною, дзеркало, як ємність із досліджуваним середовищем використано трубопровід із газом, виконаний із двома розташованими за напрямком потоку отворами, який відрізняється тим, що в нього введено звужувальний пристрій, розташований у трубопроводі між отворами, дві прозорі кювети, що накривають герметично...
Оптико-електронний пристрій дослідження дна ока
Номер патенту: 15907
Опубліковано: 17.07.2006
Автори: Білинський Йосип Йосипович, Бабій Артем Олександрович, Салдан Йосип Романович
МПК: A61B 3/06
Мітки: дна, оптико-електронний, дослідження, ока, пристрій
Формула / Реферат:
Оптико-електронний пристрій дослідження дна ока, який містить джерело світла, оптичну систему, світловод, який відрізняється тим, що в нього введено фотошар, фотоматрицю, щонайменше чотири світлодіоди, рідинно-кристалічний дисплей, мікропроцесорну систему, блок цифро-аналогових перетворювачів, електронний блок керування, причому вихід фотошару оптично зв'язаний з входом світловоду, вихід світловоду оптично зв'язаний з входом оптичної системи,...
Оптико-електронний вимірювальний пристрій
Номер патенту: 49358
Опубліковано: 15.06.2004
Автори: Голик Марат Миколаєвич, Титаренко Іван Титович, Брух Георгій Андрійович, Пасько Ігор Матвійович, Гринюк Ігор Євгенович
МПК: G01B 11/00
Мітки: пристрій, вимірювальний, оптико-електронний
Формула / Реферат:
1. Оптико-електронний вимірювальний пристрій, який містить оптично з’єднані джерело світла, світлоподільник, об’єктив, відбивач, фотоприймач, електрично з’єднаний з ним через підсилювач, електронний блок і генератор, електрично з’єднаний з джерелом світла, який відрізняється тим, що відбивач виконано у вигляді жорстко з’єднаних між собою трьох відбивних взаємно перпендикулярних дзеркал, у світловий пучок між об’єктивом і відбивачем введено...
Попередній патент: Шатун двигуна внутрішнього згоряння або компресора
Наступний патент: Інструмент профілезгинального стана
Випадковий патент: Спосіб одержання покритих оболонкою таблеток кардіотонічного лікарського препарату