Моноімпульсний пошуково-вимірювальний пеленгатор
Номер патенту: 87074
Опубліковано: 10.06.2009
Автори: Чигирин Олег Трохимович, Покришевський Віктор Михайлович, Тітов Валерій Сергійович, Стеріополо Євген Анатолійович

Формула / Реферат
Моноімпульсний пошуково-вимірювальний пеленгатор, який складається з першого, другого і третього блоків запам'ятовування, блока віднімання, блока ділення, першого і другого дешифраторів, першого і другого наборів блоків запам'ятовування, першого, другого і третього наборів блоків І, першого блока АБО, генератора імпульсів, блока І, лічильника імпульсів, блока порівняння, лічильника тактів, приводу антени, блока визначення кутових координат, у якому перший вихід першого блока запам'ятовування підключений до першого входу блока визначення кутових координат і першого входу блока віднімання, другий вхід і вихід якого підключені відповідно до другого виходу першого блока запам'ятовування і першого входу блока ділення, перший і другий виходи другого блока запам'ятовування підключені відповідно до другого входу блока ділення і третього входу блока визначення кутових координат, вихід блока ділення підключений до першого дешифратора, виходи блоків запам'ятовування першого набору блоків запам'ятовування підключені до перших (інформаційних) входів блоків І першого набору блоків І, другий і третій (керуючі) входи блоків І першого набору блоків І підключені до відповідних виходів першого і другого дешифраторів, вихід генератора імпульсів через перший (інформаційний) вхід блока І підключений до першого (рахункового) входулічильника імпульсів, вихід якого і вихід третього блока запам'ятовування підключені відповідно до першого і другого входів блока порівняння, вихід якого підключений до другого (нульового) входу лічильника імпульсів і входу лічильника тактів, вихід якого підключений до входу другого дешифратора, виходи блоків І першого набору блоків І підключені до входів першого блока АБО, вихід якого підключений до другого входу блока визначення кутових координат, вихід якого підключений до входу приводу антени і перших (інформаційних) входів блоків І другого набору блоків І, виходи блоків І другого набору блоків І і виходи другого дешифратора підключені відповідно до перших (інформаційних) входів блоків І третього набору блоків І і до других (керуючих) входів блоків І третього набору блоків І, виходи блоків І третього набору блоків І підключені до відповідних блоків запам'ятовування другого набору блоків запам'ятовування, другий (керуючий) вхід першого блока І, перший і другий входи першого блока запам'ятовування підключені відповідно до першого, другого і третього входів моноімпульсного пошуково-вимірювального пеленгатора, який відрізняється тим, що в нього введені двопроменева антена, перший і другий блоки підсилення і визначення сигналу, другий блок АБО, перший і другий вимірювачі амплітуди, блок визначення величини знака відхилення цілі від рівносигнального напрямку, блок суматорів, при цьому вихід (електромеханічний) приводу антени підключений до першого входу двопроменевої антени, перший і другий виходи якої підключені відповідно до входів першого і другого блоків підсилення і визначення сигналу, другі виходи яких через другий блок АБО підключені до других (керуючих) входів блоків І другого набору блоків І, перші виходи першого і другого блоків підсилення і визначення сигналу підключені відповідно до входів першого і другого вимірювачів амплітуди, виходи яких підключені відповідно до першого і другого входів блока визначення величини і знака відхилення цілі від рівносигнального напрямку, перший ("+"), другий ("–"), третій ("DП") виходи якого і виходи блоків запам'ятовування другого набору блоків запам'ятовування підключені відповідно до першого ("+"), другого ("–"), третього ("DП") і четвертих входів блока суматорів, другий вхід двопроменевої антени і вихід блока суматорів підключені відповідно до четвертого входу і виходу моноімпульсного пошуково-випромінювального пеленгатора.
Текст
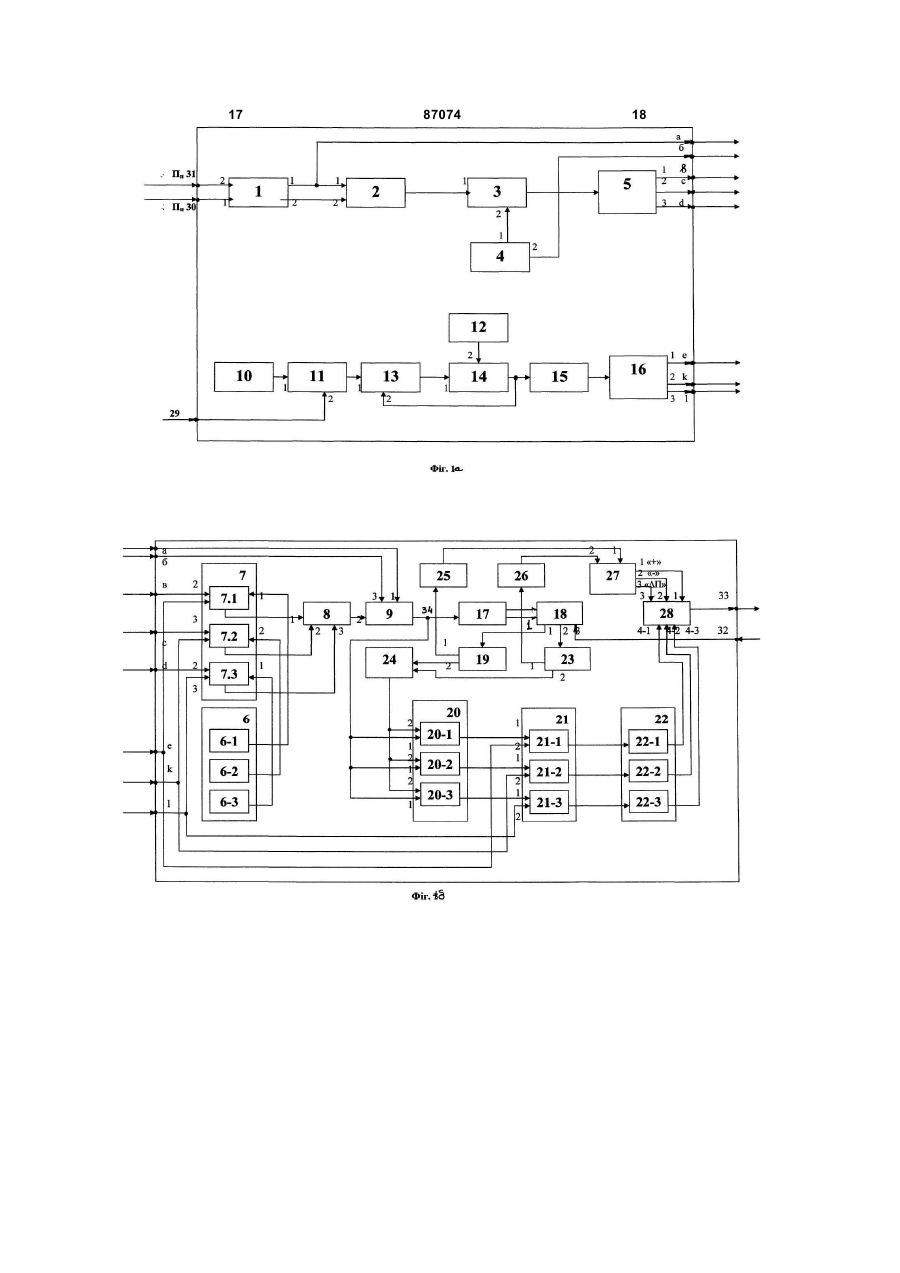
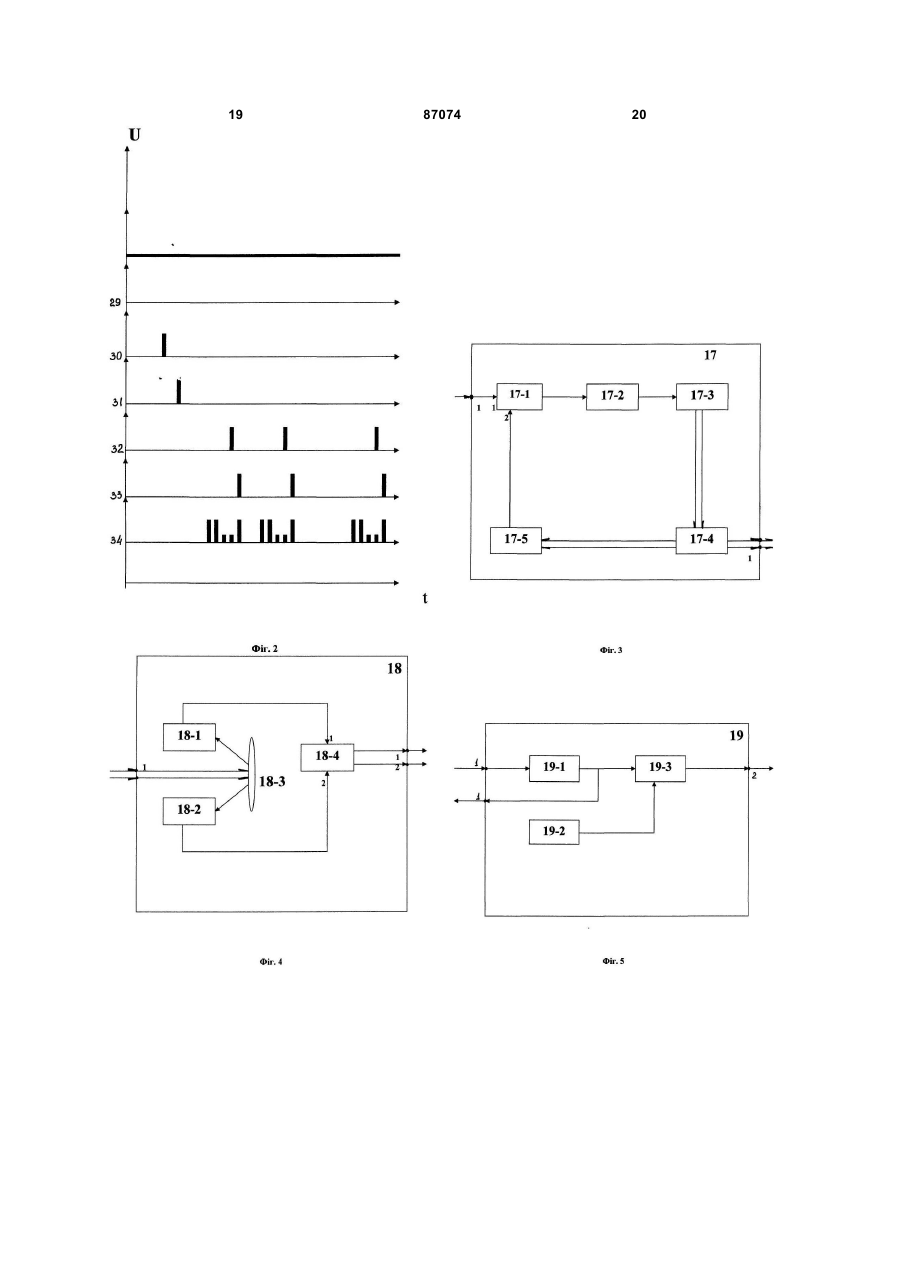
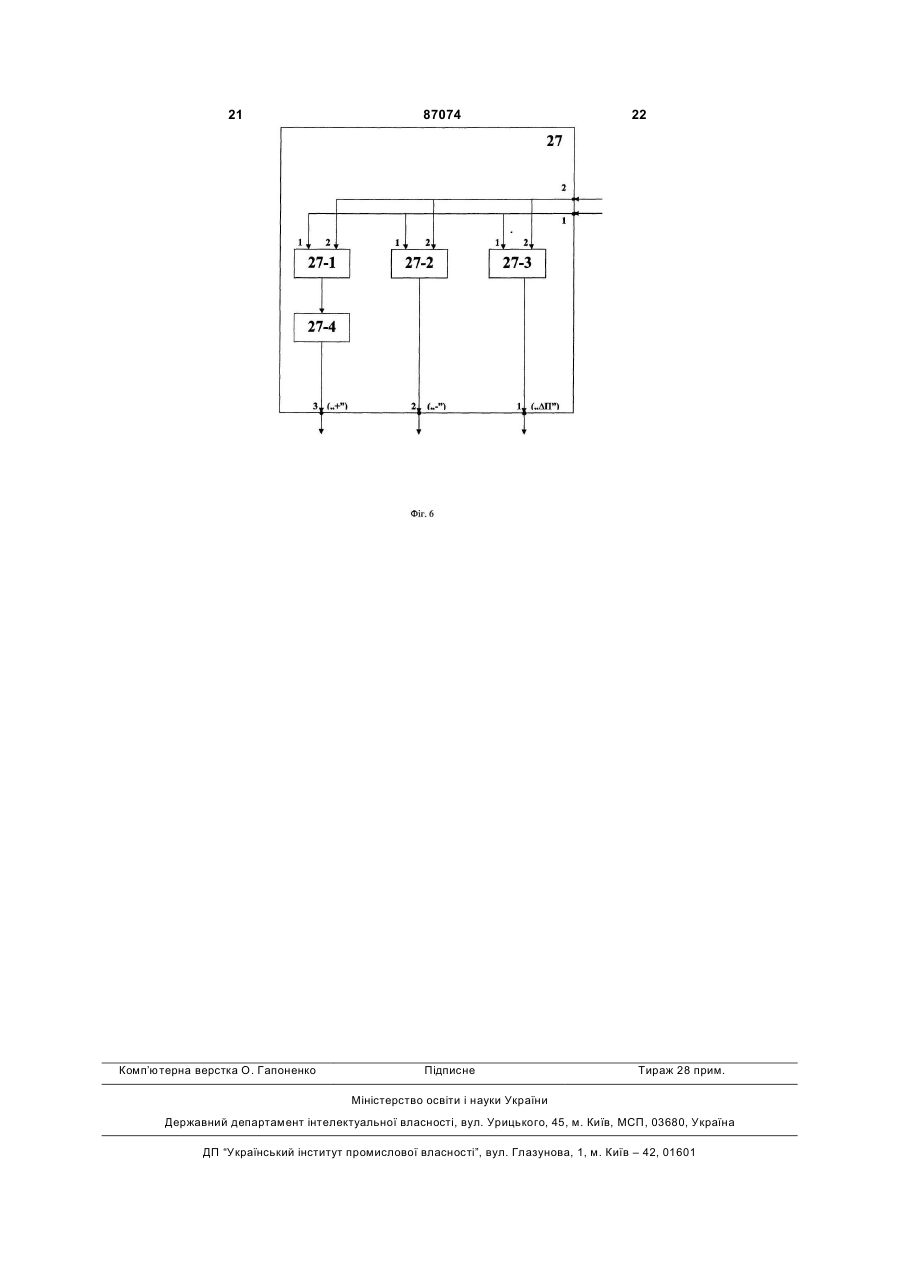
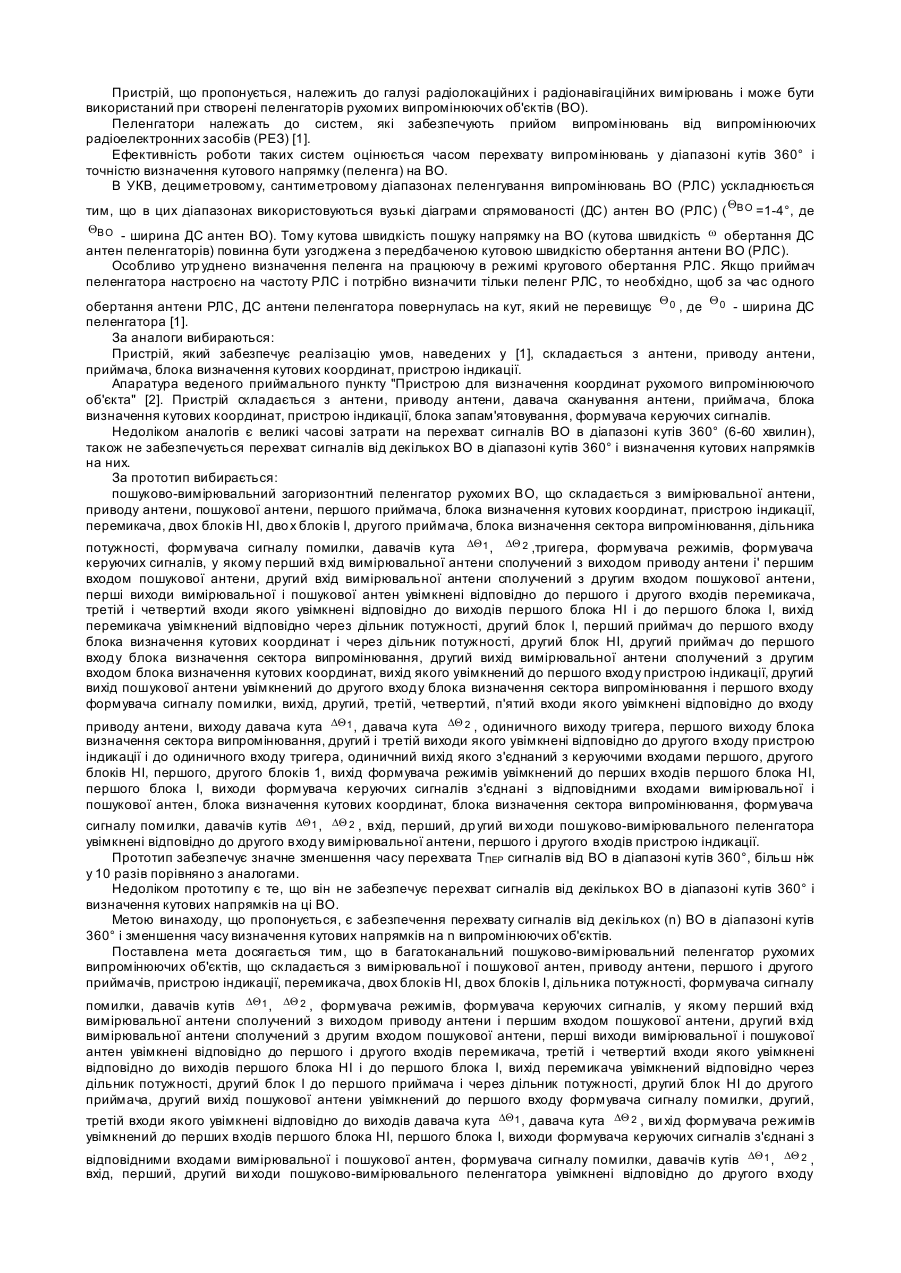
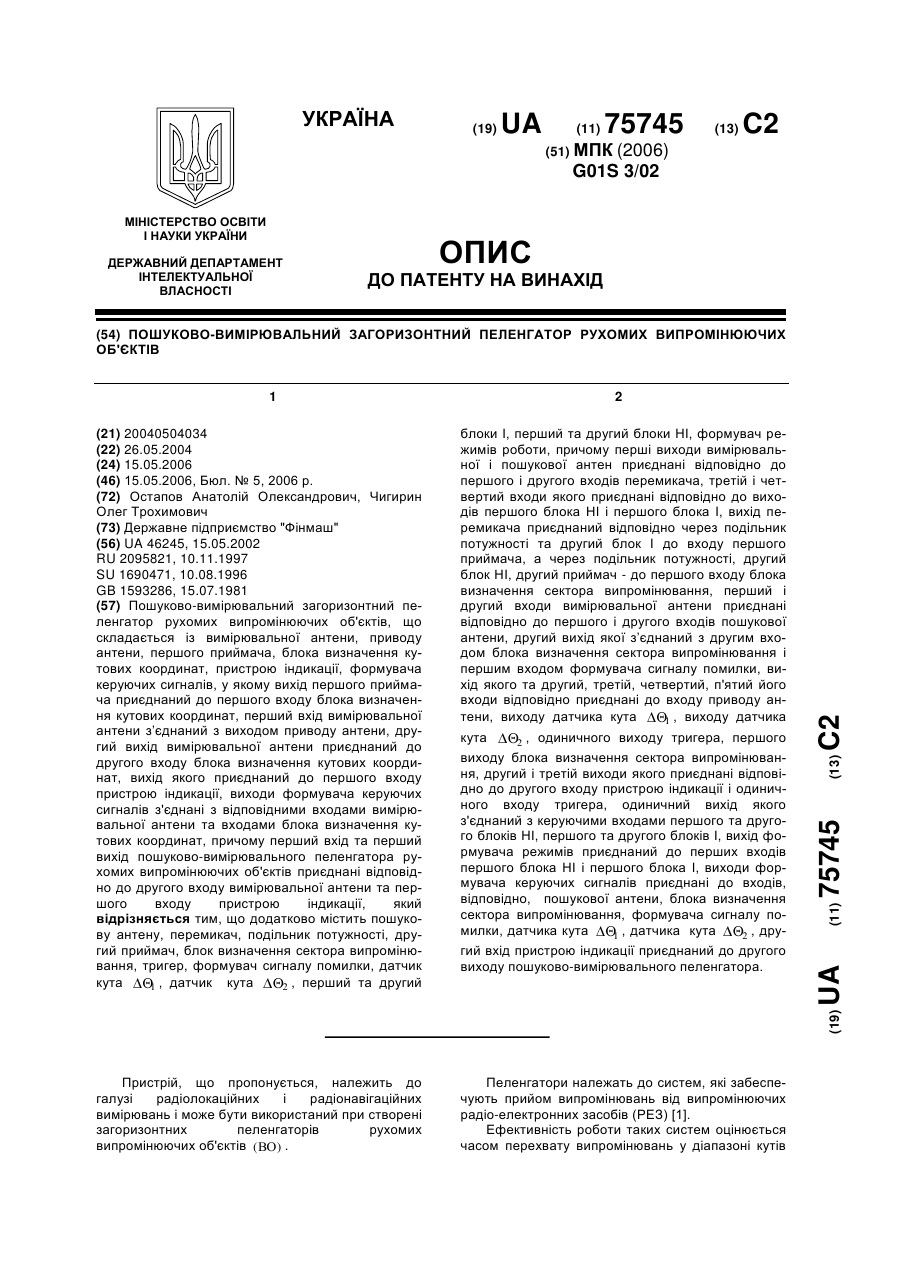
Моноімпульсний пошуково-вимірювальний пеленгатор, який складається з першого, другого і третього блоків запам'ятовування, блока віднімання, блока ділення, першого і другого дешифраторів, першого і другого наборів блоків запам'ятовування, першого, другого і третього наборів блоків І, першого блока АБО, генератора імпульсів, блока І, лічильника імпульсів, блока порівняння, лічильника тактів, приводу антени, блока визначення кутових координат, у якому перший вихід першого блока запам'ятовування підключений до першого входу блока визначення кутових координат і першого входу блока віднімання, другий вхід і вихід якого підключені відповідно до другого виходу першого блока запам'ятовування і першого входу блока ділення, перший і другий виходи другого блока запам'ятовування підключені відповідно до другого входу блока ділення і третього входу блока визначення кутових координат, вихід блока ділення підключений до першого дешифратора, виходи блоків запам'ятовування першого набору блоків запам'ятовування підключені до перших (інформаційних) входів блоків І першого набору блоків І, другий і третій (керуючі) входи блоків І першого набору блоків І підключені до відповідних виходів першого і другого дешифраторів, вихід генератора імпульсів через перший (інформаційний) вхід блока І підключений до першого (рахункового) входу лічильника імпульсів, вихід якого і вихід третього блока запам'ятовування підключені відповідно до першого і другого входів блока порівняння, вихід якого підключений до другого (нульового) входу лічильника імпульсів і входу лічи 2 (19) 1 3 Винахід належить до галузі радіолокаційних і радіонавігаційних вимірювань і може бути застосований при створенні пеленгаторів об'єктів імпульсного випромінювання (ОІВ) для одночасного визначення кутових напрямків на кожен з декількох ОІВ, розміщених у просторі в межах головного пелюстка пеленгаційної антени. У відомих пристроях є низка недоліків, які не дозволяють проводити пошук ОІВ з одночасним вимірюванням кутових напрямків на декілька ОІВ, які розміщені у просторі в межах головного пелюстка пеленгаційної антени, з належною ефективністю. Як перший відомий пристрій-аналог обрана апаратура веденого приймального пункту, який входить до складу пристрою для визначення координат рухомого випромінюючого об'єкта, наведеного в описі до патенту України на винахід №46245, МПК G01S3/02, 5/04, опубл. у Бюл. №11, 2004 р. [1]. У зазначеному відомому пристрої кутовий напрямок на ОІВ визначають за рахунок послідовної обробки у часі імпульсних сигналів ОІВ, прийнятих за декілька сканувань антени у секторі пошуку. Антена переміщується з постійною кутовою швидкістю, змінюючи напрямок руху на краях сектору пошуку. Перший відомий пристрій-аналог містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, блок запам'ятовування, формувач керуючих сигналів, у якому перший вхід антени через привід антени з'єднаний з першим виходом датчика сканування антени, перший вихід антени через приймач підключений до першого входу блока визначення кутових координат, другий вихід антени підключений до першого входу датчика сканування антени і до другого входу блока визначення кутових координат, третій вхід, четвертий, перший та другий виходи якого підключені відповідно до другого виходу та другого входу датчика сканування антени, до першого та другого входів пристрою індикації, третій вхід якого підключений до третього входу датчика сканування антени та виходу блока запам'ятовування, виходи формувача керуючих сигналів веденого приймального пункту з'єднані з відповідними входами датчика сканування антени, блока визначення кутових координат, блока запам'ятовування і пристрою індикації, причому перший, другий входи, перший і другий виходи веденого приймального пункту підключені відповідно до першого входу блока запам'ятовування, другого входу антени та другого виходу блока визначення кутових координат, третього виходу блока визначення кутових координат. Недоліки першого відомого аналога: 1. Збільшення часу вимірювання і величини похибки вимірювання кутового напрямку на ОІВ, яке зумовлене: - зростанням ширини діаграми спрямованості (ДС) антени до величини 8-20° при зменшенні несучої частоти ОІВ, наприклад, до 900-400МГц; 87074 4 - зміною у часі режиму випромінювання ОІВ. Тривалість інтервалів часу, протягом яких випромінюються сигнали ОІВ, змінюються на іншу тривалість інтервалів часу, протягом яких сигнали ОІВ не випромінюються („паузний" режим випромінювання ОІВ). Тривалість інтервалів випромінювання і невипромінювання може змінюватись у часі на значні величини. 2. Формування „хибних" (несправжніх) цілей, коли параметри сигналів ОІВ змінюються лише за одним з параметрів (наприклад, за несучою частотою ОІВ, тривалістю імпульсу, частотою (або періодом) повторення імпульсів тощо). 3. Низька ймовірність виявлення випромінювань ОІВ у заданому кутовому секторі Dс в площині сканування (горизонтальній), або значна величина часу перехоплення випромінювань ОІВ у заданому кутовому секторі. Наприклад, для початкових умов q0=4о, Т0=5с, wпр=1%, Dс=30°, де q0 - ширина діаграми спрямованості пеленгатора на рівні половинної величини потужності, Т0 - період сканування антени ОІВ, wпр - кутова швидкість антени пеленгатора, Dс - сектор сканування антени пеленгатора, ймовірність визначення сигналів ОІВ (Р) дорівнює - Ρ=0,8. За два сканування антени пеленгатора в секторі Dс=30° ймовірність визначення сигналів ОІВ для наведених вище умов (Р2) збільшується до (Р2)=0,96 за час 60с. Ймовірність Р2 визначають згідно з формулою: Р2=1-(1-Р1)(1-Р2), де P1, Р2 - ймовірності визначення (пошуку) сигналів відповідно при першому і другому скануванні антени пеленгатора. Як пристрій-прототип авторами обраний „Пасивний пеленгатор", який наведений у заявці на одержання патенту України на винахід №а200708825 від 31.07. 2007р. авторів А.О. Остапова і О.Т. Чигирина [2]. Пристрій-прототип забезпечує високу ймовірність (Р³0,9) пошуку сигналів ОІВ у заданому кутовому секторі Dс. У пристрої-прототипі антена пеленгатора перемішується у площині сканування з нерівномірною кутовою швидкістю. Антена пеленгатора послідовно займає такі кутові положення, що суміжні по відношенню до них кутові положення антени відрізняються на кут q0, який визначають згідно з формулою: П0і=Пп+i·q0, де Пп - початковий кут заданого кутового сектора Dс, q0 - ширина ДС антени пеленгатора на рівні половинної величини потужності, і - ціле число (0, 1, 2,....), яке дорівнює кількості кутових положень антени пеленгатора відносно початкового кута Пп. У кожному кутовому положенні антена пеленгатора утримується протягом часу (tсп), при цьому tсп³Т0, де Т0 - період сканування антени ОІВ. 5 87074 6 потужності, яка перевищує потужність сигналу на Пристрій-прототип містить перший, другий і рівні половинної потужності. третій блоки запам'ятовування, блок віднімання, Величина похибки зростає за рахунок зросблок ділення, перший і другий дешифратори, пертання ширини ДС антени пеленгатора при зменший і другий набори блоків запам'ятовування, пешення несучої частоти ОІВ. Наприклад, при викорший, другий і третій набори блоків І, блок АБО, ристанні в пеленгаторі антени постійних генератор імпульсів, блок І, лічильник імпульсів, геометричних розмірів, максимальна величина блок порівняння, лічильник тактів, високочастотну похибки визначення першого напрямку дорівнює антенну систему, привід антени, блок визначення (8-30)° для частот (900-400)МГц. сигналів, блок визначення кутових координат, у 2. Формування „хибних" (несправжніх) цілей за якому перший вихід першого блока запам'ятовуумов зміни параметрів сигналів ОІВ лише по одвання підключений до першого входу блока визнаному з параметрів (наприклад, несуча частота чення кутових координат і першого входу блока ОІВ, тривалість імпульсу, частота або період повіднімання, другий вхід і вихід якого підключені вторення імпульсів). відповідно до другого виходу першого блока запаУ пристрої-прототипі кутовий напрямок на ОІВ м'ятовування і першого входу блока ділення, первизначається значенням кутового напрямку, який ший і другий виходи другого блока запам'ятовувиробляється у блоці визначення кутових коордивання підключені відповідно до другого входу нат. блока ділення і третього входу блока визначення Завданням винаходу є зменшення похибки викутових координат, вихід блока ділення підключезначення кутового напрямку на ОІВ, а також заний до входу першого дешифратора, виходи блобезпечення відсутності формування хибних цілей ків запам'ятовування першого набору блоків запаза умов, коли параметри сигналів ОІВ змінюються м'ятовування підключені до перших лише за одним з параметрів (наприклад, зміню(інформаційних) входів блоків І першого набору ється лише несуча частота, або лише тривалість блоків І, другий і третій (керуючі) входи блоків І імпульсу, лише частота (або період) повторення першого набору блоків І підключені до відповідних імпульсів. виходів першого і другого дешифраторів, вихід Виконання поставленого завдання досягаєтьгенератора імпульсів через перший (інформаційся завдяки тому, що в моноімпульсний пошуковоний) вхід блока І підключений до першого (рахунвимірювальний пеленгатор, який складається з кового) входу лічильника імпульсів, вихід якого і першого, другого і третього блоків запам'ятовувихід третього блока запам'ятовування підключені вання, блока віднімання, блока ділення, першого і відповідно до першого і другого входів блока порідругого дешифраторів, першого і другого наборів вняння, вихід якого підключений до другого (нублоків запам'ятовування, першого, другого і трельового) входу лічильника імпульсів і входу лічитього наборів блоків І, першого блока АБО, генельника тактів, вихід якого підключений до входу ратора імпульсів, блока І, лічильника імпульсів, другого дешифратора, виходи блоків І першого блока порівняння, лічильника тактів, приводу аннабору блоків І підключені до входів блока АБО, тени, блока визначення кутових координат, у яковихід якого підключений до другого входу блока му перший вихід першого блока запам'ятовування визначення кутових координат, вихід якого підклюпідключений до першого входу блока визначення чений до входу приводу антени і до перших (інфокутових координат і першого входу блока віднірмаційних) входів блоків І другого набору блоків І, мання, другий вхід і вихід якого підключені відповідругі керуючі входи блоків І другого набору блоків І дно до другого виходу першого блока запам'ятопідключені до виходу блока визначення сигналів, вування і першого входу блока ділення, перший і виходи блоків І другого набору блоків І і виходи другий виходи другого блока запам'ятовування другого дешифратора підключені відповідно до підключені відповідно до другого входу блока діперших (інформаційних) входів блоків І третього лення і третього входу блока визначення кутових набору блоків І і до других (керуючих) входів блокоординат, вихід блока ділення підключений до ків І третього набору блоків І, виходи блоків І тревходу першого дешифратора, виходи блоків запатього набору блоків І підключені до відповідних м'ятовування першого набору блоків запам'ятовублоків запам'ятовування другого набору блоків вання підключені до перших (інформаційних) вхозапам'ятовування, вихід блока визначення кутових дів блоків І першого набору блоків І, другий і третій координат підключений до входу приводу антени, (керуючі) входи блоків І першого набору блоків І вихід (електромеханічний) якого підключений до підключені до відповідних виходів першого і другопершого входу високочастотної антенної системи, го дешифраторів, вихід генератора імпульсів чевихід якої підключений до входу блока визначення рез перший (інформаційний) вхід блока І підклюсигналів, другий (керуючий) вхід блока І, перший і чений до першого (рахункового) входу лічильника другий входи першого блока запам'ятовування, імпульсів, вихід якого і вихід третього блока западругий вхід високочастотної антенної системи, м'ятовування підключені відповідно до першого і виходи блоків запам'ятовування другого набору другого входів блока порівняння, вихід якого підблоків запам'ятовування підключені відповідно до ключений до другого (нульового) входу лічильника першого, другого, третього, четвертого входів і імпульсів і входу лічильника тактів, вихід якого виходу пасивного пеленгатора. підключений до входу другого дешифратора, виНедоліки пристрою-прототипу: ходи блоків І першого набору блоків І підключені 1. Значна величина похибки кутового напрямку до входів першого блока АБО, вихід якого підклюна ОІВ, максимальне значення qm якої дорівнює чений до другого входу блока визначення кутових половині ширини ДС антени пеленгатора на рівні координат, вихід якого підключений до входу приприйому по потужності, qm - ширина ДС на рівні 7 87074 8 воду антени і до перших (інформаційних) входів На теперішній час авторам і заявнику з офіблоків І другого набору блоків І, виходи блоків І ційних джерел не відома інформація щодо викоридругого набору блоків І і виходи другого дешифрастання наведених відмінних ознак у сукупності з тора підключені відповідно до перших (інформавідомими ознаками, а також із відповідними зв'язційних) входів блоків І третього набору блоків І і до ками між ними для розв'язання поставленого видругих (керуючих) входів блоків І третього набору находом завдання. Тому запропонований винахід блоків І, виходи блоків І третього набору блоків І відповідає критеріям „новизна" і „винахідницький підключені до відповідних блоків запам'ятовування рівень", а також відповідає вимогам щодо промисдругого набору блоків запам'ятовування, другий лового застосування. (керуючий) вхід першого блока І, перший і другий Сутність винаходу пояснюється ілюстраціями, входи першого блока запам'ятовування підключені на яких наведено: відповідно до першого, другого і третього входів - на Фіг.1 (1a, 1б) - Блок-схема моноімпульсномоноімпульсного пошуково-вимірювального пелего пошуково-вимірювального пеленгатора; нгатора, введені двохпроменева антена, перший і - на Фіг.2 - Часові діаграми роботи моноімпудругий блоки підсилення і визначення сигналу, льсного пошуково-вимірювального пеленгатора; другий блок АБО, перший і другий вимірювачі ам- на Фіг.3 - Привід антени (17); плітуди, блок визначення величини і знаку відхи- на Фіг.4 - Блок-схема двохпроменевої антени лення цілі від рівносигнального напрямку, блок (18); підсумовувачів, при цьому вихід (електромеханіч- на Фіг.5 - Блок-схема блока підсилення і виний) приводу антени підключений до першого вхозначення сигнала (19, 23); ду двохпроменевої антени, перший і другий вихо- на Фіг.6 - Блок-схема блока визначення веди якої підключені відповідно до входів першого і личини і знака відхилення цілі від рівносигнальнодругого блоків підсилення і визначення сигналу, го напрямку (27). другі виходи яких через другий блок АБО підклюМоноімпульсний пошуково-вимірювальний печені до других (керуючих) входів блоків І другого ленгатор (див. Фіг.1 (1а, 1б) складається з блоків набору блоків І, перші виходи першого і другого запам'ятовування 1, 4, 12, блока віднімання 2, блоків підсилення і визначення сигналу підключені блока ділення 3, дешифраторів 5, 16, наборів бловідповідно до входів першого і другого вимірювачів ків запам'ятовування 6, 22, у складі відповідно амплітуди, виходи яких підключені відповідно до блоків запам'ятовування 6-1, 6-2, 6-3, 22-1, 22-2, першого і другого входів блока визначення вели22-3, наборів блоків І 7, 20, 21 у складі відповідно чини і знаку відхилення цілі від рівносигнального блоків І 7-1, 7-2, 7-3, 20-1, 20-2, 20-3, 21-1, 21-2, 21-3, блоків АБО 8, 24, блока визначення кутових напрямку, перший („+"), другий („-"), третій („DΠ") координат 9, генератора імпульсів 13, блока I 11, виходи якого і виходи блоків запам'ятовування лічильника імпульсів 13, блока порівняння 14, лідругого набору блоків запам'ятовування підключечильника тактів 15, приводу антени 17, двохпроміні відповідно до першого („+"), другого („-"), третьоневої антени 18, блоків відповідно підсилення і го („DΠ") і четвертих входів 4-1, 4-2, 4-3 блока підвизначення сигналу 19, 23, вимірювачів амплітуди сумовувачів, другий вхід двохпроменевої антени і 25, 26, блока визначення величини і знака відхивихід блока підсумовувачів підключені відповідно лення цілі від рівносигнального напрямку 27, піддо четвертого входу і виходу моноімпульсного сумовувача 28. Моноімпульсний пошуковопошуково-вимірювального пеленгатора. вимірювальний пеленгатор має чотири входи: відЗменшення похибки вимірювання кутового наповідно - перший 29, другий 30, третій 31, четверпрямку на ОІВ досягається за рахунок використантий 32, а також один вихід 33. ня двохканального методу вимірювання кутового Блоки запам'ятовування 1, 4, 12 (див. Фіг.1 напрямку, який забезпечує вимірювання кута на (1а)) - загальновідомі блоки цифрових і вимірюваОІВ по кожному імпульсу. льних схем [3, 4]. Відсутність формування „хибних" (несправжБлок віднімання 2 (див. Фіг.1 (1а)) - загальноніх) цілей, коли у сукупності параметрів сигналів відомий типовий блок цифрових і вимірювальних ОІВ змінюється лише один параметр (наприклад, схем [3, 4]. несуча частота, тривалість імпульсу, частота або Блок ділення 3 (див. Фіг.1 (1а)) - загальновідоперіод повторення), досягається за рахунок вимімий типовий блок цифрових і вимірювальних схем рювання кута на ОІВ по кожному імпульсу. [3, 4]. Для зменшення похибки вимірювання кута і Дешифратори 5, 16 (див. Фіг.1 (1а)) - загальзабезпечення неможливості формування „хибних" новідомі блоки цифрових схем [3]. (несправжніх) цілей, коли змінюється лише один з Набори блоків запам'ятовування 6, 22 (див. параметрів ОІВ, у моноімпульсний пеленгатор Фіг.1 (1а)) - загальновідомий типовий блок цифровведені: двохпроменева антена, два блока підсивих схем [3]. лення і визначення сигналу, блок АБО, два виміДо складу наборів блоків запам'ятовування 6, рювача амплітуди, блок визначення величини і 22 входять відповідно блоки запам'ятовування 6-1, знаку відхилення цілі від рівносигнального напря6-2, 6-3, 22-1, 22-2, 22-3, які є загальновідомими мку, підсумовувач. типовими блоками цифрових схем [3]. Саме завдяки наданню запропонованому приНабори блоків І 7, 20, 21 (див. Фіг.1 (1б)) - застрою зазначеної сукупності ознак, які його харакгальновідомі типові блоки цифрових схем [3]. теризують в усій повноті і достатності і, вступаючи До складу наборів блоків І 7, 20, 21 входять у взаємодію, забезпечують створення нових якосвідповідно блоки I 7-1, 7-2, 7-3, 20-1, 20-2, 20-3 21тей пристрою, забезпечується розв'язання поставленого винаходом завдання. 9 87074 10 1, 21-2, 21-3, які також є загальновідомими типоПереміщення (сканування) діаграми спрямовими блоками цифрових схем [3]. ваності (ДС) антени здійснюється за допомогою Блоки АБО 8, 24 (див. Фіг.1 (1б)) - загальновіелектромеханічних або електронних пристроїв. домі типові блоки цифрових схем [3]. Антену, як правило, встановлюють на двох- або Блок визначення кутових координат 9 (див. трьохкоординатних платформах з можливістю поФіг.1 (1б)) - загальновідомий типовий блок цифровороту (на Фіг.1 не ведено). вих схем [3]. На Фіг.4 наведений один з варіантів побудови Генератор імпульсів 10 (див. Фіг.1 (1б)) - загадвохпроменевої антени 18, до складу якої входять льновідомий типовий блок цифрових і вимірювадва блока опромінювачів 18-1, 18-2, антенне дзерльних схем [3, 4]. кало 18-3, двохканальний обертовий контактний Блок I 11 (див. Фіг.1 (1а)) - загальновідомий пристрій 18-4. типовий блок цифрових і вимірювальних схем [3, Сигнали високої або надвисокої частоти над4]. ходять (через вхід 1 блока 18) на антенне дзеркаЛічильник імпульсів 13 (див. Фіг.1 (1а)) - загало 18-3 (див. Фіг.1б, 4). Антенне дзеркало 18-3 льновідомий типовий блок цифрових і вимірюваопромінює опромінювачі 18-1, 18-2, на виходах льних схем [3, 4]. яких формуються дві парціальні діаграми спрямоБлок порівняння 14 (див. Фіг.1 (1а)) - загальнованості (ПДС) антени, які перетинаються. Сигнали відомий типовий блок цифрових і вимірювальних з виходів опромінювачів 18-1, 18-2 через двохкасхем [3, 4]. нальний обертовий контактний пристрій 18-4 надЛічильник тактів 15 (див. Фіг.1 (1а)) - загальноходять відповідно на перший і другий виходи анвідомий типовий блок цифрових і вимірювальних тени 18. схем [3, 4]. Таким чином, на виході блока 18 формуються Привід антени 17 (див. Фіг.1 (1б)) - загальновідві ПДС, які перетинаються. Лінія, на якій перетидомий типовий блок систем пошуку і стеження наються ПДС, є лінією рівносигнального напрямку. радіонавігаційних і радіолокаційних систем [1, 5], Антена 18 переміщується в площині сканування за який забезпечує розміщення дзеркала антени в допомогою редуктора антени, електромеханічний площині сканування і відлік кутового напрямку. зв'язок з яким надходить на перший (електромеНа Фіг.3 наведений один з варіантів побудови ханічний) вхід антени 18. блокa 17 з механічним скануванням антени в одній Блоки опромінювачів 18-1, 18-2, антенне дзерплощині. Привід антени 17 складається з блока кало 18-3, двохканальний обертовий контактний сигналу похибки 17-1, підсилювача 17-2, двигуна пристрій 18-4 є типовими загальновідомими при17-3, редуктора 17-4, датчика кутового положення строями високочастотних антенних систем [5]. антени 17-5. Блоки підсилення і визначення сигналу 19 і 23 Вхідний кодовий сигнал 1 з входу блока 17 і (див. Фіг.1 (1а, 1б)) - загальновідомі пристрої расигнал з виходу датчика кутового положення антедіолокаційних і радіонавігаційних систем [5]. ни 17-5 надходять відповідно на перший і другий На Фіг.5 наведений один з варіантів побудови входи блока сигналу похибки 17-1. Різницевий блока 19, який складається з приймача 19-1, блока сигнал з виходу блока 17-1 надходить на вхід підзапам'ятовування 19-2 і блока порівняння 19-3. силювача 17-2, підсилюється по потужності і надСигнал з першого входу блока 19 надходить на ходить на вхід двигуна 17-3. При цьому напрямок приймач 19-1, де підсилюється до потрібного рівня обертання двигуна 17-3 залежить від знака зазнапо амплітуді. Сигнал, пропорційний амплітуді вхідченого сигналу. Обертальний рух двигуна 17-3 ного сигналу, з виходу приймача 19-1 надходить через редуктор 17-4 передається на вхід (електна перший вихід блока 19 і водночас на вхід блока ромеханічний) датчика кутового положення антени порівняння 19-3. 17-5. Обертальний рух двигуна 17-3 через електЯкщо сигнал з виходу приймача 19-1 перевиромеханічний зв'язок редуктором 17-4 передаєтьщує рівень сигналу з виходу блока запам'ятовуся на вихід блока 17. Вихід блока 17 підключений вання 19-2, то спрацьовує блок порівняння 19-3, через електромеханічний зв'язок до антени 18 на виході якого виробляється керуючий сигнал, (див. Фіг.1 (1б)). При зміні знака вхідного сигналу який надходить на другий вихід блока 19. Приймач на вході блока 17 змінюється напрямок обертання 19-1, блок запам'ятовування 19-2 і блокпорівнянь двигуна 17-3, який через редуктор 17-4 передаєть19-3 - типові загальновідомі пристрої приймачів [5, ся на вхід датчика кутового положення антени 17-5 6], а також цифрових і вимірювальних пристроїв [3, і на вихід блока 17. 4]. Блок сигналу похибки 17-1, підсилювач 17-2, Вимірювачі амплітуди 25 і 26 (див. Фіг.1 (1б)) двигун 17-3, редуктор 17-4, датчик кутового полозагальновідомі типові пристрої цифрових і вимірюження антени 17-5 - загальновідомі типові пристрої вальних схем [3, 4]. електромеханічних систем стеження [5]. На Фіг.6 наведений один з варіантів побудови Двохпроменева антена 18 (див. Фіг.1 (1а, 1б)) блока визначення величини і знаку відхилення цілі загальновідомий пристрій радіолокаційних систем від рівносигнального напрямку 27, до складу якого [1, 5], який забезпечує приймання електромагнітвходять блок віднімання 27-1. перший і другий ного випромінювання випромінюючих об'єктів і блоки порівняння 27-2 і 27-3, дешифратор 27-4. передачу відповідних сигналів на вхід приймача. В Функціональна схема блока визначення величини і залежності від призначення антени і її частотного знаку відхилення цілі від рівносигнального напрядіапазону застосовуються антени різних типів : мку 27, наведена на Фіг.6, забезпечує вимірюван, , , вібраторні, параболічні, рупорні тощо [5]. ня величини DU=1U1-U21, D a = 1a1- a2 1 , яка від 11 87074 12 набору блоків І 7 підключені до відповідних вихоповідає відхиленню цілі від рівносигнального надів 1(е), 2(k), 3(l) другого дешифратора 16. прямку антени, коли в моноімпульсному пошуковоВиходи блоків I 7-1, 7-2, 7-3 першого набору вимірювальному пеленгаторі (див. Фіг.1 (1а, 1б)) у блоків І 7 підключені до відповідних входів 1, 2, 3 блоках підсилення і визначення сигналів 19 і 23 блока АБО 8 (див. Фіг.1 (1б)), вихід якого підклювикористовуються логарифмічні підсилювачі. чений до другого входу блока визначення кутових Блок визначення величини і знаку відхилення координат 9, третій вхід якого підключений до друцілі від рівносигнального напрямку 27 працює тагого виходу блока запам'ятовування 4 (див. Фіг.1 ким чином: амплітуди сигналів U1, U2 (логарифми (1а, 1б)). Вихід блока визначення кутових коордиU1, U2) у вигляді двійкових паралельних кодів з нат 9 підключений до першого входу приводу анпершого і другого виходів блока 27 (див. Фіг.6) тени 17 і перших (інформаційних) входів блоків І надходять відповідно на перші і другі входи блока 20-1, 20-2, 20-3 другого набору блоків І 20. Виходи віднімання 27-1, блоків порівняння 27-2, 27-3. блоків І 20-1, 20-2, 20-3 другого набору блоків І 20 і В блоці віднімання 27-1 виробляється різниця виходи другого дешифратора 16 ((див. Фіг.1 (1а, амплітуд DU=1U1-U2I, яка пропорційна величині 1б)) підключені відповідно до перших (інформаційвідхилення цілі DΠ від рівносигнального напрямку них) входів блоків І 21-1, 21-2, 21-3 третього набоантени. Величина DU з виходу блока віднімання ру блоків І 21 і до других (керуючих) входів блоків І 27-1 надходить на вхід дешифратора 27-4. На ви21-1, 21-2, 21-3 третього набору блоків І 21. Вихоході дешифратора виробляється величина DΠ, яка ди блоків І 21-1, 21-2, 21-3 третього набору блоків І надходить на третій вихід („DΠ") блока 27. 21 підключені до відповідних блоків запам'ятовуУ першому блоці порівняння 27-2 за умов вання 22-1, 22-2, 22-3 другого набору входів блоків U1
ДивитисяДодаткова інформація
Назва патенту англійськоюMono-pulse search-measuring direction finder
Автори англійськоюPokryshevskyi Viktor Mykhailovych, Steriopolo Yevhen Anatoliiovych, Titov Valerii Serhiiovych, Chyhyryn Oleh Trokhymovych
Назва патенту російськоюМоноимпульсный поисково-измерительный пеленгатор
Автори російськоюПокрышевский Виктор Михайлович, Стериополо Евгений Анатольевич, ТИтов ВалерИй Сергеевич, Чигирин Олег Трофимович
МПК / Мітки
МПК: G01S 3/02
Мітки: моноімпульсний, пошуково-вимірювальний, пеленгатор
Код посилання
<a href="https://ua.patents.su/11-87074-monoimpulsnijj-poshukovo-vimiryuvalnijj-pelengator.html" target="_blank" rel="follow" title="База патентів України">Моноімпульсний пошуково-вимірювальний пеленгатор</a>
Багатоканальний пошуково-вимірювальний пеленгатор рухомих випромінюючих об’єктів
Номер патенту: 79311
Опубліковано: 11.06.2007
Автори: Остапов Анатолій Олександрович, Чигирин Олег Трохимович
МПК: G01S 3/02
Мітки: об'єктів, пошуково-вимірювальний, рухомих, випромінюючих, багатоканальний, пеленгатор
Формула / Реферат:
Багатоканальний пошуково-вимірювальний пеленгатор рухомих випромінюючих об'єктів, що складається із вимірювальної антени, приводу антени, пошукової антени, першого і другого приймачів, перемикача, подільника потужності, пристрою індикації, першого і другого блоків І, першого і другого блоків НІ, формувача сигналу помилки, датчика кута та датчика кута
Пошуково-вимірювальний загоризонтний пеленгатор рухомих випромінюючих об’єктів
Номер патенту: 75745
Опубліковано: 15.05.2006
Автори: Чигирин Олег Трохимович, Остапов Анатолій Олександрович
МПК: G01S 3/02
Мітки: випромінюючих, загоризонтний, об'єктів, пошуково-вимірювальний, рухомих, пеленгатор
Формула / Реферат:
Пошуково-вимірювальний загоризонтний пеленгатор рухомих випромінюючих об'єктів, що складається із вимірювальної антени, приводу антени, першого приймача, блока визначення кутових координат, пристрою індикації, формувача керуючих сигналів, у якому вихід першого приймача приєднаний до першого входу блока визначення кутових координат, перший вхід вимірювальної антени з’єднаний з виходом приводу антени, другий вихід вимірювальної антени...
Моноімпульсний сумарно-різницевий пеленгатор
Номер патенту: 84609
Опубліковано: 10.11.2008
Автори: Остапов Анатолій Олександрович, Чигирин Олег Трохимович
МПК: G01S 5/10
Мітки: пеленгатор, сумарно-різницевий, моноімпульсний
Формула / Реферат:
Моноімпульсний сумарно-різницевий пеленгатор для одночасного вимірювання кутових напрямків на декілька випромінюючих об'єктів в одній площині в межах головної пелюстки пеленгаційної антени, що містить високочастотну антенну систему у складі блока випромінювачів, кільцевого хвилевідного моста, дзеркала, приймач сумарного каналу, який включає змішувач сумарного каналу, місцевий гетеродин, підсилювач проміжної частоти сумарного каналу, перший...
Моноімпульсний сумарно-амплітудний пеленгатор
Номер патенту: 85121
Опубліковано: 25.12.2008
Автори: Тітов Валерій Сергійович, Чигирин Олег Трохимович, Стеріополо Євген Анатолійович, Покришевський Віктор Михайлович
Мітки: сумарно-амплітудний, пеленгатор, моноімпульсний
Формула / Реферат:
Моноімпульсний сумарно-амплітудний пеленгатор, що містить високочастотну антенну систему у складі блока опромінювачів, кільцевого хвилевідного моста і дзеркала, приймач сумарного каналу у складі змішувача сумарного каналу, місцевого гетеродина, підсилювача проміжної частоти сумарного каналу, першого амплітудного детектора та схему складання, причому перший сумарний вихід кільцевого хвилевідного моста підключений до першого входу змішувача...
Загоризонтний багатоцільовий пеленгатор рухомих випромінюючих об’єктів
Номер патенту: 69350
Опубліковано: 15.06.2006
Автори: Покришевський Віктор Михайлович, Стеріополо Євген Анатолійович, Остапов Анатолій Олександрович, Чигирин Олег Трохимович, Хозяїнов Сергій Арсенійович, Тітов Валерій Сергійович, Радченко Октябрина Антонівна
Мітки: загоризонтний, багатоцільовий, об'єктів, випромінюючих, рухомих, пеленгатор
Формула / Реферат:
Корисна модель, що описується, відноситься до клейових композицій, які можуть бути використані в паперовій, поліграфічній, пакувальній і текстильній промисловостях для нанесення ворсових зображень в електростатичному полі.Відома клейова композиція на основі полівінілацетатної емульсії, для нанесення ворсу в електростатичному полі містить: полівінілацетатну емульсію (50%-на) - 80%; поліакриловий емульгатор - 15,0%, 80%-ний розчин...
Попередній патент: Цифровий інтегратор
Наступний патент: Спосіб антимагнітного екранування намотувальних вузлів
Випадковий патент: Спосіб зниження концентрації бактерійних ендотоксинів у воді для ін'єкцій та фізіологічних розчинах