Система і спосіб подальшої обробки профілю твердого тіла, який визначається переважно динамічно, зокрема з метою визначення зносу, який виник
Номер патенту: 91518
Опубліковано: 10.08.2010
Автори: Новашик Крістіан, Хоффманн Манфред, Брінкманн Андреас, Хоффманн Дітер, Вальтер Міхель Й.
Формула / Реферат
1. Спосіб подальшої обробки профілю (ПРОФІЛЬ) твердого тіла (201, 201а), який визначається з метою встановлення виниклого зносу (РІЗНИЦЯ), наприклад, колеса рейкового транспортного засобу, причому знос (РІЗНИЦЮ) визначають за допомогою порівняння даних профілю (ПРОФІЛЬ), який визначається, з записаними в інформаційній базі (2) даними про задану криву (НАВЧЕНО) еталонного профілю через системний елемент (1), який являє собою інтерфейс, який здійснює зв'язок з Інтернетом або локальною мережею через персональний комп'ютер, і дані профілю (ПРОФІЛЬ), який визначається, використовують як керуючу величину для керування виробництвом в одній субсистемі (TS3), яка служить для керування виробництвом і взаємодіє з іншою субсистемою (TS1), в якій знаходиться база даних зносу, і з іншою субсистемою (TS2), яка являє собою матеріальний склад (4), і яка містить комунікаційні системи (KS1 - KS3), які через системні зв'язки (W5, W8, W11) передають дані для керування щонайменше одним токарським автоматом (8, 11) для механічної обробки поверхні колеса (201а) рейкового транспортного засобу або для подачі (14) матеріалу, причому залежно від визначеного таким чином зносу (РІЗНИЦЯ): не потребуючі ремонту колеса (201а), в яких профілі (ПРОФІЛЬ) після порівняння з заданою кривою (НАВЧЕНО) не досягають попередньо заданого значення зносу (КОНТРОЛЬНЕ ЗНАЧЕННЯ), виключають з ремонту, або обробку поверхні здійснюють для відновлення у вигляді репрофілювання зношеного колеса або для заміни колеса (201а) рейкового транспортного засобу, яке не піддається більше репрофілюванню, у вигляді виготовлення нового колеса, і при цьому дані профілю (ПРОФІЛЬ), який визначається, з іншими параметрами для обробки поверхні, а саме, геометричними даними, технологічними даними, інструментальними даними і/або технологічними картами використовують для специфічного для кожного автомата керування подачею матеріалу.
2. Спосіб за п. 1, який відрізняється тим, що дані профілю (ПРОФІЛЬ), який визначається, використовують як керуючу величину для керування швидкостями подовжньої та поперечної подач для регулювання рівня матеріалу, що видаляється щонайменше одним автоматом (8).
3. Спосіб за п. 1 або 2, який відрізняється тим, що дані додаткових параметрів, такі як геометричні дані твердого тіла (201, 201а), технологічні дані, інструментальні дані і/або технологічні карти, використовують як керуючі величини для керування щонайменше одним автоматом (8) для обробки поверхні.
4. Спосіб за п. 1, який відрізняється тим, що дані профілю (ПРОФІЛЬ), який визначається, залучають для аналізу потреби, здійснюваного за допомогою системи аналізу потреби, що базується на знаннях, на основі якого керують поставками на матеріальний склад (TS2, 4).
5. Спосіб за п. 1, який відрізняється тим, що з профілів (ПРОФІЛЬ) декількох твердих тіл (201, 201а) узагальнюючим чином для відповідно визначених геометрій і/або технологій, а також для даних про використані інструменти створюють керуючі величини для виготовлення нового твердого тіла (201, 201а).
6. Спосіб за п. 1, який відрізняється тим, що керуючі величини з профілів (ПРОФІЛЬ) декількох твердих тіл (201, 201а) створюють за допомогою утворення середніх значень, інтерполяції і/або за допомогою екстраполяції, віднесеної до подальшого часу ходу або до бажаної загальної тривалості ходу колеса (201а) рейкового транспортного засобу.
7. Спосіб за п. 1, який відрізняється тим, що керуючі величини створюють для відповідно визначеного застосування матеріалу і/або для заданої якості поверхні твердого тіла (201, 201а).
8. Спосіб за п. 1, який відрізняється тим, що дані про профіль (ПРОФІЛЬ) збирають у декількох різних місцях (цеху А, В, С, стенд 208).
9. Спосіб за п. 1, який відрізняється тим, що збір даних про профіль (ПРОФІЛЬ) у клієнтові реалізують за схемою клієнт-сервер за допомогою просторово віддаленого від клієнта сервера (системний елемент 1).
10. Спосіб за п. 9, який відрізняється тим, що процеси (95) клієнта для запуску системи, а саме керування світлофором для рейкового транспортного засобу (210), активування тригера для зйомки (106) зображення в приймачі (206), вмикання лазерного пристрою (202), використовуваного для збирання даних про профіль (ПРОФІЛЬ), і/або запуск знімального контуру (100) для збирання даних про профіль (ПРОФІЛЬ) здійснюють по запиту (90) сервера (системний елемент 1).
11. Спосіб за п. 9, який відрізняється тим,що визначення моменту (tf) збирання, для якого вибирають сигнали для збирання даних про профіль (ПРОФІЛЬ), які подаються приймачем (206), здійснюють у знімальному контурі (100), для реалізації якого в стенд (208), який знаходиться на шляху (209) для рейкових транспортних засобів (210), вбудований апаратний компонент.
12. Спосіб за п. 11, який відрізняється тим, що для збирання даних про профіль (ПРОФІЛЬ) у знімальному контурі (100) у початковий момент (t0) за допомогою лазерного дистанційного датчика (101, 206) формують сигнал (103) для початкових умов твердого тіла (201, 201а), а саме відстані до лазерного пристрою (2), часової зміни цієї відстані і/або розподілення інтенсивності світла.
13. Спосіб за п. 12, який відрізняється тим, що за сигналом (103) для початкових умов твердого тіла (201, 201а) за допомогою його обробки (104) визначають момент (tf) збирання даних про профіль (ПРОФІЛЬ), в який до приймача (206) подають пусковий імпульс (105), в результаті чого відбувається знімання (106) зображення, при якій реєструють матрицю (107) зображення і зареєстроване зображення спрямовують у пам'ять (108).
14. Спосіб за п. 13, який відрізняється тим, що для визначення моменту (tf) збирання, для якого вибирають сигнали для збирання даних про профіль (ПРОФІЛЬ), які подаються приймачем (206), використовують цифровий сигнальний процесор (DSP).
15. Спосіб за п. 13, який відрізняється тим, що момент (tf) збирання, який визначається за початковими умовами, одержують з критерієм максимальної близькості за часом з початковим моментом (t0).
16. Спосіб за п. 13, який відрізняється тим, що для визначення початкових умов твердого тіла (201, 201а) у початковий момент (t0) використовують сигнали для утворення малюнка, які подаються приймачем (206), а момент (tf) збирання визначають переважно за критерієм наявності, тобто повторного виявлення, цього малюнка.
17. Спосіб за п. 16, який відрізняється тим, що для утворення та повторного виявлення малюнка визначають в гістограмі розподілення інтенсивності світла, яке є у початковий момент (t0) і/або в момент (tf) збирання на твердому тілі (201, 201а), і піддають перетворенню зображення, такому як фільтрація верхніх частот, здійснювана за допомогою перетворення Лапласа.
18. Спосіб за п. 16, який відрізняється тим, що для утворення і повторного виявлення малюнка використовують альфа-канал.
19. Спосіб за п. 16, який відрізняється тим, що для утворення і повторного виявлення малюнка застосовують операції фільтрації інтелектуальної обробки зображення, такої як підвищення різкості зображення або створення хром-ефекту.
20. Спосіб за п. 11, який відрізняється тим, що в знімальному контурі (100) здійснюють, пов'язані з таймером і/або певним числом заданих вимірювань, перевірки (110, 111) умов як критеріїв припинення збирання даних про профіль (ПРОФІЛЬ).
21. Спосіб за п. 9, який відрізняється тим, що після збирання даних про профіль (ПРОФІЛЬ) після припинення (112) знімання зображення, дані про профіль (ПРОФІЛЬ) передають від клієнта на сервер (системний елемент 1).
22. Система подальшої обробки профілю (ПРОФІЛЬ) твердого тіла (201, 201а), який визначається з метою встановлення виниклого зносу (РІЗНИЦЯ), наприклад, колеса рейкового транспортного засобу, яка містить компоненти (1-14, TS1-TS3, KS1-KS3), а саме субсистеми (TS1-TS3), включаючи комунікаційні системи (KS1-KS3), які за допомогою системного елемента (1), який являє собою інтерфейс, за рахунок своїх зв'язків (W1-W11) і взаємодій (WW1, WW2), виконані з можливістю реалізації керування виробництвом і щонайменше одним токарським автоматом (8, 11) для механічної обробки поверхні колеса рейкового транспортного засобу і з можливістю специфічної для кожного автомата керування подачі матеріалу з використанням даних профілю (ПРОФІЛЬ) твердого тіла (201, 201а), який визначається, причому передбачено кілька підсистем (TS1, TS2, TS3), які містять в собі підсистему (TS1) для передачі зібраних даних профілю (ПРОФІЛЬ) твердого тіла (201, 201а) і підсистему (TS3) для керування виробництвом, причому підсистема (TS1) для передачі зібраних даних профілю (ПРОФІЛЬ) містить банк (2) даних, в якому зберігаються зібрані дані профілю (ПРОФІЛЬ) у вигляді даних (РІЗНИЦЯ) про знос, а також заданих і/або навчальних кривих (НАВЧЕНО), і при цьому підсистема (TS3) для керування виробництвом утворена залежно від одержуваних з підсистеми (TS1) для передачі зібраних даних профілю (ПРОФІЛЬ) вхідних величин, причому підсистема (TS3) для керування виробництвом містить комунікаційні системи (KS1, KS2, KS3), які керуються за допомогою координаційної системи (5) підсистеми (TS3) і, у свою чергу, керують автоматом (8) для механічної обробки поверхні колеса рейкового транспортного засобу і подачею матеріалу.
23. Система за п. 22, яка відрізняється тим, що містить компоненти (1-14, TS1-TS3, KS1-KS3), які за рахунок своїх зв'язків (W1-W11) і взаємодій (WW1, WW2) виконані з можливістю керування додатковими автоматами (11) для обробки поверхні, такими як токарський автомат (11) для механічної обробки поверхні валів, з використанням даних профілю (ПРОФІЛЬ) твердого тіла (201, 201а), який визначається.
24. Система за п. 22, яка відрізняється тим, що для керування передачею даних профілю (ПРОФІЛЬ), який визначається, на автомати (8, 11) для обробки поверхні і/або для керування передачею даних профілю (ПРОФІЛЬ), який визначається, для подачі (14) матеріалу передбачені апаратні інтерфейси, такі як електричні інтерфейси, наприклад, RS232, RS422, TTY.
25. Система за п. 22, яка відрізняється тим, що субсистема (TS3) для керування виробництвом містить в собі щонайменше одну координаційну систему (5) для взаємного узгодження інформаційних сигналів і кілька комунікаційних систем (KS1-KS3) переважно з лінійним потоком інформації від одного системного елемента до іншого (W3, W4, W5 в KS1; W6, W7, W8 в KS2; W9, W10, W11 в KS3).
26. Система за п. 25, яка відрізняється тим, що комунікаційна система (KS1-KS3) містить відповідно системний елемент (6, 9, 12) для підготовки даних і апаратний інтерфейс (7, 10, 13) для керування передачею даних профілю (ПРОФІЛЬ), який визначається, на автомати (8, 11) для обробки поверхні і/або для подачі (14) матеріалу.
27. Система за п. 22, яка відрізняється тим, що для реалізації зв'язків (W1-W11) і взаємодій (WW1, WW2) між її компонентами (1-14, TS1-TS3, KS1-KS3) використовують підтримувану за допомогою комп'ютера (системний елемент 1) передачу даних через Інтернет (INET) і/або локальні мережі (LAN).
28. Система за п. 22, яка відрізняється тим, що містить субсистему (TS1), яка для передачі даних про профілі (ПРОФІЛЬ), зібрані у декількох різних місцях (цеху А, В, С, стенд 208), містить у системному елементі (1) інтерфейс, виконаний з можливістю створення з'єднання через Інтернет (INET) або локальну мережу (LAN).
29. Система за п. 28, яка відрізняється тим, що субсистема (TS1), яка служить для передачі зібраних даних про профілі (ПРОФІЛЬ), містить сервер (системний елемент 1) схеми клієнт- сервер, причому дані про профілі (ПРОФІЛЬ) збирають за допомогою клієнта.
30. Система за п. 28, яка відрізняється тим, що субсистема (TS1), яка служить для передачі зібраних даних про профілі (ПРОФІЛЬ), містить систему аналізу потреби як системний елемент (3).
31. Система за п. 30, яка відрізняється тим, що система (3) аналізу потреби перебуває у взаємодії (WW1, WW2), з одного боку, з базою (2) даних, а, з іншого боку, з матеріальним складом (TS2, 4).
32. Система за п. 30, яка відрізняється тим, що в систему (3) аналізу потреби інтегровані бази даних, які базуються на знаннях.
33. Система за п. 27, яка відрізняється тим, що інтегровані в систему (3) аналізу потреби бази даних містять одержані емпіричним шляхом за допомогою екстра- або інтерполяції виміряних значень зносу (РІЗНИЦЯ) дані і/або дані, основані на теоретичній моделі зносу.
34. Система за п. 29, яка відрізняється тим, що містить цифровий сигнальний процесор (DSP) для визначення моменту (tf) збирання, в який відбувається збір даних про профіль (ПРОФІЛЬ).
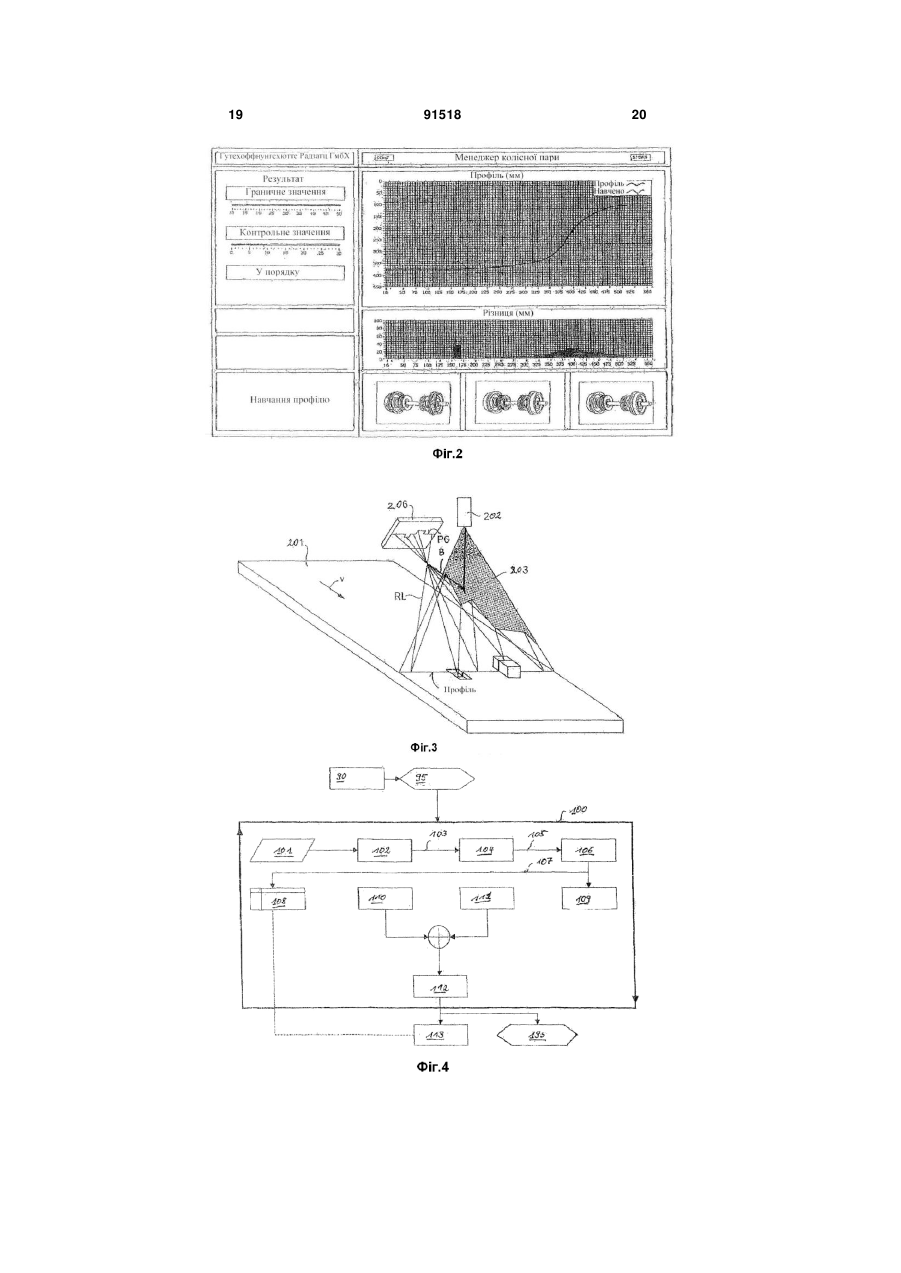
35. Система за п. 22, яка відрізняється тим, що в субсистему (TS1, TS2, TS3) інтегрований дисплей, на якому у вигляді графічного представлення і/або словесної інформації відображені дані профілю (ПРОФІЛЬ), який визначається, заданих кривих (НАВЧАННЯ), зносу (РІЗНИЦЯ), інформація про вимірювані і/або оброблювані місця і/або узагальнення результатів (РЕЗУЛЬТАТИ) порівняння визначеного профілю (ПРОФІЛЬ) з граничним значенням (ГРАНИЧНЕ ЗНАЧЕННЯ) або контрольним значенням (КОНТРОЛЬНЕ ЗНАЧЕННЯ).
Текст
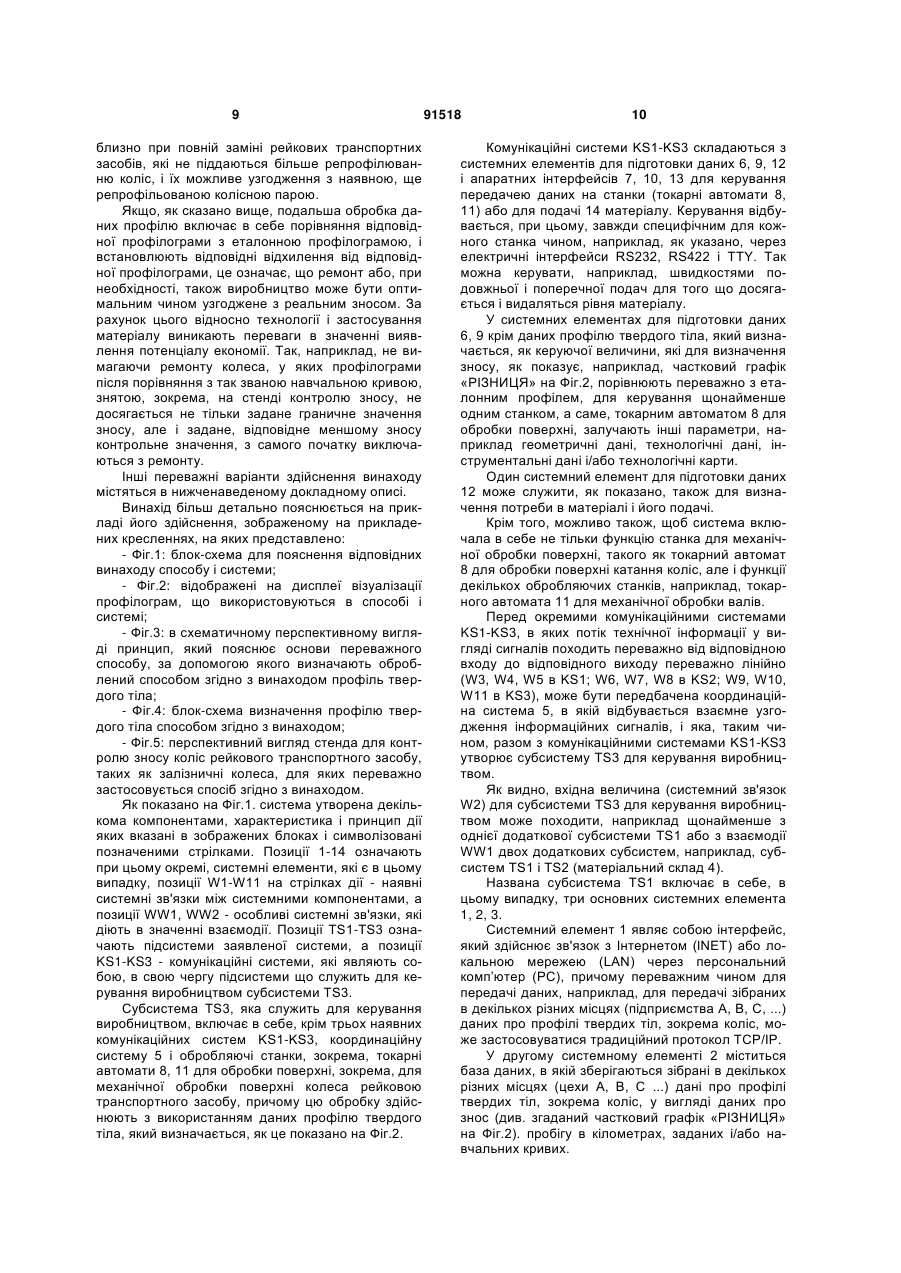
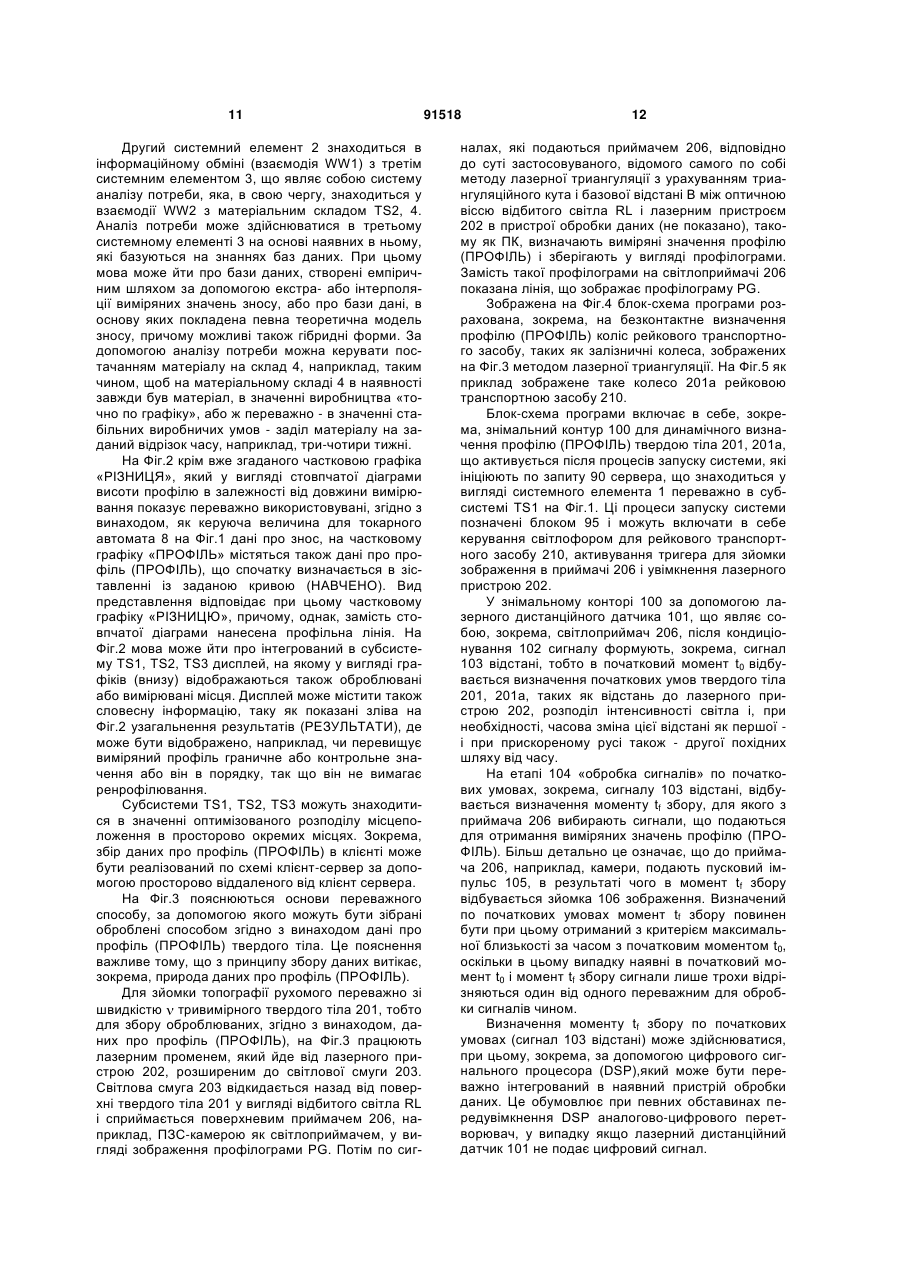
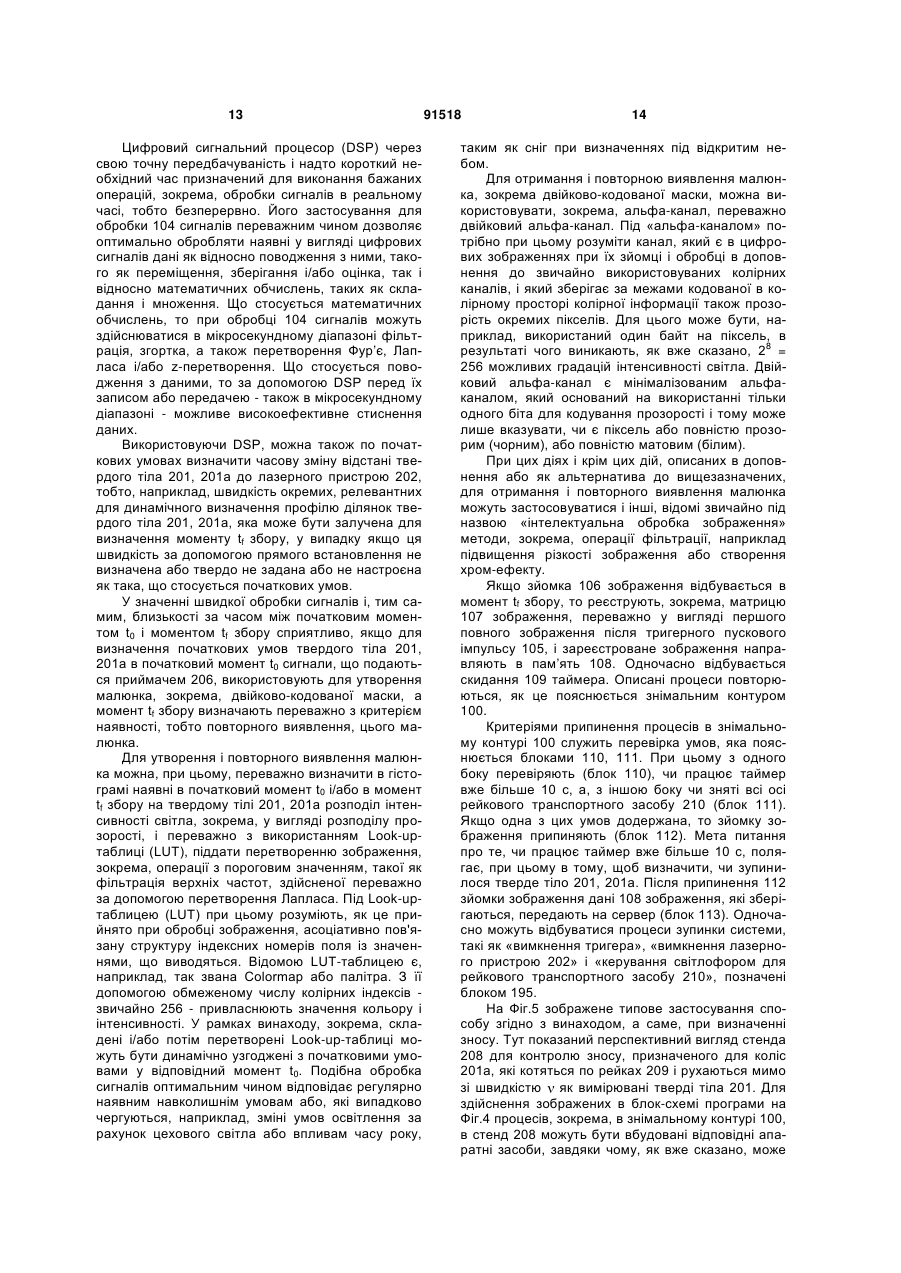
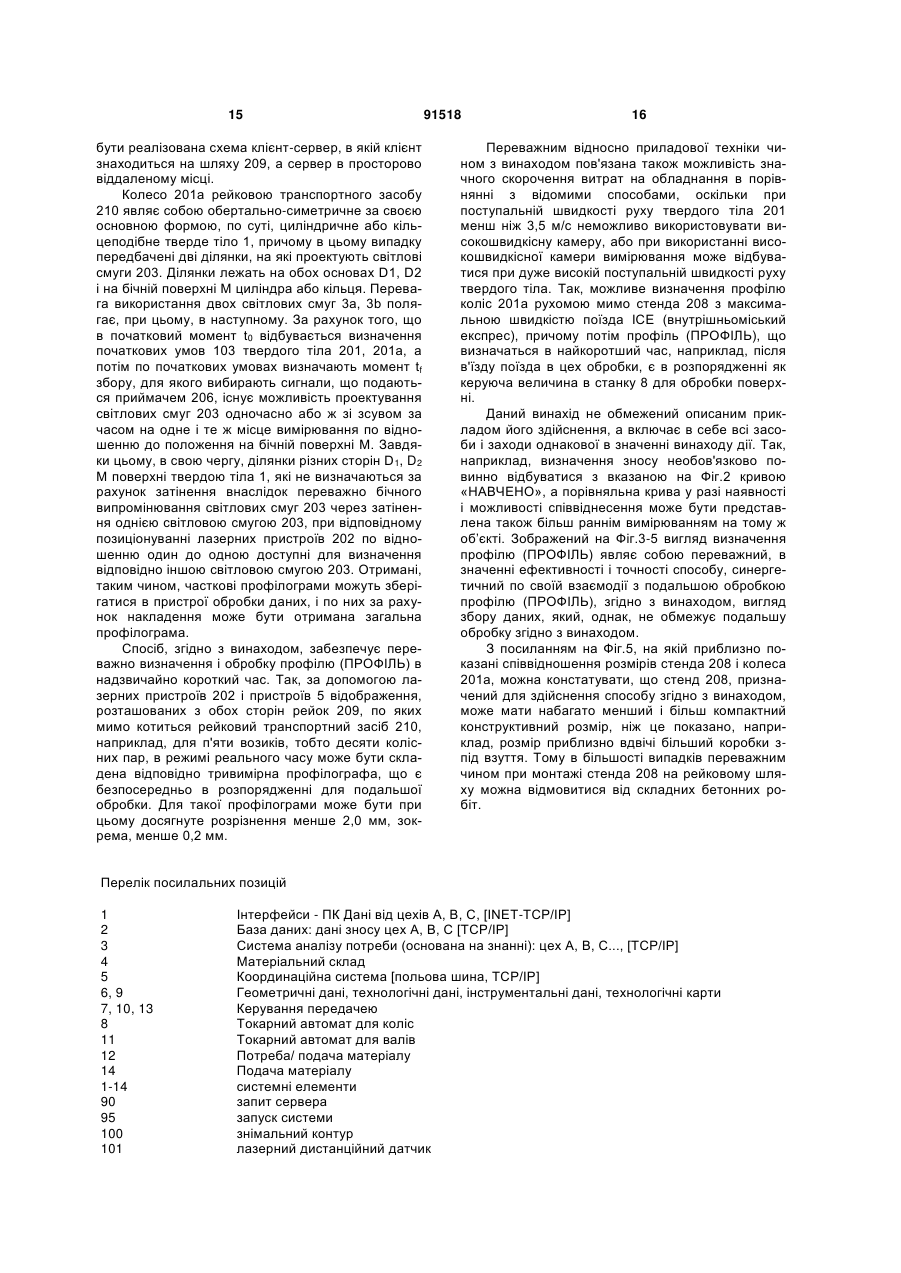
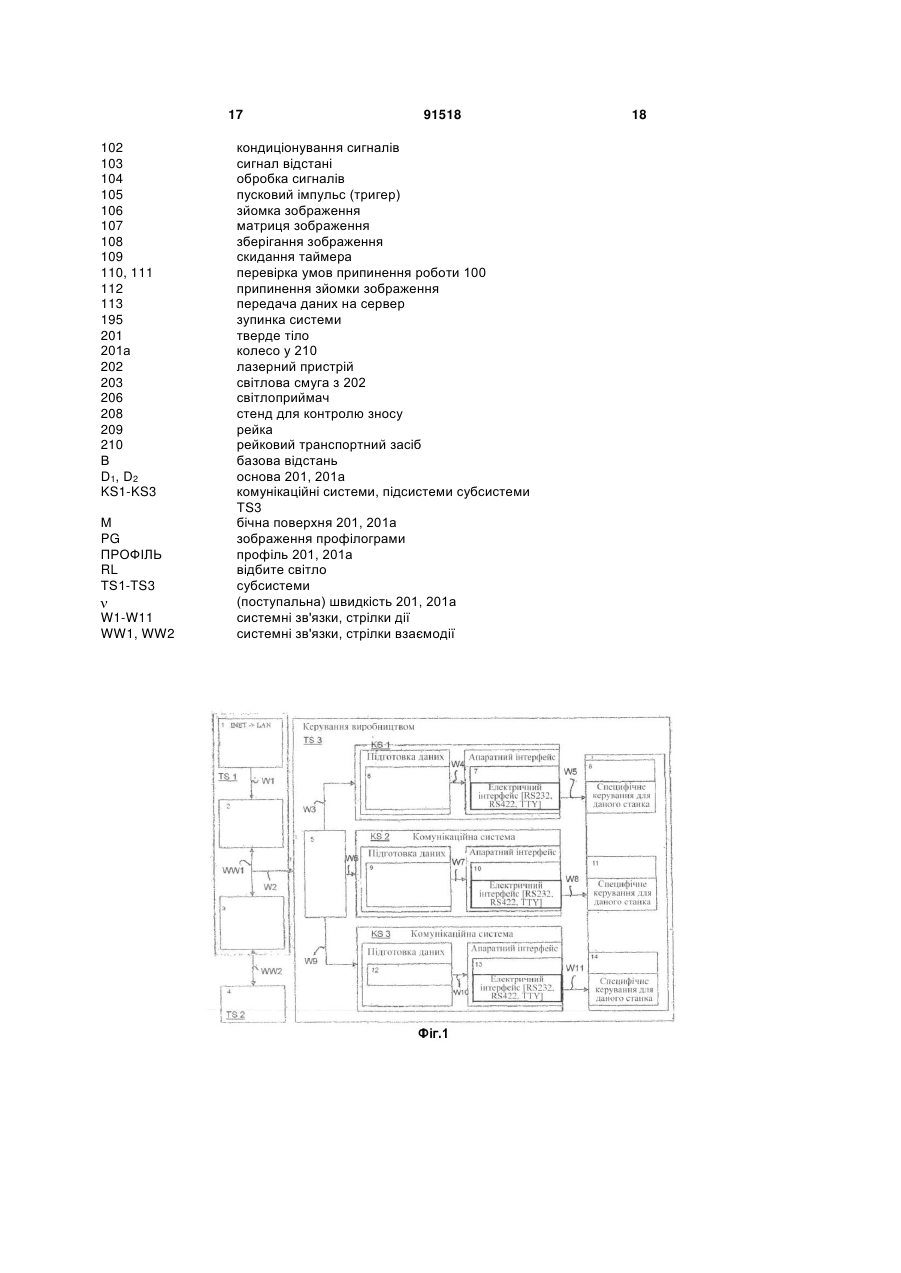
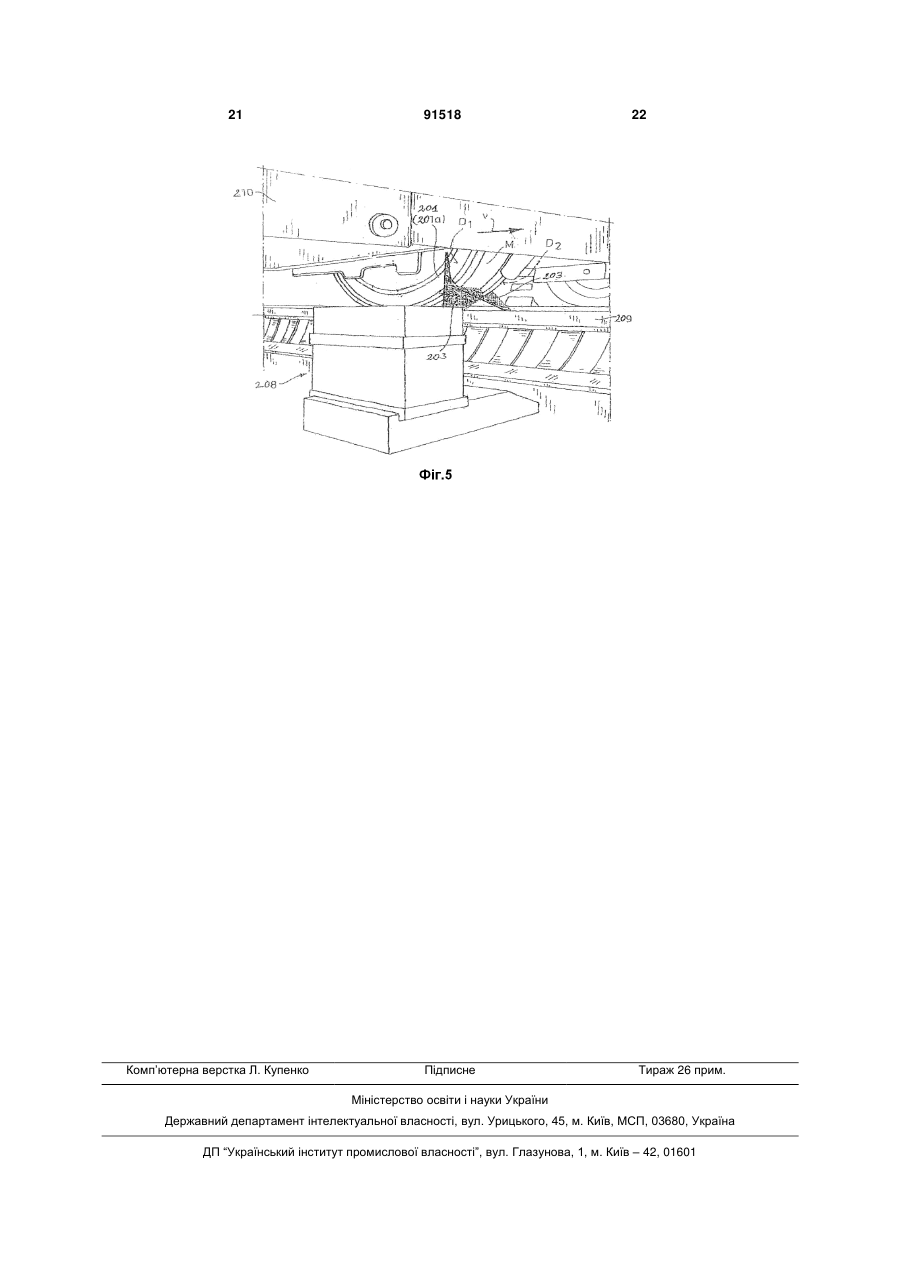
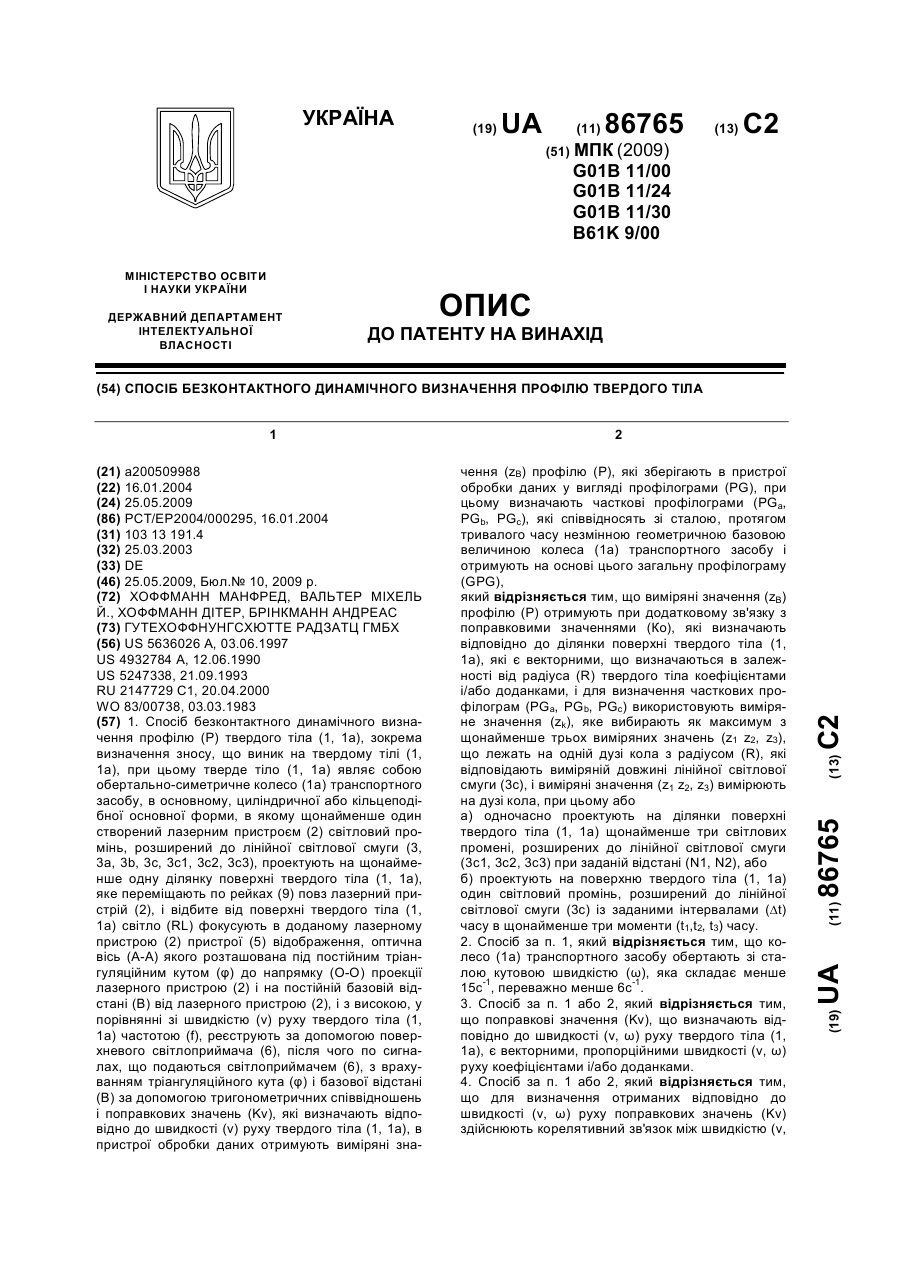
1. Спосіб подальшої обробки профілю (ПРОФІЛЬ) твердого тіла (201, 201а), який визначається з метою встановлення виниклого зносу (РІЗНИЦЯ), наприклад, колеса рейкового транспортного засобу, причому знос (РІЗНИЦЮ) визначають за допомогою порівняння даних профілю (ПРОФІЛЬ), який визначається, з записаними в інформаційній базі (2) даними про задану криву (НАВЧЕНО) еталонного профілю через системний елемент (1), який являє собою інтерфейс, який здійснює зв'язок з Інтернетом або локальною мережею через персональний комп'ютер, і дані профілю (ПРОФІЛЬ), який визначається, використовують як керуючу величину для керування виробництвом в одній субсистемі (TS3), яка служить для керування виробництвом і взаємодіє з іншою субсистемою (TS1), в якій знаходиться база даних зносу, і з іншою субсистемою (TS2), яка являє собою матеріальний склад (4), і яка містить комунікаційні системи (KS1 - KS3), які через системні зв'язки (W5, W8, W11) передають дані для керування щонайменше одним токарським автоматом (8, 11) для механічної обробки поверхні колеса (201а) рейкового транспортного засобу або для подачі (14) матеріалу, причому залежно від визначеного таким чином зносу (РІЗНИЦЯ): не потребуючі ремонту колеса (201а), в яких профілі (ПРОФІЛЬ) після порівняння з заданою кривою (НАВЧЕНО) не дося 2 (19) 1 3 сті ходу колеса (201а) рейкового транспортного засобу. 7. Спосіб за п. 1, який відрізняється тим, що керуючі величини створюють для відповідно визначеного застосування матеріалу і/або для заданої якості поверхні твердого тіла (201, 201а). 8. Спосіб за п. 1, який відрізняється тим, що дані про профіль (ПРОФІЛЬ) збирають у декількох різних місцях (цеху А, В, С, стенд 208). 9. Спосіб за п. 1, який відрізняється тим, що збір даних про профіль (ПРОФІЛЬ) у клієнтові реалізують за схемою клієнт-сервер за допомогою просторово віддаленого від клієнта сервера (системний елемент 1). 10. Спосіб за п. 9, який відрізняється тим, що процеси (95) клієнта для запуску системи, а саме керування світлофором для рейкового транспортного засобу (210), активування тригера для зйомки (106) зображення в приймачі (206), вмикання лазерного пристрою (202), використовуваного для збирання даних про профіль (ПРОФІЛЬ), і/або запуск знімального контуру (100) для збирання даних про профіль (ПРОФІЛЬ) здійснюють по запиту (90) сервера (системний елемент 1). 11. Спосіб за п. 9, який відрізняється тим, що визначення моменту (tf) збирання, для якого вибирають сигнали для збирання даних про профіль (ПРОФІЛЬ), які подаються приймачем (206), здійснюють у знімальному контурі (100), для реалізації якого в стенд (208), який знаходиться на шляху (209) для рейкових транспортних засобів (210), вбудований апаратний компонент. 12. Спосіб за п. 11, який відрізняється тим, що для збирання даних про профіль (ПРОФІЛЬ) у знімальному контурі (100) у початковий момент (t0) за допомогою лазерного дистанційного датчика (101, 206) формують сигнал (103) для початкових умов твердого тіла (201, 201а), а саме відстані до лазерного пристрою (2), часової зміни цієї відстані і/або розподілення інтенсивності світла. 13. Спосіб за п. 12, який відрізняється тим, що за сигналом (103) для початкових умов твердого тіла (201, 201а) за допомогою його обробки (104) визначають момент (tf) збирання даних про профіль (ПРОФІЛЬ), в який до приймача (206) подають пусковий імпульс (105), в результаті чого відбувається знімання (106) зображення, при якій реєструють матрицю (107) зображення і зареєстроване зображення спрямовують у пам'ять (108). 14. Спосіб за п. 13, який відрізняється тим, що для визначення моменту (tf) збирання, для якого вибирають сигнали для збирання даних про профіль (ПРОФІЛЬ), які подаються приймачем (206), використовують цифровий сигнальний процесор (DSP). 15. Спосіб за п. 13, який відрізняється тим, що момент (tf) збирання, який визначається за початковими умовами, одержують з критерієм максимальної близькості за часом з початковим моментом (t0). 16. Спосіб за п. 13, який відрізняється тим, що для визначення початкових умов твердого тіла (201, 201а) у початковий момент (t0) використовують сигнали для утворення малюнка, які подаються приймачем (206), а момент (tf) збирання визна 91518 4 чають переважно за критерієм наявності, тобто повторного виявлення, цього малюнка. 17. Спосіб за п. 16, який відрізняється тим, що для утворення та повторного виявлення малюнка визначають в гістограмі розподілення інтенсивності світла, яке є у початковий момент (t0) і/або в момент (tf) збирання на твердому тілі (201, 201а), і піддають перетворенню зображення, такому як фільтрація верхніх частот, здійснена за допомогою перетворення Лапласа. 18. Спосіб за п. 16, який відрізняється тим, що для утворення і повторного виявлення малюнка використовують альфа-канал. 19. Спосіб за п. 16, який відрізняється тим, що для утворення і повторного виявлення малюнка застосовують операції фільтрації інтелектуальної обробки зображення, такої як підвищення різкості зображення або створення хром-ефекту. 20. Спосіб за п. 11, який відрізняється тим, що в знімальному контурі (100) здійснюють, пов'язані з таймером і/або певним числом заданих вимірювань, перевірки (110, 111) умов як критеріїв припинення збирання даних про профіль (ПРОФІЛЬ). 21. Спосіб за п. 9, який відрізняється тим, що після збирання даних про профіль (ПРОФІЛЬ) після припинення (112) знімання зображення, дані про профіль (ПРОФІЛЬ) передають від клієнта на сервер (системний елемент 1). 22. Система подальшої обробки профілю (ПРОФІЛЬ) твердого тіла (201, 201а), який визначається з метою встановлення виниклого зносу (РІЗНИЦЯ), наприклад, колеса рейкового транспортного засобу, яка містить компоненти (1-14, TS1-TS3, KS1-KS3), а саме субсистеми (TS1-TS3), включаючи комунікаційні системи (KS1-KS3), які за допомогою системного елемента (1), який являє собою інтерфейс, за рахунок своїх зв'язків (W1-W11) і взаємодій (WW1, WW2), виконані з можливістю реалізації керування виробництвом і щонайменше одним токарським автоматом (8, 11) для механічної обробки поверхні колеса рейкового транспортного засобу і з можливістю специфічного для кожного автомата керування подачею матеріалу з використанням даних профілю (ПРОФІЛЬ) твердого тіла (201, 201а), який визначається, причому передбачено кілька підсистем (TS1, TS2, TS3), які містять в собі підсистему (TS1) для передачі зібраних даних профілю (ПРОФІЛЬ) твердого тіла (201, 201а) і підсистему (TS3) для керування виробництвом, причому підсистема (TS1) для передачі зібраних даних профілю (ПРОФІЛЬ) містить банк (2) даних, в якому зберігаються зібрані дані профілю (ПРОФІЛЬ) у вигляді даних (РІЗНИЦЯ) про знос, а також заданих і/або навчальних кривих (НАВЧЕНО), і при цьому підсистема (TS3) для керування виробництвом утворена залежно від одержуваних з підсистеми (TS1) для передачі зібраних даних профілю (ПРОФІЛЬ) вхідних величин, причому підсистема (TS3) для керування виробництвом містить комунікаційні системи (KS1, KS2, KS3), які керуються за допомогою координаційної системи (5) підсистеми (TS3) і, у свою чергу, керують автоматом (8) для механічної обробки поверхні колеса рейкового транспортного засобу і подачею матеріалу. 5 91518 6 23. Система за п. 22, яка відрізняється тим, що містить компоненти (1-14, TS1-TS3, KS1-KS3), які за рахунок своїх зв'язків (W1-W11) і взаємодій (WW1, WW2) виконані з можливістю керування додатковими автоматами (11) для обробки поверхні, такими як токарський автомат (11) для механічної обробки поверхні валів, з використанням даних профілю (ПРОФІЛЬ) твердого тіла (201, 201а), який визначається. 24. Система за п. 22, яка відрізняється тим, що для керування передачею даних профілю (ПРОФІЛЬ), який визначається, на автомати (8, 11) для обробки поверхні і/або для керування передачею даних профілю (ПРОФІЛЬ), який визначається, для подачі (14) матеріалу передбачені апаратні інтерфейси, такі як електричні інтерфейси, наприклад, RS232, RS422, TTY. 25. Система за п. 22, яка відрізняється тим, що субсистема (TS3) для керування виробництвом містить в собі щонайменше одну координаційну систему (5) для взаємного узгодження інформаційних сигналів і кілька комунікаційних систем (KS1-KS3) переважно з лінійним потоком інформації від одного системного елемента до іншого (W3, W4, W5 в KS1; W6, W7, W8 в KS2; W9, W10, W11 в KS3). 26. Система за п. 25, яка відрізняється тим, що комунікаційна система (KS1-KS3) містить відповідно системний елемент (6, 9, 12) для підготовки даних і апаратний інтерфейс (7, 10, 13) для керування передачею даних профілю (ПРОФІЛЬ), який визначається, на автомати (8, 11) для обробки поверхні і/або для подачі (14) матеріалу. 27. Система за п. 22, яка відрізняється тим, що для реалізації зв'язків (W1-W11) і взаємодій (WW1, WW2) між її компонентами (1-14, TS1-TS3, KS1KS3) використовують підтримувану за допомогою комп'ютера (системний елемент 1) передачу даних через Інтернет (INET) і/або локальні мережі (LAN). 28. Система за п. 22, яка відрізняється тим, що містить субсистему (TS1), яка для передачі даних про профілі (ПРОФІЛЬ), зібрані у декількох різних місцях (цеху А, В, С, стенд 208), містить у системному елементі (1) інтерфейс, виконаний з можливістю створення з'єднання через Інтернет (INET) або локальну мережу (LAN). 29. Система за п. 28, яка відрізняється тим, що субсистема (TS1), яка служить для передачі зібраних даних про профілі (ПРОФІЛЬ), містить сервер (системний елемент 1) схеми клієнт- сервер, причому дані про профілі (ПРОФІЛЬ) збирають за допомогою клієнта. 30. Система за п. 28, яка відрізняється тим, що субсистема (TS1), яка служить для передачі зібраних даних про профілі (ПРОФІЛЬ), містить систему аналізу потреби як системний елемент (3). 31. Система за п. 30, яка відрізняється тим, що система (3) аналізу потреби перебуває у взаємодії (WW1, WW2), з одного боку, з базою (2) даних, а, з іншого боку, з матеріальним складом (TS2, 4). 32. Система за п. 30, яка відрізняється тим, що в систему (3) аналізу потреби інтегровані бази даних, які базуються на знаннях. 33. Система за п. 27, яка відрізняється тим, що інтегровані в систему (3) аналізу потреби бази даних містять одержані емпіричним шляхом за допомогою екстра- або інтерполяції виміряних значень зносу (РІЗНИЦЯ) дані і/або дані, основані на теоретичній моделі зносу. 34. Система за п. 29, яка відрізняється тим, що містить цифровий сигнальний процесор (DSP) для визначення моменту (tf) збирання, в який відбувається збір даних про профіль (ПРОФІЛЬ). 35. Система за п. 22, яка відрізняється тим, що в субсистему (TS1, TS2, TS3) інтегрований дисплей, на якому у вигляді графічного представлення і/або словесної інформації відображені дані профілю (ПРОФІЛЬ), який визначається, заданих кривих (НАВЧАННЯ), зносу (РІЗНИЦЯ), інформація про вимірювані і/або оброблювані місця і/або узагальнення результатів (РЕЗУЛЬТАТИ) порівняння визначеного профілю (ПРОФІЛЬ) з граничним значенням (ГРАНИЧНЕ ЗНАЧЕННЯ) або контрольним значенням (КОНТРОЛЬНЕ ЗНАЧЕННЯ). Винахід стосується системи і способу подальшої обробки профілю твердого тіла, який визначається, переважно динамічно, зокрема, з метою визначення зносу, що виник. У німецькій патентній заявці DЕ 10313191.4 і в міжнародній патентній заявці РСТ/ЕР 04/00295 описаний безконтактний спосіб динамічного визначення профілю твердого тіла. зокрема, з метою визначення зносу, що виник на твердому тілі, при якому для дотримання короткою часу вимірювання, забезпечення діапазону вимірювання, що перекриває щонайменше три порядки величин, таких як десяті міліметра, міліметри і сантиметри, і високої точності вимірювання навіть у важких умовах експлуатації передбачено, що щонайменше один створений лазерним пристроєм, розширений щонайменше до однієї лінійної світлової смуги світловий промінь проектують щонайменше на одну ділянку поверхні твердою тіла, тверде тіло перемішають мимо лазерного пристрою, відбитий від ділянки поверхні твердого тіла світло фокусують в пристрої відображення, оптична вісь якого розташована під сталим триангуляційним кутом до напрямку проекції лазерного пристрою і на сталій базовій відстані від лазерною пристрою, і з високою, в порівнянні з швидкістю руху твердою тіла, частотою реєструють за допомогою поверхневого світлоприймача, після чого по сигналах, які подаються світлоприймачем, в залежності від триангуляційного кута і базової відстані, за допомогою тригонометричних відношень і при зв'язку з поправковими значеннями, які визначаються відповідно до швидкості руху твердого тіла в пристрої обробки даних отримують виміри значення профілю, які зберігають в пристрої обробки даних у вигляді профілограми. 7 Тверде тіло може являти собою, при цьому, обертально-симетричне тіло, що здійснює поступальний, обертальний рух або, переважно, рух котіння, зокрема колесо транспортного засобу. Спосіб, згідно з винаходом, являє собою, тим самим, переважну можливість визначити профілі колеса під час руху і зробити з цього висновки про знос. У значенні повного визначення профілю переважно, якщо декілька профілограм визначають як часткові профілограми з використанням щонайменше трьох лазерних пристроїв, які проектують світлові смуги на ділянки, які лежать на різних сторонах поверхні твердого тіла, і доданих ним пристроїв відображення, часткові профілограми зберігають в пристрої обробки даних і отримують на основі цього загальну профілограму. У твердого тіла, в основному, циліндричної або кільцеподібної основної форми, такою як колесо транспортного засобу щонайменше три ділянки, на які проектують світлові смуги, можуть лежати при цьому переважно на обох зовнішніх поверхнях або на бічній поверхні циліндра або кільця. Профілограму, часткові профілограми і/або загальну профілограму можна потім порівнювати з відповідно однією або декількома еталонними профілограмами і реєструвати відповідні відхилення від даної еталонної профілограми, що є мірою виникаючого зносу або мірою того, чи лежить виникаючий знос ще в допустимому діапазоні. За допомогою корелятивних зв'язків між виникаючою тривалістю навантаження твердого тіла і певним зносом можна в зв'язку з цим зробити також екстраполюючий висновок про те, як довго, не викликаючи побоювань, може ще тривати навантаження, або коли виявиться необхідною повторна перевірка. При цьому виявилося переважно, якщо профілограму, часткові профілограми, загальну профілограму, відповідну еталонну профілограму і/або відповідні відхилення співвідносять зі сталою, протягом тривалого часу незмінною геометричною базовою величиною, такою як внутрішня периферія обода колеса, що не піддається зносу. Таким чином, поверхню зносу можна зобразити, наприклад, у вигляді розгортки, на якій висотний профіль в порівнянні з базовою величиною відображають відповідними образотворчими засобами. Наприклад, профілограму, часткові профілограми, загальну профілограму, відповідну еталонну профілограму і/або відповідні відхилення можна візуалізувати в індикаторному пристрої, наприклад, на дисплеї. У названих заявках описаний також стенд для контролю зносу коліс рейкового транспортного засобу, таких як залізничні колеса, в якому знаходить застосування описаний спосіб. Стенд розрахований на колеса, які котяться по рейках, які рухаються мимо з поступальною і кутовою швидкостями як вимірювані тверді тіла. При цьому, як базова величина за допомогою системи рівнянь по динамічно визначених виміряних значеннях, визначають, зокрема, еталонний радіус колеса, що котиться. Визначений радіус може служити, з одного боку, основою для вимірюваних значень висоти профілю, що визначаються на біч 91518 8 ній поверхні колеса, а з іншого боку, можна залучити цей радіус для визначення коректувальних значень, які потрібно враховувати відповідно до методу лазерної триангуляції, який лежить в основі вимірювання. Що стосується подальшої обробки динамічно визначеною профілю, то відповідну профілограму, часткові профілограми і/або загальну профілограму можна порівнювати з відповідно однією або декількома еталонними профілограмами і встановити відповідні відхилення від даної еталонної профілограми. Еталонні профілограми можуть являти собою переважно допустимі задані розміри, а одна еталонна профілограма може бути також блоком даних виміряних значень, що зберігається від колишнього вимірювання, так що відповідні відхилення дозволяють судити про те, наскільки великий знос, який виник з минулого вимірювання. У основі даного винаходу лежить задача створення системи і способу подальшої обробки профілю твердого тіла, який визначається, переважно динамічно, зокрема, з метою визначення зносу, який виник, що виходять за рамки відомої обробки сигналів виміряних значень профілю твердою тіла, зокрема, встановлення зносу і порівняння з еталонним профілем. Згідно з винаходом, це досягається за допомогою описаного способу, при якому дані профілю твердого тіла, який визначається, використовують як керуючу величину для керування щонайменше одним станком для обробки поверхні, зокрема, для механічної обробки поверхні колеса рейкового транспортного засобу. Згідно з винаходом, це досягається за допомогою системи описаного роду, компоненти якої при своїй взаємодії здійснюють керування щонайменше одним станком для обробки поверхні, зокрема, для механічної обробки поверхні колеса рейкового транспортного засобу, з використанням даних профілю твердою тіла, який визначається. При цьому для обробки даних з метою керування станком можуть бути залучені додаткові параметри, такі як геометричні дані, технологічні дані, інструментальні дані і/або технологічні карти. Керування передачею даних на станок може відбуватися тоді за допомогою відповідного апаратного інтерфейсу, такого як електричні інтерфейси, наприклад RS232, RS422, TTY. Таким же чином можна керувати також подачею матеріалу. При цьому може здійснюватися, зокрема, відновна обробка поверхні - в значенні так званого репрофілювання - зокрема, на зношеному твердому тілі, якому повинен відповідати профіль твердого тіла, що визначається. Можна також з декількох профілів твердого тіла узагальнюючим чином, наприклад, за допомогою утворення середніх значень і/або за допомогою інтерполяції або віднесеної до подальшого часу ходу або до бажаної загальної тривалості ходу екстраполяції, створити для відповідно певної геометрії, технологій, наприклад, для певного застосування матеріалу і/або початково встановленої якості поверхні, а також для інструментальних даних, керуючі величини для виготовлення нового твердого тіла, при 9 близно при повній заміні рейкових транспортних засобів, які не піддаються більше репрофілюванню коліс, і їх можливе узгодження з наявною, ще репрофільованою колісною парою. Якщо, як сказано вище, подальша обробка даних профілю включає в себе порівняння відповідної профілограми з еталонною профілограмою, і встановлюють відповідні відхилення від відповідної профілограми, це означає, що ремонт або, при необхідності, також виробництво може бути оптимальним чином узгоджене з реальним зносом. За рахунок цього відносно технології і застосування матеріалу виникають переваги в значенні виявлення потенціалу економії. Так, наприклад, не вимагаючи ремонту колеса, у яких профілограми після порівняння з так званою навчальною кривою, знятою, зокрема, на стенді контролю зносу, не досягається не тільки задане граничне значення зносу, але і задане, відповідне меншому зносу контрольне значення, з самого початку виключаються з ремонту. Інші переважні варіанти здійснення винаходу містяться в нижченаведеному докладному описі. Винахід більш детально пояснюється на прикладі його здійснення, зображеному на прикладених кресленнях, на яких представлено: - Фіг.1: блок-схема для пояснення відповідних винаходу способу і системи; - Фіг.2: відображені на дисплеї візуалізації профілограм, що використовуються в способі і системі; - Фіг.3: в схематичному перспективному вигляді принцип, який пояснює основи переважного способу, за допомогою якого визначають оброблений способом згідно з винаходом профіль твердого тіла; - Фіг.4: блок-схема визначення профілю твердого тіла способом згідно з винаходом; - Фіг.5: перспективний вигляд стенда для контролю зносу коліс рейкового транспортного засобу, таких як залізничні колеса, для яких переважно застосовується спосіб згідно з винаходом. Як показано на Фіг.1. система утворена декількома компонентами, характеристика і принцип дії яких вказані в зображених блоках і символізовані позначеними стрілками. Позиції 1-14 означають при цьому окремі, системні елементи, які є в цьому випадку, позиції W1-W11 на стрілках дії - наявні системні зв'язки між системними компонентами, а позиції WW1, WW2 - особливі системні зв'язки, які діють в значенні взаємодії. Позиції ТS1-TS3 означають підсистеми заявленої системи, а позиції KS1-KS3 - комунікаційні системи, які являють собою, в свою чергу підсистеми що служить для керування виробництвом субсистеми TS3. Субсистема ТS3, яка служить для керування виробництвом, включає в себе, крім трьох наявних комунікаційних систем KS1-KS3, координаційну систему 5 і обробляючі станки, зокрема, токарні автомати 8, 11 для обробки поверхні, зокрема, для механічної обробки поверхні колеса рейковою транспортного засобу, причому цю обробку здійснюють з використанням даних профілю твердого тіла, який визначається, як це показано на Фіг.2. 91518 10 Комунікаційні системи KS1-KS3 складаються з системних елементів для підготовки даних 6, 9, 12 і апаратних інтерфейсів 7, 10, 13 для керування передачею даних на станки (токарні автомати 8, 11) або для подачі 14 матеріалу. Керування відбувається, при цьому, завжди специфічним для кожного станка чином, наприклад, як указано, через електричні інтерфейси RS232, RS422 і ΤТΥ. Так можна керувати, наприклад, швидкостями подовжньої і поперечної подач для того що досягається і видаляться рівня матеріалу. У системних елементах для підготовки даних 6, 9 крім даних профілю твердого тіла, який визначається, як керуючої величини, які для визначення зносу, як показує, наприклад, частковий графік «РІЗНИЦЯ» на Фіг.2, порівнюють переважно з еталонним профілем, для керування щонайменше одним станком, а саме, токарним автоматом 8 для обробки поверхні, залучають інші параметри, наприклад геометричні дані, технологічні дані, інструментальні дані і/або технологічні карти. Один системний елемент для підготовки даних 12 може служити, як показано, також для визначення потреби в матеріалі і його подачі. Крім того, можливо також, щоб система включала в себе не тільки функцію станка для механічної обробки поверхні, такого як токарний автомат 8 для обробки поверхні катання коліс, але і функції декількох обробляючих станків, наприклад, токарного автомата 11 для механічної обробки валів. Перед окремими комунікаційними системами KS1-KS3, в яких потік технічної інформації у вигляді сигналів походить переважно від відповідною входу до відповідного виходу переважно лінійно (W3, W4, W5 в KS1; W6, W7, W8 в KS2; W9, W10, W11 в KS3), може бути передбачена координаційна система 5, в якій відбувається взаємне узгодження інформаційних сигналів, і яка, таким чином, разом з комунікаційними системами KS1-KS3 утворює субсистему ТS3 для керування виробництвом. Як видно, вхідна величина (системний зв'язок W2) для субсистеми TS3 для керування виробництвом може походити, наприклад щонайменше з однієї додаткової субсистеми TS1 або з взаємодії WW1 двох додаткових субсистем, наприклад, субсистем ТS1 і TS2 (матеріальний склад 4). Названа субсистема ТS1 включає в себе, в цьому випадку, три основних системних елемента 1, 2, 3. Системний елемент 1 являє собою інтерфейс, який здійснює зв'язок з Інтернетом (lNET) або локальною мережею (LAN) через персональний комп’ютер (PC), причому переважним чином для передачі даних, наприклад, для передачі зібраних в декількох різних місцях (підприємства А, В, С, ...) даних про профілі твердих тіл, зокрема коліс, може застосовуватися традиційний протокол ТСР/ІР. У другому системному елементі 2 міститься база даних, в якій зберігаються зібрані в декількох різних місцях (цехи А, В, С ...) дані про профілі твердих тіл, зокрема коліс, у вигляді даних про знос (див. згаданий частковий графік «РІЗНИЦЯ» на Фіг.2). пробігу в кілометрах, заданих і/або навчальних кривих. 11 Другий системний елемент 2 знаходиться в інформаційному обміні (взаємодія WW1) з третім системним елементом 3, що являє собою систему аналізу потреби, яка, в свою чергу, знаходиться у взаємодії WW2 з матеріальним складом ТS2, 4. Аналіз потреби може здійснюватися в третьому системному елементі 3 на основі наявних в ньому, які базуються на знаннях баз даних. При цьому мова може йти про бази даних, створені емпіричним шляхом за допомогою екстра- або інтерполяції виміряних значень зносу, або про бази дані, в основу яких покладена певна теоретична модель зносу, причому можливі також гібридні форми. За допомогою аналізу потреби можна керувати постачанням матеріалу на склад 4, наприклад, таким чином, щоб на матеріальному складі 4 в наявності завжди був матеріал, в значенні виробництва «точно по графіку», або ж переважно - в значенні стабільних виробничих умов - заділ матеріалу на заданий відрізок часу, наприклад, три-чотири тижні. На Фіг.2 крім вже згаданого частковою графіка «РІЗНИЦЯ», який у вигляді стовпчатої діаграми висоти профілю в залежності від довжини вимірювання показує переважно використовувані, згідно з винаходом, як керуюча величина для токарного автомата 8 на Фіг.1 дані про знос, на частковому графіку «ПРОФІЛЬ» містяться також дані про профіль (ПРОФІЛЬ), що спочатку визначається в зіставленні із заданою кривою (НАВЧЕНО). Вид представлення відповідає при цьому частковому графіку «РІЗНИЦЮ», причому, однак, замість стовпчатої діаграми нанесена профільна лінія. На Фіг.2 мова може йти про інтегрований в субсистему ТS1, ТS2, TS3 дисплей, на якому у вигляді графіків (внизу) відображаються також оброблювані або вимірювані місця. Дисплей може містити також словесну інформацію, таку як показані зліва на Фіг.2 узагальнення результатів (РЕЗУЛЬТАТИ), де може бути відображено, наприклад, чи перевищує виміряний профіль граничне або контрольне значення або він в порядку, так що він не вимагає ренрофілювання. Субсистеми TS1, ТS2, ТS3 можуть знаходитися в значенні оптимізованого розподілу місцеположення в просторово окремих місцях. Зокрема, збір даних про профіль (ПРОФІЛЬ) в клієнті може бути реалізований по схемі клієнт-сервер за допомогою просторово віддаленого від клієнт сервера. На Фіг.3 пояснюються основи переважного способу, за допомогою якого можуть бути зібрані оброблені способом згідно з винаходом дані про профіль (ПРОФІЛЬ) твердого тіла. Це пояснення важливе тому, що з принципу збору даних витікає, зокрема, природа даних про профіль (ПРОФІЛЬ). Для зйомки топографії рухомого переважно зі швидкістю тривимірного твердого тіла 201, тобто для збору оброблюваних, згідно з винаходом, даних про профіль (ПРОФІЛЬ), на Фіг.3 працюють лазерним променем, який йде від лазерного пристрою 202, розширеним до світлової смуги 203. Світлова смуга 203 відкидається назад від поверхні твердого тіла 201 у вигляді відбитого світла RL і сприймається поверхневим приймачем 206, наприклад, ПЗС-камерою як світлоприймачем, у вигляді зображення профілограми PG. Потім по сиг 91518 12 налах, які подаються приймачем 206, відповідно до суті застосовуваного, відомого самого по собі методу лазерної триангуляції з урахуванням триангуляційного кута і базової відстані В між оптичною віссю відбитого світла RL і лазерним пристроєм 202 в пристрої обробки даних (не показано), такому як ПК, визначають виміряні значення профілю (ПРОФІЛЬ) і зберігають у вигляді профілограми. Замість такої профілограми на світлоприймачі 206 показана лінія, що зображає профілограму PG. Зображена на Фіг.4 блок-схема програми розрахована, зокрема, на безконтактне визначення профілю (ПРОФІЛЬ) коліс рейкового транспортного засобу, таких як залізничні колеса, зображених на Фіг.3 методом лазерної триангуляції. На Фіг.5 як приклад зображене таке колесо 201а рейковою транспортною засобу 210. Блок-схема програми включає в себе, зокрема, знімальний контур 100 для динамічного визначення профілю (ПРОФІЛЬ) твердою тіла 201, 201а, що активується після процесів запуску системи, які ініціюють по запиту 90 сервера, що знаходиться у вигляді системного елемента 1 переважно в субсистемі ТS1 на Фіг.1. Ці процеси запуску системи позначені блоком 95 і можуть включати в себе керування світлофором для рейкового транспортного засобу 210, активування тригера для зйомки зображення в приймачі 206 і увімкнення лазерного пристрою 202. У знімальному конторі 100 за допомогою лазерного дистанційного датчика 101, що являє собою, зокрема, світлоприймач 206, після кондиціонування 102 сигналу формують, зокрема, сигнал 103 відстані, тобто в початковий момент t0 відбувається визначення початкових умов твердого тіла 201, 201а, таких як відстань до лазерного пристрою 202, розподіл інтенсивності світла і, при необхідності, часова зміна цієї відстані як першої і при прискореному русі також - другої похідних шляху від часу. На етапі 104 «обробка сигналів» по початкових умовах, зокрема, сигналу 103 відстані, відбувається визначення моменту tf збору, для якого з приймача 206 вибирають сигнали, що подаються для отримання виміряних значень профілю (ПРОФІЛЬ). Більш детально це означає, що до приймача 206, наприклад, камери, подають пусковий імпульс 105, в результаті чого в момент tf збору відбувається зйомка 106 зображення. Визначений по початкових умовах момент tf збору повинен бути при цьому отриманий з критерієм максимальної близькості за часом з початковим моментом t0, оскільки в цьому випадку наявні в початковий момент t0 і момент tf збору сигнали лише трохи відрізняються один від одного переважним для обробки сигналів чином. Визначення моменту tf збору по початкових умовах (сигнал 103 відстані) може здійснюватися, при цьому, зокрема, за допомогою цифрового сигнального процесора (DSP),який може бути переважно інтегрований в наявний пристрій обробки даних. Це обумовлює при певних обставинах передувімкнення DSP аналогово-цифрового перетворювач, у випадку якщо лазерний дистанційний датчик 101 не подає цифровий сигнал. 13 Цифровий сигнальний процесор (DSP) через свою точну передбачуваність і надто короткий необхідний час призначений для виконання бажаних операцій, зокрема, обробки сигналів в реальному часі, тобто безперервно. Його застосування для обробки 104 сигналів переважним чином дозволяє оптимально обробляти наявні у вигляді цифрових сигналів дані як відносно поводження з ними, такого як переміщення, зберігання і/або оцінка, так і відносно математичних обчислень, таких як складання і множення. Що стосується математичних обчислень, то при обробці 104 сигналів можуть здійснюватися в мікросекундному діапазоні фільтрація, згортка, а також перетворення Фур’є, Лапласа і/або z-перетворення. Що стосується поводження з даними, то за допомогою DSP перед їх записом або передачею - також в мікросекундному діапазоні - можливе високоефективне стиснення даних. Використовуючи DSP, можна також по початкових умовах визначити часову зміну відстані твердого тіла 201, 201а до лазерного пристрою 202, тобто, наприклад, швидкість окремих, релевантних для динамічного визначення профілю ділянок твердого тіла 201, 201а, яка може бути залучена для визначення моменту tf збору, у випадку якщо ця швидкість за допомогою прямого встановлення не визначена або твердо не задана або не настроєна як така, що стосується початкових умов. У значенні швидкої обробки сигналів і, тим самим, близькості за часом між початковим моментом t0 і моментом tf збору сприятливо, якщо для визначення початкових умов твердого тіла 201, 201а в початковий момент t0 сигнали, що подаються приймачем 206, використовують для утворення малюнка, зокрема, двійково-кодованої маски, а момент tf збору визначають переважно з критерієм наявності, тобто повторного виявлення, цього малюнка. Для утворення і повторного виявлення малюнка можна, при цьому, переважно визначити в гістограмі наявні в початковий момент t0 і/або в момент tf збору на твердому тілі 201, 201а розподіл інтенсивності світла, зокрема, у вигляді розподілу прозорості, і переважно з використанням Look-upтаблиці (LUT), піддати перетворенню зображення, зокрема, операції з пороговим значенням, такої як фільтрація верхніх частот, здійсненої переважно за допомогою перетворення Лапласа. Під Look-upтаблицею (LUT) при цьому розуміють, як це прийнято при обробці зображення, асоціативно пов'язану структуру індексних номерів поля із значеннями, що виводяться. Відомою LUT-таблицею є, наприклад, так звана Colormap або палітра. З її допомогою обмеженому числу колірних індексів звичайно 256 - привласнюють значення кольору і інтенсивності. У рамках винаходу, зокрема, складені і/або потім перетворені Look-up-таблиці можуть бути динамічно узгоджені з початковими умовами у відповідний момент t0. Подібна обробка сигналів оптимальним чином відповідає регулярно наявним навколишнім умовам або, які випадково чергуються, наприклад, зміні умов освітлення за рахунок цехового світла або впливам часу року, 91518 14 таким як сніг при визначеннях під відкритим небом. Для отримання і повторною виявлення малюнка, зокрема двійково-кодованої маски, можна використовувати, зокрема, альфа-канал, переважно двійковий альфа-канал. Під «альфа-каналом» потрібно при цьому розуміти канал, який є в цифрових зображеннях при їх зйомці і обробці в доповнення до звичайно використовуваних колірних каналів, і який зберігає за межами кодованої в колірному просторі колірної інформації також прозорість окремих пікселів. Для цього може бути, наприклад, використаний один байт на піксель, в результаті чого виникають, як вже сказано, 28 = 256 можливих градацій інтенсивності світла. Двійковий альфа-канал є мінімалізованим альфаканалом, який оснований на використанні тільки одного біта для кодування прозорості і тому може лише вказувати, чи є піксель або повністю прозорим (чорним), або повністю матовим (білим). При цих діях і крім цих дій, описаних в доповнення або як альтернатива до вищезазначених, для отримання і повторного виявлення малюнка можуть застосовуватися і інші, відомі звичайно під назвою «інтелектуальна обробка зображення» методи, зокрема, операції фільтрації, наприклад підвищення різкості зображення або створення хром-ефекту. Якщо зйомка 106 зображення відбувається в момент tf збору, то реєструють, зокрема, матрицю 107 зображення, переважно у вигляді першого повного зображення після тригерного пускового імпульсу 105, і зареєстроване зображення направляють в пам’ять 108. Одночасно відбувається скидання 109 таймера. Описані процеси повторюються, як це пояснюється знімальним контуром 100. Критеріями припинення процесів в знімальному контурі 100 служить перевірка умов, яка пояснюється блоками 110, 111. При цьому з одного боку перевіряють (блок 110), чи працює таймер вже більше 10 с, а, з іншою боку чи зняті всі осі рейкового транспортного засобу 210 (блок 111). Якщо одна з цих умов додержана, то зйомку зображення припиняють (блок 112). Meта питання про те, чи працює таймер вже більше 10 с, полягає, при цьому в тому, щоб визначити, чи зупинилося тверде тіло 201, 201а. Після припинення 112 зйомки зображення дані 108 зображення, які зберігаються, передають на сервер (блок 113). Одночасно можуть відбуватися процеси зупинки системи, такі як «вимкнення тригера», «вимкнення лазерного пристрою 202» і «керування світлофором для рейкового транспортного засобу 210», позначені блоком 195. На Фіг.5 зображене типове застосування способу згідно з винаходом, а саме, при визначенні зносу. Тут показаний перспективний вигляд стенда 208 для контролю зносу, призначеного для коліс 201а, які котяться по рейках 209 і рухаються мимо зі швидкістю як вимірювані тверді тіла 201. Для здійснення зображених в блок-схемі програми на Фіг.4 процесів, зокрема, в знімальному контурі 100, в стенд 208 можуть бути вбудовані відповідні апаратні засоби, завдяки чому, як вже сказано, може 15 бути реалізована схема клієнт-сервер, в якій клієнт знаходиться на шляху 209, а сервер в просторово віддаленому місці. Колесо 201а рейковою транспортного засобу 210 являє собою обертально-симетричне за своєю основною формою, по суті, циліндричне або кільцеподібне тверде тіло 1, причому в цьому випадку передбачені дві ділянки, на які проектують світлові смуги 203. Ділянки лежать на обох основах D1, D2 і на бічній поверхні Μ циліндра або кільця. Перевага використання двох світлових смуг 3а, 3b полягає, при цьому, в наступному. За рахунок того, що в початковий момент t0 відбувається визначення початкових умов 103 твердого тіла 201, 201а, а потім по початкових умовах визначають момент tf збору, для якого вибирають сигнали, що подаються приймачем 206, існує можливість проектування світлових смуг 203 одночасно або ж зі зсувом за часом на одне і те ж місце вимірювання по відношенню до положення на бічній поверхні М. Завдяки цьому, в свою чергу, ділянки різних сторін D1, D2 Μ поверхні твердою тіла 1, які не визначаються за рахунок затінення внаслідок переважно бічного випромінювання світлових смуг 203 через затінення однією світловою смугою 203, при відповідному позиціонуванні лазерних пристроїв 202 по відношенню один до одною доступні для визначення відповідно іншою світловою смугою 203. Отримані, таким чином, часткові профілограми можуть зберігатися в пристрої обробки даних, і по них за рахунок накладення може бути отримана загальна профілограма. Спосіб, згідно з винаходом, забезпечує переважно визначення і обробку профілю (ПРОФІЛЬ) в надзвичайно короткий час. Так, за допомогою лазерних пристроїв 202 і пристроїв 5 відображення, розташованих з обох сторін рейок 209, по яких мимо котиться рейковий транспортний засіб 210, наприклад, для п'яти возиків, тобто десяти колісних пар, в режимі реального часу може бути складена відповідно тривимірна профілографа, що є безпосередньо в розпорядженні для подальшої обробки. Для такої профілограми може бути при цьому досягнуте розрізнення менше 2,0 мм, зокрема, менше 0,2 мм. 91518 16 Переважним відносно приладової техніки чином з винаходом пов'язана також можливість значного скорочення витрат на обладнання в порівнянні з відомими способами, оскільки при поступальній швидкості руху твердого тіла 201 менш ніж 3,5 м/с неможливо використовувати високошвидкісну камеру, або при використанні високошвидкісної камери вимірювання може відбуватися при дуже високій поступальній швидкості руху твердого тіла. Так, можливе визначення профілю коліс 201а рухомою мимо стенда 208 з максимальною швидкістю поїзда ICE (внутрішньоміський експрес), причому потім профіль (ПРОФІЛЬ), що визначаться в найкоротший час, наприклад, після в'їзду поїзда в цех обробки, є в розпорядженні як керуюча величина в станку 8 для обробки поверхні. Даний винахід не обмежений описаним прикладом його здійснення, а включає в себе всі засоби і заходи однакової в значенні винаходу дії. Так, наприклад, визначення зносу необов'язково повинно відбуватися з вказаною на Фіг.2 кривою «НАВЧЕНО», а порівняльна крива у разі наявності і можливості співвіднесення може бути представлена також більш раннім вимірюванням на тому ж об’єкті. Зображений на Фіг.3-5 вигляд визначення профілю (ПРОФІЛЬ) являє собою переважний, в значенні ефективності і точності способу, синергетичний по своїй взаємодії з подальшою обробкою профілю (ПРОФІЛЬ), згідно з винаходом, вигляд збору даних, який, однак, не обмежує подальшу обробку згідно з винаходом. З посиланням на Фіг.5, на якій приблизно показані співвідношення розмірів стенда 208 і колеса 201а, можна констатувати, що стенд 208, призначений для здійснення способу згідно з винаходом, може мати набагато менший і більш компактний конструктивний розмір, ніж це показано, наприклад, розмір приблизно вдвічі більший коробки зпід взуття. Тому в більшості випадків переважним чином при монтажі стенда 208 на рейковому шляху можна відмовитися від складних бетонних робіт. Перелік посилальних позицій 1 2 3 4 5 6, 9 7, 10, 13 8 11 12 14 1-14 90 95 100 101 Інтерфейси - ПК Дані від цехів А, В, С, [INET-ТCP/IP] База даних: дані зносу цех А, В, С [TCP/IP] Система аналізу потреби (основана на знанні): цех А, В, С..., [TCP/IP] Матеріальний склад Координаційна система [польова шина, TCP/IP] Геометричні дані, технологічні дані, інструментальні дані, технологічні карти Керування передачею Токарний автомат для коліс Токарний автомат для валів Потреба/ подача матеріалу Подача матеріалу системні елементи запит сервера запуск системи знімальний контур лазерний дистанційний датчик 17 102 103 104 105 106 107 108 109 110, 111 112 113 195 201 201а 202 203 206 208 209 210 В D1, D2 KS1-KS3 Μ PG ПРОФІЛЬ RL ТS1-TS3 W1-W11 WW1, WW2 91518 кондиціонування сигналів сигнал відстані обробка сигналів пусковий імпульс (тригер) зйомка зображення матриця зображення зберігання зображення скидання таймера перевірка умов припинення роботи 100 припинення зйомки зображення передача даних на сервер зупинка системи тверде тіло колесо у 210 лазерний пристрій світлова смуга з 202 світлоприймач стенд для контролю зносу рейка рейковий транспортний засіб базова відстань основа 201, 201а комунікаційні системи, підсистеми субсистеми TS3 бічна поверхня 201, 201а зображення профілограми профіль 201, 201а відбите світло субсистеми (поступальна) швидкість 201, 201а системні зв'язки, стрілки дії системні зв'язки, стрілки взаємодії 18 19 91518 20 21 Комп’ютерна верстка Л. Купенко 91518 Підписне 22 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem and method for processing a profile of a solid, which profile is captured, preferbly in a dynamic manner, to determine its wear
Автори англійськоюHoffmann Manfred, Nowaschick Christian, Brinkmann Andreas, Hoffmann Dieter, Walter Michel J.
Назва патенту російськоюСистема и способ дальнейшей обработки профиля твердого тела, определяемого преимущественно динамически, в частности с целью определения возникающего износа
Автори російськоюХоффманн Манфред, Новашик Кристиан, Бринкманн Андреас, Хоффманн Дитер, Вальтер Михель Й.
МПК / Мітки
МПК: G05B 19/42
Мітки: зокрема, обробки, система, переважно, профілю, визначення, зносу, метою, спосіб, віник, тіла, визначається, твердого, динамічної, подальшої
Код посилання
<a href="https://ua.patents.su/11-91518-sistema-i-sposib-podalsho-obrobki-profilyu-tverdogo-tila-yakijj-viznachaehtsya-perevazhno-dinamichno-zokrema-z-metoyu-viznachennya-znosu-yakijj-vinik.html" target="_blank" rel="follow" title="База патентів України">Система і спосіб подальшої обробки профілю твердого тіла, який визначається переважно динамічно, зокрема з метою визначення зносу, який виник</a>
Спосіб безконтактного динамічного визначення профілю твердого тіла
Номер патенту: 86765
Опубліковано: 25.05.2009
Автори: Хоффманн Дітер, Хоффманн Манфред, Вальтер Міхель Й., Брінкманн Андреас
МПК: G01B 11/00, B61K 9/00, G01B 11/30, G01B 11/24
Мітки: профілю, безконтактного, динамічного, твердого, визначення, спосіб, тіла
Формула / Реферат:
1. Спосіб безконтактного динамічного визначення профілю (Р) твердого тіла (1, 1а), зокрема визначення зносу, що виник на твердому тілі (1, 1а), при цьому тверде тіло (1, 1а) являє собою обертально-симетричне колесо (1а) транспортного засобу, в основному, циліндричної або кільцеподібної основної форми, в якому щонайменше один створений лазерним пристроєм (2) світловий промінь, розширений до лінійної світлової смуги (3, 3а, 3b, 3с, 3c1, 3с2,...
Спосіб виділення зависі, зокрема, з метою обробки стічних вод, і пристрій для його здійснення
Номер патенту: 78702
Опубліковано: 25.04.2007
Автори: Мацкрле Сватоплук, Драчка Ольдржич, Мацкрле Владімір
МПК: B01J 8/18, B01D 37/00, C02F 1/52
Мітки: завіси, виділення, стічних, спосіб, метою, здійснення, обробки, вод, зокрема, пристрій
Формула / Реферат:
1. Спосіб виділення зависі, зокрема, з метою обробки стічних вод, у якому завись, здатна осаджуватися у вигляді пластівців, виділяється з рідини фільтрацією у киплячому завислому шарі осаду, де з цієї виділеної зависі утворюються пластівці, а стан псевдокипіння підтримується за рахунок потоку рідини, що піднімається вгору, при цьому рідина із зависсю входить у киплячий шар з боку дна, а рідина, звільнена від зависі, зливається вище поверхні...
Спосіб поверхневої обробки твердого тіла
Номер патенту: 19436
Опубліковано: 25.12.1997
Автор: Третяков Іван Григорович
МПК: C22C 22/00
Мітки: спосіб, обробки, тіла, поверхневої, твердого
Формула / Реферат:
Способ поверхностной обработки твердого тела путем взаимодействия его поверхности с углеводородной средой, включающий воздействие электромагнитного поля на углеводородную жидкость, отличающийся тем, что модификацию поверхностно твердого тела проводят при взаимодействии ее с углеводородной жидкостью, содержащей молекулы с p-связями, которую предварительно обрабатывают электромагнитным полем интенсивностью 280-480 кА/м.
Спосіб керування примежовим шаром при обтіканні потоком твердого тіла за рахунок подачі струму газу
Номер патенту: 15562
Опубліковано: 17.07.2006
Автор: Сімаков Микола Андрійович
МПК: F15D 1/00
Мітки: подачі, тіла, рахунок, твердого, струму, керування, потоком, газу, шаром, примежовим, спосіб, обтіканні
Формула / Реферат:
Спосіб керування примежовим шаром при обтіканні потоком твердого тіла за рахунок подачі струму газу, який полягає в тому, що газ підводять до конфузорного сопла, формуюючи струмінь, обертають його і, вприскуючи у потік, стабілізують його, який відрізняється тим, що збільшується довжина активного відрізку струменя у примежовому шарі, турбулентність зменшується, зростає швидкість двофазного потоку і він стає більш стабільним.
Спосіб визначення зміни внесків структурного та температурного розупорядкування в урбахівську енергію твердого кристалічного тіла при фазовому переході першого роду
Номер патенту: 31018
Опубліковано: 25.03.2008
Автор: Студеняк Ігор Петрович
МПК: G01K 7/00
Мітки: розупорядкування, твердого, енергію, кристалічного, тіла, зміни, структурного, спосіб, роду, першого, температурного, фазовому, визначення, урбахівську, переході, внесків
Формула / Реферат:
Спосіб визначення зміни внесків структурного та температурного розупорядкування в урбахівську енергію твердого кристалічного тіла при фазовому переході першого роду, який включає визначення внесків структурного та температурного розупорядкування шляхом температурних досліджень краю оптичного поглинання твердих кристалічних тіл, який відрізняється тим, що визначають зміну урбахівської енергії DЕU при температурі фазового переходу першого роду...
Попередній патент: Білкова система і харчові продукти, що містять її
Наступний патент: Підтримка передачі обслуговування для мереж, що мають різні протоколи встановлення каналу зв’язку
Випадковий патент: Спосіб прогнозування ризику виникнення порушень серцевого ритму у хворих на хронічне обструктивне захворювання легень