Багатолезова пилка для різання блоків з граніту або інших твердих матеріалів та спосіб різання таких блоків
Формула / Реферат
1. Багатолезова пилка з вертикальною рамою для різання блоків (18) з граніту або інших твердих матеріалів, яка має раму (19), що утримує леза (20) і яку виконано з можливістю здійснення зворотно-поступального і коливного руху для визначення криволінійної траєкторії різання блока (18), яка відрізняється тим, що раму (19), яка утримує леза, встановлено з можливістю зворотно-поступального переміщення на незалежній коливній рамі (40), виконаній з можливістю надання коливного руху так, що кожне лезо (20) рами (19), яка утримує леза, завжди знаходиться у контакті з блоком (18), а контактна зона рухається випуклою, криволінійною траєкторією, причому коливну раму (40) встановлено так, що її вертикальне переміщення обмежене бічним зачіпним засобом (53), призначеним для зачеплення із взаємодійним засобом (54), виконаним на нерухомій конструкції пилки, а бокове переміщення обмежене додатковими взаємодійними ковзними бічними зачіпними засобами (58, 59).
2. Багатолезова пилка за п. 1, яка відрізняється тим, що випукла, криволінійна траєкторія має приблизно круглу форму.
3. Багатолезова пилка за п. 1 або 2, яка відрізняється тим, що коливне переміщення рами (19), яка утримує леза, отримане комбінацією поздовжніх проходів і поворотів коливної підтримуючої рами (40).
4. Багатолезова пилка за будь-яким з попередніх пунктів, яка відрізняється тим, що раму (19), яка утримує леза, встановлено з можливістю направлення у своєму зворотно-поступальному русі чотирма цілісними з нею контрнапрямними, а саме двома верхніми (22) і двома нижніми (21) напрямними, сполученими з чотирма відповідними напрямними, а саме двома верхніми (23) і двома нижніми (24), виконаними за одне ціле з коливною рамою (40).
5. Багатолезова пилка за будь-яким з попередніх пунктів, яка відрізняється тим, що коливне переміщення коливної рами (40), яка підтримує раму (19), що утримує леза, отримане чотирма системами шатунів і осей, двома верхніми (25, 27) і двома нижніми (26, 28), які урухомлюються єдиною системою (32) з двигуном.
6. Багатолезова пилка за п. 5, яка відрізняється тим, що два повідних пальці (41) двох верхніх шатунів (25) мають середній кут на відповідних дисках (43), який є протилежним до середнього кута двох повідних пальців (42) на відповідних дисках (44) двох нижніх шатунів (26).
7. Багатолезова пилка за п. 6, яка відрізняється тим, що верхні диски (43) і нижні диски (44) з'єднані відповідними синхронізуючими стягелями (39), які шарнірно з'єднано відповідно з верхніми пальцями (46) і нижніми пальцями (47).
8. Багатолезова пилка за будь-яким з попередніх пунктів, яка відрізняється тим, що коливне переміщення коливної рами (40), яка утримує раму (19), що утримує леза, є несинхронним із зворотно-поступальним рухом рами (19), що утримує леза.
9. Багатолезова пилка за будь-яким одним з попередніх пунктів, яка відрізняється тим, що вісь між двигуном (32) і чотирма системами шатунів і осей зменшує або збільшує кут коливання шатунів (25, 26).
10. Багатолезова пилка за будь-яким з попередніх пунктів, яка відрізняється тим, що система опору блока (18) є рамою з пластинами (50).
11. Спосіб різання блоків (18) з граніту або інших твердих матеріалів багатолезовою пилкою за будь-яким з попередніх пунктів, який відрізняється тим, що раму (19), яка утримує леза (20), зворотно-поступально переміщують відносно коливної рами (40), а коливній рамі (40) надають коливного руху її поздовжніми рухами і поворотами, так що збільшується тиск на леза (20), які завжди знаходяться у контакті з блоком (18), а контактна зона безперервно переміщується вздовж випуклої, криволінійної траєкторії, причому вертикальне переміщення коливної рами (40) обмежують бічним зачіпним засобом (53), призначеним для зачеплення із взаємодійним засобом (54), виконаним на нерухомій конструкції пилки, а бокове переміщення обмежують додатковими взаємодійними ковзними бічними зачіпними засобами (58, 59).
Текст
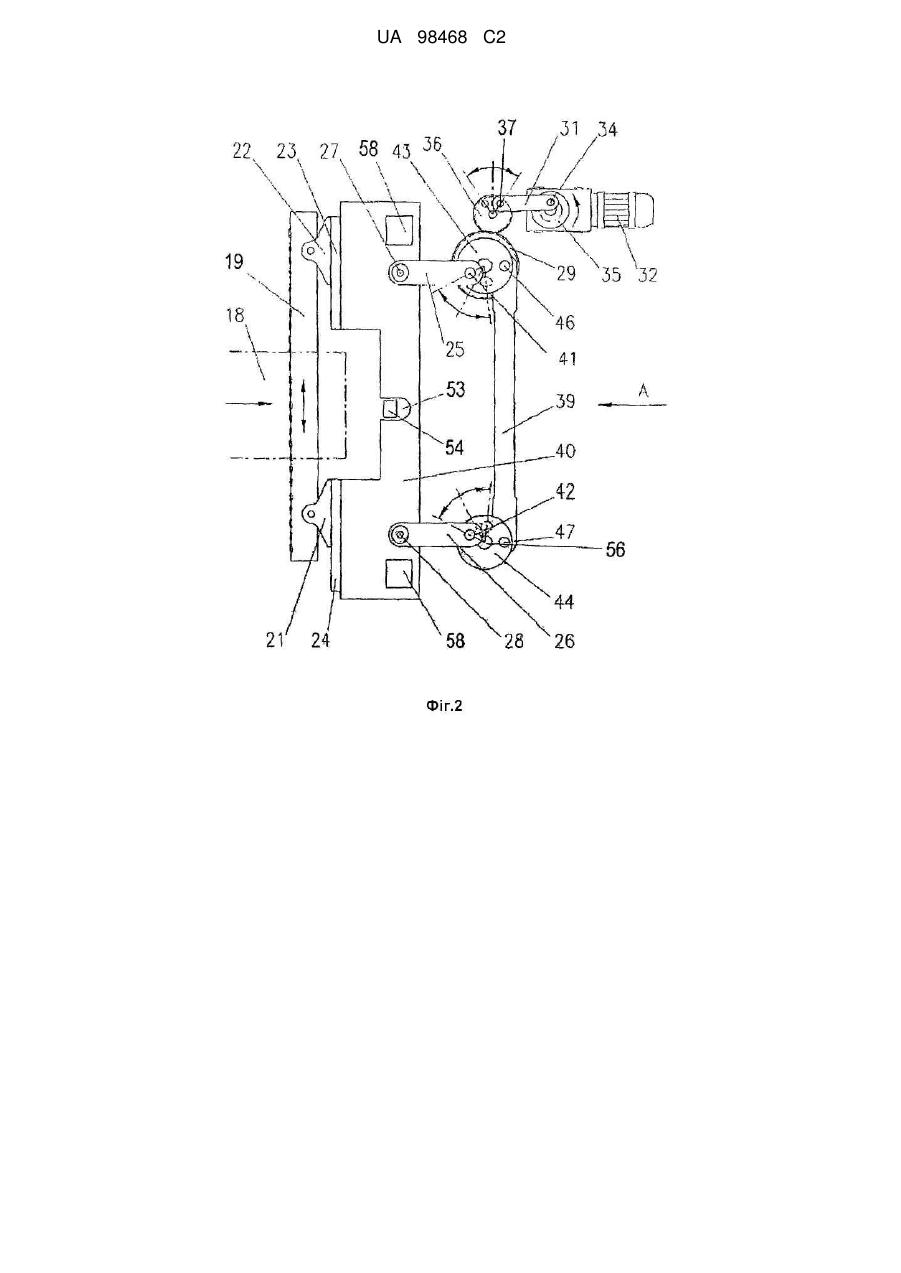
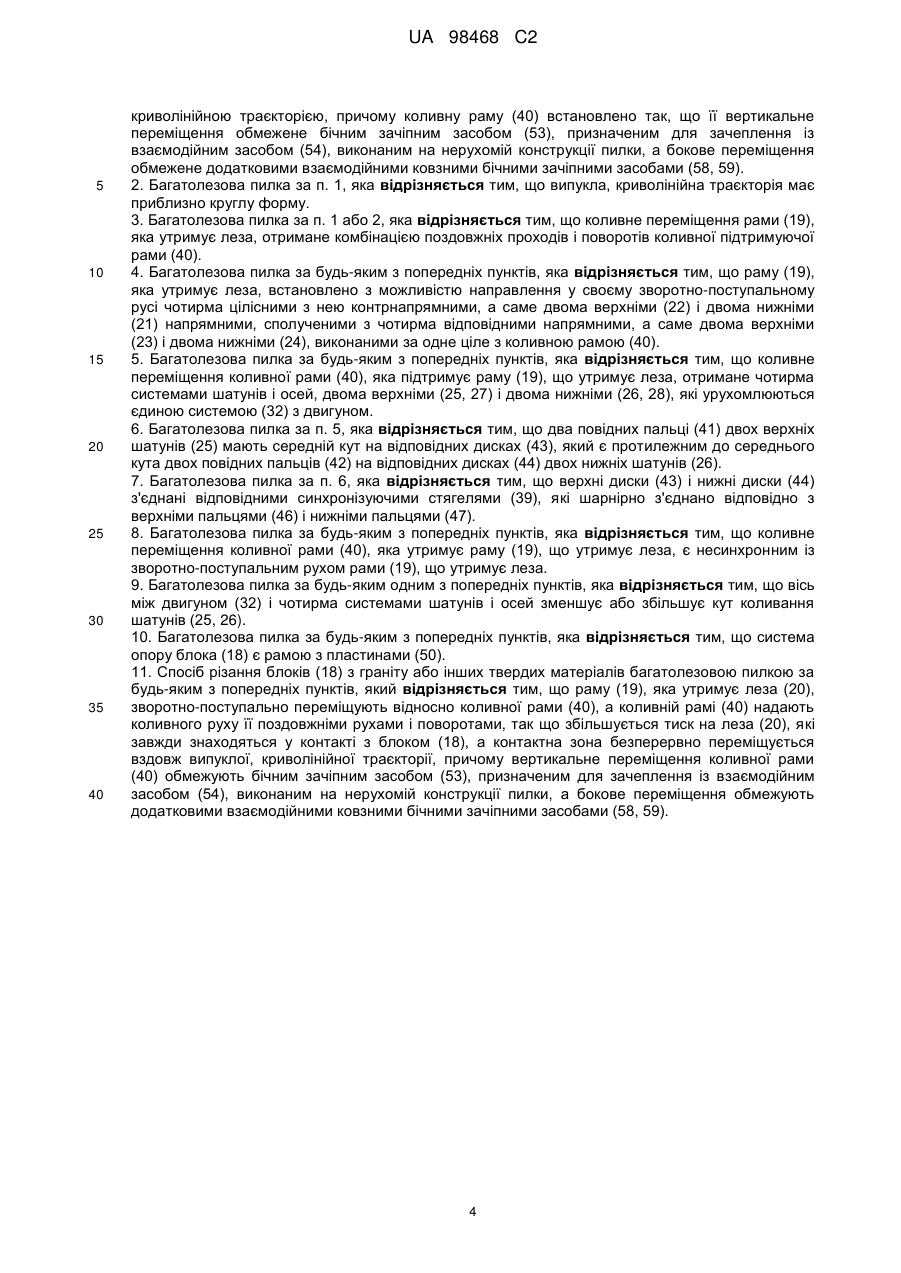
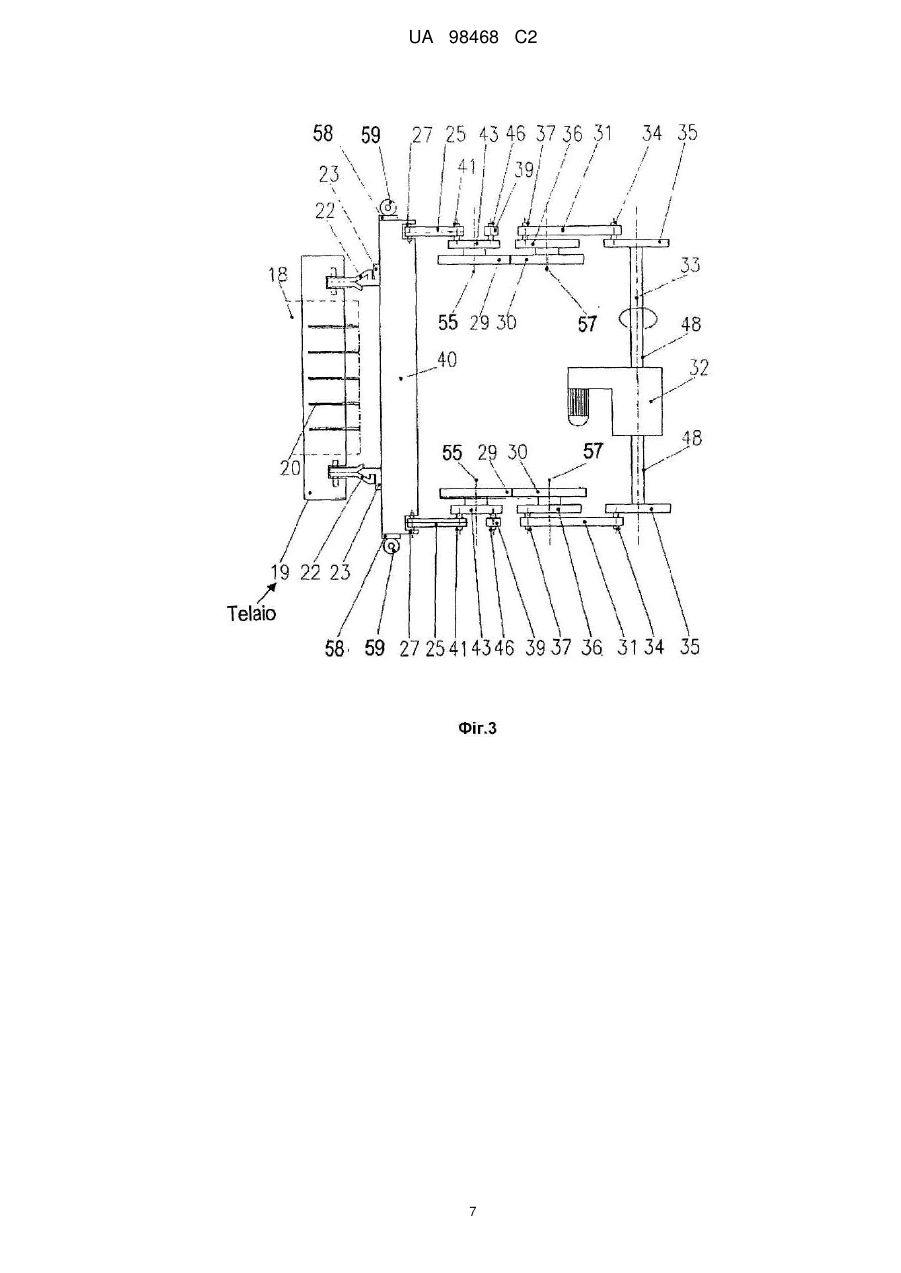
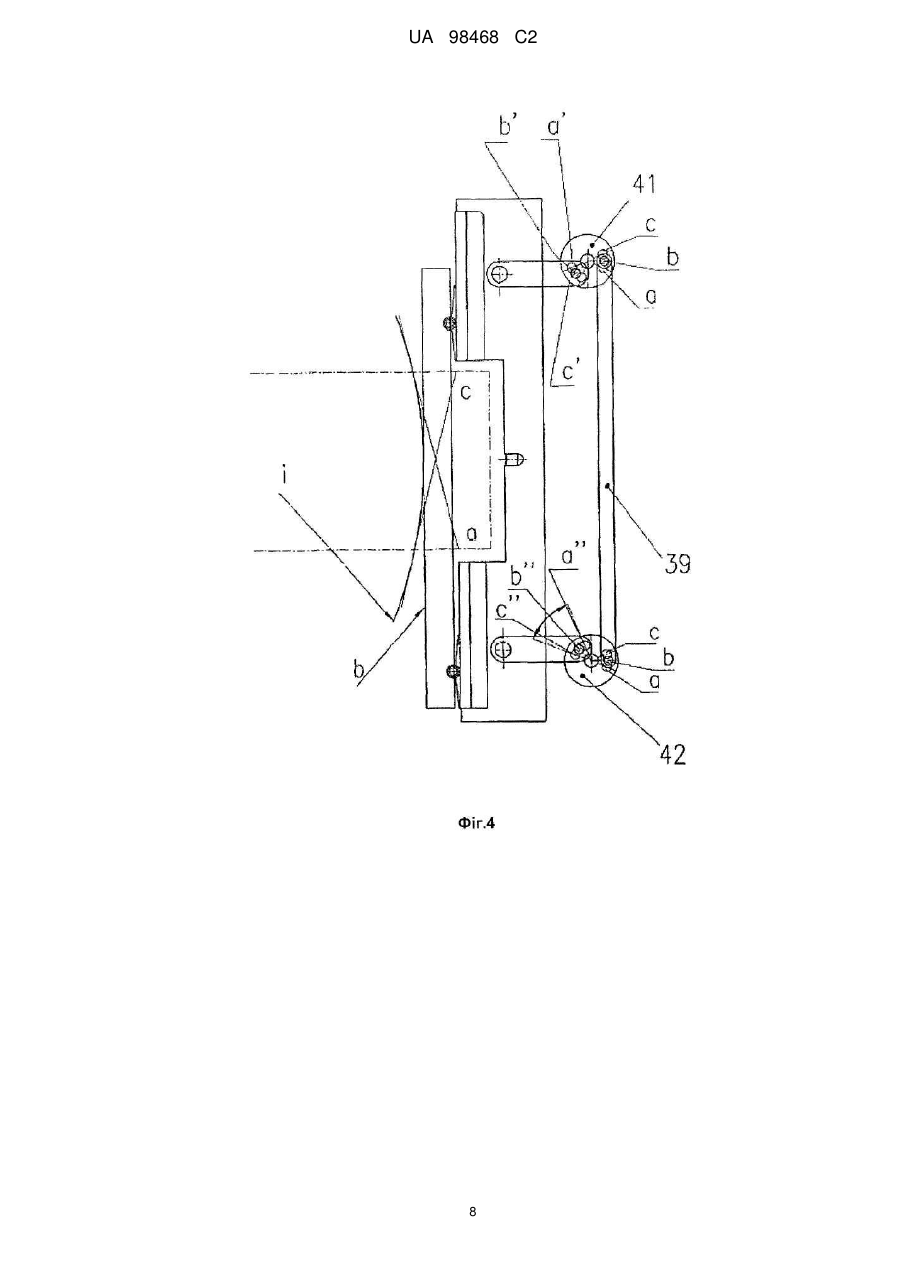
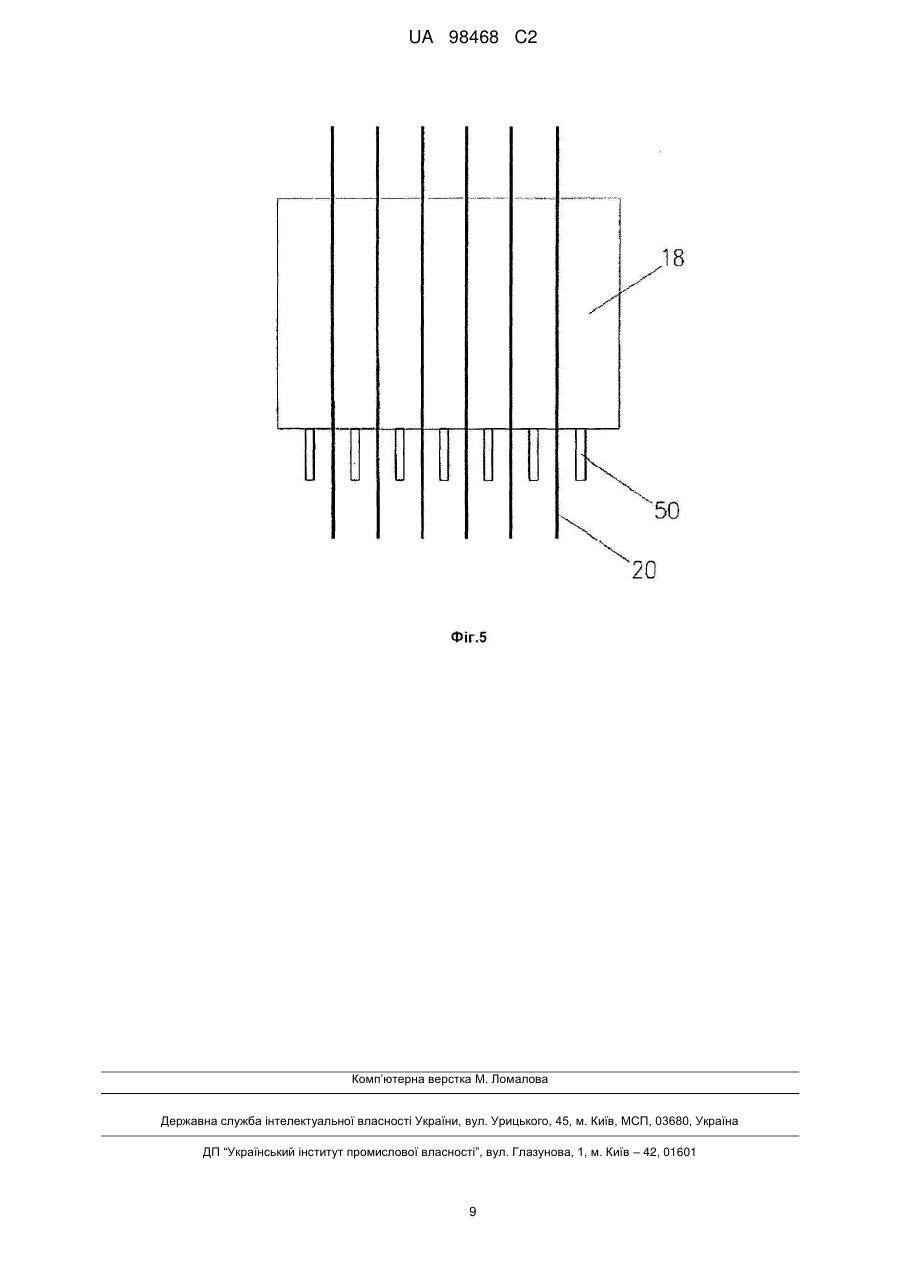
Реферат: Багатолезова пилка з вертикальною рамою для різання граніту або інших твердих матеріалів, яка має раму (19), що утримує леза і яка встановлена з можливістю зворотно-поступального переміщення на незалежній коливній рамі (40), яка передає коливне переміщення до неї, так що кожне лезо (20) рами (19), яка утримує леза, завжди знаходиться у контакті з оброблюваним виробом (18), а контактна зона рухається вздовж випуклої, криволінійної траєкторії. UA 98468 C2 (12) UA 98468 C2 UA 98468 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до багатолезової пилки для різання гранітних блоків або блоків з інших твердих матеріалів, яка виконує різання шляхом комбінування зворотно-поступального руху рами з коливним переміщенням напрямних рами, так що зона контакту між лезом і блоком рухається по дузі, що приблизно має форму кола. Винахід також стосується відповідного способу різання. Існують машини для різання мармуру, в яких приблизно лінійний зворотно-поступальний рух рами комбінують з горизонтальною подачею блоку. Ця комбінація переміщень між рамою і блоком мармуру створює достатньо постійний, але достатньо низький, питомий тиск, і ці умови навантаження дають лезам певну опуклість відносно блоку, яку частково компенсують шляхом попереднього навантаження лез стягелями, встановленими ексцентрично з лезами. Під час різання граніту питомий контактний тиск леза повинен бути значно вищим, ніж той, що є достатнім для мармуру або інших матеріалів. Для цього контактна зона між лезом і гранітом повинна бути обмеженою, але це перешкоджає лінійному руху рами з лезами. Якби можна було підтримувати лінійний вертикальний рух під час різання граніту, і підтримувати достатньо високу швидкість подачі блока, то це призвело б до поступового викривлення леза, оскільки навантаження було б зосереджено на верхньому і нижньому кінцях блоку і це незабаром призвело б до руйнування леза. В патенті ЕР-0334831 описано механічну пилку з вертикальною пильною рамою, в якій рама, яка утримує леза, здійснює зворотно-поступальний рух і шарнірно прикріплена у чотирьох кутах до блоків, зачеплених з відповідними повзунами, що обмежує переміщення багатолезової пилки. Ці повзуни змонтовано з можливістю ковзати відносно рами багатолезової пилки, причому кожний повзун має можливість ковзати вздовж відповідної пари поперечних напрямних по траєкторії, перпендикулярній напрямку ковзання повзунів. Нижні і верхні повзуни рухаються в протилежних напрямках, спричиняючи коливний рух рами, яка утримує леза, навколо горизонтальної середньої осі. В результаті цього різальні леза визначають траєкторію різання у вигляді овалу з наростаючим радіусом кривини. Основною метою зазначеного патенту є забезпечення роботи половини леза під час руху догори, а іншої половини під час руху донизу на відміну від попередніх відомих рішень, де лезо повністю виконує роботу під час руху в одному напрямку. В документі WO 99/42267 описано механічну пилку з горизонтальною рамою і розкрито різні способи різання - з кутовим контуром або дуговим контуром. Під час різання дуговим контуром леза піднімають над блоком протягом частини робочого циклу, що складає приблизно половину шляху повного циклу. Конструктивно, пилка має махове колесо із шатуном і кривошипним механізмом для надання рамі, що утримує леза, зворотно-поступального лінійного руху і з ексцентриком або кривошипною системою для коливного переміщення напрямної рами, яка підтримує раму з лезами. Ексцентрики можуть мати різні фази відносно махового колеса і їх (зворотні) швидкості обертання можуть бути змінені відносно швидкостей махового колеса в залежності від бажаної траєкторії контакту з блоком, який потрібно різати. Кожний ексцентрик завжди обертається у тому самому напрямку і передає поздовжній, а також коливний рух напрямній рамі. Метою винаходу є створення нової системи переміщень у багатолезовій пилці, яка підвищує контактний тиск між лезом і гранітом, або, взагалі, заготовкою, якщо матеріалом не є граніт, шляхом обмеження довжини зони контакту між лезом і матеріалом, при утримуванні загальної міцності в межах величин, які забезпечують допустимі навантаження і деформації леза. Подальшою метою винаходу є створення нової системи переміщень у багатолезовій пилці, яка безперервно і періодично переміщує зону контакту між лезом і блоком вздовж всієї його висоти. Ще однією метою винаходу є створення нової системи переміщень у багатолезовій пилці, де знос леза розподіляється по його довжині. Кожної зазначеної мети та будь-якої іншої мети, які стануть більш зрозумілими з наступного опису, досягають багатолезовою пилкою і способом різання нею згідно з винаходом, який характеризується ознаками, наведеними у незалежних пунктах відповідно 1 і 11 формули винаходу. Переважні втілення винаходу описано у залежних пунктах формули винаходу. По суті, багатолезова пилка згідно з винаходом має наступні характеристики: - багатолезова пилка характеризується зворотно-поступальним рухом із застосуванням шатуна та кривошипної системи з маховим колесом; 1 UA 98468 C2 5 10 15 20 25 30 35 40 45 50 55 60 - рама здійснює коливний рух, який змушує лезо під час його зворотнопоступального руху пересуватись прямолінійно по дотичній до приблизно дугової кривої лінії; - коливний рух рами не є синхронним із зворотно-поступальним рухом лез і, як результат, контактна зона між лезом і заготовкою рухається вздовж леза та висоти заготовки не синхронно з вертикальним зворотно-поступальним рухом; отже момент звернення зворотно-поступального руху безперервно переміщується на різні горизонтальні положення вздовж леза і різні вертикальні положення на блоці. Термін "багатолезова пилка для різання блоків" у даному описі стисло означає механічну пилку для різання блоків, яку обладнано рамою, що утримує леза і яка виконує зворотнопоступальний рух. Термін "багатолезова пилка" або "рама, яка утримує леза" означає пристрій, що складається з лез і конструкції, яка тримає і попередньо навантажує леза. Термін "зворотно-поступальний рух рами" означає рух, переданий рамі, який змушує її рухатись по напрямних. Термін "коливний рух рами" означає сумісний поперечний і обертальний рух, який змінює положення і орієнтацію рами відносно заготовки, так що контактна зона рухається по дузі приблизно колової опуклої форми. Термін "блок" означає заготовку, яка загалом має форму паралелепіпеду і виготовлену з граніту або іншого матеріалу. Винахід далі описано прикладами не обмежуючого переважного втілення з посиланнями на креслення, на яких: Фіг. 1 є схематичним зображенням рами, яка приводиться у зворотнопоступальний рух на нерухомих напрямних. Фіг. 2 є схематичним зображенням бокового вигляду механізму, який надає рамі коливного руху. Фіг. 3 є схематичним зображенням вигляду зверху механізму, який надає рамі коливного руху, де деякі частини показано у положенні, що відрізняється від зображення на фіг. 2 для більшої ясності. Фіг. 4 ілюструє створення коливного руху рами. Фіг. 5 є зображенням вигляду по стрільці А на фіг. 2 опори для блока і системи подачі блока. Фіг. 1 ілюструє зворотно-поступальний рух рами 19 з лезами 20 (фіг. 3), які зображено у крайньому верхньому положенні. Під час вертикального коливання леза переміщуються між цим положенням і найнижчим положенням 11. Цей зворотно-поступальний рух звичайно створюється шатуном і кривошипним механізмом. Рама разом з лезами 20 здійснює лінійне переміщення, яке направляється чотирма лінійними напрямним, дві з яких, а саме напрямні 23 і 24, розміщено на одному боці. Ці напрямні закріплено на нерухомій частині конструкції машини або на коливній рамі 40, про що буде описане далі. Дві контрнапрямні 22 і 21 змонтовано на одному боці зазначених напрямних і ще дві - на іншому боці. На кресленні показано тільки один бік рами, але слід пам'ятати, що є також дві інші напрямні на протилежному боці з двома відповідними контрнапрямними. Під час зворотно-поступального руху блок 18 просувається у напрямку, показаному стрілкою. Рама 19 з лезами, до яких прикріплено алмазні сегменти 16, рухається практично лінійно, оскільки чотири напрямні є вертикальними і їх зафіксовано на конструкції. На фіг. 2 та 3 показано, як забезпечується коливне переміщення рами. Рама 19 з лезами 20 направляється чотирма контрнапрямними (двома верхніми контрнапрямними 22 і двома нижніми контрнапрямними 21), які з'єднано із чотирма напрямними (двома верхніми напрямними 23 і двома нижніми напрямними 24). Всі чотири напрямні закріплено на коливній рамі 40, яку в свою чергу урухомлюють горизонтально два верхніх шатуна 25 і два нижніх шатуна 26 через дві відповідні верхні осі 27 і дві відповідні нижні осі 28, причому її вертикальне переміщення обмежено присутністю на обох боках двох заглиблень 53, які зачіплюються з двома дисками 54, а переміщення у боковому напрямку обмежено чотирма зафіксованими колісчатами 59 (фіг. 3), які спираються на чотири пластини 58 на коливній рамі. Тому коливну раму урухомлюють у поздовжньому напрямку два шатуна 25 наверху через дві осі 27 і два шатуна 26 внизу через дві осі 28, які попарно здійснюють такі переміщення. Два верхні шатуна з'єднано з повідними пальцями 41, а два нижні з'єднуючі важелі зачеплені з повідними пальцями 42 і обертаються відповідно з двома верхніми дисками 43 і двома нижніми дисками 44, які вільно обертаються навколо суміщених відповідно верхніх осей 55 і нижніх осей 56. Слід зауважити, що верхні повідні пальці 41 рухаються в іншому квадранті ніж нижні повідні пальці 42 і що їх обертання обмежене присутністю двох синхронізуючих стягелів 39, які з'єднано з дисками 43 та 44 через два верхніх пальця 46 і два нижні пальця 47. Верхні диски 43, які 2 UA 98468 C2 5 10 15 20 25 30 35 40 45 50 вільно обертаються навколо осі 45, є коаксіальними з двома шестернями 29, які зачеплено з повідними шестернями 30 фіг. 3), які нерухомо з'єднано з дисками 36, що вільно обертаються навколо осей 57. Диски 36 мають пальці 37, з допомогою яких шатуни 31 на одному кінці з'єднані з дисками 36, а на другому кінці через пальці 34 з'єднані з дисками 35, які вільно обертаються навколо осі 33. Два диски 35 (правий і лівий) з'єднані один з одним валом 48, який забезпечує обертання з допомогою двигуна 32 з редуктором. Оскільки ексцентриситет пальців 34 на дисках 35 є значно меншим, ніж ексцентриситет пальців 37 на дисках 36, то пальці 34 здійснюють повне, безперервне обертання, а пальці 37 здійснюють кутові коливання, які у будь-якому разі мають амплітуду менше 180 градусів. Амплітуда кутового коливання правого і лівого дисків 36 є меншою на величину відношення між кількістю зубців шестерень 29 і 30, отримуючи кутове коливання повідних пальців 41 на дисках 43, які мають бажану амплітуду. Нижні повідні пальці 42, нерухомо з'єднані з дисками 44, явно здійснюють таке ж кутове коливання у протилежному напрямку, завдяки дії синхронізуючих стягелів 39. На фіг.4 показано, як досягається приблизно коловий обгинальний рух лез в залежності від коливного руху рами. Коливний рух рами створюється кутовими коливаннями двох пальців шатунів 25 і 26, які примушують коливну раму коливатися. Середнє положення b', в якому знаходяться два верхніх повідні пальці 41 відносно верхнього диска 43, є протилежним середньому положенню b", в якому знаходяться два нижніх повідні пальці 42 відносно відповідного диска 44. Внаслідок чого, диски, обертаючись в одному напрямку, наприклад, по годинниковій стрілці, рухають верхні повідні пальці 41 до положення а', що спричиняє переміщення рами вперед в напрямку оброблюваного блоку, а нижні пальці 42 рухаються до положення а", що спричиняє переміщення рами в зворотному напрямку. Але, амплітуди рухів є різними, тому що пальці рухаються по колу, і горизонтальне переміщення рами є пропорціональним косинусу кута: Хі = R cos(o+d) Xs=R cos(o-d), де o - середній кут, а d - обертовий шлях, R - ексцентриситет пальця, а Хі та Xs відповідно рух у нижній частині і верхній частині. Так само, коли два диски обертаються проти годинникової стрілки, верхній палець рухається до положення с' і спричиняє рух рами назад, а нижній палець рухається до положення с" і спричиняє рух рами вперед. Результатом таких рухів є те, що кутові коливання, передані рамі, забезпечують переміщення лінії дії лез так, що ця лінія є дотичною до кривої, форма якої наближена до дуги. Радіус кривини залежить від наявних геометричних факторів, наприклад, середнього кута o руху дискових пальців, амплітуди кутових коливань навколо зазначеної середньої величини і довжини шатунів, але його можна легко визначити заздалегідь, і можливо змінювати, моделюючи переміщення на комп'ютері. На фіг. 5 показано вигляд машини спереду, який ілюструє систему, що забезпечує зближення блока 18 з рамою і утримує блок; система утворена групою пластин 50, які чергуються з різальними лезами 20. Пластини 50 нерухомо підтримують блок по всій його довжині і також забезпечують рух подачі для різання блока. Мета винаходу, щодо створення багатолезової пилки для різання граніту і мармуру, який дозволяє підвищення тиску леза в місті контакту з матеріалом, досягається новим рішенням, що є об'єктом винаходу, яке зменшує довжину зони контакту між лезом і блоком. Мета винаходу, щодо створення системи переміщення рами, яка дозволяє рухати контактну зону по криволінійній траєкторії, в якій лезо рухається несинхронно із зворотно-поступальним рухом рами, також досягається. В описі винаходу було показано і описано переважні втілення винаходу, але на практиці можуть бути виготовлені робочі варіанти в межах, захищених цим патентом. ФОРМУЛА ВИНАХОДУ 55 60 1. Багатолезова пилка з вертикальною рамою для різання блоків (18) з граніту або інших твердих матеріалів, яка має раму (19), що утримує леза (20) і яку виконано з можливістю здійснення зворотно-поступального і коливного руху для визначення криволінійної траєкторії різання блока (18), яка відрізняється тим, що раму (19), яка утримує леза, встановлено з можливістю зворотно-поступального переміщення на незалежній коливній рамі (40), виконаній з можливістю надання коливного руху так, що кожне лезо (20) рами (19), яка утримує леза, завжди знаходиться у контакті з блоком (18), а контактна зона рухається випуклою, 3 UA 98468 C2 5 10 15 20 25 30 35 40 криволінійною траєкторією, причому коливну раму (40) встановлено так, що її вертикальне переміщення обмежене бічним зачіпним засобом (53), призначеним для зачеплення із взаємодійним засобом (54), виконаним на нерухомій конструкції пилки, а бокове переміщення обмежене додатковими взаємодійними ковзними бічними зачіпними засобами (58, 59). 2. Багатолезова пилка за п. 1, яка відрізняється тим, що випукла, криволінійна траєкторія має приблизно круглу форму. 3. Багатолезова пилка за п. 1 або 2, яка відрізняється тим, що коливне переміщення рами (19), яка утримує леза, отримане комбінацією поздовжніх проходів і поворотів коливної підтримуючої рами (40). 4. Багатолезова пилка за будь-яким з попередніх пунктів, яка відрізняється тим, що раму (19), яка утримує леза, встановлено з можливістю направлення у своєму зворотно-поступальному русі чотирма цілісними з нею контрнапрямними, а саме двома верхніми (22) і двома нижніми (21) напрямними, сполученими з чотирма відповідними напрямними, а саме двома верхніми (23) і двома нижніми (24), виконаними за одне ціле з коливною рамою (40). 5. Багатолезова пилка за будь-яким з попередніх пунктів, яка відрізняється тим, що коливне переміщення коливної рами (40), яка підтримує раму (19), що утримує леза, отримане чотирма системами шатунів і осей, двома верхніми (25, 27) і двома нижніми (26, 28), які урухомлюються єдиною системою (32) з двигуном. 6. Багатолезова пилка за п. 5, яка відрізняється тим, що два повідних пальці (41) двох верхніх шатунів (25) мають середній кут на відповідних дисках (43), який є протилежним до середнього кута двох повідних пальців (42) на відповідних дисках (44) двох нижніх шатунів (26). 7. Багатолезова пилка за п. 6, яка відрізняється тим, що верхні диски (43) і нижні диски (44) з'єднані відповідними синхронізуючими стягелями (39), які шарнірно з'єднано відповідно з верхніми пальцями (46) і нижніми пальцями (47). 8. Багатолезова пилка за будь-яким з попередніх пунктів, яка відрізняється тим, що коливне переміщення коливної рами (40), яка утримує раму (19), що утримує леза, є несинхронним із зворотно-поступальним рухом рами (19), що утримує леза. 9. Багатолезова пилка за будь-яким одним з попередніх пунктів, яка відрізняється тим, що вісь між двигуном (32) і чотирма системами шатунів і осей зменшує або збільшує кут коливання шатунів (25, 26). 10. Багатолезова пилка за будь-яким з попередніх пунктів, яка відрізняється тим, що система опору блока (18) є рамою з пластинами (50). 11. Спосіб різання блоків (18) з граніту або інших твердих матеріалів багатолезовою пилкою за будь-яким з попередніх пунктів, який відрізняється тим, що раму (19), яка утримує леза (20), зворотно-поступально переміщують відносно коливної рами (40), а коливній рамі (40) надають коливного руху її поздовжніми рухами і поворотами, так що збільшується тиск на леза (20), які завжди знаходяться у контакті з блоком (18), а контактна зона безперервно переміщується вздовж випуклої, криволінійної траєкторії, причому вертикальне переміщення коливної рами (40) обмежують бічним зачіпним засобом (53), призначеним для зачеплення із взаємодійним засобом (54), виконаним на нерухомій конструкції пилки, а бокове переміщення обмежують додатковими взаємодійними ковзними бічними зачіпними засобами (58, 59). 4 UA 98468 C2 5 UA 98468 C2 6 UA 98468 C2 7 UA 98468 C2 8 UA 98468 C2 Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюBlock-cutting gangsaw for cutting granite or other hard materials and corresponding cutting method
Автори англійськоюGodi Alessandro
Назва патенту російськоюМноголезвийная пила для резки блоков из гранита или других твердых материалов и способ резки таких блоков
Автори російськоюГоди Алессандро
МПК / Мітки
МПК: B28D 1/06
Мітки: пилка, граніту, багатолезова, блоків, різання, матеріалів, спосіб, таких, інших, твердих
Код посилання
<a href="https://ua.patents.su/11-98468-bagatolezova-pilka-dlya-rizannya-blokiv-z-granitu-abo-inshikh-tverdikh-materialiv-ta-sposib-rizannya-takikh-blokiv.html" target="_blank" rel="follow" title="База патентів України">Багатолезова пилка для різання блоків з граніту або інших твердих матеріалів та спосіб різання таких блоків</a>
Верстат для оконтурення і розпилювання великогабаритних блоків твердих матеріалів
Номер патенту: 20317
Опубліковано: 15.03.2002
Автор: Аврамчук Ростислав Никифорович
МПК: B28D 1/02
Мітки: матеріалів, оконтурення, твердих, великогабаритних, верстат, розпилювання, блоків
Формула / Реферат:
Станок для оконтурення і розпилювання великогабаритних блоків (монолітів), укомплектований рамою, приводом, столом і робочим органом з чотирма блочками та ріжучим інструментом - алмазно-канатною пилкою, який відрізняється тим, що рама-естакада, на котрій розміщений стіл зі змінюваним за допомогою домкрата і продовжньої осі кутом нахилу відносно площини різання, змонтована на опорі де також встановлені передня і задня вертикальні стійки, між...
Малогабаритний настільний станок для різання напівпровідникових та інших матеріалів
Номер патенту: 54782
Опубліковано: 25.11.2010
Автори: Запаров Сергій Федорович, Анатичук Лук'ян Іванович, Німчук Віталій Васильович
МПК: B28D 5/04, H01L 21/475, H01L 21/461
Мітки: різання, інших, напівпровідникових, настільний, матеріалів, станок, малогабаритний
Формула / Реферат:
1. Малогабаритний настільний верстат струнного різання напівпровідникових та інших матеріалів, на основі станини, каретки з ріжучим інструментом, керуючими і контролюючими елементами, який відрізняється тим, що містить напрямні з підшипниковим ковзанням, виконані з можливістю зворотно-поступального руху.2. Малогабаритний настільний верстат струнного різання за п. 1, який відрізняється тим, що ріжучий інструмент складається з каретки...
Пилка для розпилювання каменю, мармуру, дерева та інших матеріалів, типу стрічкової пилки або подібного типу, з можливістю встановлення ріжучого полотна в різні положення
Номер патенту: 94587
Опубліковано: 25.05.2011
Автор: Даріо Марко
МПК: B23D 53/00, B23D 55/00, B28D 1/08
Мітки: пилки, подібного, стрічкової, мармуру, можливістю, каменю, встановлення, типу, ріжучого, пилка, різні, матеріалів, розпилювання, полотна, дерева, інших, положення
Формула / Реферат:
1. Пилка типу стрічкової або подібного типу для розпилювання каменю, мармуру, дерева, скла та інших матеріалів з ріжучою площиною, з можливістю встановлення в різні положення і розпилювання таких матеріалів вздовж прямолінійних горизонтальних вертикальних та похилих напрямків з різними контурами, що складається з вертикально розташованої металевої станини приблизно трикутної або іншої форми, оснащеної щонайменше одним рухомим ріжучим...
Спосіб і пристрій для відокремлення у сухому стані в’язкопружних матеріалів, таких як пластмаси, від матеріалів, що розщеплюються на волокна під дією механічного навантаження,таких як папір
Номер патенту: 44849
Опубліковано: 15.03.2002
Автори: Шнеттлер Хайнц Райнер, Фарбах Герхард
МПК: B03B 1/00, B29B 17/02, B07B 1/18
Мітки: механічного, пластмаси, навантаження,таких, матеріалів, в'язкопружних, папір, дією, відокремлення, таких, волокна, розщеплюються, стані, спосіб, сухому, пристрій
Формула / Реферат:
1. Спосіб відокремлення у сухому стані в'язкопружних матеріалів, таких як пластмаси та каучук, від матеріалів, що розщеплюються на волокна під дією механічного навантаження, зокрема паперу, при цьому розщеплювані матеріали піддають дії значних сил радіального, аксіального і тангенціального прискорення та сил зіткнення і потік матеріалу, що містить волокна, відводять окремо від потоку в'язкопружного матеріалу, який відрізняється тим, що...
Спосіб різання брусків з твердих матеріалів на пластини дротяною пилою та дротяна пила для здійснення цього способу
Номер патенту: 53642
Опубліковано: 17.02.2003
Автор: Войтеховскі Карел
МПК: B23D 57/00, B28D 5/04
Мітки: пилою, дротяна, матеріалів, пластини, твердих, спосіб, способу, цього, пила, брусків, різання, дротяною, здійснення
Формула / Реферат:
(21) 98094713 (57) 1. Спосіб різання брусків з твердих матеріалів на пластини з використанням дії абразивного матеріалу, який додають у сипучому стані, та дії "безконечного" твердого носія, який періодично спрямовують у зворотному напрямку і який, внаслідок того, що його спрямовують по периферійних жолобах співвісних роликів системи роликів, створює різальний вузол, через який примусово подають матеріал, який має бути...
Попередній патент: Консервування та контрольована доставка/вивільнення сперматозоїдів
Наступний патент: Бобінотримач
Випадковий патент: Пристрій для міжостистої стабілізації хребта