Спосіб вимірювання гіроскопічною системою
Формула / Реферат
1. Спосіб вимірювання гіроскопічною системою, який щонайменше передбачає:
- перший засіб вимірювання кута у вигляді вібраційного гіроскопа, здатного змінювати свою позицію вібрації всередині множини позицій вібрації і виконувати перше вимірювання кутових величин відносно вимірювальних осей в одній з позицій вібрації зазначеної множини позицій вібрації, причому цей перший засіб вимірювання має перший початок відліку величини кута; та
- другий засіб вимірювання кута, здатний виконувати друге вимірювання кутових величин відносно зазначених вимірювальних осей, причому це друге вимірювання має другий початок відліку величини кута; а
зазначений спосіб вимірювання включає такі операції в порядку урахування зміни позиції вібрації першого засобу вимірювання кута:
(а) протягом першого періоду часу - одночасне надання перших кутових величин першим засобом вимірювання кута, що вібрує у поточній позиції вібрації із множини позицій вібрації, і других кутових величин другим засобом вимірювання кута, і виведення з них відкоригованих других кутових величин узгодженням другого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом зазначеного першого періоду часу;
(б) протягом другого періоду часу - впорядкування зміни першої позиції вібрації першим засобом вимірювання кута від поточної позиції до іншої позиції вібрації із зазначеної множини позицій вібрації;
(в) протягом третього періоду часу - одночасне надання перших кутових величин першим засобом вимірювання кута і других кутових величин другим засобом вимірювання кута і виведення відкоригованих перших кутових величин узгодженням першого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом зазначеного третього періоду часу.
2. Спосіб вимірювання за п. 1, в якому гіроскопічна система надає наступні кутові величини:
до початку і протягом операції (а) та після операції (в) кутові величини надає перший засіб вимірювання кута;
протягом операцій (б) і (в) кутові величини надає другий засіб вимірювання кута.
3. Спосіб вимірювання за будь-яким з попередніх пунктів, в якому зміну позиції вібрації першого засобу вимірювання кута згідно з операціями від (а) до (в) послідовно повторюють декілька разів.
4. Спосіб вимірювання за п. 1, в якому зазначена гіроскопічна система має ціле число N вібраційних гіроскопів, яке більше або дорівнює 3; при цьому N гіроскопів здатні змінювати свої позиції вібрації всередині множини позицій вібрації і виконувати відповідні вимірювання кутових величин відносно відповідних вимірювальних осей в відповідних позиціях вібрації зазначеної множини позицій вібрації таким чином, що перший засіб вимірювання взаємодіє з будь-яким із N вібраційних гіроскопів, а другий засіб вимірювання взаємодіє з будь-яким набором N-1 інших вібраційних гіроскопів системи і здатний виконувати вимірювання кута відносно вимірювальної осі першого засобу вимірювання і відносно другого початку відліку.
5. Спосіб вимірювання за п. 4, в якому щонайменше дві вимірювальної осі перпендикулярні.
6. Спосіб вимірювання за п. 4, в якому N дорівнює 3 і зазначені три вібраційні гіроскопи мають відповідно попарно компланарні і не колінеарні вимірювальні осі.
7. Спосіб вимірювання за п. 4, в якому N дорівнює 3, а зазначені три гіроскопи розташовані в одній площині так, що відповідні вимірювальні осі створюють кут, який по суті дорівнює 120°.
8. Спосіб вимірювання за п. 4, в якому N дорівнює 4, а зазначені чотири гіроскопи розташовані в просторі так, що їхні відповідні вимірювальні осі орієнтовані відносно чотирьох трисектрис простору.
9. Спосіб вимірювання за п. 4, в якому N дорівнює 4, а зазначені чотири вібраційні гіроскопи мають потрійно не компланарні і подвійно не колінеарні вимірювальні осі.
10. Спосіб вимірювання за будь-яким з попередніх пунктів, в якому позиції вібрації в множині позицій вібрації послідовно відокремлені кутом, величина якого відповідна 360°, поділеним на ціле число.
11. Спосіб вимірювання за будь-яким з попередніх пунктів, в якому позиції вібрації в множині позицій вібрації визначені так, щоб розподілити позиції вібрації між 0 та 2π радіанами.
12. Спосіб вимірювання за будь-яким з попередніх пунктів, в якому перші і/або другі відкориговані кутові величини отримані з урахуванням також коефіцієнта масштабування.
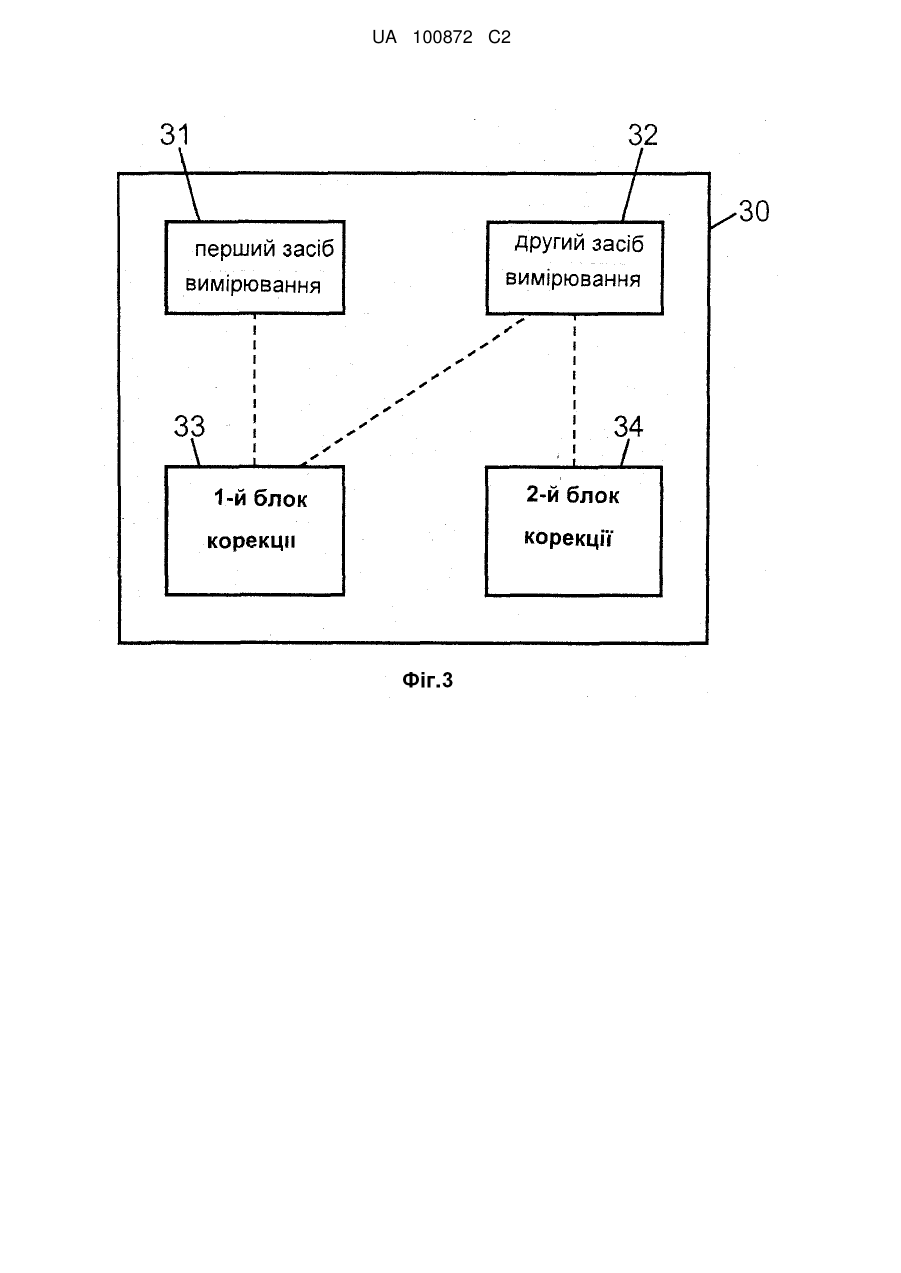
13. Гіроскопічна система, яка щонайменше має:
- перший засіб вимірювання кута у вигляді вібраційного гіроскопа, здатного змінювати свою позицію вібрації всередині множини позицій вібрації і виконувати перше вимірювання кутових величин відносно вимірювальних осей в одній з позицій вібрації зазначеної множини позицій вібрації, причому цей перший засіб вимірювання має перший початок відліку величини кута і надає першу величину; та
- другий засіб вимірювання кута, здатний виконувати друге вимірювання кутових величин відносно зазначених вимірювальних осей, причому це друге вимірювання має другий початок відліку величини кута і надає другу величину; і
зазначена гіроскопічна система також додатково містить:
- блок корекції других кутових величин, придатний для надання відкоригованих других кутових величин узгодженням другого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом деякого періоду часу;
- блок корекції перших кутових величин, придатний для надання відкоригованих перших кутових величин узгодженням першого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом іншого періоду часу;
при цьому зазначені блоки корекції перших і других кутових величин працюють протягом зміни позиції вібрації щонайменше першого засобу вимірювання кута.
14. Гіроскопічна вимірювальна система за п. 13, в якій зазначені кутові величини поперемінно надавані першим засобом вимірювання кута та другим засобом вимірювання кута протягом часу зміни позиції вібрації першого засобу вимірювання кута.
15. Гіроскопічна вимірювальна система за п. 13 або 14, яка має ціле число N вібраційних гіроскопів, яке більше або дорівнює 3;
при цьому N гіроскопів здатні змінювати свої позиції вібрації всередині множини позицій вібрації і виконувати відповідні вимірювання кутових величин відносно відповідних вимірювальних осей в відповідних позиціях вібрації зазначеної множини позицій вібрації таким чином, що перший засіб вимірювання кута взаємодіє з будь-яким із N вібраційних гіроскопів;
- другий засіб вимірювання взаємодіє з будь-яким набором N-1 інших вібраційних гіроскопів системи і здатний виконувати вимірювання кута відносно вимірювальної осі першого засобу вимірювання і відносно другого початку відліку.
16. Гіроскопічна вимірювальна система за п. 15, в якій N дорівнює 3, а зазначені три вібраційні гіроскопи мають відповідно попарно компланарні не колінеарні вимірювальні осі.
17. Гіроскопічна вимірювальна система за п. 15, в якій N дорівнює 3, а зазначені три гіроскопи розташовані в одній площині так, що відповідні вимірювальні осі створюють кут, який по суті дорівнює 120°.
18. Гіроскопічна вимірювальна система за п. 15, в якій N дорівнює 4, а зазначені чотири вібраційні гіроскопи розташовані в просторі так, що їхні відповідні вимірювальні осі орієнтовані відносно чотирьох трисектрис простору.
19. Гіроскопічна вимірювальна система за п. 15, в якій N дорівнює 4, а зазначені чотири вібраційні гіроскопи мають потрійно не компланарні і подвійно не колінеарні вимірювальні осі.
Текст
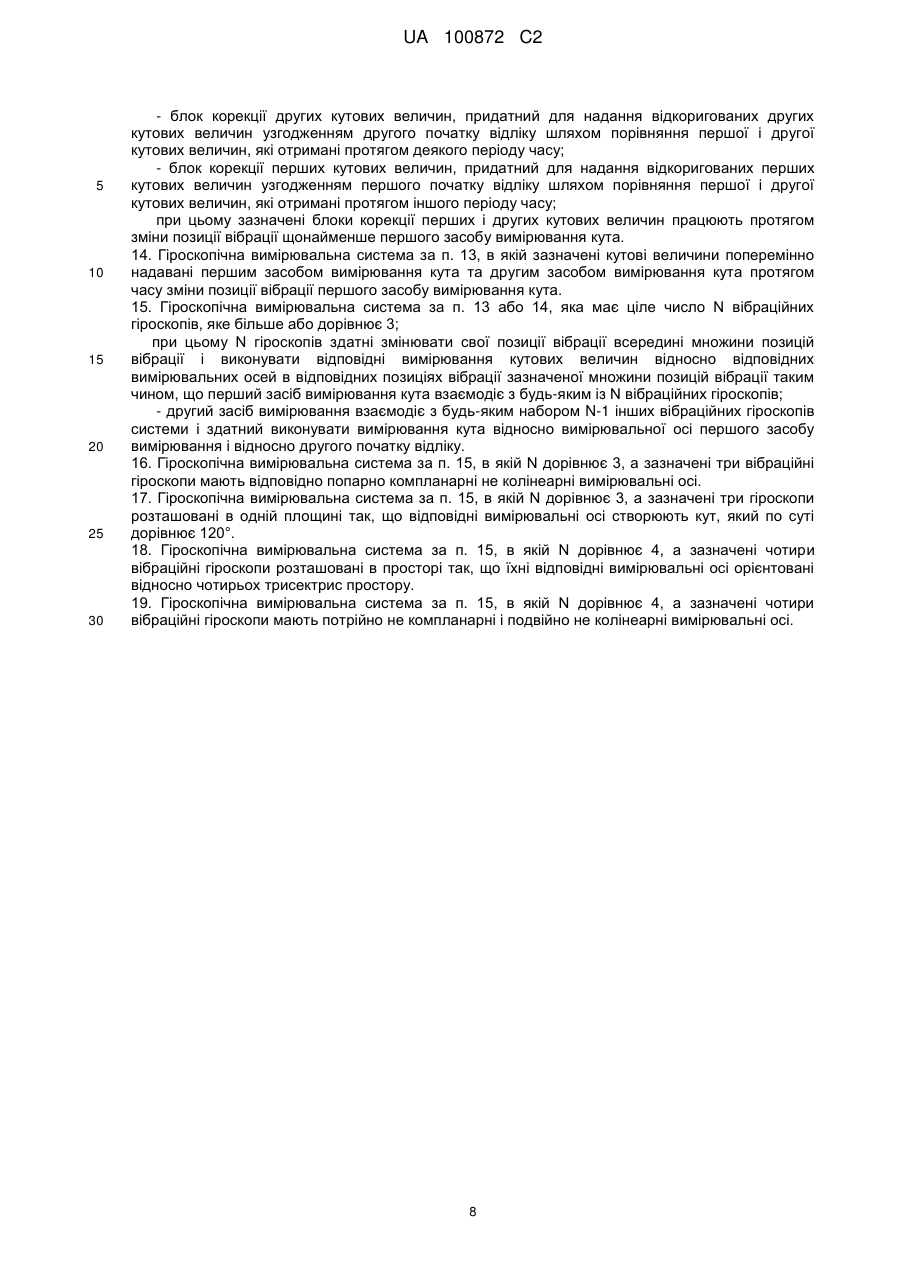
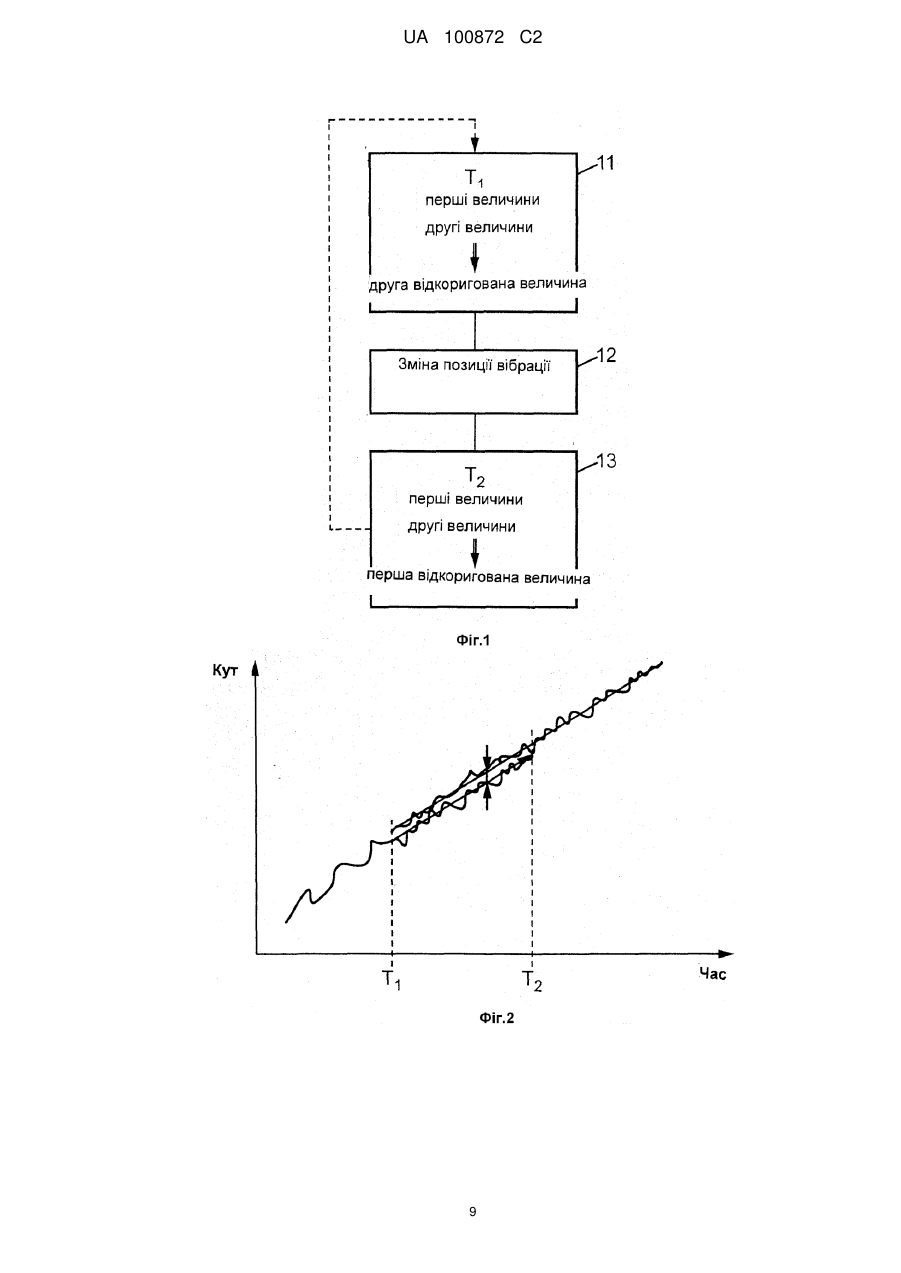
Реферат: Гіроскопічна система має щонайменше два засоби вимірювання кута у вигляді вібраційних гіроскопів, здатних змінювати свої позиції вібрації всередині множини таких позицій і виконувати перше і друге вимірювання кутових величин відносно вимірювальних осей в одній з позицій вібрації зазначеної множини і відносно окремих початків відліку; та блоки корекції зазначених кутових величин узгодженням початків відліку шляхом порівняння першої і другої кутових величин. Система призначена для вимірювання кутів повороту в інерційних системах навігації, якими оснащені сучасні транспортні засоби. UA 100872 C2 (12) UA 100872 C2 UA 100872 C2 5 10 15 20 25 30 35 40 45 50 55 60 Галузь техніки Цей винахід відноситься до вібраційних гіроскопів, принцип дії яких базується на ефекті Коріоліса, а більш конкретно - до точності вимірювання обертальних кутових величин, що надають гіроскопи такого типу. Такі вібраційні гіроскопи зазвичай використовують в інерціальних системах навігації, як-то, наприклад, в гіроскопічному компасі, що запроектований для кутових вимірювань відносно відповідного напрямку, зокрема на географічний Північний полюс. Рівень техніки Вісесиметричні гіроскопи типу Коріолісового Вібраційного Гіроскопу (КВГ), наприклад, типу Напівсферичного Резонансного Гіроскопу (НВГ), що більш узагальнено позначають як тип 1, відомі із публікації Andrei M. Shkel «Type I and Type II micromachined vibratory gyroscopes», pages 586-593, IEEE/ION (Institute of Electrical and Electronic Engineers/Institute of Navigation' PLANS 2006, San Diego, CA, USA)». Вони працюють в незамкненому контурі і дають змогу вимірювати абсолютні кути обертання на основі вимірювання кута, що представляє позицію вібрації гіроскопу відносно вимірювальних електродів. Такі гіроскопи можна також використовувати в замкнених контурах для відстеження позиції вібрації шляхом завдання прецесії, як це зокрема описано в FR 2 755 227. В такому випадку позицію вібрації гіроскопу утримують як фіксовану позицію, а вимірювання виводять із завдання, яке необхідно застосовувати для утримування гіроскопу в цій фіксованій позиції вібрації. Такий тип роботи називають також «гіроскопічний зворотний зв’язок». Величини, надавані цим фізичним вимірюванням, надалі недовго відповідають куту, але саме швидкості обертання. Вимірювання, виконувані такими вібраційними гіроскопами, можуть бути погіршені похибками, які по суті обумовлені позицією вібрації щодо вимірювальних електродів. Тому ці похибки можуть змінюватися залежно від позиції вібрації. Ці похибки можуть впливати на точність вимірюваних таким чином величин. Відповідно було б корисно знайти засоби їх зменшення, щоб вдосконалити використання гіроскопу такого типу. В частині функціонування замкнених контурів або інших також гірометричних процесів в EP 1 752 733 описаний спосіб, що має на меті зменшення таких похибок, які впливають на вимірювані величини, і, таким чином, підвищення ефективність роботи таких вимірювальних пристроїв. З цією метою симетричність зазначених похибок таких швидкісних гіроскопів між двома позиціями вібрації зазначених швидкісних гіроскопів на кутовій відстані 90° використовують як вихідну точку для зменшення середньої величини цих похибок шляхом впорядкування зміни позиції вібрації цих швидкісних гіроскопів між двома позиціями вібрації, рознесеними на 90°. Зазначений документ передбачає використання протягом відрізку часу переміщення від однієї позиції вібрації до іншої позиції вібрації другого гіроскопу в замкненому контурі для вимірювання швидкості обертання замість першого швидкісного гіроскопу, коли він знаходиться в процесі зміни позиції вібрації, а тому не може надавати релевантні результати вимірювання швидкості обертання. Проте слід зауважити, що вимірювання, надавані швидкісним гіроскопом як таким, відносно вимірювань, надаваних гіроскопом, що працює сам по собі в відкритому контурі, погіршують точність надаваного вимірювання, яке тісно пов’язане з невизначеністю, що обумовлена трансформацією, і тому повинна бути врахована в завданні для отримання швидкості обертання. Суть винаходу Запропонований винахід має на меті подолання зазначених недоліків. Втілення цього запропонованого винаходу стосується гіроскопів 1-го типу. Запропонований винахід має на меті вдосконалення ситуації. В першому аспекті винаходу запропонований спосіб вимірювання з використанням гіроскопічної системи, який щонайменше має: - перший засіб вимірювання кута у вигляді вібраційного гіроскопу, здатного змінювати свою позицію вібрації всередині множини позицій вібрації і виконувати перше вимірювання кутових величин відносно вимірювальних осей в одній з позицій вібрації зазначеної множини позицій вібрації, причому цей перший засіб вимірювання має перший початок відліку величини кута; та - другий засіб вимірювання кута, здатний виконувати друге вимірювання кутових величин відносно зазначених вимірювальних осей, причому це друге вимірювання має другий початок відліку величини кута; а зазначений спосіб вимірювання включає такі операції в порядку урахування зміни позиції вібрації першого засобу вимірювання кута: 1 UA 100872 C2 5 10 15 20 25 30 35 40 45 50 55 60 (а) протягом першого періоду часу - одночасне надання перших кутових величин першим засобом вимірювання кута, що вібрує у поточній позиції вібрації із множини позицій вібрації, і других кутових величин другим засобом вимірювання кута, і виведення з них відкоригованих других кутових величин узгодженням другого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом зазначеного першого періоду часу; (б) протягом другого періоду часу - впорядкування зміни першої позиції вібрації першим засобом вимірювання кута від поточної позиції до іншої позиції вібрації із зазначеної множини позицій вібрації; (в) протягом третього періоду часу - одночасне надання перших кутових величин першим засобом вимірювання кута і других кутових величин другим засобом вимірювання кута й виведення відкоригованих перших кутових величин узгодженням першого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом зазначеного третього періоду часу. Завдяки цьому визначається позиція вібрації вібраційного гіроскопу, який застосований як перший засіб вимірювання кута, здатний обертатися тоді, як продовжується надавання релевантних вимірюваних кутових величин. В першу чергу, в такій системі перший та другий засоби вимірювання призначені для надавання кутових величин. Тому виникає така суттєва перевага, як можливість узгоджувати кутові величини, надавані першим засобом вимірювання або другим засобом вимірювання, з кутовими величинами, надаваними відповідно другим засобом вимірювання або першим засобом вимірювання. Наприкінці передбачено узгоджувати перший початок відліку першого засобу вимірювання або другий початок відліку другого засобу вимірювання відповідно з другим початком відліку другого засобу вимірювання або з першим початком відліку першого засобу вимірювання. Внаслідок такої дії кутові величини, кожна з яких узгоджена з іншою, можуть бути надавані протягом процесу зміни позиції вібрації вібраційного гіроскопу. Будь-які з двох вимірюваних кутових величин, які надають перший засіб вимірювання або другий засіб вимірювання, суттєво відкориговані щодо їх відповідно застосовуваних початків відліку. Таким чином тут виникає можливість впорядкувати зміну позиції вібрації вібраційного гіроскопу, що, відповідно, надає можливість усереднити похибки, пов’язані з кожною із позицій вібрації вібраційного гіроскопу, поки триває надання узгоджених між собою кутових величин. Слід зауважити, що досягнення такого узгодження вимірюваних величин неможливо з використанням системи, відомої із попереднього рівня техніки, оскільки вона стосується вимірювання швидкості обертання. Внаслідок такої роботи вимірювані похибки першого засобу вимірювання, які відносяться до позицій вібрації вібраційного гіроскопу, можуть бути переважно усереднені для різних позицій вібрації, використовуваних вібраційним гіроскопом. Вимірювання кута може бути виконано першим засобом вимірювання, який вібрує в першій позиції вібрації, а потім впорядкований під час переходу від першої позиції вібрації до другої позиції вібрації. Далі вимірювання кута може бути переважно виконано другим засобом вимірювання з наступною корекцією цих кутових величин відносно різних початків відліку першого і другого засобів вимірювання. Слід зауважити, що другий засіб вимірювання кута є будь-яким засобом вимірювання кута. Відповідно до таких умов вимірювання кута, виконуване вібраційним гіроскопом і надаване далі, інколи погіршено похибкою відносно першої позиції вібрації, а інколи погіршено похибкою відносно другої позиції вібрації Тут немає обмеження кількості позицій вібрації, в яких передбачено регулювання вібраційного гіроскопу. Під час зміни позицій вібрації операції від (а) до (в) можна переважно повторювати з метою отримання релевантних та узгоджених виміряних кутових величин згідно з одним із втілень запропонованого винаходу. Таким чином, гіроскопічна система може надавати наступні кутові величини: - перед і протягом операції (а) та після операції (в) надавати кутові величини першим засобом вимірювання кута; - протягом операцій (б) і (в) надавати кутові величини другим засобом вимірювання кута; Зміну позиції вібрації першого засобу вимірювання кута згідно з операціями від (а) до (в) послідовно повторюють декілька разів. Далі може бути передбачено, що у випадку, коли вібраційний гіроскоп здатний вібрувати в К послідовних позиціях вібрації, така зміна позиції вібрації дозволяє перехід від позиції вібрації «і» до позиції вібрації «і+1» для всіх «і» між 1 і К-1. При кожному повторенні операцій від (а) до (в) перша позиція вібрації співвідноситься з позицією вібрації, в якій вібраційний гіроскоп вібрує на 2 UA 100872 C2 5 10 15 20 25 30 35 40 45 50 55 60 останній виконуваній операції (в), а друга позиція вібрації співвідноситься з наступною позицією вібрації із заданої множини позицій вібрації. Зазначена гіроскопічна система може мати ціле число N вібраційних гіроскопів, яке більше або дорівнює 3. В цьому випадку N гіроскопів здатні змінювати свої позиції вібрації всередині множини позицій вібрації і виконувати відповідні вимірювання кутових величин відносно відповідних вимірювальних осей в відповідних позиціях вібрації зазначеної множини позицій вібрації. Перший засіб вимірювання може взаємодіяти з будь-яким із N вібраційних гіроскопів, а другий засіб вимірювання може взаємодіяти з будь-яким набором N-1 інших вібраційних гіроскопів системи і здатний виконувати вимірювання кута відносно вимірювальної осі першого засобу вимірювання і відносно другого початку відліку. При такій побудові системи вібраційних гіроскопів запропонований винахід може бути переважно використаний до всіх або деяких зазначених вібраційних гіроскопів поперемінно, оскільки перший засіб вимірювання може послідовно взаємодіяти з різними застосованими в системі вібраційними гіроскопами. Коли N дорівнює 3, зазначені три вібраційні гіроскопи можуть мати відповідно попарно компланарні і не колінеарні вимірювальної осі. В цьому випадку можуть бути передбачені перший дублет різних лінійних комбінацій, який дозволяє вираховувати кутові величини відносно перших вимірювальних осей, та другий дублет різних лінійних комбінацій, який дозволяє вираховувати кутові величини відносно других вимірювальних осей. Тоді спосіб вимірювання згідно з одним із втілень винаходу може бути застосований для кожного з таких дублетів лінійних комбінацій. Крім того, щонайменше дві вимірювальні осі можуть бути по суті перпендикулярні. Тоді за умови, що N дорівнює 3, зазначені три гіроскопи можуть бути розташовані в одній площині таким чином, що відповідні вимірювальної осі створюють кут, який по суті дорівнює о 120 . Якщо N дорівнює 4, зазначені чотири гіроскопи можуть бути розташовані в просторі таким чином, що їхні відповідні вимірювальної осі орієнтовані відносно чотирьох трисектрис простору. Якщо N дорівнює 4, зазначені чотири вібраційні гіроскопи мають потрійно не компланарні і подвійно не колінеарні вимірювальні осі. В цьому випадку можуть бути визначені перший дублет різних лінійних комбінацій, який дозволяє вираховувати кутові величини відносно перших вимірювальних осей, другий дублет різних лінійних комбінацій, який дозволяє вираховувати кутові величини відносно других вимірювальних осей та третій дублет різних лінійних комбінацій, який дозволяє вираховувати кутові величини відносно третіх вимірювальних осей. Тоді спосіб вимірювання згідно з одним із втілень винаходу може бути застосований для кожного з таких дублетів лінійних комбінацій. Крім того, позиції вібрації в множині позицій вібрації можуть бути послідовно відокремлені кутом, величина якого відповідна 360°, поділеним на ціле число. Зокрема, позиції вібрації в множині позицій вібрації можуть бути визначені так, щоб розподілити їх між 0 та 2 радіанами. Якщо вимірювальна система, яка має чотири вібраційні гіроскопи A, B, C і D, розташовані в просторі таким чином, що їх відповідні вимірювальні осі орієнтовані по суті згідно з чотирма трисектрисами простору, то дублети лінійних комбінацій серед їх чотирьох вимірювань, які відповідно позначені «a», «b», «c» і «d», використовують для відновлення трьох вимірювальних осей наступним чином: для першої вимірювальної осі X: a+b та -(c+d); для другої вимірювальної осі Y: b+c та -(a+d); і для третьої вимірювальної осі Z: a+c та -(b+d). Програми зміни позиції вібрації можуть бути виконувані послідовно для кожного вібраційного гіроскопа. Четвертий вібраційний гіроскоп повинен бути спроектований таким чином, щоб виконувалося наступне рівняння: a+b+c+d=0 Позиції вібрації в множині позицій вібрації можуть бути послідовно відокремлені кутом, величина якого відповідна 360°, поділеним на ціле число. Можна також впорядковувати позиції вібрації в множині позицій вібрації в реальному часі, о о щоб розподілити застосовувані позиції вібрації між 0 і 360 навіть тоді, коли ці позиції вібрації вже пройдені. 3 UA 100872 C2 5 10 15 20 25 30 35 40 45 50 55 60 Можна також передбачити отримання перших і/або других відкоригованих кутових величин з урахуванням також коефіцієнта масштабування. В другому аспекті винаходу запропонована гіроскопічна вимірювальна система, запроектована для виконання процедури згідно з першим аспектом цього винаходу. Вона щонайменше має: - перший засіб вимірювання кута у вигляді вібраційного гіроскопу, здатного змінювати свою позицію вібрації всередині множини позицій вібрації і виконувати перше вимірювання кутових величин відносно вимірювальних осей в одній з позицій вібрації зазначеної множини позицій вібрації, причому цей перший засіб вимірювання має перший початок відліку величини кута і надає першу величину; та - другий засіб вимірювання кута, здатний виконувати друге вимірювання кутових величин відносно зазначених вимірювальних осей, причому це друге вимірювання має другий початок відліку величини кута і надає другу величину; і зазначена гіроскопічна система також додатково містить: - блок корекції других кутових величин, придатний для надання відкоригованих других кутових величин узгодженням другого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом деякого періоду часу; - блок корекції перших кутових величин, придатний для надання відкоригованих перших кутових величин узгодженням першого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом іншого періоду часу; при цьому зазначені блоки корекції перших і других кутових величин працюють протягом зміни позиції вібрації щонайменше першого засобу вимірювання кута. Кутові величини можна з успіхом поперемінно надавати першим засобом вимірювання кута та другим засобом вимірювання кута протягом часу зміни позиції вібрації першим засобом вимірювання кута. Короткий опис креслень Інші ознаки і переваги винаходу стануть зрозумілими після читання наступного суто ілюстративного опису разом з доданими кресленнями, на яких: Фіг.1 показує основні операції способу вимірювання з використанням гіроскопічної системи згідно зі втіленням запропонованого винаходу; Фіг.2 показує зміну вимірюваних величин, які надає гіроскопічна система згідно зі втіленням запропонованого винаходу; а Фіг.3 показує гіроскопічну систему згідно зі втіленням запропонованого винаходу. Найкращі втілення винаходу Фіг.1 показує основні операції способу вимірювання з використанням гіроскопічної системи згідно зі втіленням запропонованого винаходу. Операція 11, виконувана в період часу Т 1, представляє собою надання засобами вимірювання кутів відповідно першої та другої кутових величин. На основі цих двох типів кутових величин виникає можливість корекції другої кутової величини і відповідного початку відліку та їх узгодження з першими кутовими величинами відносно до відповідного початку відліку. Таким чином можна забезпечити кутову послідовність величин, що надаються першим та другим засобами вимірювання. Внаслідок цього під час операції 12 вимірювальна система має можливість протягом зміни позиції вібрації вібраційного гіроскопу, який є першим засобом вимірювання кута, надавати узгоджені величини, тобто відкориговані кутові величини вимірювань, виконуваних другим засобом вимірювання кута. Надалі під час цієї зміни позиції вібрації можна або забезпечити протягом певного періоду часу продовження надання кутових величин другим засобом вимірювання, або надавати кутові величини знову першим засобом вимірювання, який вібрує тоді в різних позиціях вібрації. Цей певний період часу, протягом якого може бути бажаним надавання відкоригованих кутових величин, не обмежує обсяг прав згідно з винаходом. Під час операції 13 перші і другі кутові величини знову одночасно враховують для корекції перших кутових величин, надаваних першим засобом вимірювання, що вібрує у впорядкованій під час останньої зміни позиції вібрації. Фіг.2 показує зміну вимірюваних величин, які надає гіроскопічна система згідно зі втіленням запропонованого винаходу. Ця зміна кутових величин описана як функція від часу виконання зазначених операцій методу вимірювання. Зокрема, до початку періоду Т 1 кутові величини надає перший засіб вимірювання. Далі, між періодами Т1 та Т2 кутові величини, які надає перший засіб вимірювання і які надходять від 4 UA 100872 C2 5 10 15 20 25 30 35 40 45 50 55 60 другого засобу вимірювання, враховують для отримання відкоригованих других кутових величин на основі величин, надаваних другим засобом вимірювання. Тому цей період розглядається як період відновлення, який використовують для узгодження кутових величин, які надає система протягом всього часу. Далі, після закінчення періоду відновлення, можна вимірювати зміну позиції вібрації першого засобу вимірювання. Дійсно, вимірювальна система після цього надає відкориговані другі виміряні величини. Фіг.3 показує вимірювальну гіроскопічну систему згідно зі втіленням запропонованого винаходу. Ця система має: - вібраційний гіроскоп 31, який надає перші величини, та - другий засіб 32 вимірювання, який надає другі величини - блок корекції других кутових величин 34, придатний для надання відкоригованих других кутових величин узгодженням другого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом деякого періоду часу; - блок корекції перших кутових величин 33, придатний для надання відкоригованих перших кутових величин узгодженням першого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом іншого періоду часу; Блоки корекції перших і других кутових величин використовують протягом зміни позиції вібрації щонайменше першим засобом вимірювання кута. Множина позицій вібрації вібраційних гіроскопів може відповідати К різним позиціям. Ціле число К може бути обрано за умови отримання оптимальної ефективності. Тут слід зауважити, що удосконалення роботи шляхом усереднення похибок, пов’язаних з різними позиціями вібрації, згідно зі втіленням запропонованого способу вимірювання, може супроводжуватися погіршенням точності внаслідок поділу загальної тривалості вимірювання на декілька періодів вимірювання з послідовними змінами позиції вібрації серед К позицій вібрації. Роботу системи можна також поліпшити настроюванням співвідношення тривалості відновлення і періоду часу для переходу між двома позиціями вібрації. Це є суттю компромісу між вдосконаленням роботи, отримуваним шляхом усереднення похибок, пов’язаних з різними позиціями вібрації, і погіршенням точності роботи, яке обумовлене тим фактом, що при кожному включенні виникає похибка, пов’язана з шумом, присутнім в перших і других кутових величинах протягом періоду відновлення. Гіроскопічна вимірювальна система може містити кількість N вібраційних гіроскопів. N є ціле число, що більше або дорівнює 3. N гіроскопів запроектовані змінювати свої позиції вібрації в межах множини позицій вібрації і надавати відповідно виміряні кутові величини відносно відповідних вимірювальних осей в відповідних позиціях вібрації в межах зазначеної множини позицій вібрації. В цьому випадку перший засіб вимірювання може співвідноситись з будь-яким одним із N вібраційних гіроскопів, тоді як другий засіб вимірювання як такий співвідноситься з будь-яким набором із N-1 вібраційних гіроскопів системи, запроектованої для виконання вимірювання кутів відносно вимірювальної осі першого засобу вимірювання і другого початку відліку. В наведених нижче прикладах зазначені декілька можливих конфігурацій, але вони не обмежують застосування запропонованого винаходу. Наприклад, N дорівнює 3, і тоді зазначені три вібраційні гіроскопи можуть мати відповідно попарно компланарні і не колінеарні вимірювальні осі. Якщо N дорівнює 3, зазначені три гіроскопи можуть бути розташовані в одній площині так, о що відповідні вимірювальні осі створюють кут, який по суті дорівнює 120 . Якщо N дорівнює 4, зазначені чотири гіроскопи можуть бути розташовані в просторі так, що їхні відповідні вимірювальні осі орієнтовані відносно чотирьох трисектрис простору. Якщо N дорівнює 4, зазначені чотири вібраційні гіроскопи можуть мати потрійно не компланарні і подвійно не колінеарні вимірювальні осі. В одному із втілень запропонованого винаходу можна також передбачити, що другий засіб вимірювання має декілька вібраційних гіроскопів, в якій щонайменше один вібраційний гіроскоп здатний змінювати позицію вібрації і виконувати вимірювання кутових величин. Тоді кутове вимірювання, виконуване таким щонайменше одним вібраційним гіроскопом, може бути лінійною комбінацією кутової величини, надаваної іншим гіроскопом цього другого засобу вимірювання кута з метою узгодження другого вимірювання кутових величин відносно бажаних вимірювальних осей. В цьому випадку в складі способу вимірювання можна передбачити виконання додаткової операції. Зокрема, можна передбачити зміну позиції вібрації одного або більше з вібраційних 5 UA 100872 C2 5 10 15 20 25 30 35 40 45 50 гіроскопів другого засобу вимірювання кута від визначеної поточної позиції до іншої позиції вібрації із множини позицій вібрації. Крім того, другий засіб вимірювання може бути вібраційним гіроскопом, здатним змінювати позицію вібрації. Коли перший зазначений засіб вимірювання є вібраційним гіроскопом і другий зазначений засіб вимірювання є також вібраційним гіроскопом, може бути передбачено, щоб ці два вібраційні гіроскопи мали колінеарні вимірювальні осі. В наступних абзацах описано застосування запропонованого винаходу для потреб калібрування вібраційного гіроскопа всередині інерціального пристрою, що надає показники орієнтації. Для досягнення цієї мети передбачена гіроскопічна система, що складається з щонайменше чотирьох не колінеарних гіроскопів, три з яких виконують вимірювання під час, коли четвертий вібраційний гіроскоп калібрують. Операція калібрування включає зміну позиції вібрації вібраційного гіроскопу, який калібрують. Таким чином, допоки один з щонайменше чотирьох вібраційних гіроскопів знаходиться у процесі калібрування, вимірювання для визначення показників орієнтації виконують щонайменше три інші вібраційні гіроскопи. Більш точно, операція калібрування передбачає вібрацію у різних позиціях і виконання відповідних вимірювань для вібраційного гіроскопу, який калібрують. Цього надалі достатньо для вилучення із цих вимірювань реального обернення опори, виміряного трьома іншими гіроскопами. Цю операцію надалі послідовно повторюють для всіх вібраційних гіроскопів системи згідно зі втіленням запропонованого винаходу. Можна передбачити, щоб три вібраційні гіроскопи були орієнтовані відносно трьох звичайних трьох ортогональних осей, а четвертий вібраційний гіроскоп був орієнтований відносно трисектриси. Тому калібрування гіроскопів можна послідовно виконати наступним чином. Різницю D між гіроскопічним вимірюванням протягом калібрування і тим, що надано другим засобом вимірювання, який містить три інші вібраційні гіроскопи, обчислюють. Це обчислення D виконують протягом часу виконання команди на зміну позиції вібрації тим гіроскопом, що калібрують. D дозволяє точно визначити кут, за яким вібрація повернена, навіть тоді, коли фактор масштабування був використаний для генерування невідомої точно окремої зміни позиції вібрації. Це «прозоре» обернення, що виміряне гіроскопом під час калібрування, може бути потім вилучене із навігаційних розрахунків. Ці розрахунки виконуються також протягом періоду, коли вібрація орієнтована вліво від даної позиції. Таким чином, при виконанні команди на зміну позиції ця позиція вібрації може бути розділена на «k» позицій, а величина D записана для кожної з цих позицій. Відповідно, похибка вимірювання гіроскопу стає відомою як функція позиції вібрації, яка дозволяє коригувати дрейф похибки в гармонічній моді. Ці процедурні засоби у вигляді тих самих трьох гіроскопів, які уведені в три моделі корекції відповідної похибки, можуть бути завжди застосовані для навігації, оскільки виключається вплив нестаціонарного режиму на такі застосовувані для навігації гіроскопи. У випадках суттєвих переміщень опори, які порушують визначену позицію вібрації, бажано передбачити відмову від коригування дрейфової хвилі і затримку її до наступної послідовності. Промислова придатність Застосування принципів запропонованого винаходу в інерціальних пристроях і для калібрування вібраційних гіроскопів в таких інерціальних пристроях забезпечує можливість їх калібрування «прозорим» чином в будь-який час експлуатації. Дійсно, така гіроскопічна система може надавати показники орієнтації навіть тоді, коли один із вібраційних гіроскопів знаходиться в умовах калібрування. ФОРМУЛА ВИНАХОДУ 55 1. Спосіб вимірювання гіроскопічною системою, який щонайменше передбачає: - перший засіб вимірювання кута у вигляді вібраційного гіроскопа, здатного змінювати свою позицію вібрації всередині множини позицій вібрації і виконувати перше вимірювання кутових величин відносно вимірювальних осей в одній з позицій вібрації зазначеної множини позицій вібрації, причому цей перший засіб вимірювання має перший початок відліку величини кута; та 6 UA 100872 C2 5 10 15 20 25 30 35 40 45 50 55 60 - другий засіб вимірювання кута, здатний виконувати друге вимірювання кутових величин відносно зазначених вимірювальних осей, причому це друге вимірювання має другий початок відліку величини кута; а зазначений спосіб вимірювання включає такі операції в порядку урахування зміни позиції вібрації першого засобу вимірювання кута: (а) протягом першого періоду часу - одночасне надання перших кутових величин першим засобом вимірювання кута, що вібрує у поточній позиції вібрації із множини позицій вібрації, і других кутових величин другим засобом вимірювання кута, і виведення з них відкоригованих других кутових величин узгодженням другого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом зазначеного першого періоду часу; (б) протягом другого періоду часу - впорядкування зміни першої позиції вібрації першим засобом вимірювання кута від поточної позиції до іншої позиції вібрації із зазначеної множини позицій вібрації; (в) протягом третього періоду часу - одночасне надання перших кутових величин першим засобом вимірювання кута і других кутових величин другим засобом вимірювання кута і виведення відкоригованих перших кутових величин узгодженням першого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом зазначеного третього періоду часу. 2. Спосіб вимірювання за п. 1, в якому гіроскопічна система надає наступні кутові величини: до початку і протягом операції (а) та після операції (в) кутові величини надає перший засіб вимірювання кута; протягом операцій (б) і (в) кутові величини надає другий засіб вимірювання кута. 3. Спосіб вимірювання за будь-яким з попередніх пунктів, в якому зміну позиції вібрації першого засобу вимірювання кута згідно з операціями від (а) до (в) послідовно повторюють декілька разів. 4. Спосіб вимірювання за п. 1, в якому зазначена гіроскопічна система має ціле число N вібраційних гіроскопів, яке більше або дорівнює 3; при цьому N гіроскопів здатні змінювати свої позиції вібрації всередині множини позицій вібрації і виконувати відповідні вимірювання кутових величин відносно відповідних вимірювальних осей в відповідних позиціях вібрації зазначеної множини позицій вібрації таким чином, що перший засіб вимірювання взаємодіє з будь-яким із N вібраційних гіроскопів, а другий засіб вимірювання взаємодіє з будь-яким набором N-1 інших вібраційних гіроскопів системи і здатний виконувати вимірювання кута відносно вимірювальної осі першого засобу вимірювання і відносно другого початку відліку. 5. Спосіб вимірювання за п. 4, в якому щонайменше дві вимірювальні осі перпендикулярні. 6. Спосіб вимірювання за п. 4, в якому N дорівнює 3 і зазначені три вібраційні гіроскопи мають відповідно попарно компланарні і не колінеарні вимірювальні осі. 7. Спосіб вимірювання за п. 4, в якому N дорівнює 3, а зазначені три гіроскопи розташовані в одній площині так, що відповідні вимірювальні осі створюють кут, який по суті дорівнює 120°. 8. Спосіб вимірювання за п. 4, в якому N дорівнює 4, а зазначені чотири гіроскопи розташовані в просторі так, що їхні відповідні вимірювальні осі орієнтовані відносно чотирьох трисектрис простору. 9. Спосіб вимірювання за п. 4, в якому N дорівнює 4, а зазначені чотири вібраційні гіроскопи мають потрійно не компланарні і подвійно не колінеарні вимірювальні осі. 10. Спосіб вимірювання за будь-яким з попередніх пунктів, в якому позиції вібрації в множині позицій вібрації послідовно відокремлені кутом, величина якого відповідна 360°, поділеним на ціле число. 11. Спосіб вимірювання за будь-яким з попередніх пунктів, в якому позиції вібрації в множині позицій вібрації визначені так, щоб розподілити позиції вібрації між 0 та 2π радіанами. 12. Спосіб вимірювання за будь-яким з попередніх пунктів, в якому перші і/або другі відкориговані кутові величини отримані з урахуванням також коефіцієнта масштабування. 13. Гіроскопічна система, яка щонайменше має: - перший засіб вимірювання кута у вигляді вібраційного гіроскопа, здатного змінювати свою позицію вібрації всередині множини позицій вібрації і виконувати перше вимірювання кутових величин відносно вимірювальних осей в одній з позицій вібрації зазначеної множини позицій вібрації, причому цей перший засіб вимірювання має перший початок відліку величини кута і надає першу величину; та - другий засіб вимірювання кута, здатний виконувати друге вимірювання кутових величин відносно зазначених вимірювальних осей, причому це друге вимірювання має другий початок відліку величини кута і надає другу величину; і зазначена гіроскопічна система також додатково містить: 7 UA 100872 C2 5 10 15 20 25 30 - блок корекції других кутових величин, придатний для надання відкоригованих других кутових величин узгодженням другого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом деякого періоду часу; - блок корекції перших кутових величин, придатний для надання відкоригованих перших кутових величин узгодженням першого початку відліку шляхом порівняння першої і другої кутових величин, які отримані протягом іншого періоду часу; при цьому зазначені блоки корекції перших і других кутових величин працюють протягом зміни позиції вібрації щонайменше першого засобу вимірювання кута. 14. Гіроскопічна вимірювальна система за п. 13, в якій зазначені кутові величини поперемінно надавані першим засобом вимірювання кута та другим засобом вимірювання кута протягом часу зміни позиції вібрації першого засобу вимірювання кута. 15. Гіроскопічна вимірювальна система за п. 13 або 14, яка має ціле число N вібраційних гіроскопів, яке більше або дорівнює 3; при цьому N гіроскопів здатні змінювати свої позиції вібрації всередині множини позицій вібрації і виконувати відповідні вимірювання кутових величин відносно відповідних вимірювальних осей в відповідних позиціях вібрації зазначеної множини позицій вібрації таким чином, що перший засіб вимірювання кута взаємодіє з будь-яким із N вібраційних гіроскопів; - другий засіб вимірювання взаємодіє з будь-яким набором N-1 інших вібраційних гіроскопів системи і здатний виконувати вимірювання кута відносно вимірювальної осі першого засобу вимірювання і відносно другого початку відліку. 16. Гіроскопічна вимірювальна система за п. 15, в якій N дорівнює 3, а зазначені три вібраційні гіроскопи мають відповідно попарно компланарні не колінеарні вимірювальні осі. 17. Гіроскопічна вимірювальна система за п. 15, в якій N дорівнює 3, а зазначені три гіроскопи розташовані в одній площині так, що відповідні вимірювальні осі створюють кут, який по суті дорівнює 120°. 18. Гіроскопічна вимірювальна система за п. 15, в якій N дорівнює 4, а зазначені чотири вібраційні гіроскопи розташовані в просторі так, що їхні відповідні вимірювальні осі орієнтовані відносно чотирьох трисектрис простору. 19. Гіроскопічна вимірювальна система за п. 15, в якій N дорівнює 4, а зазначені чотири вібраційні гіроскопи мають потрійно не компланарні і подвійно не колінеарні вимірювальні осі. 8 UA 100872 C2 9 UA 100872 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement with gyroscopic system
Автори англійськоюLignon, Christian, Carre, Arnauld
Назва патенту російськоюСпособ измерения гироскопической системой
Автори російськоюЛиньон Кристиан, Карр Арно
МПК / Мітки
МПК: G01C 19/56
Мітки: спосіб, гіроскопічною, вимірювання, системою
Код посилання
<a href="https://ua.patents.su/12-100872-sposib-vimiryuvannya-giroskopichnoyu-sistemoyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання гіроскопічною системою</a>
Спосіб вимірювання діаметра циліндричних виробів оптико-електронною системою
Номер патенту: 79146
Опубліковано: 25.05.2007
Автори: Воробель Роман Антонович, Гапонюк Ярослав Васильович
МПК: G01B 11/08, G01B 11/30
Мітки: циліндричних, вимірювання, діаметра, спосіб, оптико-електронною, виробів, системою
Формула / Реферат:
Спосіб вимірювання діаметра циліндричних виробів оптико-електронною системою, який полягає в перетворенні фотоелектронного зображення двовимірної кривої на фоточутливій площині в дискретний набір його елементів, з яких формують групи по три елементи, який відрізняється тим, що до перетворення фотоелектронного зображення двовимірної кривої в дискретний набір елементів послідовно в часі формують світлову площину, освітлюють цією світловою...
Спосіб вимірювання свічення біологічних об’єктів у холодильнику з релейною системою термостабілізації
Номер патенту: 11485
Опубліковано: 25.12.1996
Автори: Барабой Вілен Абрамович, Срібная Алла Федорівна, Орел Валерій Емануїлович, Тацій Юрій Олексійович
МПК: G01J 1/44
Мітки: свічення, системою, релейною, термостабілізації, об'єктів, біологічних, спосіб, холодильнику, вимірювання
Формула / Реферат:
Способ измерения свечения биологических объектов в холодильнике с релейной системой термостабилизации путем периодического измерения светового потока, испускаемого биологическим объектом, внутри холодильника, отличающийся тем, что, с целью повышения точности, измерение светового потока осуществляют в моменты включения системы термостабилизации холодильника.
Тарілчастий дозатор-витратомір протруювача насіння з тензометричною системою вимірювання
Номер патенту: 54010
Опубліковано: 25.10.2010
Автори: Матвієвський Володимир Антонович, Пйонтик Людвіг Денисович, Добрянський Богдан Іванович
МПК: G01F 1/00
Мітки: системою, протруювача, дозатор-витратомір, вимірювання, тарілчастий, насіння, тензометричною
Формула / Реферат:
Тарілчастий дозатор-витратомір протруювача насіння з тензометричною системою вимірювання, що містить бункер насіння, трубчастий живильник, тарілку та її електропривід, який відрізняється тим, що з метою забезпечення вимірювання миттєвих значень витрати насіння в потоці, на виході із тарілки встановлені дві діаметрально протилежні тензометричні балочки, у яких один кінець виготовлений у вигляді площадки для сприйняття зусиль від насіння, а на...
Спосіб вимірювання розмірів в порожнині рота
Номер патенту: 46211
Опубліковано: 10.12.2009
Автори: Федорова Оксана Владиславівна, Мірза Олександр Іванович, Дорошенко Світлана Іванівна, Петрушанко Анатолій Михайлович, Петрушанко Павло Анатолійович
МПК: A61C 7/00
Мітки: спосіб, розмірів, вимірювання, рота, порожнини
Формула / Реферат:
Спосіб вимірювання розмірів в порожнині рота за допомогою стоматологічного вимірювача шляхом встановлення ніжок стоматологічного вимірювача на вимірюваний предмет, відліку кута φ відхилення стрілки та обчислення вимірюваної величини, який відрізняється тим, що шукана відстань х обчислюється за формулою х=2asinφ/2, де а - довжина ніжок вимірювача.
Спосіб вимірювання кутових відстаней
Номер патенту: 60384
Опубліковано: 25.06.2011
Автор: Бандирська Ореста Володимирівна
МПК: G01B 11/26
Мітки: відстаней, кутових, спосіб, вимірювання
Формула / Реферат:
Спосіб вимірювання кутових відстаней, який передбачає фіксацію і наступне порівнювання вимірюваної відстані з послідовністю еталонних відстаней, утворених на послідовності кутових проміжків між променями, що виходять з однієї спільної точки і утворюють один відносно одного кути, кратні найменшому з них, який відрізняється тим, що як послідовність використовують неоднакові кутові проміжки, величини яких повторюються.
Попередній патент: Похідні амідів 6,7-дигідро-5н-імідазо[1,2-a]імідазол-3-карбонової кислоти
Випадковий патент: Пристрій для разгазування тупикової гірничої виробки в аварійних умовах