Спосіб вимірювання діаметра циліндричних виробів оптико-електронною системою
Номер патенту: 79146
Опубліковано: 25.05.2007
Автори: Воробель Роман Антонович, Гапонюк Ярослав Васильович
Формула / Реферат
Спосіб вимірювання діаметра циліндричних виробів оптико-електронною системою, який полягає в перетворенні фотоелектронного зображення двовимірної кривої на фоточутливій площині в дискретний набір його елементів, з яких формують групи по три елементи, який відрізняється тим, що до перетворення фотоелектронного зображення двовимірної кривої в дискретний набір елементів послідовно в часі формують світлову площину, освітлюють цією світловою площиною циліндричну поверхню, утворюють тривимірну світлову криву на поверхні циліндричного виробу, перетворюють тривимірну світлову криву в фотоелектронне зображення двовимірної кривої шляхом проекції тривимірної світлової кривої на фоточутливу площину, а формування груп з трьох елементів зображення проводять циклічно і послідовно в часі таким чином, що в кожному циклі j вибирають максимально можливу кількість sj груп по три елементи зображення а1sj, а2sj, a3sj з координатами відповідно (x1sj, y1sj), (x2sj, y2sj), (x3sj, y3sj) із співвідношенням координат таким, що виконується умова x2sj-x1sj=t1j=const, x3sj-x1sj=t2j=const, обраховують миттєві діаметри циліндричного виробу sj разів за формулою Dsj=Ajk(y2sj-y1sj)+Bjk(y3sj-y1sj)+Gjk, після чого переходять до наступного циклу j+1, задають наступну пару констант t1,j+1 та t2,j+1 і вибирають наступні sj+1 групи точок, для яких обчислюють величини миттєвих діаметрів Ds,j+1, обчислення продовжують доти, поки не вичерпаються всі можливі комбінації дискретних констант t1j та t2j, знаходять усереднене значення D всіх миттєвих діаметрів Dsj, а також координати центра відповідного йому кола, для кожного елемента зображення двовимірної кривої знаходять різницю між його віддаллю до центра кола та усередненим діаметром D, ділянки циліндричної поверхні, для яких дана різниця перевищує наперед задані критерії, визнають дефектними та класифікують відповідно до заданих критеріїв, при цьому коефіцієнти Аjk, Вjk, Сjk визначають за допомогою відомих формул теорії наближень до початку виконання процесу визначення діаметра циліндричного виробу та дефектності його поверхні як параметри лінійного двомірного виразу.
Текст
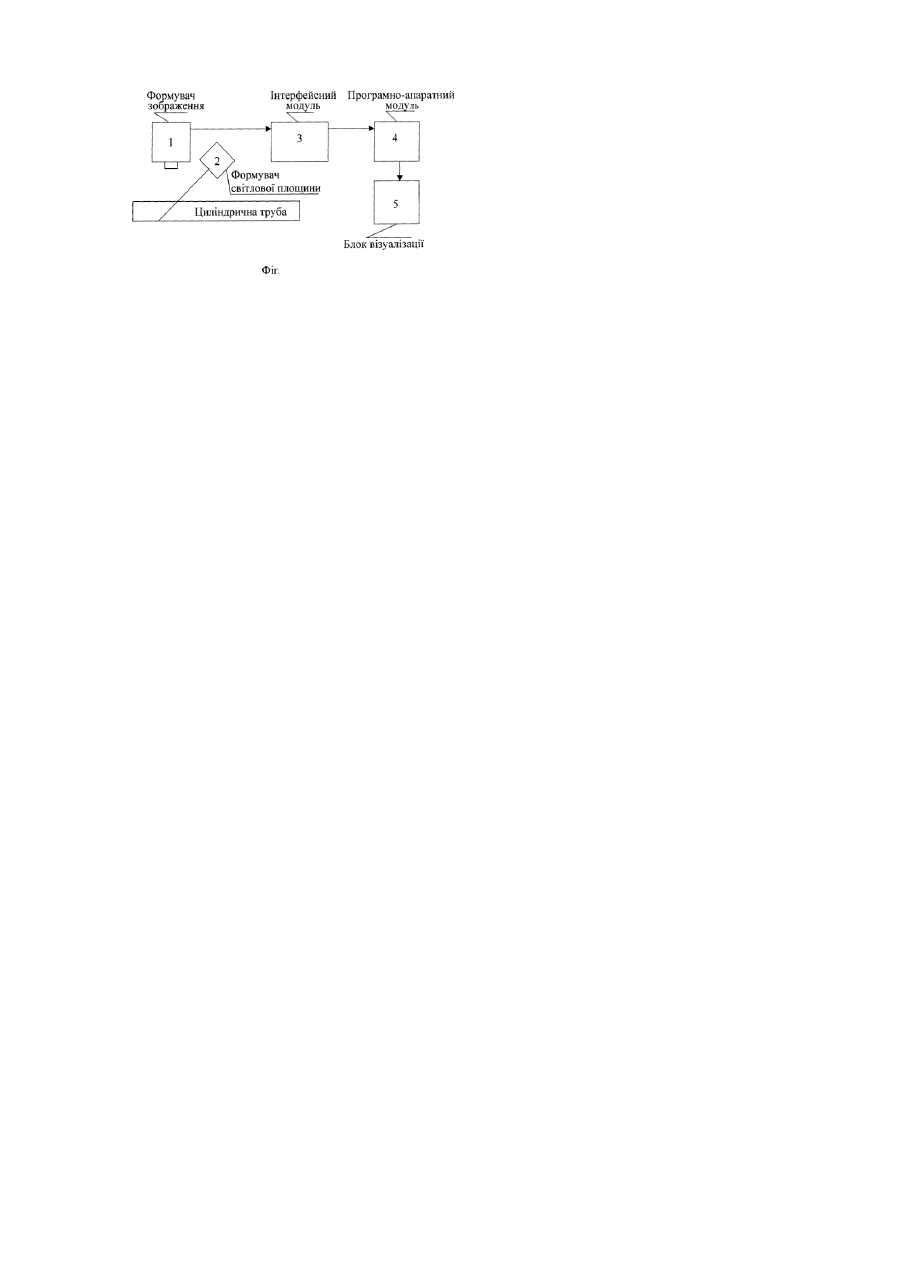
Винахід відноситься до вимірювальної техніки і може бути використаний для вимірювання діаметру циліндричних виробів та визначення наявності дефектів на їх поверхні. Відомий пристрій для вимірювання діаметру виробів складається з трьох джерел колімованих променів світла, трьох фотодетекторів, вимірювального пристрою та процесорного пристрою [1]. Недоліками застосованого в даному пристрої способу є невисокий робочий діапазон, складність у виготовленні та налагоджуванні пристроїв, які побудовані на його основі, невисока точність вимірювань внаслідок необхідності обробки аналогових сигналів. Наступний відомий пристрій для вимірювання зовнішніх розмірів виробу складається з лазера, коліматора, детектора лазерного випромінювання, блоків вимірювання, обчислення та регулювання [2]. Пристрій побудований на основі тіньового способу, який полягає в тому, що промінь лазера сканує виріб, оптичний пристрій визначає розмір виробу пропорційно до часу, на протязі якого промінь лазера перекривається вказаним виробом. Недоліками пристрою є складність у виготовленні та налагоджуванні, а також обмеженні функціональні можливості за рахунок вимірювання величини тільки перерізу виробу. Пристрій, який також побудований на основі тіньового методу, призначений для вимірювання діаметру дерев'яних колод за допомогою випромінювача та приймача світлової площини, які розташовані на протилежних сторонах дерев'яної колоди, за рахунок вимірювання величини затінення, яке створюється колодою та фіксується приймачем світлової площини [3]. Недоліками даного пристрою є ті ж недоліки, що і в попередніх пристроях. Додатковим недоліком пристрою є ускладнення конструкції транспортера колод. Близьким по своїй суті є пристрій, який може визначати параметри просторової кривої за допомогою застосування телекамери та лінійного структуваного освітлення. Для обчислення параметрів кривої в пристрої запропоновано використовувати наближення поліномом, за допомогою методу найменших квадратів, точок кривої, координати яких фіксуються телекамерою та обчислюються на основі тріангуляційного методу [4]. Застосування запропонованого в даному пристрої способу обчислення параметрів кривої стосовно діаметру циліндричних виробів має ряд недоліків. Наближення поліномом у випадку знаходження діаметра кола зводиться до розв’язку системи трьох рівнянь. Апаратна реалізація обчислювального блоку для розв’язку системи трьох рівнянь є складною при конструюванні та громіздкою і енергоємною при експлуатації. При програмній реалізації на основі мікропроцесора послідовної дії така система має невисоку швидкодію внаслідок необхідності виконання великої кількості послідовних операцій. При необхідності застосування переносних портативних пристроїв та обробки великої кількості точок вказані недоліки мають вирішальне значення при конструюванні пристроїв обчислення діаметрів циліндричних виробів. Найближчим по своїй суті до заявленого є спосіб та пристрій (найближчий аналог), для визначення діаметру отвору в контактних площадках мікроелектронних схем, який складається з оптико-електронного формувача зображення, який фіксує зображення двовимірної кривої, процесор, який обробляє вказане зображення та перетворює його в набір точок, вибирає з вказаного набору групу з трьох точок та підставляє їх координати в рівняння кола, що і дозволяє визначити радіус кола після розв'язку даного рівняння [5]. Недоліком даного пристрою є його обмежені функціональні можливості, які не дозволяють йому визначати діаметр тривимірних об'єктів, таких як циліндрична труба, та необхідність виконувати складні обчислення, що призводить до низької швидкодії способу та пристрою. Завдання винаходу є розробка способу обчислення діаметру циліндричних виробів з метою підвищення швидкодії, точності та розширення функціональних можливостей оптико-електронних пристроїв для вимірювання діаметрів циліндричних виробів за рахунок визначення наявності дефектів на поверхні циліндричних виробів в процесі їх виробництва. Для досягнення цієї мети запропоновано спосіб визначення діаметру циліндричного виробу та дефектності його поверхні, який полягає в тому, що послідовно в часі формують світлову площин у, освітлюють цією світловою площиною циліндричну поверхню, утворюють тривимірну світлову криву на поверхні циліндричного виробу, перетворюють тривимірну світлову криву в фотоелектронне зображення двовимірної кривої на фоточутливій площині, перетворюють це зображення в дискретний набір його елементів, з яких формують групи по три елементи, формування груп з трьох елементів проводять циклічно і послідовно в часі таким чином, що в кожному циклі j з усіх елементів, які належать фотоелектронному зображенню двовимірної кривої, вибирають максимально можливу кількість s j груп по три елементи a1sj, a2sj, a3sj з координатами відповідно (х1sj, у2sj), (х2sj, у2sj), (х3sj, у3sj) із співвідношенням координат таким, що виконується умова x2sj-x1sj=t1j=const, x3sj- x1sj=t 2j=const, обраховують миттєві діаметри циліндричного виробу s j разів за формулою Dsj=Ajk(y2sj-y1sj)+Bj k(y3sj-y1sj)+Cjk, після чого переходять до наступного циклу j+1, задають наступну пару констант t1,j+1 та t2,j+1 і вибирають наступні s j+1 груп елементів, для яких обчислюють величини миттєви х діаметрів Ds,j+1, зміну циклів та обчислення миттєвих діаметрів продовжують до тих пір, поки не вичерпаються всі можливі комбінації дискретних констант t1j та t2j , знаходять усереднене значення D всіх миттєви х діаметрів Dsj, а також усереднені координати центра відповідного йому кола, для кожного елемента зображення двовимірної кривої знаходять різницю між її віддалю до центра кола та усередненим діаметром D, ділянки циліндричної поверхні, для яких дана різниця перевищує наперед задані критерії, визнають дефектними та класифікують відповідно до заданих критеріїв, причому коефіцієнти Aj k, Bj k, Cj k визначають до початку виконання процесу визначення діаметру циліндричного виробу та де фектності його поверхні. Додані до відомого способу визначення радіусу двовимірної кривої дії використовуються в інформаційновимірювальних системах, але окремо вони не володіють властивостями, які б забезпечили вирішення поставленої задачі. Такими властивостями володіє лише їх запропонована сукупність, тобто, вступаючи в взаємодію, сукупність ознак надає заявленій системі нову якість. Для кращого розуміння суті винаходу додається креслення, де на фігурі зображено пристрій, за допомогою якого реалізовано запропонований спосіб визначення діаметру циліндричного виробу та дефектності його поверхні. Відповідно до креслення (Фіг.), пристрій для визначення діаметру циліндричного виробу та дефектності його поверхні складається з формувача зображення 1, формувача світлової площини 2, інтерфейсного модуля 3, програмно-апаратного модуля 4, а також блока візуалізації отриманих результатів 5. Формувач світлової площини 2 утворює на циліндричній поверхні тривимірну світлову криву, яка за допомогою формувача зображення 1 перетворюється в зображення двовимірної кривої на матриці формувача зображення 1, котре через інтерфейсний модуль 3 передається в програмно-апаратний модуль 4, результат роботи котрого фіксується на дисплеї блока 5 візуалізації отриманих результатів. Алгоритм обробки зображення двовимірної кривої в програмно-апаратному модулі 4 можна пояснити шляхом розгляду способу, який заявляється. Традиційним методом знаходження радіусу зображення двовимірної кривої (див. опис найближчого аналогу) є вибір групи з трьох елементів зображення а 1=(х1 ,у1), а2=(х2,у2), а3=(х3,у3) та побудова системи трьох рівнянь на основі координат цих елементів: ìr 2 = (x1 - x0 )2 + s2 ( y1 - y0 )2 ï ï2 2 2 2 (1) ír = (x 2 - x 0 ) + s (y 2 - y0 ) ï2 2 2 2 ïr = (x 3 - x 0 ) + s (y 3 - y0 ) î де s=tga; а-заданий мінімальний кут між світловою площиною та віссю циліндричної труби, х0,у0 координати центра кола або еліпса. Ми пропонуємо перейти до різниці координатах цих точок: x 2 = x1 + v 1; (2) x3 = x1 + v 2 ; w 1s = sy1 - sy2 = s( y1 - y 2 ); (3) w 2 s = sy1 - sy3 = s( y1 - y3 ); або w 1 = w 1s / s; (3.1) w 2 = w 2s / s; де v1, v2 - віддаль між першою та другою, а також першою та третьою точками по осі абсцис, w1,w2 віддаль між першою та другою, а також першою та третьою точками по осі ординат, w1s,w2s - віддаль між першою та другою, а також першою та третьою точками по осі ординат з урахуванням кута між світловою площиною та віссю циліндричної труби. Формула (3) означає, що різницю ординат вибраних точок слід домножувати на тангенс кута між світловою площиною та віссю циліндричного виробу. Розв'язок системи рівнянь (1) із врахуванням залежностей (2), (3) і (3.1) з метою визначення радіусу кривої дає залежність: 2 r= éæ ù ö c w ö æv w êç c 2 - 1 2 ÷ / ç 1 2 - v 2 ÷ + v 2 ú + ç ÷ w1 ÷ ç w1 êè ú ø è ø ë û 2 éì æ ù ü ö w ö æ w ï ï + êív 1ç c 2 - c 1 2 ÷ /ç v 1 2 - v 2 ÷ + c1ý / w1 - w2 ú ; ç ÷ ç w ÷ w1 ø è êï è ï ú 1 ø þ ëî û (4) де c1=(v12+w 12)/2; c2=(v22+w2 2)/2; Якщо досліджувана крива має 100 точок, то необхідно провести 161700 обчислень миттєвого радіусу. Термін "миттєвий радіус" ми використовуємо для умовного означення радіуса того кола, яке можна побудува ти на основі вибраних в даний момент (мить) елементів, але який може не співпадати з усередненим радіусом циліндра. Спрощення формули для обчислення миттєвого радіусу призводить до суттєвого підвищення швидкодії пристрою. Тому нами запропоновано замість формули (4) використовувати її рівномірне лінійне чебишовське наближення у ви гляді залежності: D=Аw1+Bw2+Ev1+Fv2+G (5) де D=2r - діаметр циліндра, А, В, Е, F, G - параметри виразу наближення, які розраховуються за допомогою відомих формул теорії наближення функцій на основі виразу, який потрібно наблизити з наперед заданою точність, в даному випадку виразу (4). Нами крім того запропоновано перебір елементів зображення двовимірної кривої проводити таким чином, щоб різниці координат v1 , ν2 на протязі одного циклу обчислень залишалися постійними v1=const, v2=const. Тоді обчислення діаметру на протязі одного циклу можна проводити за формулою: D=Aw1+Bw2+C (6) де С=Ev1+Fv2+G=const; Тому алгоритм обчислення миттєвого діаметра полягає в тому, що весь процес обчислення розбивають на цикли, і в кожному циклі вибирають тільки ті елементи зображення кривої, для яких різниці координат по осі х мають постійне, наперед задане значення в межах даного циклу: ν1=tj1=со nst; v2=tj2=cоnst; де j - номер циклу, s - кількість груп по три елементи в межах одного циклу. Кількість циклів j дорівнює кількості можливих комбінацій з двох констант tj1, tj2. На протязі одного циклу j коефіцієнти А, В, С можуть приймати k значень. Тому до початку процесу визначення діаметру нам потрібно визначити всі коефіцієнти Ajk, Bj k, Сjk виходячи з положень теорії побудови найкращих чебишовських наближень, суть якої полягає в тому, що для заданої функції дво х змінних F(x,у) шукають більш просту, в даному випадку лінійну функцію двох змінних h(x,y)=Aj kx+Bj ky+Cjk. Для цього в деякій прямокутній області значень змінних х, у відповідно до відомих алгоритмів шукають такі чотири точки qm=qm(xm,ym), m=1,2,3,4, для яких похибка δ наближення функції F(x,у) функцією h(x,у)=Ах+By+С однакова та максимальна. Для цих точок складають систему рівнянь: F(xm,ym)-(Axm+Bym+C)=δ, m=1,2,3,4 з якої визначають значення А, В, С, δ. Тобто, суть запропонованого способу полягає в тому, що за рахунок розбиття області зміни значень змінних, які входять в формулу (4) на піддіапазони та встановлення для кожного піддіапазону лінійної двовимірної функції наближення вдалось в декілька разів збільшити швидкодію способу та відповідного йому пристрою для визначення діаметру циліндричного виробу та дефектності його поверхні. Похибку наближення можна зменшувати за рахунок зменшення величини піддіапазону. Всі миттєві діаметри усереднюють і таким чином знаходять дійсний діаметр циліндричного виробу. Відхилення положення точки на поверхні циліндра на віддаль більшу, ніж величина дійсного діаметру розглядають як дефект і класифікують відповідно до заданих критеріїв. Формувач зображення 1 може бути виконаний у вигляді телекамери, веб-камери, цифрової фотокамери. Формувач світлової площини 2 може складатися з видовженої люмінесцентної лампи або матової лампи розжарення та вузької щілини, а також з обертового шестигранного дзеркала та спрямованого на нього лазера. Застосування запропонованого способу розглянуто для випадку, коли оптична вісь формувача зображення розташована перпендикулярно до осі циліндричної труби, світлова площина утворює з віссю труби деякий кут α, а горизонтальний переріз світлової площини перпендикулярний до осі циліндричного виробу та оптичної осі формувача зображення. Проте запропонований спосіб можна застосовувати і для інши х випадків взаємного розташування формувача зображення, світлової площини та циліндричної поверхні. Наприклад, оптична вісь формувача зображення може бути розташована під прямим кутом до світлової площини, так як вказано в роботі (4). Форма зображення світлової кривої не має принципового значення для застосування запропонованого способу. Інтерфейсний модуль 3 може бути виконаний у вигляді однокристального мікроконтролера, фреймграбера або інших аналогічних пристроїв, які здатні зчитати зображення, сформоване на матриці формувача зображення та передати його в програмно-апаратний модуль 4, який може бути виконаний як однокристальний мікроконтролер, мобільний телефон, кишеньковий, мобільний або настільний персональний комп'ютер та ін.. Функції блоків 1, 3, 4 можуть виконуватись одним комбінованим пристроєм з достатньою обчислювальною потужністю та вбудованим пристроєм формування зображення, наприклад, мобільним телефоном з вбудованою фотокамерою, або кишеньковим персональним комп'ютером з вбудованою фотокамерою. Блок візуалізації може бути як окремим індикатором, так і вбудованим дисплеєм в один з вище перерахованих блоків. До опису додається одне креслення. На кресленні подано блок-схему пристрою для вимірювання діаметру циліндричних виробів та визначення наявності дефектів на їх поверхні. Відповідно до креслення пристрій складається з формувача зображення 1, формувача світлової площини 2, інтерфейсного модуля 3, програмно-апаратного модуля 4, а також блока 5 візуалізації отриманих результатів. Суттєві відмінності запропонованого способу полягають в тому, що 1) діаметр обраховується як функція різниць між координатами точок, внаслідок чого кількість змінних зменшується з шести до чотирьох, 2) формула для обрахунку величини діаметра є принципово точною формулою, а не середньоквадратичним або іншим наближенням, 3) точна формула для обрахунку величини діаметру замінюється на її чотиривимірне наближення, параметри якого розраховуються до початку обчислень, внаслідок чого зростає швидкодія обчислень, 4) чотиривимірне наближення подається у вигляді послідовності двовимірних наближень, 5) проводиться максимально можлива кількість обчислень діаметру циліндричного виробу і знаходиться його середньостатистичне значення, або значення діаметра, яке має найбільшу статистичн у повторюваність, або інша статистична величина, яка найбільш повно відповідає стану поверхні виробу, який контролюється, за рахунок чого підвищується точність обчислення діаметру, 6) одночасно визначається середньостатистичне значення величин x0, у0, внаслідок чого для кожної точки х1, у1 стає можливим визначити миттєвий радіус із першого рівняння системи рівнянь (1), 7) відхилення миттєвого радіусу для однієї або сукупності точок, на величину, більшу заданої, залежно від конкретної задачі, означає наявність дефектної ділянки. Список використаної літератури: 1. Non-contact dimensional gage for turned parts // International Class: G01J03/45 / Патент США №4880991 від 14.11.1989р. 2. Non-contact measuring device // International Class: G01B11/08 / Патент США №5175595 від 29.12.1992p. 3. Apparatus for measuring elongate objects // International Class: G01B11/10 / Патент Великобританії №GВ2257512 від 13.01.1993p. 4. System for measuring shapes and dimensions of gaps and flushnesses on three dimensional surfaces of objects // International Class: G06K009/00 / Патент США №5129010 від 07.07.1992 p. 5. Method and system for measuring characteristics of curved features // International Class: G06K009/36 / Патент США №6724947 від 20.04.2004p.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measuring the diameter of a cylindrical article by optoelectronic device
Автори англійськоюVorobel Roman Antonovych, Haponiuk Yaroslav Vasyliovych
Назва патенту російськоюСпособ измерения диаметра цилиндрического изделия с помощью оптико-электронного устройства
Автори російськоюВоробель Роман Антонович, Гапонюк Ярослав Васильевич
МПК / Мітки
МПК: G01B 11/08, G01B 11/30
Мітки: спосіб, оптико-електронною, виробів, діаметра, циліндричних, вимірювання, системою
Код посилання
<a href="https://ua.patents.su/4-79146-sposib-vimiryuvannya-diametra-cilindrichnikh-virobiv-optiko-elektronnoyu-sistemoyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання діаметра циліндричних виробів оптико-електронною системою</a>
Пристрій для вимірювання середнього діаметра круглих виробів
Номер патенту: 24054
Опубліковано: 31.08.1998
Автори: Ободан Володимир Якович, Сологуб Борис Васильович, Бердянський Юхим Натан-Анатолійович
МПК: G01B 21/10
Мітки: пристрій, вимірювання, виробів, круглих, діаметра, середнього
Формула / Реферат:
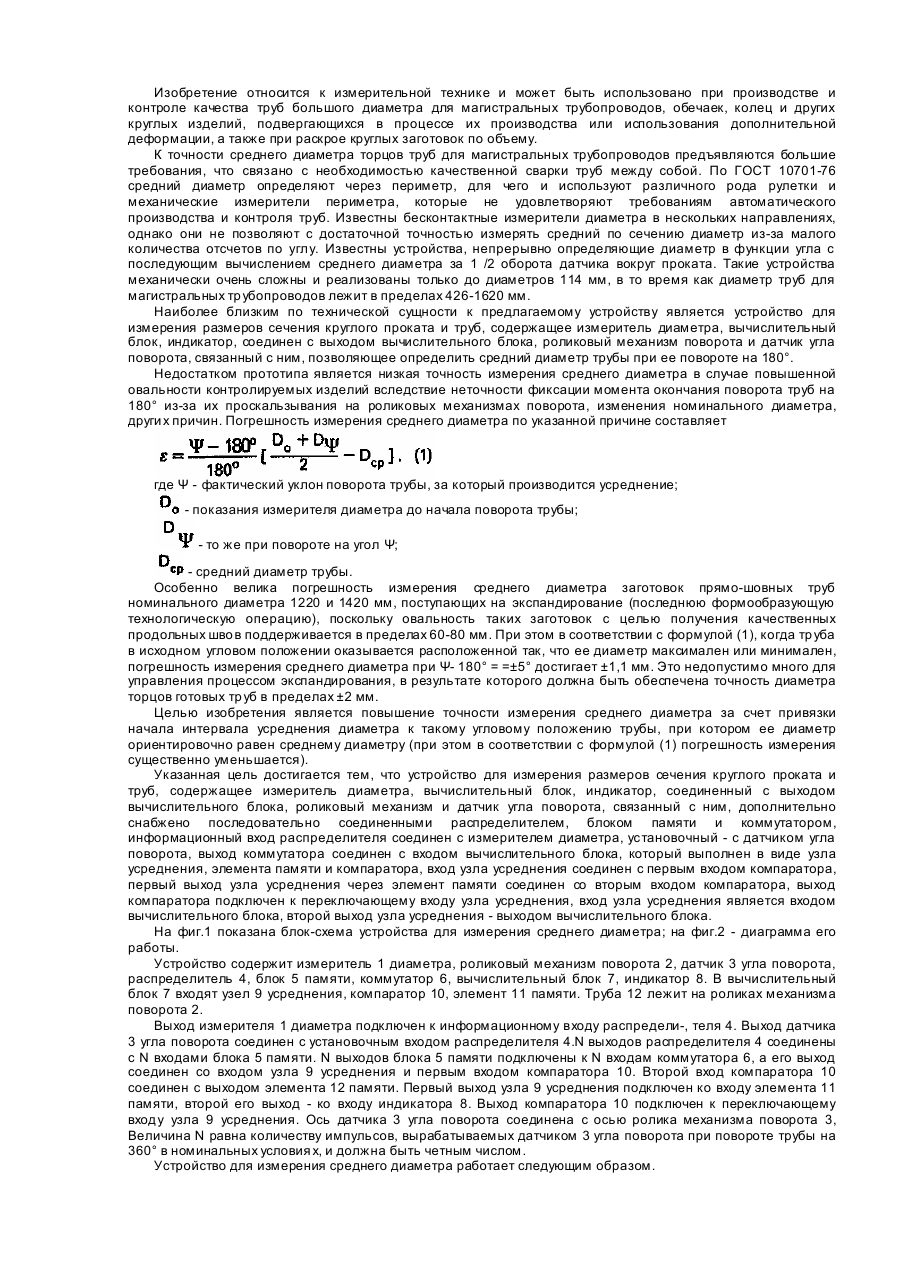
Устройство для измерения среднего диаметра круглых изделий, содержащее измеритель диаметра, вычислительный блок, индикатор, соединенный с выходом вычислительного блока, роликовый механизм поворота и датчик угла поворота, связанный с ним, отличающееся тем, что оно снабжено последовательно соединенными распределителем, блоком памяти и коммутатором, информационный вход распределителя соединен с измерителем диаметра, установочный - с датчиком...
Спосіб безконтактного виміру температури циліндричних провідних немагнітних виробів
Номер патенту: 56800
Опубліковано: 15.05.2003
Автори: Горкунов Борис Митрофанович, Телепнев Андрій Вікторович, Себко Вадим Пантелійович
МПК: G01R 33/12
Мітки: спосіб, виміру, температури, провідних, безконтактного, виробів, циліндричних, немагнітних
Формула / Реферат:
Спосіб безконтактного виміру температури циліндричних провідних немагнітних виробів, що включає збудження у виробі вихрових струмів змінним магнітним полем і полягає в тому, що виріб поміщають у змінне магнітне поле, спрямоване поперечно до виробу, яке збуджує поздовжні вихрові струми, вимірюють внесену електрорушійну силу (е.р.с.) Евн і визначають амплітуду нормованої е.р.с К перетворювача, по якій за допомогою встановленої універсальної...
Спосіб вимірювання швидкості і ефективного діаметра частинки
Номер патенту: 50226
Опубліковано: 15.10.2002
Автори: Морозов Микола Вікторович, Мовчан Сергій Іванович
МПК: G01N 15/00
Мітки: діаметра, спосіб, ефективного, вимірювання, швидкості, частинки
Формула / Реферат:
Спосіб вимірювання швидкості і ефективного діаметра частинки, який включає освітлення досліджуваного середовища і реєстрацію фотоприймачем інтенсивності розсіяного частинкою світлового випромінювання, який відрізняється тим, що досліджуване середовище освітлюють двома когерентними пучками, які спрямовані під кутом один до одного у зондуючу зону, подають доплерівський сигнал з фотоприймача на цифровий запам’ятовуючий осцилограф, визначають...
Спосіб вимірювання та контролю внутрішнього діаметра трубок для газорозрядних приладів
Номер патенту: 30363
Опубліковано: 15.11.2000
Автори: Лисенко Григорій Матвійович, Лубенець Сергій Васильович, Лисенко Віктор Григорович, Галай Микола Васильович
МПК: H01J 9/42
Мітки: спосіб, вимірювання, газорозрядних, приладів, діаметра, контролю, трубок, внутрішнього
Формула / Реферат:
Спосіб вимірювання та контролю внутрішнього діаметра трубок для газорозрядних приладів, що включає подачу світла від джерела монохроматичного випромінювання на трубку, що вимірюється, через волоконний світловод та лінзи на вхідний отвір, який відрізняється тим, що вимірюють розсіяне випромінювання на вихідному отворі безпосередньо фоторезисторним датчиком, підсилені сигнали фотодатчика, що подають на осцилограф, а потім знімають з екрана...
Поштова скринька з електронною системою контролю виймання поштової кореспонденції
Номер патенту: 9111
Опубліковано: 15.09.2005
Автори: Здольник Геннадій Петрович, Верба Юрій Валентинович, Коряков Ігор Віталійович
МПК: A47G 29/00
Мітки: поштової, кореспонденції, електронною, поштова, системою, виймання, контролю, скринька
Формула / Реферат:
1. Поштова скринька, що містить пустотілий корпус з завантажувальним клапаном та основу з напрямними для встановлення розвантажувальної рамки і пристосування для реєстрації виймання кореспонденції, яка відрізняється тим, що пристосування для реєстрації виймання кореспонденції виконано у вигляді двох окремих функціональних блоків, перший із яких прикріплений до поштової скриньки (п/с) і служить для ідентифікації поштової скриньки, часу...
Попередній патент: Торакометр
Наступний патент: Спосіб одержання сполуки бензімідазолу
Випадковий патент: Томограф