Спосіб гіроскопічного вимірювання вібраційним гіроскопом
Формула / Реферат
1. Спосіб гіроскопічного вимірювання, здійснюваного гіроскопічною системою, яка включає вібраційний гіроскоп;
при цьому згаданий гіроскоп вібрує в початковому першому геометричному положенні і надає вимірювальний сигнал;
при цьому надсилають періодичний командний сигнал до вібраційного гіроскопа протягом певного періоду часу, при цьому періодичний командний сигнал адаптований до:
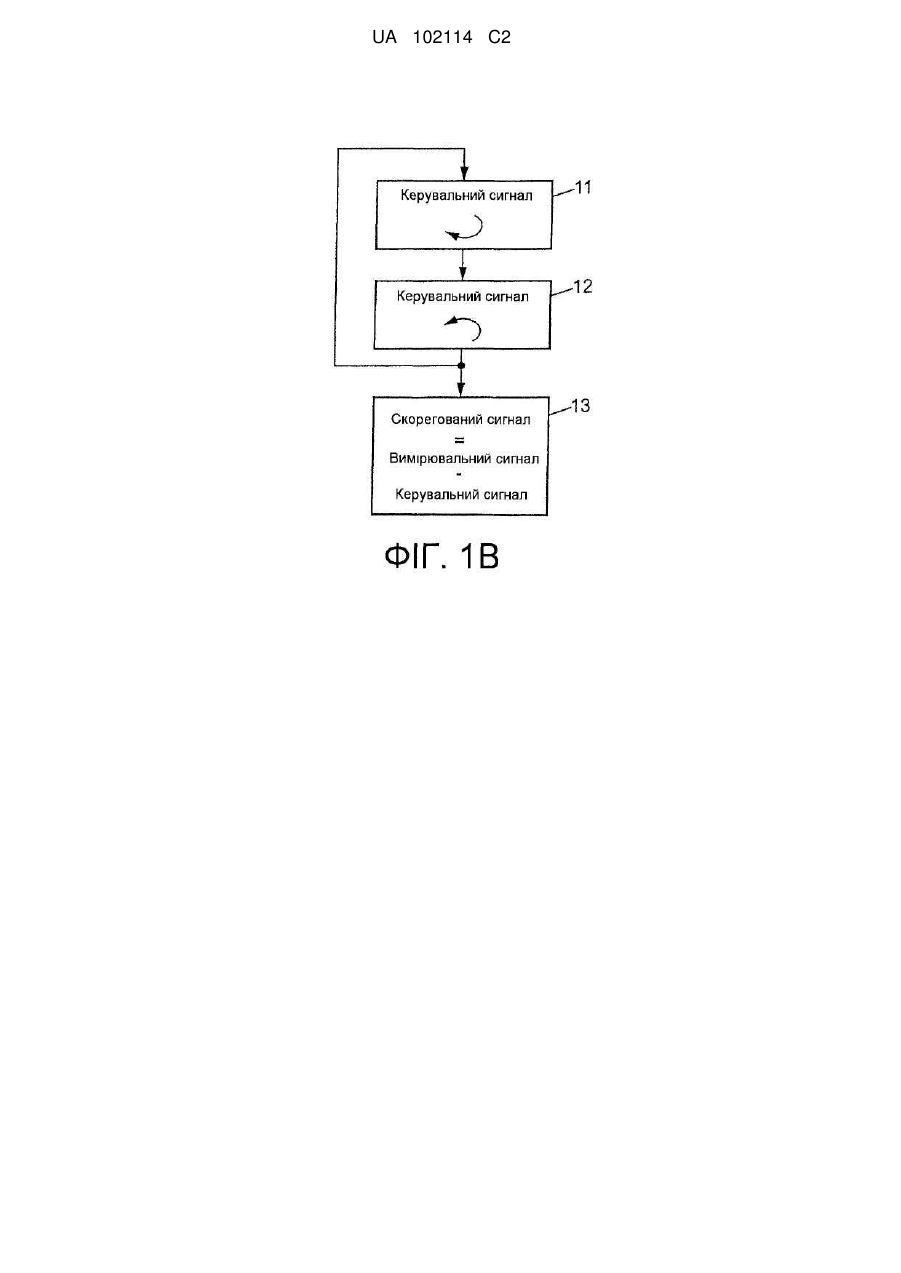
зміни на першому кроці (11) під час однієї частини часового періоду, у відповідності з першим профілем швидкості, першого геометричного положення при вібрації на друге геометричне положення при вібрації згаданого гіроскопа; і
зміни на другому кроці (12), в протилежному напрямку до першого кроку, під час іншої частини часового періоду, у відповідності з другим профілем швидкості, другого геометричного положення при вібрації на перше геометричне положення при вібрації згаданого гіроскопа;
при цьому згаданий командний сигнал має нульове середнє значення протягом згаданого часового періоду, а перший і другий профіль швидкості вказують швидкість зміни геометричного положення при вібрації як функцію від часу; і
при цьому виміри (13), здійснені гіроскопічною системою, базуються на скорегованому сигналі, який відповідає зміні значень геометричного положення при вібрації і одержаний відніманням командного сигналу від вимірювального сигналу, наданого гіроскопом.
2. Спосіб за п. 1, який відрізняється тим, що другий профіль швидкості обернений до першого профілю швидкості як функція від часу.
3. Спосіб за п. 1, який відрізняється тим, що дві частини часового періоду ідентичні.
4. Спосіб за будь-яким із пп. 1-3, який відрізняється тим, що вимірювальний сигнал від гіроскопа і командний сигнал виражають як результати вимірів, здійснених гіроскопічною системою або у вигляді величин кута, або у вигляді величин кутової швидкості.
5. Спосіб гіроскопічного вимірювання за одним із пп. 1-3, який відрізняється тим, що результати вимірів, здійснені гіроскопічною системою, відповідають величинам кутової швидкості, кожна з яких одержується з ділення різниці між двома значеннями геометричного положення при вібрації скорегованого сигналу, відокремленими цілим числом часових періодів, на час, який відповідає цілому числу часових періодів.
6. Спосіб гіроскопічного вимірювання за будь-яким із пп. 1-3, який відрізняється тим, що виміри, здійснені гіроскопічною системою, одержують фільтруванням нижніх частот скорегованого сигналу.
7. Спосіб гіроскопічного вимірювання за п. 6, який відрізняється тим, що до надання результатів вимірів, здійснюваних гіроскопічною системою, надсилають періодичний сигнал під час часового інтервалу, достатньо довгого для надання можливості розглядання командного сигналу як високочастотного сигналу по відношенню до вимірювального сигналу від вібраційного гіроскопа.
8. Спосіб гіроскопічного вимірювання за будь-яким із попередніх пунктів, який відрізняється тим, що часовий період, перший та другий профілі швидкості командного сигналу визначають так, що перше і друге геометричне положення при вібрації вібраційного гіроскопа відокремлені 2p/kN радіанами,
де N є частотною модою вібрації вібраційного гіроскопа; і
де k є додатнім цілим числом, визначеним в залежності від порядку коригованих похибок.
9. Гіроскопічна система, яка має:
вібраційний гіроскоп (21), який здатен вібрувати у початковому першому геометричному положенні і надавати вимірювальний сигнал;
командний блок (22), виконаний з можливістю надання періодичного командного сигналу протягом часового періоду, пристосованого до:
зміни на першому кроці під час однієї частини часового періоду, у відповідності з першим профілем швидкості, першого геометричного положення при вібрації на друге геометричне положення при вібрації згаданого гіроскопа; і
зміни на другому кроці, в протилежному напрямку до першого кроку, під час іншої частини часового періоду, у відповідності з другим профілем швидкості, другого геометричного положення при вібрації на перше геометричне положення при вібрації згаданого гіроскопа;
при цьому згаданий командний сигнал має нульове середнє значення протягом згаданого часового періоду, а перший і другий профіль швидкості вказує швидкість зміни геометричного положення при вібрації як функцію від часу; і
блок (26) обробки, виконаний з можливістю надання скорегованого сигналу, який відповідає зміні значень геометричного положення при вібрації і одержаний відніманням командного сигналу від вимірювального сигналу, який надається вібраційним гіроскопом.
10. Гіроскопічна система за п. 9, яка відрізняється тим, що другий профіль швидкості обернений до першого профілю швидкості як функція від часу.
11. Гіроскопічна система за п. 9 або п. 10, яка відрізняється тим, що додатково має розрахунковий блок (53) на виході блока (26) обробки, виконаного з можливістю надання результатів гіроскопічних вимірів, які відповідають величинам кутової швидкості, кожна з яких одержана з ділення різниці між двома значеннями геометричного положення при вібрації скорегованого сигналу, відокремлених цілим числом часових періодів, на час, який відповідає цілому числу часових періодів.
12. Гіроскопічна система за п. 9, яка відрізняється тим, що додатково має фільтр нижніх частот на виході блока (26) обробки, виконаний з можливістю фільтрування високочастотних компонентів скорегованого сигналу.
13. Гіроскопічна система за будь-яким із пп. 9-12, яка відрізняється тим, що часовий період, перший і другий профілі швидкості командного сигналу визначені так, що перше і друге геометричне положення при вібрації вібраційного гіроскопа відокремлені 2p/kN радіанами,
де N є частотною модою вібрації вібраційного гіроскопа, і
де k є додатнім цілим числом, визначеним в залежності від порядку коригованих похибок.
Текст
Реферат: Гіроскопічна система надає виміри на основі вібраційного гіроскопа, який вібрує в першому положенні і надає вимірювальний сигнал. Періодичний командний сигнал надсилається до неї протягом часового періоду: для зміни на першому кроці (11) під час однієї частини часового періоду, у відповідності з першим профілем швидкості, першого положення на друге положення; і для зміни на другому кроці (12), в протилежному напрямку до першого кроку, під час іншої частини часового періоду, у відповідності з другим профілем швидкості, другого положення на перше положення. Профілі швидкостей вказують швидкість зміни положення. Виміри (13), надані системою, потім базуються на скорегованому сигналі, одержаному відніманням командного сигналу від вимірювального сигналу, наданого гіроскопом. UA 102114 C2 (12) UA 102114 C2 UA 102114 C2 5 10 15 20 25 30 35 40 45 50 55 60 Представлений винахід відноситься до вібраційних гіроскопів, принцип роботи яких базується на ефекті Коріоліса, і він відноситься, більш точно, до точності вимірювань, забезпечуваних цим типом гіроскопу. Такі вібраційні гіроскопи традиційно використовуються в інерційних навігаційних системах, як, наприклад, у випадку гіроскопічного компасу, який пристосований до надання значення кута по відношенню до еталонного напряму, який відповідає географічній півночі (Напрям). Асиметричні коріолісові вібраційні гіроскопи (CVG), наприклад напівсферичний резонансний гіроскоп (HRG), більш загально названий типом I, як ті, що описані в документі "Type I and Type II micromachined vibratory gyroscopes by Andrei M. Shkel, pages 586-593, IEEE/ION (Institute of Electrical and Electronics Engineers/Institute of Navigation, PLANS 2006, San Diego, CA, USA)”, працюють у режимі розімкнутого контуру і вимірюють абсолютний кут повороту на основі вимірювання кута, який представляє геометричне положення при вібрації гіроскопа відносно вимірювальних електродів. Такий гіроскоп може також використовуватися в режимі замкнутого контуру шляхом контролю геометричного положення при вібрації завдяки керуванню прецесією, як це описано, зокрема, в документі FR 2 755 227. У цьому випадку, геометричне положення гіроскопу при вібрації утримується фіксованим, а вимірюваний параметр отримується з керувальних вхідних даних, які необхідно надіслати до гіроскопу для утримування його геометричного положення при вібрації фіксованим. Цей тип роботи також називається "гірометричним циклом". Величини, які одержується з фізичного вимірювання, далі не відповідають куту, проте відповідають швидкості повороту. Незалежно від того, чи гіроскоп використовується в режимі розімкнутого контуру, чи в режимі замкнутого контуру, виміряні параметри, які надаються цими вібраційними гіроскопами, можуть містити похибки, які по суті є функцією положення при вібрації відносно вимірювальних електродів. Тому, ці похибки змінюються як функція геометричного положення при вібрації і погіршують рівень точності величин, вимірюваних у цей спосіб. Тому, вигідно шукати можливості зменшити ці похибки для покращення робочих характеристик цього типу гіроскопу. Представлений винахід покращує цю ситуацію. Перший аспект представленого винаходу пропонує спосіб гіроскопічних вимірювань, виконуваних гіроскопічною системою, яка має вібраційний гіроскоп; при цьому згаданий гіроскоп вібрує у початковому першому геометричному положенні і надає вимірювальний сигнал; при цьому до вібраційного гіроскопу протягом певного періоду часу надсилається періодичний командний сигнал, адаптований до: - зміни у перший спосіб під час однієї частини часового періоду, у відповідності з першим профілем швидкості, першого геометричного положення при вібрації на друге геометричне положення при вібрації згаданого гіроскопу; і - зміни другим способом, протилежним до першого способу, під час іншої частини часового періоду, у відповідності з другим профілем швидкості, другого геометричного положення при вібрації на перше геометричне положення при вібрації згаданого гіроскопу; при цьому командний сигнал має нульове середнє значення протягом часового періоду, а перший і другий профіль швидкості вказують швидкість зміни геометричного положення при вібрації як функцію від часу; і при цьому виміряні параметри, надані гіроскопічною системою, базуються на скорегованому сигналі, який представляє зміну геометричного положення при вібрації і одержаний відніманням командного сигналу від вимірювального сигналу, який надається гіроскопом. В одному варіанті виконання представленого винаходу, гіроскопічна система включає вібраційний гіроскоп, який надає вимірювальний сигнал, який представляє зміну його геометричного положення при вібрації як функцію від часу. Вираз "геометричне положення при вібрації", який відноситься до гіроскопу, позначає положення стоячої хвилі. Фігура 1-A зображає таку стаціонарну хвилю. Зображена тут хвиля має чотири вузли a, b, c, d і чотири пучності e, f, g, h навколо периферії напівсферичного резонатора 101. Ці чотири пучності і чотири вузла чергуються і розташовані через однакові проміжки в 45°. Вузли є точками на стоячій хвилі, де переміщення є мінімальним, а пучності є точками на стоячій хвилі, де переміщення є максимальним. Робота напівсферичного резонаторного гіроскопу вимагає точного відслідковування переміщення стоячої хвилі, що, у свою чергу, вимагає точного положення вузлів і пучностей, які визначаються. Положення цієї стоячої хвилі або геометричне положення при вібрації гіроскопа може змінюватися так, що зображені вузли і пучності не розташовані, як показано, а зміщені. 1 UA 102114 C2 5 10 15 20 25 30 35 40 45 50 55 До цього вібраційного гіроскопа переважно протягом певного періоду часу подається періодичний командний сигнал, який адаптований до зміни геометричного положення при вібрації гіроскопа першим способом протягом однієї частини часового періоду і згідно з першим профілем швидкості, а потім протилежним способом згідно з другим профілем швидкості. Вимірювальний сигнал, який надається вібраційним гіроскопом, таким чином, базується на вимірюваннях, здійснюваних в різних геометричних положеннях при вібрації, з результатом, який полягає у тому, що похибки вимірювання, які пов'язані з геометричними положеннями при вібрації вібраційного гіроскопа, можуть усуватися або осереднюватися. Окрім того, необхідно відняти від цього вимірювального сигналу, який надається вібраційним гіроскопом, періодичний командний сигнал, який надсилається до його для одержання кінцевих скорегованих гіроскопічних виміряних параметрів. Періодичний командний сигнал може відповідати, протягом періоду часу, зміні першим способом першого геометричного положення при вібрації на друге геометричне положення при вібрації, при цьому ця зміна геометричного положення при вібрації здійснюється згідно з першим профілем швидкості, а потім зміні другим способом другого геометричного положення при вібрації на перше геометричне положення при вібрації, при цьому ця зміна положення здійснюється згідно з другим профілем швидкості. В одному варіанті виконання представленого винаходу, кожен з цих профілів швидкості вказує зміну швидкості обертання у геометричному положенні при вібрації як функцію від часу, яка надається командним сигналом. В одному варіанті виконання представленого винаходу, другий профіль швидкості обернений до першого профілю швидкості як функція від часу. Таким чином, застосовуваний командний сигнал є симетричним з кожної сторони по відношенню до середини його часового періоду. В одному варіанті виконання, перша і друга частина часового періоду можуть бути однаковими. В одному варіанті виконання, вимірювальний сигнал від гіроскопу і командний сигнал виражаються як виміряні параметри, надані гіроскопічною системою, або як величини кута або як величини кутової швидкості. У цьому випадку, переважно не потрібно здійснювати будь-яке інтегрування сигналів до віднімання командного сигналу від вимірювального сигналу. Дякуючи цим ознакам, виміряні параметри, які надаються гіроскопічною системою, яка включає вібраційний гіроскоп, можуть переважно базуватися на вимірювальному сигналі, який надається вібраційним гіроскопом, геометричне положення при вібрації якого змінюється згідно з першим і другим профілем швидкості. В одному варіанті виконання представленого винаходу, виміряні параметри, які надаються гіроскопічною системою, відповідають величинам кутової швидкості, кожна з яких одержується з ділення різниці двох геометричних положень при вібрації скорегованого сигналу, відокремлених цілим числом часових періодів, на час, який відповідає цілому числу часових періодів. Діючи цим способом, можна одержувати гіроскопічні вимірювані величини, у яких не тільки усунуті похибки, які відносяться до геометричних положень при вібрації вібраційного гіроскопу, але й також величини, на які не вплинули похибки, які відносяться до відмінностей між масштабними коефіцієнтами вимірювального сигналу і командного сигналу протягом усього періоду часу. Протягом менш ніж усього періоду часу шляхом віднімання у цей спосіб одного сигналу від іншого, результуючий сигнал може містити похибку, названу похибкою масштабного коефіцієнта (або прецесією). В даному контексті, ця похибка масштабного коефіцієнта може відповідати тому факту, що скорегований сигнал все ще має залишки командного сигналу або все ще має залишковий командний сигнал. Встановлюючи різницю між двома геометричними положеннями при вібрації вібраційного гіроскопу, які відокремлені в часі цілим числом періодів командного сигналу, можна усунути похибки, які відносяться до масштабного коефіцієнта. Потім, ділячи цю різницю геометричних положень при вібрації на часовий період, який відокремлює ці два положення, одержують кутову швидкість, яка не містить похибок масштабного коефіцієнта. В одному варіанті виконання представленого винаходу, вимірювані параметри, які надаються гіроскопічною системою, додатково одержуються фільтруванням нижніх частот скорегованого сигналу. Фільтруючи у цей спосіб скорегований сигнал, також можна уникати появи похибок масштабного коефіцієнта, які можуть шкідливо впливати на скорегований сигнал. Якщо скорегований сигнал розглядається протягом відносно довгого періоду часу, то залишковий командний сигнал може потім розглядатися як сигнал з високою частотою по відношенню до скорегованого сигналу і, тому, може фільтруватися фільтром нижніх частот. Під відносно 2 UA 102114 C2 5 10 15 20 25 довгим періодом часу розуміють часовий період, який відповідає 20 або більшій кількості часових періодів командного сигналу. У вищезгаданому контексті, періодичний сигнал може, таким чином, переважно застосовуватися під час часового інтервалу, достатньо довгого для розгляду командного сигналу як високочастотного сигналу по відношенню до вимірювального сигналу від вібраційного гіроскопу, до надання параметрів вимірювань, здійснюваних гіроскопічною системою. Потім, після застосування фільтрування нижніх частот, гіроскопічні вимірювані параметри, які відповідають одному варіанту виконання, можуть надаватися на основі відфільтрованого скорегованого сигналу, беручи до уваги ковзний часовий інтервал, ширина якого принаймні дорівнює вищевказаному часовому інтервалу. В цьому контексті, можна зачекати протягом мінімального часового періоду до надання параметрів, виміряних гіроскопічною системою, для надання можливості фільтрування залишкового командного сигналу, обробленого як високочастотний сигнал скорегованого сигналу. Цей мінімальний часовий період переважно визначається як функція періодичності застосовуваного командного сигналу. Необхідно визначити мінімальний часовий період так, щоб командний сигнал вважався високочастотним сигналом по відношенню до вимірювального сигналу, який надається вібраційним гіроскопом. Період і стала швидкість поширення командного сигналу можуть визначатися так, щоб перше та друге геометричне положення при вібрації вібраційного гіроскопа відокремлювалися величиною 2/kN радіан, де N є частотною модою вібрації вібраційного гіроскопа, а k є додатнім цілим числом, визначеним як функція порядку коригованих похибок. Відслідковуючи у цей спосіб кутову амплітуду для геометричного положення при вібрації вібраційного гіроскопу, можна коригувати різні порядки похибки геометричного положення при вібрації гіроскопа, оскільки будь-яка така похибка по суті задовольняє наступне рівняння, у якому є геометричним положенням при вібрації, а n є цілим числом: похибка n1 an sin(nN ) bn cos(nN ) 30 35 40 45 50 55 Наприклад, для k, рівного 1, і N, рівного 2, можуть коригуватися усі порядки похибки. Головним чином можна осереднити похибки порядку, який відповідає n, більшому за або рівному k. Реалізуючи цей спосіб, нарешті одержуємо скорегований сигнал з вимірювального сигналу від вібраційного гіроскопу, у якому залишковий командний сигнал, пов'язаний з масштабним коефіцієнтом, який призвів до зміни його геометричного положення при вібрації, як описано вище, фільтрують як високочастотний сигнал. З цього скорегованого і відфільтрованого сигналу, переважно можна осереднювати похибки вимірювання, які стосуються геометричного положення при вібрації вібраційного гіроскопу. Через це такі похибки можуть усуватися. Другий аспект представленого винаходу пропонує гіроскопічну систему, яка включає засоби, пристосовані до реалізації способу вимірювання, який відповідає варіанту виконання представленого винаходу. Така гіроскопічна система може включати: - вібраційний гіроскоп, який вібрує в початковому першому геометричному положенні і надає вимірювальний сигнал; - командний блок, пристосований до надання періодичного командного сигналу протягом періоду часу, придатного: - до зміни першим способом під час однієї частини часового періоду, у відповідності з першим профілем швидкості, першого геометричного положення на друге геометричне положення згаданого гіроскопу; і - зміни другим способом, протилежним до першого способу, під час іншої частини часового періоду, у відповідності з другим профілем швидкості, другого геометричного положення при вібрації на перше геометричне положення при вібрації згаданого гіроскопу; при цьому згаданий командний сигнал має нульове середнє значення протягом згаданого часового періоду, а перший і другий профіль швидкості вказують швидкість зміни геометричного положення при вібрації як функції від часу; і - блок обробки, пристосований до надання скорегованого сигналу, який представляє зміну геометричного положення при вібрації і одержаний відніманням командного сигналу від вимірювального сигналу, який надається вібраційним гіроскопом. Другий профіль швидкості може бути оберненим до першого профілю швидкості як функція від часу. 3 UA 102114 C2 5 10 15 20 25 30 35 40 45 50 55 60 Вона додатково може включати на виході блоку обробки розрахунковий блок, пристосований до подачі гіроскопічних виміряних параметрів, які відповідають величинам кутової швидкості, кожна з яких одержується з ділення різниці двох геометричних положень при вібрації скорегованого сигналу, відокремлених цілим числом часових періодів, на величину часу, яка відповідає цілому числу часових періодів. Вона також може включати на виході блоку обробки фільтр нижніх частот, пристосований до фільтрування високочастотних компонентів скорегованого сигналу. В цій гіроскопічній системі, період та стала швидкість поширення командного сигналу можуть визначатися так, щоб перше і друге геометричне положення при вібрації вібраційного гіроскопу відокремлювалися 2/kN радіанами, де N є частотною модою вібрації вібраційного гіроскопу, а k є додатнім цілим числом, визначеним як функція порядку коригованих похибок. Інші ознаки і переваги винаходу стануть зрозумілішими при читанні наступного опису. Він є чисто ілюстративним і повинен читатися з посиланням на додані креслення, на яких: - Фігура 1-A зображає геометричне положення при вібрації вібраційного гіроскопу; - Фігура 1-B зображає головні етапи способу вимірювання гіроскопічною системою, який відповідає одному варіанту виконання представленого винаходу; - Фігура 1-C зображає перший і другий профіль швидкості як функцію від часу одного варіанта виконання представленого винаходу; - Фігура 2-A зображає архітектуру гіроскопічної системи, яка відповідає одному варіанту виконання представленого винаходу; - Фігура 2-B зображає скорегований сигнал і відфільтрований скорегований сигнал, які відповідають одному варіанту виконання представленого винаходу; - Фігури 3 і 4 зображають командний сигнал і його інтегрування в одному варіанті виконання представленого винаходу; і - Фігура 5 зображає архітектуру гіроскопічного сигналу в іншому варіанті виконання представленого винаходу. Фігура 1 зображає головні етапи способу вимірювання, який відповідає одному варіанту виконання представленого винаходу. На етапі 11, періодичний командний сигнал, пристосований до зміни геометричного положення при вібрації першим способом, застосовується під час частини періоду періодичного командного сигналу. Завдяки цьому застосовуваному командному сигналу геометричне положення при вібрації вібраційного гіроскопа змінюється першим способом зі швидкістю, яка може змінюватися як функція від часу згідно з особливим першим профілем. Таким чином, вібраційний гіроскоп переміщається з першого геометричного положення при вібрації в друге геометричне положення при вібрації. Цей перший профіль швидкості може рівноцінно відповідати сталій швидкості, у випадку чого геометричне положення при вібрації змінюється неперервним чином протягом частини розглядуваного часового періоду. Потім, на етапі 12 застосовується командний сигнал, який адаптований до зміни геометричного положення при вібрації другим способом, протилежним до першого способу, під час іншого часового періоду командного сигналу. Тут командний сигнал змінює друге геометричне положення при вібрації на перше геометричне положення при вібрації гіроскопу, при цьому ця зміна здійснюється зі швидкістю, яка може змінюватися як функція від часу згідно з другим профілем швидкості. Командний сигнал має нульову середню величину протягом періоду періодичного командного сигналу. В одному варіанті виконання, другий профіль швидкості є першим профілем швидкості, оберненим як функція від часу. Таким чином, перший і другий профіль швидкості симетричні один відносно іншого по відношенню до центру часового періоду. Тому, після етапу 12, вібраційний гіроскоп потім перебуває в початковому геометричному положенні при вібрації, тобто, в першому геометричному положенні при вібрації. Відмічаємо, що, в одному варіанті виконання представленого винаходу, перший і другий профіль швидкості вказують сталу швидкість як функцію від часу, тому з нульовою зміною, тобто, положення при вібрації міняється зі сталою швидкістю як першим способом так і другим способом. Тому, цей командний сигнал є періодичним сигналом прецесії, пристосованим до спричинення змінної прецесії у вібраційному гіроскопі. Етапи 11 і 12 потім повторюються для надання виміряних параметрів від вібраційного гіроскопу протягом певного часового періоду, коли гіроскоп прецесіює. В такому контексті, вимірювальний сигнал від вібраційного гіроскопу може переважно бути доступним для різних геометричних положень при вібрації. Потім цього достатньо для віднімання від вимірювального сигналу вібраційного гіроскопу командного сигналу, надісланого 4 UA 102114 C2 5 10 15 20 25 30 35 40 45 50 55 60 до вібраційного гіроскопу, для одержання на етапі 13 скорегованого сигналу. Під командним сигналом тут розуміють сигнал, який вказує зміну величин кута як функцію від часу. У цьому випадку, якщо вимірювальний сигнал від гіроскопа відповідає величинам кута, то операція віднімання може застосовуватися безпосередньо до сигналу і якщо вимірювальний сигнал відповідає величинам кутової швидкості, то існує потреба у визначенні в цілому командного сигналу для одержання командного сигналу у формі величин кута і для надання можливості віднімати його від вимірювального сигналу. Відмічаємо, що етап 13 може виконуватися безперервно, тоді як етапи 11 і 12 виконуються поступово. Виміряні параметри, які надаються гіроскопічною системою, можуть потім базуватися на скорегованому сигналі, який представляє зміну геометричного положення при вібрації гіроскопу і одержується відніманням командного сигналу від вимірювального сигналу, який надається гіроскопом під час виконання етапів 11 і 12. Фігура 1-C зображає перший і другий профіль швидкості в одному варіанті виконання представленого винаходу. Фігура 1-C зображає командний сигнал як функцію від часу, тобто, зміну кутової швидкості як функцію від часу. Тут кутова швидкість, яка відповідає командному сигналу для зміни геометричного положення при вібрації гіроскопа, безперервно зростає протягом першої частини періоду командного сигналу і зменшується у той же спосіб що й зростає симетрично протягом другої частини періоду командного сигналу. Таким чином, частина 101 показує перший профіль швидкостей, а частина 102 показує другий профіль швидкостей, при цьому ці два профілі швидкостей тимчасово обернені один відносно іншого. Після цього тільки для ілюстрації, перший і другий профіль швидкості вказують нульову зміну швидкості як функцію від часу, тобто сталу величину швидкості. Фігура 2-A зображає архітектуру гіроскопічної системи, яка включає засоби, адаптовані для реалізації способу вимірювання, який відповідає одному варіанту виконання представленого винаходу. В одному варіанті виконання, гіроскопічна система включає принаймні один вібраційний гіроскоп 21, пристосований до прийому і інтерпретації командних сигналів, прийнятих від командного блоку 22. Такий командний блок 22 пристосований до надсилання командних сигналів для контролю зміни геометричного положення при вібрації гіроскопа 21. Точніше, такий командний блок 22 генерує командний сигнал для зміни зі сталою кутовою швидкістю першого на друге геометричне положення при вібрації вібраційного гіроскопу. Така гіроскопічна система додатково включає блок 26 обробки, який приймає, з одного боку, командні сигнали від командного блоку 22, а, з іншого боку – вимірювальний сигнал від гіроскопу 21. Блок 26 обробки включає інтегрувальний блок 23, пристосований до прийому командного сигналу, надісланого командним блоком 22, який вказує величини кута, і до інтегрування цих командних сигналів. Цей блок 26 обробки додатково включає блок 24 віднімання сигналів, який приймає на одній стороні вимірювальний сигнал від вібраційного гіроскопу 21, а на іншій стороні - інтегрований командний сигнал, наданий інтегрувальним блоком 23, при цьому цей блок 26 обробки надає на виході 25 скорегований сигнал. Тут відзначаємо, що скорегований сигнал, наданий на виході блоку обробки, містить похибку, яка відноситься до масштабного коефіцієнта. Тому, залишковий сигнал, пов'язаний з командним сигналом, може все ще бути присутнім у скорегованому сигналі і через це може погіршувати характеристики гіроскопічних вимірюваних параметрів, які надаються гіроскопічною системою. Для уникнення цієї залишкової похибки, яка відноситься до масштабного коефіцієнта, тут може, зокрема, існувати потреба у застосуванні командного сигналу протягом часового інтервалу, досить довгого для розгляду залишкового сигналу як високочастотного сигналу і, таким чином, відфільтрованого. У цьому випадку, після цього часового інтервалу, може починатися фільтрування скорегованого сигналу. Потім, продовжуючи надсилати періодичний командний сигнал до вібраційного гіроскопу, можна надавати високоякісні гіроскопічні виміряні параметри протягом ковзного часового вікна, яке відповідає принаймні такому часовому інтервалу. Для цього, на виході 25 гіроскопічної системи, зображеної на фігурі 2-А, може передбачатися фільтр нижніх частот. В одному варіанті виконання представленого винаходу, на вихід 25 може подаватися cкорегований сигнал величини кутової швидкості, а не вищевказаний сигнал величини кута. В цьому контексті, якщо командний сигнал безпосередньо вказує величини кута, то інтегрувальний блок 23 не потрібен в архітектурі. 5 UA 102114 C2 5 10 15 20 25 30 35 40 45 50 Таким чином, Фігура 2-B зображає скорегований сигнал 202, який надається на виході 25 блоку обробки, у якому залишок трикутного командного сигналу є по суті видимим. Відфільтрований скорегований сигнал 201 потім відповідає вихідному сигналу фільтра нижніх частот. Відфільтрований скорегований сигнал 201 відповідає тут сигналу, для якого надаються гіроскопічні виміряні параметри гіроскопічної системи, яка відповідає одному варіанту виконання представленого винаходу. При застосуванні у цей спосіб фільтрування, така гіроскопічна система може переважно надавати високоякісні гіроскопічні виміряні параметри, навіть якщо масштабний коефіцієнт невідомий. Фігура 3 зображає командний сигнал в одному варіанті виконання представленого винаходу. Цей сигнал зображений в системі координат, у якій час вказується на вісі абсцис, а запрограмована швидкість зміни геометричного положення при вібрації вібраційного гіроскопу вказується на вісі ординат. Тут командний сигнал є прямокутним сигналом, який представляє зміну швидкості обертання, застосовуваної для вібраційного гіроскопу, як функцію від часу. Тут необхідне застосування швидкості обертання величини X і, альтернативно, -X, відповідно для послідовних частин T/2 часового періоду. Тому швидкість обертання тут є сталою протягом кожної з частин T/2 часового періоду і поперемінно додатною і від'ємною протягом двох послідовних частин T/2 часового періоду. Може застосовуватися, наприклад, швидкість обертання, яка становить 0,5 градусів в секунду - 20 градусів в секунду. Відмічаємо. що у варіанті виконання, у якому командний сигнал фільтрують, чим коротша періодичність командного сигналу, тим гіроскопічна система може швидше надавати скорегований сигнал і, таким чином, високоякісні виміряні параметри. Командний сигнал, як показано на Фігурі 3, надсилається як до вібраційного гіроскопу 21 так і до блоку 26 обробки. Після прийому командного сигналу в блоці 26 оброки, командний сигнал, який відповідає величині кутової швидкості, спершу інтегрують. Таким чином, в одному варіанті виконання представленого винаходу, інтеграл від командного сигналу, як показано на Фігурі 3, подається на вихід інтегрувального блоку 23 у формі сигналу, як показано на Фігурі 4. Цей сигнал є періодичним трикутним сигналом з періодом 2T, який представляє зміну геометричного положення при вібрації вібраційного гіроскопу 21 як функцію від часу. Програмуючи однорідну зміну положення при вібрації на кут величиною 2/kN радіан, можна осереднювати похибки у вимірювальному сигналі від гіроскопу у відповідності з наступним рівнянням, при цьому похибки можуть виражатися у формі sin(nN) або cos(nN): де N є частотною модою вібрації вібраційного гіроскопу; де k є додатнім цілим числом; де n є цілим числом, яке відповідає порядку коригованої похибки; і де 0 є початковим геометричним положенням при вібрації вібраційного гіроскопу. Відмічаємо, що ціле число kможе визначатися згідно з порядком похибок у вимірювальному сигналі від вібраційного гіроскопу, які необхідно коригувати. Для величини k, рівної 1, і вібраційного гіроскопу, для якого частотна мода дорівнює 2 (тобто N=2), можна осереднювати похибки будь-якого порядку, які відносяться до геометричного положення при вібрації гіроскопу. Для k, рівного 1, і для вібраційного гіроскопу, для якого частотна мода дорівнює 2, тобто, для якого N дорівнює 2, похибки порядку n, більшого за або рівного 1, коригуються згідно з наступним рівнянням: N (частотна мода вібрації вібраційного гіроскопу) може, наприклад, бути рівним 2 або рівним 3, як у вібраційному гіроскопі, описаному, наприклад, в документі US7281426. Тут може з'являтися потреба у відніманні залишкового командного сигналу, пов'язаного з масштабним коефіцієнтом, від вимірювального сигналу шляхом визначення різниці між першою кутовою величиною, виміряною на початку періоду командного сигналу, і другою кутовою величиною, виміряною в кінці такого періоду, і діленням цієї різниці на величину періоду. 6 UA 102114 C2 5 10 15 20 Тут може з'являтися потреба у врахуванні двох геометричних положень при вібрації, які займає вібраційний гіроскоп у двох моментах часу, відокремлених одним або більшою кількістю періодів командного сигналу. У цьому випадку, різницю між двома положеннями потім ділять на кількість періодів, які відділяють ці два геометричні положення при вібрації. Тому, тут надають величину кутової швидкості. Цю величину кутової швидкості переважно коригують для похибки, яка стосується масштабного коефіцієнта. Фігура 5 зображає архітектуру гіроскопічної системи, пристосованої до надання таких величин кутової швидкості в одному варіанті виконання представленого винаходу. Зображена архітектура подібна частково до архітектури, описаної з посиланням на Фігуру 2A, з іншим вихідним блоком 25 обробки, але рівноцінно передбачена для усунення залишку командного сигналу, який залишається у скорегованому сигналі і пов'язаний з масштабним коефіцієнтом. Тут існує потреба в обробці скорегованого сигналу на виході 25 блоку 26 обробки розрахунковим блоком 53, який використовує принцип FIFO (Першим прийшов – Першим Обслужений) 51. Згідно з цим принципом FIFO 51, зберігаються кутові величини, надані на виході блоку 26 обробки, для цілого числа періодів 2T командного сигналу. Потім блок 52 віднімання разом з блоком 54 ділення здатен застосовувати наступне рівняння для подачі на вихід 55 виміряних кутових швидкостей, які коригуються не тільки відносно похибок, які відносяться до геометричного положення при вібрації вібраційного гіроскопу, але й також відносно похибок, пов'язаних з масштабним коефіцієнтом: Встановлюючи різницю протягом періоду M2T, можна усунути масштабний коефіцієнт. ФОРМУЛА ВИНАХОДУ 25 30 35 40 45 50 55 1. Спосіб гіроскопічного вимірювання, здійснюваного гіроскопічною системою, яка включає вібраційний гіроскоп; при цьому згаданий гіроскоп вібрує в початковому першому геометричному положенні і надає вимірювальний сигнал; при цьому надсилають періодичний командний сигнал до вібраційного гіроскопа протягом певного періоду часу, при цьому періодичний командний сигнал адаптований до: зміни на першому кроці (11) під час однієї частини часового періоду, у відповідності з першим профілем швидкості, першого геометричного положення при вібрації на друге геометричне положення при вібрації згаданого гіроскопа; і зміни на другому кроці (12), в протилежному напрямку до першого кроку, під час іншої частини часового періоду, у відповідності з другим профілем швидкості, другого геометричного положення при вібрації на перше геометричне положення при вібрації згаданого гіроскопа; при цьому згаданий командний сигнал має нульове середнє значення протягом згаданого часового періоду, а перший і другий профіль швидкості вказують швидкість зміни геометричного положення при вібрації як функцію від часу; і при цьому виміри (13), здійснені гіроскопічною системою, базуються на скорегованому сигналі, який відповідає зміні значень геометричного положення при вібрації і одержаний відніманням командного сигналу від вимірювального сигналу, наданого гіроскопом. 2. Спосіб за п. 1, який відрізняється тим, що другий профіль швидкості обернений до першого профілю швидкості як функція від часу. 3. Спосіб за п. 1, який відрізняється тим, що дві частини часового періоду ідентичні. 4. Спосіб за будь-яким із пп. 1-3, який відрізняється тим, що вимірювальний сигнал від гіроскопа і командний сигнал виражають як результати вимірів, здійснених гіроскопічною системою або у вигляді величин кута, або у вигляді величин кутової швидкості. 5. Спосіб гіроскопічного вимірювання за одним із пп. 1-3, який відрізняється тим, що результати вимірів, здійснені гіроскопічною системою, відповідають величинам кутової швидкості, кожна з яких одержується з ділення різниці між двома значеннями геометричного положення при вібрації скорегованого сигналу, відокремленими цілим числом часових періодів, на час, який відповідає цілому числу часових періодів. 6. Спосіб гіроскопічного вимірювання за будь-яким із пп. 1-3, який відрізняється тим, що виміри, здійснені гіроскопічною системою, одержують фільтруванням нижніх частот скорегованого сигналу. 7. Спосіб гіроскопічного вимірювання за п. 6, який відрізняється тим, що до надання результатів вимірів, здійснюваних гіроскопічною системою, надсилають періодичний сигнал під 7 UA 102114 C2 5 10 15 20 25 30 35 40 час часового інтервалу, достатньо довгого для надання можливості розглядання командного сигналу як високочастотного сигналу по відношенню до вимірювального сигналу від вібраційного гіроскопа. 8. Спосіб гіроскопічного вимірювання за будь-яким із попередніх пунктів, який відрізняється тим, що часовий період, перший та другий профілі швидкості командного сигналу визначають так, що перше і друге геометричне положення при вібрації вібраційного гіроскопа відокремлені 2/kN радіанами, де N є частотною модою вібрації вібраційного гіроскопа; і де k є додатнім цілим числом, визначеним в залежності від порядку коригованих похибок. 9. Гіроскопічна система, яка має: вібраційний гіроскоп (21), який здатен вібрувати у початковому першому геометричному положенні і надавати вимірювальний сигнал; командний блок (22), виконаний з можливістю надання періодичного командного сигналу протягом часового періоду, пристосованого до: зміни на першому кроці під час однієї частини часового періоду, у відповідності з першим профілем швидкості, першого геометричного положення при вібрації на друге геометричне положення при вібрації згаданого гіроскопа; і зміни на другому кроці, в протилежному напрямку до першого кроку, під час іншої частини часового періоду, у відповідності з другим профілем швидкості, другого геометричного положення при вібрації на перше геометричне положення при вібрації згаданого гіроскопа; при цьому згаданий командний сигнал має нульове середнє значення протягом згаданого часового періоду, а перший і другий профіль швидкості вказує швидкість зміни геометричного положення при вібрації як функцію від часу; і блок (26) обробки, виконаний з можливістю надання скорегованого сигналу, який відповідає зміні значень геометричного положення при вібрації і одержаний відніманням командного сигналу від вимірювального сигналу, який надається вібраційним гіроскопом. 10. Гіроскопічна система за п. 9, яка відрізняється тим, що другий профіль швидкості обернений до першого профілю швидкості як функція від часу. 11. Гіроскопічна система за п. 9 або п. 10, яка відрізняється тим, що додатково має розрахунковий блок (53) на виході блока (26) обробки, виконаного з можливістю надання результатів гіроскопічних вимірів, які відповідають величинам кутової швидкості, кожна з яких одержана з ділення різниці між двома значеннями геометричного положення при вібрації скорегованого сигналу, відокремлених цілим числом часових періодів, на час, який відповідає цілому числу часових періодів. 12. Гіроскопічна система за п. 9, яка відрізняється тим, що додатково має фільтр нижніх частот на виході блока (26) обробки, виконаний з можливістю фільтрування високочастотних компонентів скорегованого сигналу. 13. Гіроскопічна система за будь-яким із пп. 9-12, яка відрізняється тим, що часовий період, перший і другий профілі швидкості командного сигналу визначені так, що перше і друге геометричне положення при вібрації вібраційного гіроскопа відокремлені 2/kN радіанами, де N є частотною модою вібрації вібраційного гіроскопа, і де k є додатнім цілим числом, визначеним в залежності від порядку коригованих похибок. 8 UA 102114 C2 9 UA 102114 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for gyroscopic measurement with vibrating gyroscope
Автори англійськоюLignon, Christian, Carre, Arnauld
Назва патенту російськоюСпособ гироскопического измерения вибрационным гироскопом
Автори російськоюЛиньйон Кристиан, Карр Арно
МПК / Мітки
МПК: G01C 19/56
Мітки: спосіб, гіроскопом, гіроскопічного, вібраційним, вимірювання
Код посилання
<a href="https://ua.patents.su/12-102114-sposib-giroskopichnogo-vimiryuvannya-vibracijjnim-giroskopom.html" target="_blank" rel="follow" title="База патентів України">Спосіб гіроскопічного вимірювання вібраційним гіроскопом</a>
Спосіб вимірювання кутової швидкості коріолісовим вібраційним гіроскопом
Номер патенту: 73632
Опубліковано: 15.08.2005
Автори: Чіковані Валерій Валеріанович, Яценко Юрій Олексійович, Коваленко Володимир Анатолійович
МПК: G01P 9/00
Мітки: швидкості, вимірювання, вібраційним, спосіб, коріолісовим, кутової, гіроскопом
Формула / Реферат:
1. Спосіб вимірювання кутової швидкості вібраційним гіроскопом шляхом генерування основної вібраційної хвилі, яка формує опорний сигнал на частоті, близькій або рівній одній з безлічі резонансних мод вібраційної структури, яка містить електроди збудження, електроди управління та інформативні електроди і обертання навколо осі симетрії якої збуджує додаткову вібраційну хвилю, амплітуда якої пропорційна кутовій швидкості обертання або...
Спосіб виміру кутової швидкості коріолісовим вібраційним гіроскопом
Номер патенту: 95709
Опубліковано: 25.08.2011
Автор: Чіковані Валерій Валеріанович
МПК: G01P 9/00, G01C 19/00, G01G 19/02, G01G 19/12
Мітки: виміру, спосіб, вібраційним, швидкості, кутової, гіроскопом, коріолісовим
Формула / Реферат:
Спосіб виміру кутової швидкості коріолісовим вібраційним гіроскопом, заснований на генерації стоячої вібраційної хвилі на частоті, близькій або рівній одній з безлічі резонансних мод вібраційної структури, з не менш, ніж двома електродами керування й вимірювальними електродами так, що пучність стоячої вібраційної хвилі розташована поблизу електрода одного з каналів керування, а обертання навколо осі симетрії вібраційної структури викликає...
Спосіб гірокомпасування по сигналу гіроскопічного датчика кутової швидкості
Номер патенту: 74397
Опубліковано: 25.10.2012
Автори: Нужний Олександр Володимирович, Мелешко Владислав Валентинович
МПК: G01C 21/00
Мітки: сигналу, гіроскопічного, гірокомпасування, кутової, датчика, спосіб, швидкості
Формула / Реферат:
Спосіб гірокомпасування по сигналу гіроскопічного датчика кутової швидкості, який полягає в тому, що сигнал гіроскопічного датчика кутової швидкості, встановленого на гіроплатформі, надходить на обчислювальний блок, де формується момент корекції, що подається на двигун стабілізації, який повертає платформу, доки вимірювана гіроскопічним датчиком кутової швидкості східна складова швидкості обертання Землі не стане рівною нулю; корекція...
Спосіб компенсації сил гіроскопічного моменту
Номер патенту: 24572
Опубліковано: 10.07.2007
Автор: Лиховид Юрій Макарович
МПК: G01C 19/00, B64G 1/28
Мітки: компенсації, спосіб, сіль, гіроскопічного, моменту
Формула / Реферат:
1. Спосіб компенсації сил гіроскопічного моменту з обертанням робочого тіла (1) навколо локальної осі (5), з одночасним переміщенням робочого тіла (1) по замкнутій траєкторії (6) навколо осі примусової прецесії (4) та з узгодженням кутової швидкості Ω прецесії робочого тіла (1) з кутовою швидкістю ω обертання робочого тіла (1) навколо локальної осі (5), який відрізняється тим, що локальну вісь (5) обертання робочого тіла (1)...
Сівалка для диференційованої сівби з вібраційним висівним апаратом
Номер патенту: 80351
Опубліковано: 27.05.2013
Автори: Броварець Олександр Олександрович, Аніскевич Леонід Володимирович, Онищенко Володимир Борисович
МПК: A01C 7/00
Мітки: диференційованої, вібраційним, сівби, висівним, апаратом, сівалка
Формула / Реферат:
Сівалка для диференційної сівби з вібраційним висівним апаратом, що складається з висівного апарата, основи, висівного диска, проміжного диска, опори сферичної форми, яка відрізняється тим, що містить спеціальний контролер, GPS-навігатор і пристрій зчитування електронних карток.
Попередній патент: Присад металургійний для десульфурації рідких сплавів на основі заліза
Наступний патент: Двозаміщені фталазини – антагоністи провідного шляху hedgehog
Випадковий патент: Обертовий замковий механізм