Спосіб виміру кутової швидкості коріолісовим вібраційним гіроскопом
Формула / Реферат
Спосіб виміру кутової швидкості коріолісовим вібраційним гіроскопом, заснований на генерації стоячої вібраційної хвилі на частоті, близькій або рівній одній з безлічі резонансних мод вібраційної структури, з не менш, ніж двома електродами керування й вимірювальними електродами так, що пучність стоячої вібраційної хвилі розташована поблизу електрода одного з каналів керування, а обертання навколо осі симетрії вібраційної структури викликає дію сил Коріоліса, що збуджують додаткову стоячу вібраційну хвилю з пучністю, розташованою поблизу електрода іншого каналу керування, амплітуда якої пропорційна кутовій швидкості обертання, який відрізняється тим, що на електроди кожного каналу керування подають сигнали, що встановлюють пучність стоячої вібраційної хвилі посередині між двома електродами керування, а також сигнали, що стабілізують енергію коливань, сигнали, що компенсують кутову швидкість обертання вібраційної структури, й сигнали керування, що вирівнюють частоти коливань вібраційної структури по каналах керування, при цьому кутова швидкість обертання виміряється піврізницею сигналів керування, що компенсують поворот стоячої вібраційної хвилі, викликаний дією кутової швидкості обертання.
Текст
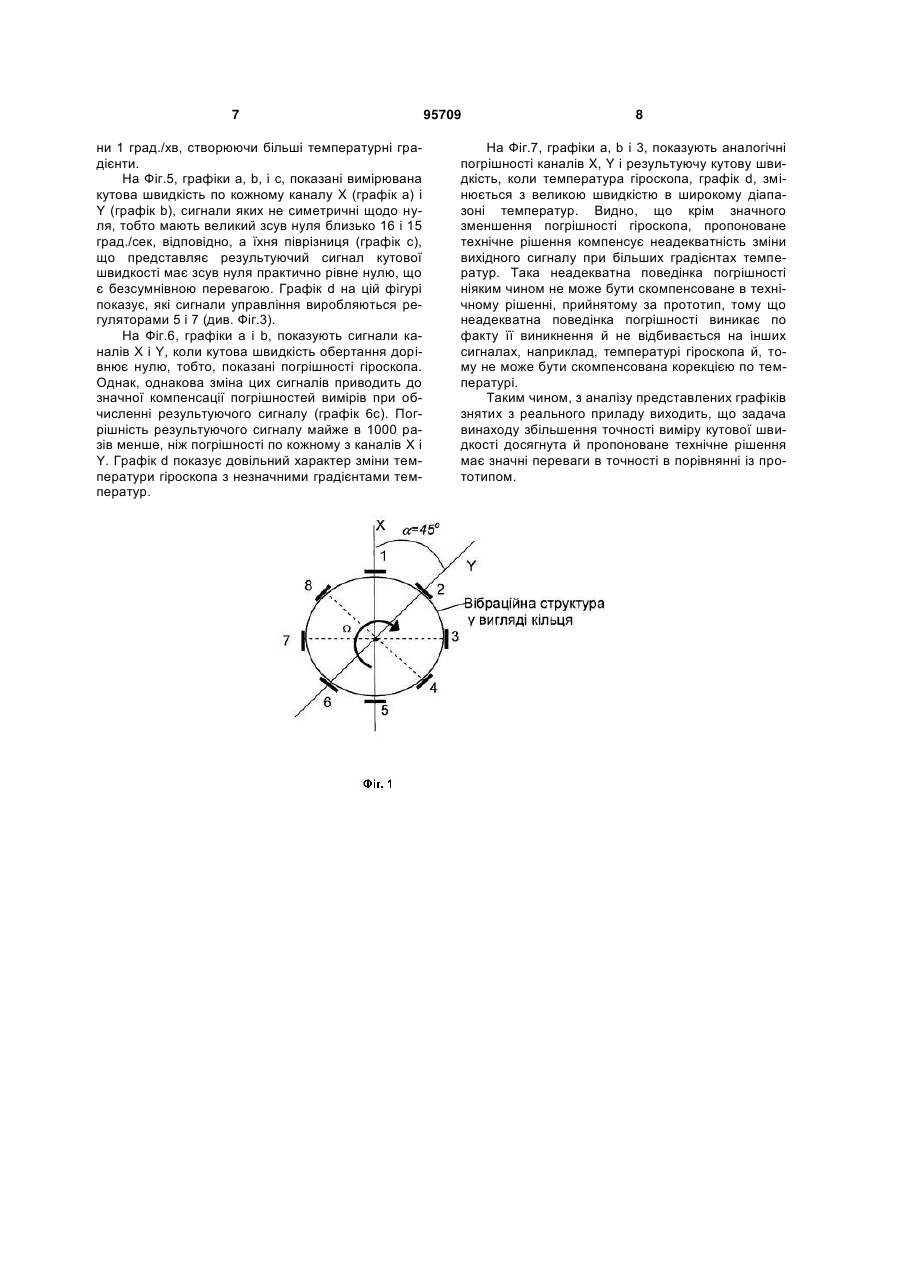
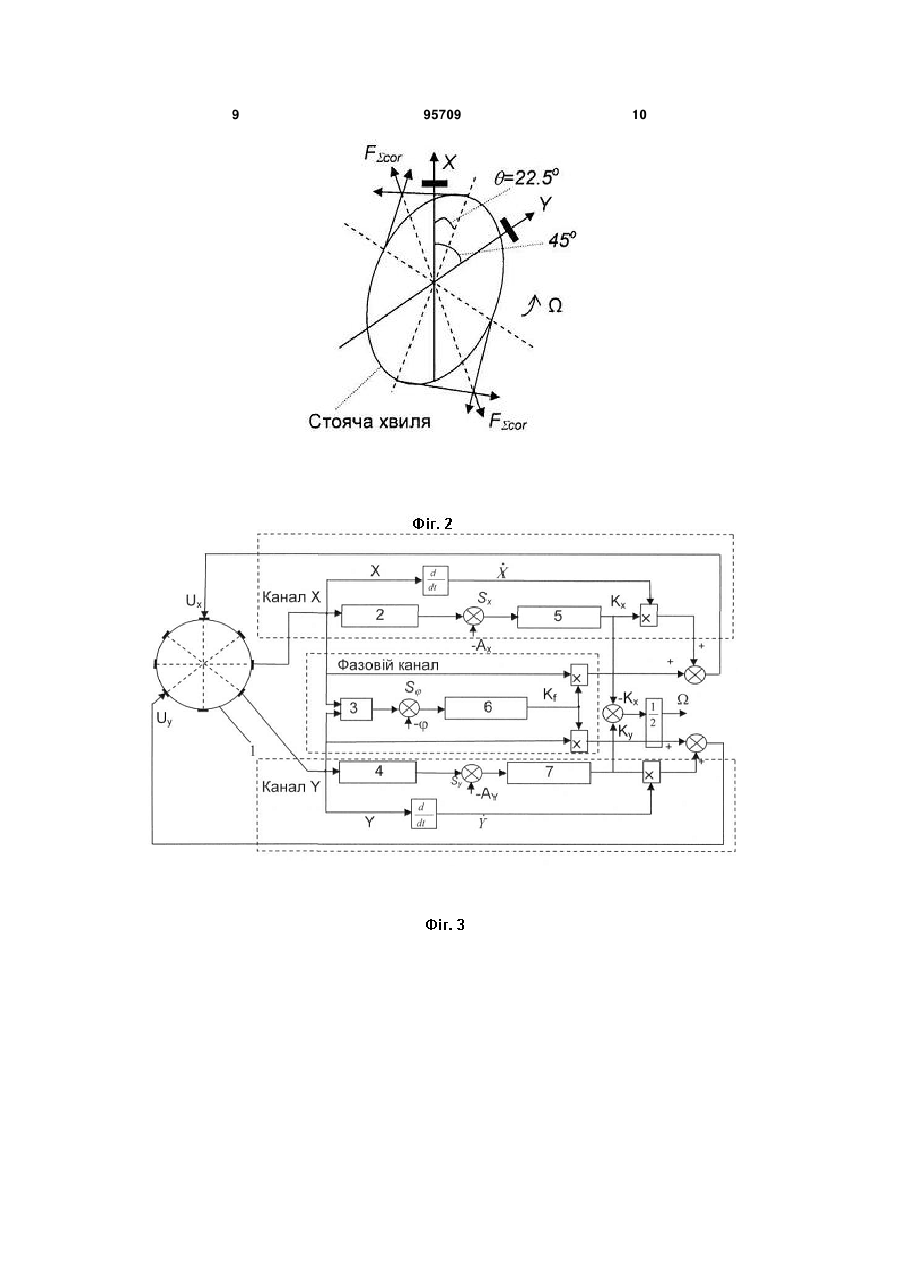
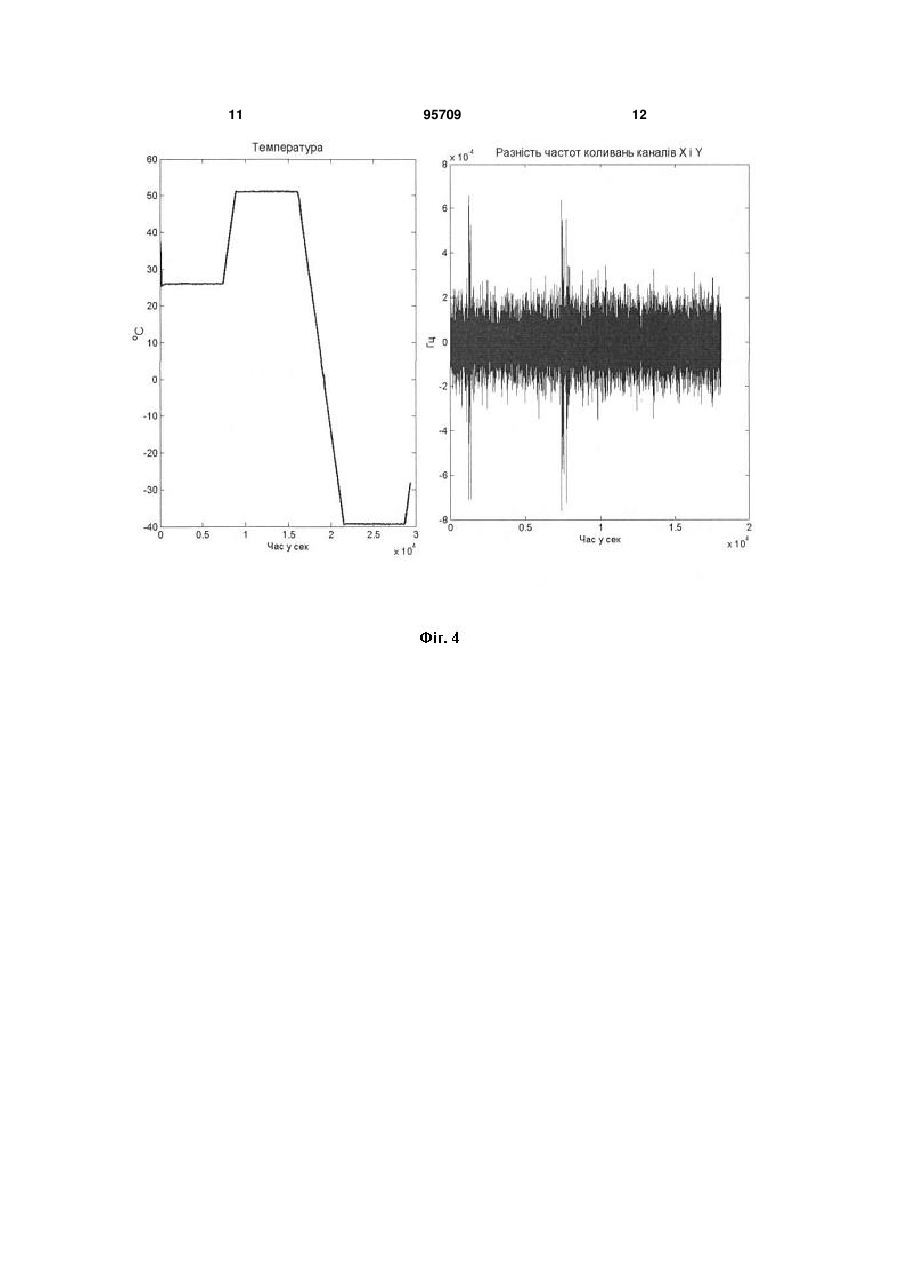
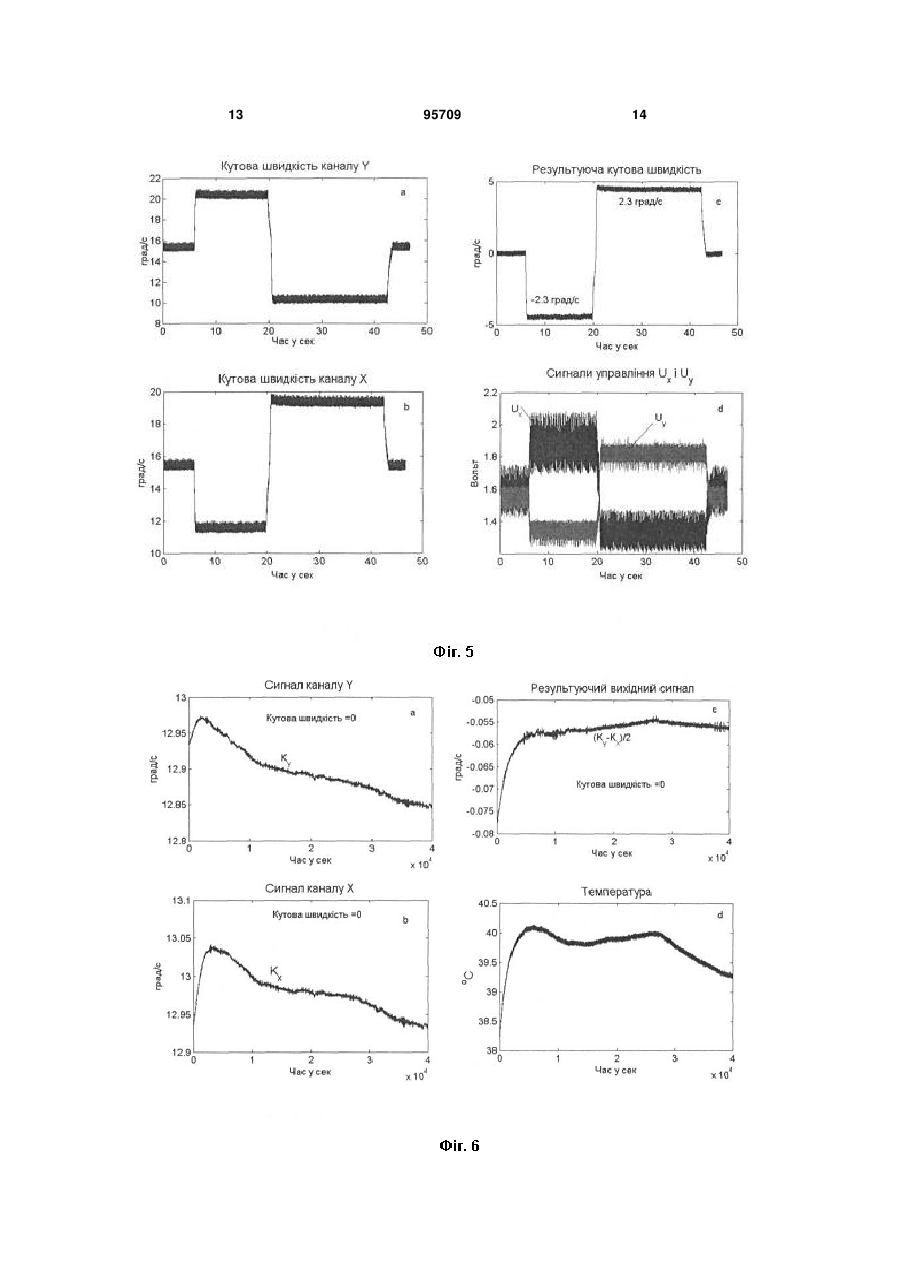
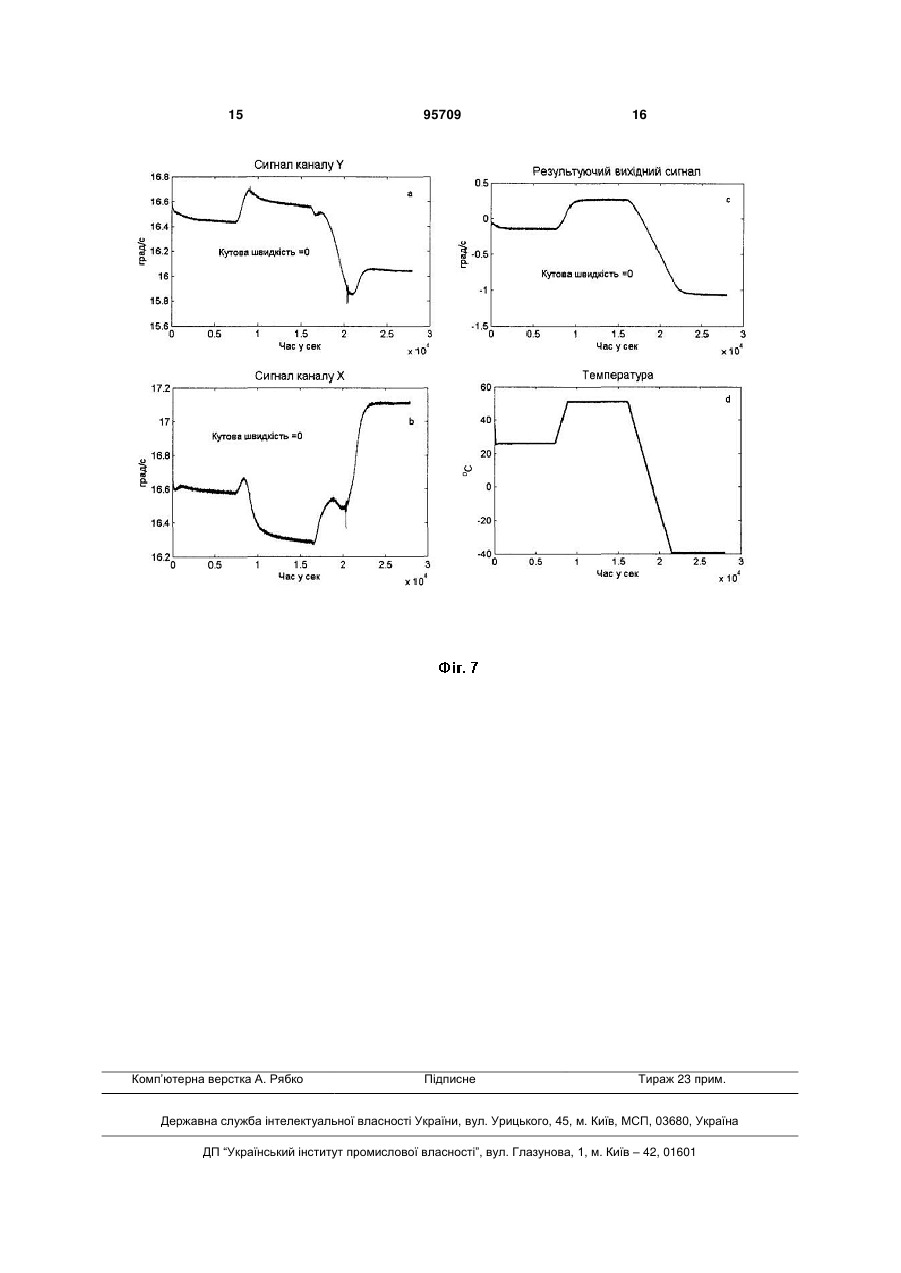
Спосіб виміру кутової швидкості коріолісовим вібраційним гіроскопом, заснований на генерації стоячої вібраційної хвилі на частоті, близькій або рівній одній з безлічі резонансних мод вібраційної C2 2 (19) 1 3 амплітуди коливань, а також компенсує вторинну хвилю, що виникає через дію коріолісових сил при обертанні вібраційної структури. При цьому, сигнали управління, що стабілізують амплітуду коливань і сигнали, що стежать за температурним дрейфом резонансної частоти, а також квадратурна компонента сигналу управління, що компенсує вторинну хвилю, їхньої суми добутків з ваговими коефіцієнтами використаються для корекції температурного дрейфу нуля вихідного сигналу, що збільшує точність виміру кутової швидкості при температурному дрейфі параметрів вібраційної структури. Коефіцієнти корекції в технічному рішенні, викладеному в прототипі, пропонується визначати в процесі калібрування на стендах, наприклад, підприємства-виготовлювача. Недоліком даного методу є значне погіршення точності корекції при відсутності повторюваності вимірів на стенді й у реальних умовах експлуатації приладу. У зв'язку з тим, що умови, при яких проводиться калібрування коефіцієнтів корекції (температура, вологість, тиск, місце розташування щодо джерел тепла й ін.) істотно відрізняються від умов експлуатації, виникають значні погрішності виміру кутової швидкості. Крім того, процес калібрування забирає тривалий час і трудомісткий, тому що необхідно набрати статистику при прогоні по температурному діапазоні, тобто потрібний багаторазовий прогін і обробка результатів вимірів з метою визначення коефіцієнтів корекції. Перед авторами стояла задача збільшення точності за рахунок компенсації погрішностей виміру кутової швидкості в процесі її виміру при дії температурних і інших зовнішніх факторів. У цьому випадку погрішності компенсуються по факту їхнього виникнення й не залежать від повторюваності погрішностей і їхніх коефіцієнтів корекції, а також не потрібно тривалий і трудомісткий процес калібрування. Поставлена задача вирішується тим, що в способі виміру кутової швидкості, заснованому на генерації стоячої вібраційної хвилі на частоті, близькій або рівній одній з безлічі резонансних мод вібраційної структури з не менш, ніж двома каналами управління й вимірювальними каналами так, що пучність стоячої вібраційної хвилі розташована поблизу з електродом одного з каналів управління, а обертання навколо осі симетрії вібраційної структури викликає дію сил Коріоліса, що збуджують додаткову вібраційну хвилю, амплітуда якої пропорційна кутовій швидкості обертання, вводяться нові сигнали управління, які встановлюють пучність стоячої вібраційної хвилі посередині між двома електродами управління, а також стабілізують енергію коливань і вирівнюють частоти коливань по каналах управління, при цьому кутова швидкість обертання виміряється піврізницею сигналів управління, які компенсують коливання, викликані коріолісовими силами. Пропонований спосіб виміру кутової швидкості дозволяє збільшити точність виміру за рахунок виключення погрішностей від зовнішніх і внутрішніх збурювань, що однаково впливають на обидва вимірювальні канали і, тим самим, практично повністю компенсуються при визначенні піврізниці 95709 4 показань у випадку ідентичності й близькості розташування електродів знімання сигналу. Ідентичність каналів забезпечується за рахунок технології виготовлення чутливого елемента гіроскопа, а близькість розташування електродів знімання забезпечується малогабаритністю чутливого елемента. Наприклад, для вібраційної структури у вигляді циліндра діаметром 25 мм максимальна відстань між електродами знімання не більше 2,5 мм. Для мікромеханічних вібраційних структур ця відстань не більше 2-3 мікронів. Суть винаходу пояснюється наступними фігурами: На Фіг.1 представлений приклад вібраційної структури у вигляді кільця з вісьмома рівновіддаленими електродами, що з'єднані в діаметрально протилежні пари й, що утворюють два канали управління й два канали виміру так, що кут між сусідніми електродами становить 45°. На Фіг.2 представлене розташування вібраційної хвилі, пучність (максимуму амплітуди коливань) якої розташована під кутом 22,5° до однієї з пар електродів, позначених для зручності віссю X, а іншої - віссю Y, по яких спрямовані керуючі сили й, на яких виробляються виміри коливань. На Фіг.3 представлена структурна схема із зазначенням блоків, що реалізують операції по пропонованому технічному рішенню. На Фіг.4 представлена різниця частот каналів X і Y при зміні температури в діапазоні від -40 до +50 градусів Цельсія зі швидкістю зміни 1 град./хв. На Фіг.5, графіки а, b, с і d, представлені величини вимірюваної кутової швидкості по кожному з каналів X (графік а) і Y (графік v), результуюча кутова швидкість (графік с) у вигляді піврізниці сигналів каналів X і Y, і амплітуди сигналів управління (графік d) по кожному каналу Ux і Uy, відповідно, при вимірюванні постійної кутової швидкості. На Фіг.6, графіки а, b, с і d, представлені величини вимірюваної кутової швидкості по кожному з каналів X (а) і Y (b), результуюча кутова швидкість (с) у вигляді піврізниці сигналів каналів X і Y, коли температура (графік d) гіроскопа змінюється з невеликої швидкістю. На Фіг.7, графіки а, b, с і d, представлені величини вимірюваної кутової швидкості по кожному з каналів X (а) і Y (b), результуюча кутова швидкість (с) у вигляді піврізниці сигналів каналів X і Y, коли температура (d) гіроскопа змінюється на 90 градусів Цельсія з великою швидкістю 1 град./хв, створюючи більші градієнти температур у гіроскопі. Вібраційна структура, у якій генерується стояча хвиля, шляхом подачі змінної напруги на керуючі електроди 1-5, розташовані по координаті X, представлена на Фіг.1 у вигляді кільця. Вібраційна структура може мати вигляд геометричної фігури, наприклад, циліндра, кільця, півсфери, затисненої балки, камертона та ін., а також структури, отримані методом мікромашинної або інтегральної технології. На Фіг.1 показані також електроди управління 2-6, розташовані по координаті Y, і вимірювальні електроди 3-7,4-8. Електроди можуть бути ємнісного, електромагнітного або п'єзоелектричного типу, також можливе застосування електродів змішаного типу, наприклад, частина 5 95709 електродів може бути ємнісного типу, а інша частина електромагнітного або п'єзоелектричного типів. На електроди управління 1-5 і 2-6 подаються сигнали управління, які встановлюють стоячу вібраційну хвилю посередині між керуючими електродами, тобто під кутом 22.5° до координатної осі X, і, відповідно до Y, як показано на Фіг.2. У випадку обертання вібраційної структури з кутовою швидкістю , результуюча сила Коріоліса Fcоr збуджує додаткову хвилю, пучність якої розташована по напрямку дії сили Fcоr і має рівні, але протилежні за знаком проекції як на напрямок координатної осі X, так і на напрямок осі Y. При цьому, піврізниця сигналів управління, що компенсують поворот стоячої вібраційної хвилі, викликаний дією кутової швидкості обертання, дорівнює вимірюваній кутовій швидкості без погрішностей, що однаково впливають на канали X і Y. До таких погрішностей, насамперед, належать погрішності, пов'язані з не ідеальністю виготовлення вібраційної структури, що приводять до різної жорсткості вібраційної структури по осях X і Y. Ці погрішності, що є присутніми у технічному рішенні, прийнятому за прототип, приводять до різної частоти коливань стоячої хвилі по осях X, Y і збільшують погрішність виміру кутової швидкості, а також зменшують чутливість до вимірюваної кутової швидкості. Крім того, пропоноване технічне рішення виключає погрішність, що виникає через наявність перехресного зв'язку коефіцієнтів демпфування по осях X, Y, що приводить до зсуву нуля і є погрішністю виміру кутової швидкості. Дійсно, рівняння коливань вібраційної структури, після компенсації різночастотності коливань по осях Х, Y (див. Фіг.2), представляються у вигляді: X dxx X 2 X 2k dxy Y Ux ; (1) Y dyy Y 2 Y 2k dyx X Uy ; - власна частота коливань вібраційної структури, по обох осях; dxx , d yy - коефіцієнти демпфірування коливань по осях X, Y, відповідно; d xy , d yx - перехресні коефіцієнти демпфіру вання; k - коефіцієнт Брайана, рівний приблизно 0,4; - вимірювана кутова швидкість; U x , U y - керуючі сигнали по осях Х, Y, відповідно. Керуючі сигнали U x , U y формуються в такий спосіб: U x K x X K f X; (2) U y K y Y K f Y; K x - сигнал на виході регулятора 5 (Фіг.3); K - сигнал на виході регулятора 6 (Фіг.3); K y - сигнал на виході регулятора 5 (Фіг.3). Рішення рівняння (1), з урахуванням виражень (2) дає: 6 1 1 (3) K y K x 2k d xx d yy ; 2 2 Таким чином, піврізниця сигналів K y i K x ви значає вимірювану кутову швидкість без погрішностей, обумовлених різночастотністю коливань по осях Х, Y і виключає погрішність, пов'язану з коефіцієнтами перехресних зв'язків по демпфуванню dxy, dyx. При цьому, різниця коефіцієнтів демпфування dxx i dyy, що визначає зсув нуля гіроскопа для практичних вібраційних структур на кілька порядків менше значення кожного коефіцієнта, dxxdyy
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of angular rate with coriolis vibrational gyroscope
Автори англійськоюChikovani Valerii Valerianovych
Назва патенту російськоюСпособ измерения угловой скорости кориолисовым вибрационным гироскопом
Автори російськоюЧиковани Валерий Валерианович
МПК / Мітки
МПК: G01G 19/02, G01G 19/12, G01C 19/00, G01P 9/00
Мітки: коріолісовим, спосіб, кутової, гіроскопом, вібраційним, швидкості, виміру
Код посилання
<a href="https://ua.patents.su/8-95709-sposib-vimiru-kutovo-shvidkosti-koriolisovim-vibracijjnim-giroskopom.html" target="_blank" rel="follow" title="База патентів України">Спосіб виміру кутової швидкості коріолісовим вібраційним гіроскопом</a>
Спосіб вимірювання кутової швидкості коріолісовим вібраційним гіроскопом
Номер патенту: 73632
Опубліковано: 15.08.2005
Автори: Яценко Юрій Олексійович, Чіковані Валерій Валеріанович, Коваленко Володимир Анатолійович
МПК: G01P 9/00
Мітки: коріолісовим, вимірювання, спосіб, вібраційним, швидкості, гіроскопом, кутової
Формула / Реферат:
1. Спосіб вимірювання кутової швидкості вібраційним гіроскопом шляхом генерування основної вібраційної хвилі, яка формує опорний сигнал на частоті, близькій або рівній одній з безлічі резонансних мод вібраційної структури, яка містить електроди збудження, електроди управління та інформативні електроди і обертання навколо осі симетрії якої збуджує додаткову вібраційну хвилю, амплітуда якої пропорційна кутовій швидкості обертання або...
Спосіб гасіння початкової кутової швидкості космічного літального апарата

Номер патенту: 46217
Опубліковано: 10.12.2009
Автори: Ковальчук Михайло Юрійович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: початкової, космічного, швидкості, апарата, літального, кутової, гасіння, спосіб
Формула / Реферат:
Спосіб гасіння початкової кутової швидкості космічного літального апарата, що полягає в тому, що вимірюють початкову кутову швидкість космічного літального апарату, формують керуючий сигнал, створюють керуючий момент за допомогою релейних виконавчих органів і вимикають керуючий сигнал, коли кутова швидкість приймає задане значення, який відрізняється тим, що після вимірювання початкової кутової швидкості знаходять величину імпульсу післядії...
Спосіб гасіння початкової кутової швидкості космічного літального апарата

Номер патенту: 53693
Опубліковано: 11.10.2010
Автори: Бандура Іван Миколайович, Медведєв Валентин Миколайович
МПК: B64G 1/24
Мітки: космічного, початкової, кутової, гасіння, апарата, швидкості, спосіб, літального
Формула / Реферат:
Спосіб гасіння початкової кутової швидкості космічного літального апарата, який полягає в тому, що вимірюють початкову кутову швидкість космічного літального апарата, формують керуючий сигнал, створюють керуючий момент за допомогою релейних виконавчих органів, який відрізняється тим, що після виміру початкової кутової швидкості визначають розмір і знак збурюючого моменту, що діє на космічний літальний апарат, керуючий момент, створений за...
Система гасіння початкової кутової швидкості космічного літального апарата
Номер патенту: 45064
Опубліковано: 26.10.2009
Автори: Бандура Іван Миколайович, Педе Тетяна Юріївна, Кулік Анатолій Степанович
МПК: B64G 1/24
Мітки: система, швидкості, початкової, апарата, космічного, літального, кутової, гасіння
Формула / Реферат:
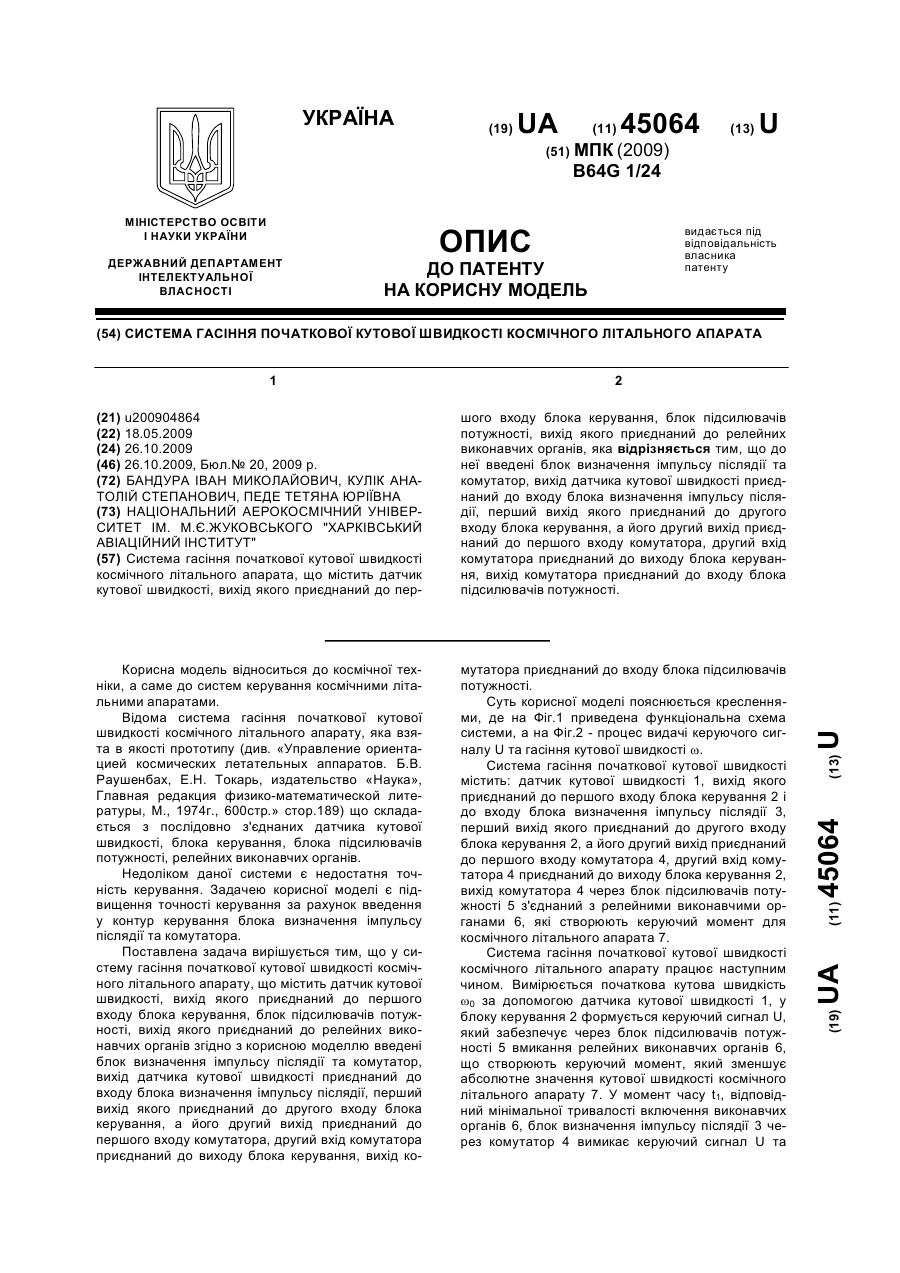
Система гасіння початкової кутової швидкості космічного літального апарата, що містить датчик кутової швидкості, вихід якого приєднаний до першого входу блока керування, блок підсилювачів потужності, вихід якого приєднаний до релейних виконавчих органів, яка відрізняється тим, що до неї введені блок визначення імпульсу післядії та комутатор, вихід датчика кутової швидкості приєднаний до входу блока визначення імпульсу післядії, перший вихід...
Вимірювач кутової швидкості

Номер патенту: 11983
Опубліковано: 16.01.2006
Автори: Зінченко Юрій Володимирович, Гордін Олександр Григорович
МПК: G01P 3/64, G01R 33/02, G01P 3/00
Мітки: вимірювач, швидкості, кутової
Формула / Реферат:
1. Вимірювач кутової швидкості, який містить датчики переміщення та електродвигун, на валу якого знаходиться плоский дископодібний ротор, який відрізняється тим, що плоский дископодібний ротор складається з окремих радіально розташованих сегментів.2. Вимірювач кутової швидкості за п. 1, який відрізняється тим, що як датчики переміщення використано датчики магнітного потоку трансформаторного типу.
Попередній патент: Пристрій для рефлексотерапії
Наступний патент: Спосіб форсованої гри в шахи
Випадковий патент: Моноблочна гнучка асферична інтраокулярна лінза sl-907 "centri x dz"