Спосіб гірокомпасування по сигналу гіроскопічного датчика кутової швидкості
Номер патенту: 74397
Опубліковано: 25.10.2012
Автори: Нужний Олександр Володимирович, Мелешко Владислав Валентинович
Формула / Реферат
Спосіб гірокомпасування по сигналу гіроскопічного датчика кутової швидкості, який полягає в тому, що сигнал гіроскопічного датчика кутової швидкості, встановленого на гіроплатформі, надходить на обчислювальний блок, де формується момент корекції, що подається на двигун стабілізації, який повертає платформу, доки вимірювана гіроскопічним датчиком кутової швидкості східна складова швидкості обертання Землі не стане рівною нулю; корекція положення платформи відносно горизонту відбувається за допомогою сигналів акселерометрів, установлених на платформі, який відрізняється тим, що по сигналах трьох однокомпонентних акселерометрів, установлених на корпусі приладу, визначаються значення прискорень хитавиці, діючих на об'єкт ![]() ,
, ![]() ,
, ![]() , за допомогою яких та кутів нахилу основи
, за допомогою яких та кутів нахилу основи ![]() ,
, ![]() ,
, ![]() , визначених по датчиках кутів, установлених на кардановому підвісі гіроплатформи, обраховуються складові діючих на платформу прискорень, викликаних хитавицею:
, визначених по датчиках кутів, установлених на кардановому підвісі гіроплатформи, обраховуються складові діючих на платформу прискорень, викликаних хитавицею:
![]() ,
,
![]() ,
,
та компенсуються в сигналах акселерометрів, установлених на платформі.
Текст
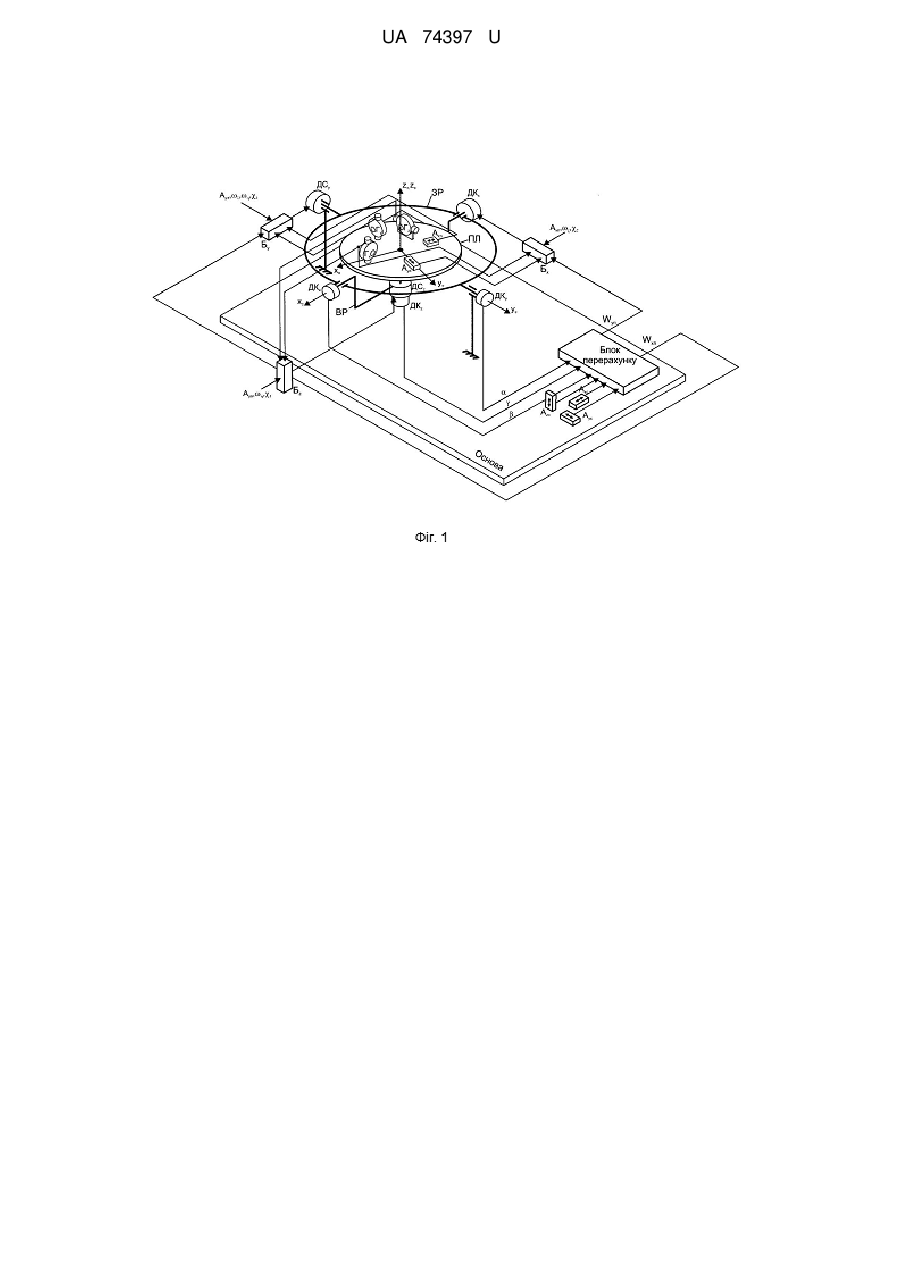
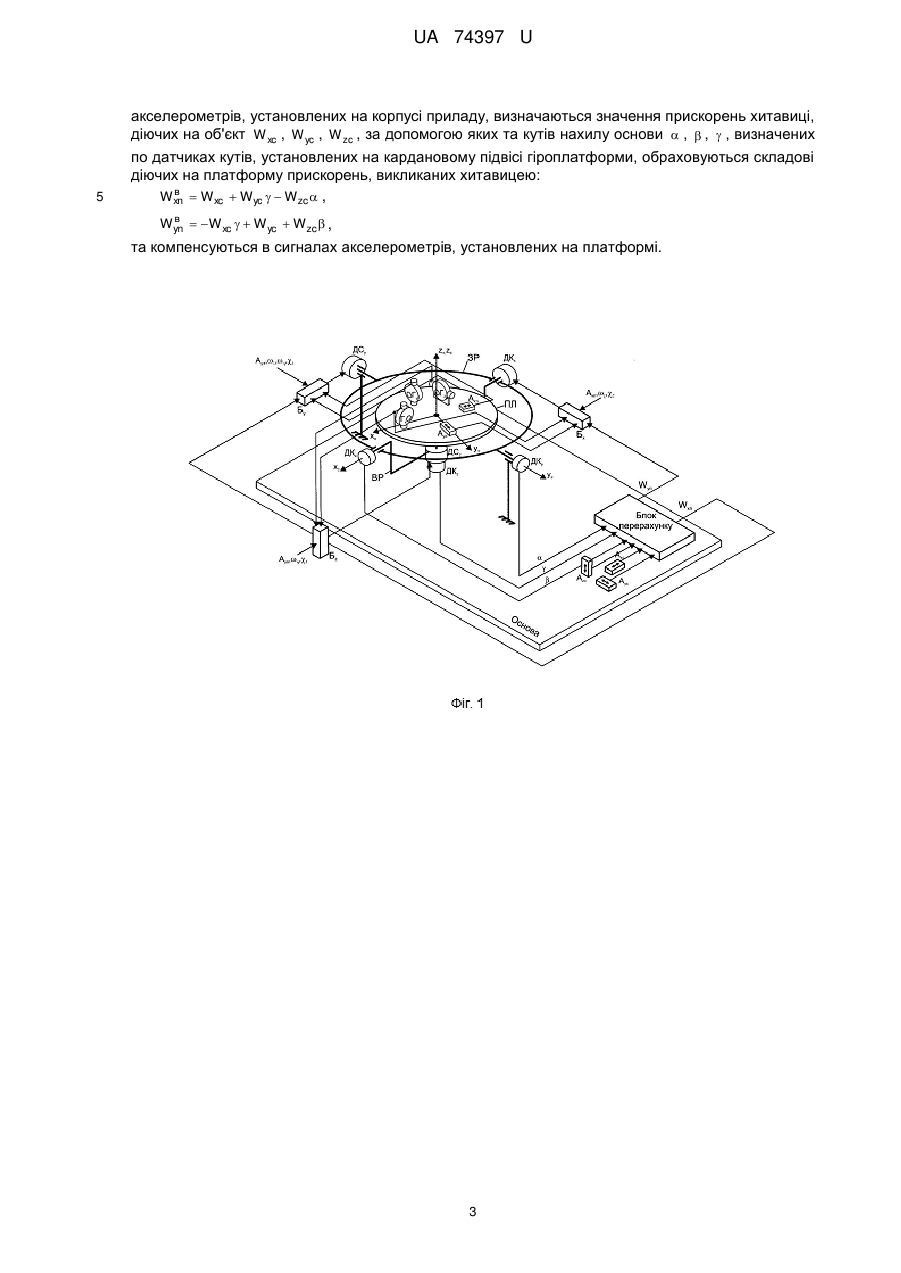
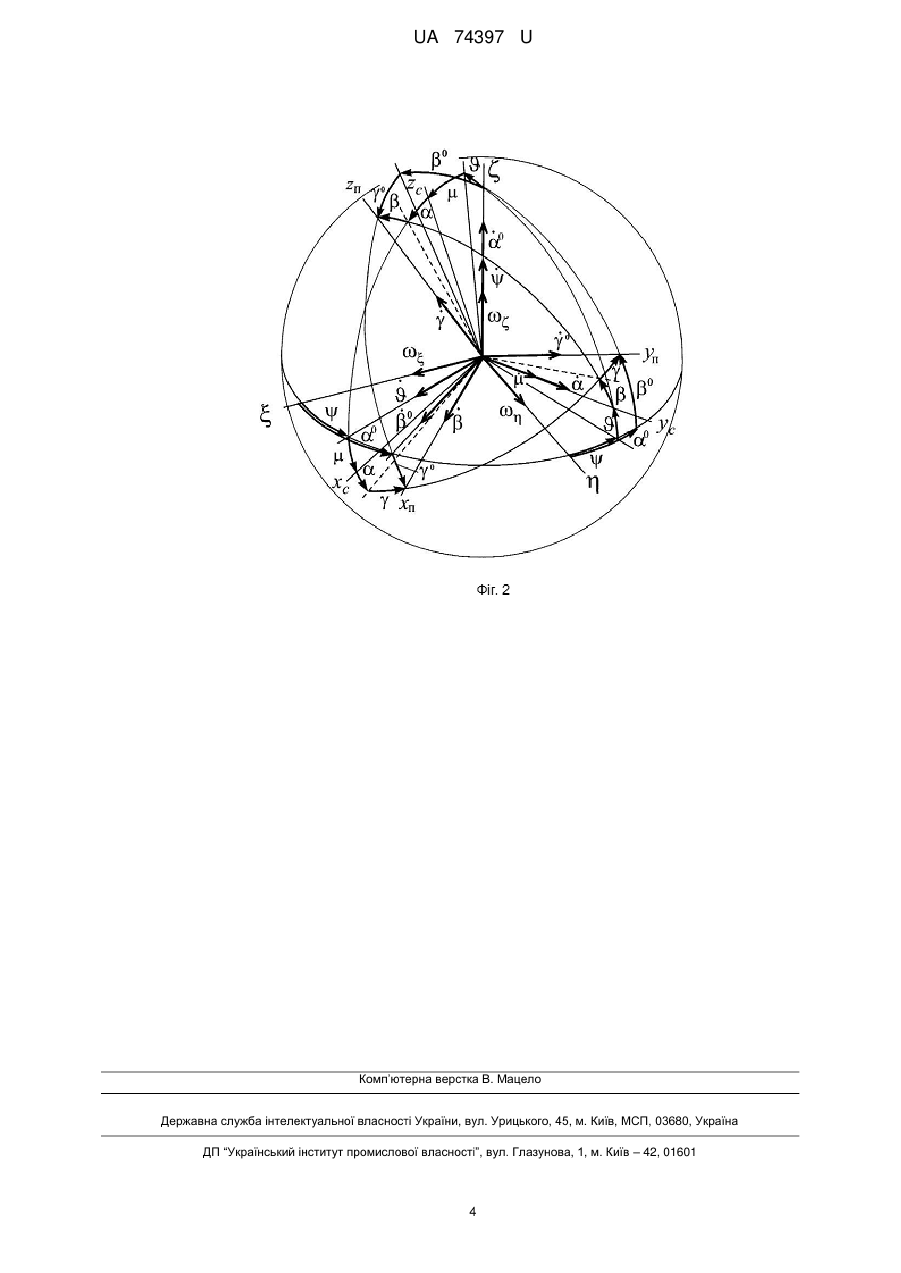
Реферат: Спосіб гірокомпасування по сигналу гіроскопічного датчика кутової швидкості, який полягає в тому, що сигнал гіроскопічного датчика кутової швидкості, встановленого на гіроплатформі, надходить на обчислювальний блок, де формується момент корекції, що подається на двигун стабілізації, який повертає платформу, доки вимірювана гіроскопічним датчиком кутової швидкості східна складова швидкості обертання Землі не стане рівною нулю; корекція положення платформи відносно горизонту відбувається за допомогою сигналів акселерометрів, установлених на платформі; причому по сигналах трьох однокомпонентних акселерометрів, установлених на корпусі приладу, визначаються значення прискорень хитавиці, діючих на об'єкт W xc , W yc , W zc , за допомогою яких та кутів нахилу основи , , , визначених по датчиках кутів, установлених на кардановому підвісі гіроплатформи, обраховуються складові діючих на платформу прискорень, викликаних хитавицею, та компенсуються в сигналах акселерометрів, установлених на платформі. UA 74397 U (54) СПОСІБ ГІРОКОМПАСУВАННЯ ПО СИГНАЛУ ГІРОСКОПІЧНОГО ДАТЧИКА КУТОВОЇ ШВИДКОСТІ UA 74397 U UA 74397 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель відноситься до навігаційного приладобудування і може бути використана для гірокомпасування інерціальних навігаційних систем, гіростабілізаторів, для створення гірокомпасів та курсовказуючих приладів. Метою винаходу є підвищення точності та зменшення часу гірокомпасування в умовах впливу хитавиці на об'єкт, на якому проводиться гірокомпасування. Відомий спосіб аналітичного гірокомпасування з допомогою гіроскопічного датчика кутової швидкості [2], згідно з яким курсовий напрямок горизонтально розташованої вимірювальної вісі гіроскопа на нерухомому об'єкті визначають аналітично з використанням результатів показань гіроскопу, отриманих на різних азимутальних кутах. Відомий спосіб фізичного гірокомпасування гіроплатформи з використанням вихідного сигналу гіроскопічного датчика кутової швидкості [3], згідно з яким проводиться гірокомпасування гіроплатформи і, відповідно, головної вісі гіроскопічного датчика кутової швидкості до площину меридіану, доки напрямок кінетичного моменту гіроскопа співпаде з горизонтальною складовою кутової швидкості обертання Землі. Найближчим аналогом даного винаходу являється "Способ гирокомпасирования трехосного гиростабилизатора" [5]. Цей спосіб гірокомпасування заключається в тому, що в початковому положенні при допомозі двох горизонтальних акселерометрів вісі чутливості двох горизонтальних гіроскопів горизонтують разом з гіроплатформою, на якій вони установлені, а вісь чутливості вертикального гіроскопа встановлюють в вертикальне положення, після чого гіроплатформу переключають в режим гірокомпаса шляхом формування моменту корекції, пропорційного куту відхилення гіроплатформи від площини горизонту. Недоліком даного способу являється виникнення суттєвих похибок та значне збільшення часу гірокомпасування при проведенні початкової виставки на об'єкті, підверженому хитавиці, за рахунок впливу прискорень хитавиці на акселерометри, встановлені на гіроплатформі. Сутність пропонуємого способу гірокомпасування може бути пояснена з допомогою принципіальної схеми, яка представлена на фіг. 1. На фіг. 1 позначення мають наступне значення: ПЛ - гіроплатформа, ВР - внутрішня рамка карданового підвісу, ЗР - зовнішня рамка карданового підвісу, ДСх, ДСу, ДСz - двигуни стабілізації, ДКх, ДКу, ДКz - датчики кутів, які використовуються для зняття інформації про кути нахилу об'єкта, Ахn, Ауn - однокомпонентні акселерометри, встановлені на гіроплатформі, відповідно по вісям хn та уn, що використовуються для горизонтування гіро-платформи та демпфування коливань під час проведення гірокомпасування, Ахс, Аус, Аzc - однокомпонентні акселерометри, встановлені на об'єкті, відповідно по осям х с, ус, zc, що використовуються для компенсації хитавиці об'єкту. Гх, Гу, Гz - гіроскопічні датчики кутової швидкості, які використовуються як індикаторні чутливі елементи в схемі індикаторної гіростабілізації гіроплатформи, сигнал гіроскопа Гх використовується для проведення гірокомпасування, Бх, Бу, Бz - обчислювальні блоки, використовуються для створення сумарного сигналу керування. На фіг.2 показана взаємна орієнтація систем координат гіроплатформи та об'єкта відносно географічної системи координат, що визначається кутами: - кут рискання, - кут крену, кут тангажу, - кут відхилення гіроплатформи від повздовжньої вісі об'єкта, , - кути нахилу гіроплатформи відносно об'єкта (кути відхилення об'єкту від площини горизонту), - кут відхилення гіроплатформи від напрямку на північ, , - кути відхилення гіроплатформи від горизонту. В процесі гірокомпасування для орієнтування гіроплатформи відносно площини меридіану використовується сигнал гіроскопічного датчика кутової швидкості Гх. Сигнал надходить на обчислювальний блок Bz, де обчислюється загальний момент корекції та подається на двигун стабілізації ДСz, який обертає гіроплатформу. Орієнтування проводиться до тих пір, доки вимірювана гіроскопічним датчиком кутової швидкості Гх східна складова швидкості обертання Землі не стане рівною нулю. В процесі гірокомпасування відбувається корекція положення гіроплатформи відносно горизонту за допомогою сигналів акселерометрів А хn, Ауn та сигналів стабілізації гіроскопічних датчиків кутової швидкості Гу, Гz, які надходять на обчислювальні блоки Бх, Бу і після перерахунку надходять на двигуни стабілізації ДСх, ДСу. При хитавиці об'єкту на акселерометри А хn, Ауn діють прискорення хитавиці, тобто хитавиця впливає на процес корекції положення гіроплатформи, що приводить до виникнення похибок 1 UA 74397 U 5 гірокомпасування. Для усунення цього впливу використовуються три додаткових однокомпонентних акселерометри Ахс, Аус, Azc, які установлюються на корпусі приладу. Сигнали цих акселерометрів надходять разом з сигналами датчиків кутів ДКх, ДКу, ДКz до блоку перерахунку, де обчислюється значення прискорень хитавиці, діючих на акселерометри А хn, Ауn. Ці значення надходять на обчислювальні блоки Бх, Бу та компенсують складову сигналу акселерометрів Ахn, Ауn, викликану хитавицею об'єкту. Швидкості корекції, які обраховуються в обчислювальних блоках Бx, Бу, Бz, мають значення: в Wyn Wyn k 2 yn x gn 10 в n Wxn Wxn xn dх gn в в W Wyn W Wxn n n yn k 3 xn xn y yn dy gn gn в Wyn Wyn n k 1 dx n yn z dz gn де: 1 , 2 , 3 - коефіцієнти передачі горизонтального та азимутального каналу корекції, xn , yn - похибки акселерометрів Ахn, Ауn, 15 dx , dy , dz - кутові швидкості дрейфу гіроскопічних датчиків кутових швидкостей Гх, Гу, Гz, n , n - обраховані значенні проекцій кутових швидкостей обертання Землі, вводяться для 20 компенсації переносного руху гіроплатформи, gn - приладне значення прискорення вільного падіння, W xn , W yn - складові сигналу акселерометрів А хn, Ауn, викликані хитавицею об'єкта, в в W xn , W yn - вирахувані значення прискорень хитавиці об'єкта, що діють на акселерометри Ахn, Ауn. в в Значення прискорень W xn , W yn обчислюються в блоці перерахунку за залежністю: 25 в Wxn Wxc W yc Wzc в W yn W xc W yc Wzc , 30 35 де значення прискорень W xc , W yc , W zc визначаються із сигналів акселерометрів Ахс, Аус, Azc, а значення кутів нахилу об'єкта , , визначається за допомогою датчиків кутів ДКх, ДКу, ДКz. Джерела інформації: 1. Мелешко В.В. Инерциальные навигационные системы. Начальная выставка. - К.: "Корнийчук", 1999.-123с. 2. Назаров Б.И., Хлебников Г.А. Гиростабилизаторы ракет, 1975.-215с. 3. Репников А.В., Сачков Г.П., Черноморский А. И. Гироскопические системы -М.: машиностроение, 1983.-319с. 4. Titterton D., Weston J., Starpdown Inertial Navigation Tehnology-2nd Edition, Institution of Elecrical Engineers, UK, 2004.-558p. 5. Патент 2131585 РФ МПК G01С19/44 "Способ гирокомпасирования трехосного гиростабилизатора" Рыбаков В. И. дата публикации: 10.06.1999 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Спосіб гірокомпасування по сигналу гіроскопічного датчика кутової швидкості, який полягає в тому, що сигнал гіроскопічного датчика кутової швидкості, встановленого на гіроплатформі, надходить на обчислювальний блок, де формується момент корекції, що подається на двигун стабілізації, який повертає платформу, доки вимірювана гіроскопічним датчиком кутової швидкості східна складова швидкості обертання Землі не стане рівною нулю; корекція положення платформи відносно горизонту відбувається за допомогою сигналів акселерометрів, установлених на платформі, який відрізняється тим, що по сигналах трьох однокомпонентних 2 UA 74397 U акселерометрів, установлених на корпусі приладу, визначаються значення прискорень хитавиці, діючих на об'єкт W xc , W yc , W zc , за допомогою яких та кутів нахилу основи , , , визначених 5 по датчиках кутів, установлених на кардановому підвісі гіроплатформи, обраховуються складові діючих на платформу прискорень, викликаних хитавицею: в Wxn Wxc W yc Wzc , в W yn W xc W yc Wzc , та компенсуються в сигналах акселерометрів, установлених на платформі. 3 UA 74397 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for gyro-compassing by rate gyro signal
Автори англійськоюMeleshko Vladyslav Valentynovych, Nuzhnyi Oleksandr Volodymyrovych
Назва патенту російськоюСпособ гирокомпасирования по сигналу гироскопического датчика угловой скорости
Автори російськоюМелешко Владислав Валентинович, Нужный Александр Владимирович
МПК / Мітки
МПК: G01C 21/00
Мітки: кутової, швидкості, датчика, гіроскопічного, гірокомпасування, спосіб, сигналу
Код посилання
<a href="https://ua.patents.su/6-74397-sposib-girokompasuvannya-po-signalu-giroskopichnogo-datchika-kutovo-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб гірокомпасування по сигналу гіроскопічного датчика кутової швидкості</a>
Спосіб визначення порога чутливості гіроскопічного датчика кутової швидкості
Номер патенту: 16265
Опубліковано: 29.08.1997
Автори: Анупрієнко Генадій Єфремович, Кузьменко Юрій Михайлович, Карпачов Юрій Андрійович, Павловський Михайло Антонович, Маросін Олег Петрович, Рудик Юрій Микитович, Єрмаков Сергій Миколайович
МПК: G01C 19/00
Мітки: визначення, швидкості, чутливості, спосіб, кутової, датчика, порога, гіроскопічного
Формула / Реферат:
Способ определения порога чувствительности гироскопического датчика угловой скорости (ГДУС), включающий задание монотонно возрастающего входного сигнала путем приложения управляющего момента по выходной оси ГДУС и определение порога чувствительности по изменению выходного сигнала ГДУС, отличающийся тем, что, с целью повышения точности определения порога чувствительности ГДУС, формируют монотонно возрастающий входной сигнал путем...
Спосіб та пристрій для вимірювання кутової швидкості
Номер патенту: 61044
Опубліковано: 15.10.2003
Автори: Мурзаханов Олександр Валентинович, Леоненко Костянтин Миколайович, Шервашидзе Володимир Варламович
МПК: G01P 9/00
Мітки: пристрій, спосіб, вимірювання, швидкості, кутової
Формула / Реферат:
1. Спосіб для вимірювання кутової швидкості (), який полягає у тому, що подають керуючий сигнал на блок живлення гіроскопічного датчика кутової швидкості для подачі напруги, необхідної для розкручування гіромотора до його виходу на стаціонарний режим обертання, на виході датчика вимірюють величину напруги при даному напрямку обертання ротора гіромотора (U+), подають...
Спосіб гасіння початкової кутової швидкості космічного літального апарата

Номер патенту: 46217
Опубліковано: 10.12.2009
Автори: Бандура Іван Миколайович, Ковальчук Михайло Юрійович
МПК: B64G 1/24
Мітки: швидкості, апарата, космічного, початкової, гасіння, спосіб, кутової, літального
Формула / Реферат:
Спосіб гасіння початкової кутової швидкості космічного літального апарата, що полягає в тому, що вимірюють початкову кутову швидкість космічного літального апарату, формують керуючий сигнал, створюють керуючий момент за допомогою релейних виконавчих органів і вимикають керуючий сигнал, коли кутова швидкість приймає задане значення, який відрізняється тим, що після вимірювання початкової кутової швидкості знаходять величину імпульсу післядії...
Система гасіння початкової кутової швидкості космічного літального апарата
Номер патенту: 45064
Опубліковано: 26.10.2009
Автори: Педе Тетяна Юріївна, Бандура Іван Миколайович, Кулік Анатолій Степанович
МПК: B64G 1/24
Мітки: початкової, гасіння, швидкості, космічного, літального, система, кутової, апарата
Формула / Реферат:
Система гасіння початкової кутової швидкості космічного літального апарата, що містить датчик кутової швидкості, вихід якого приєднаний до першого входу блока керування, блок підсилювачів потужності, вихід якого приєднаний до релейних виконавчих органів, яка відрізняється тим, що до неї введені блок визначення імпульсу післядії та комутатор, вихід датчика кутової швидкості приєднаний до входу блока визначення імпульсу післядії, перший вихід...
Адаптивна система демпфірування початкової кутової швидкості космічного літального апарата

Номер патенту: 53727
Опубліковано: 11.10.2010
Автори: Богатюк Ольга Анатоліївна, Бандура Іван Миколайович, Кулік Анатолій Степанович
МПК: B64G 1/24
Мітки: кутової, система, літального, демпфірування, адаптивна, апарата, космічного, швидкості, початкової
Формула / Реферат:
Адаптивна система демпфірування початкової кутової швидкості космічного літального апарата, що містить датчик кутової швидкості, вихід якого приєднаний до першого входу блока керування, вихід якого через блок підсилювачів потужності з'єднаний з релейними виконавчими органами, яка відрізняється тим, що в неї введений блок визначення збурюючого моменту, вхід якого з'єднаний з виходом датчика кутової швидкості, а його вихід з'єднаний з другим...
Попередній патент: Пристрій для контролю вологості
Наступний патент: Пестицидна композиція
Випадковий патент: Спосіб прогнозування зрощення перелому