Цифровий стабілізатор рухомого об’єкта
Номер патенту: 102634
Опубліковано: 10.11.2015
Автори: Цисарж Вячеслав Вікторович, Маркус Володимир Семенович, Очаговський Станіслав Янович, Піронер Ян Михайлович
Формула / Реферат
Цифровий стабілізатор рухомого об'єкта, що містить вимірювальний пристрій, підсилювачі горизонтального та вертикального наведення, електродвигуни з редукторами горизонтального та вертикального наведення, при тому, що кожний з підсилювачів містить контролер та вихідний каскад, при цьому підсилювачі горизонтального та вертикального наведення, електродвигуни з механізмами горизонтального та вертикального наведення розміщені у башті машини-носія, який відрізняється тим, що до складу цифрового стабілізатора додатково введені процесор, пульт стабілізації та наведення, горизонтальний привод, вертикальний привод, датчик кута азимута, датчик кута місця, вимірювальний пристрій виконано у вигляді інерціального вимірювального пристрою, що містить вимірювальний модуль, обчислювач даних та блок калібрування, причому вимірювальний блок містить трикоординатний вимірювач магнітного курсу, твердотільний трикоординатний акселерометр та трикоординатний гіроскопічний датчик кутових швидкостей, зібрані у єдиному блоці, до складу обчислювача даних входять суматори, інтегратор рівнянь орієнтації, обчислювач поправок та обчислювач кінцевих кутів орієнтації, пульт стабілізації та наведення містить панель органів керування, маніпулятори горизонтального та вертикального наведення та виконані на основі датчиків відхилення, причому панель органів керування та маніпулятори горизонтального і вертикального наведення додатково містять кнопки та тумблери керування системою керування, маніпулятори горизонтального та вертикального наведення виконані з незалежним один від одного керуванням, до складу горизонтального приводу внесені електромагніт стопора горизонтального привода, електродвигун горизонтального привода з механізмом повороту, до складу вертикального приводу внесені електромагніт стопора вертикального привода, електродвигун вертикального привода з механізмом підйому, при тому, що горизонтальний та вертикальний приводи виконані за аналогічною схемою, датчик кута азимута та датчик кута місця виконані на основі цифрових датчиків відхилення, причому у загальному вигляді елементи цифрового стабілізатора зв'язані між собою двосторонніми багатоканальними електричними зв'язками, а саме, виходи інерціального вимірювального пристрою з'єднані з першим входом процесора, виходи пульта стабілізації та наведення двостороннім зв'язком зв'язані з другим входом-виходом процесора, до третього входу процесора надходить сигнал з датчика кута підйому, четвертий та п'ятий входи-виходи процесора двостороннім зв'язком зв'язані з входами-виходами, відповідно, підсилювача горизонтального приводу та підсилювача вертикального приводу, вертикальний привод зв'язаний механічним зв'язком з датчиком кута підйому та механічним зв'язком з об'єктом вертикальної стабілізації, горизонтальний привод зв'язаний механічним зв'язком з датчиком кута повороту та механічним зв'язком з об'єктом горизонтальної стабілізації, при чому, що інерціальний вимірювальний пристрій та пульт стабілізації та наведення можуть бути розміщені у будь-якому місці машини-носія на відстані від осі обертання.
Текст
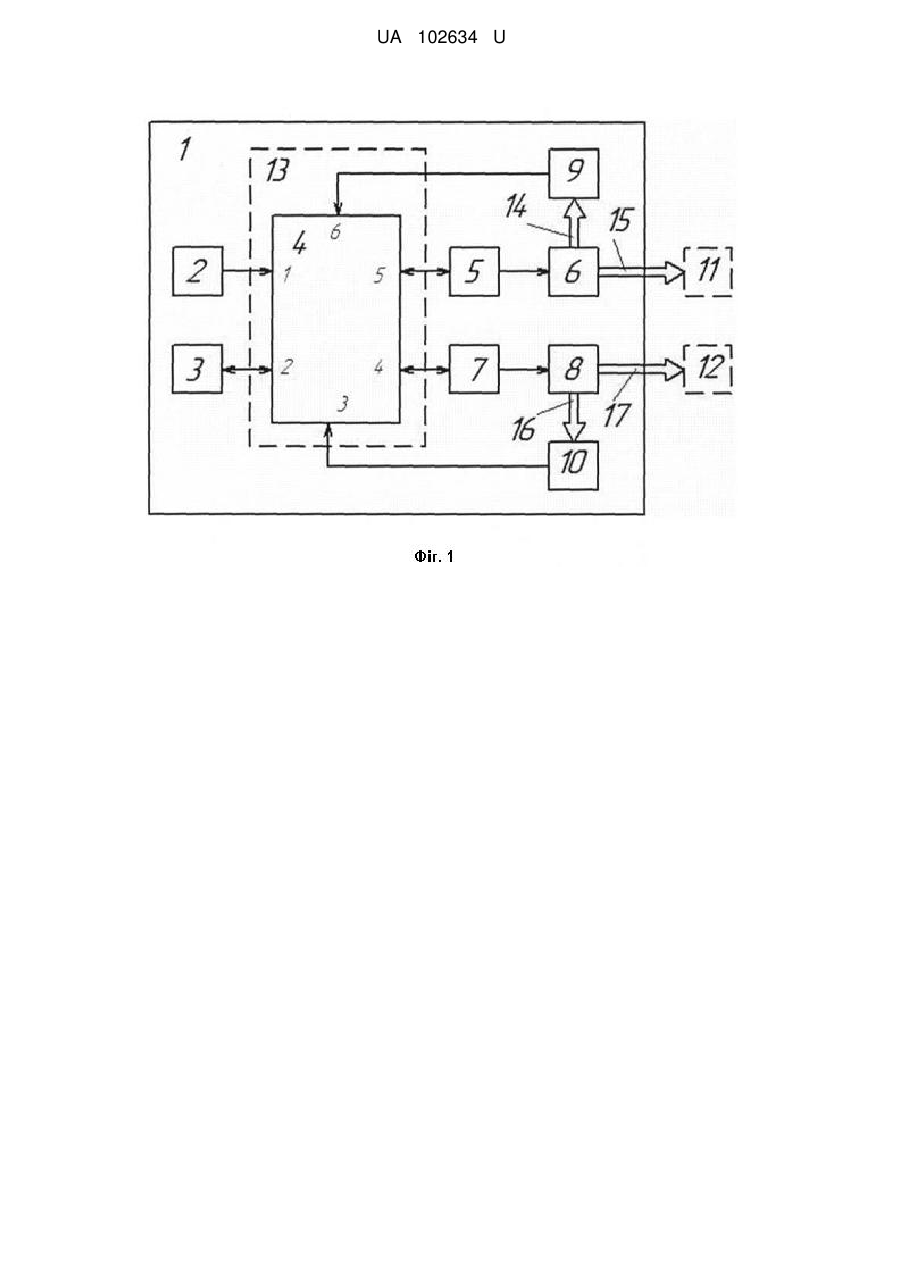
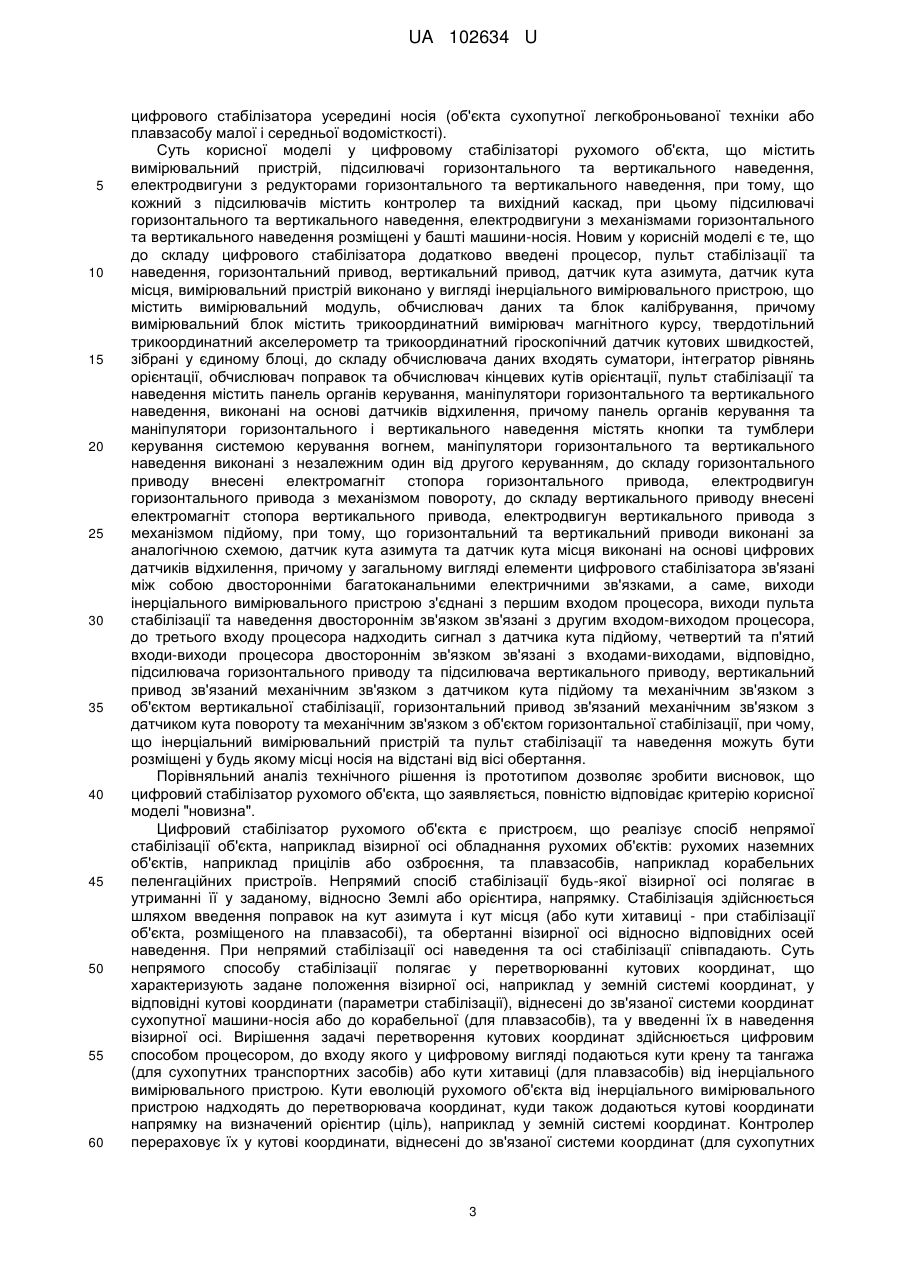
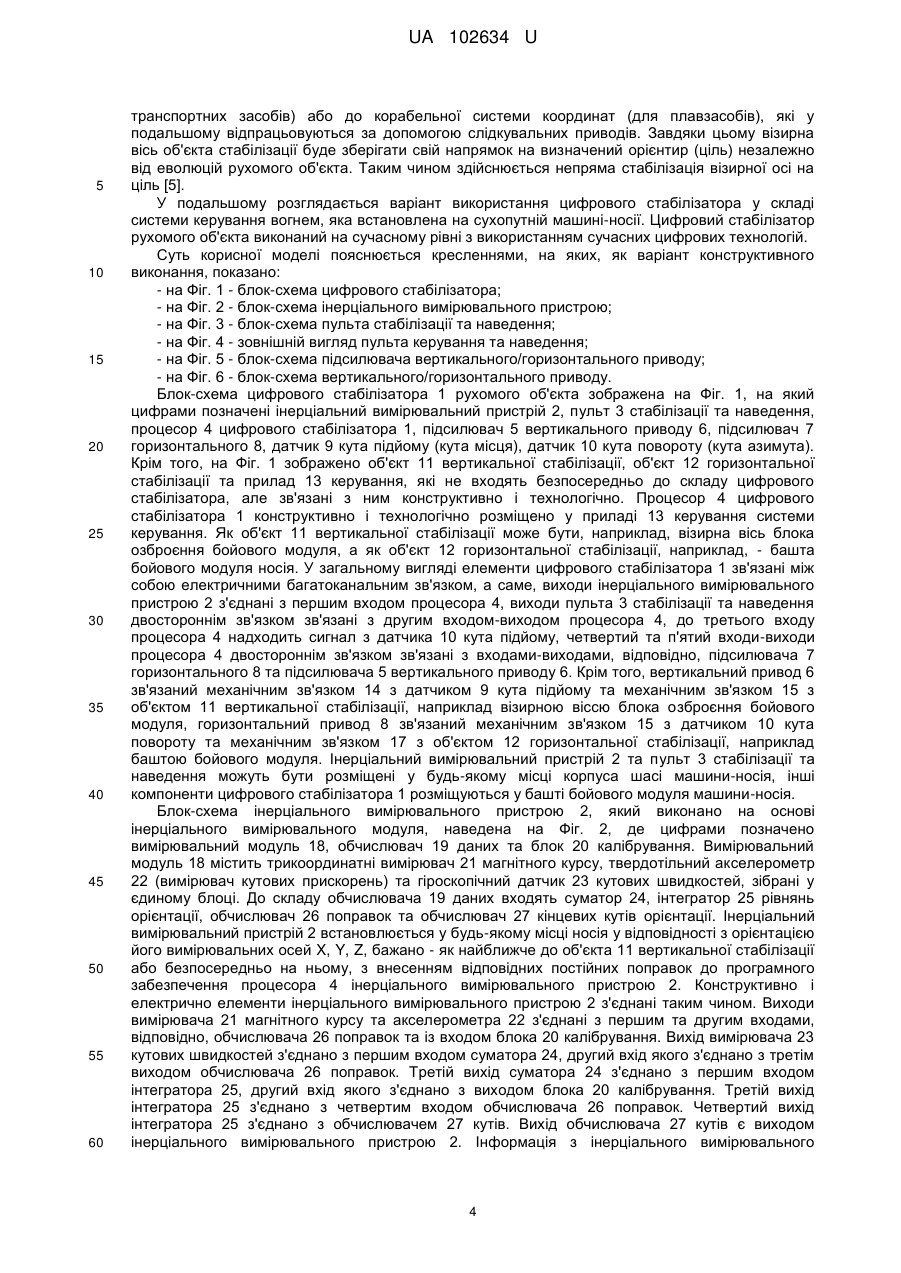
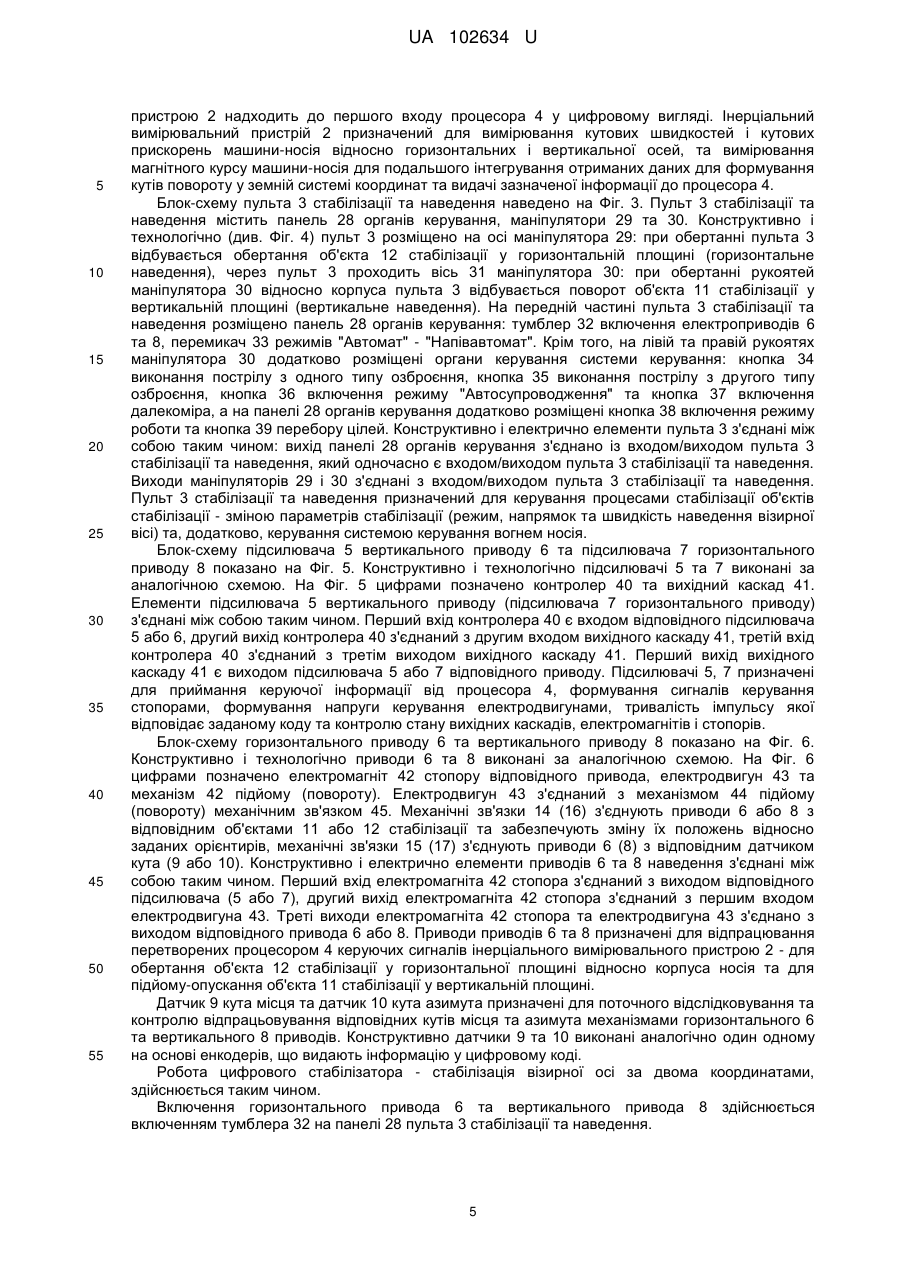
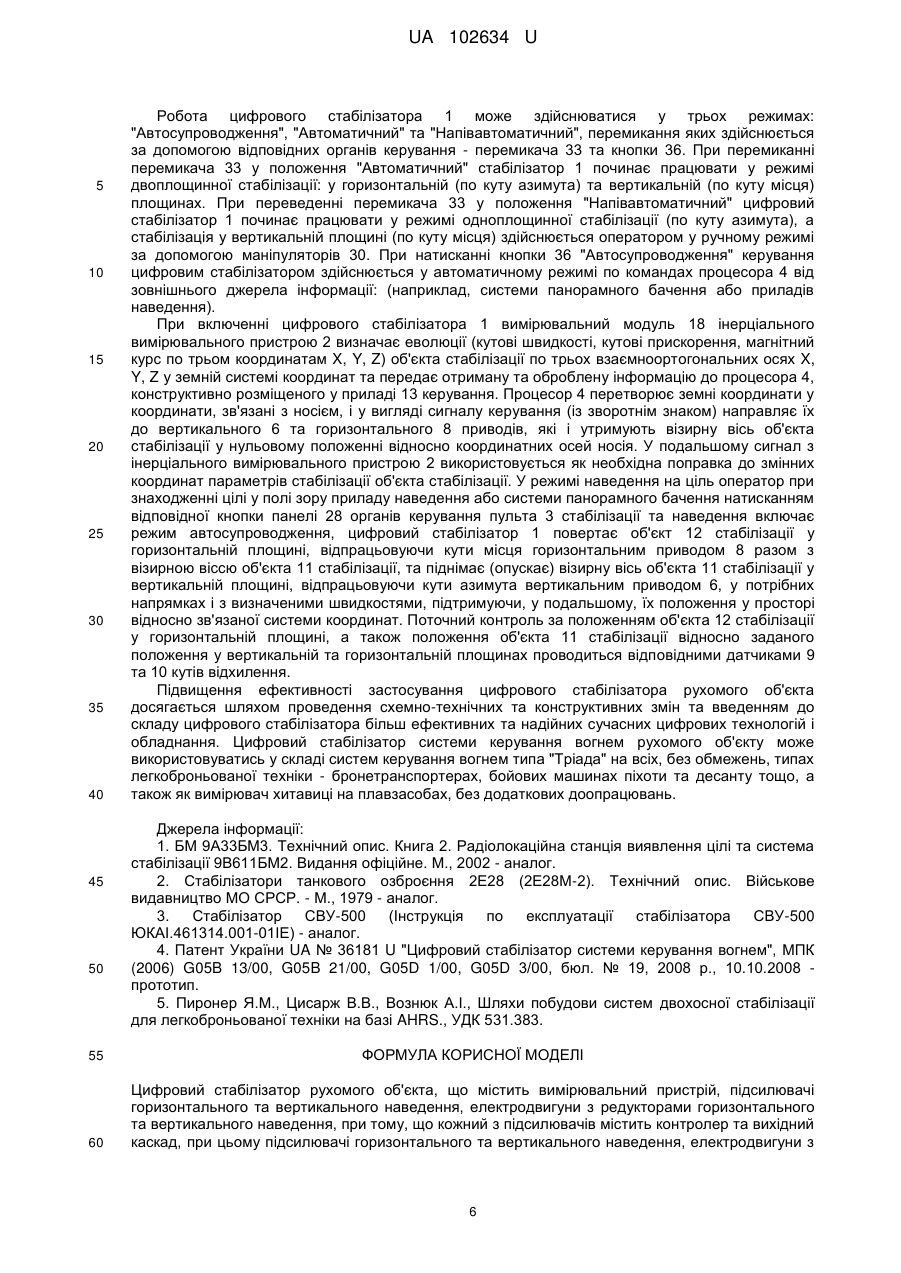
Реферат: Цифровий стабілізатор рухомого об'єкта, що містить вимірювальний пристрій, підсилювачі горизонтального та вертикального наведення, електродвигуни з редукторами горизонтального та вертикального наведення, при тому, що кожний з підсилювачів містить контролер та вихідний каскад, при цьому підсилювачі горизонтального та вертикального наведення, електродвигуни з механізмами горизонтального та вертикального наведення розміщені у башті машини-носія. До складу цифрового стабілізатора додатково введені процесор, пульт стабілізації та наведення, горизонтальний привод, вертикальний привод, датчик кута азимута, датчик кута місця, вимірювальний пристрій виконано у вигляді інерціального вимірювального пристрою, що містить вимірювальний модуль, обчислювач даних та блок калібрування. UA 102634 U (12) UA 102634 U UA 102634 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі автоматичного регулювання процесів, зокрема до пристроїв автоматичного керування об'єктами і систем стабілізації озброєння, а саме - до цифрових стабілізаторів систем керування вогнем легкоброньованої техніки та плавзасобах малої і середньої водомісткості. Відомий стабілізатор системи керування радіолокаційної антени, який містить гіроазимут, гіровертикаль, датчики положення осі антени у горизонтальній та вертикальній площинах, перетворювач координат, станцію підсилювання, два гідронасоси, гідродвигун, гідроциліндр, датчики зворотного зв'язку, датчики похідного положення та пульт керування [1]. Недоліками відомого стабілізатора системи керування радіолокаційної антени є те, що він не забезпечує чіткої стабілізації осі візування та осі прицілювання при стрільбі з різного типу озброєння по рухомих цілях. Наявність у складі гідравлічного обладнання зменшує швидкодію відомого стабілізатора, використання його у складі системи керування вогнем можливе лише для попереднього наведення, а не прицілювання озброєння. Відомий стабілізатор танкового озброєння, який містить гіроблок горизонтального та вертикального площин з двома гіротахометрами горизонтального і вертикального наведення та датчиком кута привода горизонтального наведення, гідропідсилювач, електронні підсилювачі горизонтального та вертикального наведення, компенсатор, датчик лінійних прискорень, прилад наведення, обмежувач кутів, виконавчі гідроциліндри, насос з електромагнітами та електродвигуном, два поповнюючі баки для горизонтального та вертикального наведення, та гідромотор великого моменту [2]. Недоліками відомого танкового стабілізатора є, перш за все, наявність гідравлічного обладнання у складі стабілізатора. Гіроблок з гіроскопічними приладами встановлюється на пружні амортизатори, що додає похибки прицілювання. Значна загальна маса, габаритні розміри та досить велика потужність виконавчих органів - гідроциліндрів, роблять відомий танковий стабілізатор непридатним для використання у складі легкоброньованої техніки та плавзасобах малої водомісткості. Відомий цифровий стабілізатор системи керування вогнем, який містить пульт керування командира, блок керування, підсилювач горизонтального наведення та підсилювач вертикального наведення, електродвигун горизонтального наведення та електродвигун вертикального наведення, з'єднані між собою взаємними зв'язками, при цьому зазначений цифровий стабілізатор системи керування вогнем встановлений у башті броньованого об'єкта техніки [3]. Недоліками відомого цифрового стабілізатора системи керування вогнем є те, що він не забезпечує високої точності наведення озброєння на рухому ціль. Як датчики положення використовуються гіроскопічні датчики кутової швидкості, робота яких пов'язана з додатковими пристроями електроживлення. Крім того, відомий цифровий стабілізатор не є, у повній мірі, цифровим - вихідний сигнал датчиків кутової швидкості є аналоговим та потребує додаткового обладнання, наприклад аналого-цифрового перетворювача, що погіршує його експлуатаційні показники. Найбільш близьким технічним рішенням як по суті, так і по результатах, що досягаються, та яке прийнято за найближчий аналог (прототип), є цифровий стабілізатор системи керування вогнем, що містить пульт керування командира, пульт керування оператора, блок керування, підсилювач вертикального наведення та підсилювач горизонтального наведення, електродвигун вертикального наведення та електродвигун горизонтального наведення, перший електронний вимірювальний пристрій, другий електронний вимірювальний пристрій, електронний датчик положення, перший та другий нагрівальні елементи, з'єднані між собою багатоканальними лініями зв'язку, при цьому блок керування містить контролер блока керування, формувач напруги +5В, формувач напруги +12В і погоджувальний пристрій блока керування, до складу контролера блока керування входять перший та другий стандартні послідовні канали зв'язку блока керування, перший та другий порти приймання інформації блока керування, порт керування блока керування, перший, другий, третій, четвертий спеціалізовані послідовні канали зв'язку, пульт керування командира містить контролер пульта керування командира, погоджувальний пристрій пульта керування командира з органами керування пульта командира, шинний формувач з індикаторами пульта керування командира, перетворювач напруга/код з джойстиком пульта командира, до складу контролера пульта командира входять перший та другий стандартні послідовні канали зв'язку пульта керування командира, перший порт приймання інформації, перший порт керування пульта керування командира, другий порт керування пульта керування командира другий порт приймання інформації пульта керування командира, спеціалізований послідовний канал зв'язку пульта керування командира, кожний з підсилювачів містить мікропроцесор та вихідний каскад, кожний 1 UA 102634 U 5 10 15 20 25 30 35 40 45 50 55 вимірювальний пристрій містить електронний вимірювач кутових швидкостей, електронний вимірювач проекції сили земного тяжіння, контролер вимірювального пристрою та перетворювачі напруга/код вимірювального пристрою, причому елементи цифрового стабілізатора зв'язані з елементами системи керування вогнем через багатоканальний обертовий контактний пристрій та пульт командира, та з'єднані між собою взаємними зв'язками, при тому, що цифровий стабілізатор встановлюється у башті броньованого об'єкта техніки [4]. Недоліками найближчого аналога, який визнано за прототип, є, насамперед, те, що опис прототипу більше відповідає не безпосередньо цифровому стабілізатору, а є описом системи керування, до якої входить цифровий стабілізатор. Даний прототип не є універсальним пристроєм, сферою його застосування є системи керування вогнем легкоброньованої техніки. Окремі вимірювальні пристрої для вимірювання еволюцій носія та башти, які можуть бути розміщені у різних частинах машини-носія, що викликає надмірну розгалуженість кабельної мережі міжприладних зв'язків, наявність зайвих (як для цифрового стабілізатора) пристроїв, які не використовуються пристроєм стабілізації, також ускладнює схемно-технічне та конструктивне виконання, збільшують технологічні витрати на виконання монтажних та регулювальних робіт. Наявність джойстика, як засобу керування, викликає необхідність використання перетворювача "напруга-код", і, таким чином, втрачається сам зміст поняття "цифровий стабілізатор", та збільшуються похибки стабілізації. Крім того, обробку та формування інформаційних сигналів від пристроїв, що не входять до складу цифрового стабілізатора, а саме - пультів керування командира/оператора, керування системою панорамного бачення, покладено на блок керування стабілізатором при наявності у складі системи керування вогнем окремого блока керування механізмами, що наділяє цифровий стабілізатор додатковими функціями, які не відносяться до функцій стабілізації, що також ускладнює схемно-технічне вирішення стабілізатора. В основу корисної моделі поставлена технічна задача удосконалення відомого пристрою з метою його універсалізації та підвищення його тактико-технічних характеристик (підвищення точності стабілізації блока озброєння) для використання його у складі систем керування вогнем як безлюдних, так і населених бойових модулів, та як вимірювача хитавиці при використанні його у складі плавзасобів малої і середньої водомісткості, зменшення матеріальних витрат на виготовлення та регулювання цифрового стабілізатора. Поставлена задача вирішується тим, що до схемно-технічного та конструктивного виконання цифрового стабілізатора внесені наступні зміни, а саме: - із складу цифрового стабілізатора вилучено блок керування, електронний датчик положення, другий вимірювальний пристрій перший та другий нагрівальні елементи, пульти керування командира/оператора; - до складу цифрового стабілізатора додатково внесено процесор, який конструктивно і технологічно розміщено у приладі керування; - до складу цифрового стабілізатора додатково внесено пульт стабілізації та наведення з маніпуляторами роздільного керування каналами кута місця і азимуту з використанням датчиків відхилення. Пульт стабілізації та наведення безпосередньо приєднується до приладу керування, а не через пульт керування командира/оператора системи керування. Крім того, на панелі органів керування пульта стабілізації та наведення розміщено органи керування, що структурно належать до системи керування вогнем, але таке розміщення їх є більш ергономічним та спрощує роботу командира/оператора; - вимірювальний пристрій виконано у вигляді інерціального вимірювального пристрою, що містить вимірювальний модуль, блок калібрування та обчислювач; - до складу цифрового стабілізатора додатково внесені горизонтальний та вертикальний приводи, що містять електромагніти стопорів та електродвигуни з механізмами горизонтального/вертикального наведення, що дає можливість їх регулювання обладнання окремо від поверхні встановлення, що зменшує кількість технологічного обладнання, технологічні та матеріальні витрати на складання та регулювання; - до складу цифрового стабілізатора додатково внесені датчики кута, що визначають поточне положення блока озброєння (по куту місця) та башти (по азимуту), які виконані у вигляді цифрових датчиків відхилення; - забезпечена можливість розміщення окремих блоків цифрового стабілізатора, а саме пульта стабілізації та наведення і інерціального вимірювального пристрою як у башті, так і у шасі бойової машини, що розширює експлуатаційні можливості системи керування вогнем машини-носія в цілому. Крім того, інерціальний вимірювальний пристрій може бути розміщений у будь-якому місці носія на значній відстані від осі обертання за рахунок внесення відповідних постійних поправок до керуючих сигналів, що спрощує конструкторське виконання і розміщення 2 UA 102634 U 5 10 15 20 25 30 35 40 45 50 55 60 цифрового стабілізатора усередині носія (об'єкта сухопутної легкоброньованої техніки або плавзасобу малої і середньої водомісткості). Суть корисної моделі у цифровому стабілізаторі рухомого об'єкта, що містить вимірювальний пристрій, підсилювачі горизонтального та вертикального наведення, електродвигуни з редукторами горизонтального та вертикального наведення, при тому, що кожний з підсилювачів містить контролер та вихідний каскад, при цьому підсилювачі горизонтального та вертикального наведення, електродвигуни з механізмами горизонтального та вертикального наведення розміщені у башті машини-носія. Новим у корисній моделі є те, що до складу цифрового стабілізатора додатково введені процесор, пульт стабілізації та наведення, горизонтальний привод, вертикальний привод, датчик кута азимута, датчик кута місця, вимірювальний пристрій виконано у вигляді інерціального вимірювального пристрою, що містить вимірювальний модуль, обчислювач даних та блок калібрування, причому вимірювальний блок містить трикоординатний вимірювач магнітного курсу, твердотільний трикоординатний акселерометр та трикоординатний гіроскопічний датчик кутових швидкостей, зібрані у єдиному блоці, до складу обчислювача даних входять суматори, інтегратор рівнянь орієнтації, обчислювач поправок та обчислювач кінцевих кутів орієнтації, пульт стабілізації та наведення містить панель органів керування, маніпулятори горизонтального та вертикального наведення, виконані на основі датчиків відхилення, причому панель органів керування та маніпулятори горизонтального і вертикального наведення містять кнопки та тумблери керування системою керування вогнем, маніпулятори горизонтального та вертикального наведення виконані з незалежним один від другого керуванням, до складу горизонтального приводу внесені електромагніт стопора горизонтального привода, електродвигун горизонтального привода з механізмом повороту, до складу вертикального приводу внесені електромагніт стопора вертикального привода, електродвигун вертикального привода з механізмом підйому, при тому, що горизонтальний та вертикальний приводи виконані за аналогічною схемою, датчик кута азимута та датчик кута місця виконані на основі цифрових датчиків відхилення, причому у загальному вигляді елементи цифрового стабілізатора зв'язані між собою двосторонніми багатоканальними електричними зв'язками, а саме, виходи інерціального вимірювального пристрою з'єднані з першим входом процесора, виходи пульта стабілізації та наведення двостороннім зв'язком зв'язані з другим входом-виходом процесора, до третього входу процесора надходить сигнал з датчика кута підйому, четвертий та п'ятий входи-виходи процесора двостороннім зв'язком зв'язані з входами-виходами, відповідно, підсилювача горизонтального приводу та підсилювача вертикального приводу, вертикальний привод зв'язаний механічним зв'язком з датчиком кута підйому та механічним зв'язком з об'єктом вертикальної стабілізації, горизонтальний привод зв'язаний механічним зв'язком з датчиком кута повороту та механічним зв'язком з об'єктом горизонтальної стабілізації, при чому, що інерціальний вимірювальний пристрій та пульт стабілізації та наведення можуть бути розміщені у будь якому місці носія на відстані від вісі обертання. Порівняльний аналіз технічного рішення із прототипом дозволяє зробити висновок, що цифровий стабілізатор рухомого об'єкта, що заявляється, повністю відповідає критерію корисної моделі "новизна". Цифровий стабілізатор рухомого об'єкта є пристроєм, що реалізує спосіб непрямої стабілізації об'єкта, наприклад візирної осі обладнання рухомих об'єктів: рухомих наземних об'єктів, наприклад прицілів або озброєння, та плавзасобів, наприклад корабельних пеленгаційних пристроїв. Непрямий спосіб стабілізації будь-якої візирної осі полягає в утриманні її у заданому, відносно Землі або орієнтира, напрямку. Стабілізація здійснюється шляхом введення поправок на кут азимута і кут місця (або кути хитавиці - при стабілізації об'єкта, розміщеного на плавзасобі), та обертанні візирної осі відносно відповідних осей наведення. При непрямий стабілізації осі наведення та осі стабілізації співпадають. Суть непрямого способу стабілізації полягає у перетворюванні кутових координат, що характеризують задане положення візирної осі, наприклад у земній системі координат, у відповідні кутові координати (параметри стабілізації), віднесені до зв'язаної системи координат сухопутної машини-носія або до корабельної (для плавзасобів), та у введенні їх в наведення візирної осі. Вирішення задачі перетворення кутових координат здійснюється цифровим способом процесором, до входу якого у цифровому вигляді подаються кути крену та тангажа (для сухопутних транспортних засобів) або кути хитавиці (для плавзасобів) від інерціального вимірювального пристрою. Кути еволюцій рухомого об'єкта від інерціального вимірювального пристрою надходять до перетворювача координат, куди також додаються кутові координати напрямку на визначений орієнтир (ціль), наприклад у земній системі координат. Контролер перераховує їх у кутові координати, віднесені до зв'язаної системи координат (для сухопутних 3 UA 102634 U 5 10 15 20 25 30 35 40 45 50 55 60 транспортних засобів) або до корабельної системи координат (для плавзасобів), які у подальшому відпрацьовуються за допомогою слідкувальних приводів. Завдяки цьому візирна вісь об'єкта стабілізації буде зберігати свій напрямок на визначений орієнтир (ціль) незалежно від еволюцій рухомого об'єкта. Таким чином здійснюється непряма стабілізація візирної осі на ціль [5]. У подальшому розглядається варіант використання цифрового стабілізатора у складі системи керування вогнем, яка встановлена на сухопутній машині-носії. Цифровий стабілізатор рухомого об'єкта виконаний на сучасному рівні з використанням сучасних цифрових технологій. Суть корисної моделі пояснюється кресленнями, на яких, як варіант конструктивного виконання, показано: - на Фіг. 1 - блок-схема цифрового стабілізатора; - на Фіг. 2 - блок-схема інерціального вимірювального пристрою; - на Фіг. 3 - блок-схема пульта стабілізації та наведення; - на Фіг. 4 - зовнішній вигляд пульта керування та наведення; - на Фіг. 5 - блок-схема підсилювача вертикального/горизонтального приводу; - на Фіг. 6 - блок-схема вертикального/горизонтального приводу. Блок-схема цифрового стабілізатора 1 рухомого об'єкта зображена на Фіг. 1, на який цифрами позначені інерціальний вимірювальний пристрій 2, пульт 3 стабілізації та наведення, процесор 4 цифрового стабілізатора 1, підсилювач 5 вертикального приводу 6, підсилювач 7 горизонтального 8, датчик 9 кута підйому (кута місця), датчик 10 кута повороту (кута азимута). Крім того, на Фіг. 1 зображено об'єкт 11 вертикальної стабілізації, об'єкт 12 горизонтальної стабілізації та прилад 13 керування, які не входять безпосередньо до складу цифрового стабілізатора, але зв'язані з ним конструктивно і технологічно. Процесор 4 цифрового стабілізатора 1 конструктивно і технологічно розміщено у приладі 13 керування системи керування. Як об'єкт 11 вертикальної стабілізації може бути, наприклад, візирна вісь блока озброєння бойового модуля, а як об'єкт 12 горизонтальної стабілізації, наприклад, - башта бойового модуля носія. У загальному вигляді елементи цифрового стабілізатора 1 зв'язані між собою електричними багатоканальним зв'язком, а саме, виходи інерціального вимірювального пристрою 2 з'єднані з першим входом процесора 4, виходи пульта 3 стабілізації та наведення двостороннім зв'язком зв'язані з другим входом-виходом процесора 4, до третього входу процесора 4 надходить сигнал з датчика 10 кута підйому, четвертий та п'ятий входи-виходи процесора 4 двостороннім зв'язком зв'язані з входами-виходами, відповідно, підсилювача 7 горизонтального 8 та підсилювача 5 вертикального приводу 6. Крім того, вертикальний привод 6 зв'язаний механічним зв'язком 14 з датчиком 9 кута підйому та механічним зв'язком 15 з об'єктом 11 вертикальної стабілізації, наприклад візирною віссю блока озброєння бойового модуля, горизонтальний привод 8 зв'язаний механічним зв'язком 15 з датчиком 10 кута повороту та механічним зв'язком 17 з об'єктом 12 горизонтальної стабілізації, наприклад баштою бойового модуля. Інерціальний вимірювальний пристрій 2 та пульт 3 стабілізації та наведення можуть бути розміщені у будь-якому місці корпуса шасі машини-носія, інші компоненти цифрового стабілізатора 1 розміщуються у башті бойового модуля машини-носія. Блок-схема інерціального вимірювального пристрою 2, який виконано на основі інерціального вимірювального модуля, наведена на Фіг. 2, де цифрами позначено вимірювальний модуль 18, обчислювач 19 даних та блок 20 калібрування. Вимірювальний модуль 18 містить трикоординатні вимірювач 21 магнітного курсу, твердотільний акселерометр 22 (вимірювач кутових прискорень) та гіроскопічний датчик 23 кутових швидкостей, зібрані у єдиному блоці. До складу обчислювача 19 даних входять суматор 24, інтегратор 25 рівнянь орієнтації, обчислювач 26 поправок та обчислювач 27 кінцевих кутів орієнтації. Інерціальний вимірювальний пристрій 2 встановлюється у будь-якому місці носія у відповідності з орієнтацією його вимірювальних осей X, Y, Z, бажано - як найближче до об'єкта 11 вертикальної стабілізації або безпосередньо на ньому, з внесенням відповідних постійних поправок до програмного забезпечення процесора 4 інерціального вимірювального пристрою 2. Конструктивно і електрично елементи інерціального вимірювального пристрою 2 з'єднані таким чином. Виходи вимірювача 21 магнітного курсу та акселерометра 22 з'єднані з першим та другим входами, відповідно, обчислювача 26 поправок та із входом блока 20 калібрування. Вихід вимірювача 23 кутових швидкостей з'єднано з першим входом суматора 24, другий вхід якого з'єднано з третім виходом обчислювача 26 поправок. Третій вихід суматора 24 з'єднано з першим входом інтегратора 25, другий вхід якого з'єднано з виходом блока 20 калібрування. Третій вихід інтегратора 25 з'єднано з четвертим входом обчислювача 26 поправок. Четвертий вихід інтегратора 25 з'єднано з обчислювачем 27 кутів. Вихід обчислювача 27 кутів є виходом інерціального вимірювального пристрою 2. Інформація з інерціального вимірювального 4 UA 102634 U 5 10 15 20 25 30 35 40 45 50 55 пристрою 2 надходить до першого входу процесора 4 у цифровому вигляді. Інерціальний вимірювальний пристрій 2 призначений для вимірювання кутових швидкостей і кутових прискорень машини-носія відносно горизонтальних і вертикальної осей, та вимірювання магнітного курсу машини-носія для подальшого інтегрування отриманих даних для формування кутів повороту у земній системі координат та видачі зазначеної інформації до процесора 4. Блок-схему пульта 3 стабілізації та наведення наведено на Фіг. 3. Пульт 3 стабілізації та наведення містить панель 28 органів керування, маніпулятори 29 та 30. Конструктивно і технологічно (див. Фіг. 4) пульт 3 розміщено на осі маніпулятора 29: при обертанні пульта 3 відбувається обертання об'єкта 12 стабілізації у горизонтальній площині (горизонтальне наведення), через пульт 3 проходить вісь 31 маніпулятора 30: при обертанні рукоятей маніпулятора 30 відносно корпуса пульта 3 відбувається поворот об'єкта 11 стабілізації у вертикальній площині (вертикальне наведення). На передній частині пульта 3 стабілізації та наведення розміщено панель 28 органів керування: тумблер 32 включення електроприводів 6 та 8, перемикач 33 режимів "Автомат" - "Напівавтомат". Крім того, на лівій та правій рукоятях маніпулятора 30 додатково розміщені органи керування системи керування: кнопка 34 виконання пострілу з одного типу озброєння, кнопка 35 виконання пострілу з другого типу озброєння, кнопка 36 включення режиму "Автосупроводження" та кнопка 37 включення далекоміра, а на панелі 28 органів керування додатково розміщені кнопка 38 включення режиму роботи та кнопка 39 перебору цілей. Конструктивно і електрично елементи пульта 3 з'єднані між собою таким чином: вихід панелі 28 органів керування з'єднано із входом/виходом пульта 3 стабілізації та наведення, який одночасно є входом/виходом пульта 3 стабілізації та наведення. Виходи маніпуляторів 29 і 30 з'єднані з входом/виходом пульта 3 стабілізації та наведення. Пульт 3 стабілізації та наведення призначений для керування процесами стабілізації об'єктів стабілізації - зміною параметрів стабілізації (режим, напрямок та швидкість наведення візирної вісі) та, додатково, керування системою керування вогнем носія. Блок-схему підсилювача 5 вертикального приводу 6 та підсилювача 7 горизонтального приводу 8 показано на Фіг. 5. Конструктивно і технологічно підсилювачі 5 та 7 виконані за аналогічною схемою. На Фіг. 5 цифрами позначено контролер 40 та вихідний каскад 41. Елементи підсилювача 5 вертикального приводу (підсилювача 7 горизонтального приводу) з'єднані між собою таким чином. Перший вхід контролера 40 є входом відповідного підсилювача 5 або 6, другий вихід контролера 40 з'єднаний з другим входом вихідного каскаду 41, третій вхід контролера 40 з'єднаний з третім виходом вихідного каскаду 41. Перший вихід вихідного каскаду 41 є виходом підсилювача 5 або 7 відповідного приводу. Підсилювачі 5, 7 призначені для приймання керуючої інформації від процесора 4, формування сигналів керування стопорами, формування напруги керування електродвигунами, тривалість імпульсу якої відповідає заданому коду та контролю стану вихідних каскадів, електромагнітів і стопорів. Блок-схему горизонтального приводу 6 та вертикального приводу 8 показано на Фіг. 6. Конструктивно і технологічно приводи 6 та 8 виконані за аналогічною схемою. На Фіг. 6 цифрами позначено електромагніт 42 стопору відповідного привода, електродвигун 43 та механізм 42 підйому (повороту). Електродвигун 43 з'єднаний з механізмом 44 підйому (повороту) механічним зв'язком 45. Механічні зв'язки 14 (16) з'єднують приводи 6 або 8 з відповідним об'єктами 11 або 12 стабілізації та забезпечують зміну їх положень відносно заданих орієнтирів, механічні зв'язки 15 (17) з'єднують приводи 6 (8) з відповідним датчиком кута (9 або 10). Конструктивно і електрично елементи приводів 6 та 8 наведення з'єднані між собою таким чином. Перший вхід електромагніта 42 стопора з'єднаний з виходом відповідного підсилювача (5 або 7), другий вихід електромагніта 42 стопора з'єднаний з першим входом електродвигуна 43. Треті виходи електромагніта 42 стопора та електродвигуна 43 з'єднано з виходом відповідного привода 6 або 8. Приводи приводів 6 та 8 призначені для відпрацювання перетворених процесором 4 керуючих сигналів інерціального вимірювального пристрою 2 - для обертання об'єкта 12 стабілізації у горизонтальної площині відносно корпуса носія та для підйому-опускання об'єкта 11 стабілізації у вертикальній площині. Датчик 9 кута місця та датчик 10 кута азимута призначені для поточного відслідковування та контролю відпрацьовування відповідних кутів місця та азимута механізмами горизонтального 6 та вертикального 8 приводів. Конструктивно датчики 9 та 10 виконані аналогічно один одному на основі енкодерів, що видають інформацію у цифровому коді. Робота цифрового стабілізатора - стабілізація візирної осі за двома координатами, здійснюється таким чином. Включення горизонтального привода 6 та вертикального привода 8 здійснюється включенням тумблера 32 на панелі 28 пульта 3 стабілізації та наведення. 5 UA 102634 U 5 10 15 20 25 30 35 40 45 50 Робота цифрового стабілізатора 1 може здійснюватися у трьох режимах: "Автосупроводження", "Автоматичний" та "Напівавтоматичний", перемикання яких здійснюється за допомогою відповідних органів керування - перемикача 33 та кнопки 36. При перемиканні перемикача 33 у положення "Автоматичний" стабілізатор 1 починає працювати у режимі двоплощинної стабілізації: у горизонтальній (по куту азимута) та вертикальній (по куту місця) площинах. При переведенні перемикача 33 у положення "Напівавтоматичний" цифровий стабілізатор 1 починає працювати у режимі одноплощинної стабілізації (по куту азимута), а стабілізація у вертикальній площині (по куту місця) здійснюється оператором у ручному режимі за допомогою маніпуляторів 30. При натисканні кнопки 36 "Автосупроводження" керування цифровим стабілізатором здійснюється у автоматичному режимі по командах процесора 4 від зовнішнього джерела інформації:(наприклад, системи панорамного бачення або приладів наведення). При включенні цифрового стабілізатора 1 вимірювальний модуль 18 інерціального вимірювального пристрою 2 визначає еволюції (кутові швидкості, кутові прискорення, магнітний курс по трьом координатам X, Y, Z) об'єкта стабілізації по трьох взаємноортогональних осях X, Y, Z у земній системі координат та передає отриману та оброблену інформацію до процесора 4, конструктивно розміщеного у приладі 13 керування. Процесор 4 перетворює земні координати у координати, зв'язані з носієм, і у вигляді сигналу керування (із зворотнім знаком) направляє їх до вертикального 6 та горизонтального 8 приводів, які і утримують візирну вісь об'єкта стабілізації у нульовому положенні відносно координатних осей носія. У подальшому сигнал з інерціального вимірювального пристрою 2 використовується як необхідна поправка до змінних координат параметрів стабілізації об'єкта стабілізації. У режимі наведення на ціль оператор при знаходженні цілі у полі зору приладу наведення або системи панорамного бачення натисканням відповідної кнопки панелі 28 органів керування пульта 3 стабілізації та наведення включає режим автосупроводження, цифровий стабілізатор 1 повертає об'єкт 12 стабілізації у горизонтальній площині, відпрацьовуючи кути місця горизонтальним приводом 8 разом з візирною віссю об'єкта 11 стабілізації, та піднімає (опускає) візирну вісь об'єкта 11 стабілізації у вертикальній площині, відпрацьовуючи кути азимута вертикальним приводом 6, у потрібних напрямках і з визначеними швидкостями, підтримуючи, у подальшому, їх положення у просторі відносно зв'язаної системи координат. Поточний контроль за положенням об'єкта 12 стабілізації у горизонтальній площині, а також положення об'єкта 11 стабілізації відносно заданого положення у вертикальній та горизонтальній площинах проводиться відповідними датчиками 9 та 10 кутів відхилення. Підвищення ефективності застосування цифрового стабілізатора рухомого об'єкта досягається шляхом проведення схемно-технічних та конструктивних змін та введенням до складу цифрового стабілізатора більш ефективних та надійних сучасних цифрових технологій і обладнання. Цифровий стабілізатор системи керування вогнем рухомого об'єкту може використовуватись у складі систем керування вогнем типа "Тріада" на всіх, без обмежень, типах легкоброньованої техніки - бронетранспортерах, бойових машинах піхоти та десанту тощо, а також як вимірювач хитавиці на плавзасобах, без додаткових доопрацювань. Джерела інформації: 1. БМ 9А33БМ3. Технічний опис. Книга 2. Радіолокаційна станція виявлення цілі та система стабілізації 9В611БМ2. Видання офіційне. М., 2002 - аналог. 2. Стабілізатори танкового озброєння 2Е28 (2Е28М-2). Технічний опис. Військове видавництво МО СРСР. - М., 1979 - аналог. 3. Стабілізатор СВУ-500 (Інструкція по експлуатації стабілізатора СВУ-500 ЮКАІ.461314.001-01ІЕ) - аналог. 4. Патент України UA № 36181 U "Цифровий стабілізатор системи керування вогнем", МПК (2006) G05B 13/00, G05B 21/00, G05D 1/00, G05D 3/00, бюл. № 19, 2008 р., 10.10.2008 прототип. 5. Пиронер Я.М., Цисарж В.В., Вознюк А.І., Шляхи побудови систем двохосної стабілізації для легкоброньованої техніки на базі AHRS., УДК 531.383. 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 Цифровий стабілізатор рухомого об'єкта, що містить вимірювальний пристрій, підсилювачі горизонтального та вертикального наведення, електродвигуни з редукторами горизонтального та вертикального наведення, при тому, що кожний з підсилювачів містить контролер та вихідний каскад, при цьому підсилювачі горизонтального та вертикального наведення, електродвигуни з 6 UA 102634 U 5 10 15 20 25 30 механізмами горизонтального та вертикального наведення розміщені у башті машини-носія, який відрізняється тим, що до складу цифрового стабілізатора додатково введені процесор, пульт стабілізації та наведення, горизонтальний привод, вертикальний привод, датчик кута азимута, датчик кута місця, вимірювальний пристрій виконано у вигляді інерціального вимірювального пристрою, що містить вимірювальний модуль, обчислювач даних та блок калібрування, причому вимірювальний блок містить трикоординатний вимірювач магнітного курсу, твердотільний трикоординатний акселерометр та трикоординатний гіроскопічний датчик кутових швидкостей, зібрані у єдиному блоці, до складу обчислювача даних входять суматори, інтегратор рівнянь орієнтації, обчислювач поправок та обчислювач кінцевих кутів орієнтації, пульт стабілізації та наведення містить панель органів керування, маніпулятори горизонтального та вертикального наведення та виконані на основі датчиків відхилення, причому панель органів керування та маніпулятори горизонтального і вертикального наведення додатково містять кнопки та тумблери керування системою керування, маніпулятори горизонтального та вертикального наведення виконані з незалежним один від одного керуванням, до складу горизонтального приводу внесені електромагніт стопора горизонтального привода, електродвигун горизонтального привода з механізмом повороту, до складу вертикального приводу внесені електромагніт стопора вертикального привода, електродвигун вертикального привода з механізмом підйому, при тому, що горизонтальний та вертикальний приводи виконані за аналогічною схемою, датчик кута азимута та датчик кута місця виконані на основі цифрових датчиків відхилення, причому у загальному вигляді елементи цифрового стабілізатора зв'язані між собою двосторонніми багатоканальними електричними зв'язками, а саме, виходи інерціального вимірювального пристрою з'єднані з першим входом процесора, виходи пульта стабілізації та наведення двостороннім зв'язком зв'язані з другим входом-виходом процесора, до третього входу процесора надходить сигнал з датчика кута підйому, четвертий та п'ятий входи-виходи процесора двостороннім зв'язком зв'язані з входамивиходами, відповідно, підсилювача горизонтального приводу та підсилювача вертикального приводу, вертикальний привод зв'язаний механічним зв'язком з датчиком кута підйому та механічним зв'язком з об'єктом вертикальної стабілізації, горизонтальний привод зв'язаний механічним зв'язком з датчиком кута повороту та механічним зв'язком з об'єктом горизонтальної стабілізації, при чому, що інерціальний вимірювальний пристрій та пульт стабілізації та наведення можуть бути розміщені у будь-якому місці машини-носія на відстані від осі обертання. 7 UA 102634 U 8 UA 102634 U 9 UA 102634 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюMovable object digital stabilizer
Автори англійськоюOchahovskyi Stanislav Yanovych, Pyroner Yan Mykhailovych, Markus Volodymyr Semenovych, Tsysarzh Viacheslav Viktorovych
Назва патенту російськоюЦифровой стабилизатор подвижного объекта
Автори російськоюОчаговский Станислав Янович, Пиронер Ян Михайлович, Маркус Владимир Семенович, Цисарж Вячеслав Викторович
МПК / Мітки
МПК: G05B 13/00, G05D 3/00, G05D 1/00, G05B 21/00
Мітки: стабілізатор, цифровий, рухомого, об'єкта
Код посилання
<a href="https://ua.patents.su/12-102634-cifrovijj-stabilizator-rukhomogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Цифровий стабілізатор рухомого об’єкта</a>
Цифровий стабілізатор системи керування вогнем
Номер патенту: 36181
Опубліковано: 10.10.2008
Автори: Піронер Ян Михайлович, Гузь Володимир Іванович, Яковлев Віталій Васильович, Свириденко Анатолій Олексійович, Яновський Юрій Васильович, Маркус Володимир Семенович, Немчин Олександр Федорович, Колесник Костянтин Іванович, Медвідь Володимир Станіславович
МПК: G05B 13/00, G05B 21/00, G05D 1/00, G05D 3/00
Мітки: вогнем, керування, системі, стабілізатор, цифровий
Формула / Реферат:
Цифровий стабілізатор системи керування вогнем, що містить пульт керування командира, блок керування, підсилювач вертикального наведення та підсилювач горизонтального наведення, електродвигун вертикального наведення та електродвигун горизонтального наведення, з'єднані між собою взаємними зв'язками, при цьому зазначений цифровий стабілізатор системи керування вогнем встановлений в башті броньованого об'єкта техніки, який відрізняється тим, що...
Стабілізатор танкової гармати
Номер патенту: 83903
Опубліковано: 10.10.2013
Автори: Александрова Тетяна Євгенівна, Лазаренко Артем Олександрович
МПК: F41G 5/00
Мітки: стабілізатор, гармати, танкової
Формула / Реферат:
Стабілізатор танкової гармати, який містить пульт наведення, гіроскопічні датчики відхилення осі каналу стволу танкової гармати у вертикальній і горизонтальній площинах відносно лінії прицілювання, гіроскопічні датчики кутових швидкостей обертання танкової гармати відносно осі цапф у вертикальній площині і танкової башти з гарматою у горизонтальної площині, датчик лінійних прискорень танкової башти відносної поперечної осі інерції,...
Стабілізатор вертикального наведення безпечної стрільби бойової машини піхоти
Номер патенту: 27286
Опубліковано: 25.10.2007
Автор: Ковч Владислав Юрійович
МПК: F41A 17/00
Мітки: стрільби, безпечної, вертикального, стабілізатор, машини, бойової, піхоти, наведення
Формула / Реферат:
Стабілізатор вертикального наведення безпечної стрільби бойової машини піхоти, який містить привід вертикального наведення, який розташований у башті, кінцевий вимикач обмеження підвищення спареної установки та кронштейн упора обмеження підвищення спареної установки, який відрізняється тим, що додатково містить регулювальну планку, кутомірну шкалу, регулювальні болти, при цьому кутомірна шкала з регулювальною планкою закріплена до кронштейна...
Стабілізатор безпечної стрільби бойової машини піхоти з місця
Номер патенту: 25985
Опубліковано: 27.08.2007
Автори: Ковч Владислав Юрійович, Бокачов Сергій Вікторович, Василів Юрій Ігорович
МПК: F41A 17/00
Мітки: бойової, безпечної, місця, стрільби, піхоти, стабілізатор, машини
Формула / Реферат:
Стабілізатор безпечної стрільби бойової машини піхоти з місця, який містить привід горизонтального наведення, який розташований у верхньому і нижньому погонах башти, кінцевий вимикач стопора башти, який відрізняється тим, що додатково містить регулювальну планку, кутомірну шкалу, регулювальні болти, кінцеві вимикачі повороту башти, перехідну коробку, при цьому кутомірна шкала з регулювальною планкою, що встановлена на нижньому погоні башти,...
Стабілізатор основного озброєння танка
Номер патенту: 81491
Опубліковано: 25.06.2013
Автор: Александрова Тетяна Євгенівна
МПК: F41G 5/00
Мітки: озброєння, стабілізатор, основного, танка
Формула / Реферат:
Стабілізатор основного озброєння танка, який містить гіроскопічний датчик кута відхилення осі каналу ствола танкової гармати від лінії прицілювання і гіроскопічний датчик кутової швидкості танкової гармати відносно осі цапф, електронний блок, що містить випростувачі вихідних сигналів гіроскопічних датчиків кута і кутової швидкості, підсилювачі випростаних сигналів і суматор, а також електрогідравлічний підсилювач, причому виходи...
Попередній патент: Пристрій для очищення труб
Наступний патент: Автомобільний привод
Випадковий патент: Спосіб оптимізації лікування хворих на гастроезофагеальну рефлюксну хворобу