Стабілізатор танкової гармати
Номер патенту: 83903
Опубліковано: 10.10.2013
Автори: Лазаренко Артем Олександрович, Александрова Тетяна Євгенівна
Формула / Реферат
Стабілізатор танкової гармати, який містить пульт наведення, гіроскопічні датчики відхилення осі каналу стволу танкової гармати у вертикальній і горизонтальній площинах відносно лінії прицілювання, гіроскопічні датчики кутових швидкостей обертання танкової гармати відносно осі цапф у вертикальній площині і танкової башти з гарматою у горизонтальної площині, датчик лінійних прискорень танкової башти відносної поперечної осі інерції, електронний блок, входи якого електрично з'єднані з виходами перелічених датчиків, а виходи електрично з'єднані з виконавчими органами стабілізатора, а саме з електрогідравлічним підсилювачем в каналі вертикального наведення, який гідравлічно з'єднаний з виконавчим гідроциліндром, шток якого шарнірно пов'язаний з казенною частиною танкової гармати, і з електромашинним підсилювачем, що електрично з'єднаний з виконавчим електродвигуном постійного струму, якір якого через редуктор пов'язаний з погоном танкової башти у горизонтальній площині, який відрізняється тим, що в порожнинах виконавчого гідроциліндру встановлені датчики тиску робочої рідини, виходи яких електрично з'єднані зі входами електронного блока.
Текст
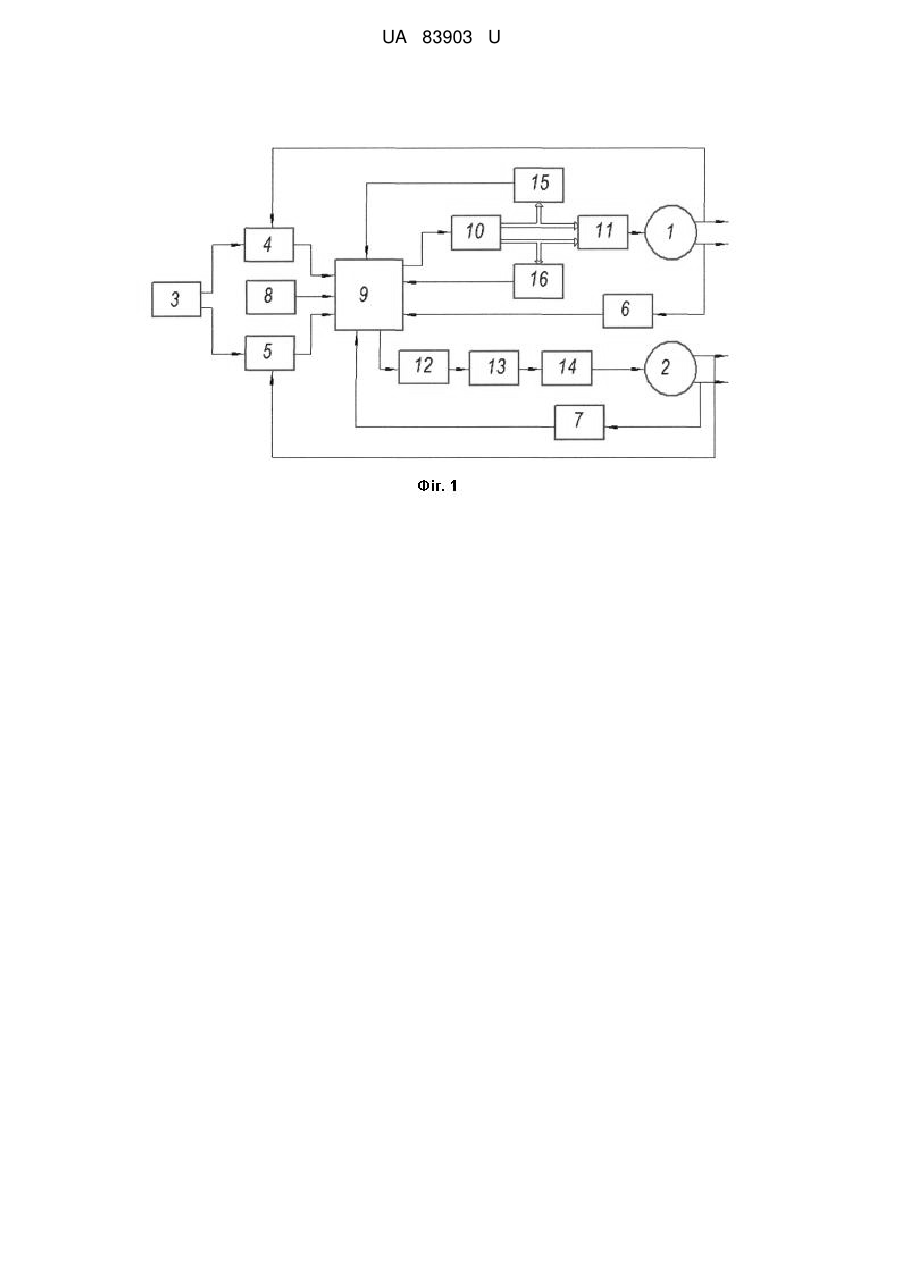
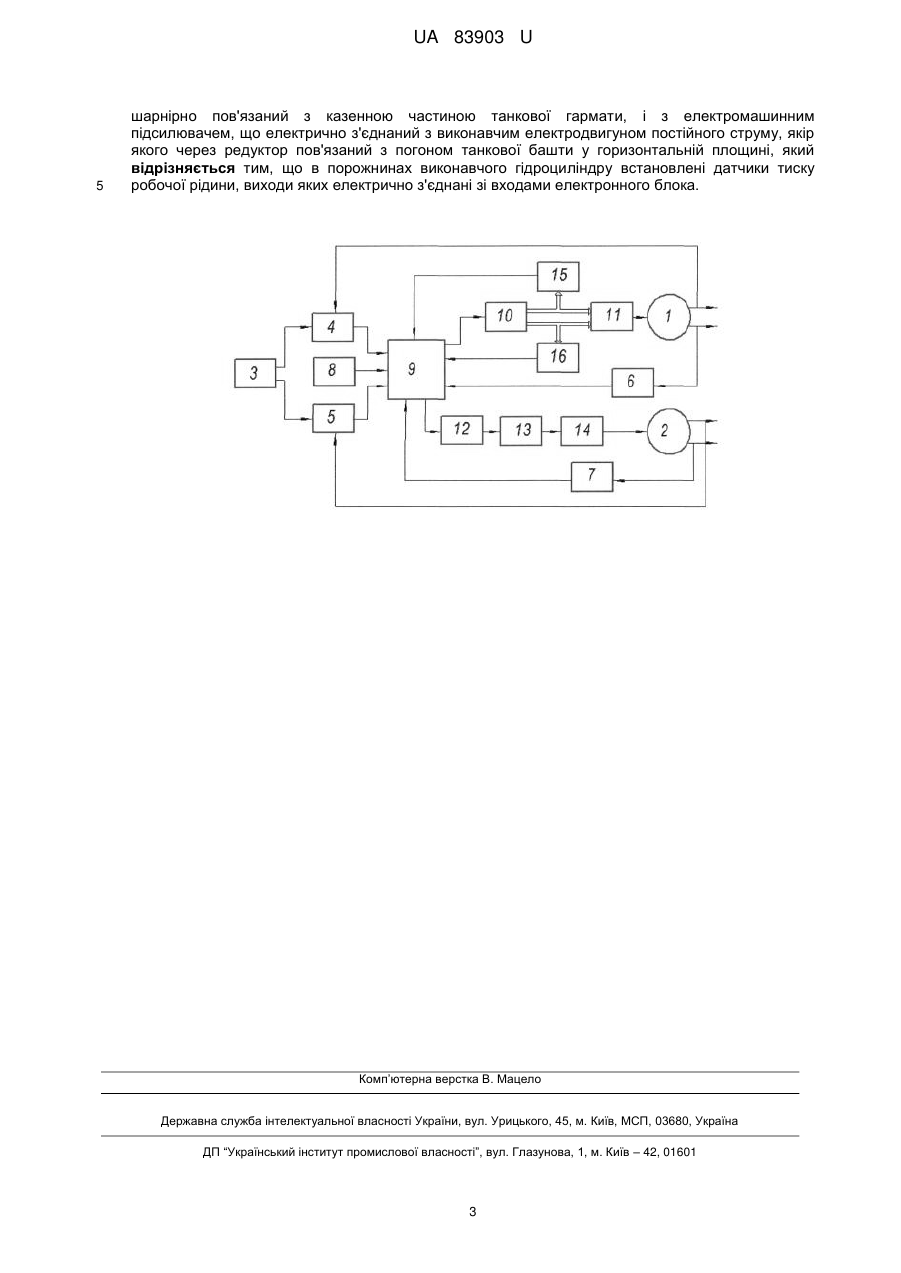
Реферат: UA 83903 U UA 83903 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі танкобудування і може бути використана в системах керування вогнем танків. Відомий стабілізатор танкової гармати, який містить пульт наведення, датчики кутів відхилення осі каналу стволу танкової гармати у вертикальній і горизонтальній площинах відносно лінії прицілювання і датчики кутових швидкостей обертання танкової гармати відносно осі цапф у вертикальній площині і танкової башти з гарматою у горизонтальній площині, електронний блок, входи якого електрично з'єднані з виходами перелічених датчиків, а виходи електрично з'єднані з виконавчими органами стабілізатора, а саме з електрогідравлічним підсилювачем, що гідравлічно з'єднаний з виконавчим гідроциліндром, вихідний шток якого шарнірно пов'язаний з казенною частиною гармати у вертикальній площині, і електромашинним підсилювачем, що електрично з'єднаний з виконавчим електродвигуном постійного струму, якір якого через понижувальний редуктор пов'язаний з погоном танкової башти у горизонтальній площині [1]. Недоліком цього стабілізатора є невисока точність стабілізації осі каналу стволу танкової гармати відносно лінії прицілювання. Дійсно, при русі танка по пересічній місцевості його корпус здійснює подовжньо-кутові коливання. Завдяки силі сухого та рідкого тертя у осі цапф танкової гармати, ці коливання викликають відхилення стволу гармати від заданого наводкою напрямку у вертикальній площині. У горизонтальній площині відхилення башти з гарматою від заданого напрямку викликається дією відцентрованої сили, що прикладена до центру мас башти, який не співпадає з центром обертання башти. Відомий також стабілізатор танкової гармати [2], вибраний прототипом пропонованої корисної моделі. Він містить пульт наведення, датчики кутів відхилення осі каналу стволу танкової гармати у вертикальній і горизонтальній площинах відносно лінії прицілювання і датчики кутових швидкостей обертання танкової гармати відносно осі цапф у вертикальній площині і танкової башти з гарматою у горизонтальній площині, електронний блок, входи якого електрично з'єднані з виходами перелічених датчиків, а виходи електрично з'єднані з виконавчими органами стабілізатору, а саме з електрогідравлічним підсилювачем, що гідравлічно з'єднаний з виконавчим гідроциліндром, вихідний шток якого шарнірно пов'язаний з казенною частиною гармати у вертикальній площині, і електромашинним підсилювачем, що електрично з'єднаний з виконавчим електродвигуном постійного струму, якір якого через понижувальний редуктор пов'язаний з погоном танкової башти у горизонтальній площині, окрім датчиків кутів і кутових швидкостей містить датчик лінійних прискорень башти відносно її поперечної осі. Дійсно, якщо танкова гармата статично врівноважена відносно осі цапф, то танкова башта з гарматою неврівноважена відносно осі її обертання. Тому складова лінійного прискорення, яка виникає при повороті башти, спрямована вздовж поперечної осі обертання башти, що уводить башту з гарматою від заданого наводкою напрямку на ціль. Оскільки первинною причиною такого уводу є складова лінійного прискорення башти, що спрямована вздовж її поперечної осі у канал горизонтального наведення стабілізатору введено датчик лінійних прискорення. В прототипі на виході електричного блока стабілізатора з'являється сигнал, обумовлений лінійним прискоренням башти ще до появи відхилення осі каналу ствола від напрямку на ціль. Для замкненої системи стабілізації танкової башти з гарматою лінійне прискорення є зовнішнім збуренням, тобто стабілізатор поєднує два відомі принципи управління, а саме, принцип управління за відхиленням шляхом вимірювання кута відхилення осі каналу стволу танкової гармати від напрямку на ціль та кутові швидкості повороту башти з подальшим використанням виміряних величин у алгоритмі стабілізації, і принцип управління за збуренням шляхом вимірювання складової лінійного прискорення башти вздовж її поперечної осі з подальшим використанням величини лінійного прискорення в алгоритмі стабілізації. При такому комбінуванні двох принципів управління точність стабілізації осі каналу стволу танкової гармати у площині горизонтального наведення значно зростає. Але у прототипі точність стабілізації гармати в каналі вертикального наведення недостатня. В основу корисної моделі поставлено задачу підвищення точності стабілізації осі каналу стволу танкової гармати відносно напрямку на ціль шляхом поєднання двох принципів управління у каналі вертикального наведення. Технічний результат досягається тим, що в порожнинах виконавчого гідроциліндру встановлені датчики тиску робочої рідини, виходи яких електрично з'єднані зі входами електричного блока. Хоча танкова гармата статично врівноважена відносно осі цапф, у процесі руху танка по пересічній місцевості подовжньо-кутові коливання підресореної частини корпусу танка викликають прикладене до гармати зовнішнє збурення, яке уводить вісь каналу стволу від напрямку на ціль і викликає перепад тиску робочої рідини у порожнинах виконавчого 1 UA 83903 U 5 10 15 20 25 30 35 40 45 гідроциліндру. Якщо вимірювати перепад тиску робочої рідини та ввести вимірювану величину у алгоритм стабілізації, то стабілізатор у вертикальному каналі наведення почне реагувати на зовнішнє збурення, не чекаючи відхилення осі каналу стволу від напрямку на ціль у вертикальній площині. На фіг. 1 показана структурна схема пропонованого стабілізатора танкової гармати. Схема включає танкову гармату 1, що обертається у вертикальній площині відносно осі цапф, і танкову башту 2, що обертається у горизонтальній площині відносно осі погону башти; пульт наведення 3, за допомогою якого наводчик суміщає лінію прицілювання з напрямком на ціль, гіроскопічні датчики відхилення осі каналу стволу танкової гармати у вертикальній і горизонтальній площинах відносно лінії прицілювання 4 і 5, гіроскопічні датчики кутової швидкості обертання танкової гармати відносно осі цапф у вертикальній площині 6 і танкової башти з гарматою у горизонтальній площині 7, датчик лінійних прискорень танкової башти відносно власної поперечної осі інерції 8, електронний блок 9, входи якого електрично з'єднані з виходами датчиків 4, 5, 6, 7 і 8, а виходи електрично з'єднані з виконавчими органами стабілізатора, а саме, електрогідравлічними підсилювачем 10, що гідравлічно з'єднаний з виконавчим гідроциліндром 11, вихідний шток якого шарнірно пов'язаний з казенною частиною гармати 1 у вертикальній площині, і з електромашинним підсилювачем 12, що електрично з'єднаний з виконавчим електродвигуном постійного струму 13, якір якого через понижувальний редуктор 14 пов'язаний з погоном танкової башти 2 у горизонтальній площині. В порожнинах виконавчого гідроциліндру 11 встановлені датчики тиску робочої рідини 15 і 16, виходи яких електрично з'єднані зі входами електронного блока 9. Стабілізатор танкової гармати працює наступним чином. За допомогою пульту наведення 3 наводчик формує електричні сигнали постійного струму на електромагніти наведення гіроскопічних датчиків кутів 4 і 5, які створюють механічні моменти, що прикладаються до внутрішніх рамок гіроскопічних датчиків. Під дією цих моментів зовнішні рамки гіроскопічних датчиків 4 і 5 прецесують у відповідних напрямках. Із зовнішніми рамками гіроскопів механічно з'єднано головне дзеркало прицілу 17, яке рухається поруч із зовнішніми рамками гіроскопів до попадання в дзеркало зображення цілі і утворення лінії прицілювання. В цей момент процес наведення на ціль припиняється і починається процес стабілізації осі каналу стволу танкової гармати відносно утвореної лінії прицілювання (уявної лінії, що з'єднує ціль з її зображенням у головному дзеркалі прицілу). Кутові відхилення осі каналу стволу танкової гармати 1 відносно лінії прицілювання у вертикальній площині і танкової башти 2 у горизонтальній площині вимірюються гіроскопічними датчиками кутів 4 і 5; кутова швидкість обертання гармати 1 у вертикальній площині і башти з гармати 2 у горизонтальній площині вимірюються гіроскопічними датчиками кутової швидкості 6 і 7; складова лінійного прискорення танкової башти відносно її власної поперечної осі інерції вимірюється датчиком лінійних прискорень 8, а тиск робочої рідини у порожнинах виконавчого гідроциліндру 11 і вимірюється датчиками тиску 15 і 16. На підґрунті інформації з виходів цих датчиків електронний блок формує алгоритми стабілізації осі каналу стволу танкової гармати відносно напрямку на ціль у вертикальній площині і у горизонтальній площині. Запропонована корисна модель забезпечує підвищену точність стабілізації у порівнянні з аналогами і у порівнянні з прототипом. Підвищення точності стабілізації досягається за рахунок поєднання в корисній моделі двох принципів управління: за відхиленням і за збуренням, як в каналі горизонтального, так і в каналі вертикального наведення. Джерела інформації: 1. Руководство по материальной части и эксплуатации танка Т-55. - М.: Военное издательство Министерства обороны СССР, 1960. 2. Объект 447А(437А). Техническое описание и инструкция по эксплуатации. Книга вторая. М.: Военное издательство Министерства обороны СССР, 1985. 50 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 55 60 Стабілізатор танкової гармати, який містить пульт наведення, гіроскопічні датчики відхилення осі каналу стволу танкової гармати у вертикальній і горизонтальній площинах відносно лінії прицілювання, гіроскопічні датчики кутових швидкостей обертання танкової гармати відносно осі цапф у вертикальній площині і танкової башти з гарматою у горизонтальної площині, датчик лінійних прискорень танкової башти відносної поперечної осі інерції, електронний блок, входи якого електрично з'єднані з виходами перелічених датчиків, а виходи електрично з'єднані з виконавчими органами стабілізатора, а саме з електрогідравлічним підсилювачем в каналі вертикального наведення, який гідравлічно з'єднаний з виконавчим гідроциліндром, шток якого 2 UA 83903 U 5 шарнірно пов'язаний з казенною частиною танкової гармати, і з електромашинним підсилювачем, що електрично з'єднаний з виконавчим електродвигуном постійного струму, якір якого через редуктор пов'язаний з погоном танкової башти у горизонтальній площині, який відрізняється тим, що в порожнинах виконавчого гідроциліндру встановлені датчики тиску робочої рідини, виходи яких електрично з'єднані зі входами електронного блока. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F41G 5/00
Мітки: танкової, гармати, стабілізатор
Код посилання
<a href="https://ua.patents.su/5-83903-stabilizator-tankovo-garmati.html" target="_blank" rel="follow" title="База патентів України">Стабілізатор танкової гармати</a>
Система керування заряджаючим механізмом танкової гармати
Номер патенту: 61129
Опубліковано: 17.11.2003
Автори: Ганзера Юрій Іванович, Царєв Ігор Володимирович, Петраченко Любов Парфенівна, Мошнін Віктор Миколайович
Мітки: заряджаючим, танкової, механізмом, система, керування, гармати
Формула / Реферат:
1. Система керування заряджаючим механізмом танкової гармати, що містить блок дозволу пострілу балістичного обчислювача, блок керування заряджанням прицілу навідника, блок керування стрільбою прицілу навідника, з'єднаний першим входом з першим виходом блока керування заряджанням прицілу навідника, електроприводи автомата заряджання, підключені до першого виходу коробки розподільної автомата заряджання, коробку пуску стрільби з гармати, яка...
Стабілізатор основного озброєння танка
Номер патенту: 81491
Опубліковано: 25.06.2013
Автор: Александрова Тетяна Євгенівна
МПК: F41G 5/00
Мітки: основного, стабілізатор, озброєння, танка
Формула / Реферат:
Стабілізатор основного озброєння танка, який містить гіроскопічний датчик кута відхилення осі каналу ствола танкової гармати від лінії прицілювання і гіроскопічний датчик кутової швидкості танкової гармати відносно осі цапф, електронний блок, що містить випростувачі вихідних сигналів гіроскопічних датчиків кута і кутової швидкості, підсилювачі випростаних сигналів і суматор, а також електрогідравлічний підсилювач, причому виходи...
Стабілізатор безпечної стрільби бойової машини піхоти з місця
Номер патенту: 25985
Опубліковано: 27.08.2007
Автори: Бокачов Сергій Вікторович, Василів Юрій Ігорович, Ковч Владислав Юрійович
МПК: F41A 17/00
Мітки: місця, бойової, стабілізатор, стрільби, безпечної, піхоти, машини
Формула / Реферат:
Стабілізатор безпечної стрільби бойової машини піхоти з місця, який містить привід горизонтального наведення, який розташований у верхньому і нижньому погонах башти, кінцевий вимикач стопора башти, який відрізняється тим, що додатково містить регулювальну планку, кутомірну шкалу, регулювальні болти, кінцеві вимикачі повороту башти, перехідну коробку, при цьому кутомірна шкала з регулювальною планкою, що встановлена на нижньому погоні башти,...
Система керування вогнем танка
Номер патенту: 51805
Опубліковано: 16.12.2002
Автори: Бондаренко Олександр Григорович, Фролов Леонід Андрійович
МПК: F41G 5/00
Мітки: система, вогнем, танка, керування
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, датчик кутового положення гармати, жорстко установлений на башті і кінематично зв'язаний з гарматою, приціл, датчик кута вертикального наведення і датчик кута горизонтального наведення, які кінематично зв'язані з прицілом і відповідно з гарматою і баштою, а датчик кута вертикального наведення електрично зв'язаний з приводом гармати, яка відрізняється тим, що в систему...
Пристрій кріплення гармати в башті
Номер патенту: 42115
Опубліковано: 15.10.2001
Автори: Дураченко Василь Васильович, Риць Олександр Романович, Куров Микола Костянтинович, Магерамов Лютфалій Курбан-Алієвич, Бусяк Юрій Митрофанович, Вакуленко Володимир Вікторович
МПК: F41A 27/00
Мітки: гармати, пристрій, кріплення, башти
Формула / Реферат:
1. Пристрій кріплення гармати в башті, що містить колиску з цапфами, установленими в підшипникових вузлах обойм, кожна з яких розміщена в циліндричній розточці амбразури башти і зафіксована за допомогою накладки з болтами та люфтовибирної деталі, який відрізняється тим, що осі циліндричних розточок паралельні вертикальній осі амбразури башти, а кожна накладка виконана у вигляді основи з виступом, який розміщений в прорізі, виконаному зовні в...
Попередній патент: Спосіб поширення інформації з застосуванням технології доповненої реальності
Наступний патент: Стабілізатор лінії прицілювання танкової гармати
Випадковий патент: Спосіб одержання сталевих виливків