Спосіб виявлення джерела звуку із використанням f-статистики фішера
Номер патенту: 106180
Опубліковано: 25.04.2016
Автори: Лящук Олександр Іванович, Толчонов Іван Вікторович, Карягін Євгеній Володимирович, Шапка Володимир Миколайович

Формула / Реферат
Спосіб виявлення джерела звуку шляхом застосування алгоритму виявлення когерентних ділянок запису (корисного сигналу) із застосуванням F-статистики Фішера, згідно з яким здійснюють одночасне виявлення сигналу та оцінку азимуту, швидкості його розповсюдження для подальшої локалізації (визначення топографічних координат) віддаленого джерела звуку і проведення його часткової ідентифікації, при цьому здійснюють суттєве збільшення характеристик виявлення, а саме просторової та часової роздільної здатності та точності оцінки азимуту, що забезпечує виявлення корисної складової, у тому числі при амплітуді, рівній амплітуді фону, а також дає можливість проводити виявлення, окрім імпульсних джерел звуку, довготривалих та безперервних джерел, у тому числі рухомих.
Текст
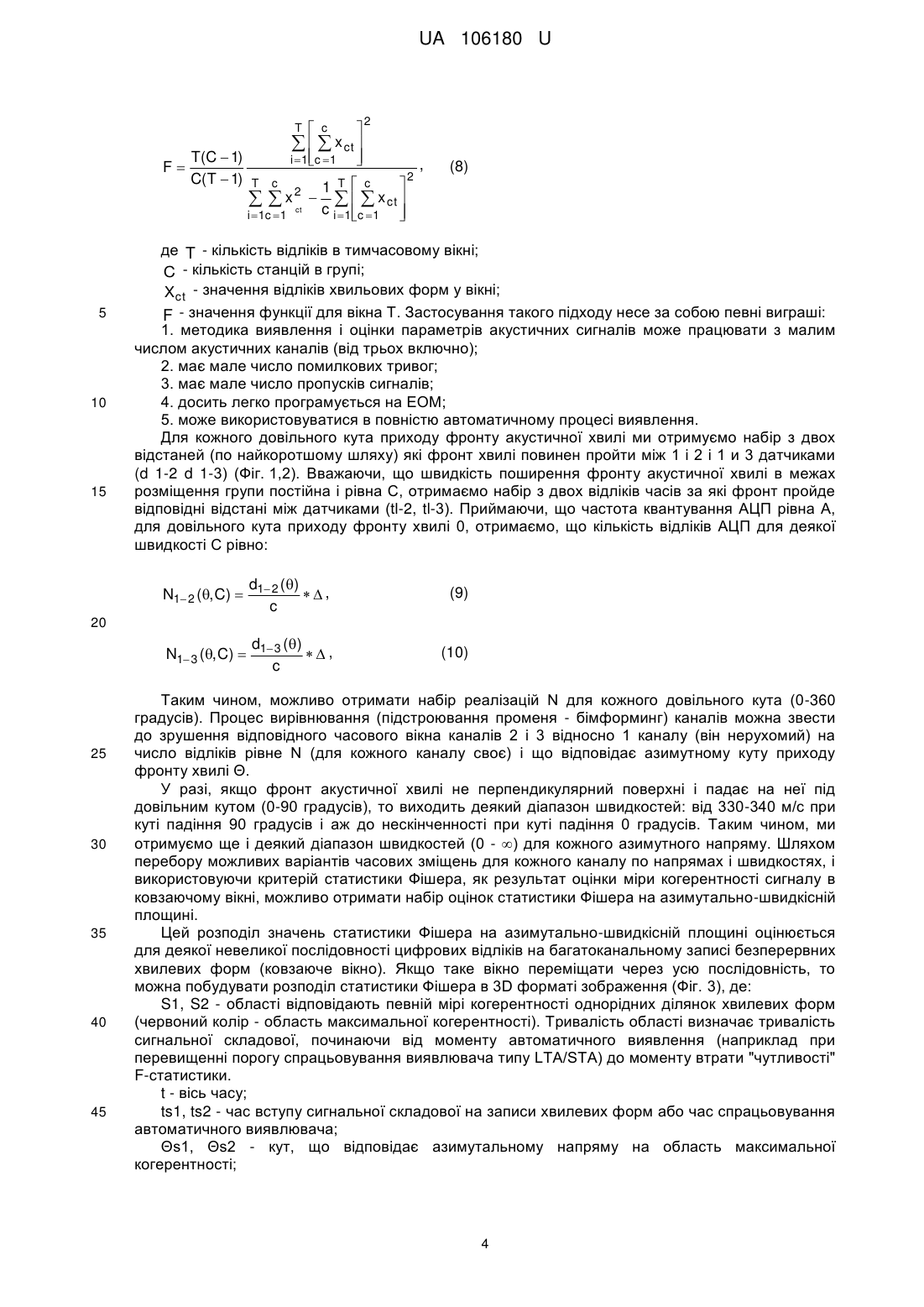
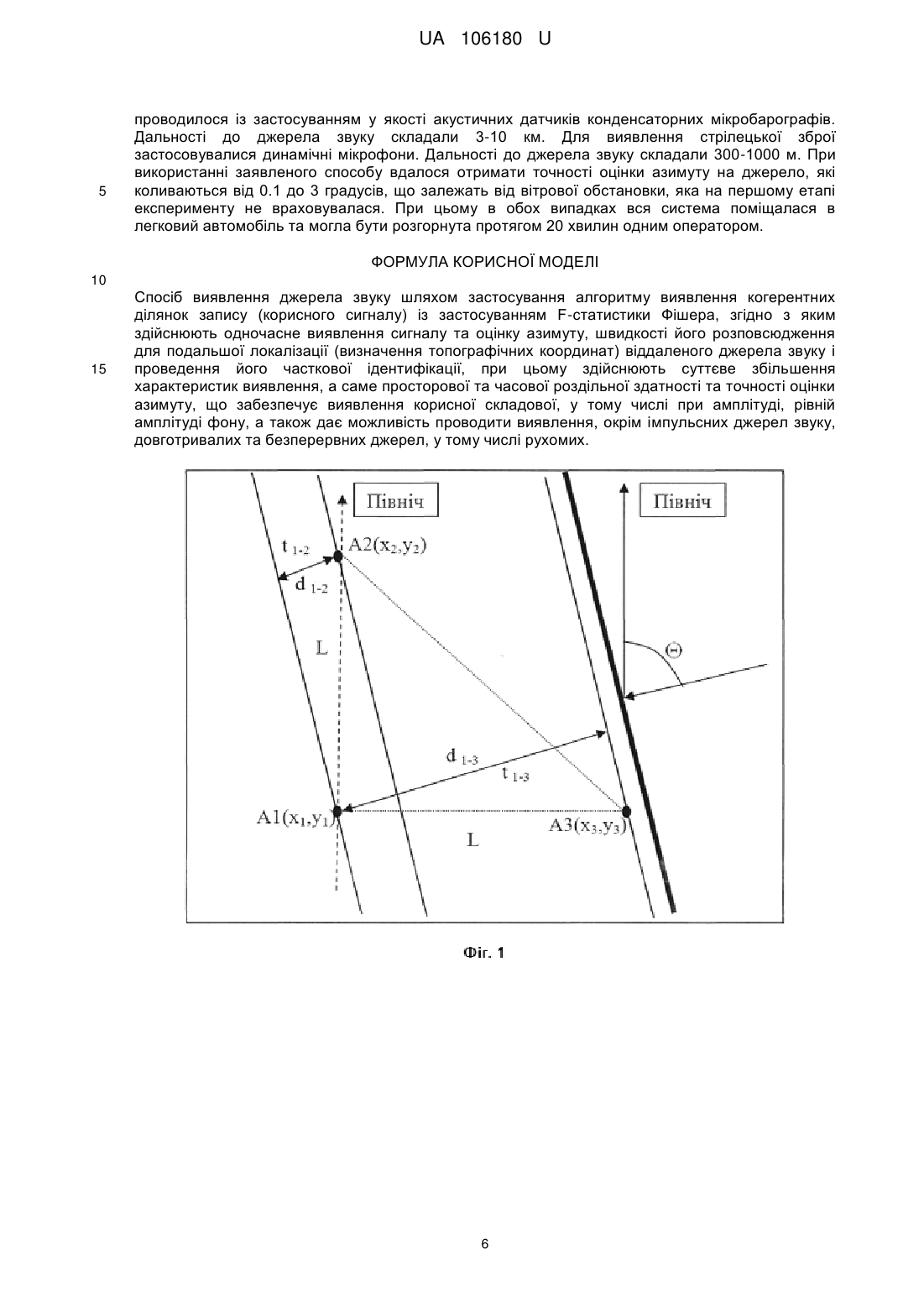
Реферат: Спосіб виявлення джерела звуку шляхом застосування алгоритму виявлення когерентних ділянок запису (корисного сигналу) із застосуванням F-статистики Фішера, згідно з яким здійснюють одночасне виявлення сигналу та оцінку азимуту, швидкості його розповсюдження для подальшої локалізації (визначення топографічних координат) віддаленого джерела звуку і проведення його часткової ідентифікації, при цьому здійснюють суттєве збільшення характеристик виявлення, а саме просторової та часової роздільної здатності та точності оцінки азимуту, що забезпечує виявлення корисної складової, у тому числі при амплітуді, рівній амплітуді фону, а також дає можливість проводити виявлення, окрім імпульсних джерел звуку, довготривалих та безперервних джерел, у тому числі рухомих. UA 106180 U (12) UA 106180 U UA 106180 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до систем безпеки для правоохоронних органів, інших служб безпеки, і може бути використаний для виявлення та локалізації (визначення топографічних координат) віддаленого джерела звуку і його грубої ідентифікації. Можливе використання системах озброєння. На даний час відомі системи і способи, за допомогою яких можна визначити напрямок на джерело імпульсного акустичного сигналу, що виникає, наприклад, у наслідок пострілу. Акустичні системи визначення пострілу (АСВП) можливо розділити на два класи в залежності від дальності реєстрації події та типу хвилі - дульної хвилі від пострілу або/та ударної хвилі від кулі або снаряду. В системах, що базуються на реєстрації звуку кулі проводиться обчислення геометрії ударної хвилі, створюваної кулею, з якої зворотним рахунком відновлюється траєкторія її польоту і точка пострілу. Серед основних поширених систем - Сова (Росія), Бумераннг, Swat, PDCue (США), Avisa (Данія). АСВП можуть бути як частиною екіпіровки бійця, так і бути встановлені на транспортних засобах (броньоавтомобілі, вертольоти) для ситуаційної обізнаності екіпажу. Середня дальність виявлення різниться від 350 до 1200 метрів (в залежності від калібру), точність наводиться зазвичай для відстані 400 м, та складає ±2°…5° для азимуту та куту місця і 10…20 % по дальності. В Україні подібні системи відсутні. Великі відстані застосовуються у системах артилерійської звукової розвідки, що базуються на виявлені дульної акустичної хвилі. Серед відомих систем, британський HALO та комплекси АЗК-5,7, "Положення-2", що стоять на озброєнні у ЗС України. Дальність розвідки складає 16-20 км для артилерії та 8 км для мінометів. Заявлена точність 0,8-1 % по дальності та азимуту на 15 км. Рознесення датчиків у системі до 6 км. Недоліком систем, що стоять на озброєнні у ЗС України є мала мобільність внаслідок громіздкої конструкції, закордонні системи мають високу ціну. Загальним недоліком є використання амплітудного детектора на вході системи, що зменшує можливості виявлення для малопотужних сигналів, мала роздільна просторова здатність. Відомий спосіб виявлення одиночних стрілків [патент США №5241518], в якому використовуються мікрофони, що можуть бути розміщені як відносно близько одне від одного, так і далеко (носиться солдатом на полі бою, або встановлений на борту бойової машини). Кожен мікрофон вимірює тиск дульної та ударної хвилі у точці його перебування. В результаті приходу на сенсори ударної хвилі стає можливим визначення напрямку на джерело сигналу, а за наявності декількох таких груп сенсорів можливо його локалізувати. При використанні трьох сенсорів стає можливим визначення куту піднесення точки виникнення ударної хвилі. Азимут на джерело сигналу по відношенню до положення датчика визначають, вимірюючи кожним датчиком час приходу ударної хвилі. Хвилі приходять в кожен сенсор в різний час, що дає змогу визначити напрямок (азимуті кут піднесення). Однак вважається, що при більшому рознесені датчиків, точність вимірювання часу, що необхідна для точного рішення задачі лише на основі інформації про ударну хвилю має бути дуже високою. При недостатній роздільній часовій здатності можуть виникати неоднозначні рішення, де часи приходу ударної хвилі до заданого набору датчиків майже тотожні для двох дзеркально симетричних точок пострілу. Невеликі похибки у визначенні часу приходу ударної та дульної можуть приводити до суттєвих помилок в оцінці дальності. Відомий і спосіб, у якому здійснюється шляхом вимірювання ударної і дульної хвиль [патент США № 2494336]. При цьому здійснюють вимірювання сигналів, що містять інформацію лише про ударну хвилю, акустичними датчиками, рознесеними в просторі так, що вони формують антену. За виміряними сигналами ударної і дульної хвиль здійснюють початкову оцінку дальності до точки пострілу. Задають початкові передбачувані значення швидкості снаряда і коефіцієнта його лобового опору, здійснюють вибір в кожному поколінні рішення, що має найменше значення нев'язки, і здійснюють ітеративне обчислення миттєвої швидкості снаряда при його русі по траєкторії для отримання оновлених значень дальності до точки пострілу. Технічний результат полягає в забезпеченні можливості однозначного визначення положення місця в умовах, коли сигнал дульної хвилі слабкий або відсутній взагалі. До недоліків способу слід віднести невеликі відстані виявлення та необхідність специфічного розташування системи, що дозволить реєструвати ударну хвилю. Відомий також і спосіб виявлення пострілу звукометричним комплексом [патент РФ 2323449], що обраний як прототип. Як і заявлений спосіб, спосіб-прототип включає групу рознесених у просторі акустичних датчиків/мікрофонів, АЦП із системою обробки сигналу, систему виміру часу та ЕОМ. Комплекс може бути використаний для визначення видалення джерела звуку від акустичного локатора, його виправленого звукометричного кута (враховано вплив швидкості, напряму вітру в приземному шарі атмосфери, температури повітря у цьому шарі на швидкість розповсюдження звуку) і топографічних координат цього джерела. Середини 1 UA 106180 U 5 10 15 20 25 30 35 лінійних груп звукоприймачів видалені по фронту один від одного на кілька сотень метрів і приблизно на кілька кілометрів від лінії бойового зіткнення військ. Система дозволяє обробляти сигнали в каналах обробки сигналу лише в певні моменти часу, що визначаються програмно. Виявлення сигналу відбувається за допомогою амплітудного детектора. Система виміру часу вимірює кількість імпульсів (з періодом повторення 1 мс) до моменту приходу імпульсного акустичного сигналу до правої та лівої лінійних груп звукоприймачів, в результаті чого в ЕОМ розраховується дальність до джерела звуку та виправлений звукометричний кут, а потім і топографічних координат джерела звуку. Результатом є підвищення перешкодозахищеності акустичного локатора. Але на відміну від заявленого способу, спосіб-прототип вимагає певного розташування комплексу у заздалегідь відомому напрямку, тому має суттєвий недолік - вузький сектор виявлення. Крім того, це приводить до значного звуження можливостей застосування комплексу. Застосування амплітудного виявлювача може привести до пропуску цілі при рівні сигналу порівнянному із рівнем шуму і унеможливлює виявлення та супровід безперервних та рухомих джерел звуку. В основу поставлено задачу вдосконалення способу виявлення джерела звуку шляхом застосування алгоритму виявлення когерентних ділянок запису (корисного сигналу) із застосуванням критерію Фішера, що забезпечить виявлення корисної складової навіть при амплітуді, рівній амплітуда фону. Додатковим результатом стає можливість проводити виявлення не лише імпульсних джерел звуку а й безперервних, до того ж стає можливим виявлення рухомих об'єктів, що генерують звук і проводити їх часткову ідентифікацію. Поставлена задача вирішується тим, що в спосіб, згідно з яким здійснюють виявлення корисного сигналу, введена нова суттєва ознака, а саме значення показника Фішера. Згідно з корисною моделлю, виявлення джерела звуку здійснюють із застосуванням групи акустичних датчиків / мікрофонів. Важливою характеристикою групи є відгук (діаграма спрямованості), що показує реакцію групи на акустичний сигнал залежно від кута його приходу. Ця реакція залежатиме від конфігурації групи (схеми розміщення датчиків на площині), лінійних розмірів групи і кількості датчиків. Внаслідок несиметричного розташування датчиків, результат відгуку буде нерівномірним для різних кутів приходу фронту акустичної хвилі. Для плоского фронту хвилі рішення можна описати наступним виразом [Машков О.А., Кирилюк В.А., Качалін І.Г., Карягін Є.В. Оцінка характеристик джерела інфразвукових коливань техногенного походження малоапертурною акустичною групою// Зб. наук. пр. ІПМЕі, Моделювання та інформаційні технології, К.:-2005 Вип. № 29 – с. 80-87; Hein Haak, Laslo Evers: Design of infrasound detection end parameter estimation systems// June-september 2003. KNMI, infrasound technology workshop, US San Diego, October 2003]: f (r, t ) e j( t kr ) e j( t pr ) , 40 (1) де: w - частота; p - повільність; - хвилеве число; r - позиційний вектор; t - різниця часу між г датчиком і опорним датчиком. Для вертикально розміщених датчиків групи, таким чином, буде знайдено рішення вирівнювання диференціальних фаз. Отже, відгук для групи з N елементів буде рівний: 45 R(, p) 50 1 N j 1e N j(prj ) 2 (2) , Відгук групи в області низьких частот моделюється в деякому просторі повільностей. Частотний спектр потужності повільності може бути вичислений шляхом підсумовування сигнальних складових на деякій багатоканальній послідовності даних. Згідно робіт проведених Smart та Flinn, у 1971 році, спектр може бути вичислений по формулі: p(, p) n A n ()e ja () e jpr N n n 2 , (3) де: N - кількість датчиків розміщених відповідно до позиційного вектору rn; 2 UA 106180 U 5 A n ()e jan () - результат перетворення Фур'є. Цю формулу можливо інтерпретувати як відгук групи на ту акустичну хвилю, що проходить через групу та когерентну в кожній точці. В даному випадку усі різниці часів вступу акустичної хвилі на конкретному датчику перетворені в частотну область за допомогою перетворення Фур'є, і підміняються фазовими зміщеннями. Результат перетворення Фур'є A n ()e ian ( ) несе наступну інформацію: eian () M 1e j0 it j - містить інформацію про фазу M числа відліків при частоті дискретизації ; A n () M1 A(t j ) - містить інформацію про сигнальну амплітуду. j 0 10 Частотний спектр потужності повільності оцінюється для усього діапазону повільностей фронту акустичної хвилі і для усього частотного діапазону. Характерна (домінуюча) частота і вектор повільності відповідатиме максимуму енергетичного спектру, що дозволяє ототожнювати джерело. Уявна швидкість визначається завдовжки P -вектору, азимут на джерело визначається відносно напряму на північ. 15 2 cos sin 2 2 P Px Py c c 20 2 1, c (4) Це співвідношення визначає зв'язок між значенням повільності фронту акустичної хвилі і відповідному їй азимутному напряму. Побудова променя (бімформінг) може здійснюватися після визначення уявної швидкості фронту акустичної хвилі і азимутного напряму. Підвищення відношення с/ш здійснюється за рахунок підсумовування добутку квадратів відліків заздалегідь вирівняних один відносно одного каналів з присутньою корисною сигнальною складовою. Автоматичне виявлення корисних сигналів в багатоканальній реалізації безперервних хвилевих форм може проводитися з використанням критерію статистики Фішера (F-статистика): 25 SF (, p) E(, p) (N 1) , E() E(, p) (5) Кількість сигнальної складової в числовій реалізації можна описати: E(, p) 30 40 2 1 N2 P(, p) , (6) Загальна енергія визначається як: E( ) 35 1 N j r j 1 A j ()e j N 2 1 N j 1 A j () , N (7) Іншими словами, значення статистичного показника Фішера - це масштабована міра сигнальної послідовності. Значення показника Фішера зростає за наявності когерентних хвилевих послідовностей в багатоканальному записі безперервних хвилевих форм. У разі наявності запису некогерентного 3 фону, значення показника буде низьким. Чисельний розрахунок значення статистики Фішера для довільного числа каналів і "вікна" що складається з довільного числа відліків, можна зробити по співвідношенню [H.W. Haak and G.J. de Wilde. Scientific report: WR 96-06 Microbarograph systems for the infrasonic detection of nuclear explosions. De Bilt 1996]: 3 UA 106180 U c x ct i 1 c 1 T F 5 10 15 T(C 1) C(T 1) T c 2 1 c x 2 c x ct ct i 1c 1 i 1 c 1 T 2 , (8) де T - кількість відліків в тимчасовому вікні; C - кількість станцій в групі; Xct - значення відліків хвильових форм у вікні; F - значення функції для вікна Т. Застосування такого підходу несе за собою певні виграші: 1. методика виявлення і оцінки параметрів акустичних сигналів може працювати з малим числом акустичних каналів (від трьох включно); 2. має мале число помилкових тривог; 3. має мале число пропусків сигналів; 4. досить легко програмується на ЕОМ; 5. може використовуватися в повністю автоматичному процесі виявлення. Для кожного довільного кута приходу фронту акустичної хвилі ми отримуємо набір з двох відстаней (по найкоротшому шляху) які фронт хвилі повинен пройти між 1 і 2 і 1 и 3 датчиками (d 1-2 d 1-3) (Фіг. 1,2). Вважаючи, що швидкість поширення фронту акустичної хвилі в межах розміщення групи постійна і рівна С, отримаємо набір з двох відліків часів за які фронт пройде відповідні відстані між датчиками (tl-2, tl-3). Приймаючи, що частота квантування АЦП рівна А, для довільного кута приходу фронту хвилі 0, отримаємо, що кількість відліків АЦП для деякої швидкості С рівно: d ( ) N1 2 ( , C) 1 2 , c (9) d ( ) N1 3 (, C) 1 3 , c (10) 20 25 30 35 40 45 Таким чином, можливо отримати набір реалізацій N для кожного довільного кута (0-360 градусів). Процес вирівнювання (підстроювання променя - бімформинг) каналів можна звести до зрушення відповідного часового вікна каналів 2 і 3 відносно 1 каналу (він нерухомий) на число відліків рівне N (для кожного каналу своє) і що відповідає азимутному куту приходу фронту хвилі Θ. У разі, якщо фронт акустичної хвилі не перпендикулярний поверхні і падає на неї під довільним кутом (0-90 градусів), то виходить деякий діапазон швидкостей: від 330-340 м/с при куті падіння 90 градусів і аж до нескінченності при куті падіння 0 градусів. Таким чином, ми отримуємо ще і деякий діапазон швидкостей (0 - ) для кожного азимутного напряму. Шляхом перебору можливих варіантів часових зміщень для кожного каналу по напрямах і швидкостях, і використовуючи критерій статистики Фішера, як результат оцінки міри когерентності сигналу в ковзаючому вікні, можливо отримати набір оцінок статистики Фішера на азимутально-швидкісній площині. Цей розподіл значень статистики Фішера на азимутально-швидкісній площині оцінюється для деякої невеликої послідовності цифрових відліків на багатоканальному записі безперервних хвилевих форм (ковзаюче вікно). Якщо таке вікно переміщати через усю послідовність, то можна побудувати розподіл статистики Фішера в 3D форматі зображення (Фіг. 3), де: S1, S2 - області відповідають певній мірі когерентності однорідних ділянок хвилевих форм (червоний колір - область максимальної когерентності). Тривалість області визначає тривалість сигнальної складової, починаючи від моменту автоматичного виявлення (наприклад при перевищенні порогу спрацьовування виявлювача типу LTA/STA) до моменту втрати "чутливості" F-статистики. t - вісь часу; ts1, ts2 - час вступу сигнальної складової на записи хвилевих форм або час спрацьовування автоматичного виявлювача; Θs1, Θs2 - кут, що відповідає азимутальному напряму на область максимальної когерентності; 4 UA 106180 U 5 10 15 20 25 30 35 40 45 50 55 60 Vs1, Vs2 - вектор швидкості, довжина якого пропорційна уявній горизонтальній фазовій швидкості проходження плоского фронту акустичної хвилі через елементи групи. Варіант розміщення чотирьох датчиків показана на Фіг. 4. Порівнюючи роздільну здатність і точність прототипу та заявленого способу, отримаємо, що заявлений спосіб забезпечує суттєве збільшення цих характеристик виявлення як імпульсного так і неперервного джерела акустичного сигналу що є технічним результатом заявленого способу. Суть пояснюється кресленнями. Перелік креслень: на Фіг. 1 представлено вигляд зверху на прихід плоского фронту акустичної хвилі з довільного напряму Θ, і його переміщення через датчики трьохелементної групи; на Фіг. 2 представлено вигляд збоку на прихід плоского фронту акустичної хвилі з довільного напряму Θ, і його переміщення через датчики трьохелементної групи. на Фіг. 3 представлено розподіл статистики Фішера в 3D форматі зображення на часовій вісі. на Фіг. 4 представлено вигляд зверху на прихід плоского фронту акустичної хвилі з довільного напряму для чотирьох елементної групи датчиків та розрахунок зміщень. на Фіг. 5 показаний алгоритм роботи виявлювача Фішера у найбільш загальному виді - на Фіг. 6 представлено результат роботи виявлювача Фішера для трьох елементів та візуалізація в 3D форматі. Заявлений спосіб здійснюють таким чином. 1. Встановлюють на місцевості декілька (не менше двох) груп акустичних датчиків/мікрофонів, при цьому кількість датчиків у групі може бути довільною не менше трьох і визначатися конкретною апаратурною реалізацією АЦП та ЕОМ, що у свою чергу визначатиме швидкодію. Відстань між датчиками та між групами датчиків визначається конкретною задачею, яку необхідно визначити у дійсний час. В залежності від шуканих джерел акустичного випромінювання тип акустичних датчиків / мікрофонів може змінюватися. 2. Отримані після АЦП безперервні цифрові потокові дані надходять до виявлювача, де у заданих інтервалах швидкостей та азимутів із встановленим кроком обробляються у часовому вікні встановленої тривалості (Фіг. 5). Результатом роботи виявлювача є сигнал виявлення із розрахованими параметрами азимуту та швидкості, або його відсутність (Фіг. 6). 3. Виявлення може здійснюватися у декілька етапів для зменшення навантаження на процесор. На першому етапі здійснюється грубе сканування азимуту через декілька градусів і з визначеною завчасно швидкістю, що відповідає навколишній температурі. Можливе також встановлення сектору спостереження. При виявленні сигналу він надходить у буфер, де проводиться повторне виявлення сигналу із визначенням його точних параметрів. Основний сигнальний потік тим часом оброблюється встановленим порядком. Кількість буферів може бути довільною і на практиці визначається можливостями обчислювальної техніки. 4. За необхідності, за рахунок того, що можна встановити низьке порогове значення, можливо в одному часовому вікні отримати відразу декілька значень показника Фішера і розділити сигнали за азимутом, швидкістю та частотою, тим самим проводити виявлення імпульсних сигналів, сигналів із плавним зростанням і спаданням амплітуди, неперервних сигналів довільної тривалості. Додатковою перевагою такого рішення є одночасний супровід декількох цілей, як то один-декілька імпульсних джерел звуку з одного/різних напрямків, одиндекілька імпульсних джерел звуку з одного/різних напрямків та переміщення одного/групи механізованих засобів. 5. Належність сигналу до одного джерела у декількох групах визначається за встановленими часовими інтервалами, та азимутами на джерело сигналу. 6.Визначення координат здійснюється відомими способами (наприклад, кутомірним) і може визначатися як окремим спеціалізованим програмним модулем, так і з залученням ПС-сервісів. 7. Груба ідентифікація джерела акустичного сигналу здійснюється після роботи виявлювача по визначеній швидкості, тривалості сигналу (спрацювань показника Фішера), зміні азимуту сигналу. Можливе використання бібліотеки сигналів для порівняння. 8. Результати роботи виявлювача можуть бути передані для прийняття адекватної відповіді як по дротовим так і радіоканалам. Система може використовуватися у складі автоматизованого комплексу. Реалізація заявленого способу може бути здійснена шляхом створення виробу для виявлення джерела звуку. Модернізація засобів недоцільна у зв'язку із апаратурним виконанням існуючих на озброєнні систем. Апробація способу здійснювалась шляхом математичного та програмного моделювання а також експериментальних досліджень. Випробування алгоритму для виявлення артилерії 5 UA 106180 U 5 проводилося із застосуванням у якості акустичних датчиків конденсаторних мікробарографів. Дальності до джерела звуку складали 3-10 км. Для виявлення стрілецької зброї застосовувалися динамічні мікрофони. Дальності до джерела звуку складали 300-1000 м. При використанні заявленого способу вдалося отримати точності оцінки азимуту на джерело, які коливаються від 0.1 до 3 градусів, що залежать від вітрової обстановки, яка на першому етапі експерименту не враховувалася. При цьому в обох випадках вся система поміщалася в легковий автомобіль та могла бути розгорнута протягом 20 хвилин одним оператором. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Спосіб виявлення джерела звуку шляхом застосування алгоритму виявлення когерентних ділянок запису (корисного сигналу) із застосуванням F-статистики Фішера, згідно з яким здійснюють одночасне виявлення сигналу та оцінку азимуту, швидкості його розповсюдження для подальшої локалізації (визначення топографічних координат) віддаленого джерела звуку і проведення його часткової ідентифікації, при цьому здійснюють суттєве збільшення характеристик виявлення, а саме просторової та часової роздільної здатності та точності оцінки азимуту, що забезпечує виявлення корисної складової, у тому числі при амплітуді, рівній амплітуді фону, а також дає можливість проводити виявлення, окрім імпульсних джерел звуку, довготривалих та безперервних джерел, у тому числі рухомих. 6 UA 106180 U 7 UA 106180 U 8 UA 106180 U 9 UA 106180 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюA method for detecting a sound source using fishers f-statistics
Автори англійськоюTolchonov Ivan Viktorovych, Shapka Volodymyr Mykolaiovych, Liaschuk Oleksandr Ivahovych, Kariagin Yevhenii Volodymyrovych
Назва патенту російськоюСпособ обнаружения источника звука с использованием f-статистики фишера
Автори російськоюТолчонов Иван Викторович, Шапка Владимир Николаевич, Лящук Александр Иванович, Карягин Евгений Владимирович
МПК / Мітки
МПК: G01S 3/808, G01S 5/20
Мітки: виявлення, джерела, f-статистики, звуку, спосіб, використанням, фішера
Код посилання
<a href="https://ua.patents.su/12-106180-sposib-viyavlennya-dzherela-zvuku-iz-vikoristannyam-f-statistiki-fishera.html" target="_blank" rel="follow" title="База патентів України">Спосіб виявлення джерела звуку із використанням f-статистики фішера</a>
Спосіб визначення інтенсивності звуку на поверхні джерела шуму
Номер патенту: 44177
Опубліковано: 25.09.2009
Автор: Гузь Борис Олександрович
МПК: G01H 1/00
Мітки: визначення, інтенсивності, спосіб, звуку, джерела, поверхні, шуму
Формула / Реферат:
Спосіб визначення інтенсивності звуку на поверхні джерела шуму, що включає вимірювання звукового тиску приймачем звуку і швидкості коливань приймачем віброшвидкості, встановленим на поверхні джерела, який відрізняється тим, що звуковий тиск визначають безпосередньо на поверхні джерела шуму, а приймач звуку ізолюють від дії шуму сторонніх джерел, для чого приймач звуку встановлюють на кінці вузької труби, перпендикулярної до поверхні джерела...
Спосіб визначення інтенсивності звуку на поверхні джерела шуму
Номер патенту: 57886
Опубліковано: 10.03.2011
Автор: Гузь Борис Олександрович
МПК: G01H 1/12, G01H 17/00
Мітки: джерела, інтенсивності, спосіб, визначення, шуму, поверхні, звуку
Формула / Реферат:
Спосіб визначення інтенсивності звуку на поверхні джерела шуму, що включає вимірювання швидкості коливань приймачем віброшвидкості, встановленим на поверхні джерела, і визначення звукового тиску безпосередньо на поверхні джерела шуму двома приймачами звуку, ізольованими від дії шуму сторонніх джерел, для чого приймачі встановлені у вузьких трубах, перпендикулярних до поверхні джерела шуму, інші кінці яких з'єднані з поверхнею джерела, який...
Спосіб пасивної звуколокації нестаціонарного джерела звуку
Номер патенту: 65809
Опубліковано: 15.04.2004
Автор: Степанченко Сергій Іванович
МПК: G01S 3/00
Мітки: звуку, спосіб, нестаціонарного, пасивної, звуколокації, джерела
Формула / Реферат:
Спосіб пасивної звуколокації нестаціонарного джерела звуку, згідно з яким визначають наявність сигналу від джерела звуку у точках прийому по перевищенню рівнем сигналу, що приймається, відомої заданої величини, сигнал приймають та реєструють у парах просторово рознесених точок з відомими координатами, кількість пар точок прийому сигналу встановлюють не менше розмірності системи координат, що використовується для відображення розташування...
Регулювання посилення звуку з використанням основаного на конкретній гучності виявлення акустичних подій
Номер патенту: 93243
Опубліковано: 25.01.2011
Автори: Сіфельдт Алан Джеффрі, Крокетт Бретт Грехем
Мітки: виявлення, основаного, гучності, акустичних, звуку, конкретній, використанням, посилення, регулювання, подій
Формула / Реферат:
1. Спосіб зміни параметра динамічної обробки звукового сигналу, який включає етапи, на яких:виявляють зміни спектральних характеристик з часом в звуковому сигналі,ідентифікують, що границі акустичної події змінюються сильніше, ніж порогова величина в спектральних характеристиках з часом у згаданому звуковому сигналі, причому звуковий сегмент між послідовними границями становить акустичну подію, генерують керуючий сигнал,...
Пристрій формуванням уявного джерела звуку
Номер патенту: 103112
Опубліковано: 10.12.2015
Автор: Назаровець Михайло Єгорович
МПК: G10K 11/00, G10K 15/00
Мітки: уявного, джерела, формуванням, пристрій, звуку
Формула / Реферат:
Пристрій формування уявного джерела звуку має у своєму складі такі конструктивні елементи: генератор, що має прямий зв'язок з формувачем кодів та зворотний зв'язок з регулятором швидкості уявного джерела звуку; формувач кодів, що має прямі зв'язки з формувачем сигналів дозволу, комутатором сигналів дозволу та формувачем сигналів управління; формувач сигналів дозволу, що має прямі зв'язки з інверторами; регулятор швидкості уявного джерела...
Попередній патент: Універсальна корморізка
Наступний патент: Спосіб випробувань на контактну витривалість при коченні з проковзуванням
Випадковий патент: Спосіб отримання 5-алкілозаміщених 4,5,6,7-тетрагідро-1,2,4-триазоло[1,5-а]піримідин-5-тіонів