Гідролокатор для пошуку прісноводних джерел в морі
Номер патенту: 106684
Опубліковано: 25.09.2014
Автори: Клочан Юрій Анатолійович, Голод Олег Саулович, Клочан Валентина Іванівна, Федосеєнков Сергій Геннадійович, Шличек Любов Іванівна, Гончар Анатолій Іванович
Формула / Реферат
Гідролокатор, який містить передавальну антену, передавальний тракт, перший подільник частоти, генератор тактових імпульсів, першу приймальну антену і пристрій відображення інформації, причому вхід передавальної антени з'єднаний з першим виходом передавального тракту, вхід передавального тракту з'єднаний з виходом першого подільника частоти, а вхід першого подільника з'єднаний з виходом генератора тактових імпульсів, вихід першого подільника також з'єднаний з першим входом пристрою відображення інформації, який відрізняється тим, що у нього введені: перший підсилювач-обмежувач, перший фазовий детектор, селектор стрибків напруги, аналого-цифровий перетворювач, реверсивний лічильник, обчислювач, друга приймальна антена, другий підсилювач-обмежувач, фіксатор нулів, другий подільник частоти, генератор із зовнішнім керуванням фази сигналів, другий фазовий детектор, фазообертач p/2, третій фазовий детектор і пороговий пристрій, причому другий вихід передавального тракту з'єднаний з першим входом другого подільника частоти, вихід генератора тактових імпульсів з'єднаний також з другим входом аналого-цифрового перетворювача і другим входом реверсивного лічильника, перша приймальна антена з'єднана з входом першого підсилювача обмежувача, вихід першого підсилювача обмежувача з'єднаний з входом першого фазового детектора, вихід першого фазового детектора з'єднаний з входом селектора стрибків напруги і першим входом аналого-цифрового перетворювача, вихід селектора стрибків напруги з'єднаний з першим входом реверсивного лічильника, третій вхід реверсивного лічильника з'єднаний з виходом першого подільника частоти, вихід реверсивного лічильника з'єднаний з першим входом обчислювача, другий вхід обчислювача з'єднаний з виходом аналого-цифрового перетворювача, третій вхід обчислювача з'єднаний з виходом першого подільника частоти, четвертий вхід обчислювача з'єднаний з виходом порогового пристрою, п'ятий вхід обчислювача з'єднаний з виходом третього фазового детектора, вихід обчислювача з'єднаний з другим входом пристрою відображення інформації, друга приймальна антена з'єднана з входом другого підсилювача обмежувача, вихід якого з'єднаний з другим входом другого фазового детектора, з другим входом третього фазового детектора, з другим входом першого фазового детектора і входом фіксатора нулів, вихід фіксатора нулів з'єднаний з другим входом другого подільника частоти, вихід другого подільника частоти з'єднаний з входом генератора із зовнішнім керуванням фази сигналів, перший вихід якого з'єднаний з першим входом другого фазового детектора і входом фазообертача p/2, другий вихід генератора із зовнішнім керуванням фази сигналів з'єднаний з другим входом передавального тракту, вихід другого фазового детектора з'єднаний з входом порогового пристрою, а вхід 3-го фазового детектора з'єднано з фазообертачем p/2.
Текст
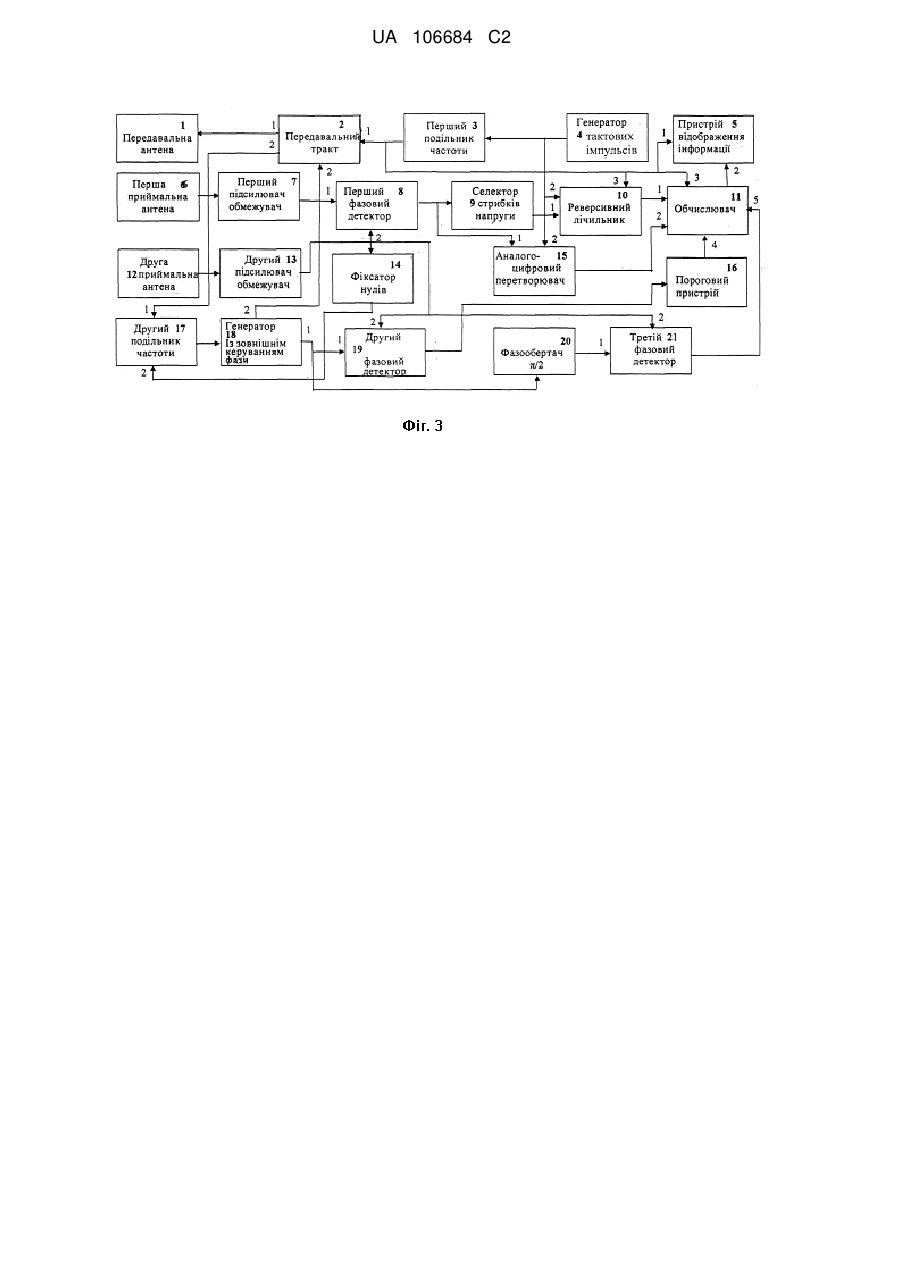
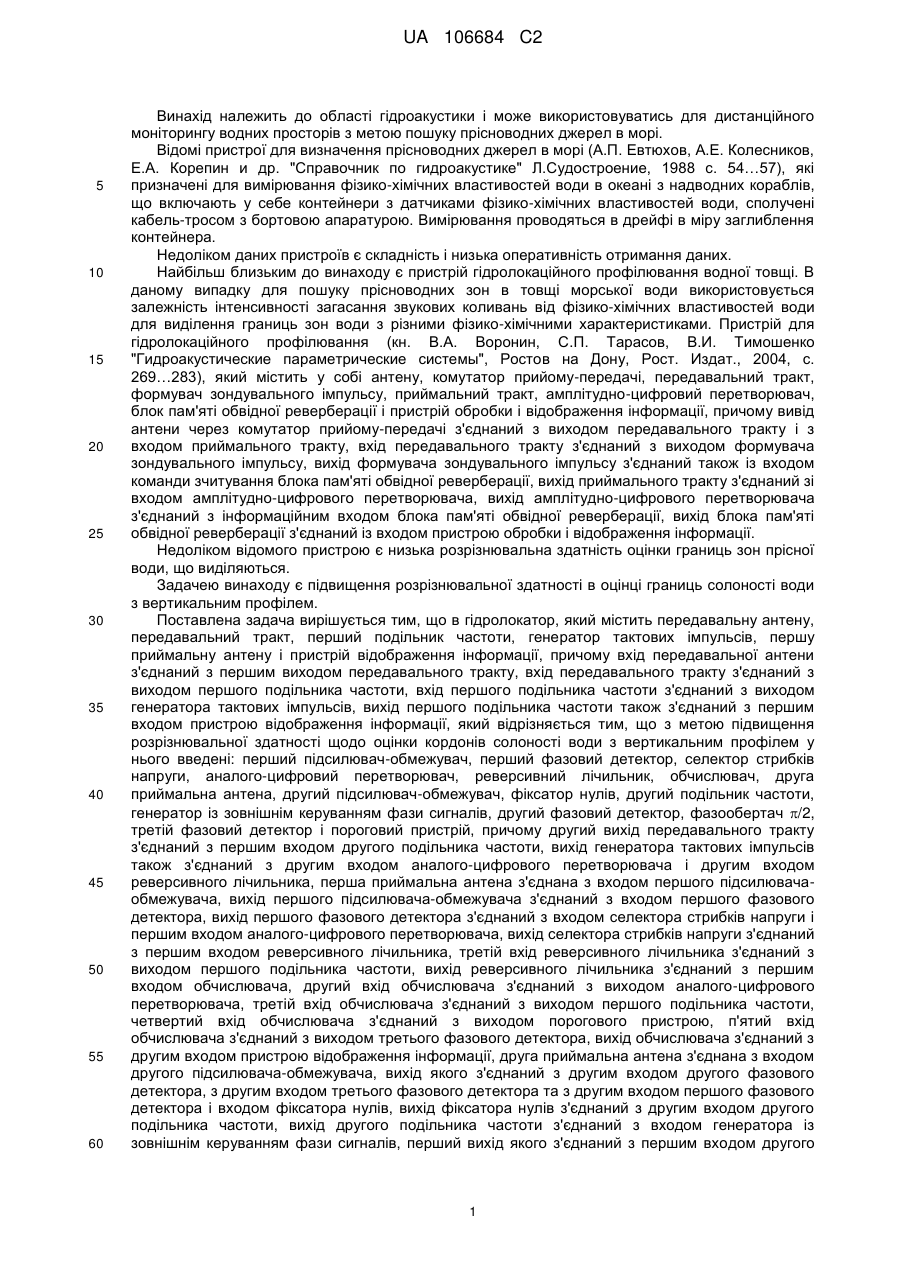
Реферат: Винахід належить до гідроакустики і може використовуватись для дистанційного моніторингу водних просторів з метою пошуку прісноводних джерел в морі. Гідролокатор містить передавальну антену, передавальний тракт, перший подільник частоти, генератор тактових імпульсів, першу приймальну антену і пристрій відображення інформації. Згідно з винаходом, у нього введені: перший підсилювач-обмежувач, перший фазовий детектор, селектор стрибків напруги, аналого-цифровий перетворювач, реверсивний лічильник, обчислювач, друга приймальна антена, другий підсилювач-обмежувач, фіксатор нулів, другий подільник частоти, генератор із зовнішнім керуванням фази сигналів, другий фазовий детектор, фазообертач /2, третій фазовий детектор і пороговий пристрій. Винахід забезпечує підвищення розрізнювальної здатності оцінки границь солоності води з вертикальним профілем гідролокатора за рахунок забезпечення можливості оцінки розсіюючих властивостей дна. UA 106684 C2 (12) UA 106684 C2 UA 106684 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області гідроакустики і може використовуватись для дистанційного моніторингу водних просторів з метою пошуку прісноводних джерел в морі. Відомі пристрої для визначення прісноводних джерел в морі (А.П. Евтюхов, А.Е. Колесников, Е.А. Корепин и др. "Справочник по гидроакустике" Л.Судостроение, 1988 с. 54…57), які призначені для вимірювання фізико-хімічних властивостей води в океані з надводних кораблів, що включають у себе контейнери з датчиками фізико-хімічних властивостей води, сполучені кабель-тросом з бортовою апаратурою. Вимірювання проводяться в дрейфі в міру заглиблення контейнера. Недоліком даних пристроїв є складність і низька оперативність отримання даних. Найбільш близьким до винаходу є пристрій гідролокаційного профілювання водної товщі. В даному випадку для пошуку прісноводних зон в товщі морської води використовується залежність інтенсивності загасання звукових коливань від фізико-хімічних властивостей води для виділення границь зон води з різними фізико-хімічними характеристиками. Пристрій для гідролокаційного профілювання (кн. В.А. Воронин, С.П. Тарасов, В.И. Тимошенко "Гидроакустические параметрические системы", Ростов на Дону, Рост. Издат., 2004, с. 269…283), який містить у собі антену, комутатор прийому-передачі, передавальний тракт, формувач зондувального імпульсу, приймальний тракт, амплітудно-цифровий перетворювач, блок пам'яті обвідної реверберації і пристрій обробки і відображення інформації, причому вивід антени через комутатор прийому-передачі з'єднаний з виходом передавального тракту і з входом приймального тракту, вхід передавального тракту з'єднаний з виходом формувача зондувального імпульсу, вихід формувача зондувального імпульсу з'єднаний також із входом команди зчитування блока пам'яті обвідної реверберації, вихід приймального тракту з'єднаний зі входом амплітудно-цифрового перетворювача, вихід амплітудно-цифрового перетворювача з'єднаний з інформаційним входом блока пам'яті обвідної реверберації, вихід блока пам'яті обвідної реверберації з'єднаний із входом пристрою обробки і відображення інформації. Недоліком відомого пристрою є низька розрізнювальна здатність оцінки границь зон прісної води, що виділяються. Задачею винаходу є підвищення розрізнювальної здатності в оцінці границь солоності води з вертикальним профілем. Поставлена задача вирішується тим, що в гідролокатор, який містить передавальну антену, передавальний тракт, перший подільник частоти, генератор тактових імпульсів, першу приймальну антену і пристрій відображення інформації, причому вхід передавальної антени з'єднаний з першим виходом передавального тракту, вхід передавального тракту з'єднаний з виходом першого подільника частоти, вхід першого подільника частоти з'єднаний з виходом генератора тактових імпульсів, вихід першого подільника частоти також з'єднаний з першим входом пристрою відображення інформації, який відрізняється тим, що з метою підвищення розрізнювальної здатності щодо оцінки кордонів солоності води з вертикальним профілем у нього введені: перший підсилювач-обмежувач, перший фазовий детектор, селектор стрибків напруги, аналого-цифровий перетворювач, реверсивний лічильник, обчислювач, друга приймальна антена, другий підсилювач-обмежувач, фіксатор нулів, другий подільник частоти, генератор із зовнішнім керуванням фази сигналів, другий фазовий детектор, фазообертач /2, третій фазовий детектор і пороговий пристрій, причому другий вихід передавального тракту з'єднаний з першим входом другого подільника частоти, вихід генератора тактових імпульсів також з'єднаний з другим входом аналого-цифрового перетворювача і другим входом реверсивного лічильника, перша приймальна антена з'єднана з входом першого підсилювачаобмежувача, вихід першого підсилювача-обмежувача з'єднаний з входом першого фазового детектора, вихід першого фазового детектора з'єднаний з входом селектора стрибків напруги і першим входом аналого-цифрового перетворювача, вихід селектора стрибків напруги з'єднаний з першим входом реверсивного лічильника, третій вхід реверсивного лічильника з'єднаний з виходом першого подільника частоти, вихід реверсивного лічильника з'єднаний з першим входом обчислювача, другий вхід обчислювача з'єднаний з виходом аналого-цифрового перетворювача, третій вхід обчислювача з'єднаний з виходом першого подільника частоти, четвертий вхід обчислювача з'єднаний з виходом порогового пристрою, п'ятий вхід обчислювача з'єднаний з виходом третього фазового детектора, вихід обчислювача з'єднаний з другим входом пристрою відображення інформації, друга приймальна антена з'єднана з входом другого підсилювача-обмежувача, вихід якого з'єднаний з другим входом другого фазового детектора, з другим входом третього фазового детектора та з другим входом першого фазового детектора і входом фіксатора нулів, вихід фіксатора нулів з'єднаний з другим входом другого подільника частоти, вихід другого подільника частоти з'єднаний з входом генератора із зовнішнім керуванням фази сигналів, перший вихід якого з'єднаний з першим входом другого 1 UA 106684 C2 5 10 15 20 фазового детектора і входом фазообертача /2, другий вихід генератора, що фазується, з'єднаний з другим входом передавального тракту, вихід другого фазового детектора з'єднаний з входом порогового пристрою. Розглянемо фізичні ознаки, які дозволяють виявити джерела прісної води в морі гідроакустичними засобами. Основний параметр, що відрізняє прісну воду від морської - це швидкість поширення звуку. В залежності від інтенсивності прісноводного джерела, розташованого на дні моря і від глибини джерела, прісна вода може утворювати або "колодязі" прісної води, що досягають поверхні моря, або придонні "лінзи" прісної води, які поступово переходять в солону морську воду. Тому гідролокатор повинен визначати і реєструвати зміни швидкості поширення звуку, як у функції глибини, так і уздовж лінії шляху. Крім того в "колодязі" є сильна течія від дна до поверхні води, тому необхідно визначати гідролокатором цю вертикальну складову швидкості течії. Геометричне співвідношення задачі пояснюється (Фіг. 4) А1 - передавальна антена, гострий промінь якої орієнтований вниз А1. На відстані L за горизонталлю від нього знаходяться приймальні антени А2, A3, відстань між якими дорівнює l к , де: - довжина хвилі сигналу, який випромінюється передавальною антеною А1. Антени А2, A3 здійснюють фазову інтерференційну пеленгацію джерела об'ємної реверберації, що виникає при випромінюванні короткого імпульсу антеною А1. Нехай у момент часу t 0 0 випромінюється короткий гідроакустичний імпульс, у міру поширення імпульсу в глибину буде виникати сигнал об'ємної реверберації і прийматися антенами А2 і A3. Фазовий зсув між сигналами на виходах антен А2, A3 дорівнює d l 2K cos , де: K , - пеленг ревербераційного сигналу відносно горизонту. Шлях RB , який пройшов сигнал до моменту часу t B , відносно моменту випромінювання 2 25 зондувального імпульсу, що відповідає пеленгації об'ємної реверберації в точці B , розташованої на глибині HB , дорівнює A1B BE Ltg B L RB , відповідно час приходу cos B 1 L tg B cos B сигналу t B з глибини HB є t B CB усереднена за глибиною від 0 до HB . 30 , де C - швидкість поширення звуку, B Розіб'ємо глибину до дна на ряд шарів HB , товщина кожного шару H Hi Hi1 C де тривалість зондувального імпульсу. Час приходу сигналу t i1 , від точки Bi1 , відносно моменту випромінювання зондувального імпульсу дорівнює 1 L tg i1 cos i1 (1) t i1 Ci1 Шлях через точку B i є Ri A1Bi1 FE Bi1Bi Bi BiF . Але відрізки A1Bi1 і FE відповідають шарам, за якими проходить сигнал зі швидкістю Ci1 , а відрізки Bi1Bi и BiF лежать в шарі, де 35 швидкість Ci Ci1 Ci . Позначимо X A1Bi1 FE - шлях через усі вищерозміщені шари по (i-1) шар, де середня швидкість звуку дорівнює Ci1 . Позначимо Y Bi1Bi BiF - шлях тільки через шар (і), де швидкість звуку Ci Ci1 Ci . Тоді час t i проходження сигналом траєкторії A1BiE X Y . (2) Ci1 Ci1 Ci Звідки отримаємо ti 40 Ci X Y t i Ci1 , (3) X ti Ci1 2 UA 106684 C2 де X Ltg i1 1 1 , Y L( tg i tg i1 ) 1 1 . sin i sin i Таким чином, якщо через однакові проміжки часу t брати відліки кута візування i , джерела об'ємної реверберації, то із співвідношення (3) можна визначити зміну швидкості поширення звуку Ci у і-ому шарі відносно швидкості звуку Ci1 в вищерозміщених шарах. 5 10 15 20 25 30 35 40 45 50 55 Швидкість поширення звуку C 0 у приповерхневому шарі визначається часом проходження сигналом ділянки L , тобто C0 L l / 2 , де t1 - час появи першого, після випромінювання t1 зондувального імпульсу, сигналу на антені А2. Обчислюючи швидкість звуку послідовно від шару C 0 до шару C i , можна побудувати залежність швидкості звуку в функції глибини. При зменшенні швидкості звуку в придонній області виявляється джерело прісної води в тому випадку, якщо утворюється придонна "лінза" прісної води. Виявлення "колодязя" прісної води здійснюється при збігу двох ознак: - наявність вертикального градієнта швидкості течії, - за різкої зміни C 0 уздовж лінії шляху судна. Основна перевага описаного методу порівняно з відомими методами визначення вертикального профілю швидкості звуку (патент РФ № 2456554 "Способ измерения распределения скорости звука в жидкой среде", патент РФ № 23319116 "Устройство для измерения вертикального распределения скорости звука в жидких средах"), полягає в підвищенні розрізнювальної здатності вимірювання приростів швидкості звуку за вертикаллю, оскільки розрізнювальна здатність пропонованого гідролокатора визначається тривалістю зондувального імпульсу, а не шириною променя приймальної антени в багатопроменевій системі, як у прототипі, тобто описаний спосіб дозволяє отримати більшу кількість статистичних незалежних відліків швидкості звуку в функції глибини і більш детально відобразити придонну область з прісною водою. Фіг. 1 - структурна схема вимірювача, аналог; Фіг. 2 - структурна схема гідролокатора, прототип; Фіг. 3 - структурна схема пропонованого гідролокатора; Фіг. 4 - геометричні співвідношення задачі; Фіг. 5 - напруга на виході фазового детектора; Фіг.6 - відрізки гармонічної напруги Гідролокатор, що заявляється, містить: передавальну антену 1, передавальний тракт 2, перший подільник частоти 3, генератор тактових імпульсів 4, пристрій відображення інформації 5, першу приймальну антену 6, перший підсилювач-обмежувач 7, перший фазовий детектор 8, селектор стрибків напруги 9, реверсивний лічильник 10, обчислювач 11, другу приймальну антену 12, другий підсилювач-обмежувач 13, фіксатор 14, аналого-цифровий перетворювач 15, пороговий пристрій 16, другий подільник частоти 17, генератор із зовнішнім керуванням фази сигналів 18, другий фазовий детектор 19, фазообертач / 2 20, третій фазовий детектор 21, причому вихід генератора тактових імпульсів 4 з'єднаний із входом першого подільника частоти 3, другим входом реверсивного лічильника 10 і другим входом аналого-цифрового перетворювача 15, вихід першого подільника частоти 3 з'єднаний з першим входом передавального тракту 2, третім входом реверсивного лічильника 10, третім входом обчислювача 11 і першим входом пристрою відображення інформації 5, перший вихід передавального тракту 2 з'єднаний з входом передавальної антени 1, другий вихід передавального тракту 2 з'єднаний з першим входом другого дільника частоти 17, другий вхід передавального тракту 2 з'єднаний з другим виходом генератора із зовнішнім керуванням фази сигналів 18, перша приймальна антена 6 виходом з'єднана через перший підсилювачобмежувач 7 з входом першого фазового детектора 8, вихід першого фазового детектора 8 з'єднаний з входом селектора стрибків напруги 9 і першим входом аналого-цифрового перетворювача 15, вихід селектора стрибків напруги 9 з'єднаний з першим входом реверсивного лічильника 10, вихід реверсивного лічильника 10 з'єднаний з першим входом обчислювача 11, другий вхід обчислювача 11 з'єднаний з виходом аналого-цифрового перетворювача 15, друга приймальна антена 12 з'єднана зі входом другого підсилювача обмежувача 13, у свою чергу вихід другого підсилювача-обмежувача 13 з'єднаний з другим входом першого фазового детектора 8, з другим входом фіксатора нулів 14, з другим входом другого фазового детектора 19 і другим входом третього фазового детектора 21, вихід 3 UA 106684 C2 5 10 15 20 25 30 35 40 45 50 55 фіксатора нулів 14 з'єднаний з другим входом другого подільника частоти 17, вихід якого у свою чергу з'єднаний з входом генератора із зовнішнім керуванням фази сигналів 18, перший вихід генератора із зовнішнім керуванням фази сигналів 18 з'єднаний з першим входом другого фазового детектора 19 і входом фазообертача / 2 , вихід другого фазового детектора 19 з'єднаний з входом порогового пристрою 16, вихід фазообертача / 2 з'єднаний з першим входом третього фазового детектора 21, вихід якого з'єднаний з п'ятим входом обчислювача 11, четвертий вхід обчислювача 11 з'єднаний з виходом порогового пристрою 16 і нарешті, вихід обчислювача 11 з'єднаний з другим входом пристрою відображення інформації 5. Передавальна антена 1 - гідроакустична передавальна антена з широкою (40-60)° характеристикою направленості в одній площині і вузькою (1-2)° характеристикою направленості в іншій площини, орієнтованими у напрямку дна і в бік від судна. Передавальний тракт 2 - містить передокінцеві та кінцеві каскади посилення зондувальних імпульсів. Перший подільник частоти 3, другий подільник частоти 17 - цифрові пристрої, що зменшують частоту вхідного сигналу у вказану кількість разів. Генератор тактових імпульсів 4 - пристрій, призначений для вироблення тактових імпульсів, які керують роботою пристрою відображення інформації 5, реверсивного лічильника 10, аналого-цифрового перетворювача 15, передавального тракту і обчислювача 11. Перша приймальна антена 6 і друга приймальна антена 12 - гідроакустичні приймальні антени, призначені для прийому гідроакустичних сигналів. Перший підсилювач-обмежувач 7 і другий підсилювач-обмежувач 13 - виконують типову задачу з частотної селекції, посилення і обмеження амплітуди ревербераційних сигналів. Перший фазовий детектор 8, другий фазовий детектор 19 і третій фазовий детектор 21 пристрої для визначення фазових зміщень вхідних сигналів. Селектор стрибків напруги 9 - пристрій, що забезпечує селекцію сигналів зі стрибків амплітуд вхідних сигналів. Обчислювач 11 - програмно-цифровий пристрій, що реалізує обчислення заданого алгоритму. Аналого-цифровий перетворювач 15 - пристрій, що здійснює перетворення обвідної ревербераційного процесу, що безперервно змінюється, в цифровий код. Реверсивний лічильник 10 - лічильник фіксованих значень реалізацій з реверсивною функцією. Пристрій відображення інформації 5 - пристрій відображення службової та гідроакустичної інформації. Фіксатор нулів 14 - електронний пристрій, що фіксує моменти переходу сигналу через нульове значення. Генератор із зовнішнім керуванням фази сигналів 18 - генератор сигналів із зовнішнім керуванням фази сигналів. Фазообертач / 2 20 - пристрій для зміни фази сигналу, що проходить через нього. Пороговий пристрій 16 - пристрій, що фіксує момент перевищення вхідними сигналами заданого порогу. Гідролокатор, що заявляється, працює у такий спосіб: передавальний тракт 2 за першим виходом виробляє короткий імпульс на несучій частоті Г 2fГ тривалістю u , який надходить на передавальну антену 1 і випромінюється у воду за променем, вузьким у поперечному напрямку судна-носія і орієнтованим вертикально вниз. Сигнал об'ємної реверберації, що виникає в товщі води при поширенні гідроакустичного імпульсу, приймається першою приймальною антеною 6 і другою приймальною антеною 12. Сигнали посилені першим підсилювачем-обмежувачем 7 надходять на вхід селектора стрибків напруги 9 і перший вхід аналого-цифрового перетворювача 15. Сигнали посилені другим підсилювачем-обмежувачем 13 надходять на другий вхід першого фазового детектора 8, до складу якого входить фільтр нижніх частот. Перший фазовий детектор 8 має лінійну амплітудну характеристику, тобто вихідна напруга фазового детектора UФД K при, 2 де 2 , l - відстань за горизонталлю між антенами 6 і 12, - довжина хвилі гідроакустичного сигналу, що випромінюється. При рівності фазового зсуву цілого числа періодів гідроакустичного сигналу, тобто коли ( t ) 2n , де n послідовно в часі, може приймати значення n K; K 1 K 2;... 0, напруга на ; виході фазового детектора стрибком змінюється від мінімального до максимального значення. При розповсюдженні гідроакустичного імпульсу вниз за променем напруга на виході фазового детектора 8 матиме вигляд, представлений на Фіг. 5. 4 UA 106684 C2 Ці стрибки напруги виділяються селектором стрибків напруги 9 і надходять на перший вхід реверсивного лічильника 10. Оскільки кожен стрибок напруги відповідає зсуву на 2 , підрахувавши кількість стрибків n , визначаємо фазові зсуви в моменти часу t n , як n 2n , де n - кількість стрибків, записана до моменту t n реверсивним лічильником 10. 5 Для визначення фазового зсуву i' в довільний тактовий момент часу t i' до виходу першого фазового детектора 8 підключений перший вхід аналого-цифрового перетворювача 15, який видає в двійковому коді поточне значення фазового зсуву i'' , виміряне відносно фазового зсуву n 2n . Ці значення фазового зсуву i'' зчитуються в тактові моменти часу t i'' надходять на другий вхід обчислювача 11, що підсумовує 10 15 20 25 30 n i'' i' . За цією величиною визначається i як i arccos i' / 2K і далі за формулою 3 знаходиться Ci . Обчислені значення приросту швидкості поширення звуку Ci , в моменти часу t i , виміряні відносно моментів випромінювання зондувальних імпульсів, що надходять з виходу обчислювача 11 на вхід 2 пристрою відображення інформації 5 для реєстрації вертикального профілю швидкості звуку. Лінійно зростаючі величини t i формуються в обчислювачі 11 після надходження на вхід 3 обчислювача 11 синхроімпульсу, з виходу першого подільника частоти 3, відповідного моменту випромінювання зондувального імпульсу. Для керування роботою пристрою відображення інформації 5 і аналого-цифрового перетворювача 15 використовується генератор тактових імпульсів 4 з періодом t , який також задає моменти випромінювання зондувальних імпульсів, зменшуючи частоту генератора тактових імпульсів 4 за допомогою першого подільника частоти 3. Синхроімпульси з виходу першого подільника частоти 3 надходять на передавальний тракт 2 і одночасно дозволяють запис у реверсивний лічильник 10 по другому входу числа К. В міру поширення зондувального імпульсу буде збільшуватись кут візування i , фазовий зсув і у реверсному лічильнику 10 послідовно зменшуватись попередньо записане число n K,K 1,K 2,..., що зчитується в тактові моменти часу за розрізнювальним сигналом, який надходить на другий вхід реверсивного лічильника 10. Ці числа n надходять на перший вхід обчислювача 11, а на другий вхід надходять оцифровані значення фазового зсуву з виходу аналого-цифрового перетворювача 15. Обчислювач 11 виконує підсумовування n 2n i'' , визначає поточне значення i , а також виконує інші вищезазначені операції. Розглянутий пристрій може визначати залежності Ci від глибини тільки за наявності UC шум 2 n на виходах приймальних антен не менше 3, де UC - амплітудне значення сигналу об'ємної реверберації на виході другої приймальної антени 12, n - середньоквадратичне значення шуму там же. Для вимірювання цього відношення використовуються послідовно з'єднані пристрої: фіксатор нулів 14, другий подільник частоти 17, генератор із зовнішнім керуванням фази сигналів 18, другий фазовий детектор 19, і фазообертач / 2 20, підключені до виходу другого підсилювача-обмежувача 13, який практично не впливає на величину відношення сигнал/шум. Він нормалізує тільки вихідну амплітуду напруги, тому до його виходу підключено вимірювач величини відношення сигнал/шум, що складається з фіксатора нулів 14, другого подільника частоти 17, генератора із зовнішнім керуванням фази сигналів, другого фазового детектора 19 і порогового пристрою 16. Вимірювач відношення сигнал/шум працює наступним чином: нехай сигнал об'ємної реверберації на інтервалі часу кореляції має вигляд: uC ( t ) UC ( c t c i ) де UC , c , c - відповідно амплітуда, частота і фаза об'ємної реверберації, i - помилка фазування, c 2fc - утова частота, яка може відрізнятися від частоти випромененого сигналу на величину доплерівського зсуву. Ця напруга надходить на фіксатор нулів 14, який виробляє позитивні імпульси в моменти переходу сигналу через нульовий рівень з позитивною крутизною (на початку кожного періоду). Ці імпульси надходять на другий подільник частоти 17, на виході якого з'являються імпульси з частотою в N разів меншою, де N – коефіцієнт розподілу подільника. Позначимо період досить інтенсивного сигналу об'ємної реверберації, тобто при відношенні сигнал 35 40 45 50 і i' 5 UA 106684 C2 5 10 15 проходження імпульсів на виході подільника частоти 2 17, як N . Ці імпульси надходять на fc вхід синхронізації генератора, що фазується 18, який має частоту fc і в моменти надходження фазових імпульсів з другого подільника частоти 17 (напруга має фазу, яка дорівнює нулю) його коливання починаються з нульовою фази. Оскільки фазові імпульси з періодом надходять в моменти часу переходу через нульовий рівень сигналів об'ємної реверберації, то в ці моменти часу сигнал з виходу генератора із зовнішнім керуванням фази сигналів 18 і сигнал об'ємної реверберації збігаються за фазою, тобто напруга генератора, що фазується 18 uГ ( t ) UГ cos(Г t c i ) де Г 2fГ - кутова частота генератора. i - помилка фазування у і-му циклі фазування. Напруги uc ( t ) і uГ ( t ) надходять на другий фазовий детектор 19, який містить фільтр нижніх частот, для виділення складової різницевої частоти, тобто частоти c Г . Тоді напругу на виході другого фазового детектора 19 запишемо у вигляді: uД ( t ) K ДUСUГ cos(t i ) де K Д коефіцієнт передачі другого фазового детектора 19. Ця напруга являє собою (Фіг. 4) відрізки гармонічного коливання частоти , тривалості з фазою i . i - помилка фазування, викликана тим, що фаза суміші сигнал+шум відрізняється від фази сигналу на величину i , одновимірна щільність ймовірності якої має вигляд P( i ) (Б.Р. Левин "Теоретические основы статистической радиотехники М.: "Сов. Радио", 1974 с. 342) 1 2 cos i e F( 2 cos i )e 2 2 UC де - відношення сигнал/шум; 2 n P( i ) 20 2 sin2 i 2 (4) UC - середньоквадратична напруга перешкоди; 2 n F( 2 cos i ) табульований інтеграл ймовірності. 25 Постійна складова UД напруги u Д ( t ) є UД 1 u Д ( t )dt 0 Виконавши ряд перетворень, запишемо: K ДUCUГ 1 UД M(cos i sin 2 sin i sin2 ) 2 2 1 де: M(cos i sin 2 sin i sin 2 ) - символ математичного сподівання. 2 Оскільки M(sin i ) 0 то 1 sin (5) K ДUCUГM(cos i ) 2 1 1 де: M(cos i ) 1F1( ; 2; 2 ) (Б.Р.Левин "Теоретические основы статистической 2 2 радиотехники" М.: "Сов. Радио", 1974 с.352) - вироджена гіпергеометрична функція аргументу x , тобто постійна складова напруги 1F ( x ) 1 на виході другого фазового детектора 19 залежить від величини відношення сигнал/шум . Незначні розлади частоти генератора fГ відносно частоти об'ємної реверберації fс при UД 30 35 40 постійній величині будуть мати малий вплив на UД внаслідок малих змін функції sinx / x при невеликих x . Величини UС і UГ також практично постійні, тому що UС знімається з виходу другого підсилювача-обмежувача 13, а UГ - амплітуда напруги на виході генератора із зовнішнім керуванням фази сигналів 18. Отже, напруга на виході другого фазового детектора 19 практично пропорційна відношенню сигнал/шум, вона надходить на пороговий пристрій 16, де встановлений граничний рівень, відповідний мінімально допустимій величині відношення сигнал/шум. Обчислювач 11 працює 6 UA 106684 C2 5 10 15 20 25 тільки при спрацьовуванні порогового пристрою 16, з якого на четвертий вхід обчислювача 11 приходить сигнал підтвердження необхідної величини відношення сигнал/шум. Розглянемо постійну складову напруги на виході третього фазового детектора 21, вхід 2 якого через фазообертач 11 з'єднаний з виходом генератора із зовнішнім керуванням фази сигналів 18, тому сигнали об'ємної реверберації і сигнали з генератора із зовнішнім керуванням фази сигналів 18 надходять в квадратурі. Проробивши викладки, аналогічні вищенаведеним, отримаємо: sin2 1 2 (6) UЧ K ДUCUГM(cos i ) 2 2 Звідки випливає, що напруга на виході третього фазового детектора 21 є пропорційною величиною вертикальної складової швидкості течії прісноводного джерела, присутнього в "колодязі". Як випливає з формули (5), напруга на виході другого фазового детектора 19 є тільки функцією відношення сигнал/шум. При зменшенні цього відношення нижче заданого рівня зменшується напруга на виході другого фазового детектора 19 і пороговий пристрій 16 відключає обчислювач 11 від пристрою відображення інформації 5, перешкоджаючи реєстрації недостовірних даних про вертикальний профіль швидкості поширення звуку у воді. Напруга з виходу другого фазового детектора 19 використовується також при визначенні швидкості поширення звуку C 0 у приповерхневому шарі C0 L l / 2 , де t1 - затримка t1 першого ехо-сигналу після випромінювання зондувального імпульсу. Для обчислення C 0 на третій вхід обчислювача 11 подається синхросигнал про випромінювання зондувального імпульсу, а на вхід 5 - сигнал про появу на другій приймальній антені 12 сигналу від зондувального імпульсу, що прийшов за боковими пелюстками передавальної антени 1. Обчислене значення C 0 також реєструється пристроєм відображення інформації спільно з кожним профілем C i , визначеним у функції глибини, і швидкістю вертикальної течії прісної води в "колодязі". ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 Гідролокатор, який містить передавальну антену, передавальний тракт, перший подільник частоти, генератор тактових імпульсів, першу приймальну антену і пристрій відображення інформації, причому вхід передавальної антени з'єднаний з першим виходом передавального тракту, вхід передавального тракту з'єднаний з виходом першого подільника частоти, а вхід першого подільника з'єднаний з виходом генератора тактових імпульсів, вихід першого подільника також з'єднаний з першим входом пристрою відображення інформації, який відрізняється тим, що у нього введені: перший підсилювач-обмежувач, перший фазовий детектор, селектор стрибків напруги, аналого-цифровий перетворювач, реверсивний лічильник, обчислювач, друга приймальна антена, другий підсилювач-обмежувач, фіксатор нулів, другий подільник частоти, генератор із зовнішнім керуванням фази сигналів, другий фазовий детектор, фазообертач /2, третій фазовий детектор і пороговий пристрій, причому другий вихід передавального тракту з'єднаний з першим входом другого подільника частоти, вихід генератора тактових імпульсів з'єднаний також з другим входом аналого-цифрового перетворювача і другим входом реверсивного лічильника, перша приймальна антена з'єднана з входом першого підсилювача обмежувача, вихід першого підсилювача обмежувача з'єднаний з входом першого фазового детектора, вихід першого фазового детектора з'єднаний з входом селектора стрибків напруги і першим входом аналого-цифрового перетворювача, вихід селектора стрибків напруги з'єднаний з першим входом реверсивного лічильника, третій вхід реверсивного лічильника з'єднаний з виходом першого подільника частоти, вихід реверсивного лічильника з'єднаний з першим входом обчислювача, другий вхід обчислювача з'єднаний з виходом аналого-цифрового перетворювача, третій вхід обчислювача з'єднаний з виходом першого подільника частоти, четвертий вхід обчислювача з'єднаний з виходом порогового пристрою, п'ятий вхід обчислювача з'єднаний з виходом третього фазового детектора, вихід обчислювача з'єднаний з другим входом пристрою відображення інформації, друга приймальна антена з'єднана з входом другого підсилювача обмежувача, вихід якого з'єднаний з другим входом другого фазового детектора, з другим входом третього фазового детектора, з другим 7 UA 106684 C2 5 входом першого фазового детектора і входом фіксатора нулів, вихід фіксатора нулів з'єднаний з другим входом другого подільника частоти, вихід другого подільника частоти з'єднаний з входом генератора із зовнішнім керуванням фази сигналів, перший вихід якого з'єднаний з першим входом другого фазового детектора і входом фазообертача /2, другий вихід генератора із зовнішнім керуванням фази сигналів з'єднаний з другим входом передавального тракту, вихід другого фазового детектора з'єднаний з входом порогового пристрою, а вхід 3-го фазового детектора з'єднано з фазообертачем /2. 8 UA 106684 C2 9 UA 106684 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Автори англійськоюHonchar Anatolii Ivanovych, Holod Oleh Saulovych, Klochan Yurii Anatoliiovych, Klochan Valentyna Ivanivna, Shlychek Liubov Ivanivna
Автори російськоюГончар Анатолий Иванович, Голод Олег Саулович, Клочан Юрий Анатолиевич, Клочан Валентина Ивановна, Шличек Любовь Ивановна
МПК / Мітки
МПК: G01S 15/00, G01V 1/38
Мітки: морі, пошуку, джерел, гідролокатор, прісноводних
Код посилання
<a href="https://ua.patents.su/12-106684-gidrolokator-dlya-poshuku-prisnovodnikh-dzherel-v-mori.html" target="_blank" rel="follow" title="База патентів України">Гідролокатор для пошуку прісноводних джерел в морі</a>
Пристрій для виміру електричної ємності хімічних джерел струму
Номер патенту: 70359
Опубліковано: 15.10.2004
Автори: Косюк Віктор Іванович, Косюк Андрій Вікторович
МПК: H02J 7/00, H01M 10/48, H01M 10/44, G01R 31/36
Мітки: хімічних, пристрій, електричної, струму, джерел, виміру, ємності
Формула / Реферат:
Пристрій для вимірювання електричної ємності хімічних джерел струму, що реалізує алгоритм:,де Qел - електрична ємність джерела струму, що вимірюється, А*год;С - ємність конденсатора, що заряджається, Ф;U - напруга на джерелі струму, що вимірюється, В;tзар - час заряду конденсатора від джерела струму, що вимірюється, с;k -...
Гідролокатор
Номер патенту: 88750
Опубліковано: 10.11.2009
Автори: Шличек Любов Іванівна, Голод Олег Саулович, Донченко Світлана Іванівна, Клочан Валентина Іванівна, Клочан Юрій Анатолійович, Гончар Анатолій Іванович
МПК: G01V 1/38, G01S 15/00
Мітки: гідролокатор
Формула / Реферат:
Гідролокатор, що містить пристрій відображення інформації, пристрій обробки інформації, пристрій керування, формувач частоти запуску, формувач імпульсу запуску, підсилювач потужності, випромінюючу антену, першу й другу приймальні антени, перший і другий підсилювач-обмежник, фазовий детектор, керований фазообертач і подільник частоти, причому перший вихід пристрою керування з'єднаний з входом формувача частоти запуску, вихід формувача частоти...
Гідролокатор бокового огляду
Номер патенту: 105592
Опубліковано: 26.05.2014
Автори: Шличек Любов Іванівна, Клочан Валентина Іванівна, Гончар Анатолій Іванович, Клочан Юрій Анатолійович, Федосеєнков Сергій Геннадійович, Сафонов Олександр Валерійович
МПК: G01S 15/10, G01S 7/00, G01V 1/00
Мітки: бокового, гідролокатор, огляду
Формула / Реферат:
Гідролокатор бокового огляду, який містить антену, комутатор приймання-передачі, передавальний тракт, перший формувач зондувального імпульсу з лінійною частотною модуляцією, приймальний тракт, перший багатоканальний корелятор для прийому сигналів з лінійною частотною модуляцією та пристрій відображення інформації, причому антена через комутатор прийому передачі підключена до виходу передавального тракту і входу приймального тракту, вхід...
Фазовий гідролокатор бокового огляду
Номер патенту: 74686
Опубліковано: 16.01.2006
Автори: Клочан Юрій Анатолійович, Гончар Анатолій Іванович, Клочан Валентина Іванівна
МПК: G01V 1/38, G01S 15/00
Мітки: огляду, фазовий, бокового, гідролокатор
Формула / Реферат:
Фазовий гідролокатор бокового огляду, який містить формувач основного зондуючого імпульсу, передавальний тракт, випромінюючу антену, першу і другу приймальні антени, перший і другий приймальні тракти, перший і другий смугові фільтри, фазовий детектор, фільтр низьких частот, пристрій відображення інформації і пристрій керування, причому вихід передавального тракту з'єднаний з виходом випромінюючої антени, вихід першої приймальної антени...
Автоматизована система пошуку оптимального плану багатофакторного експерименту
Номер патенту: 68367
Опубліковано: 26.03.2012
Автори: Цеховський Максим Володимирович, Кошовий Микола Дмитрович, Дергачов Володимир Андрійович, Костенко Олена Михайлівна
МПК: G06F 17/00
Мітки: пошуку, плану, система, оптимального, автоматизована, експерименту, багатофакторного
Формула / Реферат:
Автоматизована система пошуку оптимального плану багатофакторного експерименту, що містить керуючий вхід, інформаційний вихід, перший блок пам'яті, блок порівняння, елемент затримки, яка відрізняється тим, що містить блок керування, формувач перетворень, блок перетворення плану експерименту, блок оцінки характеристик плану експерименту, два елементи АБО, другий блок пам'яті, причому керуючий вхід з'єднаний з першим входом блока керування,...
Попередній патент: Спосіб виробництва спреду з наповнювачем
Наступний патент: Спосіб наддування паливних баків рушійних установок ракет-носіїв
Випадковий патент: Абсорбційний холодильник