Маніпулятор для керування електронним пристроєм та спосіб керування електронним пристроєм
Формула / Реферат
1. Маніпулятор для керування електронним пристроєм, що містить корпус з поверхнями для опори ніг оператора та з виступаючими поверхнями, призначеними для встановлення на горизонтальну поверхню, причому в корпус або на корпус вмонтований блок обробки та прийому/передачі даних на електронний пристрій, який з'єднаний з ним за допомогою дротового або бездротового з'єднання, який відрізняється тим що корпус виконаний у вигляді порожнистої закритої з обох боків труби, виступаючі поверхні, призначені для встановлення на горизонтальну поверхню, виконані у вигляді щонайменше одного колеса кочення, які жорстко прикріплені зовні корпусу симетрично відносно центру корпусу між поверхнями для опори ніг оператора або в центрі корпусу, причому в порожнину корпусу додатково встановлений щонайменше один блок датчиків для виявлення руху корпусу, який функціонально з'єднаний з блоком обробки та прийому/передачі даних на електронний пристрій, та маніпулятор виконаний з можливістю кочення та нахилу відносно горизонтальної осі.
2. Маніпулятор за п. 1, який відрізняється тим, що зовні корпус обладнаний щонайменше двома кільцями прокручування/натискання, які виконані з можливістю вільного обертання відносно корпусу та один від одного і функціонально з'єднані з блоком обробки та прийому/передачі даних на електронний пристрій.
3. Маніпулятор за одним із пп. 1-2, який відрізняється тим, що опорна поверхня для ніг оператора виконана у вигляді двох опорних циліндричних коліс, які виконані з можливістю обертання відносно зовнішньої поверхні корпусу та електрично з'єднані з електродвигунами, які встановлені в порожнині корпусу.
4. Маніпулятор за одним із пп. 1-3, який відрізняється тим, що колеса кочення обладнані датчиками тиску, які функціонально з'єднані з блоком обробки та прийому/передачі даних на електронний пристрій.
5. Маніпулятор за одним із пп. 1-4, який відрізняється тим, що в порожнину корпусу встановлені щонайменше два мікрофони, які функціонально з'єднані з блоком обробки та прийому/передачі даних на електронний пристрій.
6. Маніпулятор за одним із пп. 1-5, який відрізняється тим, що блок обробки та прийому/передачі даних на електронний пристрій виконаний у вигляді процесора або мікроконтролера, який виконаний з можливістю прийому вихідних сигналів з одного або декількох датчиків з блока датчиків для виявлення руху корпусу, про зміну тиску на поверхню коліс кочення, звукових сигналів з щонайменше одного мікрофона, та генерації і передачі керуючої інформації для керування роботою одного або більше процесів на електронному пристрої, підключеному до маніпулятора.
7. Маніпулятор за одним із пп. 1-6, який відрізняється тим, що по центру корпусу виконане кільцеве заглиблення з роз'ємом для підключення до електронного пристрою, яке призначене для кріплення кронштейна.
8. Спосіб керування електронним пристроєм, який полягає в тому, що формують керуючі дії, відповідні завданню по керуванню електронним пристроєм, і передають їх в електронний пристрій, який відрізняється тим, що формують керуючі дії шляхом зміни траєкторії руху корпусу маніпулятора в просторі за допомогою примусового переміщення шляхом пересування, штовхання, кочення та нахилу маніпулятора за допомогою ніг, відстежують за допомогою блока датчиків для виявлення руху поточні значення просторових координат, постійно визначають лінійне і кутове зміщення/прискорення корпусу маніпулятора від його початкового положення, виробляють сигнали керування, які через блок обробки та прийому/передачі даних передають на електронний пристрій.
9. Спосіб за п. 8, який відрізняється тим, що формують керуючі дії шляхом створення звукових коливань в порожнині корпусу маніпулятора, далі здійснюють аналіз звукових коливань, виробляють сигнали керування, які через блок обробки та прийому/передачі даних передають на електронний пристрій.
Текст
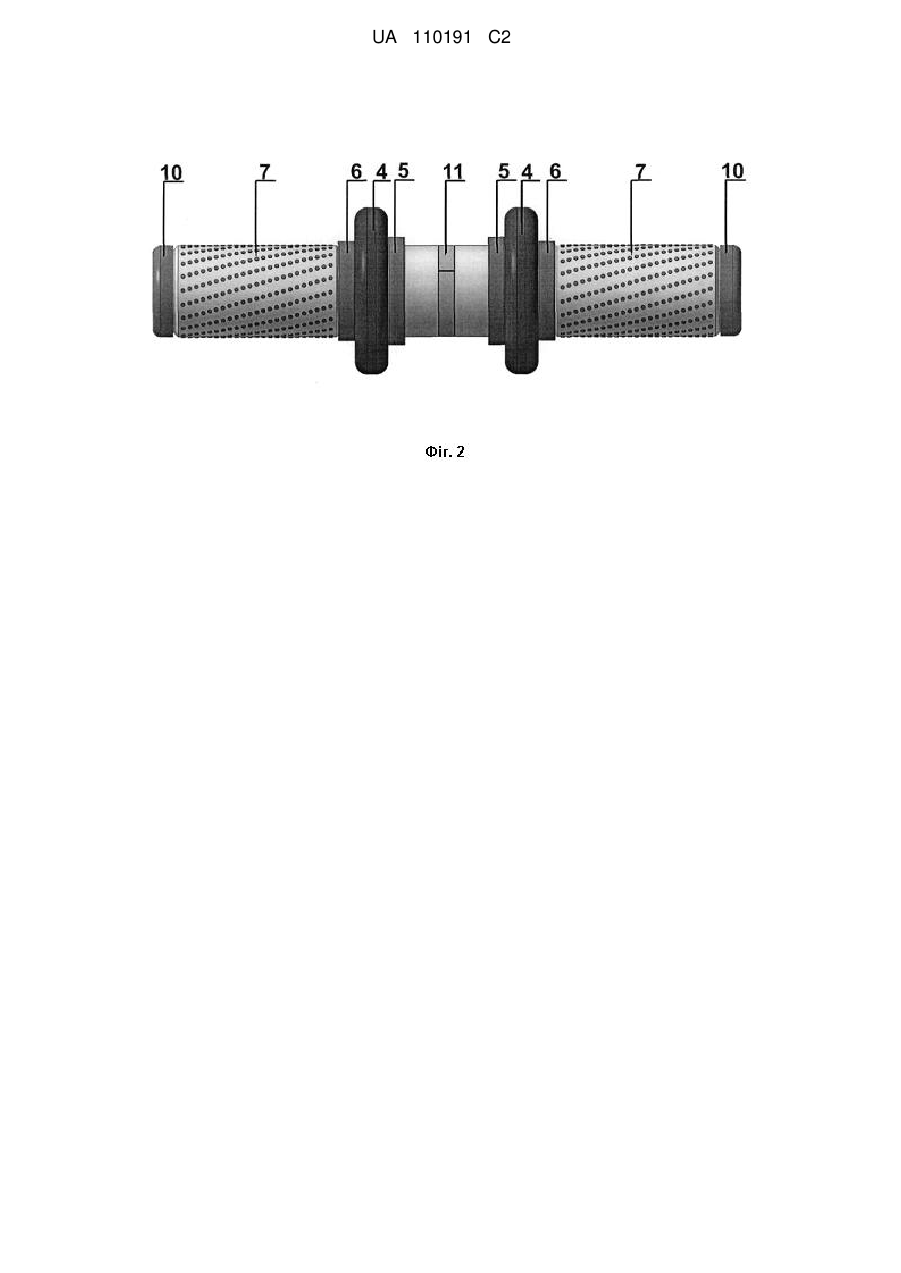
Реферат: Маніпулятор для керування електронним пристроєм та спосіб керування належать до пристроїв програмного керування. Маніпулятор може бути використаний як керуючий елемент для керування комп'ютером або іншими електронними пристроями для введення, обробки і виведення даних, керування об'єктами будь-яких пристроїв візуального відображення текстової та графічної інформації, а також для керування роботизованими об'єктами, транспортними засобами, для керування об'єктами в комп'ютерних симуляторах і при тривимірному проектуванні. Маніпулятор для керування електронним пристроєм, що містить корпус з поверхнями для опори ніг оператора та з виступаючими поверхнями, призначеними для встановлення на горизонтальну поверхню, причому в корпус або на корпус вмонтовано блок обробки та прийому/передачі даних на електронний пристрій, який з'єднаний з ним за допомогою дротового або бездротового з'єднання, в якому корпус виконано у вигляді порожнистої закритої з обох боків труби, виступаючі поверхні, призначені для встановлення на горизонтальну поверхню, виконані у вигляді щонайменше одного колеса кочення, які жорстко прикріплені зовні корпусу симетрично відносно центру корпусу між поверхнями для опори ніг оператора або в центрі корпусу, причому в порожнину корпусу додатково встановлений щонайменше один блок датчиків для виявлення руху корпусу, який функціонально з'єднаний з блоком обробки та прийому/передачі даних на електронний пристрій, а маніпулятор виконаний з можливістю кочення, нахилу відносно горизонтальної осі. Також запропонований спосіб керування електронним пристроєм, який полягає в тому, що формують керуючі дії, відповідні завданню по керуванню електронним пристроєм, і передають їх в електронний пристрій. За допомогою запропонованого маніпулятора розширено функціональні можливості керування електронним пристроєм. UA 110191 C2 (12) UA 110191 C2 UA 110191 C2 5 10 15 20 25 30 35 40 45 50 55 60 Запропонована група винаходів належить до пристроїв програмного керування та може бути використана як керуючий елемент (ножного маніпулятора) для керування комп'ютером або іншими електронними пристроями для введення, обробки і виведення даних, керування об'єктами будь-яких пристроїв візуального відображення текстової та графічної інформації, а також для керування роботизованими об'єктами, транспортними засобами, для керування об'єктами в комп'ютерних симуляторах і при тривимірному проектуванні. Запропонований спосіб також може бути використаний у випадках, коли ввід інформації для оператора (користувача) за допомогою рук є обтяжливим. Відомий ножний контролер (Патент США, номер публікації US20110088536 А1, МПК G10H 1/32, дата публікації 21 квітня 2011 p.), який містить корпус з десятьма сенсорними клавішами та клавішами для керування курсором в напрямках вверх/вниз, вправо/вліво, причому зазначені клавіші забезпечені підсвічуванням. Даний пристрій містить процесор, який виконаний з можливістю прийому вихідних сигналів від одного або декількох датчиків тиску, які розташовані під клавішами, та можливістю генерувати керуючу інформацію у відповідь на зміну натиску на певну клавішу та відповідно до даної інформації, керувати роботою одного або більше процесів або пристроїв, які зв'язані з контролером. Завданнями, які виконує даний пристрій, є відкриття і закриття додатків, введення тексту, масштабування, перегляд папок та файлів на комп'ютері та інше. Даний пристрій широко використовується для одночасного керування комп'ютером та грою на музичних інструментах, та як руки в користувача залишаються вільними. Недоліком даного пристрою є його обмежені функціональні можливості, а саме те, що за його допомогою можливо тільки управляти об'єктами на площині, тобто керування об'єктами здійснюється за рахунок оброблюваних сигналів тільки по двох координатах. Відомий пристрій для введення даних в персональний комп'ютер (Патент РФ на винахід № 2193227, МПК G06F3/033, G09G5/08, опубл. 20.11.2002 p., власник Каган Марк Яковлевич), в якому корпус пристрою складається з двох частин - основи і кришки, яка виконана у вигляді коробки, на верхній площадці якої, що має розмір, достатній для розміщення на ній стопи дорослої людини, поміщені клавіші, а на дні кришки розміщені підпружинені шарові опори, на яких пристрій рухається по підлозі, причому при відсутності тиску ноги на верхню кришку пристрою відсутнє зчеплення кульки пристрою з поверхнею підлоги. Спосіб введення даних за допомогою даного пристрою, який описаний в заявці на винахід РФ №2000130053 (МПК G06F3/033, G09G5/08, опубл. 10.01.2003 p., заявник Каган Марк Яковлевич). Спосіб полягає в тому, що оператор, пересуваючи кінцівкою пристрій введення даних по гладкій поверхні, переміщує курсор на екрані монітора і вибирає символи або команди, які вводяться, натискаючи пальцями кінцівки кнопки, розташовані на пристрої введення даних. У способі пристрій введення даних розташовується на підлозі, а оператор вводить дані і команди в комп'ютер з пристрою введення даних шляхом переміщення його по підлозі і натиснення кнопок ногою, вміщеній на пристрій. Відомий пристрій використовують наступним чином: у вихідному стані перед початком роботи пружини кульових опор у вільному стані забезпечують таке положення кришки щодо кульових опор, при якому кулька не дотикається плоскої поверхні, наприклад, підлоги. Оператор, поставивши ступню ноги на верхню основу кришки, натискає на неї, пружини стискаються і коробка опускається вниз до упору в обмежувачі. Кулька вступає в зачеплення з плоскою поверхнею підлоги і, залежно від напрямку руху пристрою під дією ноги оператора, перекочується, переміщаючи покажчик пристрою на екрані відеомонітора. При появі необхідності у оператора скористатися тією чи іншою клавішею останній, не відриваючи ступні ноги від кришки, носком ступні натискає цю клавішу. Недоліками відомого пристрою та способу введення даних є те, що: - переміщення пристрою введення даних можливо тільки здійснювати по горизонтальних напрямках (вправо/вліво, вверх/вниз) і відповідно, переміщення курсора на екрані відеомонітора буде здійснюватися тільки у вказаних напрямах на площині відображення; - пристрій забезпечений тільки трьома клавішами для керування, які виконують відомі функції ручного маніпулятора "миша"; - використання даного пристрою без додаткових пристроїв вводу інформації (наприклад, клавіатури) не забезпечує швидкого вводу інформації в комп'ютер; - незручність у використанні, яка пов'язана з тим, що даний пристрій пристосований для керування однією ногою. Відомий ножний контролер для керування пристроєм (Патент СШІА, номер публікації US20140035888 А1, МПК G06F3/033, дата публікації 6 лютого 2014 p.), що включає в себе платформу, призначену для розміщення ноги користувача. Платформа містить приймальний 1 UA 110191 C2 5 10 15 20 25 30 35 40 45 50 55 60 елемент у вигляді верхньої пластини та основу. Даний контролер на основі містить щонайменше один датчик положення для виявлення зміни позиції платформи. Датчики функціонально з'єднані з блоком інтерфейсу зв'язку для того, щоб передавати відповідні команди для керування пристроєм. Контролер виконаний з можливістю з'єднання з джерелом живлення для живлення датчиків руху та/або модуля інтерфейсу зв'язку. Наприклад, контролер може бути виконаний з можливістю приєднання до зовнішнього джерела живлення або до пристрою через USB-πορτ. Керування контролером здійснюють наступним чином: користувач ставить ногу на платформу та, змінюючи її кут нахилу, або повертає її на певний кут, здійснює керування пристроєм, до якого підключений. Використання даного контролера часто приводить до помилкового введення команд, через те що його конструкція вимагає надзвичайно точного руху ноги для розгойдування та повертання платформи для здійснення команд керування. Крім того, в відомому контролері відсутня можливість управляти пристроєм (комп'ютером) за допомогою таких дій користувача, як кочення контролера з обертанням відносно горизонтальної осі на кут 360 градусів, що інтерпретується як виконання окремих команд керування пристроєм підключеним до контролера. Дане технічне рішення вибране за прототип. В основу винаходу поставлена задача удосконалити відомий ножний контролер для керування електронним пристроєм, в якому шляхом нового виконання корпусу з можливістю кочення з обертанням відносно горизонтальної осі на кут 360 градусів та з одночасною можливістю нахилу пристрою, забезпечується ввід даних в тривимірній системі координат та керування електронним пристроєм (об'єктом) з шістьма ступенями свободи та можливістю керування двома ногами користувача. Ще однією задачею даного винаходу є створення аналогів управляючих кнопок ручних маніпуляторів, які працюють при натисканні ногами оператора. Додатковою задачею запропонованого винаходу є створення зручного та простого в управлінні маніпулятора для людей, які відчувають деякі труднощі у використанні контролера з ручним керуванням. Поставлена задача вирішується тим, що запропонований маніпулятор для керування керування електроннимпристроєм, що містить корпус з поверхнями для опори ніг оператора та з виступаючими поверхнями, призначеними для встановлення на горизонтальну поверхню, причому в корпус або на корпус вмонтовано блок обробки та прийому/передачі даних на електронний пристрій, який з'єднаний з ним за допомогою дротового або бездротового з'єднання, в якому, згідно з винаходом, корпус виконано у вигляді порожнистої закритої з обох боків труби, виступаючі поверхні, призначені для встановлення на горизонтальну поверхню, виконані у вигляді щонайменше одного колеса кочення, які жорстко прикріплені зовні корпусу симетрично відносно центру корпусу між поверхнями для опори ніг оператора або в центрі корпусу, причому в порожнину корпусу додатково встановлений щонайменше один блок датчиків для виявлення руху корпусу, який функціонально з'єднаний з блоком обробки та прийому/передачі даних на електронний пристрій, а маніпулятор виконаний з можливістю кочення та/або нахилу відносно горизонтальної осі. Крім того, зовні корпус обладнано щонайменше двома кільцями прокручування/натискання, які виконані з можливістю вільного обертання відносно корпусу та один від одного та функціонально з'єднані з блоком обробки та прийому/передачі даних на електронний пристрій. Крім того, опорна поверхня для ніг оператора виконана в вигляді двох опорних циліндричних коліс, які виконані з можливістю обертання відносно зовнішньої поверхні корпусу та електрично з'єднані з електродвигунами, які встановлені в порожнині корпусу. Крім того, колеса кочення обладнано датчиками тиску, які функціонально з'єднані з блоком обробки та прийому/передачі даних на електронний пристрій. Крім того, в порожнину корпусу встановлено щонайменше два мікрофони, які функціонально з'єднані з блоком обробки та прийому/передачі даних на електронний пристрій. Крім того, блок обробки та прийому/передачі даних на електронний пристрій виконаний в вигляді процесора або мікроконтролера, який виконаний з можливістю прийому вихідних сигналів з одного або декількох датчиків з блока датчиків для виявлення руху корпусу або про зміну тиску на поверхню коліс кочення та звукових сигналів з щонайменше одного мікрофона та генерації та передачі керуючої інформації для керування роботою одного або більше процесів на електронному, підключеному до маніпулятора. В основу винаходу також поставлена задача розробити спосіб керування електронним пристроєм, який забезпечить можливість керування одночасно декількома функціями електронного пристрою шляхом використання єдиного керуючого маніпулятора, який примусового пересувають та/або штовхають та/або котять та/або нахиляють за допомогою ніг оператора. 2 UA 110191 C2 5 10 15 20 25 30 35 40 45 50 55 Поставлена задача вирішується тим, що запропонований спосіб керування електронним пристроєм, який полягає в тому, що формують керуючі дії, відповідні завданню по управлінню електронним пристроєм, і передають їх в електронний пристрій. Новим є те, що формують керуючі дії шляхом зміни траєкторії руху корпусу маніпулятора в просторі за допомогою примусового пересування та/або штовхання та/або кочення та/або нахилу маніпулятора за допомогою ніг, відстежують за допомогою блока датчиків для виявлення руху поточні значення просторових координат, постійно визначають лінійне і кутове зміщення/прискорення корпусу маніпулятора від його початкового положення, виробляють сигнали керування, які через блок обробки та прийому/передачі даних передають на електронний пристрій. Крім того, формують керуючі дії шляхом створення звукових коливань в порожнині корпусу маніпулятора, далі здійснюють аналіз звукових коливань, виробляють сигнали керування, які через блок обробки та прийому/передачі даних передають на електронний пристрій. Нове виконання корпусу запропонованого маніпулятора, а саме у вигляді тіла кочення, яке має нестійку рівновагу, забезпечує можливість досить легко та точно змінювати положення маніпулятора на горизонтальній поверхні, здійснювати його нахил (вправо/вліво, під кутом) за допомогою ніг, що приводить до одночасного керування декількома функціями електронного пристрою. Використання в запропонованому пристрої блока датчиків для виявлення руху корпусу, наприклад блока датчиків, який містить датчики гіроскопа/акселерометра, забезпечує одночасну передачу даних вимірювань зміни положення корпусу маніпулятора (а саме лінійне прискорення по трьох осях та кутове прискорення) в блок обробки та прийому/передачі даних на електронний пристрій, програмне забезпечення якого здійснює їх обробку та відповідно обробленим даним керує роботою електронного пристрою або управляє переміщенням (обертання) об'єктів у просторі (наприклад, при тривимірному проектуванні). Тобто, запропонований маніпулятор дозволяє управляти переміщенням об'єктів у просторі (в тривимірній системі координат по трьох осях), а також керувати обертанням об'єктів навколо трьох взаємно перпендикулярних осей координат. Керування електронним пристроєм, який забезпечить можливість керування одночасно декількома функціями електронного пристрою шляхом використання єдиного керуючого маніпулятора, який примусового пересувають та/або штовхають та/або котять та/або нахиляють за допомогою ніг оператора. Перевагою запропонованого способу є можливість при використанні єдиного керуючого пристрою (запропонованого маніпулятора) одночасно управляти декількома функціями електронного пристрою. Наприклад, першою функцією можна управляти у відповідь на кочення корпусу маніпулятора, другою функцією можна управляти у відповідь на розвернення маніпулятора по діагоналі, третьою функцією можливо управляти, здійснюючи стукотіння по корпусу маніпулятора, четвертою, - натискаючи на колеса кочення, і т. д. Тобто, здійснюючи одночасне або вибіркове опитування датчиків або приймачів звукових сигналів, блок обробки та прийому/передачі даних керує роботою (функціями) електронного пристрою. Винахід пояснюється кресленнями, де на Фіг. 1 зображений запропонований маніпулятор (загальний вид), на Фіг. 2 - загальний вид запропонованого маніпулятора з додатковими елементами, на Фіг. 3 - елементи маніпулятора, а на Фіг. 4 - структурна схема даного маніпулятора. Запропонований маніпулятор для керування електронним пристроєм (див. Фіг. 1-3) містить корпус 1, який виконано у вигляді порожнистої труби. Корпус 1 має симетричну структуру, по центру корпусу 1 виконано кільцеве заглиблення 2, яке створене двома виступами 3. В заглиблені виконаний роз'єм (на кресленні не показаний) для підключення маніпулятора до електронного пристрою. Конструктивно передбачено використання даного заглиблення 2 для можливого кріплення кронштейном, рухомим щодо осі кочення маніпулятора. Симетрично від заглиблення 2 на корпусі 1 знаходяться поверхні призначені для встановлення на горизонтальну поверхню, які виконані у вигляді двох коліс кочення 4, які нерухомо закріплені до корпусу 1, і можуть обертатися тільки разом з корпусом 1. Впритул до коліс кочення 4 з внутрішньої та зовнішньої сторони встановлені кільця прокручування/натискання, відповідно - внутрішні кільця 5 прокручування/натискання та зовнішні кільця 6 прокручування/натискання. У безпосередній близькості від зовнішніх кілець 6 прокручування/натискання встановлені ковзаючі щодо корпусу 1 опорні циліндричні колеса 7 з приводом через зазори 8 в корпусі 1 на електродвигуни 9. Опорні циліндричні колеса 7 встановлюються так, щоб не заважати роботі кілець прокручування/натискання 5 та 6, і їх обертанням керує електронний пристрій. Опорні циліндричні колеса 7 зовні можуть бути виконані з протекторним малюнком. 3 UA 110191 C2 5 10 15 20 25 30 35 40 45 50 55 60 Корпус 1 з кожного боку закритий боковими кільцями 10 прокручування/натискання, одне з яких обладнане роз'ємом (на кресленні не показаний) для підключення до електронного пристрою. Дані кільця з зовнішньої сторони виконані закритими, що забезпечує створення замкнутої акустичної системи всередині корпусу 1. Всі кільця прокручування/натискання (5, 6 та 10) прикріплені до корпусу 1 з можливістю вільного обертання відносно корпусу 1 та один від одного. При використанні запропонованого маніпулятора, зовні кільцеве заглиблення 2 закривають елементами захисту 11. В порожнину корпусу 1 додатково встановлено блок датчиків 12 для виявлення руху корпусу (наприклад, який складається з двох датчиків гіроскопа/акселерометра), та два мікрофони 13, які функціонально з'єднані з блоком обробки та прийому/передачі даних 14 на електронний пристрій та розташовані симетрично відносно центру корпусу 1. Також, колеса кочення 4 можуть бути обладнані датчиками тиску 15, які функціонально з'єднані з блоком обробки та прийому/передачі даних 14. Крім того, з блоком обробки та прийому/передачі даних 14 функціонально з'єднані і шість кілець прокручування/натискання (5, 6, 10). Блок обробки та прийому/передачі даних 14 на електронний пристрій виконаний в вигляді процесора або мікроконтролера (див. Фіг. 4), який виконаний з можливістю прийому вихідних сигналів з одного або декількох датчиків з блоків датчиків 12 для виявлення руху корпусу або про зміну тиску на поверхню коліс кочення від датчиків тиску 15 та звукових сигналів з щонайменше одного мікрофона 13, та призначений для здійснення обробки даної інформації за допомогою спеціальних алгоритмів та передачі на електронний пристрій. Живлення датчиків і мікроконтролера здійснюється за рахунок з'єднання з електронним пристроєм. Але, якщо такого живлення може бути недостатньо для роботи електродвигунів 9, то для цих цілей передбачено додаткове живлення, яке може бути реалізоване, наприклад у вигляді акумуляторної батареї 16. В запропонованому маніпуляторі елементами керування електронним пристроєм є кільця прокручування/натискання (5, 6, 10), які виконані з можливістю вільного обертання відносно корпусу 1 та один від одного, що дає змогу досить легко (наприклад, за допомогою великих пальців ніг) змінювати напрям та швидкість обертання даних кілець, натискати на них та інше, причому кожна дія, яку виконує користувач, передається в мікроконтролер 14, який обробляє дану дію/сигнал та передає команди на виконання в електронний пристрій. Опорна поверхня для ніг оператора виконана в вигляді двох опорних циліндричних коліс 7, які виконані з можливістю обертання відносно корпусу, та електрично з'єднані з електродвигунами 9 з редукторами через зазори 8 в корпусі. Таке виконання забезпечує не тільки зручність для оператора/користувача (ширину циліндра підбирають такою, щоб на ній розмістилася ступня дорослої людини (по ширині), але і ця відмінність забезпечує створення системи тактильних відчуттів. Так як електродвигуни 9 підключені до мікроконтролера 14, який, в свою чергу, з'єднаний з електронним пристроєм, то, наприклад, при включенні електронного пристрою, сигнал про його включення передається до мікроконтролера 14, який включає електродвигуни 9, які починають обертати опорні циліндричні колеса 7 (на які встановлені ноги користувача), що і передається користувачу. Поверхня опорних циліндричних коліс 7 може бути виконана з неоднорідною текстурою, наприклад у вигляді протектора, що забезпечує, наприклад при погладжуванні користувачем ступнями такої поверхні, створення різноманітних звуків (звукових коливань). І, також, забезпечує краще зчеплення з ногами користувача. Запропонований маніпулятор використовують наступним чином. Користувач під'єднує маніпулятор до електронного пристрою, наприклад за допомогою USB з'єднання. Підключений маніпулятор може сприйматися електронним пристроєм по-різному, в залежності від налаштувань, наприклад, як бездротовий маніпулятор - комп'ютерна миша, джойстик, генератор звукових сигналів або будь-який інший прилад з ряду стандартних для операційної системи, або ж як такий, що вимагає установки власних драйверів. Далі маніпулятор може використовуватися як стандартний пристрій введення/виведення, або ж як пристрій керування для певного програмного забезпечення. Керування маніпулятором здійснюють за допомогою ступнів ніг, пальців ніг та п'ят, з позиції сидячи на деякому підвищенні, наприклад в кріслі. Підключений до електронного пристрою маніпулятор встановлюють колесами кочення 4 на рівну робочу поверхню. Ноги встановлюють на опорні циліндричні колеса 7. Маніпулятором управляють за допомогою ніг, шляхом: кочення від себе, на себе, нахилами вліво/вправо, зміною положення кута нахилу пристрою по діагоналі; переміщенням без кочення, вліво/вправо, вгору/вниз, від себе, на себе; прокручуванням, натисканням на кільця прокручування/натискання 5, 6, 10; постукуванням в стінки бічного кільця 4 UA 110191 C2 5 10 15 20 25 30 35 40 45 50 55 60 прокручування/натискання 10; почісуванням, постукуванням будь-яких ділянок корпусу 1 пристрою. Бічні кільця прокручування/натискання 10 можуть упиратися в підлогу (робочу поверхню кочення). Датчики, такі як, гіроскопи/акселерометри з блока датчиків 12, датчики тиску 15, які розташовані усередині корпусу 1, використовуються для визначення положення корпусу 1 маніпулятора (при цьому здійснюється визначення величини лінійного прискорення по трьом осям, кутове прискорення та тиску на колеса кочення). Вимірювані величини отримують спільним аналізом показань вище перерахованих датчиків за допомогою алгоритмів, які виконуються мікроконтролером 14. Прийняті, оброблені і нормалізовані показники датчиків мікроконтролером 14 надсилаються на електронний пристрій, який реалізує необхідні дії залежно від налаштувань та програмного забезпечення: наприклад, переміщує курсор миші, виконує навігацію всередині операційної системи, переміщує і повертає віртуальні об'єкти (тривимірні моделі) в просторі або виробляє будь-які інші дії передбачені програмним забезпеченням електронного пристрою. Система мікрофонів 13 всередині корпусу дає розширені можливості керування електронним пристроєм за допомогою аналізу звуків, таких як постукування, почісування або отриманих іншим способом формування звукових коливань. При ударі по корпусу 1 маніпулятора в одному або в двох місцях, звукові коливання, які виникли в порожнині корпусу 1, через мікрофони 13 передаються до мікроконтролера 14, який їх обробляє та передає на групу інформаційних виходів електронного пристрою. Наприклад, почісування опорних циліндричних коліс 7 уздовж осі кочення дає можливість створення додаткового скролінгу (прокручування вмісту вікна, яке відображається в даний час на дисплеї електронного пристрою), заснованого на аналізі отриманих звуків програмним шляхом. В той же час, постукування опорних циліндричних коліс 4 можливо інтерпретувати, як певну дію, еквівалентну натисканню клавіші (наприклад, музичного синтезатора). А почісування коліс кочення 4 від верхнього положення до нижнього, також створює певні звукові коливання всередині порожнини корпусу 1, які за допомогою спеціального програмного забезпечення перетворюються на певну дію, призначену для керування електронним пристроєм. Використання звукового аналізу для керування електронним пристроєм має певні переваги в порівнянні зі звичайним натисканням клавіш. Наприклад, користувач використовує певний набір звуків (відомий тільки йому), який відповідає певній дії - введення пароля на комп'ютері. Крім того, запропонований маніпулятор можливо використовувати як передавач азбуки Морзе, шляхом створення звуків з лівої та правої частини маніпулятора, як то почісування або постукування: лівої частини - точка, а правої - тире (при наявності декодера азбуки Морзе на базі мікроконтролера або за допомогою спеціального програмного забезпечення, встановленого на електронний пристрій). Проте, виконання корпусу пустотілим та з матеріалів, які забезпечують добре поглинання звукових коливань при забезпеченні механічної жорсткості корпусу, дозволяє створювати більш різноманітні звукові комбінації. Крім того, оскільки такі дії як почісування та постукування мають певний музичний зміст їх можна перетворювати у звукові коливання музичних інструментів синтезаторним або програмним шляхом, в той час як кочення корпусу відносно поверхні вперед, назад можна використовувати для перемикання нотного стану. Маніпулятор має систему тактильних відчуттів колісного приводу на опорні циліндричні колеса 7. При надходженні сигналу з електронного пристрою електродвигуни 9 передають крутний момент на опорні циліндричні колеса 7, що створює певні вібрації і поштовхи на кожне опорне циліндричне колесо незалежно. Запропонований винахід пояснюється конкретними прикладами використання. Приклад 1 Керування за допомогою запропонованого маніпулятора гусеничним роботом з камерою дистанційного керування. Маніпулятор підключають до даного робота за допомогою дротового або бездротового з'єднання. Початкове положення маніпулятора (відповідно і робота) - положення без руху. При здійсненні кочення маніпулятора вперед, що еквівалентно педалі газу, робот здійснює рух вперед. Якщо кочення здійснюється плавно, то такий рух відповідає плавному збільшенню швидкості. Якщо кочення здійснюють назад, то відповідно пересування робота пригальмовується та поступово переходить в задній хід. Якщо здійснюють нахил маніпулятора вліво/вправо, то відповідно робот здійснює плавний розворот вліво/вправо. При здійсненні розвертання маніпулятора по діагоналі відносно поверхні вліво/вправо, відповідно здійснюється автоматичний поворот камери робота вліво/право. При здійсненні 5 UA 110191 C2 5 10 15 20 25 30 35 40 45 50 55 60 підйому маніпулятора носками ніг по вертикалі, відповідно камера робота підіймається вгору та опускається після опускання маніпулятора. При здійсненні бічного переміщення маніпулятора вліво/вправо, відповідно камера робота переходить в режим Zoom-ефекту (наближення, видалення фокуса камери). При здійсненні переміщення маніпулятора без кочення від себе на себе, відповідно камера робота нахиляється вверх/вниз. Крім того, програмно можливо задати і виконання інших дій роботом, наприклад: штовхання маніпулятора ступнями по вертикалі в низ - робот здійснює певну дію; штовхання на ліву або праву бокову область маніпулятора - робот здійснює ще дві різних дії. З технічної точки зору процес керування роботом за допомогою запропонованого маніпулятора виглядає наступним чином: Після підключення маніпулятора до робота (електронного пристрою) обидва прилади реалізують обмін даними. Датчики, такі як, гіроскопи/акселерометри 12, датчики тиску 15, які розташовані усередині корпусу 1, використовуються для визначення зміни положення корпусу 1 маніпулятора (при цьому здійснюється визначення величини лінійного прискорення по трьох осях, кутове прискорення та тиску на колеса кочення). Вимірювані величини отримують спільним аналізом показань вище перерахованих датчиків за допомогою алгоритмів, які виконуються мікроконтролером 14. Прийняті, оброблені і нормалізовані показники датчиків мікроконтролером 14 надсилаються на блок керування робота (наприклад, на мікроконтролер, який є основою керування роботом, і містить мікропрограму, яка забезпечує логіку роботи робота (і його камери). Далі блок керування робота програмно керує рухом робота, параметрами камери та іншого. Приклад 2. Керування за допомогою запропонованого маніпулятора курсором в системі 3-вимірного проектування для переміщення тривимірної моделі (куб) та його обертання. Стосовно нахилу і коченню маніпулятор має кутову зону спокою. Існують деякі кутові значення, при яких незначні зміни кута ніяк не впливають на дії, які передаються через блок обробки та прийому/передачі даних 14 на електронний пристрій. Це зроблено з метою уникнути похибок, які виникають внаслідок роботи, коли маніпулятор встановлений на не ідеальну рівну горизонтальну поверхнею. У початковому положенні курсор нерухомий на екрані монітора, так як і нерухомий маніпулятор. У випадку кочення маніпулятора від себе, після подолання деякого кута спокою спрацьовує команда переміщення, і при утриманні маніпулятора в такому положенні, курсор буде переміщатися горизонтально вверх. При коченні маніпулятора на себе (в кутову зону спокою), переміщення курсору припинитися. Якщо здійснювати кочення маніпулятора вперед на деякий більший кут, то відбувається обертання об'єкта (куба) щодо 3D простору уздовж лінії горизонту. А при коченні маніпулятора назад, відбувається те саме, тільки з різницею що переміщення і обертання об'єкта (куба) здійснюється в інший бік. У випадку нахилу маніпулятора в праву сторону, після подолання кутової зони спокою, відбудеться переміщення курсору вправо. При максимальному нахилі вправо, при якому маніпулятор впирається в горизонтальну поверхню, відбувається обертання об'єкта (куба) щодо 3D простору за годинниковою стрілкою. Аналогічні дії відбуваються з нахилом маніпулятора в ліву сторону, коли переміщення курсора відбувається в ліво, а обертання об'єкта (куба) щодо 3D простору проти годинникової стрілки. Розворот маніпулятора відносно горизонтальної поверхні по діагоналі вправо/вліво дозволяє здійснити обертання 3D простору уздовж вертикальної лінії. Переміщення маніпулятора без кочення, вперед/назад дозволяє наблизити/віддалити елемент куб. Бічне переміщення маніпулятора вправо/вліво дозволяє переміщувати куб вправо/вліво по горизонталі. Переміщення маніпулятора вверх (підняття над горизонтальною поверхнею) дозволяє підняти куб по вертикалі. Поштовх маніпулятора ступнями по вертикалі викликає дію аналогічну короткочасному натискання клавіші, що можна інтерпретувати як подвійне клацання мишки. Поштовх в ліву і праву бічні області так само викликає дії аналогічні короткочасному натискання клавіш (за аналогію з "мишкою" натискання лівої і правої клавіш). Також, програмно може бути закладено, що керування курсором буде здійснюватися і поштовхом маніпулятора. Крім того, в процесі керування можуть одночасно застосовуватися кутові переміщення, переміщення маніпулятора і поштовхи. Опис технічної сторони керування курсором описаний в Прикладі 1. Приклад 3 Керування курсором у двовимірних додатках за допомогою запропонованого маніпулятора. Дії кочення маніпулятора від себе на себе - є еквівалентними переміщенням курсора вверх/вниз по вертикалі. Нахил маніпулятора вліво/вправо - еквівалентні переміщенню курсора 6 UA 110191 C2 5 10 вліво/вправо по горизонталі. Короткочасне штовхання маніпулятора - еквівалентні натисканням клавіш "мишки". Слід мати на увазі, що форма виконання винаходу, описана вище і показана на кресленнях та прикладах, являє собою тільки можливий бажаний варіант його здійснення. Можуть бути використані різні варіації виконання винаходу, окремі елементи та дії можуть бути замінені еквівалентними. Запропонований винахід може бути використаний для введення, обробки і виведення даних в електронний пристрій, керування об'єктами будь-яких пристроїв візуального відображення текстової та графічної інформації, а також для керування роботизованими об'єктами, транспортними засобами або для створення музики. ФОРМУЛА ВИНАХОДУ 15 20 25 30 35 40 45 50 55 60 1. Маніпулятор для керування електронним пристроєм, що містить корпус з поверхнями для опори ніг оператора та з виступаючими поверхнями, призначеними для встановлення на горизонтальну поверхню, причому в корпус або на корпус вмонтований блок обробки та прийому/передачі даних на електронний пристрій, який з'єднаний з ним за допомогою дротового або бездротового з'єднання, який відрізняється тим, що корпус виконаний у вигляді порожнистої закритої з обох боків труби, виступаючі поверхні, призначені для встановлення на горизонтальну поверхню, виконані у вигляді щонайменше одного колеса кочення, які жорстко прикріплені зовні корпусу симетрично відносно центру корпусу між поверхнями для опори ніг оператора або в центрі корпусу, причому в порожнину корпусу додатково встановлений щонайменше один блок датчиків для виявлення руху корпусу, який функціонально з'єднаний з блоком обробки та прийому/передачі даних на електронний пристрій, та маніпулятор виконаний з можливістю кочення та нахилу відносно горизонтальної осі. 2. Маніпулятор за п. 1, який відрізняється тим, що зовні корпус обладнаний щонайменше двома кільцями прокручування/натискання, які виконані з можливістю вільного обертання відносно корпусу та один від одного і функціонально з'єднані з блоком обробки та прийому/передачі даних на електронний пристрій. 3. Маніпулятор за одним із пп. 1-2, який відрізняється тим, що опорна поверхня для ніг оператора виконана у вигляді двох опорних циліндричних коліс, які виконані з можливістю обертання відносно зовнішньої поверхні корпусу та електрично з'єднані з електродвигунами, які встановлені в порожнині корпусу. 4. Маніпулятор за одним із пп. 1-3, який відрізняється тим, що колеса кочення обладнані датчиками тиску, які функціонально з'єднані з блоком обробки та прийому/передачі даних на електронний пристрій. 5. Маніпулятор за одним із пп. 1-4, який відрізняється тим, що в порожнину корпусу встановлені щонайменше два мікрофони, які функціонально з'єднані з блоком обробки та прийому/передачі даних на електронний пристрій. 6. Маніпулятор за одним із пп. 1-5, який відрізняється тим, що блок обробки та прийому/передачі даних на електронний пристрій виконаний у вигляді процесора або мікроконтролера, який виконаний з можливістю прийому вихідних сигналів з одного або декількох датчиків з блока датчиків для виявлення руху корпусу, про зміну тиску на поверхню коліс кочення, звукових сигналів з щонайменше одного мікрофона, та генерації і передачі керуючої інформації для керування роботою одного або більше процесів на електронному пристрої, підключеному до маніпулятора. 7. Маніпулятор за одним із пп. 1-6, який відрізняється тим, що по центру корпусу виконане кільцеве заглиблення з роз'ємом для підключення до електронного пристрою, яке призначене для кріплення кронштейна. 8. Спосіб керування електронним пристроєм, який полягає в тому, що формують керуючі дії, відповідні завданню по керуванню електронним пристроєм, і передають їх в електронний пристрій, який відрізняється тим, що формують керуючі дії шляхом зміни траєкторії руху корпусу маніпулятора в просторі за допомогою примусового переміщення шляхом пересування, штовхання, кочення та нахилу маніпулятора за допомогою ніг, відстежують за допомогою блока датчиків для виявлення руху поточні значення просторових координат, постійно визначають лінійне і кутове зміщення/прискорення корпусу маніпулятора від його початкового положення, виробляють сигнали керування, які через блок обробки та прийому/передачі даних передають на електронний пристрій. 9. Спосіб за п. 8, який відрізняється тим, що формують керуючі дії шляхом створення звукових коливань в порожнині корпусу маніпулятора, далі здійснюють аналіз звукових коливань, 7 UA 110191 C2 виробляють сигнали керування, які через блок обробки та прийому/передачі даних передають на електронний пристрій. 8 UA 110191 C2 9 UA 110191 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulator and method for controlling electronic device
Автори англійськоюZharkov Oleksiy Valeriyovych
Назва патенту російськоюМанипулятор для управления электронным устройством и способ управления электронным устройством
Автори російськоюЖарков Алексей Валериевич
МПК / Мітки
МПК: G06F 3/033, G06F 3/0346
Мітки: керування, електронним, спосіб, пристроєм, маніпулятор
Код посилання
<a href="https://ua.patents.su/12-110191-manipulyator-dlya-keruvannya-elektronnim-pristroehm-ta-sposib-keruvannya-elektronnim-pristroehm.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор для керування електронним пристроєм та спосіб керування електронним пристроєм</a>
Сенсорна смуга для управління електронним пристроєм
Номер патенту: 84754
Опубліковано: 25.10.2013
Автор: Морокко Олександр Ігорович
МПК: G06F 3/044, G06F 3/0488, G09G 3/00
Мітки: управління, пристроєм, смуга, електронним, сенсорна
Формула / Реферат:
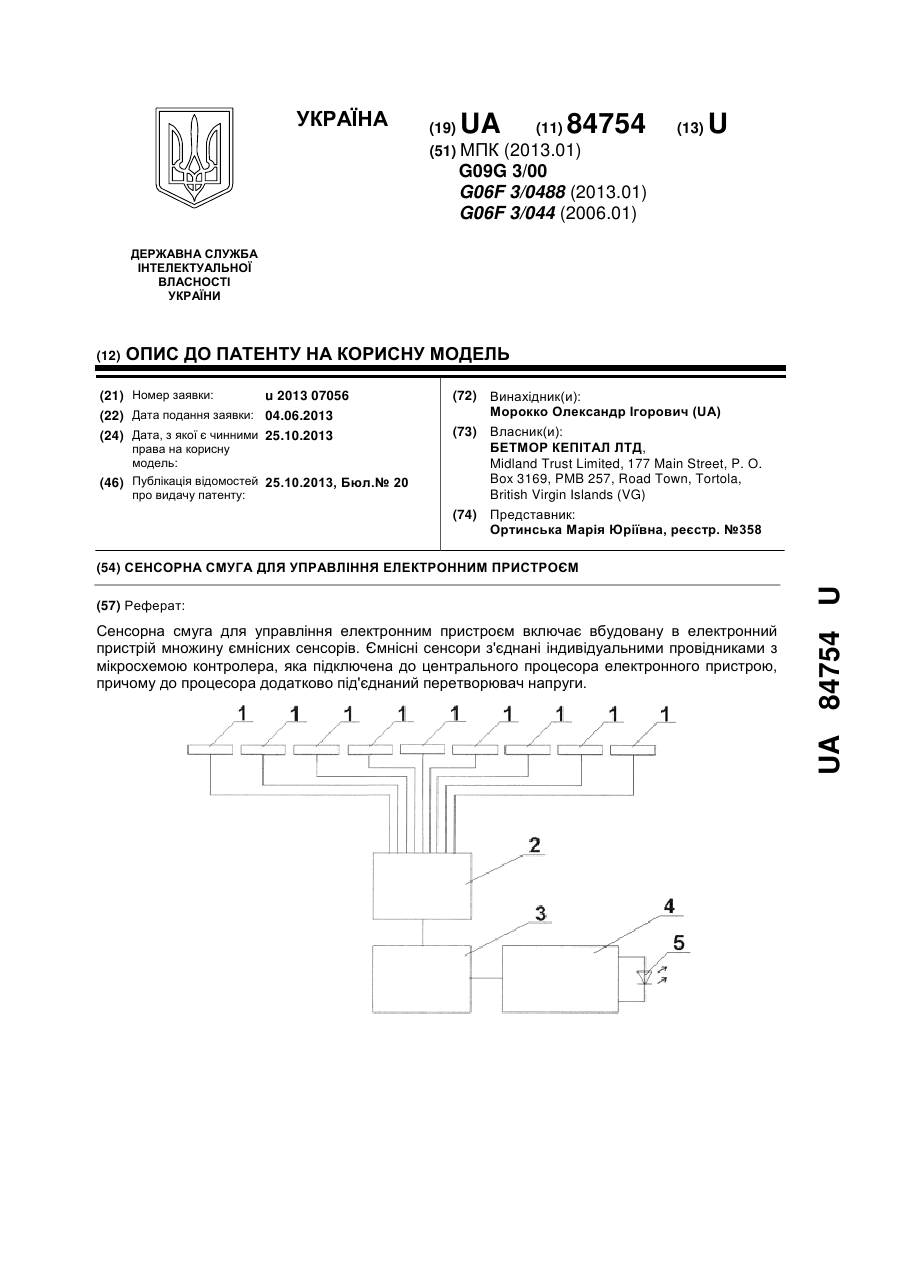
1. Сенсорна смуга для управління електронним пристроєм, що включає вбудовану в електронний пристрій множину ємнісних сенсорів, яка відрізняється тим, що ємнісні сенсори з'єднані індивідуальними провідниками з мікросхемою контролера, яка підключена до центрального процесора електронного пристрою, причому до процесора додатково під'єднаний перетворювач напруги.2. Сенсорна смуга за п. 1, яка відрізняється тим, що розташована над екраном...
Маніпулятор
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Табацков Вячеслав Петрович, Бергер Еміль Григорович, Бергер Євгеній Емильович, Іванов Геннадій Олександрович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Маніпулятор портативної радіостанції
Номер патенту: 30167
Опубліковано: 11.02.2008
Автор: Шепотько Павло Олександрович
МПК: H04B 1/44
Мітки: радіостанції, маніпулятор, портативної
Формула / Реферат:
Маніпулятор портативної радіостанції, що містить мікрофон, мікросхему і кнопку-тангенту, який відрізняється тим, що мікрофон і кнопка-тангента винесені за межі блока маніпулятора і з'єднані з ним провідною або безпровідною системою.
Спосіб керування автомобільним мультимедійним головним пристроєм
Номер патенту: 59484
Опубліковано: 10.05.2011
Автори: Тарадін Віталій Євгенович, Голубєв Олександр Анатолійович, Бабарикін Олексій Валентинович, Камбуров Артем Дмитрович, Ткаленко Андрій Олександрович, Алексєєв Олег Вадимович
МПК: B60R 25/00, B60R 99/00
Мітки: головним, керування, автомобільним, спосіб, мультимедійним, пристроєм
Формула / Реферат:
1. Спосіб керування автомобільним мультимедійним пристроєм, що включає керування на відстані, який відрізняється тим, що при натисненні користувачем на кнопку мобільного телефону створюється команда керування, яку у вигляді пакетних даних по радіочастотному каналу з використанням технології безпровідного зв'язку відправляють до RF-модуля зв'язку, де сигнал перетворюють і передають його на мікроконтролер, за допомогою якого виконують...
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Вігдергауз Леонід Павлович, Москаленко Олександр Володимирович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Попередній патент: Спосіб гідрування порошку магнію
Наступний патент: Незбалансована циліндрична магнетронна розпилююча система
Випадковий патент: Конструкція наповнювача для обмінної колони і спосіб його виготовлення