Маніпулятор
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Табацков Вячеслав Петрович, Бергер Еміль Григорович, Іванов Геннадій Олександрович, Бергер Євгеній Емильович
Формула / Реферат
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Текст
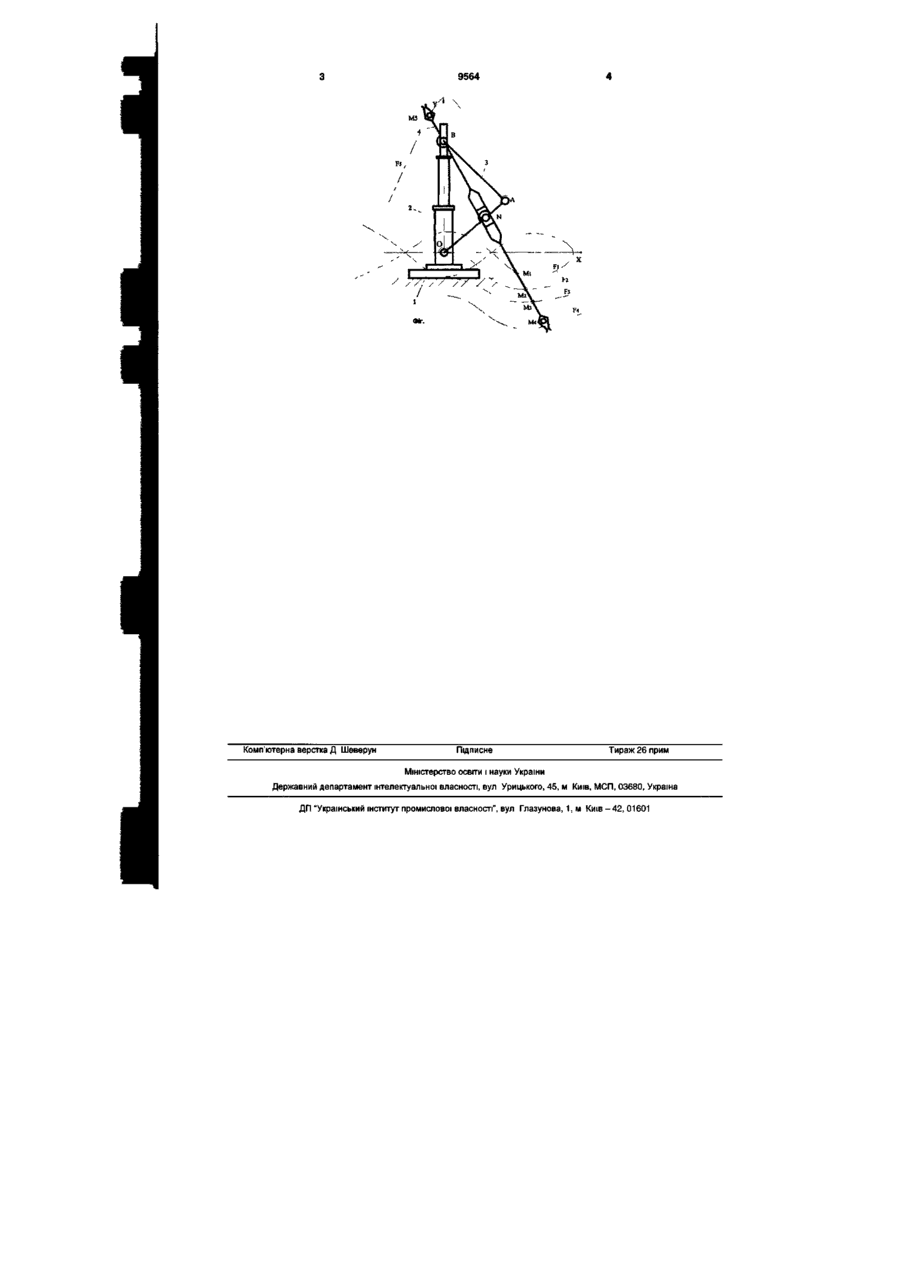
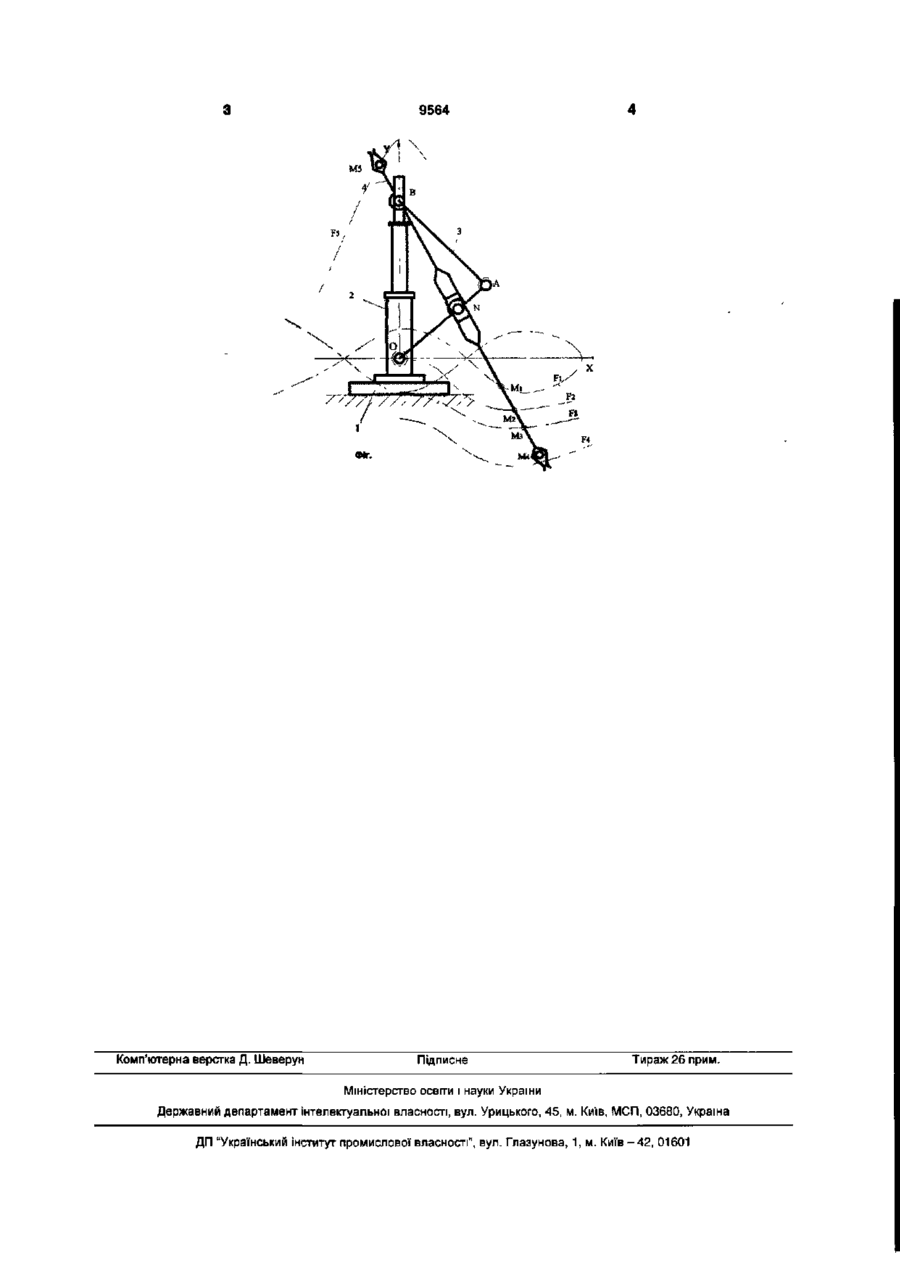
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипношатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами. Корисна модель відноситься до робототехніки і може бути використана в роботах, які потребують точного переміщення робочого органу (маніпулятора) по траєкторії полізомальних кривих. Відомий маніпулятор для виконання навантажувально-розвантажувальних робіт, зв'язаних з переміщенням робочого органу по прямолінійним траєкторіям, який містіть основу, пантограф, силовий циліндр, шток якого шарнірно з'єднаний з однією з двох бокових ланок пантографа, а також захватний пристрій [див. Авт. свид. №1514601 М. кл. B25J1/08; 11/00; бюл. №38, 15.10.89]. Недоліком цього маніпулятора є вузький діапазон переміщення робочого органу (тільки по прямолінійній траєкторії). Задачею корисної моделі є розширення робочої зони при забезпеченні полізомальних траєкторій переміщення захватного пристрою. Зазначена задача розв'язується тим, що маніпулятор, обладнаний основою з силовим циліндром, кривошипно-шатунним механізмом, ланки якого закріпляються шарнірно до штоку корпусу силового циліндра кулісою, яка забезпечена розміточними штифтами (Мі, ... Ms), або інструментами (газовим різаком, шліфувальним кругом і таке інше), а також захоплювачем руки робота (М 4 , М5). На Фіг. приведена кінематична схема маніпулятора. Маніпулятор містіть основу 1, на якій жорстко встановлено силовий циліндр 2, до якого шарнірами О і В кріпиться кривошипно-шатунний механізм З (ОАВ), одна ланка АВ якого зв'язана шарніром В, а друга ланка ОА шарніром N з кулісою 4, яка несе розміточні штифти Мі, ... Ms, або інструментами (газові різаки, шліфувальні круги і таке інше), а також захоплювач руки робота ( Ц та Ms). № Маніпулятор працює таким чином При висуванні штока силового циліндра 2 захоплюванний пристрій (М 4 , М5), а також розміточні штифти (Мт, Мг, М3) куліси переміщуються по траєкторіям полізомальних кривих: 2ап n 2 l 2 +4(1-n)x 2 Де для забезпечення траєкторії захоплювання по полізомальним кривим співвідношення розмірів ланок маніпулятора таке: ОА=АВ=а; ON=na; AN=(1-n)a; BM,=I1. Маніпулятор можна ефективно використати в конструкції робота, де інструмент або зхват переміщується по полізомальним кривим. ю о> О) 9564 Комп'ютерна верстка Д. Шеверун Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюManipulator
Автори англійськоюTabatskov Viacheslav Petrovych, Ivanov Hennadii Oleksandrovych, Berher Emil Hryhorovych
Назва патенту російськоюМанипулятор
Автори російськоюТабацков Вячеслав Петрович, Иванов Геннадий Александрович, Бергер Эмиль Григорьевич
МПК / Мітки
МПК: B25J 11/00
Мітки: маніпулятор
Код посилання
<a href="https://ua.patents.su/4-9564-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор</a>
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Вігдергауз Леонід Павлович, Москаленко Олександр Володимирович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Ковальський маніпулятор
Номер патенту: 5654
Опубліковано: 15.03.2005
Автори: Корчак Олена Сергіївна, Роганов Лев Леонідович
МПК: B21J 13/00
Мітки: маніпулятор, ковальський
Формула / Реферат:
Ковальський маніпулятор, що містить маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху і рух яким задається від приводу, який відрізняється тим, що оснащений додатковою колісною парою, що зв’язана з задньою колісною парою механізму пересування маніпулятора через регульований важіль, а з передньою - через важіль жорсткості, причому важелі оснащено...
Маніпулятор для установлення та знімання шиберних затворів
Номер патенту: 58993
Опубліковано: 15.08.2003
Автори: Музирін Олександр Олегович, Слівченко Анатолій Іванович
МПК: B22D 41/08, B25J 1/00
Мітки: знімання, шиберних, установлення, затворів, маніпулятор
Формула / Реферат:
Маніпулятор для установлення та знімання шиберних затворів, що містить нерухомий стояк, циліндр, на штоку якого встановлено з можливістю обертання стіл, важіль з вузлом кріплення циліндра,який відрізняється тим, що стіл додатково містить знімний пристрій для формування гнізда під сталерозливний вогнетривкий стакан, а вузол кріплення циліндра виконано у вигляді нерухомо закріпленого до торця важеля корпусу з пружиною, на яку встановлено...
Маніпулятор ручний

Номер патенту: 54126
Опубліковано: 17.02.2003
Автор: Черкащенко Григорій Миколайович
МПК: A01G 3/00
Мітки: маніпулятор, ручний
Формула / Реферат:
1. Маніпулятор ручний, що містить несучий елемент, виконаний у вигляді штанги, різальний ніж, розміщений на його кінці і жорстко прикріплений до нього, протирізальний ніж, що шарнірно з'єднаний з тягою, важіль управління, зв'язаний з тягою, який відрізняється тим, що робоча поверхня різального ножа виконана клиноподібної форми, а робоча поверхня протирізального ножа має прямокутну форму, при цьому робочі поверхні ножів зміщені одна відносно...
Маніпулятор для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами
Номер патенту: 9562
Опубліковано: 17.10.2005
Автори: Кондратенко Віктор Васильович, Рафалович Михайло Григорович, Бланар Олег Володимирович
МПК: G21F 5/00
Мітки: закриття, контейнерів, радіоактивними, кришок, маніпулятор, відкриття, первинних, відходами
Формула / Реферат:
1. Маніпулятор для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами, що містить механізм піднімання і опускання, захват кришки первинного контейнера, гайковерт для фіксації кришки на первинному контейнері, який відрізняється тим, що пальці жорстко з'єднані з планшайбою посаджені в отвори .рухомої плити з зазором.2. Маніпулятор за п. 1, який відрізняється тим, що планшайба з патроном установлені в обичайці з...
Попередній патент: Спосіб визначення граничної частоти потенціально-нестійкого чотириполюсника
Наступний патент: Пальник
Випадковий патент: Оборотний напівпровідниковий перетворювач постійної напруги в постійну із розділеною комутацією