Сільськогосподарська робоча система
Формула / Реферат
1. Сільськогосподарська робоча система із самохідною сільськогосподарською робочою машиною (1а), яка оснащена щонайменше одним начіпним знаряддям (1b), зокрема ґрунтообробним знаряддям, таким як плуг, культиватор або борона, причому привідний агрегат (2), який впливає на робочі колеса (4) за допомогою силового агрегату (3), та підпорядкований керувальному пристроєві (5) блок керування та індикації (6), яка відрізняється тим, що керувальний пристрій (5) виконаний з можливістю отримувати дані про навантаження від обертального моменту, яке виникає під час роботи, для щонайменше одного компонента трансмісії (3a-k), для привідних валів (3e, f, i, j) робочих коліс (4), і на основі отриманих даних про навантаження від обертального моменту виконує щонайменше одну керувальну функцію, причому під час роботи через конфігурацію приводу можна впливати на навантаження від обертального моменту у силовому агрегаті (3), і керувальний пристрій (5) на основі отриманих даних про навантаження від обертального моменту під час роботи оцінює конфігурацію приводу в залежності від конкретних цілей, таких як: мала ймовірність руйнування, номінальний термін служби та високу потужність, та надає команду оператору здійснити оцінку у відношенні щонайменше однієї цілі, і здійснює оптимізацію конфігурації приводу, і керувальний пристрій (5) із визначеного навантаження від обертального моменту визначає фактичний діапазон навантажень для силового агрегату (3), причому у пам'яті даних (10) керувального пристрою (5) принаймні частково протягом тривалого часу зберігається фактичний діапазон навантажень, зокрема при перевищенні розрахункового діапазону навантажень фактичним діапазоном навантажень, а при перевищенні розрахункового діапазону навантажень фактичним діапазоном навантажень дозволяє продовжити роботу тільки після підтвердження оператором.
2. Сільськогосподарська робоча система за п. 1, яка відрізняється тим, що щонайменше одна частина керувального пристрою (5) розміщена у робочій машині (1а) у вигляді машинного керування та, переважно, щонайменше одна частина керувального пристрою (5) у вигляді телеметричного керування та розміщена окремо від робочої машини (1а).
3. Сільськогосподарська робоча система за п. 1 або 2, яка відрізняється тим, що керувальний пристрій (5) виконаний з можливістю отримувати дані про навантаження від обертального моменту, стосовно щонайменше одного з компонентів трансмісії (3а-k), із скручування цього компонента (3а-k), що зумовлене обертальним моментом, переважно, отримання даних про скручування, що зумовлене обертальним моментом, здійснюється за допомогою датчика повороту (8а) антиблокувальної системи.
4. Сільськогосподарська робоча система за будь-яким з пп. 1-3, яка відрізняється тим, що у пам'яті даних (10) керувального пристрою (5) зберігаються руйнівні навантаження для щонайменше одного компонента трансмісії (3а-k), і керувальний пристрій (5) порівнює отримані дані про навантаження від обертального моменту із відповідними руйнівними навантаженнями та, базуючись на цьому порівнянні, здійснює оцінювання та/або оптимізацію конфігурації приводу, враховуючи постановку цілі малої ймовірності руйнування, причому у пам'яті даних (10) керувального пристрою (5) зберігається розрахунковий діапазон навантажень, якому відповідає номінальний термін служби силового агрегату (3), і керувальний пристрій (5) реєструє фактичне значення діапазону навантажень для силового агрегату (3) із отриманих даних про навантаження від обертального моменту та порівнює фактичне значення діапазону навантажень із розрахунковим діапазоном навантажень та, базуючись на порівнянні, здійснює оцінювання та/або оптимізацію конфігурації приводу, враховуючи постановку цілі номінального терміну служби, при цьому конфігурація приводу включає:
- баластування робочої машини (1а) і оцінювання та/або оптимізація стосується балансування,
- висоту точки прикладання тягової сили між робочою машиною та начіпним знаряддям (1b) і оцінювання та/або оптимізація стосується висоти точки прикладання тягової сили,
- тиск у шинах робочих коліс (4) і оцінювання та/або оптимізація стосується тиску у шинах.
5. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що у пам'яті даних (10) керувального пристрою (5) зберігаються параметри заданих та небезпечних робочих ситуацій, при цьому керувальний пристрій (5) надає команду оператору стосовно реєстрації робочої ситуації і здійснює змінення конфігурації приводу.
6. Сільськогосподарська робоча система за 5, яка відрізняється тим, що керувальний пристрій (5) реєструє:
- однобічне відносно до поздовжньої осі машини (13) навантаження від обертального моменту привідних валів (3е, f, і, j) робочих коліс (4) як "ситуацію перекидання",
- циклічне навантаження від обертального моменту, що збільшується, із заданою амплітудою коливань на привідних валах (3е, f, і, j) робочих коліс (4) як робочу ситуацію "резонансне коливання",
- виникнення навантаження на зсув через отримані дані про навантаження від обертального моменту на привідних валах (3е, f, і, j) робочих коліс (4) як робочу ситуацію "ситуацію зсуву",
- навантаження від обертального моменту, що збільшується у заданому об'ємі, як робочу ситуацію "ситуацію затору" начіпного знаряддя (1b).
7. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що керувальний пристрій (5) у разі роботи зі щонайменше одним причепом при зміненні отриманих даних про навантаження від обертального моменту привідних валів (3е, f, і, j) робочих коліс (4) налаштовує відповідне гальмування щонайменше одного причепа для уникнення втрати поздовжньої стійкості тягового зусилля.
8. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що у пам'яті даних (10) керувального пристрою (5) зберігаються дані номінального значення потужності привідного агрегату (2) і, базуючись на отриманих даних про навантаження від обертального моменту, отримуються дані про актуальну ефективну потужність привідного агрегату (2), які порівнюються із номінальними значеннями, при цьому керувальний пристрій (5) надає команду оператору стосовно будь-якого відхилення та/або зберігає отримані дані про відхилення.
9. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що у пам'яті даних (10) керувального пристрою (5) зберігається номінальне значення розподілу навантаження від обертального моменту на окремих привідних валах (3а-k) керувальний пристрій (5) на основі отриманих даних про навантаження від обертального моменту здійснює змінення конфігурації приводу, зокрема, за допомогою налаштування робочого гальма, керованої трансмісії, таким чином, щоб номінальне значення розподілу навантаження від обертального моменту могло б бути задане оператором.
10. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що керувальний пристрій (5) у гальмівному режимі базуючись на отриманих даних змінює конфігурацію приводу таким чином, що привідні вали (3е, f, і, j) робочих коліс (4) не мають навантаження від обертального моменту або мають гальмівне навантаження від обертального моменту.
11. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що передбачено щонайменше один механізм блокування диференціала (3d, 3h), який налаштовується за допомогою керувального пристрою (5), при цьому керувальний пристрій (5) здійснює блокування та/або розблокування механізму блокування диференціала (3d, 3h) виключно у такому стані, у якому отримані дані про навантаження від обертального моменту на обох підпорядкованих механізму блокування диференціала частинах силового агрегату допускають це, зокрема у такому стані, коли отримані дані про навантаження від обертального моменту на обох підпорядкованих механізму блокування диференціала частинах силового агрегату в основному є ідентичними.
12. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що керувальний пристрій (5) виконує функцію обчислення тривалості роботи для силового агрегату (3) та/або для окремих компонентів трансмісії (3а-k) та поряд із тривалістю роботи зберігаються також отримані дані про навантаження від обертального моменту, переважно, швидкість обчислення тривалості роботи задається керувальним пристроєм (5) залежно від навантаження.
13. Керувальний пристрій для сільськогосподарської робочої системи із самохідною сільськогосподарською робочою машиною (1а), причому робоча машина (1а) оснащена щонайменше одним начіпним знаряддям (1b), зокрема ґрунтообробним знаряддям, таким як: плуг, культиватор або борона, причому передбачений привідний агрегат (2) робочої машини (1а), який впливає на робочі колеса (4) за допомогою силового агрегату (3) та підпорядкований керувальному пристроєві (5) блок керування та індикації (6), який відрізняється тим, що керувальний пристрій (5) виконаний з можливістю визначати навантаження від обертального моменту, які виникають під час роботи, щонайменше одного компонента трансмісії (3а-k) для привідних валів (3е, f, і, j) робочих коліс (4), причому під час роботи робочої машини (1а) через конфігурацію приводу впливають на навантаження від обертального моменту у силовому агрегаті (3), при цьому керувальний пристрій (5) на основі отриманих даних про навантаження від обертального моменту, під час роботи, оцінює конфігурацію приводу в залежності від конкретних цілей, таких як: мала ймовірність руйнування, номінальний термін служби та високу потужність та надає команду оператору здійснити оцінку відносно щонайменше однієї цілі, і здійснює оптимізацію приводу, також керувальний пристрій (5) із визначеного навантаження від обертального моменту визначає фактичний діапазон навантажень для силового агрегату (3), причому у пам'яті даних (10) керувального пристрою (5) частково протягом тривалого часу зберігається фактичний діапазон навантажень, зокрема при перевищенні розрахункового діапазону навантажень фактичним діапазоном навантажень, а при перевищенні розрахункового діапазону навантажень фактичним діапазоном навантажень, керувальний пристрій (5) дозволяє роботу тільки після підтвердження оператором.
Текст
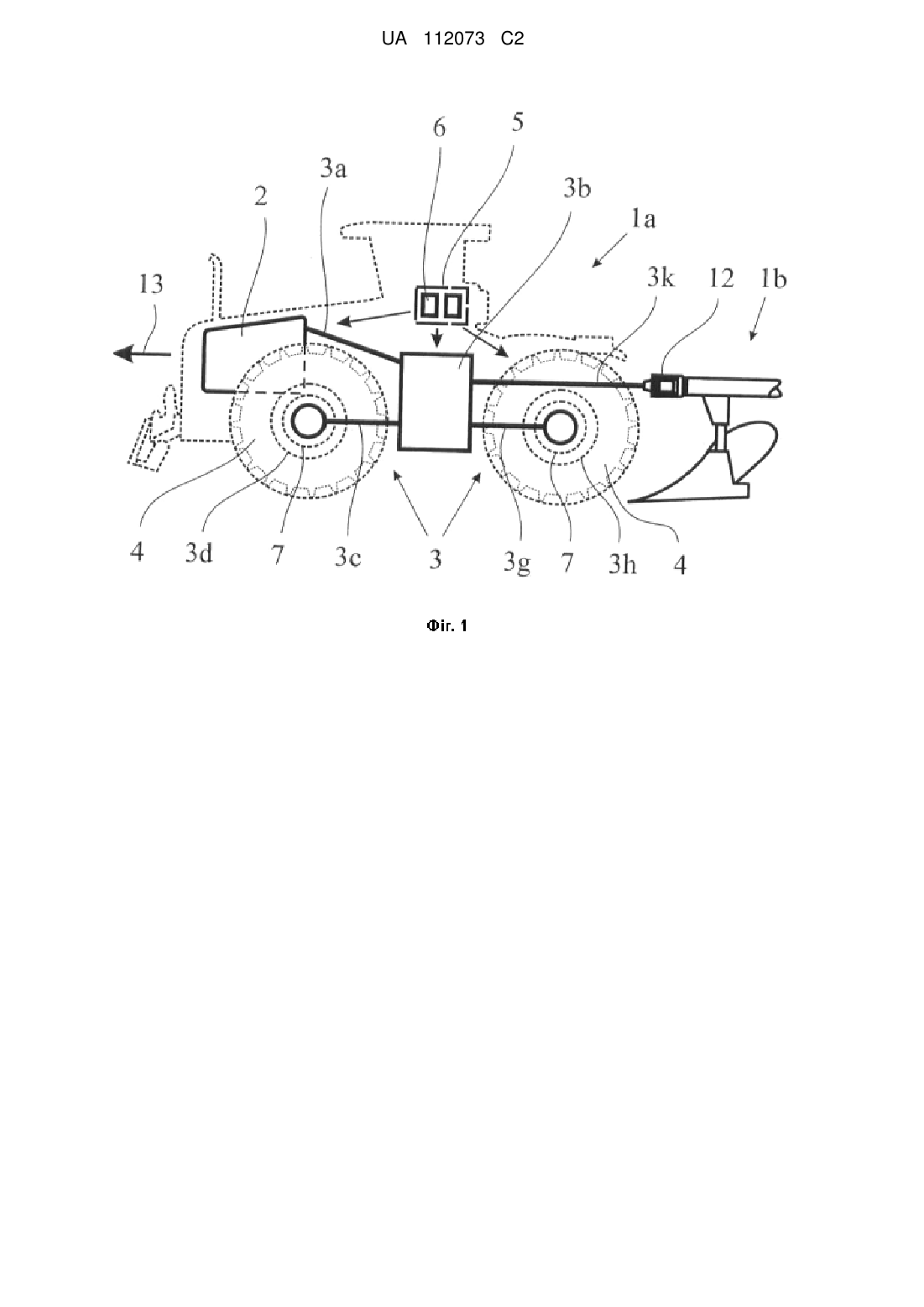
Реферат: Винахід стосується сільськогосподарської робочої системи з самохідною сільськогосподарською машиною (1а), яка оснащена щонайменше одним начіпним знаряддям (1b), зокрема ґрунтообробним знаряддям, таким як: плуг, культиватор або борона, причому передбачений повідний агрегат (2), який впливає на робочі колеса (4) за допомогою силового агрегату (3) і підпорядкований керувальному пристроєві (5) блок керування й індикації (6). Пропонується, щоб керувальний пристрій (5) отримував дані про навантаження від обертального моменту під час робочого режиму для щонайменше одного компонента трансмісії (3а-k), зокрема для повідних валів (3e, f, i, j) робочих коліс (4), та на основі отриманих даних про навантаження від обертального моменту виконував щонайменше одну керувальну функцію. UA 112073 C2 (12) UA 112073 C2 UA 112073 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід стосується сільськогосподарської робочої системи з самохідною сільськогосподарською робочою машиною відповідно до обмежувальної частини формули винаходу пункту формули винаходу 1, яка може бути оснащена щонайменше одним начіпним знаряддям, зокрема ґрунтообробним знаряддям, наприклад плугом, культиватором або бороною, а також пристрою керування для такої робочої системи відповідно до обмежувальної частини пункту 15 формули винаходу. У випадку таких робочих машин йдеться, наприклад, про трактори, автомобілі зі збільшеною навантажувальною висотою, зокрема телескопічні навантажувачі, проте також про самохідні збиральні машини подібного типу. Відома робоча система (ЕР 1 338 934 А1) оснащена трактором, який може бути оснащено різноманітними начіпними знаряддями. Для керування всіма значущими привідними компонентами, зокрема привідним механізмом двигуна, трансмісією, гальмовою установкою та ін. передбачений пристрій керування на основі мікропроцесора. Для введення та виведення інформації оператора у пристрої керування розміщено блок керування та індикації. На відміну від легкових та вантажних автотранспортних засобів конструктивне рішення сільськогосподарських машин відносно терміну служби має відповідати особливим вимогам. Причина цього полягає у великій кількості можливих начіпних знарядь, яка призводить до вкрай різноманітних навантажень привідного механізму робочої машини. Навіть для одного лише начіпного знаряддя навантаження може надзвичайно коливатися. Прикладом цього є начіпне знаряддя у вигляді плуга, яке залежно від властивостей ґрунту може призвести до найрізноманітніших навантажень. До того ж, згадувані сільськогосподарські робочі машини, як правило, баластуються з боку користувача. У разі невірного баластування, зокрема, на повідному валу робочих коліс можуть виникати небажано високі навантаження від обертального моменту за рахунок очікуваного терміну служби. Окрім цього, слід зважати на те, що робоча машина часто оснащена трансмісією з безступеневим регулюванням зниження кількості обертів (варіатором), через що двигун робочої машини у певній робочій точці може мати визначену, переважно максимальну ефективну потужність. При незначних швидкостях це може призвести до відповідно високих навантажень від обертального моменту на привідних валах робочих коліс. Задля забезпечення номінального терміну служби робочої машини у даному сенсі необхідно, щоб дотримувався діапазон навантажень, який лежав в основі конструктивного рішення робочої машини. Перевищення цього діапазону навантаження може призвести до скорочення терміну служби, якщо це перевищення не буде врівноважене відповідним зниженим навантаженням. Враховуючи вищезазначену варіативність та можливі помилки керування, які знов-таки призводять до підвищених навантажень, дотримання вищевказаного діапазону навантажень конструктивного рішення робочої машини з відомою робочою системою є необхідною вимогою. В основі винаходу лежить проблема такої розробки та втілення відомої сільськогосподарської робочої машини, при якому можна було б уникнути скорочення терміну служби, що викликано навантаженням. Вищезазначена проблема у випадку робочої машини вирішується відповідно до обмежувальної частини пункту 1 формули винаходу за допомогою ознак відмітної частини пункту 1 формули винаходу. Суттєвою є також думка про те, щоб керувальний пристрій отримував дані про навантаження від обертального моменту під час робочого режиму для щонайменше одного компонента трансмісії (3а-k), зокрема для привідних валів робочих коліс, та на основі отриманих даних про навантаження від обертального моменту виконував хоча б одну керувальну функцію. При цьому функція керування у найкращому втіленні слугує для усунення та/або уникнення руйнівного навантаження чи такого, яке викликає скорочення терміну служби компонентів трансмісії, таких як вищевказані повідні вали робочих коліс. Думка про перевірку окремих компонентів трансмісії сільськогосподарської робочої машини на місцеві навантаження від обертального моменту уможливлює цілеспрямований керувальнотехнічний вплив на навантаження робочої машини та при відповідному конструктивному виконанні цілеспрямоване дотримання номінального терміну служби робочої машини. Принципово пристрій керування може бути втілений у вигляді лише машинного керування та розміщений на робочій машині. Може також бути корисно, щоб хоча б одна частина пристрою керування була втілена у вигляді телеметричного керування, яке взаємодіє з блоком керування за допомогою радіозв'язку (пункт 2 формули винаходу). 1 UA 112073 C2 5 10 15 20 25 30 35 40 45 50 55 60 При найкращому втіленні відповідно до пункту 3 формули винаходу навантаження від обертального моменту визначається із перекручування відповідних компонентів трансмісії, яке зумовлене обертальним моментом. У найбільш доречному втіленні тут застосовуються і без того наявні датчики повороту антиблокувальної системи робочої машини. Для отримання абсолютного значення відповідного навантаження від обертального моменту спочатку вимірюються калібрувальні виміри при відомому навантаженні від обертального моменту, найкраще при нульовому навантаженні від обертального моменту. Вимірювання цього значення обертального моменту тоді проводиться відносно даних калібрувальних вимірів, таким чином у результаті з'являється абсолютне значення навантаження від обертального моменту. Цей вид визначення навантаження від обертального моменту принципово відомий (DE 10 2006 027 834 А1). Проте дане застосування відомого принципу вимірювання на самохідних сільськогосподарських машинах призводить насамперед до можливості цілеспрямованого дотримання заданого терміну служби за допомогою простих технічно-керувальних заходів. З найкращою, першою альтернативою в пункті 5 формули винаходу можна значно попередити руйнування компонентів трансмісії через надмірне навантаження від обертального моменту. При відповідному втіленні пристрою керування вже при наближенні виміряного навантаження від обертального моменту до відповідного руйнівного навантаження вживаються відповідні технічно-керувальні заходи. Другий варіант здійснення описаний пунктом 5 формули винаходу, передбачає порівняння фактичного діапазону навантажень з розрахунковим діапазоном навантажень, що лежить в основі робочої машини. У залежності від результатів цього порівняння керувальний пристрій вживає відповідних технічно-керувальних заходів. При цьому принципово можливо досягти номінального терміну служби робочої машини, так що забезпечується оптимальний робочий режим без виходу з ладу робочої машини до закінчення номінального терміну служби. Інші варіанти втілення за пунктами формули винаходу 7 та 8 стосуються низки робочих ситуацій, які можна виявити і за необхідності усунути, за допомогою системи керування на основі виміряних навантажень від обертального моменту. Подвійне використання виміряних навантажень від обертального моменту, а саме для забезпечення номінального терміну служби та для оптимізації робочих ситуацій, забезпечує високу економічність загального рішення. Після подальшого вивчення відповідно до пункту 15 формули винаходу, якому належить особливе значення, керувальний пристрій вищеописаної робочої системи функціонує як такий. Цей керувальний пристрій може, як зазначено вище, бути виконаний як орган керування машиною або частково у вигляді телеметричного пристрою керування. Далі винахід пояснюється докладніше за допомогою прикладу втілення, що його наведено на кресленні. Його демонструють: Фіг. 1 на принциповій схемі важливі компоненти сільськогосподарської робочої системи відповідно до пропозиції із сільськогосподарською робочою машиною, включаючи начіпне знаряддя, у бічній проекції, та Фіг. 2 робоча машина відповідно до Фіг. 1 у горизонтальній проекції. Для втілення наведеної робочої машини 1а сільськогосподарської робочої системи згідно з винаходом можливі численні варіанти. Було вже вказано на те, що у випадку робочої машини 1а може йтися про трактор, автомобілі зі збільшеною висотою навантаження, зокрема телескопічні навантажувачі, проте також про самохідні збиральні машини подібного типу. Робочу машину 1а можна оснащувати низкою начіпних знарядь. У випадку начіпного знаряддя 1b у будь-якому разі може йтися про ґрунтообробне знаряддя, наприклад, плуг (Фіг. 1), культиватор або борону. Можливі інші начіпні знаряддя 1, наприклад, машини для збирання сіна, машини для сіяння та інші знаряддя такого типу. Робоча машина 1а оснащена привідним агрегатом 2, який тут та найкраще принципово складається з дизельного двигуна. Привідний агрегат 2 через силовий агрегат 3 звичайним чином впливає на робочі колеса 4, тут та найкраще у кількості чотирьох. Найкраще у випадку робочої машини 1а йдеться про повнопривідну робочу машину 1а, таким чином всі чотири колеса є веденими або ведучими. Робочі колеса 4 на наведеному та найкращому прикладі втілення мають ідентичні номінальні діаметри. Принципово робочі колеса 4 також можуть мати різні номінальні діаметри. Зокрема привідний агрегат 2 за допомогою привідного вала 3а з'єднується з найкраще безступеневою трансмісією 3b, яка передає потужність приводу через привідний вал 3с та диференційний механізм 3d на обидва привідні вали 3е та 3f передніх робочих коліс 4 та через привідний вал 3g через диференційний механізм 3n на привідні вали 3і та 3j задніх робочих коліс 4. Далі передбачено вал відбору потужності 3k, який також виходить з трансмісії 3b та може слугувати для приводу відповідного начіпного знаряддя 1b. 2 UA 112073 C2 5 10 15 20 25 30 35 40 45 50 55 60 Для керування компонентами, що важливі для трансмісії, передбачено керувальний пристрій 5 та блок керування та індикації 6, підпорядкований керувальному пристроєві 5. У випадку керованих компонентів, що важливі для трансмісії, тут йдеться про вищезазначені привідний агрегат 2, трансмісію 3b, обидва диференційні механізми 3d, 3h, а також про інші компоненти, які є важливими для трансмісії, зокрема про гальмівну систему 7 та ін. Важливим є те, щоб керувальний пристрій 5 визначав навантаження від обертального моменту, які виникають під час роботи, хоча б для одного компонента трансмісії 3а-k, тут та найкраще для привідних валів 3е, f, і, j робочих коліс 4 та на основі визначених навантажень від обертального моменту виконував хоча б керувальну функцію, тут та найкраще керувальну функцію для усунення та/або уникнення руйнівного навантаження або такого, яке скорочує термін служби компонентів трансмісії. Тут та найкраще у випадку керувального пристрою 5 йдеться про саме машинне керування, яке повністю розміщено у робочій машині 1а. Проте може також бути найкращим таке розміщення, при якому щонайменше одна частина керувального пристрою 5 втілена у вигляді телеметричного керування та розміщена окремо від робочої машини 1а. Телеметричне керування може бути розміщене окремо від робочої машини 1а в адміністративній будівлі споживача та взаємодіяти з машинною частиною керувального пристрою 5 за допомогою радіозв'язку. Визначення навантажень від обертального моменту принципово може бути передбачене під час усієї роботи робочої машини 1а. Таким чином забезпечується реагування на будь-яке навантаження від обертального моменту, яке представляє надмірне навантаження силового агрегату 3. Принципово можливе також визначення навантажень від обертального моменту у задані проміжки часу або у тригерному режимі за допомогою визначеної наперед події, наприклад, події керування. При наведеному та таким чином найкращому прикладі втілення спостереження ведеться виключно за привідними валами 3е, f, і, j робочих коліс 4, враховуючи їхнє навантаження від обертального моменту. Додатково може бути також передбачено, що вал відбору потужності 3k або привідні вали 3а, 3с та 3g також спостерігаються. У найкращому втіленні отримання даних про навантаження від обертального моменту, що стосується компонентів трансмісії 3е, f, і, j походить від скручування відповідних компонентів трансмісії 3е, f, і, j, що зумовлене обертальним моментом. Тут та найкраще отримання даних скручування, зумовленого обертальним моментом, відбувається при використанні датчиків поворотів 8а, 8b, що розташовані на відстані вздовж компонентів трансмісії 3е, f, і, j. У випадку датчиків поворотів 8а, 8b може йтися, наприклад, про датчики кута повороту або про датчики частоти обертів, причому в останньому випадку найкраще необхідно вжити заходів, зокрема відлік часу для отримання даних про різницю кутів між обома датчиками кута оберту. На Фіг. 2 у випадку датчика 8а йдеться про датчик повороту антиблокувальної системи, що призводить до рентабельної конструкції. Можна вказати на те, що датчики, передбачені для отримання даних про навантаження від моменту обертального моменту 8а, 8b на Фіг. 2 наведені лише для правого верхнього робочого колеса 4. Усі провідні вали 3е, f, і, j робочих коліс 4 на наведеному прикладі втілення оснащені відповідно парою таких датчиків повороту. Робочій машині 1а у робочому режимі призначена конфігурація приводу. Конфігурація приводу включає всі машинозалежні, керувально-технічні та механічні параметри, які впливають на навантаження від обертального моменту в силовому агрегаті 3 під час робочого режиму. Таким чином, конфігурація приводу включає, наприклад, налаштування привідного агрегату 2, враховуючи налаштування потужності, керування трансмісією, баластування тощо. Найкраще керувальний пристрій 5 на основі отриманих даних про навантаження від обертального моменту розраховує показники та/або оптимізацію приводної конфігурації, враховуючи різноманітні цілі, наприклад малу ймовірність руйнування, номінальний термін служби та/або високу потужність пристроїв. Далі найкраще керувальний пристрій 5 дає підказку користувачеві для оцінювання та/або оптимізації, враховуючи щонайменше одну постановку цілі. Як альтернатива або додатково керувальний пристрій 5 сам здійснює оптимізацію приводної конфігурації за допомогою відповідного налаштування зокрема компонентів двигуна, у разі, якщо наявні відповідні автоматичні функції, наприклад автоматичне баластування тощо. Отримання даних про вищевказане оцінювання та/або оптимізацію найкраще відбувається залежно від типу використовуваного начіпного знаряддя 1b. Наприклад, важливі параметри відомих начіпних знарядь 1b можуть зберігатися у пам'яті даних керувального пристрою 5. Наведений силовий агрегат 3 має трансмісію 3b, яка щонайменш в одній частині силового агрегату втілена у вигляді варіатора 9. Зниження кількості обертів варіатора 9 налаштовується безступенево за допомогою керувального пристрою 5. У режимі роботи керувальний пристрій 5 3 UA 112073 C2 5 10 15 20 25 30 35 40 45 50 55 60 налаштовує привідний агрегат 2 на постійну ефективну потужність, при якій найкраще йдеться про максимальну ефективну потужність. Таким чином гарантується, що привідний агрегат 2 завжди працює в оптимальному режимі. Змінення швидкості руху відповідно витікає зі змінюваного налаштування зниження кількості обертів варіатора 9, що залежить від установок оператора, зокрема від задіяння оператором педалі акселератора. Керувальний пристрій 5 на кресленні визначений як центральний керувальний пристрій 5, який має пам'ять даних 10 та мікропроцесор 11. Керувальний пристрій 5 може бути щонайменше частково децентралізованим, як вказано вище. У цьому відношенні наведення на кресленні слід розуміти виключно як зазначення структури керування. Для запобігання, наприклад, руйнуванню повідних валів 3е, f, і, j керувальний пристрій 5 у найкращому втіленні реєструє приближения ситуації навантаження до ситуації руйнування. Пропонується, щоб в пам'яті даних 10 керувального пристрою 5 для різних компонентів трансмісії 3е, f, і, j зберігалися відповідні руйнівні навантаження, причому керувальний пристрій 5 порівнює отримані дані про навантаження від обертального моменту відповідно до пропозиції з відповідними руйнівними навантаженнями та на основі цього порівняння виконує оцінювання та/або оптимізацію конфігурації приводу, враховуючи цільові параметри малої ймовірності руйнування. У найпростішому випадку можливо було б зменшити ефективну потужність повідного агрегату 2. Інша можливість полягає у варіюванні розподілення обертального моменту між валами 3с та 3g за допомогою відповідного налаштування трансмісії 3b. Проте принципово можливо було б також залишити прості підказки користувачеві для того, щоб оператор самостійно міг вживати потрібних заходів. У найкращому втіленні, при якому пріоритетним є дотримання номінального терміну служби робочої машини 1а, спочатку пропонується, щоб у пам'яті даних 10 керувального пристрою 5 зберігався розрахунковий діапазон навантажень. У випадку розрахункового діапазону навантажень йдеться про такий діапазон навантажень, який лежав в основі конструктивного рішення робочої машини 1а, враховуючи номінальний термін служби. Приклад отримання даних про такий діапазон навантажень наведено у публікації «Отримання даних про діапазони навантажень, що залежать від процесів, гідростатичного транспортного силового агрегату на прикладі телескопічного трапу», Андреас Хубер, серія видань про системну техніку транспортних засобів, том 2, 2010, Карлсруе, ISBN 978-3-86644-564-2. Цікавим є, що керувальний пристрій 5 визначає фактичне значення діапазону навантажень для силового агрегату 3 із отриманих даних про навантаження від обертального моменту відповідно до пропозиції, тут для компонентів трансмісії 3е, f, і, j. Керувальний пристрій 5 порівнює фактичне значення діапазону навантажень найкраще у безперервному режимі з розрахунковим діапазоном навантажень. На основі порівняння керувальний пристрій 5 здійснює оцінювання та/або оптимізацію, враховуючи постановку цілі номінального терміну служби. У найкращому втіленні керувальний пристрій 5 проводить оптимізацію та на основі порівняння налаштовує повідні компоненти для відповідного змінення конфігурації приводу. Як альтернатива або додатково може бути також передбачено надання підказки користувачеві, враховуючи результат порівняння. Зокрема враховуючи перевірку рекламаційних претензій в одному варіанті передбачено, щоб у пам'яті даних керувального пристрою 5 хоча б частково протягом тривалого часу зберігалось фактичне значення діапазону навантажень, зокрема під час перевищення розрахункового діапазону навантажень фактичним значенням діапазону навантажень. З огляду на це найкраще було б, щоб керувальний пристрій 5 дозволяв постійну роботу при перевищенні розрахункового діапазону навантажень фактичним значенням діапазон у навантажень тільки після підтвердження оператором. Таке підтвердження найкраще також зберігається протягом тривалого часу в пам'яті даних 10. У разі, якщо фактичне значення діапазону навантажень постійно знаходиться нижче за розрахунковий діапазон навантажень, можна розраховувати на дотримання номінального терміну служби, який ґрунтується на розрахунковому діапазоні навантажень. Якщо фактичне значення діапазону навантажень знаходиться вище розрахункового діапазону навантажень, очікуваний термін служби зменшується; таким чином, необхідно вжити відповідних заходів. Один з таких можливих заходів полягає у зменшенні ефективної потужності провідного агрегату 2. Інша можливість полягає в оптимізації баластування робочої машини 1а. Як зазначено вище, конфігурація приводу включає баластування робочої машини 1а, за допомогою якого можна варіювати вагове навантаження робочих коліс 4 за допомогою додаткової ваги. Відповідно вищевказана оптимізація конфігурації приводу найкраще стосується також баластування. Принципово можливо, щоб керувальний пристрій 5 з урахуванням отриманих даних про навантаження від обертального моменту визначав змінення 4 UA 112073 C2 5 10 15 20 25 30 35 40 45 50 55 баластування для усунення та/або уникнення руйнівного навантаження чи такого, що скорочує термін служби компонентів трансмісії 3е, f, і, j. Наприклад, баластування є невірним, якщо на передніх колесах 4 знаходиться особливо високе навантаження, у той час як задні робочі колеса 4 зазнають особливо низького навантаження або навіть працюють у режимі буксування. У такому випадку переднє баластування повинно бути зменшене, а заднє баластування збільшене. Принципово керувальний пристрій 5 може проводити змінення баластування за допомогою автоматичної баластувальної системи, при якій найкраще йдеться про двигунну баластувальну систему. Як альтернатива або додатково може бути передбачено, що керувальний пристрій 5 надає підказку користувачеві стосовно змінення баластування. У такому випадку оператор може змінити баластування звичайним чином уручну. Інший найкращий варіант оптимізації розподілу обертального моменту полягає в оптимізації точки докладання тягової сили 12 між робочою машиною 1а та начіпним знаряддям 1b, якщо ця точка докладання тягової сили 12 може бути зрегульована за висотою. Таким чином, висота точки докладання тягової сили належить до конфігурації приводу та її стосується вищезазначена оптимізація. За допомогою регулювання за висотою точки докладання тягової сили можна керувати розподілом обертального моменту між передньою та задньою віссю без негативного впливу на робочий режим. Відповідно до пропозиції керувальний пристрій 5 з урахуванням отриманих даних про навантаження від обертального моменту визначає змінення висоти точки докладання тягової сили 12 для усунення та/або уникнення руйнівного навантаження чи такого, що скорочує термін служби компонентів трансмісії 3е, f, і, j, причому змінення висоти принципово може проводитися за допомогою двигуна, за умови керування керувальним пристроєм 5. Тут та найкраще керувальний пристрій 5 надає підказку користувачеві стосовно змінення висоти точки докладання тягової сили 12, на основі якої оператор може здійснити ручне налаштування висоти точки докладання тяглової сили. Насамкінець, можливо, щоб розподіл навантаження проводився за допомогою змінення тиску в шинах робочих коліс 4, яке знов-таки належить конфігурації приводу та може бути оптимізоване у вищезазначеному сенсі. Найкраще керувальний пристрій 5 визначає змінення тиску в шинах на основі отриманих даних про навантаження від обертального моменту відповідно до пропозиції, яке дає заданий розподіл навантаження для провідних валів 3е, f, і, j, причому в одному варіанті керувальний пристрій 5 надає підказку користувачеві стосовно змінення тиску в шинах. Як альтернатива або додатково може також бути передбачено, що керувальний пристрій 5 здійснює змінення тиску в шинах за допомогою системи контролю шин з компресором. Проте дані про навантаження від обертального моменту, отримані відповідно до пропозиції, можна використовувати не тільки з точки зору уникнення руйнування компонентів трансмісії або дотримання номінального терміну служби робочої машини 1а. Дані про навантаження від обертального моменту, отримані відповідно до пропозиції, слугують також для отримання даних про задані робочі ситуації, параметри яких відповідно до пропозиції зберігаються у пам'яті даних 10 керувального пристрою 5. У випадку таких робочих ситуацій йдеться насамперед про небезпечні робочі ситуації. Найкраще було б, щоб керувальний пристрій 5 надавав підказку користувачеві стосовно отримання даних про робочу ситуацію та/або щоб керуючий пристрій 5 протидіяв робочій ситуації зокрема за допомогою змінення конфігурації приводу. У випадку робочої ситуації йдеться, наприклад, про так звану «ситуацію перекидання», при якій робоча машина 1а нахиляється на бік відносно поздовжньої осі машини 13. Ця ситуація перекидання виражається однобічним навантаженням від обертального моменту провідних валів 3е, f, і, j відносно поздовжньої осі машини 13, причому керувальний пристрій 5 також надає підказку користувачеві стосовно роботи у режимі нахилу. Як альтернатива або додатково може бути передбачено, що керувальний пристрій 5 здійснює керування для зменшення ризику перекидання. Інша робоча ситуація описується як «резонансне коливання». Воно реєструється керувальним пристроєм 5 як циклічне навантаження від обертального моменту, що збільшується, із заданою амплітудою коливань на провідних валах 3е, f, і, j робочих коліс 4. Базуючись на цих даних проти такої робочої ситуації вживаються керувально-технічні, тут та найкраще антициклічні заходи. При цьому може йтися про антициклічне змінення ефективної потужності повідного агрегату 2 або про відповідне антициклічне гальмування за допомогою гальмівної системи 7. Інша найкраща можливість полягає у зміненні керувальним пристроєм 5 висоти точки докладання тягової сили між робочою машиною 1а та начіпним знаряддям 1b для усунення такого стану. 5 UA 112073 C2 5 10 15 20 25 30 35 40 45 50 55 Робоча ситуація «Ситуація тяги» має особливе значення для руху ухилом. Тут внаслідок тяги, зумовленої силою тяжіння, може дійти до негативного ковзання, причому оператор може не помітити цього. За допомогою реєстрації навантаження від обертального моменту відповідно до пропозиції ця робоча ситуація може бути легко зареєстрована та доведена до відома оператора за допомогою підказки користувачеві. Ще одна робоча ситуація позначається як «ситуація затору», при якій плуг затримується землею. Пов'язане з цим навантаження від обертального моменту, яке зростає, що рухається в заданому об'ємі, що зберігається у пам'яті даних 10 керувального пристрою 5, реєструється керувальним пристроєм 5 як «ситуація затору». Відповідна підказка користувачеві найкраще надається за допомогою блока керування та індикації 6. Як альтернатива або додатково керувальний пристрій 5 може, наприклад, змінювати робочу глибину начіпного знаряддя 1b, тут плуга, для усунення цього стану. Найкраще застосування отриманих даних про навантаження від обертального моменту привідних валів 3е, f, і, j робочих коліс 4 виявляється, коли робоча машина 1а працює зі щонайменше одним, не наведеним тут, причепом. Це насамперед стосується уникнення вигинання тягового зусилля, якщо щонайменше один причеп під час руху ухилом переміщується на робочу машину 1а. Ситуація тяги реєструється керувальним пристроєм 5 як зазначено вище. Базуючись на цій реєстрації передбачено, що керувальний пристрій 5 налаштовує відповідне гальмування щонайменше одного причепа для уникнення вигинання тягового зусилля. Дані про навантаження від обертального моменту, отримані відповідно до пропозиції, можна також застосовувати для перевірки ефективної потужності провідного агрегату 2. Найкраще у пам'яті даних 10 керувального пристрою 5 повинні зберігатися номінальні значення потужності провідного агрегату 2, причому, базуючись на отриманих даних про навантаження від обертального моменту, отримуються дані про актуальну ефективну потужність провідного агрегату 2, які порівнюються із номінальними даними про потужність. Внаслідок цього керувальний пристрій 5 надає підказку користувачеві стосовно відповідного відхилення. Як альтернатива або додатково може бути передбачене зберігання даних про відповідне відхилення. При цьому цікавими є не тільки відхилення у менший, але й відхилення у більший бік, які вказують на заходи з підвищення потужності, що їх вживає користувач. Такі заходи з підвищення потужності зазвичай обмежують рекламаційні претензії, таким чином вищезазначене зберігання даних про відхилення може бути цікавим. На основі реєстрації даних про навантаження від обертального моменту можна також регулювати розподіл обертальних моментів між окремими привідними валами 3е, f, і, j. Для цього у надзвичайно простий спосіб може бути використане номінальне значення розподілу обертального моменту на окремих привідних валах 3е, f, і, j. У найкращому втіленні номінальне значення розподілу обертального моменту задається оператором за допомогою блока керування та індикації 6. Дані про навантаження від обертального моменту, отримані відповідно до пропозиції, можуть бути враховані також для гальмівного режиму роботи. Найкраще керувальний пристрій 5 керує компонентами приводу таким чином, що привідні вали 3е, f, і, j робочих коліс 4 не мають навантаження від обертального моменту або мають гальмівне навантаження від обертального моменту. Таким чином, гарантується, що привідний агрегат 2 не працює проти гальмівної системи 7. Найкраще робоча машина 1а оснащується щонайменше одним механізмом блокування диференціала 3d, 3h, який налаштовується за допомогою керувального пристрою 5, причому керувальний пристрій 5 здійснює блокування та/або розблокування механізму блокування диференціала 3d, 3h виключно у такому стані, у якому отримані дані про навантаження від обертального моменту відповідно до пропозиції на обох підпорядкованих механізму блокування диференціала 3d, 3h частинах силового агрегату 3е, f, і, j конструктивно допускають блокування або розблокування. Це відбувається найкраще у тому випадку, коли отримані дані про навантаження від обертального моменту відповідно до пропозиції на обох підпорядкованих механізму блокування диференціала 3d, 3h частинах силового агрегату 3е, f, і, j в основному є ідентичними. Таким чином, оператор звільняється від задання вибору правильного моменту часу для блокування або розблокування механізму блокування диференціала 3d, 3h уручну. Цікавим є також оснащення керувального пристрою 5 функцією обчислення тривалості роботи для силового агрегату 3 або для окремих компонентів трансмісії. При цьому найкраще передбачено, що поряд із тривалістю роботи зберігаються також отримані дані про навантаження від обертального моменту. У найкращому втіленні швидкість обчислення тривалості роботи задається керувальним пристроєм 5 залежно від навантаження. Тут можливі 6 UA 112073 C2 5 різноманітні варіанти. Суттєвим є здійснення оцінювання тривалості роботи залежно від навантаження. Це приводить до особливо правдоподібного оцінювання тривалості роботи. Після подальшого вивчення, якому належить самостійне значення, керувальний пристрій 5 функціонує як такий. Можна робити посилання на усі втілення до робочої системи відповідно до пропозиції, які є придатними для опису керувального пристрою 5. ФОРМУЛА ВИНАХОДУ 10 15 20 25 30 35 40 45 50 55 60 1. Сільськогосподарська робоча система із самохідною сільськогосподарською робочою машиною (1а), яка оснащена щонайменше одним начіпним знаряддям (1b), зокрема ґрунтообробним знаряддям, таким як плуг, культиватор або борона, причому привідний агрегат (2), який впливає на робочі колеса (4) за допомогою силового агрегату (3), та підпорядкований керувальному пристроєві (5) блок керування та індикації (6), яка відрізняється тим, що керувальний пристрій (5) виконаний з можливістю отримувати дані про навантаження від обертального моменту, яке виникає під час роботи, для щонайменше одного компонента трансмісії (3a-k), для привідних валів (3e, f, i, j) робочих коліс (4), і на основі отриманих даних про навантаження від обертального моменту виконує щонайменше одну керувальну функцію, причому під час роботи через конфігурацію приводу можна впливати на навантаження від обертального моменту у силовому агрегаті (3), і керувальний пристрій (5) на основі отриманих даних про навантаження від обертального моменту під час роботи оцінює конфігурацію приводу в залежності від конкретних цілей, таких як: мала ймовірність руйнування, номінальний термін служби та високу потужність, та надає команду оператору здійснити оцінку у відношенні щонайменше однієї цілі, і здійснює оптимізацію конфігурації приводу, і керувальний пристрій (5) із визначеного навантаження від обертального моменту визначає фактичний діапазон навантажень для силового агрегату (3), причому у пам'яті даних (10) керувального пристрою (5) принаймні частково протягом тривалого часу зберігається фактичний діапазон навантажень, зокрема при перевищенні розрахункового діапазону навантажень фактичним діапазоном навантажень, а при перевищенні розрахункового діапазону навантажень фактичним діапазоном навантажень дозволяє продовжити роботу тільки після підтвердження оператором. 2. Сільськогосподарська робоча система за п. 1, яка відрізняється тим, що щонайменше одна частина керувального пристрою (5) розміщена у робочій машині (1а) у вигляді машинного керування та, переважно, щонайменше одна частина керувального пристрою (5) у вигляді телеметричного керування та розміщена окремо від робочої машини (1а). 3. Сільськогосподарська робоча система за п. 1 або 2, яка відрізняється тим, що керувальний пристрій (5) виконаний з можливістю отримувати дані про навантаження від обертального моменту, стосовно щонайменше одного з компонентів трансмісії (3а-k), із скручування цього компонента (3а-k), що зумовлене обертальним моментом, переважно, отримання даних про скручування, що зумовлене обертальним моментом, здійснюється за допомогою датчика повороту (8а) антиблокувальної системи. 4. Сільськогосподарська робоча система за будь-яким з пп. 1-3, яка відрізняється тим, що у пам'яті даних (10) керувального пристрою (5) зберігаються руйнівні навантаження для щонайменше одного компонента трансмісії (3а-k), і керувальний пристрій (5) порівнює отримані дані про навантаження від обертального моменту із відповідними руйнівними навантаженнями та, базуючись на цьому порівнянні, здійснює оцінювання та/або оптимізацію конфігурації приводу, враховуючи постановку цілі малої ймовірності руйнування, причому у пам'яті даних (10) керувального пристрою (5) зберігається розрахунковий діапазон навантажень, якому відповідає номінальний термін служби силового агрегату (3), і керувальний пристрій (5) реєструє фактичне значення діапазону навантажень для силового агрегату (3) із отриманих даних про навантаження від обертального моменту та порівнює фактичне значення діапазону навантажень із розрахунковим діапазоном навантажень та, базуючись на порівнянні, здійснює оцінювання та/або оптимізацію конфігурації приводу, враховуючи постановку цілі номінального терміну служби, при цьому конфігурація приводу включає: - баластування робочої машини (1а) і оцінювання та/або оптимізація стосується балансування, - висоту точки прикладання тягової сили між робочою машиною та начіпним знаряддям (1b) і оцінювання та/або оптимізація стосується висоти точки прикладання тягової сили, - тиск у шинах робочих коліс (4) і оцінювання та/або оптимізація стосується тиску у шинах. 5. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що у пам'яті даних (10) керувального пристрою (5) зберігаються параметри заданих та небезпечних робочих ситуацій, при цьому керувальний пристрій (5) надає команду оператору стосовно реєстрації робочої ситуації і здійснює змінення конфігурації приводу. 7 UA 112073 C2 5 10 15 20 25 30 35 40 45 50 55 60 6. Сільськогосподарська робоча система за п. 5, яка відрізняється тим, що керувальний пристрій (5) реєструє: - однобічне відносно до поздовжньої осі машини (13) навантаження від обертального моменту привідних валів (3е, f, і, j) робочих коліс (4) як "ситуацію перекидання", - циклічне навантаження від обертального моменту, що збільшується, із заданою амплітудою коливань на привідних валах (3е, f, і, j) робочих коліс (4) як робочу ситуацію "резонансне коливання", - виникнення навантаження на зсув через отримані дані про навантаження від обертального моменту на привідних валах (3е, f, і, j) робочих коліс (4) як робочу ситуацію "ситуацію зсуву", - навантаження від обертального моменту, що збільшується у заданому об'ємі, як робочу ситуацію "ситуацію затору" начіпного знаряддя (1b). 7. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що керувальний пристрій (5) у разі роботи зі щонайменше одним причепом при зміненні отриманих даних про навантаження від обертального моменту привідних валів (3е, f, і, j) робочих коліс (4) налаштовує відповідне гальмування щонайменше одного причепа для уникнення втрати поздовжньої стійкості тягового зусилля. 8. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що у пам'яті даних (10) керувального пристрою (5) зберігаються дані номінального значення потужності привідного агрегату (2) і, базуючись на отриманих даних про навантаження від обертального моменту, отримуються дані про актуальну ефективну потужність привідного агрегату (2), які порівнюються із номінальними значеннями, при цьому керувальний пристрій (5) надає команду оператору стосовно будь-якого відхилення та/або зберігає отримані дані про відхилення. 9. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що у пам'яті даних (10) керувального пристрою (5) зберігається номінальне значення розподілу навантаження від обертального моменту на окремих привідних валах (3а-k) керувальний пристрій (5) на основі отриманих даних про навантаження від обертального моменту здійснює змінення конфігурації приводу, зокрема, за допомогою налаштування робочого гальма, керованої трансмісії, таким чином, щоб номінальне значення розподілу навантаження від обертального моменту могло б бути задане оператором. 10. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що керувальний пристрій (5) у гальмівному режимі базуючись на отриманих даних змінює конфігурацію приводу таким чином, що привідні вали (3е, f, і, j) робочих коліс (4) не мають навантаження від обертального моменту або мають гальмівне навантаження від обертального моменту. 11. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що передбачено щонайменше один механізм блокування диференціала (3d, 3h), який налаштовується за допомогою керувального пристрою (5), при цьому керувальний пристрій (5) здійснює блокування та/або розблокування механізму блокування диференціала (3d, 3h) виключно у такому стані, у якому отримані дані про навантаження від обертального моменту на обох підпорядкованих механізму блокування диференціала частинах силового агрегату допускають це, зокрема у такому стані, коли отримані дані про навантаження від обертального моменту на обох підпорядкованих механізму блокування диференціала частинах силового агрегату в основному є ідентичними. 12. Сільськогосподарська робоча система за будь-яким з попередніх пунктів, яка відрізняється тим, що керувальний пристрій (5) виконує функцію обчислення тривалості роботи для силового агрегату (3) та/або для окремих компонентів трансмісії (3а-k) та поряд із тривалістю роботи зберігаються також отримані дані про навантаження від обертального моменту, переважно, швидкість обчислення тривалості роботи задається керувальним пристроєм (5) залежно від навантаження. 13. Керувальний пристрій для сільськогосподарської робочої системи із самохідною сільськогосподарською робочою машиною (1а), причому робоча машина (1а) оснащена щонайменше одним начіпним знаряддям (1b), зокрема ґрунтообробним знаряддям, таким як: плуг, культиватор або борона, причому передбачений привідний агрегат (2) робочої машини (1а), який впливає на робочі колеса (4) за допомогою силового агрегату (3) та підпорядкований керувальному пристроєві (5) блок керування та індикації (6), який відрізняється тим, що керувальний пристрій (5) виконаний з можливістю визначати навантаження від обертального моменту, які виникають під час роботи, щонайменше одного компонента трансмісії (3а-k) для привідних валів (3е, f, і, j) робочих коліс (4), причому під час роботи робочої машини (1а) через конфігурацію приводу впливають на навантаження від обертального моменту у силовому 8 UA 112073 C2 5 10 агрегаті (3), при цьому керувальний пристрій (5) на основі отриманих даних про навантаження від обертального моменту, під час роботи, оцінює конфігурацію приводу в залежності від конкретних цілей, таких як: мала ймовірність руйнування, номінальний термін служби та високу потужність та надає команду оператору здійснити оцінку відносно щонайменше однієї цілі, і здійснює оптимізацію приводу, також керувальний пристрій (5) із визначеного навантаження від обертального моменту визначає фактичний діапазон навантажень для силового агрегату (3), причому у пам'яті даних (10) керувального пристрою (5) частково протягом тривалого часу зберігається фактичний діапазон навантажень, зокрема при перевищенні розрахункового діапазону навантажень фактичним діапазоном навантажень, а при перевищенні розрахункового діапазону навантажень фактичним діапазоном навантажень, керувальний пристрій (5) дозволяє роботу тільки після підтвердження оператором. 9 UA 112073 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Автори російськоюSeelke Carsten, Ellermann Klaus
МПК / Мітки
МПК: G01L 3/04, A01B 63/112, A01B 67/00
Мітки: робоча, система, сільськогосподарська
Код посилання
<a href="https://ua.patents.su/12-112073-silskogospodarska-robocha-sistema.html" target="_blank" rel="follow" title="База патентів України">Сільськогосподарська робоча система</a>
Сільськогосподарська робоча машина, спосіб розподілу потоку маси, що вивантажується із сільськогосподарської збиральної машини, та сільськогосподарська робоча машина для здійснення способу
Номер патенту: 75575
Опубліковано: 15.05.2006
Автори: Кюн Бодо, Хайд'янн Франц
МПК: A01D 33/10
Мітки: маси, збиральної, сільськогосподарська, спосіб, потоку, способу, машини, вивантажується, розподілу, робоча, здійснення, сільськогосподарсько, машина
Формула / Реферат:
1. Сільськогосподарська робоча машина щонайменше з одним робочим органом для обробки збираної маси і приєднаним до цього робочого органа першим транспортуючим збирану масу пристроєм, а також щонайменше ще з одним додатковим транспортуючим збирану масу пристроєм, причому щонайменше два транспортуючих збирану масу пристрої розташовані таким чином, що утворюють між собою прохідний для збираної маси проміжок і забезпечують протилежні один одному...
Сільськогосподарська робоча машина
Номер патенту: 96135
Опубліковано: 10.10.2011
Автори: Екехард Йеппе, Рейнхард Лайнг
МПК: A01D 41/12, A01D 41/08, G01D 7/00, G01D 3/00, A01B 69/00, A01B 63/00
Мітки: робоча, сільськогосподарська, машина
Формула / Реферат:
1. Сільськогосподарська робоча або збиральна машина з щонайменше одним робочим агрегатом та кабіною водія, у якій на електронному базовому індикаторному полі, зображеному як мінімум в одному індикаторному блоці, візуально відображається множина закладених у різних функціональних віконцях параметрів машини і/або збираного врожаю і при цьому активізація та настройка базового індикаторного поля здійснюється за допомогою пристрою...
Самохідна сільськогосподарська робоча машина
Номер патенту: 99255
Опубліковано: 10.08.2012
Автори: Бусманн Крістоф, Еггенхаус Георг, Вількен Андреас, Баумгартен Йоахім
МПК: A01D 41/00
Мітки: машина, робоча, самохідна, сільськогосподарська
Формула / Реферат:
1. Самохідна сільськогосподарська робоча машина (2), яка містить робочі органи з регульованими робочими параметрами, і яка пересувається зі швидкістю ходу, причому швидкість ходу автоматично регулюється в залежності від щонайменше одного параметра збираного врожаю і/або одного робочого параметра робочої машини (2) за допомогою регулятора руху (21), та з, як мінімум, одним керуючо-, обслуговуючо-індикаторним блоком (22, 47), за допомогою...
Конструкція і спосіб встановлення керованого моста у транспортне положення та сільськогосподарська робоча машина, яка містить зазначений керований міст
Номер патенту: 101473
Опубліковано: 10.04.2013
Автори: Берк Даніель Дж., Макін Райан П., Коуерс Брюс А.
МПК: B62D 7/00, A01B 73/00, B60B 35/00, A01B 69/00, B62D 9/00
Мітки: зазначений, машина, яка, керованого, моста, сільськогосподарська, транспортне, спосіб, містить, встановлення, конструкція, положення, міст, робоча, керований
Формула / Реферат:
1. Сільськогосподарська робоча машина, яка містить шасі й вузол моста, з'єднаний із зазначеним шасі, причому зазначений вузол моста містить перший і другий вузли маточин коліс, передні й задні гідравлічні циліндри, з'єднані з кожним зазначеним першим і другим вузлами маточин коліс для встановлення положень під кутом зазначених першого й другого вузлів маточин коліс відносно зазначеного шасі, причому зазначені передні й задні гідравлічні...
Система для розкидування матеріалу у вітрових умовах та робоча машина, що містить вказану систему
Номер патенту: 100118
Опубліковано: 26.11.2012
Автори: Черверка Кірк Дж., Пірсон Марк Л.
МПК: A01D 41/127, A01D 41/12, A01C 17/00
Мітки: робоча, містить, машина, умовах, вітрових, матеріалу, розкидування, вказану, систему, система
Формула / Реферат:
1. Система для розкидування матеріалу з робочої машини у вітрових умовах, яка містить:розкидач, конструктивно виконаний для розкидування матеріалу; пристрій вводу, конструктивно виконаний для надання даних про вітрові умови, дані про вітрові умови включають напрямок вітру та швидкість вітру; контролер, з'єднаний із розкидачем та пристроєм вводу, причому контролер конструктивно виконаний для виконання програмних команд для керування...
Попередній патент: Спосіб одержання стабільної харчової емульсії масло-у-воді, що не містить харчових добавок
Наступний патент: Пристрій для розділення магнітних частинок на фракції
Випадковий патент: Спосіб підвищення сейсмостійкості будівель та споруд