Спосіб керування гравітацією і польотом магнітоплана у просторі

Формула / Реферат
Спосіб керування гравітацією і польотом магнітоплана у просторі, що здійснюють за допомогою надпровідного магнітного двигуна Маг-8, який встановлюють у центрі його круглого корпусу, з кабіною екіпажу зверху і атомною силовою установкою у машинному відділенні внизу, яка виробляє і постачає електричну енергію у вказаний магнітний двигун, який своїми круглими надпровідними контурами, обертовими в протилежних напрямках, під впливом дії надпотужних магнітних потоків контурних соленоїдів циліндричної форми створює надсильне електричне поле, генеруюче потоки гравітаційних хвиль, які знижують щільність силових ліній зовнішнього гравітаційного поля навколо апарата і відштовхують їх в бік від всієї довжини дуги його круглого корпусу, крім того, при обертанні контурів виникає гіроскопічний момент, який постійно утримує магнітоплан у горизонтальному положенні і не дозволяє йому завалитись в будь-яку сторону, і одночасно надпровідні несучі соленоїди конусної форми, які закріпленні рівномірно під його нижньою площиною, збуджуються і створюють довгі надсильні потоки магнітної індукції, генеруючі також потоки гравітаційних хвиль, які відштовхують силові лінії зовнішнього гравітаційного поля з-під низу апарата за край його круглого борту, де вони попадають під відштовхуючу дію потоків гравітаційних хвиль обертових контурів, і ці антигравітаційні сили, створені двигуном навколо магнітоплана, роблять його невагомим, а також, цією силою і її впливом на зовнішнє гравітаційне поле навколо магнітоплана, і відповідно, і на вагу його маси, можна керувати, - регулюючи величину напруженості (збільшуючи чи зменшуючи її) надсильного електричного поля працюючих контурів і швидкості їх обертання, яке автоматично, синхронно приводить до генерування ним більш сильного (більш щільного), або меншого по силі (менш щільного) потоків гравітаційних хвиль, тобто антигравітації, які (яка) автоматично, синхронно впливають (впливає) на щільність силових ліній зовнішнього гравітаційного поля навколо магнітоплана і на віддалення їх на більшу чи меншу відстань від нього, і одночасно магнітні потоки несучих соленоїдів, взаємодіючи з магнітним полем Землі, створюють позитивну підйомну силу, яка діє на його корпус, він відривається від поверхні і летить, а керування ним в польоті відбувається несучими соленоїдами, тобто, в яку сторону від його лінії курсу, відповідно до схеми польотів, будуть відхилені магнітні потоки несучих соленоїдів, в протилежну сторону він і полетить, а енергія від атомної силової установки дозволяє підтримувати на борту апарата порядок і умови виконання відповідних дій у часі, при його активному польоті, від зльоту і до посадки.
Текст
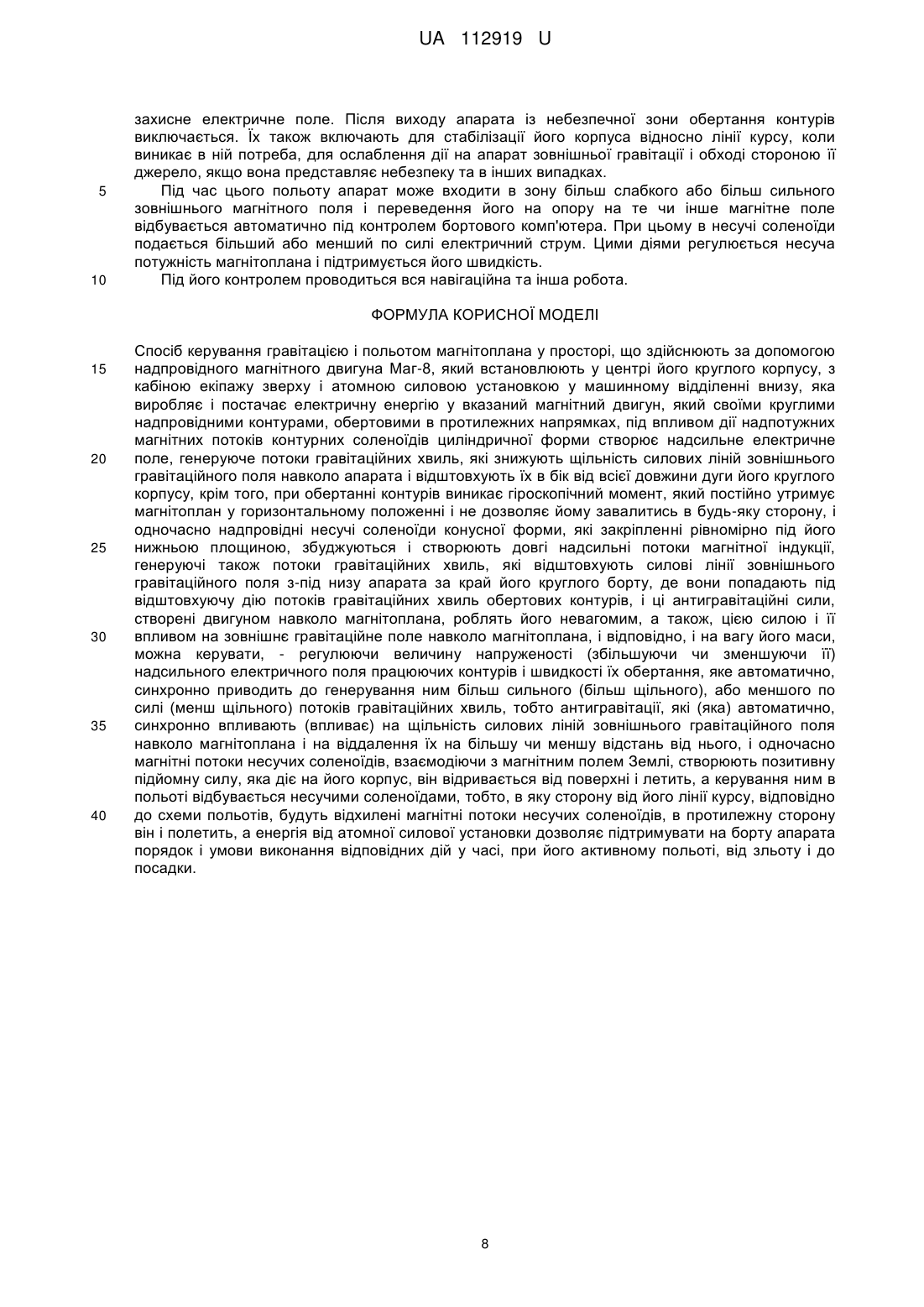
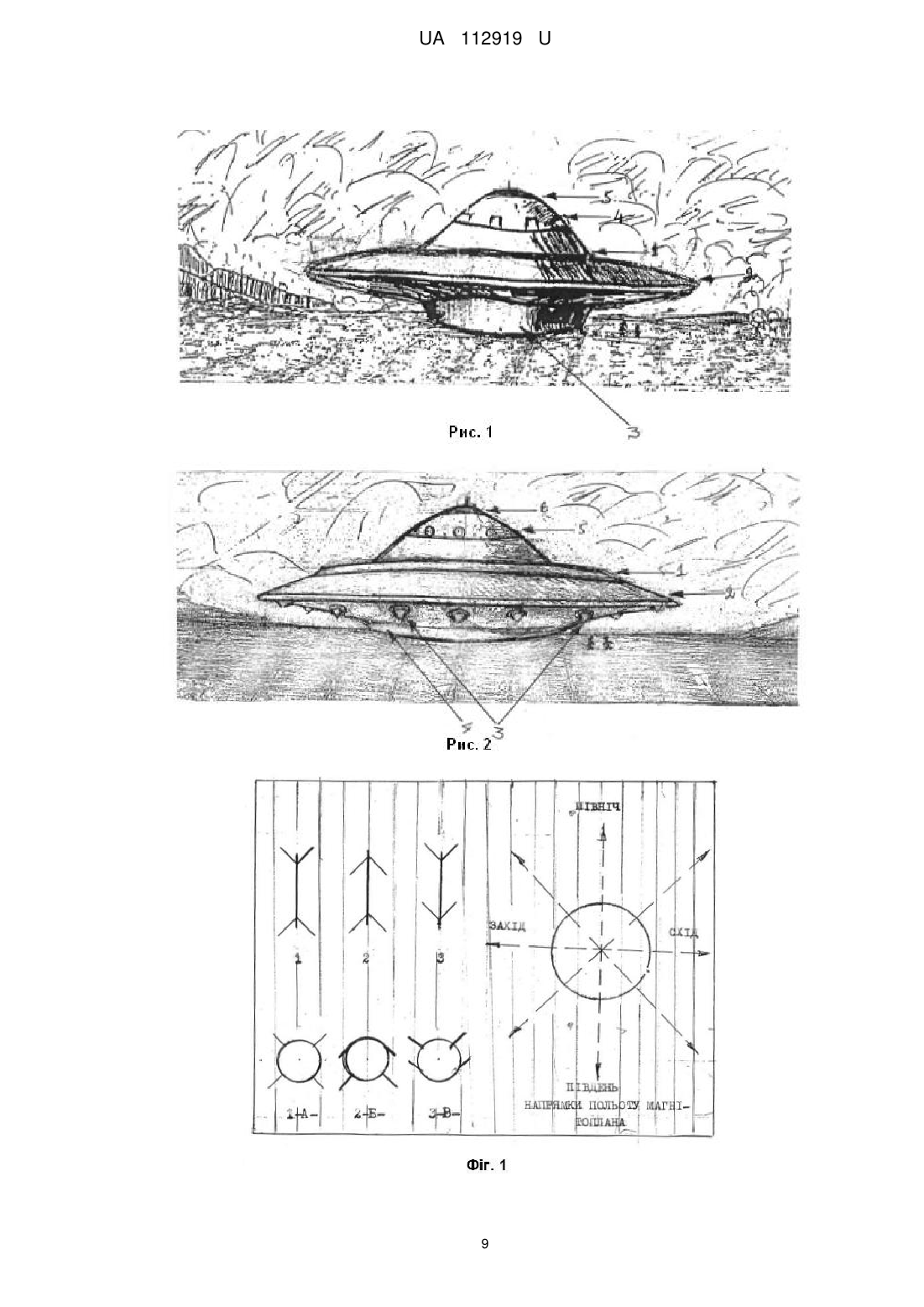
Реферат: UA 112919 U UA 112919 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до аерокосмічної галузі та може бути використана для способу керування гравітацією і польотом магнітоплана у просторі. Даний спосіб, тобто керування літальним апаратом у просторі, здійснюють за допомогою надпровідного магнітного двигуна та використання сил, описаних у законі Кулона. Керування впливом зовнішньої гравітації на корпус апарата здійснюють способом регулювання сили антигравітації, яку створює працюючий надпровідний магнітний двигун. Літальні апарати, оснащенні такими двигунами, можна використати для захисту Землі від загрози зіткнення її з космічними глибами - астероїдами і кометами, а також для здійснення експедицій до інших зірок для пошуку планет, придатних для життя людей. Відомі аналоги (Патенти: № 63739 від. 25.10.2011 р., № 64388 від 10.11.2011 p., стаття "Магнітоплан - космічний корабель майбутнього", яка була надрукована в газеті "Голос України" від 2.12.2006 р., в "Екологічній газеті" від 23.10 і 13.11 2007 p., в журналах - "АОН - авиация общего назначения" № 3, 2008 p., "Винахідник і Раціоналізатор" № 1, 2010 p., "Время" № 10, 2009 p., і в Інтернеті на сайті журнала www.ytime.ua, в статті: "Магнитоплан - космический корабль с магнитными двигателями" - журнал "Винахідник і Раціоналізатор - Наука і Техніка" № 4, 2014 р. Названі статті розміщенні і на сайті Космічного агентства України www.space.com.ua). Магнітоплани по конструкції можуть мати різну форму. Кількість надпровідних магнітних двигунів на борту апарата залежить від його розмірів. Головним джерелом електричної енергії являється - атомна силова установка. Їх може бути декілька. Це також залежить від розмірів магнітоплана і встановленого на його борту обладнання. Час перебування його в космосі при активному польоті залежить від кількості палива в реакторі (реакторах) і на складі апарата, а також від запасу продовольства і фізичного стану екіпажу. Літальний апарат магнітоплан з надпровідним (тобто, квантовим) магнітним двигуном і атомною силовою установкою, та спосіб керування ним при польоті у просторі - це значно вищий, більш високотехнологічний рівень техніки, ніж її найближчий аналог - сучасна космічна ракета з її хімічним паливом і реактивною тягою. У неї після старту, при активному польоті, сотні тонн палива витрачаються за декілька хвилин і далі вона продовжує політ в інерційному русі. Тоді як у магнітоплані, як уже вище говорилося, паливо в реакторі (реакторах) і на його складі дозволяє йому знаходитись у космосі, при активному польоті від зльоту і до посадки. Техніка побудована на принципі квантової механіки - це майбутнє людства. А ракетна техніка з її реактивною тягою ще відслужить йому деякий час як парова машина, залишиться в історії. В основу корисної моделі поставлена задача розробки способу керування гравітації і польоту магнітоплана у просторі. Поставлена задача вирішується за допомогою використання магнітоплана, оснащеного надпровідним магнітним двигуном і потужним джерелом електричної енергії. Досягнення технічного результату при її здійсненні вирішується за допомогою використання сил описаних в Законі Кулона. Ці сили можуть привести її в рух, а також можна використати їх, як спосіб керування у просторі. Для цього пропоную до розгляду невеликий магнітоплан круглої форми (див. фіг. 1). Така форма його конструкції дає можливість легко ним управляти і створювати внутрішню гравітацію у випадку довгого перебування екіпажу в космосі. Пропонований магнітоплан комплектується магнітними двигунами конструкції: МАГ-3, МАГ-4, МАГ-5, МАГ-6, МАГ-7, МАГ-8, МАГ-8а. Всі вони працюють однаково і відрізняються один від одного тільки складністю і потужністю. Корпус складається з трьох частин - верхньої, середньої і нижньої (пп. 4, 1, 2, 3). У верхній частині магнітоплана знаходиться пульт керування (кабіна екіпажу п. 4). Він захищений від магнітних випромінювань спеціальним екраном. В середній його частині (п. 2) знаходиться магнітний двигун. Ця частина круглого корпусу апарата - найбільша. Її розмір залежить від діаметра обертових надпровідних кілець - контурів (подальшому - контури), яка повинна бути трохи більша за них. В нижній частині апарата знаходиться відсік, в якому розміщено блок живлення - атомна силова установка. Під пунктом 5 показано антену радіолокатора. А тепер розглянемо цей магнітоплан з одним магнітним двигуном з вказаної комплектації, наприклад, МАГ-8, його стислий опис і дії, по підготовці апарата до зльоту (МАГ-8 ПУ № 67234 від 10.02.2012 р.). В цьому двигуні, як і в інших двигунах вказаної комплектації, кількість надпровідних несучих соленоїдів може бути - 4, 6, 8, 10, 12 і більше. Їх кількість в двигуні завжди повинна бути парною. Але ми розглянемо політ магнітоплана з вказаним магнітним двигуном у якого встановлено чотири надпровідних несучих соленоїдів. 1 UA 112919 U 5 10 15 20 25 30 35 40 45 50 55 60 МАГ-8 складається з двох пар надпровідних контурів, з надпровідних контурних соленоїдів циліндричної форми з магніто-підсилюючими стержнями, які закріпленні під ним рівномірно, нерухомо і в перпендикулярній площині до кожного із зазначених контурів. Обидві пари контурів закріплені на валу головного електродвигуна з можливістю обертання їх в протилежних напрямках. Головний електродвигун знаходиться у верхній частині магнітного двигуна (його також можна розмістити і в нижній частині двигуна). А резервний електродвигун розташований всередині його корпуса. Обидва вказані електродвигуни з'єднані між собою одним валом. А надпровідні несучі соленоїди знаходяться знизу по краю великої дуги корпуса магнітного двигуна. Вони конусної форми з магніто-підсилюючими стержнями і закріплені рухомо на однаковій відстані один від одного. Після установки магнітного двигуна в центрі магнітоплана його вісь і вісь контурів повинні бути на одній прямій лінії. Потім він з'єднується електрично з блоком живлення і керування. Далі проводиться перевірка роботи бортових систем, забезпечуючих його безпечний політ. Після цього він займає на місцевості або бетонній площадці вихідну позицію і його несучі соленоїди переводяться в злітне положення. Так, як цей магнітоплан має круглу форму корпуса, то він може злітати будь-якою стороною відносно напрямку магнітного меридіана (тобто, до напрямку магнітного поля Землі). Ці напрямки ідуть через кожні 45 градусів великої дуги земної поверхні. Початок відліку з півночі, з нуля градусів, тобто, як це показано на шкалі компаса. Див. схему "Напрямки польоту магнітоплана" на фіг. 1. З пульта керування апаратом умовно проводимо лінію (північ - південь), так, щоб вона проходила через центр магнітоплана, тобто поділила його на дві частини. Назву цю лінію діаметральною. Вона повинна знаходитись на одній прямій з напрямком магнітного поля Землі. А несучі соленоїди, які знаходяться на північній стороні цієї лінії - названі передніми, а на протилежній її стороні - задніми (або кормовими). Потім два його передні несучі соленоїди від вертикалі подаємо одноразово на 45 градусів вперед (тобто на північ) і відхиляємо їх знову на 45 градусів в різні сторони, тобто, один - вправо, другий - вліво. Після цього, таку роботу проводимо і з задніми несучими соленоїдами. Тобто, подаємо їх одноразово від вертикалі на 45 градусів назад (на південь) і потім відхиляємо їх під тими же кутами па 45 градусів в різні сторони, тобто, один - вправо, другий - вліво. Таким чином, несучі соленоїди магнітоплана передні і задні стали напрямками в різні сторони відносно до його діаметральної лінії, або до напрямку магнітного поля Землі. Див. фіг. 1, п. 1 в схемі "Кути відхилення соленоїдів під нижньою площиною магнітоплана при різних напрямках його польоту". Це значить, що магнітоплан зайняв стартове положення. (Примітка: вище вказані кути відхилення соленоїдів на 45 градусів - це головні (базові) кути. Ці кути при необхідності можна збільшувати або зменшувати у вказані сторони на відповідну кількість градусів). Як відомо, що силові лінії магнітного поля Землі виходять з Північного магнітного полюса і входять в Південний магнітний полюс. При цьому, вони ідуть знизу Землі і обтікають паралельно її поверхню, і так піднімаються далеко в космос, тобто ці магнітні силові лінії будуть обтікати несучі соленоїди знизу і до їх верху. Як відомо, що магнітне поле соленоїдів збуджене електричним струмом, який протікає в його обмотці, подібне магнітному полю постійного магніту. Тобто, кінець соленоїда, з якого виходять магнітні лінії, є його північним полюсом, а протилежний кінець - південним. А напрямок магнітного поля залежить від напрямку електричного струму в соленоїді. Тому, в несучі соленоїди - передні і задні електричний струм треба подавати так, щоб в передніх соленоїдах двигуна магнітне поле збуджувалося північної полярності, а в задніх соленоїдах - південної полярності. А тіла з магнітними полями однієї полярності, як відомо, відштовхуються, а різної полярності - притягуються. У нашому прикладі відштовхування буде попереду і позаду апарата, тобто, результуюча сила направлена уверх. По другому можна сказати так, що після подачі електричного струму в несучі соленоїди в них збуджуються надсильне (над могутнє) магнітне поле, яке взаємодіє з магнітним полем Землі і при цьому виникає позитивна підйомна сила, яка діє на його корпус і він відривається від поверхні і летить. Зліт магнітоплана Після закінчення підготовки апарата до зльоту в надпровідний магнітний двигун подається електричний струм. Приводяться в обертовий рух в протилежних напрямках, надпровідні контури. В них під дією надпровідних контурних соленоїдів виникає електричний струм великої сили і відповідно електричне поле високої напруженості. Доводимо швидкість обертових контурів і напруженість їх надсильного електричного поля до відповідного рівня, що 2 UA 112919 U 5 10 15 20 25 30 35 40 45 50 55 60 автоматично (синхронно) веде до генерування ним відповідної сили (напруженості) гравітаційних хвиль. Вони щільними потоками почнуть виходити в навколишній простір з сторони всієї довжини дуги його круглого корпусу. Ці гравітаційні хвилі, генеровані надсильним обертовим електричним полем, як могутній вихор, відштовхне в сторону від корпусу апарата повністю або частково, силові лінії зовнішнього гравітаційного поля, що автоматично вплине на його багатотонну масу. Він стане повністю невагомим або значно легшим. Це залежить від режиму роботи двигуна. Одночасно з цим, в надпровідних несучих соленоїдах збуджується надсильне магнітне поле. З них почнуть виходити довгі магнітні потоки великої сили. Це надсильне магнітне поле також генерує потоки гравітаційних хвиль. Їх напрямок співпадає з напрямком цього поля. Вони відштовхнуть силові лінії зовнішнього гравітаційного поля з-під низу апарата за край його круглого борту, де вони попадають під відштовхуючу дію потоків гравітаційних хвиль обертових контурів. Ці антигравітаційні сили, створені двигуном навколо магнітоплана, роблять його невагомим повністю або частково. Як уже говорилось, це залежить від режиму його роботи. Так, при зміні режиму роботи двигуна змінюється і величина напруженості, в більшу чи меншу сторону, надсильного електричного поля працюючих контурів і швидкість їх обертання. А це, як уже говорилося, автоматично, синхронно, приводить до генерування ним більш сильного (більш щільного), або меншого по силі (менш щільного) потоків гравітаційних хвиль, тобто, антигравітації, які (яка) автоматично синхронно впливають (впливає) на щільність силових ліній зовнішнього гравітаційного поля навколо магнітоплана і на віддалення їх на більшу чи меншу відстань від нього. Таким чином, силою антигравітації, яку створює магнітний двигун і її впливом на зовнішню гравітацію навколо апарата, і відповідно і на його масу можна керувати. Наукою доведено, що антигравітація існує і вона має протилежне направлення по відношенню до гравітації. І що її відштовхуюча сила настільки велика, що може підіймати багатотонні конструкції. Але майже немає успішних експериментів (крім багато численних випадків левітації), які дали б людству можливість вільно керувати вагою об'єктів. Але надпровідному магнітному двигуну під силу це зробити. Він може вільно керувати, як своєю вагою, так і тим об'єктом, в якому він встановлений, наприклад, у магнітоплані. Після закінчення доведення потужності працюючого магнітного двигуна до режиму роботи "до зльоту готовий", в ньому збільшують електричний струм. Відповідно буде рости і величина його надсильних електричного і магнітного полів, що автоматично збільшують і позитивну підйомну силу. Вона діє на корпус апарата, від відривається від поверхні і летить. Після відриву апарата від поверхні, приблизні на 1-5 метрів зліт можна затримати на декілька секунд, щоб обертові контури, як гіроскоп стабілізували його корпус у вертикальному положенні, тобто, придали йому у просторі стійке вертикальне положення. Потім зліт можна продовжити. Він може бути повільним і стрімким. Це залежить від сили електричного струму, що подається в несучі соленоїди. Так як, магнітне поле Землі дуже слабке, то магнітні потоки несучих соленоїдів магнітоплана повинні бути певної довжини, нагадуючи полихаючий струмінь газозварювального апарата, коли він ще не скорочений для роботи. Довгі, могутні потоки несучих соленоїдів потрібні для того, щоб якомога більше силових ліній магнітного поля Землі задіяти для взаємодії з ними для створення достатньої позитивної підйомної сили, яка б вільно підняла його в небо. При звичайних електричних і магнітних полях такий зліт неможливий. Таким чином в цьому розділі детально розкрита технічна задача, на вирішення якої направлена корисна модель, і показано технічний результат, який отримано при її здійсненні. Перша частина цієї задачі виконана і технічний результат досягнуто, тобто поетапно і детально розкритий спосіб, за допомогою якого корисна модель може злетіти і летіти у просторі. Друга частина цієї задачі - розкрити можливість подальшого одержання технічного результату при здійсненні корисної моделі. А цього можна досягти, розкривши детально спосіб керування магнітопланом у просторі. Після розгону апарата і набору достатньої висоти його можна легко перевести в горизонтальний політ. Кермом на ньому служать самі несучі соленоїди. Ними регулюються його швидкість, - збільшуючи чи зменшуючи в них електричний струм. При переводі магнітоплана в горизонтальний політ, наприклад, на північ, його несучі соленоїди знеструмлюються (або в них зменшується електричний струм) і передні, під тими же кутами низом на 90 градусів подаються назад. Тепер передні і задні соленоїди будуть знаходитись в одному напрямку і під однаковими кутами відповідно нижньої площини магнітоплана. 3 UA 112919 U 5 10 15 20 25 30 35 40 45 50 55 Див. фіг. 1, п. 2 на схемі "Кути відхилення соленоїдів під нижньою площиною магнітоплана…" (або скорочено "Схема польоту магнітоплана") В них знову подається електричний струм певної сили, але вже однієї направленості, тобто так, щоб магнітне поле у передніх і задніх соленоїдах було південної полярності (одного напрямку). При такому положенні соленоїдів позитивна сила, що виникає при взаємодії магнітних полів апарата і Землі буде діяти з півдня на північ, і він полетить на північ. При цьому, висота його польоту по горизонту підтримується відповідним кутом обох пар соленоїдів відносно нижньої площини магнітоплана, тобто, цей кут зменшуємо або збільшуємо в межах 450 градусів, тобто, рухаючи несучі соленоїди від 45 градусів в сторону нижньої площини апарата, - наближаючи або віддаляючи їх від паралельності з нею. Маневр по переводу апарата з вертикального польоту на горизонтальний, на північ, можна виконати і із знеструмленням тільки одних передніх соленоїдів, і переводом їх кута нахилу назад на південь, тобто так, як вище говорилось. В польоті всі операції, зв'язані з виключенням і включенням соленоїдів, виконуються миттєво, але з поступовим збільшенням в них електричного струму. Тепер курс апарата змінимо на північний захід, тобто, повернемо на 45 градусів вліво. Для цього треба плавно повернути працюючі передні соленоїди на декілька градусів вправо і апарат почне повертати в ліву сторону, і при виході його на курс 315 градусів, тобто, на північний захід, передні соленоїди переводяться в своє попереднє положення. Ця операція виконується при працюючих соленоїдах обох пар. Див. фіг. 1, п. 2 на схемі "Кути відхилення соленоїдів…" (тобто, соленоїди в апараті займуть таке положення, як при польоті на північ). При вазі магнітоплана, значно легшій від дійсної, і при його повній невагомості поворот на курс 270 градусів, а також і при інших маневрах можна виконувати різними способами. Так, при вазі апарата, значно легшої від дійсної, поворот на захід, тобто, на курс 270 градусів треба погасити його швидкість плавним переводом знеструмлених соленоїдів (або з пониженим в них електричним струмом) під тими же кутами на 90 градусів вперед, так, щоб вони своїми кінцями були направлені на зустріч руху магнітоплана. Коли соленоїди займуть це положення їх включають на відповідну потужність і сили, що виникнуть при взаємодії магнітних полів апарата і Землі, будуть направлені назустріч руху апарата, і це приведе до його гальмування. При виконанні цього маневру соленоїди будуть стояти в положенні, як це показує Фіг. 1, п. 3 в схемі "Кути відхилення соленоїдів…". Коли швидкість апарата значно зменшиться всі соленоїди знеструмлюють і задні під тими ж кутами низом переводяться 90 градусів назад. А передні знаходяться у тому ж положенні. Обидві групи соленоїдів займуть положення як при зльоті. Фіг. 1, п. 1, в схемі "Кути відхилення соленоїдів…". Потім передні і задні соленоїди одноразово низом, під тими ж кутами переводимо на 90 градусів вправо, тобто, в бік правого борту, як це показує фіг. 2, п. 5 і п. 5-д- у схемі "Кути відхилення соленоїдів…". При цьому, апарат по інерції ще продовжує летіти з пониженою швидкістю в попередньому напрямку. В соленоїди знову подають електричний струм і його поступово збільшують. При цьому магнітне поле в них буде наростати і сили, що виникнуть при взаємодії магнітних полів апарата і Землі, почнуть направляти його на відповідний курс. Магнітоплан, про який йдеться мова, має форму кола, тому поняття "перед - корма" приймається умовно. Він може летіти вперед будь-якою стороною і при поворотах йому необов'язково повертати корпус навколо своєї осі. При повній невагомості магнітоплана, тобто, при нульовій вазі його маси, він має і нульову інерційну швидкість. Тому при переводі соленоїдів в бік правого борту, як це показує фіг. 2, п. 5 і п. 5-д- у схемі польоту магнітоплана і подачі в них електричного струму він без зниження швидкості миттєво поверне на заданий курс. При нульовій вазі апарата, він також може виконувати миттєві повороти і під кутом 90 градусів вправу і в ліву сторону від лінії курсі. А також і від точки зависання, він може миттєво набрати велику швидкість без руйнівного впливу її на нього і екіпаж. Тепер розглянемо зліт і політ магнітоплана по напрямку Схід - Захід, тобто, під кутом 90 градусів до напрямку магнітного поля Землі. На перший погляд це неможливо. А якщо подумати, то тут нічого неможливого і немає. Наприклад, виконаємо зліт апарата на Схід. При цьому, його діаметральну лінію "перед корма" ставимо по компасу на лінію Схід - Захід, тобто, під кутом 90 градусів до напрямку магнітного поля Землі. Потім його несучі соленоїди лівого і правого бортів відхиляємо від 4 UA 112919 U 5 10 15 20 25 30 35 40 45 50 55 вертикалі в сторони до 45 градусів і передні під тим же кутом подаємо на 45 градусів вперед (на Схід), а задні - під тим же кутом - назад (на Захід). Таким чином соленоїди правого борту апарата стали направленими: передній на південний схід, задній на південний захід. Лівого борту: передній на північний схід, задній на північний захід. Це означає, що магнітоплан зайняв стартове положення див. фіг. 2, п. 4 і п. 4-г- у схемі "Кути відхилення соленоїдів…". Як уже говорилось, що магнітні силові лінії магнітного поля Землі виходять з Північного магнітного полюса Землі і входять в Південний магнітний полюс. При цьому вони ідуть знизу Землі і паралельно обтікають її поверхню, і так піймаються далеко в космос. Тобто, ці магнітні силові лінії будуть обтікати (або пронизувати) несучі соленоїди знизу і до їх верху. Після заняття магнітопланом стартового положення в його несучі соленоїди лівого і правого бортів (або лівої і правої сторони) подаємо електричний струм різного напрямку, тобто так, щоб у соленоїдах лівого борту збуджувалося надмогутнє магнітне поле північної полярності, а соленоїдах правого борту надмогутнє магнітне поле південної полярності. Тому, при взаємодії магнітних полів апарата і Землі виникає позитивна підйомна сила, яка діє на корпус з обох його бортів і з однаковою силою, і він відривається від поверхні і летить вертикально уверх. Після розгону і набору достатньої висоти, його як і в першому прикладі можна легко перевести в горизонтальний політ, наприклад на Схід. При цьому, всі несучі соленоїди знеструмлюють і передні під тим же кутом повертають (низом) на 90 градусів назад. Тепер передні і задні соленоїди будуть знаходитись в одному напрямку і під однаковими кутами по відношенню до нижньої площини апарата. Після цього в них знову подається електричний струм різного напрямку, так щоб з лівого борту магнітне поле було північної полярності, а з правого - південної полярності. Див. фіг. 2, п. 6 і п. 6-е- у схемі "Кути відхилення соленоїдів…". Як уже говорилося всі ці операції в польоті виконуються миттєво, але з поступовим збільшенням електричного струму соленоїда. Якщо магнітоплан треба повернути, наприклад на захід, соленоїди знову знеструмлюють і під своїми кутами повертають на 90 градусів на схід, тобто, в сторону польоту. При цьому апарат продовжує по інерції летіти на схід. В соленоїди знову подають електричний струм того ж напрямку і його поступово збільшують. При цьому, магнітне поле соленоїдів наростає і сили, що виникають при взаємодії магнітних полів апарата і Землі направлені назустріч руху магнітоплана, приведуть до його гальмування. Після закінчення гальмування, електричний струм в соленоїдах збільшують і він полетить в зворотному напрямку див. фіг. 2, п. 5 і п. 5-д- у схемі "Кути відхилення соленоїдів…". На магнітоплані після старту можна летіти прямо по тих напрямках, що показані в схемі "Напрямки польоту магнітоплана". Але він може летіти і по інших напрямках, і долетіти до будь-якої точки земної поверхні, тільки не прямо як літак, а по вище вказаній схемі. Але враховуючи, що швидкість магнітоплана набагато більша за швидкість будь-якого літака він прилетить куди завгодно - швидше літака. Магнітоплан може також здійснювати політ вздовж напрямку магнітного поляЗемлі, відхиливши несучі соленоїди тільки один раз на 45 градусів у відповідні сторони (на Північ і Південь), тобто, без додаткового відхилення їх на 45 градусів в сторони, відносно його нижньої площини. При цьому він може, як і в першому прикладі, вертикально злетіти і піднятися в космос, а потім перевести його у орбітальний рух, і на великій швидкості облетіти Землю вздовж напрямку її магнітного поля. Погасивши швидкість, він може зависнути в космосі, над точкою зльоту і під дією своєї ваги приземлитися, регулюючи швидкість приземлення силою електричного струму в несучих соленоїдах. протягом всього польоту обертові контури, як гіроскоп будуть постійно утримувати апарат в горизонтальному положенні. При цьому орбітальному польоті рух магнітоплана можна перевести в іншу сторону змінивши положення несучих соленоїдів під його нижньою площиною, відповідно до вище вказаної схеми польотів. протягом всього польоту надпровідні контури постійно обертаються в могутньому магнітному полі контурних соленоїдів і перетинають його магнітні лінії в перпендикулярній площині. При цьому в них виникає електрорушійна сила (ЕРС), тобто ці обертові контури працюють як генератор електричного струму, електроенергія від якого може надходити в бортову електромережу. Але головним завданням обертових контурів є не поповнення бортової електроенергії (це їх допоміжна функція), а в створенні разом з контурними і несучими соленоїдами дуже сильних електричного і магнітного полів, які, на мій погляд, здатні послабити дію гравітаційного поля Землі на апарат, що зробить його дуже легким або невагомим. 5 UA 112919 U 5 10 15 20 25 30 35 40 45 50 55 Другим важливим завданням обертових контурів - це як гіроскоп постійно утримувати магнітоплан в польоті в горизонтальному положенні, при польоті по прямій і виконанні різноманітних маневрів. Так, при виконанні маневрів на різних швидкостях, вись його корпусу може відхилятися в ту чи іншу сторону. А гіроскопічний момент, виникаючий при обертанні контурів, постійно повертає його вісь у вертикальне, а корпус у горизонтальне положення, тобто, не дозволяє апарату завалитись у будь-яку сторону. І до того ж виключено, щоб робота контурів могла привести до вільного обертання корпусу навколо своєї вісі. Для виникнення гіроскопічного моменту контурам не потрібно мати такі величезні оберти навколо своєї осі, як це мають корабельні гіроскопи, тому що, їх діаметр набагато більший за діаметр якоря гіроскопа. Тому, для виникнення гіроскопічного моменту контурам треба мати значно меншу кількість обертів за хвилину. (Контури своїм обертанням навколо вісі нагадують дитячу іграшку "дзиґу", яку куди не штовхай, але вона буде завжди займати вертикальне положення, а велика дуга її корпусу - горизонтальне). У контурів є ще одна особливість, що при обертанні навколо своєї вісі виникає силове торсійне поле, яка додаватиме двигуну додаткової позитивної сили. Під час польоту магнітоплана від його корпусу буде відходити світіння різної інтенсивності. Воно визивається тим, що в обертових надпровідних контурах під дією надсильних магнітних потоків контурних соленоїдів виникає електричний струм великої сили і відповідно електричне поле високої напруженості, що приводить до іонізації атмосфери і виникнення плазми. Разом з процесом іонізації відбувається і збудження атомів атмосфери, коли вони переходять на більш високі енергетичні рівні, і при поверненні їх у нормальний стан, випромінюють світло (кванти світла). Цілком можливо, при таких умовах апарат може летіти як би в шари плазми і не відчувати на собі дію опору атмосфери, що може дозволити йому розвивати йому величезну швидкість і маневреність. А різна інтенсивність його світіння, яке відходить від корпусу апарата залежить від сили електричного струму, який подається в несучі вузли двигуна. А це, як уже говорилося, визиває збудження в них більш сильного чи меншого по силі електричного і магнітного полів і відповідно, і процесів - іонізації і квантування. Так як магнітоплан розрахований на використанні в його несучих вузлах високотемпературних надпровідних матеріалів, які поки не створенні, то здійснити вище вказані польоти можна і за допомогою існуючих надпровідників. При цьому треба прийняти до уваги, що в існуючих надпровідників надпровідність руйнується при напруженості магнітного поля(1-2) х 10 в п'ятому степені ерстед. Використовуючи магнітне поле нижче критичного рівня магнітоплан буде літати. Як уже вище говорилося, при звичайних електричних і магнітних полях такий політ неможливий. Те, що магнітоплан буде літати і в нього позитивне майбутнє підтверджується і "ефектом Мейснера". Він полягає в тому, якщо над магнітом помістити надпровідник, то він зависне у повітрі. А в просторі над ним створюється зона в якій значно зменшується вага розміщених в ній предметів, в тому числі і живих об'єктів. Це було наочно продемонстровано сенсаційним знімком в березні 1991 року в авторитетному науковому журналі "Нейчер", на якому показаний директор токійської Дослідної лабораторії надпровідності, сидячим на блюді із надпровідного керамічного матеріалу. Між ним і підлогою було чітко видно щілину. Маса директора разом з блюдом була 120 кг, що ніяк не заважало їм рухатись над землею. Це явище потім отримало назву "ефекта Мейснера". (стаття В. Малютін Левітація // "Созвездие сканвордов". - № 7. - 2008 р. - С. 26). В магнітоплані, як уже говорилося, в його корпусі знаходяться дві пари надпровідних контурів по діаметру майже рівних з діаметром його корпусу і між ними закріпленні надпровідні контурні соленоїди. А знизу апарата знаходяться надпровідні несучі соленоїди. В зону, що знаходиться над цими надпровідниками, яка зменшує вагу всіх предметів, входить корпус магнітоплана з всім його обладнанням і екіпажем. Тому, "ефект Мейснера" буде постійно допомагати працюючому надпровідному магнітному двигуну зменшувати вагу маси апарата від зльоту і до посадки. А витікаюча (вихідна) із його надпровідників енергія велетенської сили легко підніме облегшений апарат і він полетить туди, куди поведе його екіпаж (як уже говорилося, направляючи витікаючу із них енергію в ту чи іншу сторону, і він автоматично буде виконувати ці команди, тобто летіти у вказаному напрямку). Таким чином і друга частина цієї задачі виконана. Технічний результат, який можна досягти при здійсненні корисної моделі, детально розкривається описаним способом керування магнітопланом у просторі. 6 UA 112919 U 5 10 15 20 25 30 35 40 45 50 55 60 І на останок повторю, що пропонованим способом керування гравітацією і польотом магнітоплана у просторі, за допомогою надпровідного магнітного двигуна, можна досягти бажаного технічного результату, тільки при здійсненні корисної моделі. До переліку фігур креслення входять дві схеми польоту магнітоплана - фіг. 1 і фіг. 2 із заголовком "Кути відхилення соленоїдів під нижньою площиною магнітоплана при різних напрямках його польоту". На обох схемах, не зовсім чітко показані, паралельні лінії, які проходять на них зверху вниз. Це умовні силові лінії зовнішнього магнітного поля. На фіг. 1 показано три прямі лінії під номерами №№ 1, 2, 3. Від кінців кожної з них відходять по дві короткі лінії, які своїми кінцями направленні в різні сторони. Пряма лінія - це умовна діаметральна лінія, про яку говорилося в тексті. Вона проходить через центр апарата і знаходиться на цій схемі на одній прямій лінії з напрямком магнітного поля Землі, тобто на одній прямій з напрямком зовнішнього магнітного поля. А бокові короткі лінії на кінцях діаметральної лінії - це умовно показані соленоїди і їх напрямок відносно неї. Крім цього, під кожною умовною діаметральною лінією, які позначенні на фігурі 1 номерами №№ 1, 2, 3, а на фігурі 2 №№ 4, 5, 6 з умовно позначеними на них соленоїдами і під ними показані кола (круги), які позначенні №№ 1-А-, 2-Б-, 3-В- і 4-Г-, 5-Д-, 6-Е-. Ці кола (круги) умовно показують нижню площину магнітоплана з виступаючими під нею соленоїдами. Наприклад, на фігурі 1 на рисунках пунктів № 1 і № 1-А схематично показано одне і теж положення соленоїдів під нижньою площиною. І так треба розглядати і всі наступні пари рисунків, тобто №№ 2 і 2 -Б-, 3 і 3-В-, а також і на фігурі 2. На фігурі 2 діаметральну лінію позначено під №№ 4, 5, 6 і показано, що вона знаходиться під кутом 90 градусів до напрямку зовнішнього магнітного поля. А короткі лінії на них, як уже говорилося, це умовне положення соленоїдів на діаметральні лінії і відповідає їх положенню під нижньою площиною апарата. На правій стороні фігури 1 показано коло з написом під ним "Напрямки польоту магнітоплана". Це коло поділено пунктирними лініями, зі стрілками на кінцях, на вісім рівних частин, тобто поділено на частини через кожні 45 градусів. Центр цього кола, це умовна точка знаходження магнітоплана на місцевості. А замкнута крива лінія, тобто коло, навколо апарата це умовно крива лінія горизонту навколо нього. А пунктирні лінії зі стрілками на цьому колі показують, що апарат після вертикального старту і набору достатньої висоти над цією точкою може повернути будь-яку із восьми вказаних сторін. І далі він продовжує політ по вказаній схемі польоту. Обмеження кутів поворотів (маневрів у просторі) пов'язане з постійним підтриманням достатньої взаємодії магнітних полів апарата і зовнішнього магнітного поля, при якій виникає штовхаюча сила, що приводить його в рух. В перелік фігур креслення додаються два рисунки магнітоплана 1 і 2. На рисунку 1 під пунктом 1 показано корпус магнітоплана, п. 2 - частина корпусу, в якій знаходиться магнітний двигун, п. 3 - нижня частина корпуса апарата, в якій знаходиться відсік машинного відділення, п. 4 - кабіна екіпажа, п. 5 - місце знаходження антени радіолокатора. На рисунку 2 під пунктом 1 показано корпус магнітоплана, п. 2 - частина корпуса, в якій знаходиться магнітний двигун, п. 3 - надпровідні несучі соленоїди, п. 4 - нижня частина апарата, в якій знаходиться відсік машинного відділення, п. 5 - кабіна екіпажа, п. 6 - місце знаходження антени радіолокатора. Спосіб керування мінні топ ланом - космічним кораблем в міжзоряному просторі Політ і спосіб керування магнітопланом у космічному просторі далеко за межами дії магнітного поля Землі і нашого Сонця також відбувається по вище вказаній схемі польотів. Відомо, що у міжзоряному просторі магнітне поле набагато слабше за магнітне поле Землі і Сонця. Але при нульовій вазі багатотонної маси магнітоплана - космічного корабля, буде достатньо і дуже слабкого міжзоряного магнітного поля, щоб опиратися на нього, маневрувати і літати з фантастичною швидкістю. Головним орієнтиром для його двигуна (двигунів) буде напрямок силових ліній відповідного зовнішнього магнітного поля. А рухоме кріплення несучих соленоїдів (див. рис. 2, п. 3) в ньому (в них) дозволяє відхиляти їх в ту чи іншу сторону, відповідно до вказаної схеми польотів. Як уже говорилося, при цьому буде мінятися і напрямок сил, які діють на корпус апарата і він буде міняти курс польоту. Під дзеркальною поверхнею корпуса магнітоплана (п. 1 і п. 2), особливо під обшивкою пульта керування (п. 5) і машинного відділення (п. 4), прокладено по спеціальній схемі провідник по якому пропускається електричний струм для створення навколо них необхідного по силі керованого магнітного поля. Воно разом з дзеркальною поверхнею корпуса буде захищати екіпаж від космічної радіації. А при вході апарата в зону підвищеної радіації, автоматично включається обертання контурів, які створять навколо корпуса достатньо сильне 7 UA 112919 U 5 10 захисне електричне поле. Після виходу апарата із небезпечної зони обертання контурів виключається. Їх також включають для стабілізації його корпуса відносно лінії курсу, коли виникає в ній потреба, для ослаблення дії на апарат зовнішньої гравітації і обході стороною її джерело, якщо вона представляє небезпеку та в інших випадках. Під час цього польоту апарат може входити в зону більш слабкого або більш сильного зовнішнього магнітного поля і переведення його на опору на те чи інше магнітне поле відбувається автоматично під контролем бортового комп'ютера. При цьому в несучі соленоїди подається більший або менший по силі електричний струм. Цими діями регулюється несуча потужність магнітоплана і підтримується його швидкість. Під його контролем проводиться вся навігаційна та інша робота. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 35 40 Спосіб керування гравітацією і польотом магнітоплана у просторі, що здійснюють за допомогою надпровідного магнітного двигуна Маг-8, який встановлюють у центрі його круглого корпусу, з кабіною екіпажу зверху і атомною силовою установкою у машинному відділенні внизу, яка виробляє і постачає електричну енергію у вказаний магнітний двигун, який своїми круглими надпровідними контурами, обертовими в протилежних напрямках, під впливом дії надпотужних магнітних потоків контурних соленоїдів циліндричної форми створює надсильне електричне поле, генеруюче потоки гравітаційних хвиль, які знижують щільність силових ліній зовнішнього гравітаційного поля навколо апарата і відштовхують їх в бік від всієї довжини дуги його круглого корпусу, крім того, при обертанні контурів виникає гіроскопічний момент, який постійно утримує магнітоплан у горизонтальному положенні і не дозволяє йому завалитись в будь-яку сторону, і одночасно надпровідні несучі соленоїди конусної форми, які закріпленні рівномірно під його нижньою площиною, збуджуються і створюють довгі надсильні потоки магнітної індукції, генеруючі також потоки гравітаційних хвиль, які відштовхують силові лінії зовнішнього гравітаційного поля з-під низу апарата за край його круглого борту, де вони попадають під відштовхуючу дію потоків гравітаційних хвиль обертових контурів, і ці антигравітаційні сили, створені двигуном навколо магнітоплана, роблять його невагомим, а також, цією силою і її впливом на зовнішнє гравітаційне поле навколо магнітоплана, і відповідно, і на вагу його маси, можна керувати, - регулюючи величину напруженості (збільшуючи чи зменшуючи її) надсильного електричного поля працюючих контурів і швидкості їх обертання, яке автоматично, синхронно приводить до генерування ним більш сильного (більш щільного), або меншого по силі (менш щільного) потоків гравітаційних хвиль, тобто антигравітації, які (яка) автоматично, синхронно впливають (впливає) на щільність силових ліній зовнішнього гравітаційного поля навколо магнітоплана і на віддалення їх на більшу чи меншу відстань від нього, і одночасно магнітні потоки несучих соленоїдів, взаємодіючи з магнітним полем Землі, створюють позитивну підйомну силу, яка діє на його корпус, він відривається від поверхні і летить, а керування ним в польоті відбувається несучими соленоїдами, тобто, в яку сторону від його лінії курсу, відповідно до схеми польотів, будуть відхилені магнітні потоки несучих соленоїдів, в протилежну сторону він і полетить, а енергія від атомної силової установки дозволяє підтримувати на борту апарата порядок і умови виконання відповідних дій у часі, при його активному польоті, від зльоту і до посадки. 8 UA 112919 U 9 UA 112919 U Комп’ютерна верстка Т. Вахричева Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F01B 29/00, B64G 1/00
Мітки: керування, магнітоплана, гравітацією, польотом, спосіб, просторі
Код посилання
<a href="https://ua.patents.su/12-112919-sposib-keruvannya-gravitaciehyu-i-polotom-magnitoplana-u-prostori.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування гравітацією і польотом магнітоплана у просторі</a>
Магнітний двигун маг-3 для магнітоплана
Номер патенту: 63739
Опубліковано: 25.10.2011
Автор: Гайдук Анатолій Миколайович
МПК: F01B 29/00, H02K 21/00
Мітки: магнітоплана, двигун, маг-3, магнітний
Формула / Реферат:
1. Магнітний двигун, що містить надпровідне кільце-контур і надпровідні несучі соленоїди, закріплені рухомо під нижньою площиною двигуна, електропривід для надання обертання надпровідному кільцю-контуру, який відрізняється тим, що двигун додатково містить надпровідні контурні соленоїди, закріплені нерухомо під надпровідним кільцем-контуром на однаковій відстані один від одного в перпендикулярній площині до зазначеного кільця- контуру,...
Магнітний двигун маг-7 для магнітоплана
Номер патенту: 64388
Опубліковано: 10.11.2011
Автор: Гайдук Анатолій Миколайович
МПК: F01C 1/00
Мітки: магнітоплана, двигун, маг-7, магнітний
Формула / Реферат:
1. Магнітний двигун, який містить надпровідне кільце-контур і надпровідні несучі соленоїди, закріплені рухомо під нижньою площиною двигуна, електропривод для надання обертання надпровідному кільцю-контуру, який відрізняється тим, що двигун додатково містить - додаткове надпровідне кільце-контур, встановлене над вказаним кільцем-контуром d на одній площині з ним з можливістю обертання відносно до нього в протилежному напрямку, надпровідні...
Магнітний двигун маг-6 для магнітоплана
Номер патенту: 65383
Опубліковано: 12.12.2011
Автор: Гайдук Анатолій Миколайович
МПК: F03G 3/00
Мітки: двигун, магнітоплана, магнітний, маг-6
Формула / Реферат:
1. Магнітний двигун, який містить надпровідне кільце-контур і надпровідні несучі соленоїди, закріплені рухомо під нижньою площиною двигуна, електропривод для надання обертання надпровідному кільцю-контуру, який відрізняється тим, що двигун додатково містить додаткове надпровідне кільце-контур, встановлене над вказаним кільцем-контуром на одній площині з ним з можливістю обертання відносно нього в протилежному напрямку, надпровідні контурні...
Спосіб керування польотом коректованого літального апарата
Номер патенту: 80439
Опубліковано: 25.09.2007
Автори: Целінко Олександр Михайлович, Канєвський Валерій Олександрович, Яковенко Петро Олексійович, Ляденко Андрій Пилипович
МПК: A62B 37/00, G08B 25/00
Мітки: літального, коректованого, апарата, керування, польотом, спосіб
Формула / Реферат:
1. Спосіб керування польотом коректованого літального апарата, який включає запуск безпілотного літального апарата для виходу в район доставки, наведення безпілотного літального апарата на місце доставки, пуск після запуску безпілотного літального апарата іншого безпілотного літального апарата-носія корисного вантажу в район доставки керування польотом безпілотного літального апарата за допомогою радіокомандної лінії керування за допомогою...
Спосіб керування польотом дистанційно пілотованих літальних апаратів при їх груповому використанні
Номер патенту: 58102
Опубліковано: 25.03.2011
Автори: Безкровний Дмитро Володимирович, Припута Іван Петрович, Асланян Альберт Едуардович, Манелюк Олександр Григорович, Балакін Сергій Геннадійович, Польський Павло Вікторович, Сендецький Микола Миколайович, Водчис Олександр Григорович, Хижняк Андрій Сергійович, Башинський Володимир Георгійович, Комаров Володимир Олександрович, Бацман Богдан Сергійович, Столінець Сергій Леонідович, Зарицький Олег Іванович, Кириленко Володимир Анатолійович, Кузнецов Владлен Олександрович, Попов Іван Анатольович, Петєрін Микита Костянтинович, Стеценко Олексій Юрійович, Галушка Володимир Іванович, Ткаченко Володимир Анатолійович, Ляшенко Ігор Олександрович, Добровольський Юзеф Броніславович, Зірка Андрій Леонідович, Лазуренко Олександр Вікторович, Гордієвський Олексій Тихонович, Головещенко Ігор Васильович, Расстригін Олександр Олексійович, Терлецький Ігор Іванович
МПК: G05D 1/00, G01P 5/00, G08G 7/00
Мітки: спосіб, апаратів, польотом, використанні, пілотованих, дистанційно, літальних, груповому, керування
Формула / Реферат:
1. Спосіб керування польотом дистанційно пілотованих літальних апаратів при їх груповому використанні, при якому забезпечують зліт з базових аеродромів або стартових площадок N дистанційно пілотованих літальних апаратів, забезпечують переліт зазначених N літальних апаратів у точку збору, забезпечують у точці збору перебудування в групу, з наступним підльотом до зони протиповітряної оборони супротивника, прольотом/подоланням зони...
Попередній патент: Універсальна автономна поворотна гідравлічна стріла
Наступний патент: Шихта для отримання феронікелю
Випадковий патент: Спосіб одержання пектину з рослинної сировини