Екскаваторний пристрій та екскаваторний пристрій для використання з тягачем


Текст
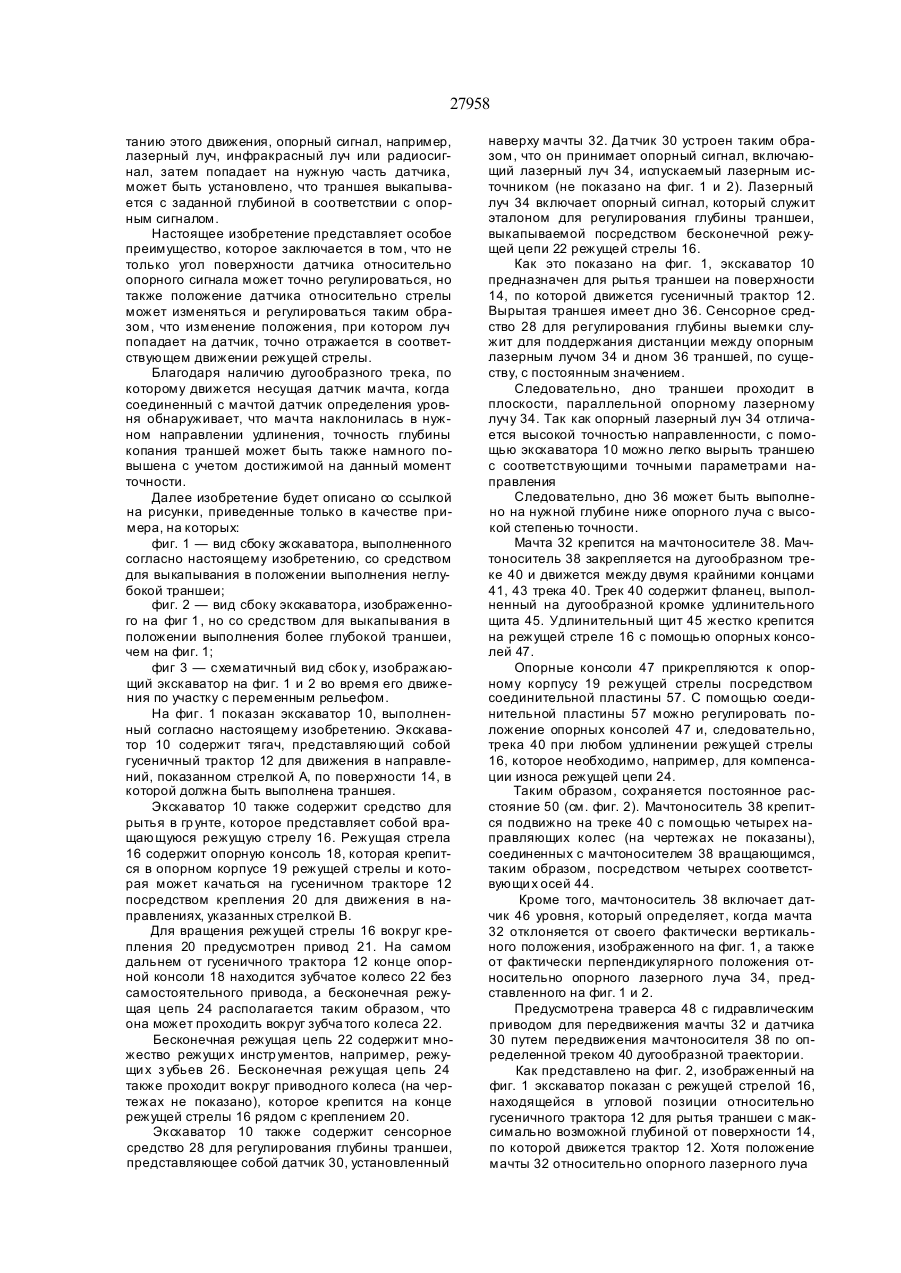
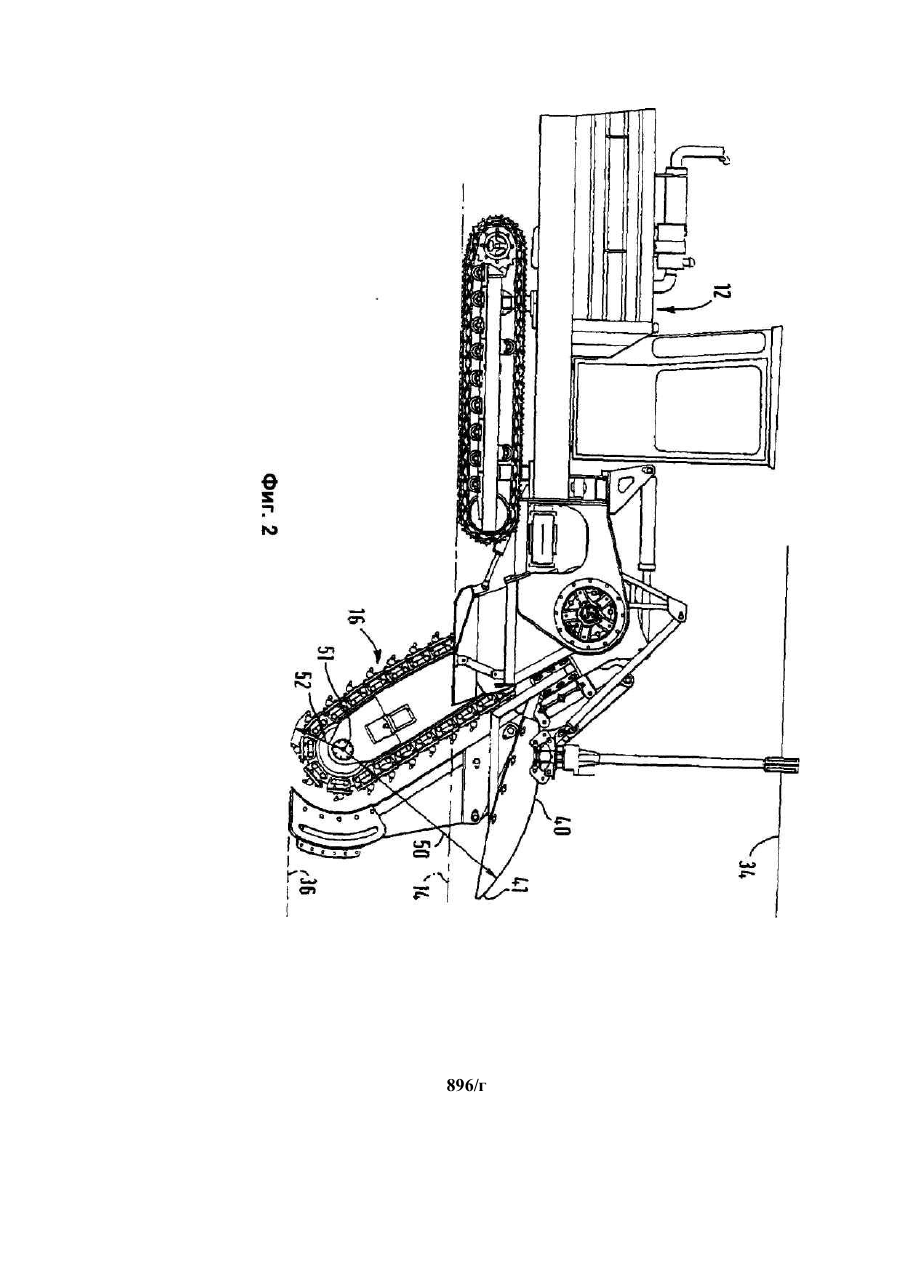
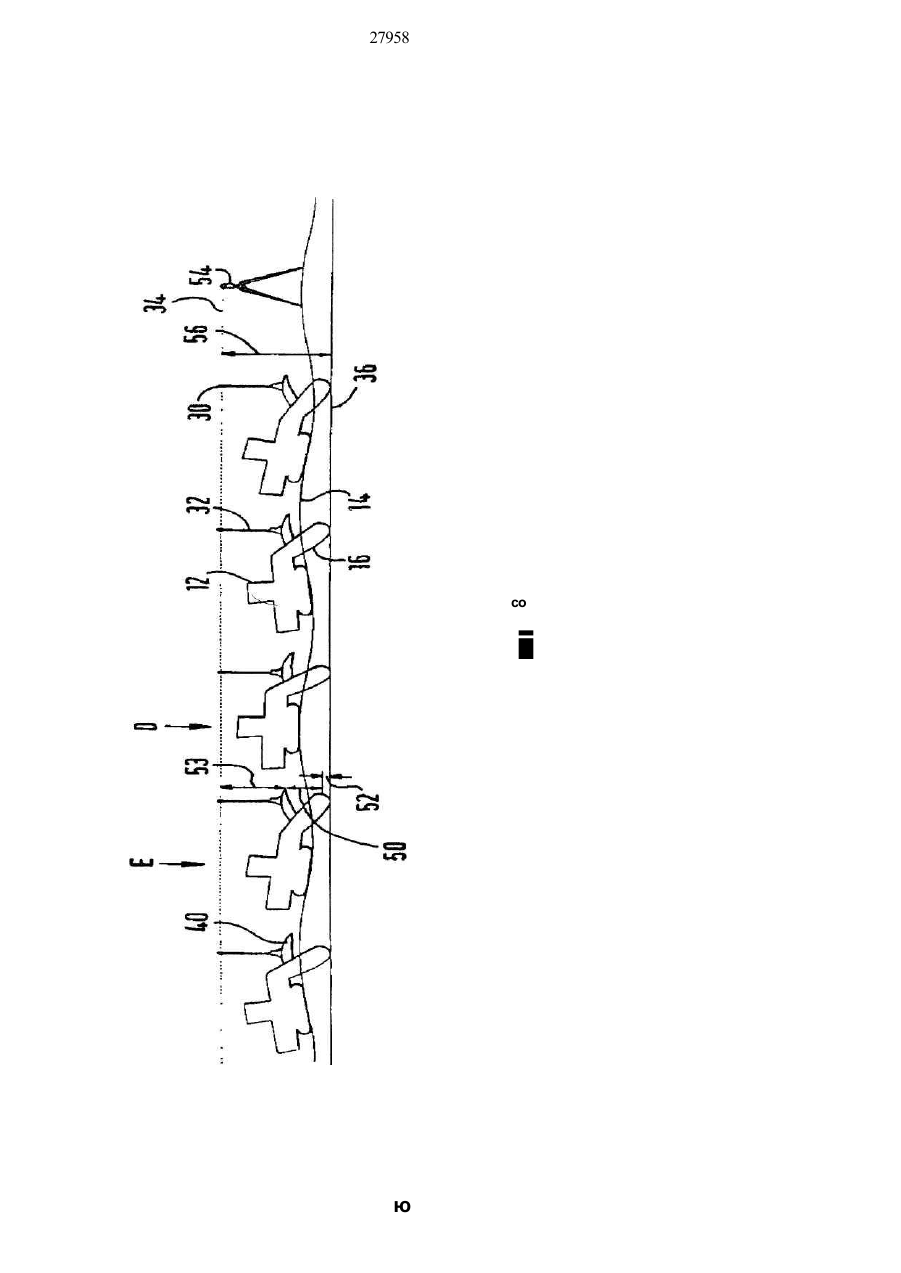
1. Экскаваторное устройство, содержащее тяга ч со средством для выкапывания гр ун та для рытья траншеи, дно которой может быть, по суще ству, параллельно опорном у си гна лу, при этом средство для выкапывания имеет множество ре жущи х инстр ументов, которые на самом нижнем участке это го сре дства движутся по траектории, проходя щей вокруг вра щающе гося элемента в конце указанного средства для выкапывания, уда ленно го о т тя гача, п ри чем указан ное средство имеет сенсорное средство для выявления указан ного опорного сигнала, и указанное средство для выкапывания установлено с возможностью кача ния относительно тягача с целью изменения глу бины указанной траншеи, при этом указанное сен сорное средство является подвижным относи тельно указанного средства для выкапывания, и устройство включает да тчик определения поло жения для определения движения сенсорного средства вне н ужной угловой позиции относи тельно опорно го си гна ла и для пере движения сенсорного средства относительно указанного средства для выкапывания для возвращения сен сорного средства в указанн ую н ужн ую угло вую позицию, отл ичающееся тем, что устройство включае т средство, определяющее траекторию движения указанного сенсорного средства относи тельно указанного средства для выкапывания как дугоо бразн ую траекторию, имеющую центр кри визны в области о си вра щения указанно го вра ща ющегося элемента указанного сре дства для выкапывания , так что , ко гда кача ется средство для выкапывания, указанное сенсорное средство движется относительно указанного тягача по тра ектории, которая, по существу, является такой же по направлению и расстоянию, как и траектория движения относительно указанного тягача самой нижней поверхности указанного средства для выкапывания. 2. Экскаваторное устройство для использования с тягачом, содержащее средство для выкапывания грун та для рытья траншеи, дно которой должно быть, по существу, параллельно опорному сигналу, средство крепления для установки средства для выкапывания на тягаче в действии, причем средство для выкапывания имеет множество режущи х инстр ументов, которые на самом нижнем участке средства для выкапывания движутся по траектории, проходящей вокруг вра щающегося элемента в конце указанного средства для выкапывания, удаленном от средства для крепления, при этом устройство имеет сенсорное средство для выявления указанного опорного сигнала и указанное средство для выкапывания установлено с возможностью качания относительно указанного средства крепления, с целью изменения глубины указанной траншеи, при этом указанное сенсорное средство является подвижным относительно указанного средства для выкапывания и устройство включает датчик определения положения для определения движения сенсорного средства вне нужной угловой позиции относительно опорного сигнала и для передвижения сенсорного средства относительно указанного средства для выкапывания для возвращения сенсорного средства в указанную нужную позицию, отличающееся тем, что устройство включает средство , определяющее траекторию движения указанного сенсорного средства относительно указанного средства для выкапывания как дугообразную траекторию, имеющую центр кривизны в области оси вращения указанного вращающегося элемента указанного средства для выкапывания, так что, когда в действии указанное средство для выкапывания качается, указанное сенсорное средство движется относительно указанного средства крепления по траектории, которая, по существу, является такой же по направлению и расстоянию, как и траектория движения относительно указанного средства крепления самой нижней поверхности указанного средства для выкапывания. 3. Экскаваторное устройство по пп. 1 или 2, в котором центр кривизны расположен на оси вра щения указанного вращающегося элемента сред ства для выкапывания. 4. Устрой ство по любом у из пп . 1 ,2 или 3 , в котором средство для определения траек тории О « 00 ІП СП г*см < 27958 движения указанного сенсорного средства относительно указанного средства для выкапывания содержит дугообразное направляющее средство, имеющее центр кривизны в области оси вращения указанного вращающегося элемента средства для выкапывания. 5. Устройство по п . 4 , в ко тором указан ное сенсорное средство установлено для движения по указанному дугообразному направляющему сред ству. 6. Устрой ство по пп . 4 или 5 , в котором ука занное дугообразное направляющее средство неподвижно установлено на указанном средстве для выкапывания для движения вместе с ним. л 7. Устройство по любом у из пп. 4 , 5 или 6 , в котором указанное дугообразное направляющее средство содержит элемент с дугообразной на правляющей поверхностью, расположенной на нем. 8. Устрой ство по любом у из пп . 4 , 5 и ли 6 , в котором указанное дугообразно направляющее средство содержит элемент с выполненной в нем дугообразной прорезью. 9. Устрой ство по любом у из пп . 4 , 5 и ли 6 , в котором указанное дугообразное направляющее средство содержит дугообразный элемент. 10. Устройство по любому и одному из пп. 4-9, в котором указанное множество режущи х инстр у менто в на уча стке средства для выкапы ван ия, удаленном от тягача, движется, по крайней мере, по полукруговой траектории. 11. Устройство по любому одному из пп. 4-10, в котором центр кривизны указанного дугообраз ного направляющего средства нахо дится на оал вращения указанного вращающегося элемента средства для выкапывания. 12. Устройство по любому предшествующему пункту, в котором вра щающийся элемент со дер жит круговой режущий элемент. 13. Устройство по любому из пп. 1-10, в кото ром вра ща ющийся элемент содержи т з убча тое колесо, несущее режущую цепь. 14. Устройство по любому предыдущему п унк ту, в котором сенсорное средство установлено на мачте , о снование ко торой я вляе тся подвижным относи тельно средства для выкапывания, когда оно качается, и угол мачты относительно опорного сигнала поддерживается постоянным при совер шении такого движения. 15. Устройство по любом у из преды дущи х пунктов, в котором указанный датчик определения положения содержит де текторное сре дство для определения движения сенсорного средства вне указанной нужной угловой позиции относительно опорного сигнала и приводное средство для пере движения сенсорного средства по указанной тра ектории в ответ на изменение выходного си гнала этого детекторного средства. 16. Устройство по п. 15, в котором указанное детекторное средство содержит датчик уровня. 17. Устройство по п. 16, в котором указанный да тчик уро вн я кр епи тся таким о браз ом, что он может двига ться вместе с указанным сенсорным средством. 18. Устройство по любому из пп. 15,16 или 17, в котором указанное приводное средство содер жит гидравлическое приводное средство для пе редвижения указанного сенсорного средства под управлением указанного вы ходно го си гнала ука занного детекторного средства. Настоящее изобретение относится к усовершенствованиям в устройства х для выемки грунта. В частности, устройство для выемки грунта включает трактор с выступающим от него средством для выкапывания грунта, которое может качаться относительно того трактора с целью изменения глубины выемки. Устройство для выемки грунта с поворотной стрелой используется для рытья траншей и т. п. Известно также подобное устройство с вмонтированной системой регулирования глубины копания, с помощью которого регулир уется глубина траншей согласно опорному сигналу, такому, например, как лазерный луч. Подразумевается, что регулир уется угло вое положение режущей стрелы относительно трактора и, следовательно, глубина вырытой траншей с уче том положения, при котором опорный сигнал попадает на сенсорное средство. Сенсорное средство крепится на режущей стреле таким образом, что она движется вместе со стрелой по мере качания последней. Так, когда трактор проходит по неровному участку, датчик движется относительно лазерного луча, и это меняет положение, при котором лазерный луч попадает на датчик. Это вызывает изменение выходного сигнала датчика, и это изменение используется для регу лирования качательного движения режущей стрелы и изменения, таким образом, глубины траншей во время движения трактора по неровному участку. С помощью этого приспособления вырывается траншея, дно которой проходит по параллельной опорному лучу плоскости. Однако известное устройство имеет недостаток, который заключается в том, что точность глубины траншей сильно ограничена, когда трактор движется по участку с переменным рельефом и, следовательно, когда режущая стрела должна поворачиваться. В подобных случая х основание вырытой траншеи не параллельно опорному сигналу. Особенно возникают проблемы в том случае, когда дно траншей должно находиться на определенном уровне, т. е. в том случае, когда нельзя допускать никаких неровностей дна траншей или когда эти изменения должны быть минимальными, если требуется, чтобы дно траншей было ровным, то есть когда не допускается неровность дна траншей или возможна очень незначительная неровность. Это требование, в частности, предъявляется, когда труба или любая иная конструкция, которая должна быть уложена в траншею, должна укладываться на гладкую и плоскую поверхность. В известных устройства х с этим возникает проблема вследствие не точности при поворо те ре 27958 жущей стрелы, которой управляют по изменению положения, при котором опорный сигнал попадает на датчик, установленный с возможностью перемещения вместе с режущей стрелой. Прежде всего, изменение углового положения режущей стрелы относительно трактора неточно отражает изменение положения, при котором опорный луч лазера попадает на сенсорный элемент. То есть изменение положения, при котором луч лазера попадает на датчик, вследствие движения трактора под гору или в гору, не приводит к такому же изменению глубины, на которую режущая стрела опускается ниже трактора. В качестве прототипа выбрано экскаваторное устройство, включающее тягач со средством для выкапывания грунта для рытья траншеи, дно которой может быть, по существу, параллельно опорному сигналу. Средство для выкапывания имеет множество режущих инстр ументов для копания траншей типа цепи, а опорный сигнал подается вращающимся лазерным лучом. Устройство снабжено сенсорным средством для выявления опорного сигнала, а средство для выкапывания установлено с возможностью качания относительно тягача с целью изменения глубины траншей в соответствии с управляющими сигналами, генерируемыми сенсорным средством. Сенсорное средство установлено на мачте, которая установлена на каркасе средства для выкапывания. Устройство снабжено средством для регулирования положения датчика, выполненным в виде маятника и передаточного рычага , для выявления ситуации, когда сенсорное средство выходит из требуемой угловой позиции относительно опорного сигнала, и для перемещения сенсорного средства относительно средства для выкапывания с целью возвращения сенсорного средства в упомянутую требуемую позицию при повороте средства для выкапывания. В одном из вариантов исполнения основание мачты движется в дугообразном кулачковом пазе, предназначенном для регулирования высоты положения сенсорного средства. Задачей настоящего изобретения является создание экскаваторного устройства, обладающего преимуществами по сравнению с известными устройствами. В частности, создание экскаваторного устройства, работающего с использованием опорного сигнала с более высокой степенью точности, чем известные в настоящее время. В соответствии с одним аспектом настоящего изобретения, поставленная задача решается тем, что экскаваторное устройство, содержащее тягач со средством для выкапывания грунта для рытья траншеи, дно которой может быть, по существу, параллельно опорному сигналу, при этом средство для выкапывания имеет множество режущи х инструментов, которые на самом нижнем участке этого средства движутся по траектории, проходящей вокруг вращающегося элемента в конце указанного средства для выкапывания, удаленного от тягача, причем указанное средство имеет сенсорное средство для выявления указанного опорного сигнала, и указанное средство для выкапывания установлено с возможностью качания относительно тягача с целью изменения глубины указанной траншеи, при этом указанное сенсорное средство является подвижным относительно указанного средства для выкапывания, и устройство включает датчик определения положения для определения движения сенсорного средства вне нужной угловой позиции относительно опорного сигнала и для передвижения сенсорного средства относительно указанного средства для выкапывания для возвращения сенсорного средства в указанную нужную угловую позицию, согласно изобретению, включает средство, определяющее траекторию движения указанного сенсорного средства относительно указанного средства для выкапывания как дугообразную траекторию, имеющую центр кривизны в области оси вращения указанного вращающегося элемента указанного средства для выкапывания, так что , когда качается средство для выкапывания, указанное сенсорное средство движется относительно указанного тягача по траектории, которая, по существу, является такой же по направлению и расстоянию, как и траектория движения относительно указанного тягача самой нижней поверхности указанного средства для выкапывания. Настоящее изобретение, таким образом, имеет то преимущество, что любое изменение положения нижней поверхности выкапывания, то есть режущей поверхности средства для выкапывания, которая формирует дно траншеи, относительно трактора вызывает соответствующее изменение положения сенсорного средства. Тягач может представлять собой любой подходящий тип трактора. В соответствии с другим аспектом настоящего изобретения, поставленная задача решается тем, что экскаваторное устройство для использования с тягачом, содержащее средство для выкапывания грунта для рытья траншей, дно которой должно быть, по существу, параллельно опорному сигналу, средство крепления для установки средства для выкапывания на тягаче в действии, причем средство для выкапывания имеет множество режущи х инстр ументов, которые на самом нижнем участке средства для выкапывания движутся по траектории, проходящей вокруг вра щающе гося элемента в конце указанного средства для выкапывания, удаленном от средства для крепления, при этом устройство имеет сенсорное средство для выявления указанного опорного сигнала и указанное средство для выкапывания установлено с возможностью качания относительно указанного средства крепления, с целью изменения глубины указанной траншеи, при этом указанное сенсорное средство является подвижным относительно указанного средства для выкапывания, и устройство включает датчик определения положения для определения движения сенсорного средства вне нужной угловой позиции относительно опорного сигнала и для передвижения сенсорного средства относительно указанного средства для выкапывания для возвращения сенсорного средства в указанную н ужную позицию, согласно изобретению, включает средство, определяющее траекторию движения указанного сенсорного средства относительно указанного средства для выкапывания как дугообразную траекторию, имеющую центр кривизны в области оси вра щения указанного вращающегося элемента указанного средства для выкапывания, так что, когда в действии указанное 27958 средство для выкапывания качается, указанное сенсорное средство движется относительно указанного средства крепления по траектории, которая, по существу, является такой же по направлению и расстоянию, как и траектория движения относительно указанного средства крепления самой нижней поверхности указанного средства для выкапывания. Управление движением датчика, таким образом, особенно удобно тем, что расстояние между датчиком и нижней поверхностью средства для выкапывания остается, по существу, постоянной величиной во время качательного движения средства для выкапывания. Таким образом, независимо от угловой позиции качательного средства для выкапывания относительно трактора, расстояние между нижней поверхностью средства для выкапывания и датчиком, а, следовательно, и опорный сигнал, остается, по существу, постоянным. Соответственно, когда трактор движется по неровностям, средство для выкапывания качается, чтобы компенсировать эти неровности повер хности и тем самым сохранить дно выкапываемой траншей, по существу, параллельным опорному сигналу. Особенно удобно, когда множество режущи х средств на нижнем конце средства для выкапывания перемещается по существенно круговой или, по меньше й мере , по лукр уго во й траек тори и. Центр кривизны полукруго вой траектории, с возможностью перемещения вдоль которой установлено сенсорное средство, в таком случае может удобно совпадать с центром кривизны упомянутой круговой траектории множества режущи х инструментов. В некоторых случаях вращающийся элемент может включа ть в себя круговой режущий элемент. Или же вращающийся элемент может включать в себя паразитное зубчатое колесо, установленное с возможностью вращения и привода режущей цепи. Когда режущие инстр ументы имеют возможность двигаться по такой круговой или, по меньшей мере, полукруговой траектории, нижняя поверхность средства для выкапывания, то есть самый нижний из режущи х элементов, остается на постоянном расстоянии от центра кривизны круговой или полукруговой траектории, независимо от угла средства для выкапывания относительно трактора. Таким образом, поскольку центр кривизны полукруговой траектории сенсорного средства совпадает с центром кривизны траектории режущи х инстр ументов, то есть с осью вращения вращающегося элемента, такое решение оказывается особенно эффективным для поддержания постоянного требуемого расстояния между датчиком и самой нижней поверхностью средства для выкапывания грунта. Предпочтительно, датчик может двига ться по необходимому пути с помощью приводного средства, например, электрического, гидравлического или пневматического. В самом выгодном и простом варианте исполнения изобретения датчик крепится на средство для выкапывания грунта. В частности, да тчик крепится на средство для выкапывания грунта с помощью опорного элемента, который может вклю чать мачту для крепления датчика выше самой верхней части трактора. Предпочтительно, опорное средство для датчика крепится на вынимающем грунт средстве для движения по треку, который выступает от средства для выкапывания грун та. В таком случае трек может преимущественно выступать дугообразным образом, что соответствуе т дуге, по которой должен двигаться датчик. Наличие такого дугообразного трека представляет особое преимущество, так как обеспечивает простое и эффективное средство для движения датчика по нужной траектории. Согласно этому, трек проходит по дугообразной траектории, центр кривизны которой находится в н ужном положении в нижней части средства для выкапывания грунта. В соответствии с этим, изобретение описывает дугообразную траекторию и сенсорное средство, которое крепится таким образом, что оно может двигаться по этой траектории. Предпочтительно, для регулирования движения датчика по указанной траектории предусмотрены контрольные средства, соединенные со средством для выявления изменения положения трактора относительно опорного сигнала. В этом случае контрольные средства могут включать детектор уровня для выявления того Ч^мрмента, когда трактор движется вверх или вниз по неровностям поверхности. Действительно, если выгодно удерживать датчик и, в частности, соединенную с ним мачту фактически перпендикулярно к опорному сигналу, то может быть предусмотрено сенсорное средство для определения уровня с целью удерживания датчика в такой перпендикулярной зависимости с опорным сигналом. В особенно выгодном варианте исполнения изобретения, когда датчик определения уровня обнаружит, что из-за движения трактора вверх или вниз и/или из-за вращательного движения вынимающего грунт средства датчик больше не перпендикулярен опорному лучу, могут быть приведены в действие приводные средства для того, чтобы заставить датчик двигаться по дугообразной траектории. Другое преимущество и особенно упрощенная операция могут иметь место в том случае, если несущее датчик средство, например мачта, выступает в направлений радиуса кривизны дугообразной траектории движения датчика. Так, независимо от положения датчика на его возможной дугообразной траектории несущее датчик средство выступает в радиальном направлений таким образом, что движение датчика по его радиальной траектории с целью возвращения датчика в положение, которое, по существу, перпендикулярно опорному лучу, служит для удерживания датчика в положений необходимого разнесения от самой нижней поверхности средства для выкапывания грунта. Таким образом, когда трактор движется вверх или вниз относительно опорного сигнала, датчик определяет, что средство для выкапывания должно поворачиваться, а датчик определения уровня определяет, что датчик должен следовать по его дугообразной траектории. Когда, благодаря соче 27958 танию этого движения, опорный сигнал, например, лазерный луч, инфракрасный луч или радиосигнал, затем попадает на нужную часть датчика, может быть установлено, что траншея выкапывается с заданной глубиной в соответствии с опорным сигналом. Настоящее изобретение представляет особое преимущество, которое заключается в том, что не только угол поверхности датчика относительно опорного сигнала может точно регулироваться, но также положение датчика относительно стрелы может изменяться и регулироваться таким образом, что изменение положения, при котором луч попадает на датчик, точно отражается в соответствующем движении режущей стрелы. Благодаря наличию дугообразного трека, по которому движется несущая датчик мачта, когда соединенный с мачтой датчик определения уровня обнаруживает, что мачта наклонилась в нужном направлении удлинения, точность глубины копания траншей может быть также намного повышена с учетом достижимой на данный момент точности. Далее изобретение будет описано со ссылкой на рисунки, приведенные только в качестве примера, на которых: фиг. 1 — вид сбоку экскаватора, выполненного согласно настоящему изобретению, со средством для выкапывания в положении выполнения неглубокой траншеи; фиг. 2 — вид сбоку экскаватора, изображенного на фиг 1 , но со средством для выкапывания в положении выполнения более глубокой траншеи, чем на фиг. 1; фиг 3 — схематичный вид сбок у, изображающий экскаватор на фиг. 1 и 2 во время его движения по участку с переменным рельефом. На фиг. 1 показан экскаватор 10, выполненный согласно настоящему изобретению. Экскаватор 10 содержит тягач, представляющий собой гусеничный трактор 12 для движения в направлений, показанном стрелкой А, по поверхности 14, в которой должна быть выполнена траншея. Экскаватор 10 также содержит средство для рытья в гр унте, которое представляет собой вращающуюся режущую стрелу 16. Режущая стрела 16 содержит опорную консоль 18, которая крепится в опорном корпусе 19 режущей стрелы и которая может качаться на гусеничном тракторе 12 посредством крепления 20 для движения в направлениях, указанных стрелкой В. Для вращения режущей стрелы 16 вокруг крепления 20 предусмотрен привод 21. На самом дальнем от гусеничного трактора 12 конце опорной консоли 18 находится зубчатое колесо 22 без самостоятельного привода, а бесконечная режущая цепь 24 располагается таким образом, что она может проходить вокруг зубча того колеса 22. Бесконечная режущая цепь 22 содержит множество режущи х инстр ументов, например, режущи х з убьев 26. Бесконечная режущая цепь 24 также проходит вокруг приводного колеса (на чертежах не показано), которое крепится на конце режущей стрелы 16 рядом с креплением 20. Экскаватор 10 также содержит сенсорное средство 28 для регулирования глубины траншеи, представляющее собой датчик 30, установленный наверху мачты 32. Да тчик 30 устроен таким образом, что он принимает опорный сигнал, включающий лазерный луч 34, испускаемый лазерным источником (не показано на фиг. 1 и 2). Лазерный луч 34 включает опорный сигнал, который служит эталоном для регулирования глубины траншеи, выкапываемой посредством бесконечной режущей цепи 22 режущей стрелы 16. Как это показано на фиг. 1, экскаватор 10 предназначен для рытья траншеи на поверхности 14, по которой движется гусеничный трактор 12. Вырытая траншея имеет дно 36. Сенсорное средство 28 для регулирования глубины выемки служит для поддержания дистанции между опорным лазерным лучом 34 и дном 36 траншей, по существу, с постоянным значением. Следовательно, дно траншеи проходит в плоскости, параллельной опорному лазерному лучу 34. Так как опорный лазерный луч 34 отличается высокой точностью направленности, с помощью экскаватора 10 можно легко вырыть траншею с соответствующими точными параметрами направления Следовательно, дно 36 может быть выполнено на нужной глубине ниже опорного луча с высокой степенью точности. Мачта 32 крепится на мачтоносителе 38. Мачтоноситель 38 закрепляется на дугообразном треке 40 и движется между двумя крайними концами 41, 43 трека 40. Трек 40 содержит фланец, выполненный на дугообразной кромке удлинительного щита 45. Удлинительный щит 45 жестко крепится на режущей стреле 16 с помощью опорных консолей 47. Опорные консоли 47 прикрепляются к опорному корпусу 19 режущей стрелы посредством соединительной пластины 57. С помощью соединительной пластины 57 можно регулировать положение опорных консолей 47 и, следовательно, трека 40 при любом удлинении режущей стрелы 16, которое необходимо, например, для компенсации износа режущей цепи 24. Таким образом, сохраняется постоянное расстояние 50 (см. фиг. 2). Мачтоноситель 38 крепится подвижно на треке 40 с помощью четырех направляющих колес (на чертежах не показаны), соединенных с мачтоносителем 38 вращающимся, таким образом, посредством четырех соответствующи х осей 44. Кроме того, мачтоноситель 38 включает датчик 46 уровня, который определяет, когда мачта 32 отклоняется от своего фактически вертикального положения, изображенного на фиг. 1, а также от фактически перпендикулярного положения относительно опорного лазерного луча 34, представленного на фиг. 1 и 2. Предусмотрена траверса 48 с гидравлическим приводом для передвижения мачты 32 и датчика 30 путем передвижения мачтоносителя 38 по определенной треком 40 дугообразной траектории. Как представлено на фиг. 2, изображенный на фиг. 1 экскаватор показан с режущей стрелой 16, находящейся в угловой позиции относительно гусеничного трактора 12 для рытья траншеи с максимально возможной глубиной от поверхности 14, по которой движется трактор 12. Хотя положение мачты 32 относительно опорного лазерного луча 27958 луча удерживается фактически перпендикулярным, при сравнении фиг. 1 и 2 видно, что мачтоноситель 38 прошел по всей длине трека 40, т. е. от его одного конца 41 (фиг. 1) до его другого конца 43 (фиг. 2). Как описано ниже, движение мачтоносителя 38 по дугообразному трек у 40 служит для то го, чтобы удерживать точную дистанцию между датчиком 30 и самой нижней режущей поверхностью режущей стрелы 16. Это, в свою очередь, служит^ для того, чтобы удерживать дно 36 траншеи на нужном расстоянии от опорного лазерного луча 34. Мачта 32 крепится жестким образом на мачтоносителе 38 таким образом, что исключается любое движение между мачтой 32 и мачтоносителем 38. Также точная траектория, определяемая дугообразным треком 40, имеет центр кривизны, который совпадает с осью 51 вращения зубчатого колеса 22. Таким образом, в каком бы положений на треке 40 ни находился мачтоноситель 38, как это видно на рисунках, мачта 32 всегда будет выступать в радиальном направлений от центра кривизны трека 40, т. е. оси 51 вращения зубчатого колеса 22. Следовательно, дистанция между осью 51 вращения зубчатого колеса 22 и датчиком 30 будет оставаться постоянной и будет представлять собой сумму радиуса 50 кривизны трека 40 и высоты мачты 32 и датчика 30. Так как бесконечная режущая цепь 24 проходит по дугообразной траектории с центром на оси 51 вращения зубчатого колеса 22, расстояние 52 между осью 51 вращения зубчатого колеса 22 и самой нижней режущей поверхностью стрелы 16, т. е. той частью режущей стрелы 16, которая выкапывает самую глубокую часть траншеи, остается постоянным, каким бы ни было угловое соотношение между режущей стрелой 16 и трактором 12. Так, путем регулирования движения мачтоносителя 38 по треку 40 по мере того, как режущая стрела 16 движется между двумя крайними положениями, показанными на фиг. 1 и 2, разнесение между датчиком 30 и самой нижней режущей поверхностью режущей стрелы 16 может оставаться, по существу, постоянным. Согласно этому, путем удерживания датчика 30 в таком положении относительно опорного лазерного луча 34, когда последний попадает намеренно на определенную часть датчика 30, дно 36 траншеи может проходить в плоскости, фактически параллельной опорному лазерному лучу 34. Точная направленность опорного луча 34, таким образом, отражается с точностью в гладком и ровном дне 36 траншеи, выполненном на необходимом уровне. К тому же, благодаря центрированию центра кривизны трека на оси вращения зубчатого колеса 22, экскаватор может быть успешно использован с режущей стрелой, снабженной зубчатым колесом с любым нужным радиусом, требуя только незначительной подгонки. В соответствии с представленным вариантом, расположенный на мачтоносителе 38 датчик 46 уровня используется для определения того, когда и как далеко мачтоноситель 38 должен продвинуться на треке 40 с целью удерживания необходимого расстояния между да тчиком 3 0 и самой нижней режущей поверхностью режущей стрелы 16 во время вращения стрелы 16. Например, при анализе движения режущей стрелы 16 от показанного на фиг. 1 положения до положения, показанного на фиг. 2 , видно, что такое вращательное движение заставляет мачту 32 наклоняться вправо, как это показано на фиг. 1. Датчик 46 уровня выявляет этот наклон и соответствующее этому наклону движение, направленное от вертикального положения мачты 32, как показано на фиг. 1. Датчик 46 уровня, который может включать ртутный выключатель, контролирует работу гидравлического приводного рычага 48 таким образом, что мачтоноси те ль 38 движется вле во на фиг. 1 . Это движение по дугообразному треку 40 не только уменьшает высоту да тчика 30 относительно трактора 12, но также служит для возвращения датчика 30 в его, по существу, перпендикулярное положение относительно опорного лазерного луча 34. В результате этого , поддерживается необходимая дистанция между самой низкой режущей поверхностью режущей стрелы 16 и датчиком 30. Разумеется, датчик 46 уровня служит также для возвращения мачты 32 в ее правильное положение, в котором она фактически перпендикулярна опорному лазерному лучу, как это показано на фиг. 1 и 2. Изобретение представляет особое преимущество в том случае, когда участок, по которому должен пройти трактор 12, отличается переменным рельефом. В такой ситуации траншея также может быть вырыта с дном 36, фактически параллельным опорному лазерному лучу 34. В этом случае глубина копания траншеи изменяется в зависимости от рельефа участка. Фиг. 3 представляет собой схему пяти положений экскаватора 10 на фиг. 1 и 2 в момент его движения в направлении стрелки С по поверхности 14 земли с различным рельефом, как показано. Лазерный источник 54 устанавливается таким образом, что он вырабатывает опорный лазерный луч 34, который проходит фактически в горизонтальном направлении. Разумеется, опорный сигнал может быть направлен под углом таким образом, что дно траншеи имеет соотве тствующий наклон. Лазерный луч 34 служит в качестве опорного луча, так что дно траншеи 36 выполняется, по существу, параллельно опорному лучу 34 даже в том случае, если повер хность, по которой про ходи т трактор 12, изменяется. Так, по мере того, как трактор 12 проходит по поверхности 14, угловое положение режущей стрелы 16 относительно трактора 12 изменяется таким образом, что изменяется глубина копания. Точно также, так как угловое положение режущей стрелки 16 относительно трактора 12 изменяется, мачта 32 движется по дугообразному треку 40 таким образом, что мачта удерживается фактически в вертикальном положении, как это показано на фиг. 1 и 2, и , следовательно, фактически перпендикулярно опорному лазерному лучу 34. Перед работой экскаватор регулируется таким образом, что разнесение между датчиком 30 и самой нижней поверхностью режущей цепи 24, т. 27958 е. самой нижней поверхностью режущи х зубьев 26, соо тветствует н ужном у расстоянию между дном 36 траншеи и опорным лазерным лучом 34. По мере того , как режущая цепь 24 вынимает грун т с н ужной глубины, она приводится на эту глубину, и режущая стрела поворачивается, т. е. до те х пор, пока датчик 30 принимает опорный лазерный луч 34. Датчик 30 затем калибруется таким образом, что положение, при котором лазерный луч 34 попадает на датчик, было бы правильным с учетом нужного уровня дна 36 траншеи. Любое отклонение от этого положения способно заставить режущую стрелу 16 поворачиваться и. таким образом, компенсировать отклонения в поверхности участка, как описано далее. Вмонтированный в мачтоноситель 38 датчик 46 уровня служит для регулирования движения мачтоносителя 38, как описано выше со ссылкой на фиг. 1 и 2. Так, мачтоноситель 38 движется по треку 40 таким образом, чтобы удерживать необходимое расстояние между датчиком 30 и самой нижней режущей поверхностью режущей стрелы 16. Действие, согласно изобретению, конкретно проиллюстрировано со ссылкой на движение трактора 12 между положениями В и Е на фиг. 3. Когда трактор 12 движется из положения В, он движется вниз, и, следовательно, опорный лазерный луч 34 начинает попадать на более высокую часть датчика 30 по сравнению с той частью, куда он попадал до этого. Это изменение в месте попадания лазерного луча на датчик 30 регистрируется датчиком 30, и в ответ на это контрольное устройство (не показано) определяет, что трактор движется вниз. Следовательно, чтобы поддерживать дно 36 траншеи на нужном уровне, контрольное устройство заста вляет режущую стрелу 16 поворачиваться в направлении против часовой стрелки. В результате это го, поднимается самая нижняя режущая поверхность режущей стрелы 16 относительно трактора. Поворотное движение режущей стрелы 16 продолжается до тех пор, пока вертикальное положение датчика 30 не станет таким, что опорный лазерный луч 34 попадет снова на нужную часть датчика 30. Это указывает на то, что траншея выполняется с дном 36, находящимся на нужном расстоянии от опорного сигнала 34. С целью поддержания этого необходимого разнесения, важно, чтобы расстояние между датчиком 30 и самой нижней режущей поверхностью режущей стрелы 16 оставалось фактически постоянным, независимо от углового положения режущей стрелы 16 относительно трактора 12. Так как трактор 12 начинает двигаться вниз из положения D в положение Е, вмонтированный в мачтоноситель 38 датчик 46 уровня инициирует работу гидравлической приводной траверсы 48 с тем, чтобы двигать мачтоноситель 38 по треку 40 до тех пор, пока датчик 46 уровня не укажет на то, что мачта 32 снова находится в нужном положении. Это нужное положение является таким положением, в котором мачта 32 фактически перпендикулярна опорному лазерному лучу 34, а датчик в этом случае находится на нужном расстоянии от дна 36 траншеи. Как будет видно, движение мачтоносителя 38 по треку 40 и следовательно, движение мачты 32 и датчика 30 определяется расстоянием, на которое режущая стрела 16 повернулась относительно трактора 12, чтобы удержать датчик 30 в нужном положении по отношению к лазерному опорному лучу 34. Как будет ясно видно на фиг. 3, это движение служит для точного поддержания необходимого расстояния между датчиком 30 и дном 36 траншеи. Как показано на фиг. 3 , это расстояние включает высоту мачты 53, радиус 50 кривизны дугообразного трека 40 и радиус 52 кривизны полукруговой траектории, по которой движется бесконечная режущая цепь 24 вокруг зубчатого колеса 22. К тому же, так как мачтоноситель 38 проходит вокруг дугообразного трека 40, это расстояние остается постоянным независимо от высоты над дном траншеи, на которой находится в данный момент трактор. Разумеется, трек 40 может быть выполнен в любой пригодной форме, например, в виде элемента с дугообразной поверхностью, как представлено на рисунке, или с дугообразной щелью, выполненной в треке. Несмотря на то, что изобретение представлено со ссылкой на описанные выше конкретные варианты исполнения, возможно осуществить множество модификаций и вариантов в пределах области настоящего изобретения. Специалисту данной области станет понятно, что движение датчика 30 и мачты 32 может быть вызвано с помощью направляющего контрольного средства, а не с помощью показанного дугообразного трека 40. Особое требование заключается в том, что во время поворотного движения режущей стрелы 16 датчик 30 должен двигаться в том же направлении и на то же расстояние, что и самая низкая режущая поверхность режущей стрелы 16. А также могут быть использованы любые режущие средства на режущей стреле 16, а опорный сигнал может включать инфракрасный луч или радиосигнал. Кроме того, чтобы допустить любые вариации рельефа в направлении, перпендикулярном продольному направлению траншеи, трактор может быть оборудован компенсирующим боковой наклон средством, доступным в настоящее время. Экскаватор может быть дополнительно снабжен распределительным ящиком, обычно расположенным за режущей стрелой в направлении движения, для засыпания материала, например, гравия, или установки оборудования, например, участков трубопровода или кабеля в траншею. 27958 896/г 27958 со і ю 27958 ДП "Український інститут промислової власності" (Укрпатент) Бульв. Лесі Українки, 26, Київ, 01133, Україна (044) 254-42-30, 295-61-97 Підписано-до др ук у У ^т 2001 р. Формат 60 x84 ,1/8. Обся г /,3 о бл.-вй д.арк . Тир аж50 при м. Зам. 6 УкрІНТЕІ Вул. Горького, 180, Київ, 03680 МСП, Україна (044) 268-25-22 11
ДивитисяДодаткова інформація
Автори англійськоюGilhowd Jack
Автори російськоюГилхоуд Джек
МПК / Мітки
Мітки: використання, тягачем, пристрій, екскаваторний
Код посилання
<a href="https://ua.patents.su/12-27958-ekskavatornijj-pristrijj-ta-ekskavatornijj-pristrijj-dlya-vikoristannya-z-tyagachem.html" target="_blank" rel="follow" title="База патентів України">Екскаваторний пристрій та екскаваторний пристрій для використання з тягачем</a>
Пристрій для загрузки кузова автомобіля тягачем
Номер патенту: 1124
Опубліковано: 30.12.1993
Автор: Колісниченко Всеволод Михайлович
МПК: B65G 67/04
Мітки: пристрій, кузова, автомобіля, тягачем, загрузки
Формула / Реферат:
Формула изобретенияУстройство для загрузки кузова автомобиля тягачом, содержащее ковш, закрепленный на раме кузова с возможностью его поворота, отличающееся тем, что, с целью упрощения загрузки и удобства обслуживания, оно снабжено стойкой с направляющим блоком и тяговым канатом, при этом стойка установлена в кузове, а направляющий блок - на свободном конце стойки, при этом тяговый канат запасован в направляющем блоке и связан с ковшом...
Пристрій для завантаження кузова автомобіля тягачем
Номер патенту: 14981
Опубліковано: 04.03.1997
Автор: Колісниченко Всеволод Михайлович
МПК: B65G 67/04
Мітки: автомобіля, завантаження, пристрій, кузова, тягачем
Формула / Реферат:
Устройство для загрузки кузова автомобиля тягачом, содержащее ковш, соединенный тяговым канатом с тягачом направляющий блок каната, закрепленный на кузове, отличающееся тем, что ковш отсоединен от кузова и привязан к тяговому канату верхними и нижними боковыми точками с возможностью отсоединения нижних точек, и на заднюю кромку пола кузова и почву установлен настил.
Пристрій для перевантаження гірничої маси при підземній розробці вугільних родовищ
Номер патенту: 148
Опубліковано: 30.04.1993
Автори: Федосенко Микола Андрійович, Савінський Віктор Якович, Труфанов Валерій Олексійович, Пророченко Валерій Іванович, Чернуха Юрій Іванович, Галкін Микола Олександрович, Глухов Георгій Іванович, Ружелович Петро Степанович, Нестеренко Микола Іванович, Овчинніков Віталій Пилипович
МПК: E21F 13/00, E21C 41/18
Мітки: вугільних, розробці, родовищ, маси, перевантаження, підземний, гірничої, пристрій
Формула / Реферат:
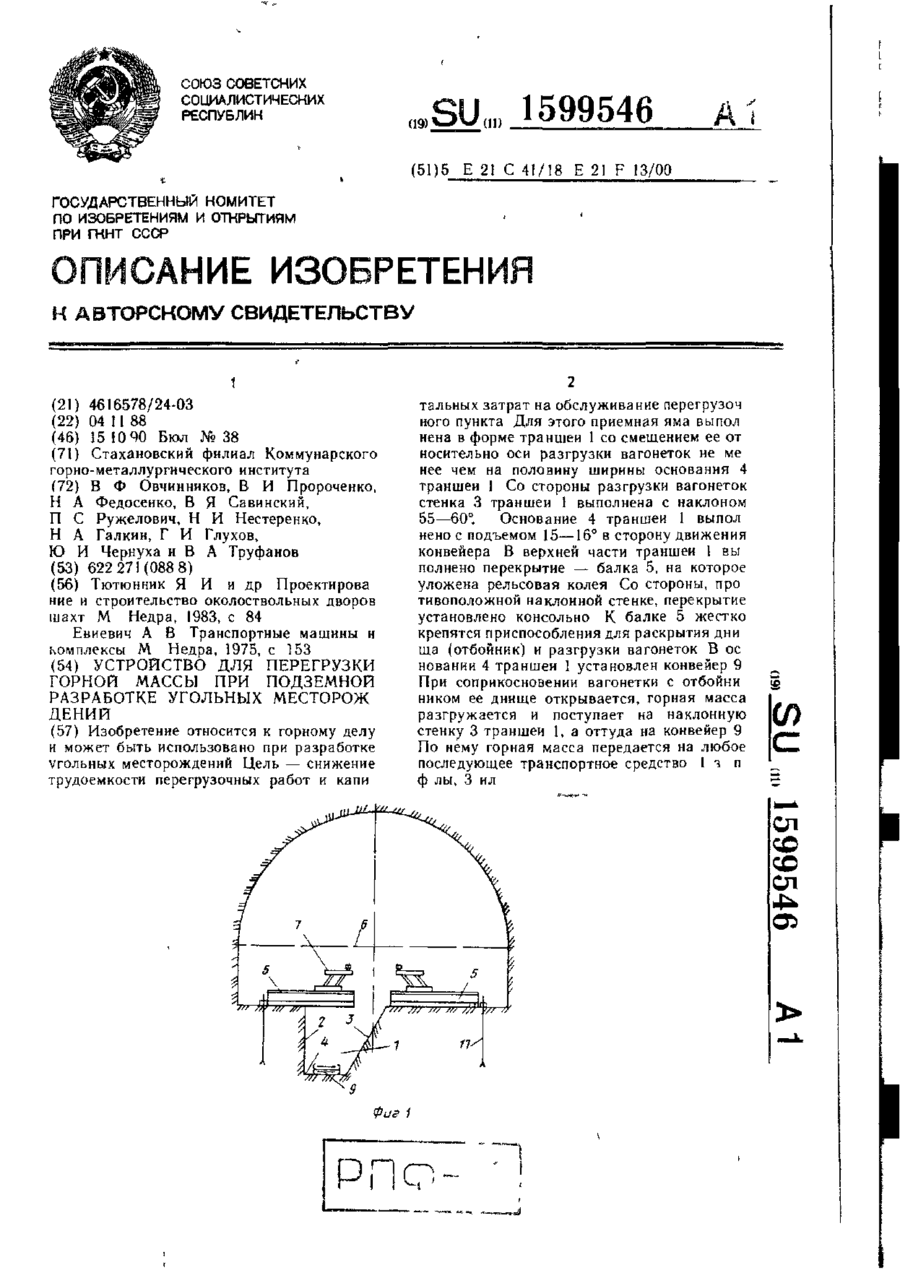
Формула изобретения1. Устройство для перегрузки горной массы при подземной разработке угольных месторождений, включающее приемную яму с перекрытием в верхней ее части, рельсовую колею, уложенную на перекрытии, конвейер, установленный в основании приемной ямы, и приспособления для раскрытия днища и разгрузки вагонеток, жестко соединенные с перекрытием, отличающееся тем, что, с целью снижения трудоемкости перегрузочных работ и...
Екскаваторний робочий орган прохідницького щита
Номер патенту: 1535
Опубліковано: 25.07.1994
Автори: Трубчанін Віктор Іванович, Нестеренко Віталій Григорович, Зенін Костянтин Михайлович, Мірошников Юрій Миколайович, Проніна Тетяна Василівна, Фішман Йосип Давидович
МПК: E21D 9/06
Мітки: екскаваторний, щита, орган, робочий, прохідницького
Формула / Реферат:
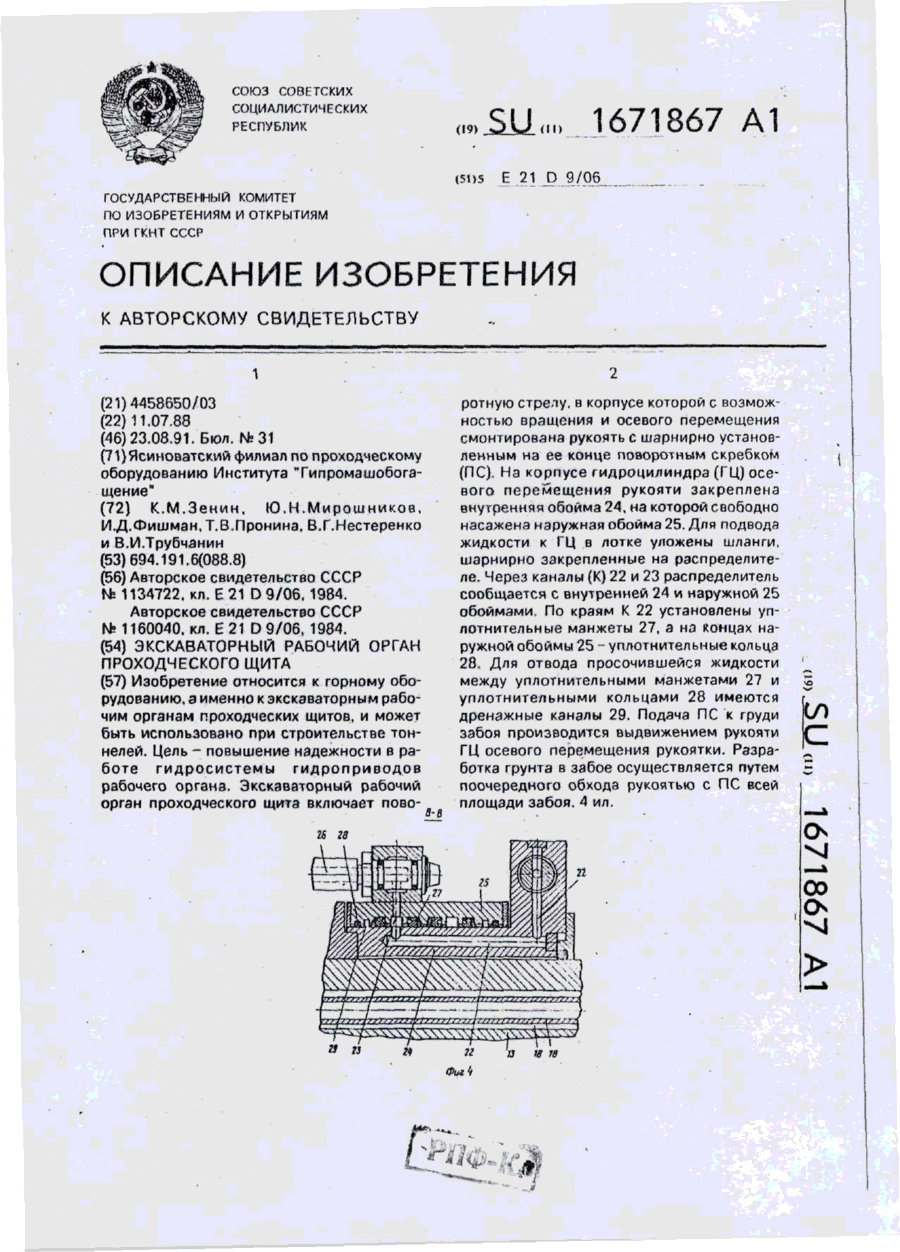
Экскаваторный рабочий орган проходческого щита, включающий поворотную стрелу, в корпусе которой установлена с возможностью вращения и осевого перемещения рукоять с шарнирно установленным на ее конце поворотным скребком, гидроцилиндр поворота стрелы, привод вращения рукояти и гидроцилиндр осевого перемещения, шток которого соединен с корпусом поворотной стрелы, а корпус - с рукоятью, отличающийся тем, что, с целью повышения надежности работы...
Пристрій для викопування коренеплодів з попередньо обрізаною гичкою
Номер патенту: 7746
Опубліковано: 26.12.1995
Автори: Усіков Григорій Степанович, Бойко Віктор Григорович, Кожушко Дмитро Ігнатович, Русанов Іван Іванович, Юрченко Олександр Володимирович, Покуса Олексій Олександрович, Кузьмінов Вадим Георгійович
МПК: A01D 25/04
Мітки: гичкою, коренеплодів, обрізаною, попередньо, викопування, пристрій
Формула / Реферат:
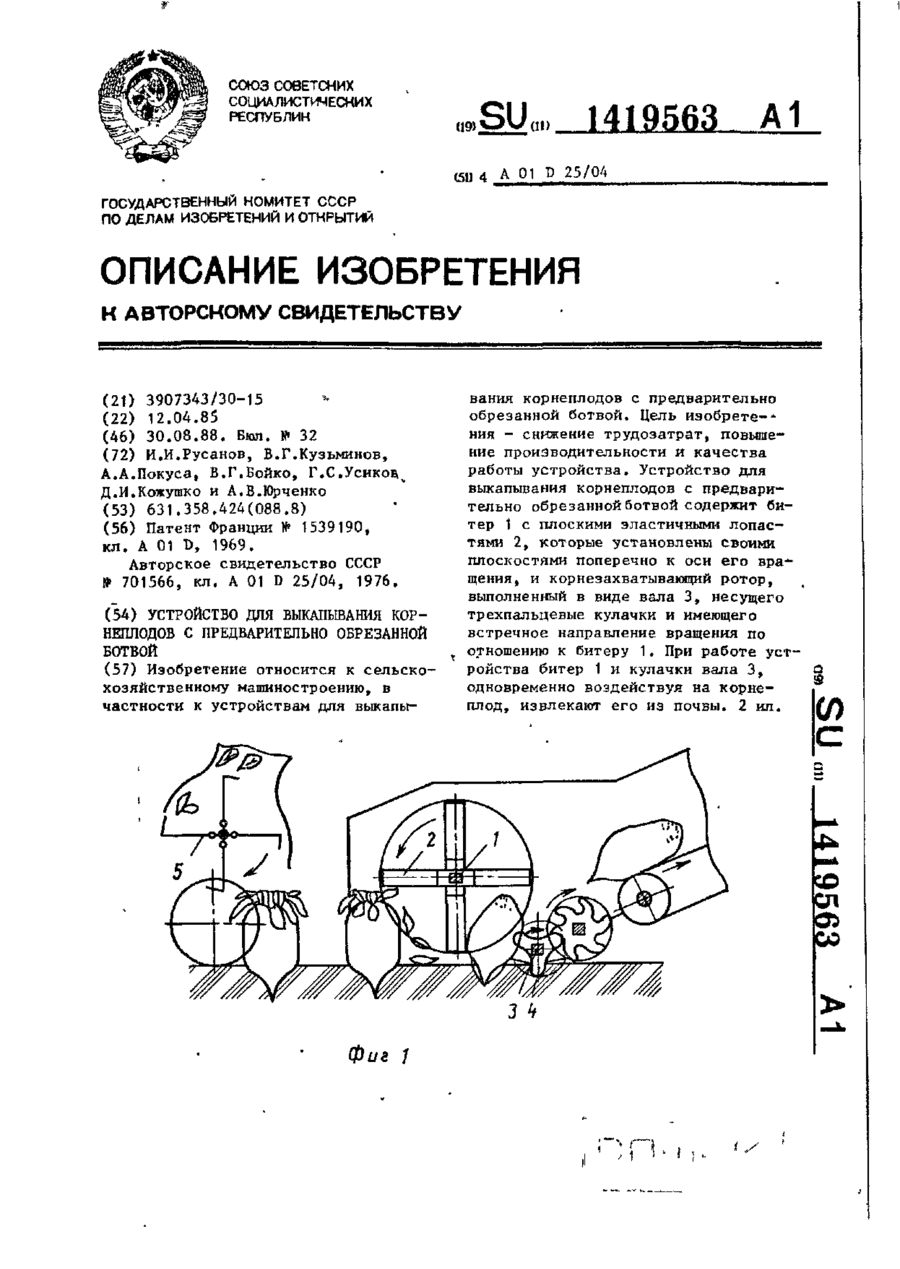
Устройство для выкапывания корнеплодов с предварительно обрезанной ботвой, содержащее битер с эластичными плоскими лопастями и размещенный за ним корнезахватывающий ротор, который выполнен в виде вала, несущего рабочие элементы и имеющего встречное относительно битера направление вращения, при этом и ротор, и битер расположены поперечно к направлению рабочего движения устройства, отличающееся тем, что, с целью снижения трудозатрат,...
Попередній патент: Трубоукладач, короб та накопичувальний пристрій трубоукладача
Наступний патент: Спосіб об`ємного пожежогасіння вогнегасними сумішами
Випадковий патент: Колоїдний розчин біомаси водорості "dunaliella salina"