Відмовостійка система керування боковим рухом безпілотного літального апарата
Номер патенту: 35088
Опубліковано: 26.08.2008
Автори: Амеліна Ірина Вікторівна, Бандура Іван Миколайович, Симонов Володимир Федорович

Формула / Реферат
Відмовостійка система керування боковим рухом безпілотного літального апарата, що містить перший датчик кутової швидкості рискання, перший та другий суматори, перший та другий підсилювачі, привід керма напрямку, датчик положення керма напрямку, перший датчик кутової швидкості крену, привід елеронів, обчислювач значень кута крену, перший, другий датчики тиску, датчик положення елеронів, блок віднімання, формувач значень сигналу кута ковзання, радіоприймач, датчик швидкості польоту, яка відрізняється тим, що до її складу введені другий датчик кутової швидкості крену, вихід якого з’єднаний з першим входом другого порівнюючого пристрою, другим входом першого порівнюючого пристрою та другим входом першого мультиплексора, перший порівнюючий пристрій, перший вхід якого з’єднаний з виходом першого датчика кутової швидкості крену та першим входом першого мультиплексора, а вихід - з першим входом першого логічного пристрою, третій датчик кутової швидкості крену, вихід якого з’єднаний з другим входом другого порівнюючого пристрою та третім входом першого мультиплексора, другий порівнюючий пристрій, вихід якого з’єднаний з другим входом першого логічного пристрою, перший логічний пристрій, вихід якого з’єднаний з керуючим входом першого мультиплексора, вихід якого з’єднаний з першим входом другого суматора та першим входом обчислювача, другий датчик кутової швидкості рискання, вихід якого з’єднаний з першим входом четвертого порівнюючого пристрою, другим входом третього порівнюючого пристрою та другим входом другого мультиплексора, третій порівнюючий пристрій, перший вхід якого з’єднаний з виходом першого датчика кутової швидкості рискання та першим входом другого мультиплексора, а вихід - з першим входом другого логічного пристрою, третій датчик кутової швидкості рискання, вихід якого з’єднаний з другим входом четвертого порівнюючого пристрою та третім входом другого мультиплексора, четвертий порівнюючий пристрій, вихід якого з’єднаний з другим входом другого логічного пристрою, другий логічний пристрій, вихід якого з’єднаний з керуючим входом другого мультиплексора, вихід якого з’єднаний з першим входом першого суматора та другим входом обчислювача.
Текст
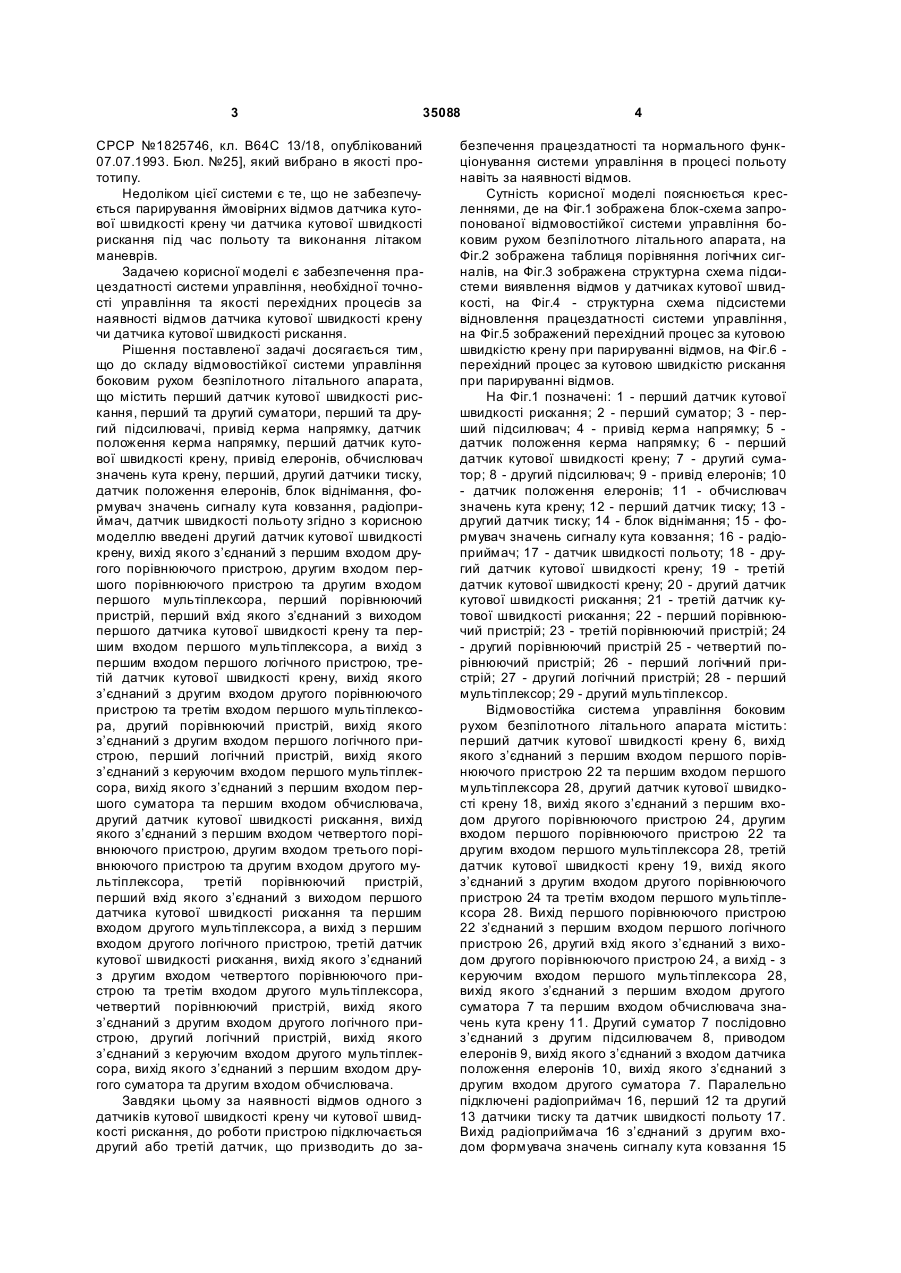
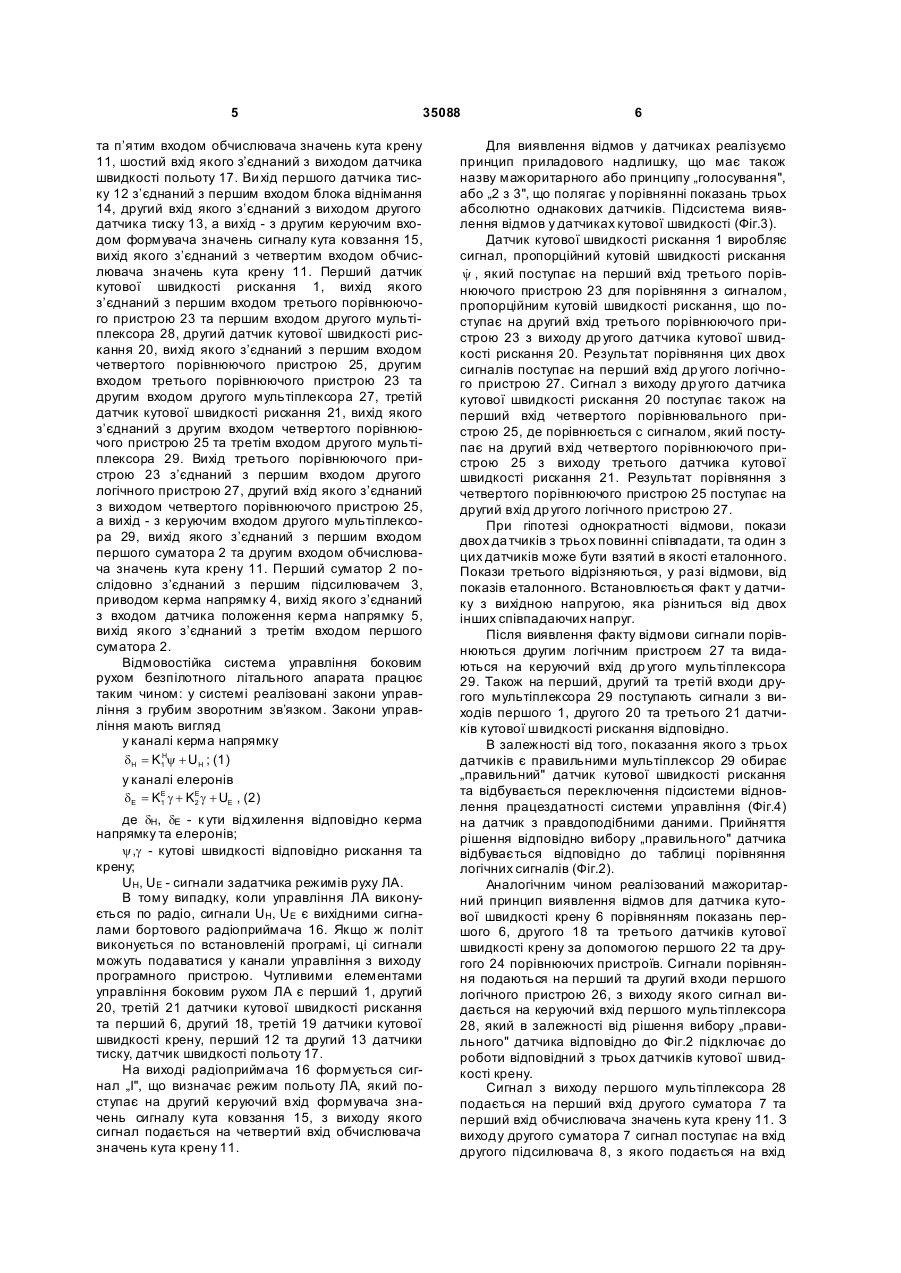
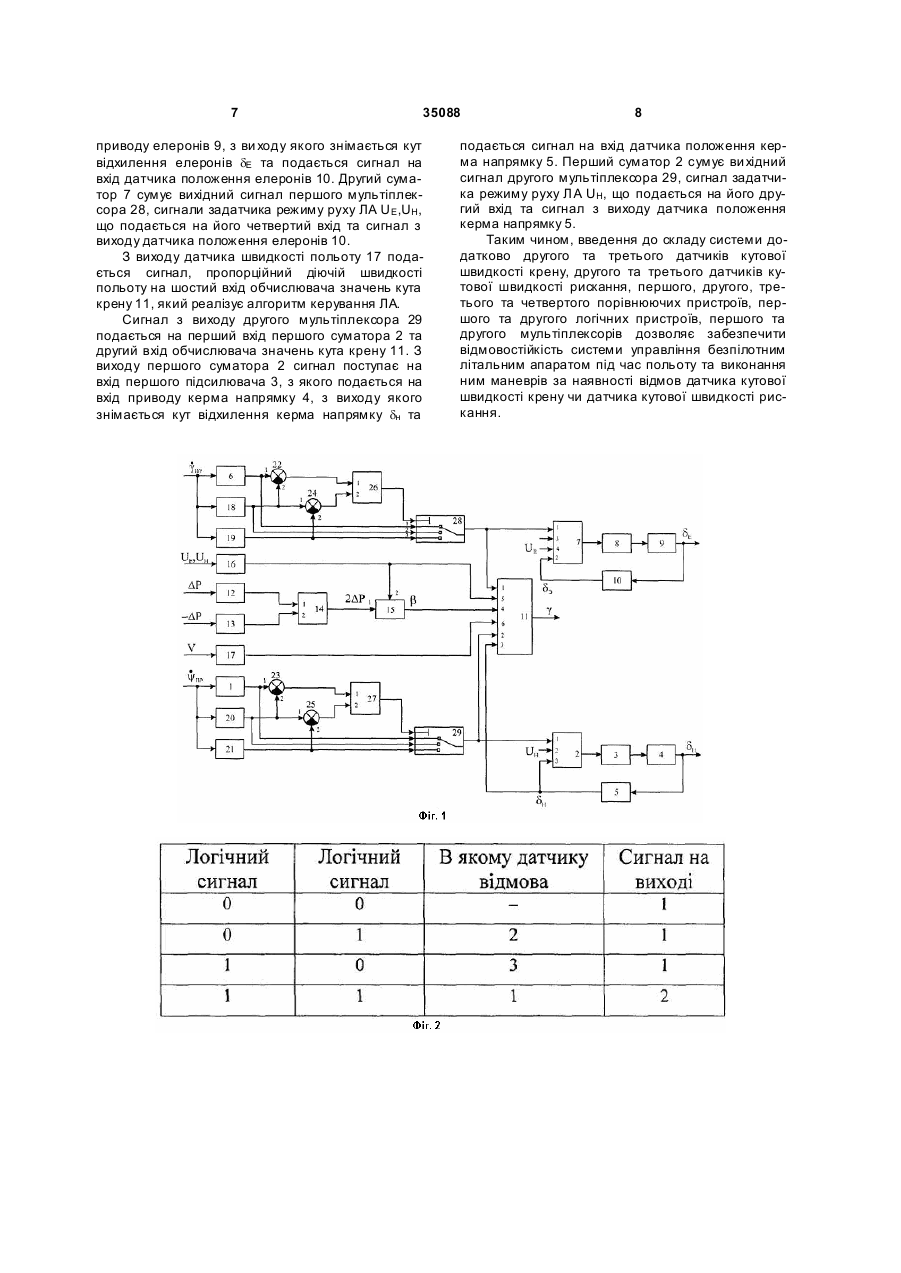
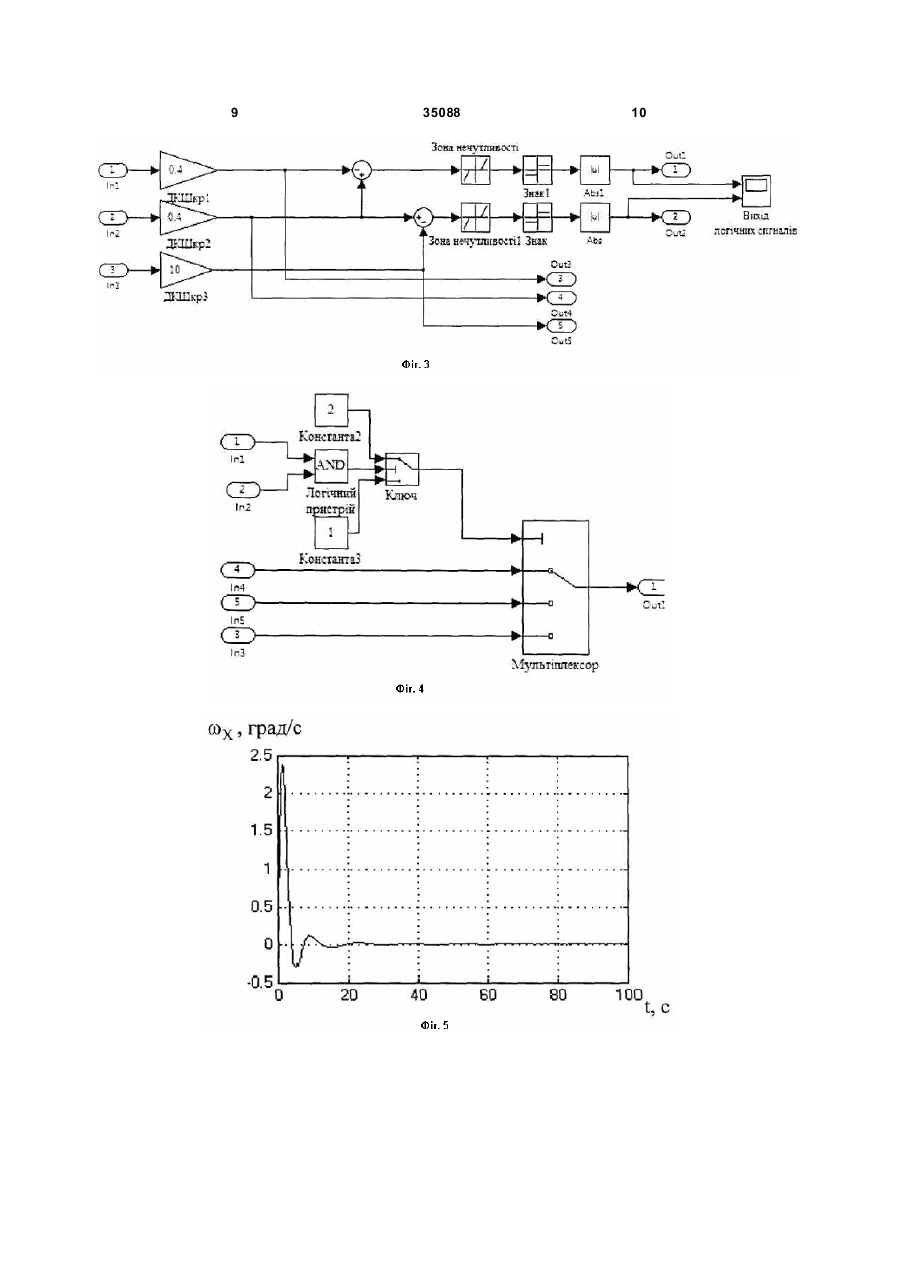
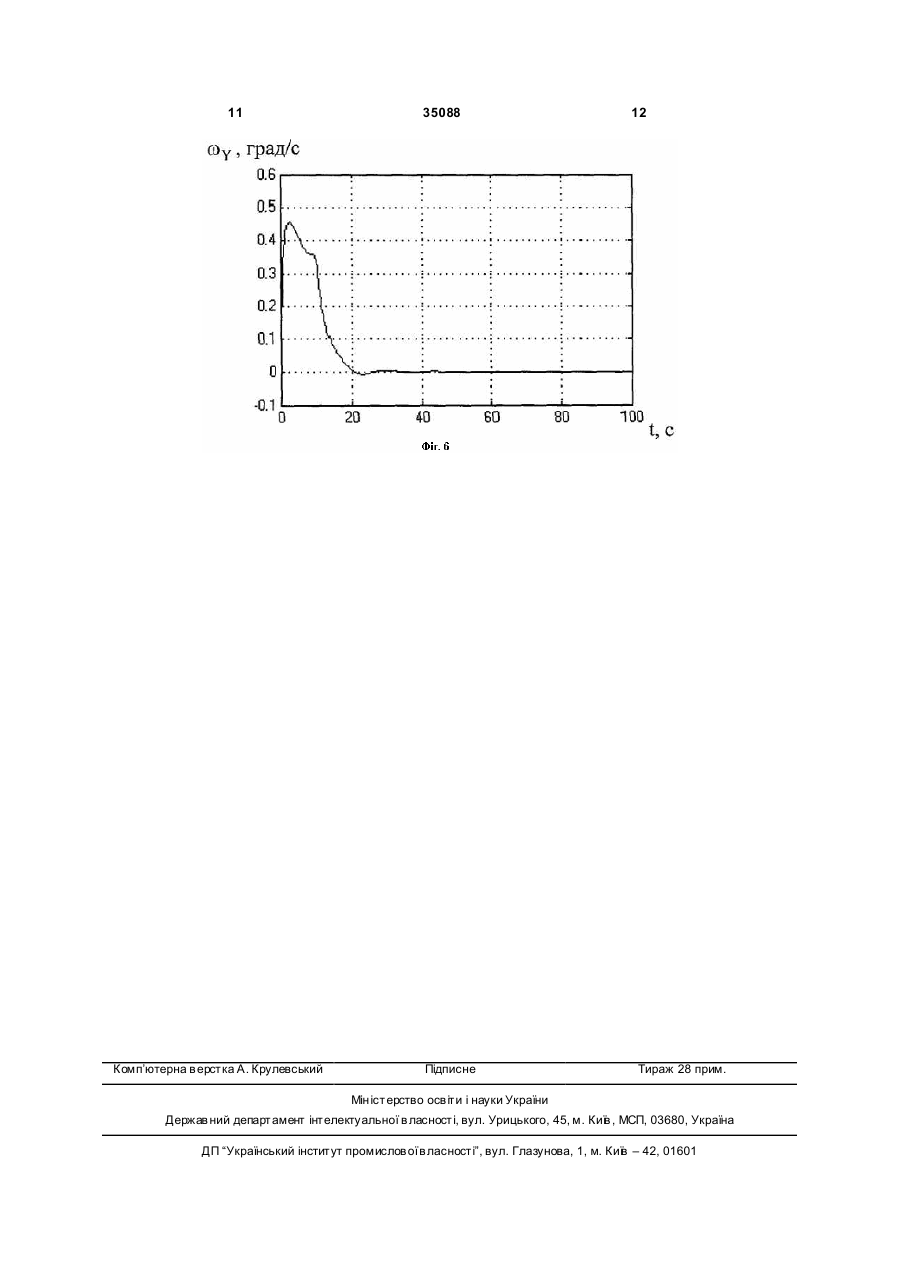
Відмовостійка система керування боковим рухом безпілотного літального апарата, що містить перший датчик кутової швидкості рискання, перший та другий суматори, перший та другий підсилювачі, привід керма напрямку, датчик положення керма напрямку, перший датчик кутової швидкості крену, привід елеронів, обчислювач значень кута крену, перший, другий датчики тиску, датчик положення елеронів, блок віднімання, формувач значень сигналу кута ковзання, радіоприймач, датчик швидкості польоту, яка відрізняється тим, що до її складу введені другий датчик кутової швидкості крену, ви хід якого з’єднаний з першим входом другого порівнюючого пристрою, другим входом першого порівнюючого пристрою та другим входом першого мультиплексора, перший порівнюючий пристрій, перший вхід якого з’єднаний з виходом першого датчика кутової швидкості крену та першим входом першого муль U 2 35088 1 3 35088 СРСР №1825746, кл. В64С 13/18, опублікований 07.07.1993. Бюл. №25], який вибрано в якості прототипу. Недоліком цієї системи є те, що не забезпечується парирування ймовірних відмов датчика кутової швидкості крену чи датчика кутової швидкості рискання під час польоту та виконання літаком маневрів. Задачею корисної моделі є забезпечення працездатності системи управління, необхідної точності управління та якості перехідних процесів за наявності відмов датчика кутової швидкості крену чи датчика кутової швидкості рискання. Рішення поставленої задачі досягається тим, що до складу відмовостійкої системи управління боковим рухом безпілотного літального апарата, що містить перший датчик кутової швидкості рискання, перший та другий суматори, перший та другий підсилювачі, привід керма напрямку, датчик положення керма напрямку, перший датчик кутової швидкості крену, привід елеронів, обчислювач значень кута крену, перший, другий датчики тиску, датчик положення елеронів, блок віднімання, формувач значень сигналу кута ковзання, радіоприймач, датчик швидкості польоту згідно з корисною моделлю введені другий датчик кутової швидкості крену, вихід якого з’єднаний з першим входом другого порівнюючого пристрою, другим входом першого порівнюючого пристрою та другим входом першого мультіплексора, перший порівнюючий пристрій, перший вхід якого з’єднаний з виходом першого датчика кутової швидкості крену та першим входом першого мультіплексора, а вихід з першим входом першого логічного пристрою, третій датчик кутової швидкості крену, вихід якого з’єднаний з другим входом другого порівнюючого пристрою та третім входом першого мультіплексора, другий порівнюючий пристрій, вихід якого з’єднаний з другим входом першого логічного пристрою, перший логічний пристрій, вихід якого з’єднаний з керуючим входом першого мультіплексора, вихід якого з’єднаний з першим входом першого суматора та першим входом обчислювача, другий датчик кутової швидкості рискання, вихід якого з’єднаний з першим входом четвертого порівнюючого пристрою, другим входом третього порівнюючого пристрою та другим входом другого мультіплексора, третій порівнюючий пристрій, перший вхід якого з’єднаний з виходом першого датчика кутової швидкості рискання та першим входом другого мультіплексора, а вихід з першим входом другого логічного пристрою, третій датчик кутової швидкості рискання, вихід якого з’єднаний з другим входом четвертого порівнюючого пристрою та третім входом другого мультіплексора, четвертий порівнюючий пристрій, вихід якого з’єднаний з другим входом другого логічного пристрою, другий логічний пристрій, вихід якого з’єднаний з керуючим входом другого мультіплексора, вихід якого з’єднаний з першим входом другого суматора та другим входом обчислювача. Завдяки цьому за наявності відмов одного з датчиків кутової швидкості крену чи кутової швидкості рискання, до роботи пристрою підключається другий або третій датчик, що призводить до за 4 безпечення працездатності та нормального функціонування системи управління в процесі польоту навіть за наявності відмов. Сутність корисної моделі пояснюється кресленнями, де на Фіг.1 зображена блок-схема запропонованої відмовостійкої системи управління боковим рухом безпілотного літального апарата, на Фіг.2 зображена таблиця порівняння логічних сигналів, на Фіг.3 зображена структурна схема підсистеми виявлення відмов у датчиках кутової швидкості, на Фіг.4 - структурна схема підсистеми відновлення працездатності системи управління, на Фіг.5 зображений перехідний процес за кутовою швидкістю крену при парируванні відмов, на Фіг.6 перехідний процес за кутовою швидкістю рискання при парируванні відмов. На Фіг.1 позначені: 1 - перший датчик кутової швидкості рискання; 2 - перший суматор; 3 - перший підсилювач; 4 - привід керма напрямку; 5 датчик положення керма напрямку; 6 - перший датчик кутової швидкості крену; 7 - другий суматор; 8 - другий підсилювач; 9 - привід елеронів; 10 - датчик положення елеронів; 11 - обчислювач значень кута крену; 12 - перший датчик тиску; 13 другий датчик тиску; 14 - блок віднімання; 15 - формувач значень сигналу кута ковзання; 16 - радіоприймач; 17 - датчик швидкості польоту; 18 - другий датчик кутової швидкості крену; 19 - третій датчик кутової швидкості крену; 20 - другий датчик кутової швидкості рискання; 21 - третій датчик кутової швидкості рискання; 22 - перший порівнюючий пристрій; 23 - третій порівнюючий пристрій; 24 - другий порівнюючий пристрій 25 - четвертий порівнюючий пристрій; 26 - перший логічний пристрій; 27 - другий логічний пристрій; 28 - перший мультіплексор; 29 - другий мультіплексор. Відмовостійка система управління боковим рухом безпілотного літального апарата містить: перший датчик кутової швидкості крену 6, вихід якого з’єднаний з першим входом першого порівнюючого пристрою 22 та першим входом першого мультіплексора 28, другий датчик кутової швидкості крену 18, вихід якого з’єднаний з першим входом другого порівнюючого пристрою 24, другим входом першого порівнюючого пристрою 22 та другим входом першого мультіплексора 28, третій датчик кутової швидкості крену 19, вихід якого з’єднаний з другим входом другого порівнюючого пристрою 24 та третім входом першого мультіплексора 28. Вихід першого порівнюючого пристрою 22 з’єднаний з першим входом першого логічного пристрою 26, другий вхід якого з’єднаний з виходом другого порівнюючого пристрою 24, а вихід - з керуючим входом першого мультіплексора 28, вихід якого з’єднаний з першим входом другого суматора 7 та першим входом обчислювача значень кута крену 11. Другий суматор 7 послідовно з’єднаний з другим підсилювачем 8, приводом елеронів 9, вихід якого з’єднаний з входом датчика положення елеронів 10, вихід якого з’єднаний з другим входом другого суматора 7. Паралельно підключені радіоприймач 16, перший 12 та другий 13 датчики тиску та датчик швидкості польоту 17. Вихід радіоприймача 16 з’єднаний з другим входом формувача значень сигналу кута ковзання 15 5 35088 та п’ятим входом обчислювача значень кута крену 11, шостий вхід якого з’єднаний з виходом датчика швидкості польоту 17. Ви хід першого датчика тиску 12 з’єднаний з першим входом блока віднімання 14, другий вхід якого з’єднаний з виходом другого датчика тиску 13, а вихід - з другим керуючим входом формувача значень сигналу кута ковзання 15, вихід якого з’єднаний з четвертим входом обчислювача значень кута крену 11. Перший датчик кутової швидкості рискання 1, вихід якого з’єднаний з першим входом третього порівнюючого пристрою 23 та першим входом другого мультіплексора 28, другий датчик кутової швидкості рискання 20, вихід якого з’єднаний з першим входом четвертого порівнюючого пристрою 25, другим входом третього порівнюючого пристрою 23 та другим входом другого мультіплексора 27, третій датчик кутової швидкості рискання 21, вихід якого з’єднаний з другим входом четвертого порівнюючого пристрою 25 та третім входом другого мультіплексора 29. Вихід третього порівнюючого пристрою 23 з’єднаний з першим входом другого логічного пристрою 27, другий вхід якого з’єднаний з виходом четвертого порівнюючого пристрою 25, а вихід - з керуючим входом другого мультіплексора 29, вихід якого з’єднаний з першим входом першого суматора 2 та другим входом обчислювача значень кута крену 11. Перший суматор 2 послідовно з’єднаний з першим підсилювачем 3, приводом керма напрямку 4, вихід якого з’єднаний з входом датчика положення керма напрямку 5, вихід якого з’єднаний з третім входом першого суматора 2. Відмовостійка система управління боковим рухом безпілотного літального апарата працює таким чином: у системі реалізовані закони управління з грубим зворотним зв’язком. Закони управління мають вигляд у каналі керма напрямку H dH = K1 y + UH ; (1) у каналі елеронів dE = KE g + KE g + UE , (2) 1 2 де dH, dЕ - к ути відхилення відповідно керма напрямку та елеронів; y,g - кутові швидкості відповідно рискання та крену; UH, UЕ - сигнали задатчика режимів руху ЛА. В тому випадку, коли управління ЛА виконується по радіо, сигнали UН, UЕ є вихідними сигналами бортового радіоприймача 16. Якщо ж політ виконується по встановленій програмі, ці сигнали можуть подаватися у канали управління з виходу програмного пристрою. Чутливими елементами управління боковим рухом ЛА є перший 1, другий 20, третій 21 датчики кутової швидкості рискання та перший 6, другий 18, третій 19 датчики кутової швидкості крену, перший 12 та другий 13 датчики тиску, датчик швидкості польоту 17. На виході радіоприймача 16 формується сигнал „І", що визначає режим польоту ЛА, який поступає на другий керуючий вхід формувача значень сигналу кута ковзання 15, з виходу якого сигнал подається на четвертий вхід обчислювача значень кута крену 11. 6 Для виявлення відмов у датчиках реалізуємо принцип приладового надлишку, що має також назву мажоритарного або принципу „голосування", або „2 з 3", що полягає у порівнянні показань трьох абсолютно однакових датчиків. Підсистема виявлення відмов у датчиках кутової швидкості (Фіг.3). Датчик кутової швидкості рискання 1 виробляє сигнал, пропорційний кутовій швидкості рискання & y , який поступає на перший вхід третього порівнюючого пристрою 23 для порівняння з сигналом, пропорційним кутовій швидкості рискання, що поступає на другий вхід третього порівнюючого пристрою 23 з виходу др угого датчика кутової швидкості рискання 20. Результат порівняння цих двох сигналів поступає на перший вхід др угого логічного пристрою 27. Сигнал з виходу др уго го датчика кутової швидкості рискання 20 поступає також на перший вхід четвертого порівнювального пристрою 25, де порівнюється с сигналом, який поступає на другий вхід четвертого порівнюючого пристрою 25 з виходу третього датчика кутової швидкості рискання 21. Результат порівняння з четвертого порівнюючого пристрою 25 поступає на другий вхід др угого логічного пристрою 27. При гіпотезі однократності відмови, покази двох да тчиків з трьох повинні співпадати, та один з цих датчиків може бути взятий в якості еталонного. Покази третього відрізняються, у разі відмови, від показів еталонного. Встановлюється факт у датчику з вихідною напругою, яка різниться від двох інших співпадаючих напруг. Після виявлення факту відмови сигнали порівнюються другим логічним пристроєм 27 та видаються на керуючий вхід др угого мультіплексора 29. Також на перший, другий та третій входи другого мультіплексора 29 поступають сигнали з виходів першого 1, другого 20 та третього 21 датчиків кутової швидкості рискання відповідно. В залежності від того, показання якого з трьох датчиків є правильними мультіплексор 29 обирає „правильний" датчик кутової швидкості рискання та відбувається переключення підсистеми відновлення працездатності системи управління (Фіг.4) на датчик з правдоподібними даними. Прийняття рішення відповідно вибору „правильного" датчика відбувається відповідно до таблиці порівняння логічних сигналів (Фіг.2). Аналогічним чином реалізований мажоритарний принцип виявлення відмов для датчика кутової швидкості крену 6 порівнянням показань першого 6, другого 18 та третього датчиків кутової швидкості крену за допомогою першого 22 та другого 24 порівнюючих пристроїв. Сигнали порівняння подаються на перший та другий входи першого логічного пристрою 26, з виходу якого сигнал видається на керуючий вхід першого мультіплексора 28, який в залежності від рішення вибору „правильного" датчика відповідно до Фіг.2 підключає до роботи відповідний з трьох датчиків кутової швидкості крену. Сигнал з виходу першого мультіплексора 28 подається на перший вхід другого суматора 7 та перший вхід обчислювача значень кута крену 11. З виходу другого суматора 7 сигнал поступає на вхід другого підсилювача 8, з якого подається на вхід 7 35088 приводу елеронів 9, з ви ходу якого знімається кут відхилення елеронів dЕ та подається сигнал на вхід датчика положення елеронів 10. Другий суматор 7 сумує вихідний сигнал першого мультіплексора 28, сигнали задатчика режиму руху ЛА U E ,UH, що подається на його четвертий вхід та сигнал з виходу датчика положення елеронів 10. З виходу датчика швидкості польоту 17 подається сигнал, пропорційний діючій швидкості польоту на шостий вхід обчислювача значень кута крену 11, який реалізує алгоритм керування ЛА. Сигнал з виходу другого мультіплексора 29 подається на перший вхід першого суматора 2 та другий вхід обчислювача значень кута крену 11. З виходу першого суматора 2 сигнал поступає на вхід першого підсилювача 3, з якого подається на вхід приводу керма напрямку 4, з виходу якого знімається кут відхилення керма напрямку dн та 8 подається сигнал на вхід датчика положення керма напрямку 5. Перший суматор 2 сумує ви хідний сигнал другого мультіплексора 29, сигнал задатчика режиму руху ЛА UH, що подається на його другий вхід та сигнал з виходу датчика положення керма напрямку 5. Таким чином, введення до складу системи додатково другого та третього датчиків кутової швидкості крену, другого та третього датчиків кутової швидкості рискання, першого, другого, третього та четвертого порівнюючих пристроїв, першого та другого логічних пристроїв, першого та другого мультіплексорів дозволяє забезпечити відмовостійкість системи управління безпілотним літальним апаратом під час польоту та виконання ним маневрів за наявності відмов датчика кутової швидкості крену чи датчика кутової швидкості рискання. 9 35088 10 11 Комп’ютерна в ерстка А. Крулевський 35088 Підписне 12 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюFault-tolerant system of lateral guidance of unmanned aircraft
Автори англійськоюSymonov Volodymyr Fedorovych, Bandura Ivan Mykolaiovych, Amelina Iryna Viktorivna
Назва патенту російськоюОтказоустойчивая система управления боковым движением беспилотного летательного аппарата
Автори російськоюСимонов Владимир Федорович, Бандура Иван Николаевич, Амелина Ирина Викторовна
МПК / Мітки
МПК: G05D 1/03, B64C 13/00
Мітки: безпілотного, боковим, керування, літального, рухом, відмовостійка, апарата, система
Код посилання
<a href="https://ua.patents.su/6-35088-vidmovostijjka-sistema-keruvannya-bokovim-rukhom-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Відмовостійка система керування боковим рухом безпілотного літального апарата</a>
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Величко Надія Вікторівна, Симонов Володимир Федорович, Бандура Іван Миколайович
МПК: B64C 13/00, G05D 1/03
Мітки: система, апарата, безпілотного, літального, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Симонов Володимир Федорович, Паніна Алла Володимирівна, Литвиненко Денис Володимирович
МПК: G05D 1/03
Мітки: літального, безпілотного, апарата, стабілізації, система
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Антошик Вікторія Миколаївна, Симонов Володимир Федорович, Амелін Сергій Вікторович, Бандура Іван Миколайович
МПК: G05D 1/03, B64C 13/00
Мітки: стабілізації, безпілотного, літального, апарата, система
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Пристрій для кутової стабілізації безпілотного літального апарата

Номер патенту: 29176
Опубліковано: 10.01.2008
Автори: Симонов Володимир Федорович, Амеліна Ірина Вікторівна, Субота Анатолій Максимович
МПК: B64C 13/00, G05D 1/03
Мітки: безпілотного, літального, пристрій, кутової, апарата, стабілізації
Формула / Реферат:
Пристрій для кутової стабілізації безпілотного літального апарата, що містить датчик відхилення кутового положення літального апарата від програмного значення, перетворювач аналог-код, форсуючу ланку, перший перетворювач код-аналог, рульовий привід органів керування, перший, другий, третій та четвертий блоки інтегрування, перший, другий та третій інвертори, перший і другий блоки виділення знака сигналу, блок визначення функції зсуву та...
Система демпфірування кутових швидкостей космічного літального апарата

Номер патенту: 26160
Опубліковано: 10.09.2007
Автори: Бандура Іван Миколайович, Колесников Геннадій Викторович
МПК: B64G 1/24
Мітки: система, літального, апарата, демпфірування, швидкостей, космічного, кутових
Формула / Реферат:
Система демпфірування кутових швидкостей космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, між...
Попередній патент: Система стабілізації кутового руху космічного апарата
Наступний патент: Безплатформний інерціальний блок
Випадковий патент: Вітряний двигун