Компенсаційний акселерометр з оптичним датчиком кута
Номер патенту: 75628
Опубліковано: 10.12.2012
Автори: Мануйленко Віталій Михайлович, Скрипковський Геннадій Олексійович, Новиченко Анатолій Васильович, Черняк Миколай Григорович, Ващенко Валерий Миколайович, Роздрогин Евген Рамільович, Баталін Олександр Сергійович
Формула / Реферат
1. Компенсаційний акселерометр з оптичним датчиком кута, що містить корпус з базовою установочною поверхнею, з розташованими в ньому чутливим елементом у вигляді маятника, що складається з інерційної маси, яка утворена рухомою пластиною, пружно прикріпленою до основи чутливого елемента, котушкою, встановленою на рухомій пластині, та екрануючим елементом, сполученого з рухомою пластиною, зі щілиною, спрямованою уздовж осі маятника, датчиком кута, який складається з джерела світла і диференціального приймача світла, розташованих один проти одного з розміщенням екрануючого елемента між ними, датчиком моменту, струмопідводів до котушки маятника, електричною системою та кожухом, герметично зв'язаним з корпусом, який відрізняється тим, що датчик моменту включає в себе верхню та нижню магнітні системи, що складаються із зовнішніх і внутрішніх магнітопроводів, постійних кільцеподібних магнітів, діаметрально намагнічених уздовж осі маятника, і двох котушок, встановлених на рухомій пластині маятника.
2. Компенсаційний акселерометр з оптичним датчиком кута за п. 1, який відрізняється тим, що рух маятника вздовж вимірювальної осі акселерометра обмежений зверху і знизу обмежувачами його переміщення.
3. Компенсаційний акселерометр з оптичним датчиком кута за п. 1, який відрізняється тим, що джерело світла та приймач світла встановлені на корпусі нерухомо, а настройка нульового сигналу датчика кута акселерометра виконується електричним способом.
4. Компенсаційний акселерометр з оптичним датчиком кута за п. 1, який відрізняється тим, що основа чутливого елемента встановлена на платики корпусу та притиснута до корпусу пружинною шайбою.
5. Компенсаційний акселерометр з оптичним датчиком кута за п. 1, який відрізняється тим, що плата електроніки електричної системи відокремлена від магнітних систем і оптичного датчика кута тепловим екраном.
6. Компенсаційний акселерометр з оптичним датчиком кута за п. 1, який відрізняється тим, що струмопідводи до котушок маятника мають форму, що забезпечує кутову симетрію навколо вихідної осі акселерометра, яка є віссю підвісу рухомої пластини чутливого елемента.
Текст
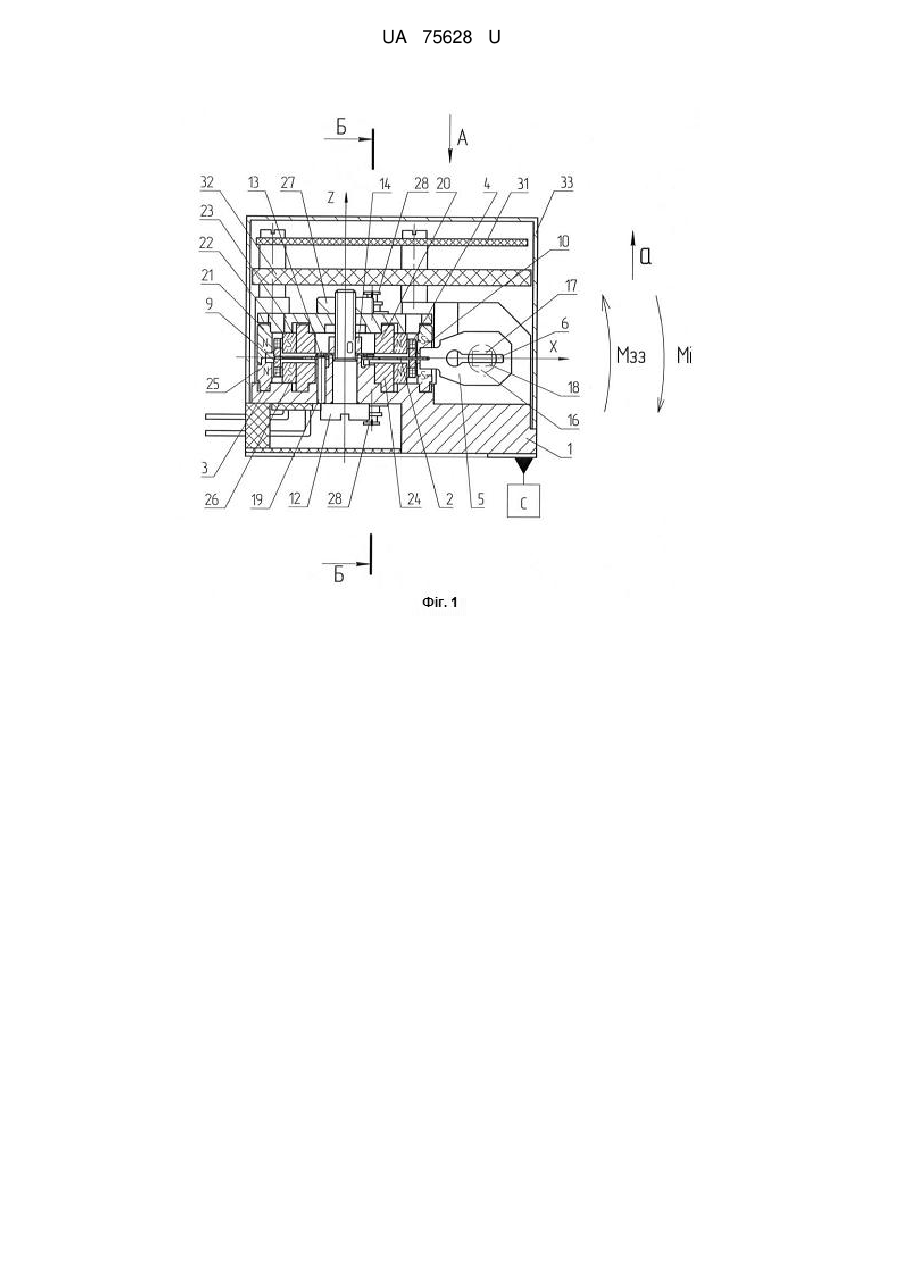
Реферат: Компенсаційний акселерометр з оптичним датчиком кута містить корпус з базовою установочною поверхнею, з розташованими в ньому чутливим елементом у вигляді маятника, що складається з інерційної маси, яка утворена рухомою пластиною, пружно прикріпленою до основи чутливого елемента, котушкою, встановленою на рухомій пластині, та екрануючим елементом, сполученого з рухомою пластиною, зі щілиною, спрямованою уздовж осі маятника, датчиком кута, який складається з джерела світла і диференціального приймача світла, розташованих один проти одного з розміщенням екрануючого елемента між ними, датчиком моменту, струмопідводів до котушки маятника, електричною системою та кожухом, герметично зв'язаним з корпусом. Датчик моменту включає в себе верхню та нижню магнітні системи, що складаються із зовнішніх і внутрішніх магнітопроводів, постійних кільцеподібних магнітів, діаметрально намагнічених уздовж осі маятника, і двох котушок, встановлених на рухомій пластині маятника. UA 75628 U (12) UA 75628 U UA 75628 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі приладобудування, зокрема - до компенсаційних маятникових лінійних акселерометрів (далі по тексту АК) з пружним підвісом (далі по тексту ПП) чутливого елемента (далі по тексту ЧЕ), і може використовуватися при вимірюванні прискорення рухомих об'єктів. Відомий АК, узятий за аналог, описаний в патенті США № 4,649,748 від 17 березня 1987р. Акселерометр включає в себе інерційну масу (далі по тексту IМ), виконану у вигляді маятника (далі по тексту маятник), поміщену в герметичний корпус із створеним в ньому вакуумом або заповненим інертним газом (наприклад гелієм). Маятник виконаний у вигляді рухомого стержня, нижня частина якого зв'язана за допомогою ПП з пластиною, прикріпленою гвинтами до базової площини основи. Стержень може повертатися на ПП навколо пластини в напрямку вимірювальної осі (далі по тексту ВО) АК. До стержня маятника прикріплено дві рухомі котушки циліндричної форми. Аксіальні магнітні системи (далі по тексту МС) АК включають в себе магнітопроводи, роль яких виконують жорстко з'єднані між собою основа і рамка, виготовлені з магнітом'якого матеріалу, а також постійні магніти і полюсні наконечники, при цьому рухливі котушки знаходяться у відповідних зазорах, утворених поверхнями магнітопроводів і полюсних наконечників. Перераховані елементи разом з рухомими котушками формують датчик моменту (далі по тексту ДМ) АК. У корпусі, з метою вимірювання переміщення маятника, встановлено датчик кута (далі по тексту ДК), який складається з одного джерела світла і двох приймачів світла, які, для забезпечення механічної установки нульового сигналу ДК, притиснуті до основи і рамки за допомогою плоскої пружини. Вільний кінець стержня маятника, розташований між джерелом світла і двома приймачами світла, виконано у вигляді тонкої пластини. В одному з варіантів АК тонка пластина перекриває частину світлового потоку від джерела світла до приймачів світла. В іншому варіанті АК тонка пластина виконана з розрізом уздовж осі стержня маятника, який пропускає частину світлового потоку. За відсутності вимірюваного прискорення вздовж ВО маятник знаходиться в нейтральному положенні, при якому частина світлового потоку, що випромінюється джерелом світла, екранується поверхнею нерухомого маятника і не потрапляє в приймачі світла, а частина - ділиться рівномірно між приймачами світла, забезпечуючи рівні величини потоків, що потрапляють на обидва приймача світла. При цьому світлоприймальні поверхні освітлюються світловими потоками не повністю, але однаково, що виключає можливість виникнення напруги в електричній системі АК. При дії прискорення об'єкта вздовж ВО виникає момент сили інерції, який відхиляє маятник від його нейтрального положення. В результаті цього відбувається перерозподіл світлового потоку, що потрапляє від джерела світла на приймачі світла: на один з приймачів потрапляє більший світловий потік, ніж на другий приймач. Відмінність величин світлових потоків, що потрапляють на світлоприймальні поверхні приймачів світла, призводить до виникнення напруги в електричній системі АК. При цьому виникає електричний сигнал, пропорційний зміщенню маятника, і отже, прискоренню об'єкта. Далі цей сигнал перетворюється в струм зворотного зв'язку, що протікає через котушки ДМ і взаємодіє з полями постійних магнітів, в результаті чого виникає сила зворотного зв'язку. Момент цієї сили, що діє навколо осі ПП, врівноважує момент сили інерції вимірюваного прискорення і повертає маятник у нейтральне положення. Величина і напрям струму зворотного зв'язку дозволяють вимірювати величину і напрямок прискорення. Недоліками аналога, що розглядається, є: 1) наявність ДМ з двома аксіальними МС. При необхідності збільшення діапазону вимірювання АК з таким ДМ потрібно збільшувати струм зворотного зв'язку, який протікає по котушках маятника (оскільки збільшення довжини дроту в котушках не дозволяє збільшувати діапазон вимірювання у зв'язку з пропорційним зростанням інерційної маси маятника) при максимальному вимірюваному прискоренні, а це призводить до збільшення температурної похибки коефіцієнта перетворення (далі по тексту КП) АК внаслідок збільшення електричної потужності, яка розсіюється в котушках і нагріває магніти МС; 2) конструкція ДК забезпечує невисоку точність механічної настройки його нульового сигналу; 3) малий діапазон переміщення джерела світла і приймачів світла відносно нерухомої основи (корпусу) АК не дозволяє виконати механічну настройку нульового сигналу ДК в тих випадках, коли має місце великий кут між віссю стержня маятника в нейтральному положенні і базовою установочною площиною АК. Відомий АК, описаний в патенті US 7,406,868 від 05.08.2008г., прийнятий за прототип. В компенсаційному АК з оптичним ДК, що містить корпус з базовою установочною поверхнею, з розташованими в ньому ЧЕ у вигляді маятника, який виконаний як екрануючий елемент із щілиною, датчиком кута, який складається з джерела світла і диференціального приймача світла, розташованих один проти одного з розміщенням екрануючого елемента між ними, 1 UA 75628 U 5 10 15 20 25 30 35 40 45 50 55 60 датчиком моменту, який включає в себе одну магнітну систему і рухому котушку, встановлену на маятнику, електричною системою і кожухом, герметично зв'язаним з корпусом, новим, по відношенню до раніше розглянутого аналогу, є те, що: 1) датчик моменту складається з однієї МС, встановленої на циліндричному виступі верхньої частини корпусу, яка складається із зовнішнього, внутрішнього магнітопроводів і кільцевого магніту, який має діаметральну намагніченість вздовж осі маятника АК, причому вісь підвісу маятника лежить в нейтральній площині магніту, і котушки, встановленої на рухомій пластині маятника, яка розміщена в зазорі, утвореному зовнішньою поверхнею магніту і внутрішньою поверхнею зовнішнього магнітопровода. Використання діаметрально намагніченої МС у порівнянні з аксіальною МС дозволяє, в разі збільшення діапазону вимірювання АК, збільшувати кількість витків котушки МС без збільшення маятниковості IМ маятника АК (при цьому під маятниковістю IМ маятника АК треба розуміти добуток маси IМ на координату її центра мас уздовж осі маятника від осі ПП) і без збільшення струму в котушці ДМ, що дозволяє уникнути збільшення температурної похибки КП АК внаслідок не зростання електричної потужності, яка розсіюється в котушці і нагріває магніт МС; 2) джерело світла і диференційний приймач світла нерухомо встановлені на рухомій вилці. У нижній частині корпусу виконано різьбовий отвір для установки в ньому упору з різьбою, що контактує з нижньою поверхнею рухомої вилки, на верхній поверхні якої з можливістю вибору люфтів встановлені, наприклад, пружини, що впираються в козирок, жорстко закріплений на корпусі. У корпусі виконані напрямні з можливістю поступального переміщення по них вилки в двох напрямках уздовж ВО АК. Використання рухомої вилки, упору з різьбою, пружин, які упираються в козирок, і направляючих в корпусі забезпечує точну механічну настройку нульового сигналу оптичного ДК та подальшу фіксацію вилки до корпусу з використанням, наприклад, гвинтів; 3) у корпусі для регулювання зазору між шторкою і приймачем світла виконано різьбовий отвір для установки в ньому фіксатора з ексцентриком в його верхній частині і з розташуванням ексцентрика в отворі нерухомої основи маятника; 4) в електричну схему АК для зменшення його температурних похибок шляхом стабілізації КП ДК введено додатковий ланцюг зворотного зв'язку, що складається з суматора, два інвертуючих входи якого пов'язані з виходами відповідних попередніх підсилювачів сигналів з диференціального приймача світла, причому неінвертуючий вхід суматора пов'язаний з джерелом опорної напруги UOП, а його вихід - з входом регулятора струму джерела світла. Дана конструкція АК має такі недоліки: 1) оскільки в АК використовується одна МС (нижня по відношенню до пластини ЧЕ) пластина ЧЕ з точки зору її конвективного теплообміну знаходиться зверхуі знизу в нерівних умовах, що може призвести до її температурної деформації у вертикальній площині АК, і, відповідно, до шкідливого переміщення екрануючого елемента ЧЕ вздовж ВО щодо пов'язаних з корпусом площадок диференціального приймача світла ДК, що викличе додаткову температурну похибку зміщення нуля АК; 2) механічне кріплення вилки ДК з джерелом світла і диференційним приймачем світла до корпусу АК при експлуатації протягом тривалого часу і при зміні температури може ослабнути, що призведе до шкідливого переміщення уздовж ВО вилки ДК, і відповідно площадок диференціального приймача світла відносно шторки, що викличе додаткову температурну і довготривалу похибку зміщення нульового сигналу АК; 3) притиснення основи ЧЕ до корпусу АК трипелюстковою пружинною, яка створює радіальне зусилля при її затиснені, призводить до того, що основа ЧЕ з глибоким розрізом уздовж осі маятника деформується. Ця деформація основи з глибоким розрізом призводить до виникнення механічної напруги в ПП. Довготривала або температурна релаксація цих напружень призведе до переміщення шторки ЧЕ вздовж ВО, що викличе додаткову довготривалу або температурну похибку зміщення нульового сигналу АК; 4) відсутність обмежувачів кутового переміщення ЧЕ АК може призвести до пластичної деформації ПП ЧЕ при ударних впливах на АК уздовж його ВО у вимкненому стані, а також у включеному стані, якщо амплітуда ударних впливів більша верхньої межі діапазону вимірювання; 5) шкідливий тепловий вплив плати електроніки електричної схеми, як основного внутрішнього джерела виділення тепла при роботі АК, на ЧЕ і оптичний ДК, призводить до додаткової температурної похибки зміщення нульового сигналу АК; 6) використання однієї котушки ДМ не дозволяє струмопідводам до неї надати форму, симетричну відносно вихідної осі АК, що не дозволяє взаємно компенсувати шкідливі пружні моменти двох деформованих струмопідводів, що діють навколо вихідної осі АК та прикладені до 2 UA 75628 U 5 10 15 20 25 30 35 40 45 50 55 60 рухомої пластині ЧЕ. В основу корисної моделі покладена задача удосконалення компенсаційного АК з оптичним ДК шляхом збільшення діапазону вимірювання АК без збільшення його температурних похибок, підвищення його стійкості до ударних впливів в умовах експлуатації у включеному і вимкненому стані, зменшення додаткових температурної похибки зміщення нуля і похибки від довготривалої нестабільності зміщення нуля. Поставлена задача вирішується таким чином. В компенсаційному акселерометрі з оптичним датчиком кута, що містить корпус з базовою установочною поверхнею, з розташованими в ньому чутливим елементом у вигляді маятника, що складається з інерційної маси, яка виконана у вигляді рухомої пластини, пружно прикріпленої до основи чутливого елемента, котушки, встановленої на рухомій пластині, і екрануючого елемента, сполученого з рухомою пластиною, із щілиною, спрямованою уздовж осі маятника, датчиком кута, який складається з джерела світла і диференціального приймача світла, розташованих один проти одного з розміщенням екрануючого елемента між ними, датчиком моменту, струмопідводів до котушки маятника, електричної схеми і кожуха, герметично зв'язаного з корпусом, новим є те, що: на рухомій пластині маятника зверху і знизу укріплено дві котушки ДМ, а в ДМ АК застосовано дві діаметрально намагнічені МС, у робочих зазорах яких розташовано котушки, укріплені на ЧЕ; всередині кожної МС встановлені регульовані обмежувачі кутового переміщення ЧЕ, виконані, наприклад, у вигляді гвинтів, що обмежують допустиме переміщення ЧЕ; джерело світла і диференційний приймач світла нерухомо встановлені на корпусі АК, наприклад, за допомогою зварного з єднання, а настройка нульового сигналу ДК проводиться електричним способом; основа ЧЕ пружно притиснута до платиків корпусу АК, наприклад, за допомогою плоскої трипелюсткової пружини, яка забезпечує вертикальне (вздовж ВО) прикладення зусилля притиснення основи пластини ЧЕ до платиків без її радіальних механічних деформацій і напружень; струмопідводи до котушок ДМ розташовані у вертикальній площині АК, а їх форма забезпечує кутову симетрію навколо вихідної осі ЧЕ; між корпусом з встановленими на ньому ЧЕ і оптичним ДК та платою електроніки електричної схеми встановлено теплозахисний екран. Запропонована конструкція АК дозволяє поліпшити його експлуатаційні та метрологічні характеристики і підвищити ефективність його роботи при встановлені на об'єкті - наприклад на транспортному засобі. Конструкціюзаявленого АК пояснюють такі креслення: на фіг. 1 показано поперечний розріз АК, виконаний вздовж BO OZ та осі маятника ОХ; на фіг. 2 зображено вид А на фіг. 1 (без елементів поз. 23, поз. 27, поз. 28, поз. 31, поз. 32, поз. 33 і МС верхньої); на фіг. 3 показаний розріз Б-Б на фіг. 1; на фіг. 4 показаний місцевий вид В на фіг. 2; на фіг. 5 показаний місцевий вид Г на фіг. 2; на фіг. 6 показаний розріз Д-Д на фіг. 2; на фіг. 7 показана конструкція ЧЕ; на фіг. 8 показана функціональна електрична схема АК. Акселерометр (фіг. 1-7) складається з корпусу 1, у верхній частині якого розміщено ЧЕ, що складається з IМ, яка утворена рухомою пластиною 2, укріпленими на ній котушками 3 і 4, і шторкою 5 з щілиною 6, що виконана вздовж осі ОХ маятника, нерухомої основи 7 і пружного підвісу 8 пластини 2 IМ до основи 7. Котушки 3, 4 з пластиною 2 з'єднані за допомогою стійок 9, 10. Основа ЧЕ 7 пружно притиснута до платиків (виступів) 11 верхньої частини корпуса 1, за допомогою гвинта 12, пружинної шайби 13 і гайки 14. На корпусі розташований оптичний ДК, який складається з нерухомо встановлених, наприклад, за допомогою зварювання, на корпус один навпроти одного джерела світла 15 - світлодіода (далі по тексту СД), і диференціального приймача світла 16- двоелементного фотодіода (далі по тексту ФД) з верхньою 17 і нижньою 18 прийомними площадками. ЧЕ відносно корпуса центрується штифтом 19, що забезпечує задане положення шторки між СД 15 і ФД 16. На корпусі 1 також розміщено ДМ АК, який складається з верхньої та нижньої МС і котушок 3 і 4. Верхня МС складається з кільцевих внутрішнього 20, зовнішнього 21 магнітопроводів та кільцевого магніту 22, встановлених на кришці 23. Нижня МС складається з кільцевих внутрішнього 24, зовнішнього 25 магнітопроводів та кільцевого магніту 26, встановлених на корпусі. Верхня МС зовнішнім магнітопроводом 21 встановлена на зовнішній магнітопровід 25 нижньої МС та притиснута до неї гвинтом 12 і гайкою 27. Магніти 22, 26 мають однаково спрямовану діаметральну намагніченість вздовж осі ОХ ЧЕ, при цьому вісь підвісу OY ЧЕ лежить в нейтральній площині магнітів. Котушки 3, 4 розташовані в зазорах, які утворені внутрішніми поверхнями зовнішніх магнітопроводів і зовнішніми поверхнями постійних магнітів верхньої та нижньої МС. Переміщення рухомої пластини 2 обмежена зверху і знизу обмежувачами переміщення, наприклад гвинтами 28, переміщенням яких уздовж осі OZ 3 UA 75628 U 5 10 15 20 25 30 35 40 45 50 55 60 встановлюється необхідна величина допустимого переміщення IМ. Струмопідводи 29, 30 мають форму симетричну щодо вихідної осі OY AK. Верхня МС і оптичний ДК відокремлені від плати 31 електроніки електричної схеми тепловим екраном 32. До корпусу 1 кріпиться кожух 33, який необхідний для захисту АК від зовнішніх впливів. Корпус 1 має базову установочну поверхню С, перпендикулярну BO OZ. Функціональна електрична схема АК показана на фіг.8. Вона складається з оптичного ДК, + джерела опорної напруги 34, який формує вихідні напруги різної полярності UCT і UCT (наприклад, +2.5 В І-2.5В), перемикача 35 полярності компенсуючого напруження Uк для настройки зміщення нульового сигналу АК, резисторів 36, 37 настроювального дільника напруги, який формує компенсуючу напругу Uк, коригуючої ланки 38 для електричної настройки нульового сигналу, підсилювача потужності (далі по тексту ППТ) 39, котушок ДМ 3 і 4, резистора 40, підсилювача-фільтра 41. Напруга Uв - вихідна напруга АК. До складу ДК входить СД 15, двоелементний ФД 16, шторка 5 з щілиною 6, попередній підсилювач 42 і 43, суматори 44 і 45 та регулятор струму 46. Елементи суматор 45 і регулятор струму 46 виконують функцію стабілізації КП датчика кута АК аналогічно роботі прототипу. Акселерометр працює таким чином. За відсутності вимірюваного прискорення об'єкта, на якому встановлений АК, спрямованого уздовж осі OZ, IМ маятникового ЧЕ знаходиться в нейтральному положенні. Відповідно в нейтральному положенні щодо нерухомих СД 15 і двоелементного ФД 16 знаходиться шторка 5 з щілиною 6. У нейтральному положенні, при виконаному налаштуванні нульового сигналу ДК, освітлені світловим потоком СД 15 площі кожної з світлочутливих площадок 17, 18 двоелементного ФД 16 однакові. Кожна освітлена прийомна площадка 17, 18 генерує електричний фотострум, величина якого пропорційна величині освітленої площі площадки і яскравості СД 15. У нейтральному положенні IМ величини цих фотострумів однакові, відповідно однакові і величини напруг на виході попередніх підсилювачів 42 і 43, пропорційно фотоструму. У суматорі 44 ці напруги віднімаються, що призводить до рівності нулю вихідної напруги цього суматора, яка є вихідною напругою ДК ЦЦК, і, відповідно, до відсутності вихідного сигналу UB АК. При впливі вимірюваного прискорення а вздовж осі OZ інерційна маса маятникового ЧЕ переміщається на ПП 8 щодо корпуса 1 АК під дією моменту сили інерції МІ = mla, де ml - маятниковість IМ ЧЕ акселерометра; m - маса IМ; I - відстань від осі підвісу OY до центру IМ (фіг. 1); а - прискорення. При позитивному прискоренні, щодо корпусу АК, IМ переміщається до установочної поверхні С, а при негативному - від поверхні С. Відповідно з IМ переміщається і шторка 5 з щілиною 6 на величину Za (фіг. 8) відносно світлодіода 15 і двоелементною фотодіода 16. Переміщення шторки 5 призводить до того, що освітлена СД 15 через щілину 6 площа одного світлочутливого елемента збільшується, а іншого - зменшується, відповідно змінюються і напруги на виходах попередніх підсилювачів 42 і 43, які знаходять на вході суматора 44. На виході суматора 44 формується вихідна напруга ДК Uдк у вигляді напруги постійного струму, величина якого пропорційна переміщенню Za шторки IМ, а знак відповідає напрямку цього переміщення. Далі вихідна напруга ДК Uдк проходить через коригуючу ланку 38 і ППТ 39, вихідний струм ППТ у вигляді струму негативного зворотного зв'язку Ізз подається по струмопідводах 29 і 30 на котушки 3 і 4 ДМ, які встановлені на рухомий пластині IМ. Протікаючи по котушках 3 і 4, струм Ізз взаємодіє з полями постійних магнітів 22 і 26 верхньої та нижньої МС ДМ і створює навколо осі підвісу ОУ момент зворотного зв'язку М33 (фіг. 1), який врівноважує момент сили інерції вимірюваного прискорення і повертає IМ в нейтральне положення. Протікаючи по резистору 38, струм зворотного зв'язку створює напругу Uв = І33 R де І33 - струм зворотного зв'язку; R - опір резистора 40. Напруга UB після проходження підсилювача-фільтра 41 є вихідним сигналом АК. Наявність технологічних погрішностей виготовлення деталей і складальних одиниць АК призводить до того, що нейтральному положенню шторки 5 не відповідає нульове значення вихідної напруги ДК Uдк. В прототипі настройка нульового сигналу ДК, що приводить до мінімуму напругу Uдк, проводиться механічним способом. Оскільки в АК, що заявляється, світлодіод 15 і ФД 16 ДК нерухомо встановлені на корпусі 1, то відсутня можливість механічної настройки нульового сигналу ДК, а для настройки нульового 4 UA 75628 U 5 10 15 20 25 30 35 40 45 50 55 сигналу ДК використовується електричний спосіб, який полягає в тому, що на коригуючу ланку 38 подається компенсуюча напруга Uк, така що напруга на виході коригуючої ланки 38 UКЛ дорівнює нулю при нейтральному положенні шторки ЧЕ. Для формування необхідного компенсуючої напруги Uк, АК встановлюється так, щоб IМ його ЧЕ перебувала в нейтральному положенні. Як перемикач 35 полярності компенсуючої напруги до відповідних контактів плати електроніки 32 електричної схеми припаюється тумблер. Замість резисторів 36, 37 як дільник напруги підключається змінний резистор, з движка якого на коригуючу ланку 38 надходить компенсуюча напруга Uк. За допомогою тумблера на змінний резистор подається напруга з полярністю протилежною напрузі Uдк. Змінним резистором змінюється величина компенсуючої напруги UK, таким чином, щоб на виході коригуючої ланки 38 отримати напругу UК3 рівну нулю. Далі замість змінного резистора підбираються і впаюються два резистори з номіналами, що забезпечують такий же коефіцієнт ділення джерела опорної напруги, як і у змінного резистора, а замість тумблера - перемичку, яка замикає відповідні контакти плати. Відмінності в роботі АК, який заявляється, від прототипу пояснює фіг. 1. Робота АК фізично аналогічна роботі прототипу, при цьому застосування другої (верхньої) магнітної системи забезпечує в порівнянні з прототипом наступні переваги: 1) дозволяє в два рази збільшити момент зворотного зв'язку, що створюється ДМ, і відповідно, в два рази діапазон вимірювання АК при однаковому струмі зворотного зв'язку; 2) при однаковому з прототипом вимірюваному прискоренні дозволяє в два рази зменшити струм зворотного зв'язку, а також, оскільки розсіювана теплова потужність котушки квадратично залежить від сили струму в котушці, зменшити в 4 рази розсіювану у вигляді тепла електричну потужність кожної з двох котушок ДМ, і, відповідно, зменшити в 4 рази додаткову температурну похибку КП АК від перегріву магнітів ДМ власним струмом зворотного зв'язку; Використання двох МС розташованих знизу і зверху пластини ЧЕ, а також установка основи ЧЕ на платики 11 (мінімізується контакт пластини ЧЕ з металевим корпусом АК (температура корпусу, що контактує із зовнішніми тепловідвідними предметами, завжди відрізняється від температури повітря (газу) всередині АК)) дозволяє забезпечити рівні умови, з точки зору її конвективного теплообміну з навколишнім повітрям, зверху і знизу, і забезпечує однаковість температур її верхньої і нижньої поверхонь, що виключає її температурну деформацію у вертикальній площині АК, що призводить до шкідливого переміщення шторки ЧЕ вздовж ВО АК щодо жорстко зв'язаних з корпусом площадок 17 і 18 ФД 16 ДК, і, відповідно, зменшує додаткову температурну похибку зміщення нульового сигналу АК. Тепловий екран 32 ізолює верхню область АК з розташованої в ній платою 31 електроніки електричної схеми від нижньої області з розташованими в ній ДМ і ДК, причому тепловий баланс верхньої області з навколишнім середовищем відбувається через верхню частину кожуха 33 АК, що дозволяє зменшити тепловий вплив плати 31 електроніки електричної схеми на ДК і ДМ, та відповідно зменшити додаткову температурну похибку нульового сигналу і КП акселерометра. Використання регульованих обмежувачів кутового переміщення ЧЕ щодо ПП у вигляді гвинтів 28, встановлених у верхній і нижній МС, обмежує допустиме кутове переміщення малою величиною (наприклад ± 0,05…0,1 мм), що виключає пластичну деформацію ПП при ударних впливах на АК, особливо у вимкненому стані. Це забезпечує стабільність зміщення нуля при механічних і ударних впливах. Притиснення основи ЧЕ до платиків 11 корпуса 1 АК пружиною, наприклад трипелюстковою шайбою 13, і жорстке кріплення пружини до корпусу гвинтом 12 з гайкою 14, забезпечує вертикальне (вздовж ВО) зусилля притиснення, яке практично виключає радіальні механічні деформації та напруження в основі 7, довготривала релаксація яких могла б призвести до переміщення шторки ЧЕ вздовж ВО АК, яке викликало б виникнення похибки від довготривалої або температурної нестабільності зміщення нуля АК; Використання двох ідентичних струмопідводів, розташованих у вертикальній площині симетрично відносно вихідної осі OY ЧЕ акселерометра, забезпечує взаємну компенсацію пружних моментів деформації струмопідводів при складанні АК, а також моментів, які виникають у струмопідводах під впливом температури. Моменти, які створюються кожним струмопідводом навколо вихідної осі OY ЧЕ акселерометра практично рівні за величиною і протилежні за знаком, що істотно зменшує тяжіння ЧЕ з боку струмопідводів. В результаті цього істотно зменшуються додаткові похибки зміщення нульового сигналу від довготривалої або температурної нестабільності АК, викликані тяжінням ЧЕ з боку струмопідводів; Всі заявлені в корисній моделі технічні рішення підтверджені результатами експериментальних досліджень і випробувань АК, в якому вони реалізовані. 60 5 UA 75628 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 1. Компенсаційний акселерометр з оптичним датчиком кута, що містить корпус з базовою установочною поверхнею, з розташованими в ньому чутливим елементом у вигляді маятника, що складається з інерційної маси, яка утворена рухомою пластиною, пружно прикріпленою до основи чутливого елемента, котушкою, встановленою на рухомій пластині, та екрануючим елементом, сполученого з рухомою пластиною, зі щілиною, спрямованою уздовж осі маятника, датчиком кута, який складається з джерела світла і диференціального приймача світла, розташованих один проти одного з розміщенням екрануючого елемента між ними, датчиком моменту, струмопідводів до котушки маятника, електричною системою та кожухом, герметично зв'язаним з корпусом, який відрізняється тим, що датчик моменту включає в себе верхню та нижню магнітні системи, що складаються із зовнішніх і внутрішніх магнітопроводів, постійних кільцеподібних магнітів, діаметрально намагнічених уздовж осі маятника, і двох котушок, встановлених на рухомій пластині маятника. 2. Компенсаційний акселерометр з оптичним датчиком кута за п. 1, який відрізняється тим, що рух маятника вздовж вимірювальної осі акселерометра обмежений зверху і знизу обмежувачами його переміщення. 3. Компенсаційний акселерометр з оптичним датчиком кута за п. 1, який відрізняється тим, що джерело світла та приймач світла встановлені на корпусі нерухомо, а настройка нульового сигналу датчика кута акселерометра виконується електричним способом. 4. Компенсаційний акселерометр з оптичним датчиком кута за п. 1, який відрізняється тим, що основа чутливого елемента встановлена на платики корпусу та притиснута до корпусу пружинною шайбою. 5. Компенсаційний акселерометр з оптичним датчиком кута за п. 1, який відрізняється тим, що плата електроніки електричноїсистеми відокремлена від магнітних систем і оптичного датчика кута тепловим екраном. 6. Компенсаційний акселерометр з оптичним датчиком кута за п. 1, який відрізняється тим, що струмопідводи до котушок маятника мають форму, що забезпечує кутову симетрію навколо вихідної осі акселерометра, яка є віссю підвісу рухомої пластини чутливого елемента. 6 UA 75628 U 7 UA 75628 U 8 UA 75628 U 9 UA 75628 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 10
ДивитисяДодаткова інформація
Назва патенту англійськоюCompensation accelerometer with optical angle sensor
Автори англійськоюBatalin Oleksandr Serhiiovych, Novychenko Anatolii Vasyliovych, Manuilenko Vitalii Mykhailovych, Cherniak Mykolai Hryhorovych, Skrypkovskyi Hennadii Oleksiiovych, Vaschenko Valerii Mykolaiovych, Rozdrohin Yevhen Ramiliovych
Назва патенту російськоюКомпенсационный акселерометр с оптическим датчиком угла
Автори російськоюБаталин Александр Сергеевич, Новиченко Анатолий Васильевич, Мануйленко Виталий Михайлович, Черняк Николай Григорьевич, Скрипковский Геннадий Алексеевич, Ващенко Валерий Николаевич, Роздрогин Евгений Рамильевич
МПК / Мітки
МПК: G01P 15/13
Мітки: акселерометр, компенсаційний, оптичним, кута, датчиком
Код посилання
<a href="https://ua.patents.su/12-75628-kompensacijjnijj-akselerometr-z-optichnim-datchikom-kuta.html" target="_blank" rel="follow" title="База патентів України">Компенсаційний акселерометр з оптичним датчиком кута</a>
Компенсаційний акселерометр з оптичним датчиком кута

Номер патенту: 25676
Опубліковано: 10.08.2007
Автор: Цисарж Вячеслав Вікторович
МПК: G01P 15/13
Мітки: оптичним, кута, датчиком, акселерометр, компенсаційний
Формула / Реферат:
1. Компенсаційний акселерометр з оптичним датчиком кута, що містить корпус з базовою установочною поверхнею, з розташованими в ньому чутливим елементом у вигляді маятника, пружно прикріпленим до корпусу і виконаним як екрануючий елемент з щілиною, датчиком кута, який складається з джерела світла і диференціального приймача світла, розташованих один проти одного з розміщенням екрануючого елементу між ними, датчиком моменту, що містить у собі...
Датчик кутової швидкості на базі динамічно налагоджуваного гіроскопу з оптичним датчиком кута
Номер патенту: 71782
Опубліковано: 25.07.2012
Автори: Аврутов Вадим Вікторович, Симоненко Владислав Миколайович
МПК: G01C 19/38
Мітки: базі, кута, датчиком, гіроскопу, кутової, датчик, налагоджуваного, швидкості, оптичним, динамічної
Формула / Реферат:
Датчик кутової швидкості, який використовується в інерціальних навігаційних системах, що містить динамічно налаштовуваний гіроскоп, який відрізняється тим, що знімання інформації про кути повороту ротора навкруг осей торсіонів здійснюється за допомогою оптичного, а не ємнісного датчика кута.
Компенсаційний акселерометр
Номер патенту: 21726
Опубліковано: 15.03.2007
Автори: Скрипковський Геннадій Олексійович, Черняк Микола Григорович
МПК: G01P 15/00
Мітки: компенсаційний, акселерометр
Формула / Реферат:
1. Компенсаційний акселерометр, що містить рознімний корпус з однією базовою настановною поверхнею, з розташованими в ньому рухомою пластиною чутливого елемента, встановленою на пружному підвісі, верхньою і нижньою магнітними системами, кожна з яких складається з магнітопроводу, постійного магніту і полюсного наконечника, причому магнітні системи в поєднанні з двома рухомими котушками, з'єднаними послідовно, розташованими на рухомій пластині...
Спосіб реєстрації сейсмічного сигналу волоконно-оптичним датчиком
Номер патенту: 77449
Опубліковано: 15.12.2006
Автори: Шинкарук Олег Миколайович, Лисий Микола Іванович
МПК: G08B 13/18, G01V 1/28
Мітки: реєстрації, сейсмічного, датчиком, волоконно-оптичним, спосіб, сигналу
Формула / Реферат:
Спосіб реєстрації сейсмічного сигналу волоконно-оптичним датчиком, який полягає в тому, що застосовують волоконно-оптичний датчик решітчастого типу для визначення амплітуди сейсмічного сигналу, який відрізняється тим, що застосовують волоконно-оптичний датчик решітчастого типу з лінійно наростаючою шириною прозорих штрихів тільки в одній решітці, і базуючись на періодичності функції оптичного пропускання такого датчика, з послідовності...
Компенсаційний датчик зенітного кута

Номер патенту: 26202
Опубліковано: 10.09.2007
Автори: Ковшов Генадій Миколайович, Садовникова Олександра Володимирівна, Пономарьова Олена Анатоліївна
МПК: E21B 47/02
Мітки: датчик, кута, зенітного, компенсаційний
Формула / Реферат:
Компенсаційний датчик зенітного кута, що містить корпус, котушку індуктивності, осердя, яке являє собою чутливий елемент датчика у вигляді тонкої берилієвої струни з пермалоєвим покриттям, закріпленої з одного кінця, який відрізняється тим, що датчик додатково обладнаний ланцюгом зворотного зв'язку з електромагнітом, а на вільному кінці чутливого елемента закріплений постійний магніт.
Попередній патент: Спосіб ранньої діагностики кишкової метаплазії слизової оболонки шлунка
Наступний патент: Барабан копальневої підйомної машини з внутрішнім гальмом
Випадковий патент: Вантажоупорний зупинник