Установка для обробки зануренням

Формула / Реферат
1. Установка для обробки зануренням, насамперед фарбування зануренням, предметів, насамперед автомобільних кузовів, яка містить
а) щонайменше одну заглибну ванну, що виконана з можливістю заповнення технологічною рідиною до певного рівня,
б) транспортну систему, за допомогою якої предмети, що підлягають обробці, мають можливість переміщення до заглибної ванни, у неї, з неї й від неї, і яка має напрямний пристрій, а також щонайменше один виконаний з можливістю переміщення уздовж напрямного пристрою транспортний візок, що, у свою чергу, містить:
ба) привідний двигун для траверсного переміщення уздовж напрямного пристрою,
бб) утримувальну раму, що виконана з можливістю закріплення на ній щонайменше одного предмета,
бв) занурювальний пристрій, який має щонайменше одну вісь обертання або повороту, на якому закріплена утримувальна рама,
в) керуючий пристрій, в якому записана задана траєкторія занурення закріпленого на утримувальній рамі предмета і який керує рухом закріпленого на утримувальній рамі предмета,
яка відрізняється тим, що
г) передбачена система запобігання зіткненням, що містить:
га) для кожного можливого ступеня вільності руху закріпленого на утримувальній рамі (212) предмета (204) датчик (274, 275, 276) вимірювання положення, що вимірює абсолютне значення,
гб) запам'ятовувальний пристрій, в якому збережена траєкторія першої граничної поверхні або граничної лінії (270), що відображає траєкторію твердої структури уздовж траєкторії руху предмета (204),
гв) запам'ятовувальний пристрій, в якому збережена траєкторія другої граничної поверхні або граничної лінії (271), що проходить на відстані від першої граничної поверхні або граничної лінії (270), при цьому між першою граничною поверхнею або граничною лінією (270) і другою граничною поверхнею або граничною лінією (271) утворена зона (272) захисту від зіткнень,
гг) запам'ятовувальний пристрій, в якому збережена траєкторія контуру (273), що представляє траєкторію контуру закріпленого на утримувальній рамі (212) предмета (204),
при цьому
д) керуючий пристрій (232) на підставі положення сигналів, що надходять у нього від датчиків (274, 275, 276) вимірювання, і збережених даних про траєкторію другої граничної поверхні або граничної лінії (271), а також про контур (273), що представляє закріплений на утримувальній рамі (212) предмет (204), постійно або через певні проміжки часу обчислює, чи ввійшов контур (273) у зону (272) захисту від зіткнень чи ні, і у першому випадку зупиняє подальший рух предмета (204).
2. Установка за п. 1, яка відрізняється тим, що керуючий пристрій (232) переміщається на транспортному візку (208).
3. Установка за п. 1 або п. 2, яка відрізняється тим, що передбачений пристрій (274', 275', 277, 278) верифікації, що верифікує коректне функціонування датчиків (274, 275, 276) вимірювання положення.
4. Установка за п. 3, яка відрізняється тим, що пристрій (274', 275', 277, 278) верифікації щонайменше для однієї частини датчиків (274, 275) вимірювання положення має дублюючий аналогічний датчик (274', 275') вимірювання положення.
5. Установка за п. 3 або п. 4, яка відрізняється тим, що пристрій (274', 275', 277, 278) верифікації щонайменше для частини датчиків (276) вимірювання положення має стаціонарний пристрій (277, 278), повз якого закріплений на утримувальній рамі (212) предмет (204) проводиться щонайменше один раз, де його положення визначається незалежно.
6. Установка за п. 5, яка відрізняється тим, що стаціонарний пристрій містить щонайменше один фоторелейний бар'єр (277, 278).
7. Установка за одним із попередніх пунктів, яка відрізняється тим, що ширина зони (272) захисту від зіткнень є функцією швидкості предмета (204).
8. Установка за одним із попередніх пунктів, яка відрізняється тим, що передбачений автоматично працюючий пристрій визначення типу кузова.
Текст
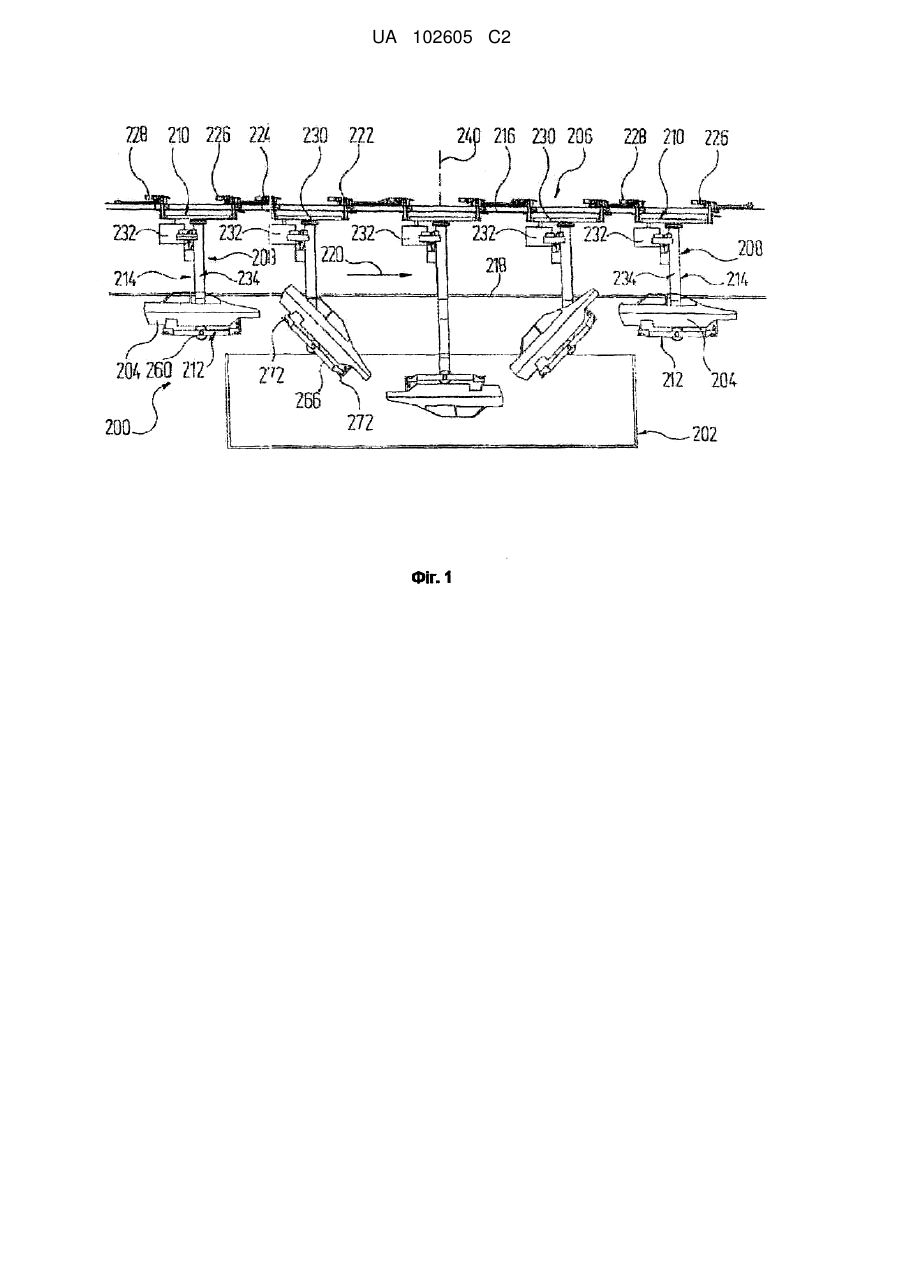
Реферат: Установка (200) для обробки зануренням предметів (204) працює з відомою транспортною системою (206). Для запобігання зіткненням предметів (204) із твердою структурою, пов'язаною з траєкторією руху, для кожного можливого ступеня вільності руху закріпленого на утримувальній рамі (212) предмета (204) передбачений датчик (274, 275, 276) вимірювання положення, що вимірює абсолютне значення. У запам'ятовувальному пристрої збережена траєкторія першої граничної поверхні або граничної лінії (270), що відображає траєкторію твердої структури уздовж траєкторії руху предмета (204). Крім цього, збережена траєкторія другої граничної поверхні або граничної лінії (271), що проходить на відстані від першої граничної поверхні або граничної лінії (270). Нарешті, збережена траєкторія контуру (273), що представляє траєкторію закріпленого на утримувальній рамі (212) предмета (204). Керуючий пристрій (232) на підставі положення сигналів, що надходять у нього від датчиків (274, 275, 276) вимірювання, та інших збережених даних обчислює, чи перетинає представлений закріплений на утримувальній рамі (212) предмет (204) контур (273) другу граничну поверхню або граничну лінію (271) чи ні, і у першому випадку негайно зупиняє подальший рух предмета (204). UA 102605 C2 (12) UA 102605 C2 UA 102605 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід відноситься до установки для обробки зануренням, насамперед фарбування зануренням, предметів, насамперед, автомобільних кузовів, з: а) щонайменше однією заглибною ванною, яка виконана з можливістю заповнення технологічною рідиною до певного рівня, б) транспортною системою, за допомогою якої предмети, що підлягають обробці, мають можливість переміщення до заглибної ванни, у неї, з неї й від неї, і має напрямний пристрій, а також щонайменше один виконаний з можливістю переміщення уздовж напрямного пристрою транспортний візок, що, у свою чергу, містить у собі: ба) приводний двигун для траверсного переміщення уздовж напрямного пристрою, бб) утримувальну раму, що виконана з можливістю закріплення на ній щонайменше одного предмета, бв) який має щонайменше одну вісь обертання або повороту пристрій, що занурює, на якому закріплена утримувальна рама, в) керуючий пристрій, в якому записана задана траєкторія занурення для закріпленого на утримувальній рамі предмета і який керує рухом закріпленого на утримувальній рамі предмета. Застарілі установки для фарбування зануренням автомобільних кузовів як транспортна система використовують транспортер періодичної дії. У ньому кожний автомобільний кузов утримувався двома маятниковими підвісами на одних, з'єднуючих нижні кінці маятникового підвісу полозках. Маятникові підвіси, у свою чергу, були закріплені на транспортному ланцюзі, траєкторія висоти якого задавала відповідне місцеве вертикальне положення автомобільного кузова, що транспортується. У таких частково до цього часу ще експлуатованих установках через описану конструкцію не існувало небезпеки того, що автомобільний кузов, який транспортується, зіштовхнеться з твердою структурою, яка є сусідньою з його траєкторією руху, наприклад стінкою заглибної ванни, або розташованими між двома заглибними ваннами технологічними пристроями, наприклад розпилювачами. Особливих мір безпеки для цього не було потрібно. Схожа ситуація дійсна й для описаної у DE 196 41 048 А1 установки для обробки зануренням, у якій відповідно кожний несучий автомобільний кузов поворотний візок за допомогою ланцюгів простягався уздовж системи напрямних і за допомогою механічної напрямної куліси примусово вводилася з обертанням у заглибну ванну й знову виводилася з обертанням з неї. Тут також зіткнення оброблюваного автомобільного кузова з розташованою поряд із траєкторією руху твердою структурою було можливе тільки у виняткових випадках, у яких відмовляє один із механічних напрямних пристроїв. Оскільки як працюючі з транспортером періодичної дії установки для обробки зануренням, так і ті, які описані у DE 196 41 048 А1, мають відносно невелику гнучкість, останнім часом все більше значення придбали установки для обробки зануренням названого на початку типу, як вони описані, наприклад, у DE 101 03 837 В4 або ж у DE 100 29 939 СІ. Такі установки для обробки зануренням мають спільне у тому, що вони використовують виконані з можливістю незалежного переміщення, забезпечені власними приводними двигунами транспортні візки, які утримуваний ними предмет за допомогою пристрою, що занурює, занурюють у заглибну ванну й знову виймають з неї. При цьому рух занурення містить у собі щонайменше один обертальний або коливальний рух відносно щонайменше однієї осі обертання або хитання. Лінійний рух транспортного візка уздовж відповідного напрямного пристрою, а також рух занурення мають можливість незалежного від відповідних рухів інших транспортних візків в установці керування. Таким способом виходить гнучкість всієї системи, яка була недосяжна у застарілих установках, насамперед, що використовують транспортні ланцюги. Але зменшена кількість механічних примусових напрямних, впливу яких підлягають виконані з можливістю самостійного переміщення транспортні візки, збільшує небезпеку того, що при певних системних помилках, насамперед, помилках керування й програмних помилках, предмет, що підлягає обробці, зіштовхнеться з твердою структурою, яка перебуває по сусідству з траєкторією руху, насамперед стінкою заглибної ванни. Завданням даного винаходу є розробка установки названого спочатку типу таким чином, що небезпека зіткнення предмета, що підлягає обробці, з твердою структурою, яка перебуває на траєкторії руху, є практично виключеною. Відповідно до винаходу це завдання вирішене тим, що: г) передбачена система виключення зіткнень, що містить у собі: га) для будь-якого можливого ступеня вільності руху закріпленого на утримувальній рамі предмета датчик вимірювання положення, що вимірює абсолютне значення, 1 UA 102605 C2 5 10 15 20 25 30 35 40 45 50 55 60 гб) запам'ятовувальний пристрій, в якому збережена траєкторія першої граничної поверхні або граничної лінії, що відображає траєкторію твердої структури уздовж траєкторії руху предмета, гв) запам'ятовувальний пристрій, в якому збережена траєкторія другої граничної поверхні або граничної лінії, що проходить на відстані від першої граничної поверхні або граничної лінії, при цьому між першою граничною поверхнею або граничною лінією й другою граничною поверхнею або граничною лінією утворена зона захисту від зіткнень, гг) запам'ятовувальний пристрій, в якому збережена траєкторія контуру, що представляє траєкторію контуру закріпленого на утримувальній рамі предмета, при цьому д) керуючий пристрій на підставі положення сигналів, що поступають у нього від датчиків вимірювання, і збережених даних про траєкторію другої граничної поверхні або граничної лінії, а також про контур, що представляє закріплений на утримувальній рамі предмет, постійно або через певні проміжки часу розраховує, чи ввійшов контур у зону захисту від зіткнення чи ні, і у першому випадку зупиняє подальший рух предмета. Отже, відповідно до винаходу тверда структура, що перебуває на траєкторії руху предмета, представлена за допомогою щонайменше наближеної до даного контуру граничною поверхнею або граничною лінією, оточується зоною захисту від зіткнень, перетинання фізично не існуючої граничної поверхні або граничної лінії якої заборонено контуру, що представляє траєкторію контуру закріпленого на утримувальній рамі предмета. Під "поданням" тут розуміється наближення до точної геометрії, яка може бути виконана, наприклад, по типу полігональної лінії. Якщо наявний у виді контур вторгається у зону захисту від зіткнень, то подальший рух предмета негайно зупиняється й, при необхідності, подається сигнал тривоги. У такий спосіб можна надійно уникнути зіткнення, що загрожує. У загальному випадку транспортний візок у бічному напрямку направляється настільки добре, що у цьому напрямку не потрібно приймати спеціальних мір для виключення зіткнень. Досить лише двомірного розгляду у вертикальній площині, що включає транспортний напрямок, наприклад у вертикальній центральній площині предмета, що підлягає обробці. Це полегшує збереження у пам'яті важливих геометрій і знижує обчислювальне навантаження при перевірці зіткнень. Доцільно, якщо керуючий пристрій переміщається разом із транспортним візком. Таким способом зменшуються тимчасові затримки, пов'язані з передачею інформації. Переважно, передбачений пристрій верифікації, що верифікує коректність роботи датчиків вимірювання положення. Через серйозні ушкодження, які можуть виникнути при зіткненні предмета, що підлягає обробці, з твердою структурою, необхідно, щоб система запобігання зіткнень працювала надійно, насамперед, щоб датчики вимірювання положення, на яких заснована система, працювали коректно. Це повинно забезпечити відповідний до винаходу пристрій верифікації. Пристрій верифікації може містити у собі щонайменше для частини датчиків вимірювання положення дублюючий аналогічний датчик вимірювання положення. Доти, поки обидвапов'язаних один із одним датчики вимірювання положення видають показання по суті у межах вікна допуску, можна говорити про коректне функціонування датчиків вимірювання положення. Якщо обидва вихідних сигнали сильно різняться, варто припустити наявність помилки й також зупинити рух предмета. Пристрій верифікації щонайменше для частини датчиків вимірювання положення може містити у собі й стаціонарні пристрої, повз які закріплений на утримувальній рамі предмет проводиться щонайменше один раз, і де його положення визначається незалежно. У цьому випадку пристрій верифікації працює не постійно, а через певні проміжки часу, і завжди у той момент, коли утримувальна рама зі закріпленим на ній предметом проводиться повз нього. У загальному випадку цього досить, щоб вчасно виявити помилку у датчику вимірювання положення. Названий стаціонарний пристрій може містити у собі, наприклад, фоторелейний бар'єр, промінь якого у певному положенні предмета, що підлягає обробці, переривається або відкривається, або ультразвуковий датчик або датчик, що спрацьовує на метал, або лінійну скануючу систему або тому подібне. Особливо доцільно, якщо ширина зони захисту від зіткнень є функцією швидкості. Таким способом враховується, що шлях, який проходить предмет, що підлягає обробці, між виявленням помилки, яка можливо веде до зіткнення, й припиненням руху предмета, росте зі збільшенням швидкості предмета. У цьому випадку потрібно по можливості передбачити систему розпізнавання типу кузова, що автоматично визначає тип оброблюваного у цей момент автомобільного кузова. Вона може 2 UA 102605 C2 5 10 15 20 25 30 35 40 45 50 55 60 містити у собі, наприклад, декілька фоторелейних бар'єрів, повз які проводиться автомобільний кузов горизонтальним і вертикальним рухом, або система обробки зображень або кодів. Далі приклад виконання винаходу докладніше роз'ясняється на підставі креслення. Показано: Фігура 1 у вигляді збоку катафорезна установка для обробки зануренням автомобільних кузовів, Фігура 2 перспективне зображення транспортного візка, як він використовується в установці фарбування зануренням на фігурі 1, з автомобільним кузовом під час процесу занурення у заглибну ванну, Фігура 3 схематичний вигляд збоку фрагмента установки фарбування зануренням на фігурі 1, настроєної на запобігання зіткнень, при цьому небезпека зіткнення для закріпленого на транспортному візку автомобільного кузова відсутня, Фігура 4 схожий з фігурою 3 вигляд, однак тут переміщуваний транспортним візком автомобільний кузов піддається небезпеці зіткнення. Спочатку звернемося до фігур 1 і 2. Зображена на них і позначена загальним посилальним позначенням 200 катафорезна установка для фарбування зануренням являє собою лише приклад виконання установки для фарбування зануренням, у якій застосовується відповідна до винаходу система запобігання зіткнень. Вона містить у собі наповнену рідкою фарбою заглибну ванну 202. Частинки фарби в електричному полі, яке створене між автомобільними кузовами 204, і анодами, які розташовані уздовж шляху переміщення автомобільних кузовів 204 і для наочності не показані, переміщаються до автомобільних кузовів 204 і осідають на них. Автомобільні кузови 204 за допомогою транспортної системи 206 направляються через установку й, насамперед, через заглибну ванну 202 і фарбу, що перебуває там. Вона містить у собі множину транспортних візків 208, які, зі своєї сторони, мають провідний візок 210 і несучу раму 212, які з'єднані один із одним за допомогою детально описаного далі телескопічного пристрою 214. Над заглибною ванною 202 простягається приводна напрямна 216, така як використовується у стандартних електричних підвісних дорогах. Напрямок руху, в якому автомобільні кузови 204 подаються транспортною системою 206, показаний на фігурі 1 стрілкою 220. Приводна напрямна 216 зміщена назовні щодо центра заглибної ванни 202 у напрямку, перпендикулярному площині креслення фігури 1. Провідний візок 210 являє собою конструкцію, принцип якої відомий з електричних підвісних доріг. Кожний з цих провідних візків 210 має випереджальний за напрямком руху 220 ходовий механізм 222, професійною мовою називається "попередник", а також доганяє за напрямком руху 220 додатковий ходовий механізм 224, що професійною мовою називається "наступник". Попередник 222 і наступник 224 відомим способом оснащені напрямними й опорними роликами, які тут не мають власного посилального позначення, і прокочуються за різними поверхнями Іподібного профілю приводної напрямної 116. Як мінімум один із роликів попередника 222 або наступника 224 служить як приводний ролик і для цього виконаний з можливістю обертання за допомогою електродвигуна 226 або 228. Попередник 222 і наступник 224 кожного провідного візка 210 з'єднані один із одним за допомогою сполучної рами 230. Вона, знову ж відомим способом, несе на собі керуючий пристрій 232, що може підтримувати зв'язок із центральною системою керування установки 200 для фарбування зануренням і, при необхідності, з керуючими пристроями 232 інших, наявних в установці 200 для фарбування зануренням провідних візків 210. У такий спосіб можливий у значній мірі незалежний рух різних транспортних візків 208 і розташованих на них рухливих частин. Телескопічний пристрій 214, що з'єднує провідний візок 210 з несучою рамою 212, містить у собі трисекційний телескопічний важіль 234, що проходить вертикально, який виконаний з можливістю змінювати свою довжину. Він має верхню телескопічну секцію 246, середню телескопічну секцію 254, а також нижню телескопічну секцію 256, які виконані з можливістю відносного зсуву одна щодо одної. Необхідні для цього, керовані керуючим пристроєм 232 двигуни не показані. У нижній вільній кінцевій зоні 258 нижньої телескопічної секції 256 підвішена поворотна цапфа 260. Вона задає показану на фігурі 2 горизонтальну вісь 262 обертання. Поворотна цапфа 260 за допомогою веденого телескопічною секцією 256, не показаного на кресленні приводного двигуна 264, що керується за допомогою керуючого пристрою 232 транспортного візка 208, може провертатися щодо осі 262 обертання в обох напрямках. Несуча рама 212 відомим чином містить у собі два лонжерона 266, які проходять паралельно один одному, з яких на фігурах 1 і 2 видний тільки відповідно спрямований до 3 UA 102605 C2 5 10 15 20 25 30 35 40 45 50 55 спостерігача. По центру вони з'єднані один із одним за допомогою поперечної траверси 270. Поворотна цапфа 260 без можливості обертання жорстко з'єднана зі зовнішньою поверхнею лонжерона 266 утримувальної рами 212. На кінцях лонжеронів 266 і 268 розміщені кріпильні засоби 272, за допомогою яких загальновідомим способом з можливістю зняття можна закріпити автомобільний кузов 204, що підлягає фарбуванню, на несучій рамі 212. Таким чином, утримувальна рама 212 утримується за допомогою поворотної цапфи 260 тільки за одну сторону, так що у вертикальній зоні над утримувальною рамою 212 не розташовано жодного компонента транспортної системи 206. Тим самим усувається небезпека забруднення автомобільного кузова 204 падаючим з компонентів транспортної системи 206 брудом, наприклад пилом, маслом або тому подібним. Як згадувалося вище, телескопічні секції 246, 254 і 256 телескопічного важеля 234 можуть переміщатися відносно одна одної. Для цього поперечні перерізи окремих телескопічних секцій 246, 254 і 256 так підігнані одна до одної для того, щоб середню телескопічну секцію 254 у верхній телескопічній секції 246 і нижню телескопічну секцію 256 у середній телескопічній секції 254 можна було спрямовано переміщати. "Стандартний" принцип роботи описаної вище катафорезної установки 200 для фарбування зануренням у безперервному режимі фарбування полягає у наступному. Автомобільний кузов 204, що підлягає фарбуванню, на фігурі 1 подається по суті у горизонтальній орієнтації від станції попередньої обробки, в якій він відомим способом шляхом очищення, знежирення тощо підготовляється до процесу фарбування. При цьому телескопічні секції 246, 254 і 256 всунуті одна в одну, так що телескопічний важіль 234 має мінімально можливу довжину. Провідний візок 210 відповідного транспортного візка 208 за допомогою електродвигунів 226 і 228 подається уздовж приводної напрямної 216 до заглибної ванни 202, при цьому відповідна утримувальна рама 212 одночасно переміщається зі закріпленим на ній автомобільним кузовом 204 за допомогою телескопічного пристрою 214. Коли транспортний візок 208 наближається до торцевої стінки заглибної ванни 202, що перебуває на вхідній стороні, автомобільний кузов 204 прогресивно опускається, для чого телескопічний важіль 234 розсовується. Як тільки передня частина автомобільного кузова 204 над торцевою стінкою заглибної ванни 202 починає виступати всередину заглибної ванни 202, за допомогою згаданого вище приводного двигуна поворотна цапфа 260 і, тим самим, утримувальна рама 212 зі закріпленим на ній автомобільним кузовом 204 провертаються навколо осі 262 обертання. У цій фазі загальний рух автомобільного кузова 204 варто розглядати як накладення трьох рухів, а саме, одного горизонтального лінійного руху (стрілка 220) уздовж приводної напрямної 216, одного вертикального лінійного руху уздовж поздовжньої осі телескопічного важеля 234 і одного обертового руху навколо осі 262 обертання поворотної цапфи 260. При цьому автомобільний кузов 204 "загортається" навколо торцевої стінки заглибної ванни 202 з боку входу. Відповідне положення перспективно показане на фігурі 2. При тривалому опусканні й тривалому обертанні автомобільного кузова 204 навколо осі 262 обертання поворотної цапфи 260 нарешті досягається положення, в якому автомобільний кузов 204 розташований по суті вертикально. При цьому автомобільний кузов 204 усе ще перебуває відносно близько до торцевої стінки заглибної ванни 202 з боку входу. У міру того, як транспортний візок 208 рухається далі й, тим самим, відстань між центром автомобільного кузова 204 і торцевою стінкою заглибної ванни 202 з боку входу росте, поворотна цапфа 260 і з нею автомобільний кузов 204 провертаються далі за годинниковою стрілкою, так що автомобільний кузов 204 починає лежати на спині. Саме пізніше у той момент, коли автомобільний кузов 204 повністю перебуває "на спині" і, тим самим, знову горизонтально, автомобільний кузов 204 повністю занурений у рідку фарбу. Потім автомобільний кузов 204 у цьому положенні за допомогою транспортного візка 208 далі просувається через заглибну ванну 202, поки він не наблизиться до торцевої стінки заглибної ванни 202 з боку виходу. Потім починається процес виймання автомобільного кузова 204. Він знову представляється накладенням трьох рухів, а саме, горизонтального лінійного руху у напрямку 220 подачі, вертикального руху уздовж поздовжньої осі телескопічного важеля 234, і обертового руху навколо осі 262 обертання поворотної цапфи 260. При цьому автомобільний кузов 204 при зменшенні довжини телескопічного важеля 234 і при продовженні поступального руху утримувальної рами 212 і при продовженні обертового руху "обгортається" навколо торцевої стінки заглибної ванни 202 з боку виходу, доти, поки у напрямку 220 подачі після заглибної ванни 202 не буде знову досягнуте горизонтальне положення свіжопофарбованого автомобільного кузова 204. 4 UA 102605 C2 5 10 15 20 25 30 35 40 45 50 55 Описані процеси руху відбуваються під впливом програми, яка збережена у пам'яті переміщуваного різними транспортними візками 208 керуючого пристрою 232, і, при необхідності, за підтримкою розташованого вище за ієрархією центрального керування установки 200 для фарбування зануренням. Як і у будь-якому технічному пристрої в описаній вище установці 200 для фарбування зануренням також можуть виникати помилки. Без описаних далі мір вони можуть привести до зіткнень між автомобільними кузовами 204, що підлягають фарбуванню, і твердими структурами, насамперед стінками заглибної ванни 202. Названі помилки можуть бути помилками обслуговуючого персоналу, наприклад неправильно вибрана траєкторія занурення для відповідно оброблюваного автомобільного кузова, або помилками виконаного програмування керуючих пристроїв 232. Також помилки можуть виникати й при так званому "ручному переміщенні", при якому окремі транспортні візки 208 з підвішеними автомобільними кузовами 204 переміщаються під "ручним керуванням", тобто без звертання до запрограмованої у керуючому пристрої 232 траєкторії занурення. Нарешті, у різних використовуваних програмах керуючих пристроїв 232 також можуть бути невизначені помилки, які проявляються у непередбачений момент часу при певних обставинах і можуть негативно впливати на коректне ведення автомобільних кузовів 204 через установку 200 для фарбування зануренням. Тому описана на підставі фігур 1 і 2 установка 200 для фарбування зануренням додатково забезпечена системою запобігання зіткнень, що нижче роз'ясняється на підставі фігур 3 і 4. Дана система запобігання зіткнень складається з "програмної частини" і "апаратної частини". "Програмна частина" містить у собі записану у керуючі пристрої 232 різних візків 208, що занурюють, програму запобігання зіткнень, яка описаним далі способом втручається у "нормальну", що працює в умовах відсутності збоїв у процесі руху автомобільних кузовів 204 програму для запобігання зіткнення, що загрожують. Для цього у різних керуючих пристроях 232 запрограмовані геометричні пропорції як "твердих" стаціонарних структур установки 200 для фарбування зануренням, так і структури автомобільного кузова 204, що підлягає обробці. Під "твердими" структурами розуміються, насамперед, як різні заглибні ванни 202, так і структури, які встановлені до або після заглибних ванн 202 або які з'єднують дві заглибні ванни 202 одна з одною. Сюди відносяться й технологічні пристрої, наприклад розпилювачі, між двома заглибними ваннами. їх положення можуть залежати від типу оброблюваного у цей момент автомобільного кузова 204. Геометрія твердих структур, природно, як і геометрія автомобільного кузова 204 початково тривимірна. Але оскільки надійне бічне ведення автомобільного кузова 204 забезпечене приводною напрямною 216, то проблему запобігання зіткнень можна звести до двомірного розгляду у вертикальній площині, що включає у себе напрямок 220 руху, як це приблизно показано на фігурах 1, 3 і 4. У цьому двомірному розгляді стають з плоских ліній. Обмежувальна лінія твердих структур позначена на фігурах 3 і 4 посилальним позначенням 270. Як уже згадувалося, вона збережена у пам'яті різних керуючих пристроїв 232.1 оскільки вона, як згадано вище, може залежати від типу оброблюваного кузова 204, на зображеній ділянці установки попередньо включений автоматично працюючий пристрій визначення типу кузова. На підставі результатів визначення вибирається відповідно використовувана обмежувальна лінія 270. Також збережена у пам'яті гранична лінія 271 зони 272 захисту від зіткнень, яка проходить паралельно граничної лінії твердих структур 270, звернена до траєкторії руху автомобільного кузова 204, що перебуває між цією граничною лінією 271 і граничною лінією 270 твердих структур. Ширина зони 272 захисту від зіткнень і, тим самим, відстань між граничними лініями 271 і 270 може бути незмінною або, при необхідності, також і динамічною. В останньому випадку ширина зони 272 захисту від зіткнень збільшується разом зі швидкістю переміщення автомобільного кузова 204. Положення граничної лінії 271 розраховується керуючими пристроями 232 на підставі відомого їм положення граничної лінії 270 твердих структур і без додаткових заходів відомої керуючим пристроям 232 швидкості руху автомобільних кузовів 204. Під "швидкістю руху" автомобільного кузова 204 у найпростішому випадку можна розуміти швидкість руху компонента у горизонтальному напрямку, тут найбільше надійним є облік максимальної швидкості, яку досягає точка автомобільного кузова 204 при сукупному русі, що складається з трьох типів рухів. Крім того, у керуючих пристроях 232 збережена геометрія закріплених на утримувальній рамі 212 автомобільних кузовів 204. Ця геометрія, як показано на фігурах 3 і 4, у використаному 5 UA 102605 C2 5 10 15 20 25 30 35 40 45 50 55 тут двомірному розгляді може бути наближена до охоплюючого автомобільний кузов 204 і утримувальну раму 212 полігону 273 або іншої математично заданої кривої, що обгинає. "Апаратна складова" системи запобігання зіткнень містить у собі для кожного ступеня вільності лінійного руху транспортної системи 206 по два датчика 274, 274', 275, 275' вимірювання положення, що вимірюють абсолютне значення. Датчики вимірювання положення лінійного руху транспортного візка 208 уздовж приводної напрямної 216 у напрямку стрілки 220 можуть працювати, наприклад, за допомогою кодових смуг, які проходять уздовж приводної напрямної 216, та їхні коди відповідно вказують на місце, на якому вони перебувають. Ці коди зчитуються відповідно двома зчитуючими головками 274, 274', які переміщаються транспортним візком 208. Зчитуючі головки 274, 274' показані на фігурах 3 і 4 лише дуже схематично. Працюючі за схожим принципом датчики положення зі зчитуючими головками 275, 275' передбачені на телескопічному важелі 234 для реєстрації вертикального руху. Показані на фігурах 3 і 4 положення цих зчитуючих головок 275, 275' варто розуміти лише символічно. При практичному виконанні вони розташовані всередині телескопічного важеля 234 і зовні не видні. Ступінь вільності обертання несучої рами 212 навколо осі 260 обертання контролюється датчиком 276 кутового положення, яких закріплений на утримувальній рамі 212. У принципі, з цим датчиком 276 кутового положення може бути пов'язаний другий, ідентично влаштований датчик кутового положення. У цьому випадку замість другого такого датчика кутового положення передбачені два стаціонарних фоторелейних бар'єри 277, 278, які розташовані так, що промінь від обох датчиків не переривається в одному певному положенні автомобільного кузова 204. Для роботи системи запобігання зіткнень самі по собі потрібні лише зчитуючі головки 274, 275 і датчик 276 кутового положення. Додаткові зчитуючі головки 274', 275' і фоторелейні бар'єри 277, 278 є дублюванням і служать підвищенню безпеки. Описана система запобігання зіткнень працює у фоні під час звичайного виконання програми у керуючих пристроях 232 або ж при ручному керуванні у фоні керуючих команд, що віддаються обслуговуючою особою, у такий спосіб. У керуючі пристрої 232 різних несучих візків 208 від пов'язаних із ними зчитуючих головок 274 надходить інформація про відповідне миттєве положення несучих візків 208 на приводній напрямній 216, а також від зчитуючих головок 275 - про довжину відповідного телескопічного важеля 234 і, тим самим, про висоту відповідної осі 260 обертання. Датчик 276 кутового положення, у свою чергу, передає інформацію про кутове положення, що займає утримувальна рама 212 з автомобільним кузовом 204 щодо осі 260 обертання. На основі цієї інформації, а також збереженої у пам'яті керуючих пристроїв 232 інформації про граничну лінію 271 зони 272 захисту від зіткнень та ідеалізованого контуру 273 закріпленого на утримувальній рамі 212 автомобільного кузова, керуючі пристрої 232 розраховують, чи перебуває ідеалізований контур 273 за межами зони 272 захисту від зіткнень, як це зображено на фігурі 3, або ж вторгається у зону 272 захисту від зіткнень, як це показано на фігурі 4. В останньому випадку керуючий пристрій 232 подає сигнал тривоги, і негайно зупиняє керований нормальною програмою рух автомобільного кузова. Таким способом запобігається зіткнення, що загрожує, між автомобільним кузовом 204 і символізованою граничною лінією 270 твердою структурою. Описана передача інформації від різних датчиків 274, 275 і 276 вимірювання положення, що вимірюють абсолютні значення, а також пов'язані з цим обчислення можуть вироблятися через певні короткі інтервали часу по суті у режимі реального часу. Для того щоб система запобігання зіткнень при виході з ладу одного датчика 274, 275 або 276 вимірювання положення не втратила працездатність, передбачені дублюючі зчитуючі головки 274', 275' і фоторелейні бар'єри 277, 278. Інформація, яка видається парами зчитуючих головок 274, 274', 275, 275', може запитуватися одночасно й порівнюватися, якщо вони відрізняються одна від одної більше ніж на попередньо задане вікно допуску, то також подається сигнал тривоги, і подальший рух автомобільного кузова 204 зупиняється. Функціонування датчика 276 кутового положення перевіряється за рахунок того, щоб прохідність фоторелейних бар'єрів 277, 278 перевіряється у той момент, у який датчики 274, 275 і 276, що вимірюють абсолютне значення, сигналізують про таке положення автомобільного кузова 204, у якому повинна існувати прохідність фоторелейних бар'єрів 277, 278. Якщо промінь даного фоторелейного бар'єра 277, 278 до цього моменту часу перерваний, то це значить, що один із датчиків 274, 275 або 276 вимірювання положення, що вимірюють абсолютне значення, не у порядку. У цьому випадку також подається сигнал тривоги, і подальший рух автомобільного кузова 204 негайно переривається. 6 UA 102605 C2 5 Описана вище система запобігання зіткнень переважно використовується не тільки у конкретній описаній транспортній системі 206, але й скрізь, де необхідно вводити у заглибну ванну й виводити зі заглибної ванни предмети, насамперед автомобільні кузови, при накладенні один на одного щонайменше одного лінійного руху, і щонайменше одного обертального або коливального руху. ФОРМУЛА ВИНАХОДУ 10 15 20 25 30 35 40 45 50 55 60 1. Установка для обробки зануренням, насамперед фарбування зануренням, предметів, насамперед автомобільних кузовів, яка містить а) щонайменше одну заглибну ванну, що виконана з можливістю заповнення технологічною рідиною до певного рівня, б) транспортну систему, за допомогою якої предмети, що підлягають обробці, мають можливість переміщення до заглибної ванни, у неї, з неї й від неї, і яка має напрямний пристрій, а також щонайменше один виконаний з можливістю переміщення уздовж напрямного пристрою транспортний візок, що, у свою чергу, містить: ба) привідний двигун для траверсного переміщення уздовж напрямного пристрою, бб) утримувальну раму, що виконана з можливістю закріплення на ній щонайменше одного предмета, бв) занурювальний пристрій, який має щонайменше одну вісь обертання або повороту, на якому закріплена утримувальна рама, в) керуючий пристрій, в якому записана задана траєкторія занурення закріпленого на утримувальній рамі предмета і який керує рухом закріпленого на утримувальній рамі предмета, яка відрізняється тим, що г) передбачена система запобігання зіткненням, що містить: га) для кожного можливого ступеня вільності руху закріпленого на утримувальній рамі (212) предмета (204) датчик (274, 275, 276) вимірювання положення, що вимірює абсолютне значення, гб) запам'ятовувальний пристрій, в якому збережена траєкторія першої граничної поверхні або граничної лінії (270), що відображає траєкторію твердої структури уздовж траєкторії руху предмета (204), гв) запам'ятовувальний пристрій, в якому збережена траєкторія другої граничної поверхні або граничної лінії (271), що проходить на відстані від першої граничної поверхні або граничної лінії (270), при цьому між першою граничною поверхнею або граничною лінією (270) і другою граничною поверхнею або граничною лінією (271) утворена зона (272) захисту від зіткнень, гг) запам'ятовувальний пристрій, в якому збережена траєкторія контуру (273), що представляє траєкторію контуру закріпленого на утримувальній рамі (212) предмета (204), при цьому д) керуючий пристрій (232) на підставі положення сигналів, що надходять у нього від датчиків (274, 275, 276) вимірювання, і збережених даних про траєкторію другої граничної поверхні або граничної лінії (271), а також про контур (273), що представляє закріплений на утримувальній рамі (212) предмет (204), постійно або через певні проміжки часу обчислює, чи ввійшов контур (273) у зону (272) захисту від зіткнень чи ні, і у першому випадку зупиняє подальший рух предмета (204). 2. Установка за п. 1, яка відрізняється тим, що керуючий пристрій (232) переміщається на транспортному візку (208). 3. Установка за п. 1 або п. 2, яка відрізняється тим, що передбачений пристрій (274', 275', 277, 278) верифікації, що верифікує коректне функціонування датчиків (274, 275, 276) вимірювання положення. 4. Установка за п. 3, яка відрізняється тим, що пристрій (274', 275', 277, 278) верифікації щонайменше для однієї частини датчиків (274, 275) вимірювання положення має дублюючий аналогічний датчик (274', 275') вимірювання положення. 5. Установка за п. 3 або п. 4, яка відрізняється тим, що пристрій (274', 275', 277, 278) верифікації щонайменше для частини датчиків (276) вимірювання положення має стаціонарний пристрій (277, 278), повз якого закріплений на утримувальній рамі (212) предмет (204) проводиться щонайменше один раз, де його положення визначається незалежно. 6. Установка за п. 5, яка відрізняється тим, що стаціонарний пристрій містить щонайменше один фоторелейний бар'єр (277, 278). 7. Установка за одним із попередніх пунктів, яка відрізняється тим, що ширина зони (272) захисту від зіткнень є функцією швидкості предмета (204). 7 UA 102605 C2 8. Установка за одним із попередніх пунктів, яка відрізняється тим, що передбачений автоматично працюючий пристрій визначення типу кузова. 8 UA 102605 C2 9 UA 102605 C2 10 UA 102605 C2 Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Назва патенту англійськоюLine for dip coating
Автори англійськоюRockle, Jurgen
Назва патенту російськоюУстановка для обработки погружением
Автори російськоюРьокле Йюрген
МПК / Мітки
МПК: B05C 3/00, B65G 49/00
Мітки: обробки, установка, зануренням
Код посилання
<a href="https://ua.patents.su/13-102605-ustanovka-dlya-obrobki-zanurennyam.html" target="_blank" rel="follow" title="База патентів України">Установка для обробки зануренням</a>
Установка для обробки зануренням
Номер патенту: 99166
Опубліковано: 25.07.2012
Автори: Гонсалес Вікто Уго Барраган, Альбек Себастіан, Ханф Йюрген, Еспіноса Антоніо Белісаріо Дуран, Роббін Йорг
МПК: B65G 49/00
Мітки: обробки, зануренням, установка
Формула / Реферат:
1. Установка для обробки зануренням автомобільних кузовів за) щонайменше однією заглибною ванною (2; 102; 202), яка виконана з можливістю наповнення обробною рідиною, в яку можуть бути повністю занурені автомобільні кузови (3; 103; 204), які підлягають обробці;б) транспортною системою (4; 104; 206), яка може подавати автомобільні кузови (3; 103; 204), які підлягають обробці, до заглибної ванни (2; 102; 202), повністю у...
Система підвісної дороги й установка для обробки зануренням з такою системою
Номер патенту: 99179
Опубліковано: 25.07.2012
Автор: Роббін Йорг
МПК: B05C 3/00, B65G 49/00
Мітки: установка, такою, підвісної, обробки, система, дороги, системою, зануренням
Формула / Реферат:
1. Система підвісної дороги для транспортування об'єктів, насамперед для транспортування автомобільних кузовів, в установці по обробці поверхонь за) щонайменше одним транспортним візком (208), що містить у собі кріпильний пристрій (212, 272), на якому передбачена можливість закріплення щонайменше одного об'єкта (204);б) щонайменше однією несучою транспортний візок (208) напрямною (216);в) щонайменше одним приводним...
Установка для нанесення покриття на металевий виріб зануренням у розплав
Номер патенту: 78891
Опубліковано: 25.04.2007
Автори: Беренс Хольгер, Брісбергер Рольф, Фалькенхан Бодо, Тенькхофф Бернхард, Ціленбах Міхель
МПК: C23C 2/00
Мітки: зануренням, нанесення, розплав, установка, металевій, покриття, виріб
Формула / Реферат:
1. Установка для нанесення покриття на металевий виріб (1), зокрема на сталеву штабу, зануренням у розплав, в якій металевий виріб (1) проходить по вертикалі через ємність (3), що містить розплавлений метал (2) покриття, і розташований перед ємністю напрямний канал (4), при цьому по обидві сторони від металевого виробу (1) у зоні напрямного каналу (4) передбачені щонайменше два індуктори (5), що створюють електромагнітне поле, яке утримує...
Пристрій для обробки поверхні матеріалу зануренням та спосіб обробки поверхні матеріалу
Номер патенту: 59392
Опубліковано: 15.09.2003
Автори: Брендель Ґергард, Фукс Рудольф, іллебранд Ернст-Вальтер
МПК: C25D 17/06, B65G 49/00
Мітки: поверхні, матеріалу, обробки, зануренням, пристрій, спосіб
Формула / Реферат:
1. Пристрій для обробки поверхні матеріалу, який містить резервуар (1) для занурення, транспортер зі східчастими стелажами (16), елементи (10) обробки, стаціонарно встановлені між східцями стелажів, причому східчастий стелаж виконаний з розташованими на відстані один від одного кронштейнами (19) та піднімальними полозками (17), встановленими з можливістю вертикального переміщення у встановлених із можливістю горизонтального переміщення...
Спосіб безперервного гарячого покривання металевої стрічки зануренням у рідкий метал та установка для його здійснення
Номер патенту: 74223
Опубліковано: 15.11.2005
Автори: Гаше Лоран, Дошель Дід'є, Пріжан Ів, Люка Патріс, Боден Юг
МПК: B05C 3/02, C23C 2/00, C23C 2/14, C23C 2/06
Мітки: рідкий, спосіб, стрічки, зануренням, покривання, безперервного, здійснення, гарячого, установка, метал, металевої
Формула / Реферат:
1. Спосіб безперервного гарячого покривання металевої стрічки (1) зануренням у рідкий метал у баці (11), що містить ванну (12) рідкого металу, за яким металеву стрічку (1) пропускають у безперервному режимі й у захисному середовищі через кожух (13), нижня частина (13а) якого занурена у ванну (12) рідкого металу для визначення разом з поверхнею ванни усередині даного кожуха (13) рідкого герметичного прошарку (14), металеву стрічку (1)...
Попередній патент: Пристрої і способи підвищення місткості для бездротового зв’язку
Наступний патент: Спосіб одержання активованого вугілля
Випадковий патент: Спосіб визначення зашлакованості металургійного скрапу