Судновий двигуно-рушійний комплекс
Формула / Реферат
Судновий двигуно-рушійний комплекс, який включає редуктор з двома вихідними контробертальними коаксіальними валами, лопаті гребних гвинтів з гідравлічними кутами ![]() , оптимальні розміри яких регламентуються розрахунком тяги, рушійного (тягового) ККД, підйомної сили лопатей гребних гвинтів, який відрізняється тим, що має редуктор з двома вихідними коаксіальними валами узгодженого (в одному напрямку) обертання, жорстко зв'язаними з першим та другим гребними гвинтами 1, 2, лопаті котрих мають гідравлічні кути
, оптимальні розміри яких регламентуються розрахунком тяги, рушійного (тягового) ККД, підйомної сили лопатей гребних гвинтів, який відрізняється тим, що має редуктор з двома вихідними коаксіальними валами узгодженого (в одному напрямку) обертання, жорстко зв'язаними з першим та другим гребними гвинтами 1, 2, лопаті котрих мають гідравлічні кути ![]() , розташовані узгоджено (в одному напрямку), при цьому перший гребний гвинт жорстко зв'язаний з вихідним коаксіальним валом 3 редуктора, на протилежному кінці якого жорстко встановлено зубчасте колесо 6, яке через проміжні зубчасті колеса 8, 10, жорстко встановлені на проміжному валу 11 редуктора, зв'язано через ведуче зубчасте колесо 12 з привідним валом 13 редуктора, а другий по ходу потоку гребний гвинт жорстко зв'язаний з внутрішнім вихідним валом 4 редуктора, на протилежному кінці якого жорстко встановлено зубчасте колесо 7, яке через проміжні зубчасті колеса 9, 10, жорстко встановлені на проміжному валу 11 редуктора, зв'язано з ведучим зубчастим колесом 12 та привідним валом 13 редуктора, при цьому передаточні відношення зубчастих коліс редуктора забезпечують збільшення обертів гребних гвинтів по ходу потоку їх, узгоджене з заданим законом обертання, при якому гідравлічні кути лопатей гребних гвинтів забезпечують закручування потоку в зоні прискореного потоку протилежно напряму обертання з осьовим напрямом тяги на другому гребному гвинті, а розрахунок тяги, рушійного (тягового) ККД та підйомної сили лопатей гребних гвинтів виконується за формулами:
, розташовані узгоджено (в одному напрямку), при цьому перший гребний гвинт жорстко зв'язаний з вихідним коаксіальним валом 3 редуктора, на протилежному кінці якого жорстко встановлено зубчасте колесо 6, яке через проміжні зубчасті колеса 8, 10, жорстко встановлені на проміжному валу 11 редуктора, зв'язано через ведуче зубчасте колесо 12 з привідним валом 13 редуктора, а другий по ходу потоку гребний гвинт жорстко зв'язаний з внутрішнім вихідним валом 4 редуктора, на протилежному кінці якого жорстко встановлено зубчасте колесо 7, яке через проміжні зубчасті колеса 9, 10, жорстко встановлені на проміжному валу 11 редуктора, зв'язано з ведучим зубчастим колесом 12 та привідним валом 13 редуктора, при цьому передаточні відношення зубчастих коліс редуктора забезпечують збільшення обертів гребних гвинтів по ходу потоку їх, узгоджене з заданим законом обертання, при якому гідравлічні кути лопатей гребних гвинтів забезпечують закручування потоку в зоні прискореного потоку протилежно напряму обертання з осьовим напрямом тяги на другому гребному гвинті, а розрахунок тяги, рушійного (тягового) ККД та підйомної сили лопатей гребних гвинтів виконується за формулами:
R = (P*НсрFНср-PCFC).n, при VП = 0,
R' = (P*'НсрF'Нср-P'CF'C).n, при VП > 0,
де ![]()
FHcp = t1.1, при VП = 0,
Fc = t.1, при VП = 0,
F'Нср = t'1.1, при VП > 0,
F'C = t'.1, при VП > 0,
![]() , при VП = 0,
, при VП = 0,
![]() , при VП > 0,
, при VП > 0,
P = R•Sin![]() = (P*НсрFНср - PC • FC) •n•Sin
= (P*НсрFНср - PC • FC) •n•Sin![]() , при VП = 0,
, при VП = 0,
P' = R'•Sin![]() ' = (P*'НсрF'Нср - P'C • F'C) •n•Sin
' = (P*'НсрF'Нср - P'C • F'C) •n•Sin![]() ', при VП > 0,
', при VП > 0,
де VП - швидкість переміщення, руху (переносна швидкість),
R - тяга другого гребного гвинта при VП = 0,
R'- тяга другого гребного гвинта при VП > 0,
P*Нср- статичний тиск у середньому перерізі водно-газодинамічного тракту лопаті другого гребного гвинта в зоні К-С2 при VП = 0, приведений до зони спокійного потоку Н,
FНср - площа водно-газодинамічного тракту у середньому перерізі Г зони К-С2 лопаті другого гребного гвинта при VП = 0.
t1 - товщина водно-газодинамічного тракту у середньому перерізі Г лопаті другого гребного гвинта при VП = 0,
l - довжина лопаті другого гребного гвинта,
P*НсрFНср - середня, приведена до зони спокійного потоку Н, рушійна сила від зміни статичного тиску в зоні К-С2 лопаті другого гребного гвинта при VП = 0,
РC - статичний тиск у вихідному перерізі С2 водно-газодинамічного тракту лопаті другого гребного гвинта при VП = 0,
FC - площа водно-газодинамічного тракту у вихідному перерізі С2 лопаті другого гребного гвинта при VП = 0,
t - товщина водно-газодинамічного тракту у вихідному перерізі С2 лопаті другого гребного гвинта при VП = 0,
PCFC - сила опору статичного тиску у вихідному перерізі С2 лопаті другого гребного гвинта при VП = 0,
n - кількість лопатей другого гребного гвинта,
Р*'Нср - статичний тиск у середньому перерізі Г зони К-С2 лопаті другого гребного гвинта при VП > 0, приведений до зони спокійного потоку Н,
F'Нср - площа водно-газодинамічного тракту в середньому перерізі Г зони К-С2 лопаті другого гребного гвинта при VП > 0, приведена до зони спокійного потоку Н,
t'1 - товщина водно-газодинамічного тракту у середньому перерізі Г зони К-С2 лопаті другого гребного гвинта при VП > 0.
Р*'НсрF'Нср - середня, приведена до зони спокійного потоку Н, рушійна сила від зміни статичного тиску в зоні К-С2 лопаті другого гребного гвинта при VП > 0,
![]() - зниження чи прирощення статичного тиску у середньому перерізі Г водно-газодинамічного тракту в зоні К-С2 лопаті другого гребного гвинта при VП > 0,
- зниження чи прирощення статичного тиску у середньому перерізі Г водно-газодинамічного тракту в зоні К-С2 лопаті другого гребного гвинта при VП > 0,
Р'C - статичний тиск у вихідному перерізі С2 водно-газодинамічного тракту лопаті другого гребного гвинта при VП > 0,
F'C - площа водно-газодинамічного тракту у вихідному перерізі С2 лопаті другого гребного гвинта при VП > 0,
t' - товщина водно-газодинамічного тракту у вихідному перерізі С2 лопаті другого гребного гвинта при VП > 0,
P'CF'C - сила опору статичного тиску у вихідному перерізі С2 водно-газодинамічного тракту лопаті другого гребного гвинта при VП > 0,
![]() - тяговий ККД другого гребного гвинта при VП = 0,
- тяговий ККД другого гребного гвинта при VП = 0,
![]() - рушійний (тяговий) ККД другого гребного гвинта при VП > 0,
- рушійний (тяговий) ККД другого гребного гвинта при VП > 0,
Р - підйомна сила лопатей другого гребного гвинта при VП = 0,
Р' - підйомна сила лопатей другого гребного гвинта при VП > 0,
![]() - кут між напрямком тяги R та віссю гребного гвинта на епюрі при VП = 0,
- кут між напрямком тяги R та віссю гребного гвинта на епюрі при VП = 0,
![]() ' - кут між напрямком тяги R' та віссю гребного гвинта на епюрі при VП > 0.
' - кут між напрямком тяги R' та віссю гребного гвинта на епюрі при VП > 0.
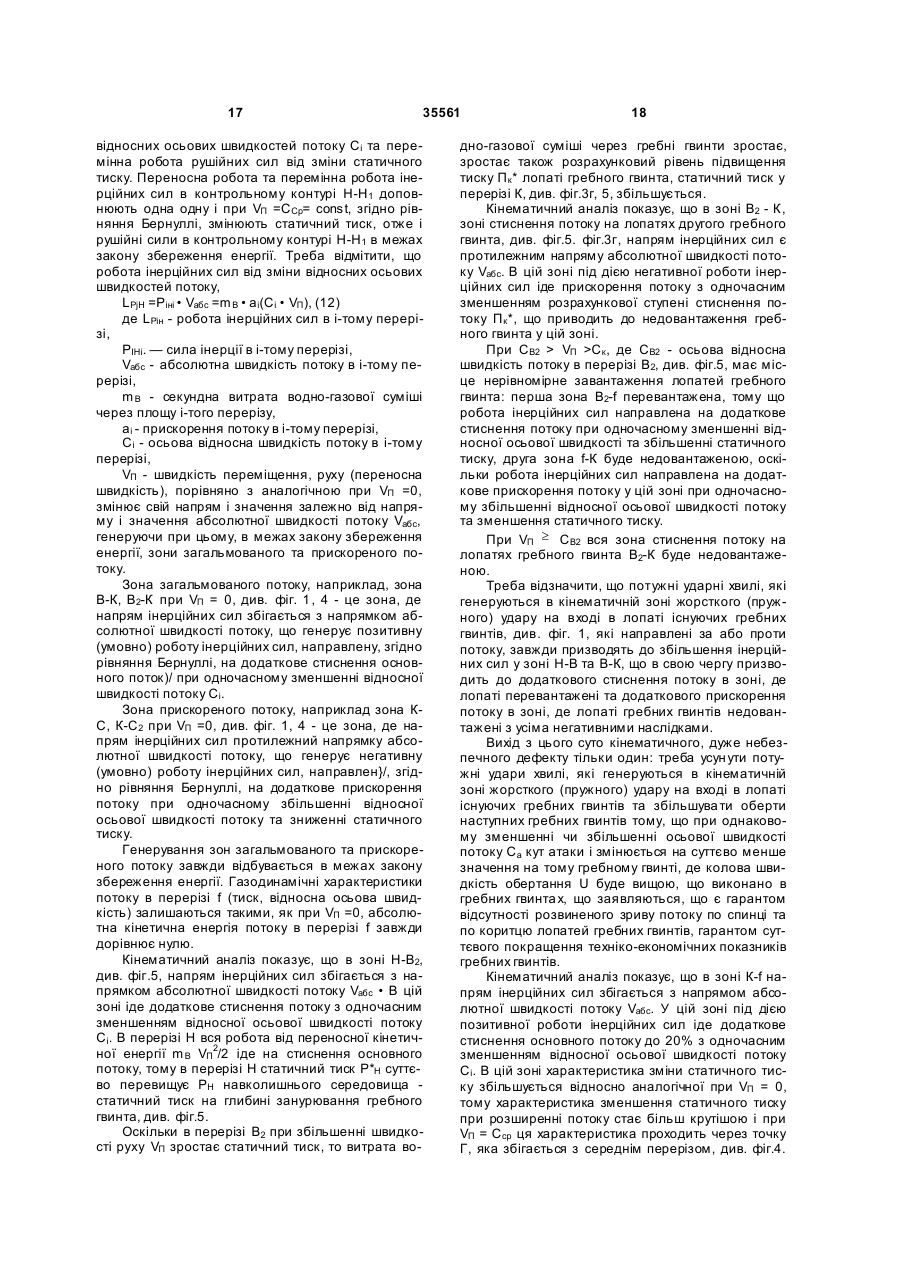
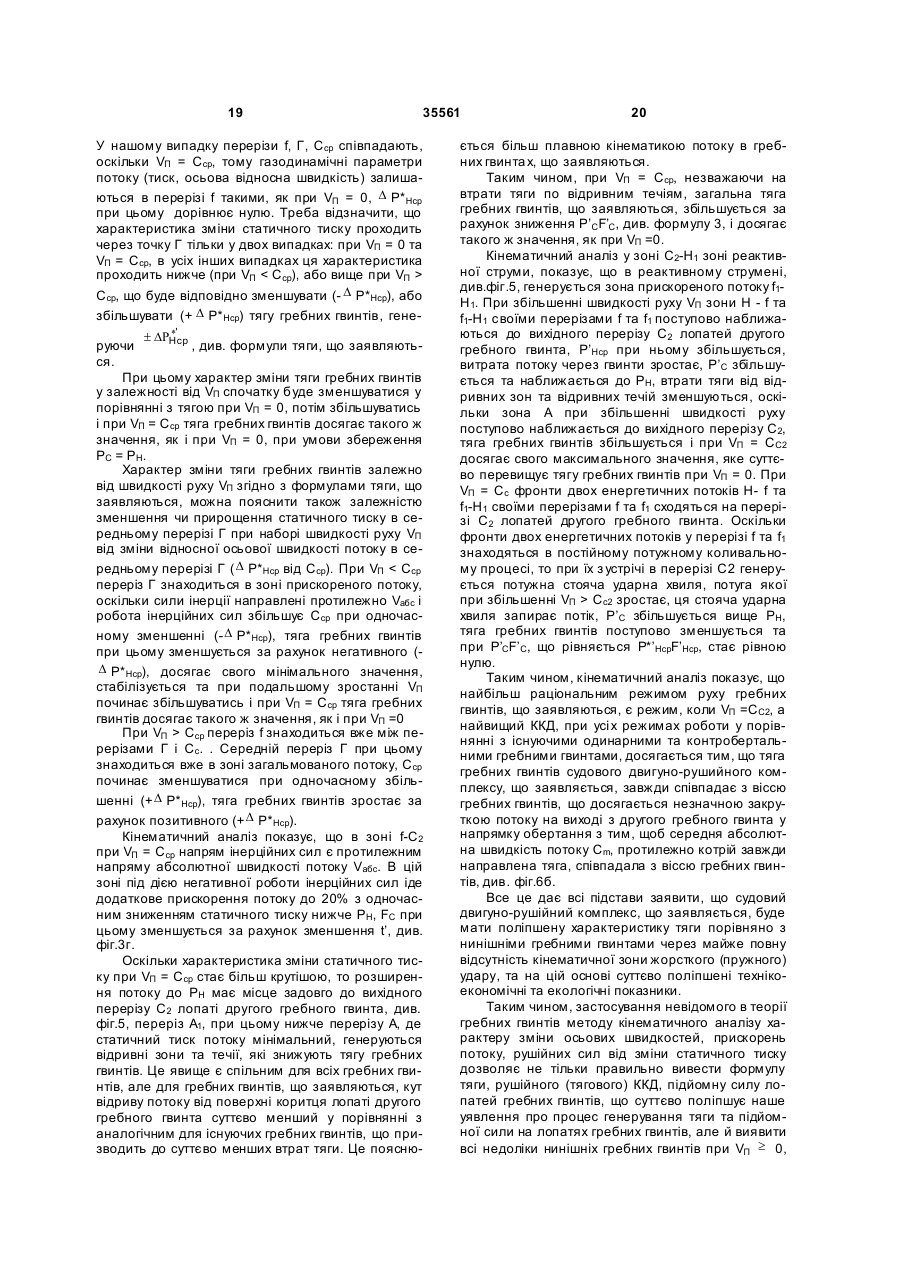
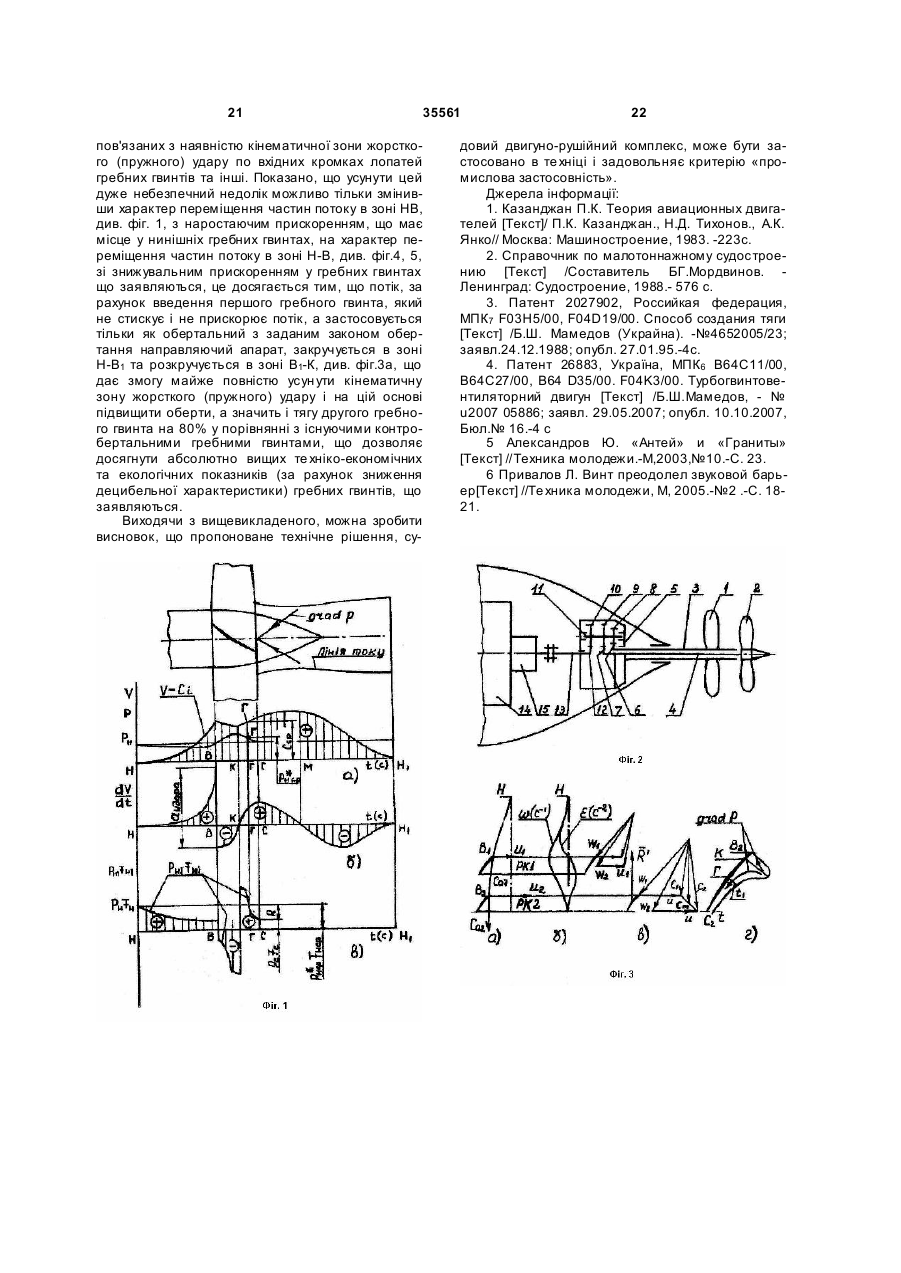
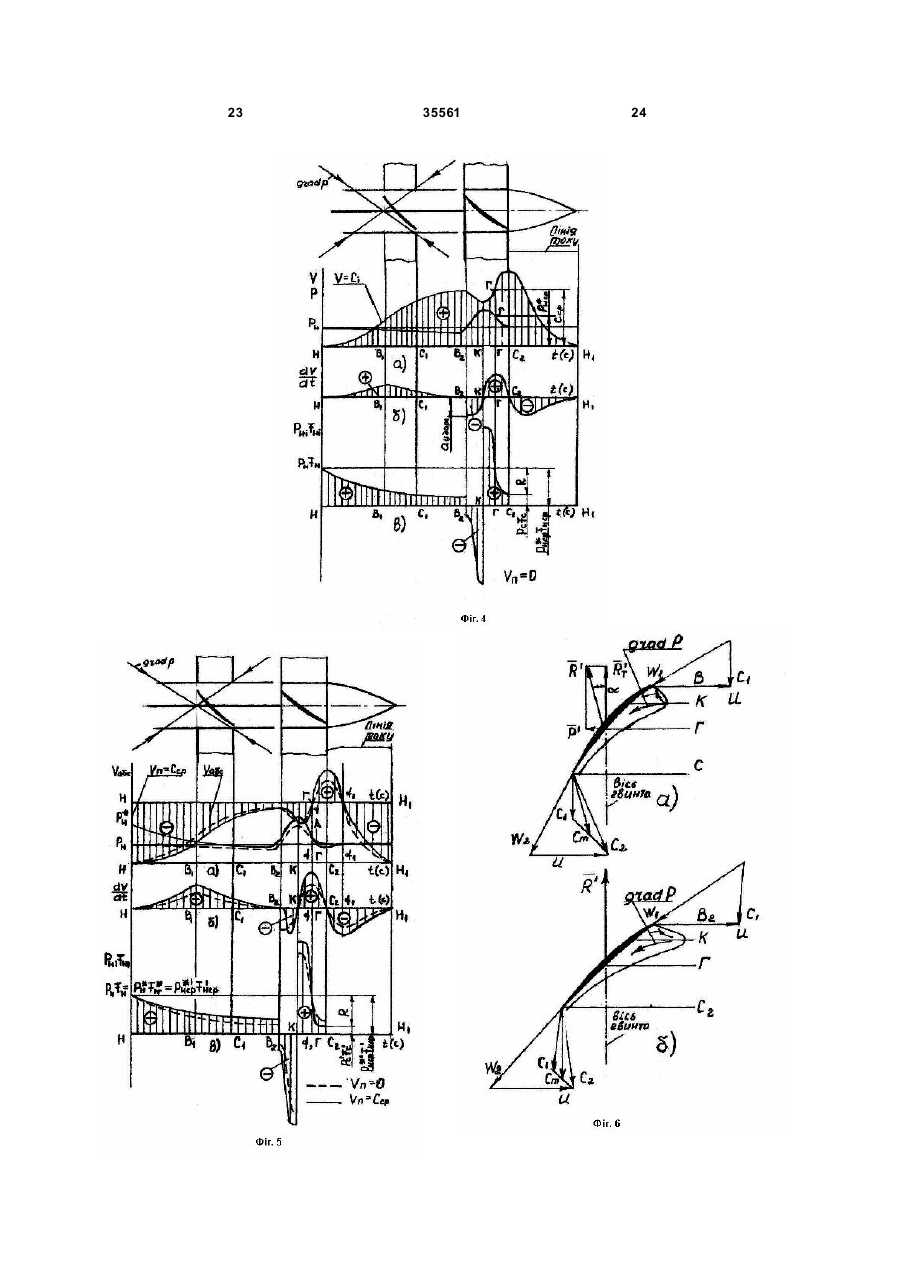
Текст
УКРАЇНА (19) UA (11) 35561 (13) U (51) МПК (2006) B63H 1/14 (2008.01) B63H 1/28 (2008.01) B63H 5/00 МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ДЕРЖАВНИЙ Д ЕПАРТАМЕНТ ІНТЕЛ ЕКТУАЛЬНОЇ ВЛАСНОСТІ ОПИС в идається під в ідпов ідальність в ласника патенту ДО ПАТЕНТУ НА КОРИСНУ МОДЕЛЬ (54) СУДНОВИЙ ДВИГУНО-РУШІЙНИЙ КОМПЛЕКС 1 *' * * де RНср = RНср ± DRНср . FHcp = t 1 1, при VП = 0, Fc = t .1, при VП = 0, F'Нср = t' 1.1, при VП > 0, F'C = t'.1, при VП > 0, (13) 35561 (11) UA æ R' C F' C ö ÷ ´ 100% , при V > 0, h П = ç1П ç *' ÷ RНсрF' Нср ø è P = R•Sin a = (P*НсрFНср - PC • FC) •n•Sin a , при VП = 0, P' = R'•Sin a ' = (P*'Нср F'Нср - P'C • F'C) •n•Sin a ', при VП > 0, де VП - швидкість переміщення, руху (переносна швидкість), R - тяга другого гребного гвинта при VП = 0, R'- тяга другого гребного гвинта при VП > 0, P*Нср- статичний тиск у середньому перерізі водногазодинамічного тракту лопаті другого гребного гвинта в зоні К-С2 при VП = 0, приведений до зони спокійного потоку Н, FНср - площа водно-газодинамічного тракту у середньому перерізі Г зони К-С 2 лопаті другого гребного гвинта при VП = 0. t1 - товщина водно-газодинамічного тракту у середньому перерізі Г лопаті другого гребного гвинта при VП = 0, l - довжина лопаті другого гребного гвинта, P*НсрFНср - середня, приведена до зони спокійного потоку Н, рушійна сила від зміни статичного тиску в зоні К-С 2 лопаті другого гребного гвинта при VП = 0, РC - статичний тиск у ви хідному перерізі С2 водногазодинамічного тракту лопаті другого гребного гвинта при VП = 0, FC - площа водно-газодинамічного тракту у ви хідному перерізі С 2 лопаті другого гребного гвинта при VП = 0, t - товщина водно-газодинамічного тракту у ви хідному перерізі С 2 лопаті другого гребного гвинта при VП = 0, U æ RCFC ö ÷ ´ 100% , при V = 0, h T = ç1 П ç * ÷ RНсрFНср ø è (19) (21) u200805116 (22) 21.04.2008 (24) 25.09.2008 (46) 25.09.2008, Бюл.№ 18, 2008 р. (72) МАМЕДОВ БОРИС ШАМШАДОВИЧ, U A (73) ЗАПОРІЗЬКИЙ НАЦІОН АЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ, UA (57) Судновий двигуно-рушійний комплекс, який включає редуктор з двома вихідними контробертальними коаксіальними валами, лопаті гребних гвинтів з гідравлічними кутами b 1 , оптимальні розміри яких регламентуються розрахунком тяги, рушійного (тягового) ККД, підйомної сили лопатей гребних гвинтів, який відрізняє ться тим, що має редуктор з двома вихідними коаксіальними валами узгодженого (в одному напрямку) обертання, жорстко зв'язаними з першим та другим гребними гвинтами 1, 2, лопаті котрих мають гідравлічні кути b 1 , розташовані узгоджено (в одному напрямку), при цьому перший гребний гвинт жорстко зв'язаний з вихідним коаксіальним валом 3 редуктора, на протилежному кінці якого жорстко встановлено зубчасте колесо 6, яке через проміжні зубчасті колеса 8, 10, жорстко встановлені на проміжному валу 11 редуктора, зв'язано через ведуче зубчасте колесо 12 з привідним валом 13 редуктора, а другий по ходу потоку гребний гвинт жорстко зв'язаний з внутрішнім вихідним валом 4 редуктора, на протилежному кінці якого жорстко встановлено зубчасте колесо 7, яке через проміжні зубчасті колеса 9, 10, жорстко встановлені на проміжному валу 11 редуктора, зв'язано з ведучим зубчастим колесом 12 та привідним валом 13 редуктора, при цьому передаточні відношення зубчастих коліс редуктора забезпечують збільшення обертів гребних гвинтів по ходу потоку їх, узгоджене з заданим законом обертання, при якому гідравлічні кути лопатей гребних гвинтів забезпечують закручування потоку в зоні прискореного потоку протилежно напряму обертання з осьовим напрямом тяги на другому гребному гвинті, а розрахунок тяги, рушійного R = (P*Нср Нср-P та ).n, при V = 0, (тягового)FККД CFCпідйомної Псили лопатей гребних R' = (P*'НсрF'Нс р-P'CF' за формулами: гвинтів виконується C).n, при VП > 0, 2 3 35561 PCFC - сила опору статичного тиску у ви хідному перерізі С2 лопаті другого гребного гвинта при VП = 0, n - кількість лопатей другого гребного гвинта, Р*'Нср - ста тичний тиск у середньому перерізі Г зони К-С 2 лопаті другого гребного гвинта при VП > 0, приведений до зони спокійного потоку Н, F'Нср - площа водно-газодинамічного тракту в середньому перерізі Г зони К-С 2 лопаті другого гребного гвинта при VП > 0, приведена до зони спокійного потоку Н, t'1 - товщина водно-газодинамічного тракту у середньому перерізі Г зони К-С 2 лопаті другого гребного гвинта при VП > 0. Р*'НсрF'Нср - середня, приведена до зони спокійного потоку Н, рушійна сила від зміни статичного тиску в зоні К-С 2 лопаті другого гребного гвинта при VП > 0, *' ± DRНср - зниження чи прирощення статичного тиску у середньому перерізі Г водногазодинамічного тракту в зоні К-С 2 лопаті другого гребного гвинта при VП > 0, Корисна модель відноситься до галузі суднобудування. З теорії гребних гвинтів відомо, що підйомна сила ізольованого профілю розраховується за формулою, див. [1], с.53: R = rw¥ G, (1) де Р - підйомна сила ізольованого профілю, r - щільність водно-газового потоку (далі потоку), w ¥ - швидкість потоку в нескінченності (перед і за профілем однакова), Г - циркуляція швидкості потоку навколо профілю. Першим головним недоліком формули (1) є те, що вона не відображає реальний процес генерування тяги гребними гвинтами, оскільки відомо, що первинним явищем є зміна рушійних сил від зміни статичного тиску водно-газового потоку, вторинним явищем є зміна швидкості потоку, яка генерує інерційні (динамічні) сили, тому формулу тяги гребних гвинтів треба виводити тільки із первинного явища - зміни рушійних сил від зміни статичного тиску, оскільки швидкість потоку ніколи не генерує тягу, так як інерційні (динамічні) сили у межах контрольного контуру Н-Н 1, див. фіг. 1 та інші, завжди взаємно знищують одна одну, тобто їх загальна сума у межах контрольного контур у Н-Н 1 завжди дорівнює нулю. Другим головним недоліком формули (і) є неточне відображення фізичної основи процесу генерування підйомної сили одиночного профілю, оскільки,, згідно формули (1), максимальний тиск потоку на коритце профілю, що продувається, знаходиться там, де циркуляція ( t × D Wu ), див. [1], 4 Р'C - статичний тиск у вихідному перерізі С2 водногазодинамічного тракту лопаті другого гребного гвинта при VП > 0, F'C - площа водно-газодинамічного тракту у ви хідному перерізі С 2 лопаті другого гребного гвинта при VП > 0, t' - товщина водно-газодинамічного тракту у ви хідному перерізі С 2 лопаті другого гребного гвинта при VП > 0, P'CF'C - сила опору статичного тиску у вихідному перерізі С 2 водно-газодинамічного тракту лопаті другого гребного гвинта при VП > 0, h T - тяговий ККД другого гребного гвинта при VП = 0, h P - рушійний (тяговий) ККД другого гребного гвинта при VП > 0, Р - підйомна сила лопатей другого гребного гвинта при VП = 0, Р' - підйомна сила лопатей другого гребного гвинта при VП > 0, a - кут між напрямком тяги R та віссю гребного гвинта на епюрі при VП = 0, a ' - кут між напрямком тяги R' та віссю гребного гвинта на епюрі при VП > 0. С.54, максимальна, тобто на вихідній кромці профілю, що є повним порушенням усіх, без винятку, законів механіки течій рідин та газів, котрі, згідно експериментальної частини сучасної теорії повітряно-реактивних двигунів, показують, що максимальний тиск потоку на коритце профілю, що продувається, знаходиться в зоні вхідної кромки, показують, що при продувці характер розподілу статичного тиску по коритцю профілю має вигляд, представлений в [1] на с. 68, рис. 3.3, а також в [4] на с 19, фіг. 1, на с 21, фіг.3г, тобто по коритцю профілю, що продувається, генерується зона загальмованого потоку В-С, див. фіг. 1 -6, котра складається із зони стиснення потоку В-К і зони прискореного потоку К-С, котра, як показує кінематичний аналіз, є реактивним соплом профілю, що продувається, в якому генерується тяга. Тяга профілю, що продувається, завжди направлена протилежно вектору середньої абсолютної швидкості потоку С m, див. фіг. 6а, утворюючи гострий кут a з віссю гребного гвинта на епюрі, коли тяга направлена не по осі гвинта. Розклад вектора тяги R або R на вертикальну RT або R'T і горизонтальну Р або Р' складові дає величину і напрямок підйомної сили профілю Р або Р’, які розраховуються за формулами (6, 7). Таким чином, зона прискореного потоку К-С первинно утворює тягу профілю, що продувається, удр уге підйомну силу, яка є функцією від тяги та кута а згідно формул (6, 7). При a , який дорівнює нулю, ККД гвинта буде найвищий, оскільки тяга R або R' при цьому направлена по вісі гвинта, див. фіг. 6б. Головні недоліки формули (1) пояснюється тим, що при ії виводі не було проведено: 5 35561 1. Кінематичного аналізу характеру зміни осьових швидкостей та прискорень потоку у межах контрольного контуру Н-Н 1 при VП ³ 0. 2. Кінематичного аналізу характеру змін рушійних сил від зміни статичного тиску потоку у межах контрольного контуру Н-Н1 при VП ³ 0. 3. Не були враховані зони загальмованого та прискореного потоку у межах контрольного контуру Н-Н1, при VП ³ 0. Відомі різноманітні судові двигуно-рушійні комплекси, які включають двигун, редуктор (коробку швидкостей), одинарний гребний вал, одинарний гребний гвинт, кінематичні схеми яких приведені в [2] на с.501. Конструктивними недоліками одинарних гребних гвинтів (рушіїв ци х комплексів) є наявність по вхідній кромці лопатей кінематичної зони жорсткого (пружного) удару, див. фіг. 16 заявки, що заявляється, яка лімітує гідродинамічне навантаження на лопаті гребного гвинта, максимальні оберти (максимальну колову швидкість U) та осьову абсолютну швидкість потоку С a,. наступними конструктивними недоліками гребних гвинтів є закрутка потоку на виході з лопатей гребного гвинта, при котрій тяга, яка завжди протилежна середній абсолютній швидкості потоку С m, див. фі г 6а, утворює кут a з віссю гвинта, знижуючи його ККД, підвищена децибельна характеристика, дуже мала колова швидкість U, низькі техніко-економічні показники (питома тяга, питома маса, питома витрата палива). На фіг. 1а заявки, що заявляється, зображено кінематичний аналіз характеру зміни осьових швидкостей та статичного тиску потоку в контрольному контурі Н-Н 1 гребного гвинта. На фіг. 16 заявки, що заявляється, зображено кінематичний аналіз характеру зміни осьових прискорень потоку в контрольному контурі Н-Н 1 який створюється на основі графічного диференціювання графіка характеру зміни осьових швидкостей в контрольному контурі Н-Н 1 показано, що в зоні Н-В потік переміщується з наростаючим прискоренням, tg a збільшується та має позитивне значення, показано, що по вхідній кромці лопатей гребного гвинта, переріз В, tg a миттєво змінює свій знак, що є свідоцтвом наявності в цьому перерізі кінематичної зони жорсткого (пружного) удару, який генерує потужні ударні хвилі у коливальному режимі, які розповсюджуються по усім напрямкам однаково. Потужні ударні хвилі у коливальному режимі , які направлені проти потоку, гальмують останній, що призводить до знижування осьової швидкості потоку Сa, що призводить до збільшення кутів атаки вище (5-7)°, розвиненому зриву потоку зі спинок лопатей, загубленню тягової потуги гребного гвинта. Потужні ударні хвилі у коливальному режимі, направлені за потоком, збільшують інерційні сили в зоні стиснення потоку В-К, див. фіг.1 заявки, що заявляється, що призводить до додаткового стиснення потоку у цій зоні, додаткового знижування осьової швидкості Ci, яке призводить до перевантаження лопатей гребного гвинта в зоні В-К та додаткового збільшення потуги удар у з усіма негативними наслідками, включаючи збільшення де 6 цибельної характеристики. Потужні ударні хвилі, направлені за потоком, знижують інерційні сили (сили опору) в зоні прискореного потоку К-С, що призводить до додаткового прискорення потоку в цій зоні, додаткового збільшення осьової швидкості потоку Ci при одночасному зниженні статичного тиску, що призводить до недовантаження лопатей гребних гвинтів у цій зоні, що разом з перевантаженням лопатей у зоні В-К змінює гідродинамічне навантаження на лопать гребного гвинта при VП >0, що призводить до підвищеної вібрації лопатей, зниженню їх гідродинамічної стійкості роботи, поломки лопатей гребного гвинта. На фіг. 1в заявки, що заявляється, зображено кінематичний аналіз характеру зміни рушійних сил від зміни статичного тиску в контрольному контурі Н-Н1 гребного гвинта. Таким чином, наявність кінематичної зони жорсткого (пружного) удару на вхідних кромках лопатей гребного гвинта, див. фіг.1 заявки, що заявляється, лімітує гідродинамічне навантаження на лопаті гребного гвинта, максимальні оберти (максимальну колову швидкість U) та осьову швидкість потоку С а, ви ще яких наступає нестійка робота гребного гвинта, при цьому потуга ударних хвиль у коливальному режимі, які генеруються в кінематичній зоні жорсткого (пружного) удару, напрямки залежить від щільності потоку при VП ³ 0 (низька температура води, підвищений атмосферний тиск, глибина занурювання гребного гвинта та інші). Кінематичний аналіз характеру зміни осьових швидкостей, статичного тиску, прискорень потоку, рушійних змін від зміни статичного тиску, приведений на фіг. 1, 4, 5, для гребних гвинтів проводиться вперше, оскільки в теорії гребних гвинтів він абсолютно невідомий, невідомим також є вірне уявлення процесу генерування тяги на лопатях гребних гвинтів, оскільки всі існуючі формули для розрахунку тяги неточні. Відомі також повітряні гвинти за патентом №2027902, [3], в якому три робочих колеса повітряних гвинтів обертаються супутно при збільшенні їх обертів по ходу потоку. Кінематичний аналіз характеру зміни осьових швидкостей, прискорень потоку ((інерційних-динамічних сил), рушійних сил від зміни сил статичного тиску показує, що процес генерування тяги у повітряних та гребних гвинтах абсолютно однаковий, тому ми застосовуємо спосіб створення тяги який описаний за патентом №2027902 для створення рушіїв нового покоління як для повітряних гвинтів турбогвинтовентиляторного двигуна за патентом України на корисну модель №26883, [4], так і для гребних гвинтів що заявляються у цій заявці на «Судовий двигунорушійний комплекс». Відомим також є судовий двигуно-рушійний комплекс, який включає двигун, редуктор з двома вихідними контробертальними коаксіальними валами, жорстко зв'язаними з двома контробертальними гребними гвинтами, див. [5], с 23, оберти котрих знижуються по ходу потоку, а гідравлічні кути b1 розташовані у протилежних напрямках, який обрано за прототип. 7 35561 Головними конструктивними недоліками існуючих контробертальних гребних гвинтів (р ушіїв) є наявність по вхідній кромці лопатей першого гребного гвинта кінематичної зони жорсткого (пружного) удару, див. фіг.1 заявки, що подається, наявність двох крутих колін зміни абсолютної осьової швидкості потоку (закрутка потоку після першого гребного гвинта, та розкрутка до осьового напрямку на другому контробертальному гребному гвинті), дуже складний редуктор з двома вихідними контробертальними коаксіальними валами, а також зниження обертів гребних гвинтів по ходу потоку, низька колова швидкість U, підвищена децибельна характеристика, низькі техніко-економічні показники (питома тяга, питома маса, питома витрата палива). Всі негативні наслідки від дії потужних ударних хвиль у коливальному режимі, які генеруються в кінематичній зоні жорсткого (пружного) удару по вхідній кромці лопатей першого гребного гвинта такі ж самі, як і для одинарного гребного гвинта. До головних конструктивних недоліків контробертальних гребних гвинтів слід віднести також їх дуже низький ККД, пов'язаний з тим, що тяга, яка утворюється на першому головному тяговому гвинті ніколи не співпадає з віссю гвинта, див. фіг.6а заявки, що заявляється, тяга, яка утворюється на другому контробертальному, теж тяговому гребному гвинті, також ніколи не співпадає з віссю гвинта, незважаючи на осьовий напрям потоку після другого контробертального гребного гвинта. Це пов'язано з тим, що напрямок тяги завжди протилежний середній абсолютній швидкості потоку С m яка утворює гострий кут a з віссю другого контробертального гребного гвинта. В основу корисної моделі поставлено завдання створення принципово нових рушіїв судового двигуно-рушійного комплексу з підвищеними техніко-економічними показниками (питома тяга, питома маса, питома витрата палива) та суттєве зниження децибельної характеристики гребних гвинтів шляхом: - розрахунку тяги, рушійного (тягового) ККД, підйомної сили лопатей гребного гвинта з урахуванням зміни площі та статичного тиску в вихідних перерізах лопатей гребних гвинтів для регламентації їх оптимальних розмірів; - майже повного усунення, до 80%, кінематичної зони жорсткого (пружного) удару по вхідних кромках лопатей другого гребного гвинта, що стискує потік; - майже повного усунення, до 80%, дуже небезпечного кінематичного дефекту, пов'язаного з перевантаженням зони В-К лопатей другого гребного гвинта та недовантаженням їх у зоні К-С, при VП > 0; - підвищення майже у два рази абсолютної осьової швидкості потоку С а на вході в лопаті другого гребного гвинта, що стискує потік, з одночасним підвищенням майже у два рази максимальної колової швидкості U, підвищення статичного тиску в зоні В-К при VП ³ 0 з одночасним збільшенням тяги на 80-300% порівняно з контробертальними гребними гвинтами, оскільки з теорії повітряних гвинтів відомо, що спрофільований повітряний 8 гвинт при коловій швидкості U=2МП збільшує тягу повітряного гвинта на 300-400% порівняно з існуючими дозвуковими одинарними повітряними гвинтами з U=0,9MП, де МП - швидкість звуку у повітрі, див. [6], с. 18-21. При цьому ККД гребних гвинтів, що заявляються, буде найвищий, оскільки напрямок тяги співпадає з віссю гребного гвинта, див. фіг. 6б. Завдання вирішується тим, що судовий двигуно-рушійний комплекс, який включає редуктор з двома вихідними контробертальними коаксіальними валами, лопаті гребних гвинтів з гідравлічними кутами b1 оптимальні розміри яких регламентуються розрахунком тяги, рушійного (тягового) ККД, підйомної сили лопатей гребних гвинтів, який відрізняється тим, що має редуктор з двома вихідними коаксіальними валами узгодженого (в одному напрямку) обертання, жорстко зв'язаних з першим та другим гребними гвинтами 1, 2, лопаті котрих мають гідравлічні кути b1 , розташовані узгоджено (в одному напрямку), при цьому перший гребний гвинт жорстко зв'язаний з вихідним коаксіальним валом 3 редуктора, на протилежному кінці якого жорстко встановлено зубчасте колесо 6, яке через проміжні зубчасті колеса 8. 10, жорстко встановлені на проміжному валу 11 редуктора, зв'язано через ведуче з убчасте колесо 12 з привідним валом 13 редуктора, а другий по ходу потоку гребний гвинт жорстко зв'язаний з внутрішнім вихідним валом 4 редуктора, на протилежному кінці якого жорстко встановлено зубчасте колесо 7, яке через проміжні зубчасті колеса 9, 10, жорстко встановлені на проміжному валу 11 редуктора, зв'язано з ведучим зубчастим колесом 12 та привідним валом 13 редуктора, при цьому передаточні відношення зубчастих коліс редуктора забезпечують збільшення обертів гребних гвинтів по ходу потоку їх узгоджене з заданим законом обертання, при якому гідравлічні кути лопатей гребних гвинтів забезпечують закручування потоку в зоні прискореного потоку протилежно напряму обертання з осьовим напрямом тяги на другому гребному гвинті, а розрахунок тяги, рушійного (тягового) ККД та підйомної сили лопатей гребних гвинтів виконується за формулами: R = (P*НсрFНср-PCFC).n, при VП = 0, R’ = (P*’ НсрF’Нср-P’CF’C).n, при VП > 0, * R*' = R* ± DRНср де Нср Нср . FHcp = t 1 1, при VП = 0, Fc = t .1, при VП = 0, F’Нср = t’1 .1, при VП > 0 , F’C = t’.1, при VП > 0, æ ö R F h T = ç 1- * C C ÷ ´ 100% ç RНсрFНср ÷ è ø , при VП = 0, æ R' F' ö hП = ç 1- *' C C ÷ ´ 100% ç RНсрF'Нср ÷ è ø , при VП > 0, a = (P*НсрFНср - PC • FC) •n•Sin a , при P = R•Sin VП = 0, 9 35561 P’ = R’•Sin a ’ = (P*’НсрF’Нср – P’C • F’ C) •n•Sin a ’, при VП > 0, де VП - швидкість переміщення, руху (переносна швидкість), R - тяга другого гребного гвинта при VП = 0, R'- тяга другого гребного гвинта при VП > 0, Р*Нср- статичний тиск у середньому перерізі водно-газодинамічного тракту лопаті другого гребного гвинта в зоні К-С2 при VП = 0, приведений до зони спокійного потоку Н, FНср - площа водно-газодинамічного тракту у середньому перерізі Г зони К-С 2 лопаті другого гребного гвинта при VП = 0. t1 - товщина водно-газодинамічного тракту у середньому перерізі Г лопаті другого гребного гвинта при VП = 0, 1 - довжина лопаті другого гребного гвинта, Р*Нср,FНср - середня, приведена до зони спокійного потоку Н, рушійна сила від зміни статичного тиску в зоні К-С 2 лопаті другого гребного гвинта при VП = 0, РC - статичний тиск у вихідному перерізі С 2 водно-газодинамічного тракту лопаті друго го гребного гвинта при VП = 0, FC - площа водно-газодинамічної о тракту у вихідному перерізі С 2 лопаті другого гребного гвинта при VП = 0, t - товщина водно-газодинамічного тракту у вихідному перерізі С 2 лопаті другого гребного гвинта при VП = 0, PCFC - сила опору статичного тиску у ви хідному перерізі С 2 лопаті другого гребного гвинта при VП = 0, n - кількість лопатей другого гребного гвинта, Р*’Нср - статичний тиск у середньому перерізі Г зони К-С 2 лопаті другого гребного гвинта при VП > 0, приведений до зони спокійного потоку Н, F’Нср - площа водно-газодинамічного тракту в середньому перерізі Г зони К-С 2 лопаті другого гребного гвинта при VП > 0, приведена до зони спокійного потоку Н, t'1 - товщина водно-газодинамічного тракту у середньому перерізі Г зони К-С 2 лопаті другого гребного гвинта при VП > 0. Р*’НсрF’Нср - середня, приведена до зони спокійного потоку Н, рушійна сила від зміни статичного тиску в зоні К-С2 лопаті другого гребного гвинта при VП > 0, *' ± DRНср - зниження чи прирощення статичного тиску у середньому перерізі Г водногазодинамічного тракту в зоні К-С 2 лопаті другого гребного гвинта при VП > 0, Р'C - статичний тиск у вихідному перерізі С 2 водно-газодинамічного тракту лопаті другого гребного гвинта при VП > 0, F'C - площа водно-газодинамічного тракту у вихідному перерізі С 2 лопаті другого гребного гвинта при VП > 0, T' - товщина водно-газодинамічного тракту у вихідному перерізі С 2 лопаті другого гребного гвинта при VП > 0, P'CF'C -сила опору статичного тиску у ви хідному перерізі С 2 водно-газодинамічного тракту лопаті другого гребного гвинта при VП > 0, 10 h T - тяговий ККД др угого гребного гвинта при VП = 0, h P - рушійний (тяговий) ККД другого гребного гвинта при VП > 0, Р - підйомна сила лопатей другого гребного гвинта при Vn = 0, Р' - підйомна сила лопатей другого гребного гвинта при Vn > 0, a - кут між напрямком тяги R та віссю гребного гвинта на епюрі при Vn = 0, a ’ - кут між напрямком тяги R' та віссю гребного гвинта на епюрі при Vn > 0. Застосування двох гребних гвинтів суп утнього обертання з наростаючими обертами по ходу потоку за допомогою додаткового редуктора призводить до майже повного усунення, до 80%, кінематичної зони жорсткого (пружного) удару в перерізі В2 другого гребного гвинта, що суттєво підіймає стелю по гідродинамічному перевантаженню в зоні В2-К та гідродинамічному недовантаженню в зоні К~С2 лопатей гребного гвинта, суттєво підвищує техніко-економічні показники шляхом збільшення колової швидкості U, абсолютної осьової швидкості Сa, статичного тиску в зоні В2-К водногазодинамічного тракту лопатей другого гребного гвинта, що дає змогу вирішити поставлене завдання. Застосування виведених принципово нових формул тяги, рушійного (тягового) ККД підйомної сили лопатей гребного гвинта повністю відображає всі фізичні явища, які мають місце при роботі гребних гвинтів при VП ³ 0 з урахуванням статичного тиску Р*Нср в середньому перерізі Г зони К-С2 при швидкості руху VП = 0, плоті в середньому перерізі Г водно-газодинамічного тракту зони К-С 2 (FНср), статичного тиску Р*’Нср в середньому перерізі Г водно-газодинамічного тракту зони К-С 2 при VП >0, знижування чи прирощення статичного тиску в середньому перерізі Г водно-газодинамічного тра*' ± DRНср кту зони К-С 2 ( ), залежно від відносної осьової швидкості потоку С'Ср в середньому перерізі Г водно-газодинамічного тракту в зоні К-С 2, сили опору статичного тиску в ви хідному перерізі С2 при VП = 0 (PCFC), та VП > 0 (P’ CF’C). Нові ознаки при взаємодії з відомими ознаками дозволяють отримати наступний теоретичний та те хнічний результат: 1 Виведені принципово нові формули тяги, рушійного (тягового) ККД, підйомної сили лопатей гребних гвинтів, які повністю відображають усі фізичні явища, які мають місце при роботі гребних гвинтів при VП ³ 0. 2 Підвищення Сa перед другим гребним гвинтом на 80% шляхом введення закрутки потоку в зоні Н-В1 та розкрутки потоку в зоні В1-К, дає змогу замінити в зоні Н-В2 закон переміщення частин потоку з наростаючим прискоренням, що має місце у нинішніх гребних гвинтах, на синусоїдний закон переміщення частин потоку зі знижувальним прискоренням, що майже повністю, на 80%, усуває кінематичну зону жорсткого (пружного) удару по вхідних кромках лопатей другого гребного гвинта, 11 35561 що стискує потік та генерує тягу. Це суттєво підіймає гідродинамічну стійкість роботи гребного гвинта та стелю по гідродинамічному перевантаженню в зоні В2-К та гідродинамічному недовантаженню в зоні К-С 2 при VП ³ 0, стелю по коловій швидкості U, що суттєво підвищує тягу гребних гвинтів. 3 Шляхом введення зростання оборотів наступного гребного гвинта суттєво підвищується гідродинамічна стійкість його роботи тому, що при однаковому зменшенні чи збільшенні осьової швидкості С а кут атаки змінюється на суттєво менше значення на тих лопатях гребного гвинта, де колова швидкість обертання U буде вищою. 4 Підвищення відносної осьової швидкості потоку в ви хідному перерізі С 2 лопатей другого гребного гвинта забезпечується суттєво ви щим ступенем стиснення водно-газового потоку в зоні В2-К, оскільки колова швидкість U лопатей другого гребного гвинта підвищена на 80% у порівнянні з існуючими гребними гвинтами. 5 Згідно з п.2 суттєве зниження децибельної характеристики гребних гвинтів на всіх режимах роботи, що поряд з низькою потребою палива покращує екологію навколишнього середовища. 6 Згідно з п.2, п.4 суттєве зниження габаритних розмірів гребних гвинтів у порівнянні з прототипом для досягнення однакової тяги. 7 Поліпшення всіх екологічних та технікоекономічних показників гребних гвинтів, включаючи тягу (упор), витрату палива, габарити, вагу та інше. Наприклад, при однакових діаметральних розмірах з існуючими контробертальними гребними гвинтами, тяга гребних гвинтів, що заявляються, буде на 80% вищою, що досягається за рахунок усунення кінематичної зони жорсткого (пружного) удару та підвищення на цій основі колової швидкості U лопатей другого гребного гвинта, при цьому ККД гребних гвинтів буде найвищий, оскільки напрямок тяги співпадає з віссю гребного гвинта, див. фіг. 6б. 8 Досягнутий технічний результат дозволить зробити ці гребні гвинти поза межами всякої конкуренції на світовому ринці. Таким чином, пропоноване технічне рішення, порівняно з прототипом, містить вище вказані істотні відмінні ознаки, отже відповідає умові «Новизна». Аналоги, що містять в собі ознаки, яки відрізняють технічне рішення, що заявляється, від прототипу, не виявлені в інших те хнічних рішеннях при вивченні цієї галузі техніки. На підставі цього можна зробити висновок, що запропоноване технічне рішення задовольняє критерію «Винахідницький рівень». Судовий двигуно-рушійний комплекс, що заявляється, див. фіг.2, складається з гребних гвинтів 1, 2, які відповідно жорстко з'єднуються з вихідним коаксіальним валом 3 та вихідним внутрішнім валом 4 редуктора 5, на протилежних кінцях яких жорстко встановлені зубчасті колеса 6, 7, які через проміжні зубчасті колеса 8, 9, 10, жорстко встановлених на проміжному валу 11, зв'язані з ведучим зубчастим колесом 12, яке жорстко встановлено на привідному валу 13, що зв'язаний з двигуном 14 12 через коробку швидкостей 15, що включає задній ходу. Винахід пояснюється кресленнями, де на фігура х представлено: - фіг.1 - критика існуючих гребних гвинтів; - фіг.2 - кінематична схема судового двигунорушійного комплексу, що заявляється; - фіг.3а - траєкторія руху частин потоку від зони спокійного потоку Н до вихідного перерізу лопатей другого гребного гвинта, що стискує та прискорює потік, генеруючи при цьому тягу; - фіг.3б - характер зміни кутової швидкості ( w, -1 с ) та кутового прискорення потоку ( e , с-2); - фіг.3в - план швидкостей потоку на лопатях першого та другого гребного гвинта (робочого колеса — РК); - фіг.3г - форма водно-газодинамічного тракту лопатей другого гребного гвинта, яка складається з зони стиснення В2-К та зони прискорення потоку К-С2, в якій генерується тяга гребного гвинта. Характер розподілу статичного тиску по коритцю лопатей (лопаток) див.[1], с.68, мал..3.3, .[4], с, 19, фіг.1, с.21, фіг.3г; - фіг.4а - кінематичний аналіз характеру зміни осьових швидкостей та статичного тиску в контрольному контурі Н-Н1 при Vn = 0 - фіг.4б - кінематичний аналіз характеру зміни осьових прискорень потоку, він же, тільки навпаки, характер зміни динамічних (інерційних) сил у контрольному контурі Н-Н1 при Vn = 0; - фіг.4в - кінематичний аналіз характеру зміни рушійних сил у залежності від зміни статичного тиску в контрольному контурі Н-Н 1 при VП = 0, максимальний режим, для виводу формули тяги, рушійного (тягового) ККД, підйомної сили лопатей гребних гвинтів, що заявляються; - фіг.5 - роботу гребних гвинтів, що заявляютьb ся, в динаміці при 1 > 0, наприклад, при VП = Сср; - фіг. 5а - кінематичний аналіз характеру зміни осьових швидкостей та статичного тиску в контрольному контурі Н-Н1 при VП = Ccp порівняно з аналогічними при VП = 0; - фіг.5б - кінематичний аналіз характеру зміни осьових прискорень потоку, він же, тільки навпаки, характер зміни динамічних (інерційних) сил у контрольному контурі Н-Н 1 при VП= Сср порівняно з аналогічними при VП = 0; - фіг.5в - кінематичний аналіз характеру зміни рушійних сил у залежності від зміни статичного тиску в контрольному контурі Н-Н і при VП = Сср порівняно з аналогічними при VП = 0. - фіг.6 - фізична основа генерування підйомної сили профілю, що продувається (6а), та шля хи підвищення ККД гребних гвинтів (66); - фіг.6а - напрям тяги одинарного гребного гвинта, який завжди протилежний напрямку середньої абсолютної швидкості потоку С m, показано, що ККД гвинта тим більше, чим менше кут a між напрямком тяги R та віссю гвинта на епюрі; - фіг 6б - показано, що для досягнення найбільшого ККД гребних гвинтів, що заявляються, потік на виході з другого гвинта, який утворює тягу, мусить бути трохи закрученим у напрямку обертання з тим, щоб середня абсолютна швидкість потоку 13 35561 Сm, протилежно котрій направлена тяга R, співпадала з віссю гвинта на епюрі. Розглянемо роботу судового двигунорушійного комплексу в динаміці при VП = 0. Уся потуга двигуна 14 через коробку швидкостей 15 передається привідному валу 13 редуктора 5. При обертанні привідного валу 13 з ведучим зубчастим колесом 12 крутильний момент через зубчасті колеса 10, 9, 8, 7, 6 передається на два гребні гвинти 1, 2, при цьому передаточні відношення зубчастих коліс забезпечують збільшення обертів гребних гвинтів 1, 2 по ходу потоку та їх суп утнє (в одному напрямку) обертання. У зоні НВ2, див.фіг.4, статичний тиск знижується. Із води при зниженні статичного тиску відокремлюються бульбочки розчиненого у воді газу, при цьому утворюється водно-газова суміш (водно-газовий потік), який повністю підпорядковується усім законам механіки течій рідин та газів. Кінематичний аналіз характеру зміни осьових швидкостей та прискорень цього потоку показує, що у зоні Н-В2, див. фіг.4, має місце синусоїдний характер зміни осьових швидкостей та прискорень потоку. Це досягається тим, що другий гребний гвинт має суттєво більшу витрату водно-газової суміші ніж перший гребний гвинт. Це означає, що другий гребний гвинт інжектує водно-газову суміш (потік) через перший гребний гвинт, збільшуючи при цьому відносну швидкість потоку на вході та виході в лопатях першого гребного гвинта W1, W2. Збільшення W1 при постійній коловій швидкості U веде до закрутки потоку в зоні Н-В1 перед першим гребним гвинтом проти обертання гребних гвинтів 1, 2. Таким чином, перший гребній гвинт не стискує і не прискорює потік, він служить тільки обертальним направляючим апаратом з заданим законом обертання, що призводить до закрутки потоку в зоні Н-В1 та суттєво відрізняє гребні гвинти, що заявляються, від усіх нинішніх гребних гвинтів, в яких у зоні Н-В, див. фіг. 1, має місце осьовий потік. Від зони Н потік повільно закручується, див. фіг. 3а, і досягає максимальної закрутки в перерізі В1 перед першим гребним гвинтом. Під дією відцентрових сил, які максимальні в перерізі В1, генерується градієнт статичних тисків, направлений до центру переріза В; , див. фіг.4, 5. Цей градієнт статичних тисків стягує потік у джгут до і після перерізу В1 . Таким чином поступове наростання закрутки потоку в зоні Н-В1 та суттєве гальмування потоку в зоні В1 - В 2 під дією градієнта статичних тисків, направленого проти потоку в цій зоні до центру переріза В1, сприяє зміні закону переміщення частин потоку з наростаючим прискоренням, що має місце в нинішніх гребних гвинтах, на закон переміщення частин потоку зі знижувальним прискоренням, яке в перерізі В2 зводиться до нуля. На другому гребному гвинті іде вже стиснення потоку(водно-газової суміші), див. фіг.3б, 4, 5, тому по вхідних кромках лопатей удар залишається, див. фіг.4, 5, але потуга цього удару в 4-5 разів слабше ніж у нинішніх гребних гвинта х, див. фіг.1. Розкручування потоку починається вже на першому гребному гвинті, див. фіг. За, і завершується на лопа 14 тях другого гребного гвинта, на виході з якого потік має трохи закручений напрям з тим, щоб середня абсолютна швидкість потоку С m співпадала з віссю гвинта, оскільки тяга гвинта завжди направлена протилежно Сm, див. фіг.6б. у цьому випадку ККД гвинтів судового двигуно-рушійного комплексу, що заявляється, буде найвищим. Треба відмітити, що кількість лопатей першого гребного гвинта мусить перевершувати кількість лопатей другого гребного гвинта для більш плавної закрутки потоку в зоні Н-В1, а гвинтова потуга на першому гребному гвинті суттєво менше за аналогічну на другому гребному гвинті. Таким чином, зменшення потуги удар у по вхідних кромках лопатей другого гребного гвинта в 45 разів є основою збільшення обертів другого гребного гвинта на 80% у порівнянні з існуючими гребними гвинтами, збільшення абсолютної осьової швидкості потоку С а на вході в лопаті другого гребного гвинта та покращення екології навколишнього середовища за рахунок зниження децибельної характеристики та витрати палива. Кінематичний аналіз показує, що напрям динамічних (інерційних) сил завжди протилежно напряму прискорень потоку. А напрям рушійних сил від зміни статичного тиску завжди співпадає з напрямом градієнта статичних тисків, за потоком плюс, проти потоку - мінус, наприклад, у зоні Н-В градієнт рушійних сил від зміни статичного тиску направлено за потоком (плюс), див. фіг. 1, 4, 5, у зоні В-К, див. фіг.1, 3 г, 4, 5, проти потоку (мінус), у зоні К-С, див. там же, за потоком (плюс), у зоні СН1 зоні реактивної струми, градієнт рушійних сил від зміни статичного тиску завжди дорівнює нулю, оскільки у реактивній струмі PіFі = const, потік у цій зоні рухається тільки під дією інерційних сил. Аналіз характеру зміни динамічних (інерційних) сил та рушійних сил від зміни статичного тиску, див. фіг.1, 4. 5, показує, що в зоні контрольного контуру Н-Н 1 середні динамічні (інерційні) сили, які генеруються в зонах Н-В2, В2-К, К-С2 , С2-Н1 взаємно знищують одна одну, середні рушійні сили від зміни статичного тиску в зонах Н-В2 та В2-К теж взаємно знищують одна одну, в зоні реактивної струми С2-Н1 градієнт рушійних сил від зміни статичного тиску завжди дорівнює нулю, тому що в реактивній струмі при будь-яких значеннях статичного тиску у ви хідному перерізі лопатей гребного гвинта (РС >РН, РС = РН, РС 0, (3) * R*' = R* ± DRНср де Нср Нср . FHcp = t 1 1, при VП = 0, Fc = t .1, при VП = 0, F’Нср = t’1 .1, при VП > 0 , F’C = t’.1, при VП > 0, 15 35561 Тобто тяга однієї лопаті - це різниця між середньою рушійною силою в зоні К-С (Р*НсрFНср) та силою опору (PCFC), приведених до зони спокійного потоку Н. Треба відмітити, що середній статичний тиск у середньому перерізі Г, P*Нср, при VП > 0 повністю залежить від зміни середньої швидкості потоку С'ср при VП > 0, див. виведену формулу тяги, а тягова потуга гребного гвинта завжди дорівнює множенню R • Сср, при VП = 0, R' • С'ср, при VП > 0, тому рушійний (тяговий) ККД гребного гвинта, згідно з рішенням, що заявляється, розраховується як: æ ö R F h T = ç 1- * C C ÷ ´ 100% ç RНсрFНср ÷ è ø , при VП = 0, (4) æ R' F' ö hП = ç 1- *' C C ÷ ´ 100% ç RНсрF'Нср ÷ è ø , при VП > 0, (5) Підйомна сила лопатей гребного гвинта при цьому розраховується, див. фіг.6а, 6б, як: P = R•Sin a = (P*НсрFНср - PC • FC) •n•Sin a , при VП = 0, (6) P’ = R’•Sin a ’ = (P*’НсрF’Нср – P’C • F’ C) •n•Sin a ’, при VП > 0, (7) Таким чином, головною властивістю потоку у межах контрольного контуру Н-Н 1 є те, що сума інерційних (динамічних) сил у цьому контурі завжди дорівнює нулю. Для виводу формули тяги гребних гвинтів за допомогою рівняння Ейлера треба обидві частини цього рівняння поділити на D t, з метою переходу на розмірність кг або Н, після чого рівняння Ейлера має вигляд: DV mB × = mB × a = å Ri, Dt (8) де m B - секундна витрата маси потоку через лопать гребного гвинта, трубк у току у зоні К-С 2, D V - різниця осьової швидкості потоку на виході та вході у тр убку току у зоні К-С 2, D t - термін імпульсу зовнішніх сил, діючих на трубку току у зоні К-С 2, або термін переміщення потоку від переріза К до перерізу С2, DV =a Dt - зміна прискорення потоку у зоні К-С 2, m B • a - зміна сили інерції потоку у зоні К-С 2, å Ri - сума усі х інших зовнішніх сил, включаючи силу тяги R, лопаті гребного гвинта, реакції відокремлених потоків, які діють на трубку току у зоні К-С2. У цьому випадку рівняння Ейлера (8) читається тільки так: зміна сили інерції потоку m в • а, яка є однією із зовнішніх сил, діючих на тр убку току у зоні К-С 2, завжди дорівнює сумі всіх інши х зовнішніх сил, включаючи силу тяги R1 однієї лопаті гребного гвинта, а також реакції відокремлених потоків від інерційних (динамічних) сил та рушійних сил від зміни статичного тиску, діючих на переріз К зліва, від зони Н-К, та на переріз С 2 справа, від зони C2-H1. Запишемо рівняння Ейлера (8) у векторній формі: 16 * mB a = RiH1 + RiH2 + RHcpFHcp + RCFC + R1, (9) де RiH1 - реакція відокремленого потоку зони Н-К від інерційних (динамічних) сил, яка діє на переріз К зліва, R iH 2 - реакція відокремленого потоку зони С 2Н1 від інерційних (динамічних) сил, яка діє: на переріз С2 справа, R1 - тяга однієї лопаті гребного гвинта. Треба відмітити, що робота відцентрових сил, яка генерується при переміщенні потоку по криволінійний поверхні коритця профілю лопаті гребного гвинта, згідно рівняння Бернуллі, повністю витрачується на додаткове стиснення потоку та зміну його кінетичної енергії, беручи активну участь у процесі створення тяги. У рівнянні Ейлера ці сили не враховуються, оскільки вони скомпенсовані рівним і протилежно направленим тиском потоку. Реакції відокремлених потоків у зоні Н-К та С 2Н1, які діють на перерізі К, С2 з боку р ушійних сил від зміни статичного тиску, завжди дорівнюють нулю, тому рівняння Ейлера (9) можна записати як: * R iH1 + mB × a + R iH2 = R 1 + RHcpFHcp + RCFC . Ліва частина цього рівняння є сума інерційних (динамічних) сил у межах контрольного контур у НН1, яка завжди дорівнює нулю, тоді у модульній формі: 0 = -R1 + P*НсрFНс р - PCFC, (11) R = nR 1 = (P*НсрFНср – РCFC) • n при VП = 0 (2) R' = nR’1 = (P*’НсрF’Нср – P’CF’C )• n, при VП > 0, (3) Розрахунок тяги гребних гвинтів, що заявляються, діаметральні розміри яких дорівнюють відомим контробертальним гвинтам, див. [5], с 23, показує, що на максимальному режиму роботи, як і на усіх інших режимах, тяга гребних гвинтів, що заявляються, буде на 80% вищою, що є основою досягнення поліпшених техніко-економічних, екологічних показників та вирішення поставленого завдання. Розглянемо роботу судового двигуиорушійного комплексу, що заявляється, в динаміці при швидкості руху більше нуля, VП >0, наприклад при VП = Ccp, див. фіг.5. Кінематичний аналіз характеру зміни осьових швидкостей та прискорень потоку при VП = Сср показує, що при руху цей характер суттєво відрізняється від аналогічного при стендових випробуваннях, VП =0, див. фіг.4, 5. Це пов'язано з тим, що при руху на потік у зоні Н-Н 1 діє додаткова робота від переносної кінетичної енергії m BVП2/2, яка завжди направлена проти потоку в цій зоні, та перемінна робота інерційних сил від зміни швидкості руху та зміни відносних осьових швидкостей потоку Ci в контрольному контурі Н-Н1. Оскільки ми розглядаємо режим роботи гребних гвинтів при VП = const, роботу інерційних сил від зміни швидкості руху Vn, не вра ховуємо. Таким чином, при VП = Сср = const на будь-яку частину потоку в зоні контрольного контуру Н-Н1 буде діяти постійна додаткова робота від переносної кінетичної енергії m BVn /2, яка завжди направлена проти потоку, перемінна робота інерційних сил від зміни 17 35561 відносних осьових швидкостей потоку С i та перемінна робота рушійних сил від зміни статичного тиску. Переносна робота та перемінна робота інерційних сил в контрольному контурі Н-Н 1 доповнюють одна одну і при VП =CCp= const, згідно рівняння Бернуллі, змінюють статичний тиск, отже і рушійні сили в контрольному контурі Н-Н1 в межах закону збереження енергії. Треба відмітити, що робота інерційних сил від зміни відносних осьових швидкостей потоку, LPjH =Рiні • Vaбc =m B • аі(Сі • VП), (12) де LРін - робота інерційних сил в і-тому перерізі, РІНі. — сила інерції в і-тому перерізі, Vабс - абсолютна швидкість потоку в і-тому перерізі, m B - секундна витрата водно-газової суміші через площу і-того перерізу, ai - прискорення потоку в і-тому перерізі, Сi - осьова відносна швидкість потоку в і-тому перерізі, VП - швидкість переміщення, руху (переносна швидкість), порівняно з аналогічною при VП =0, змінює свій напрям і значення залежно від напряму і значення абсолютної швидкості потоку Vабс, генеруючи при цьому, в межах закону збереження енергії, зони загальмованого та прискореного потоку. Зона загальмованого потоку, наприклад, зона В-К, В2-К при VП = 0, див. фіг. 1 , 4 - це зона, де напрям інерційних сил збігається з напрямком абсолютної швидкості потоку, що генерує позитивну (умовно) роботу інерційних сил, направлену, згідно рівняння Бернуллі, на додаткове стиснення основного поток)/ при одночасному зменшенні відносної швидкості потоку Сі. Зона прискореного потоку, наприклад зона КС, К-С2 при VП =0, див. фіг. 1, 4 - це зона, де напрям інерційних сил протилежний напрямку абсолютної швидкості потоку, що генерує негативну (умовно) роботу інерційних сил, направлен}/, згідно рівняння Бернуллі, на додаткове прискорення потоку при одночасному збільшенні відносної осьової швидкості потоку та зниженні статичного тиску. Генерування зон загальмованого та прискореного потоку завжди відбувається в межах закону збереження енергії. Газодинамічні характеристики потоку в перерізі f (тиск, відносна осьова швидкість) залишаються такими, як при VП =0, абсолютна кінетична енергія потоку в перерізі f завжди дорівнює нулю. Кінематичний аналіз показує, що в зоні Н-В2, див. фіг.5, напрям інерційних сил збігається з напрямком абсолютної швидкості потоку Vабс • В цій зоні іде додаткове стиснення потоку з одночасним зменшенням відносної осьової швидкості потоку Сі. В перерізі Н вся робота від переносної кінетичної енергії m В VП2/2 іде на стиснення основного потоку, тому в перерізі Н статичний тиск Р*Н суттєво перевищує РН навколишнього середовища статичний тиск на глибині занурювання гребного гвинта, див. фіг.5. Оскільки в перерізі В2 при збільшенні швидкості руху VП зростає статичний тиск, то витрата во 18 дно-газової суміші через гребні гвинти зростає, зростає також розрахунковий рівень підвищення тиску П к * лопаті гребного гвинта, статичний тиск у перерізі К, див. фіг.3г, 5, збільшується. Кінематичний аналіз показує, що в зоні В2 - К, зоні стиснення потоку на лопатях другого гребного гвинта, див. фіг.5. фіг.3г, напрям інерційних сил є протилежним напряму абсолютної швидкості потоку Vабс. В цій зоні під дією негативної роботи інерційних сил іде прискорення потоку з одночасним зменшенням розрахункової ступені стиснення потоку П к *, що приводить до недовантаження гребного гвинта у цій зоні. При СВ2 > VП >Cк , де СВ2 - осьова відносна швидкість потоку в перерізі В2, див. фіг.5, має місце нерівномірне завантаження лопатей гребного гвинта: перша зона B2-f перевантажена, тому що робота інерційних сил направлена на додаткове стиснення потоку при одночасному зменшенні відносної осьової швидкості та збільшенні статичного тиску, друга зона f-К буде недовантаженою, оскільки робота інерційних сил направлена на додаткове прискорення потоку у цій зоні при одночасному збільшенні відносної осьової швидкості потоку та зменшення статичного тиску. При VП ³ СВ2 вся зона стиснення потоку на лопатях гребного гвинта В2-К буде недовантаженою. Треба відзначити, що потужні ударні хвилі, які генеруються в кінематичній зоні жорсткого (пружного) удару на вході в лопаті існуючих гребних гвинтів, див. фіг. 1, які направлені за або проти потоку, завжди призводять до збільшення інерційних сил у зоні Н-В та В-К, що в свою чергу призводить до додаткового стиснення потоку в зоні, де лопаті перевантажені та додаткового прискорення потоку в зоні, де лопаті гребних гвинтів недовантажені з усіма негативними наслідками. Вихід з цього суто кінематичного, дуже небезпечного дефекту тільки один: треба усун ути потужні удари хвилі, які генеруються в кінематичній зоні жорсткого (пружного) удару на вході в лопаті існуючих гребних гвинтів та збільшува ти оберти наступних гребних гвинтів тому, що при однаковому зменшенні чи збільшенні осьової швидкості потоку С а кут атаки і змінюється на суттєво менше значення на тому гребному гвинті, де колова швидкість обертання U буде вищою, що виконано в гребних гвинта х, що заявляються, що є гарантом відсутності розвиненого зриву потоку по спинці та по коритцю лопатей гребних гвинтів, гарантом суттєвого покращення техніко-економічних показників гребних гвинтів. Кінематичний аналіз показує, що в зоні К-f напрям інерційних сил збігається з напрямом абсолютної швидкості потоку Vабс. У цій зоні під дією позитивної роботи інерційних сил іде додаткове стиснення основного потоку до 20% з одночасним зменшенням відносної осьової швидкості потоку Сі. В цій зоні характеристика зміни статичного тиску збільшується відносно аналогічної при VП = 0, тому характеристика зменшення статичного тиску при розширенні потоку стає більш крутішою і при VП = Сср ця характеристика проходить через точку Г, яка збігається з середнім перерізом, див. фіг.4. 19 35561 У нашому випадку перерізи f, Г, Сср співпадають, оскільки VП = Сср, тому газодинамічні параметри потоку (тиск, осьова відносна швидкість) залишаються в перерізі f такими, як при VП = 0, D Р*Нср при цьому дорівнює нулю. Треба відзначити, що характеристика зміни статичного тиску проходить через точку Г тільки у двох випадках: при VП = 0 та VП = Сср, в усіх інших випадках ця характеристика проходить нижче (при VП Ccp, що буде відповідно зменшувати (- D Р*Нср), або збільшувати (+ D P*Нср) тягу гребних гвинтів, гене*' ± DRНср руючи , див. формули тяги, що заявляються. При цьому характер зміни тяги гребних гвинтів у залежності від VП спочатку буде зменшуватися у порівнянні з тягою при VП = 0, потім збільшуватись і при VП = Сср тяга гребних гвинтів досягає такого ж значення, як і при VП = 0, при умови збереження РС = РН. Характер зміни тяги гребних гвинтів залежно від швидкості руху VП згідно з формулами тяги, що заявляються, можна пояснити також залежністю зменшення чи прирощення статичного тиску в середньому перерізі Г при наборі швидкості руху VП від зміни відносної осьової швидкості потоку в середньому перерізі Г ( D Р*Нср від Сср). При VП Ccp переріз f знаходиться вже між перерізами Г і С с. . Середній переріз Г при цьому знаходиться вже в зоні загальмованого потоку, Сср починає зменшуватися при одночасному збільшенні (+ D Р*Нср), тяга гребних гвинтів зростає за рахунок позитивного (+ D Р*Нср). Кінематичний аналіз показує, що в зоні f-C2 при VП = Сср напрям інерційних сил є протилежним напряму абсолютної швидкості потоку Vабс. В цій зоні під дією негативної роботи інерційних сил іде додаткове прискорення потоку до 20% з одночасним зниженням статичного тиску нижче РН, FС при цьому зменшується за рахунок зменшення t’, див. фіг.3г. Оскільки характеристика зміни статичного тиску при VП = Сср стає більш крутішою, то розширення потоку до РН має місце задовго до вихідного перерізу С2 лопаті другого гребного гвинта, див. фіг.5, переріз A1, при цьому нижче перерізу А, де статичний тиск потоку мінімальний, генеруються відривні зони та течії, які знижують тягу гребних гвинтів. Це явище є спільним для всіх гребних гвинтів, але для гребних гвинтів, що заявляються, кут відриву потоку від поверхні коритця лопаті другого гребного гвинта суттєво менший у порівнянні з аналогічним для існуючих гребних гвинтів, що призводить до суттєво менших втрат тяги. Це поясню 20 ється більш плавною кінематикою потоку в гребних гвинта х, що заявляються. Таким чином, при VП = Сср, незважаючи на втрати тяги по відривним течіям, загальна тяга гребних гвинтів, що заявляються, збільшується за рахунок зниження Р’CF’C, див. формулу 3, і досягає такого ж значення, як при VП =0. Кінематичний аналіз у зоні C2-H1 зоні реактивної струми, показує, що в реактивному струмені, див.фіг.5, генерується зона прискореного потоку f1H1. При збільшенні швидкості руху VП зони Н - f та f1-H1 своїми перерізами f та f1 поступово наближаються до вихідного перерізу С 2 лопатей другого гребного гвинта, Р’Hcp при ньому збільшується, витрата потоку через гвинти зростає, Р’C збільшується та наближається до РH, втрати тяги від відривних зон та відривних течій зменшуються, оскільки зона А при збільшенні швидкості руху поступово наближається до вихідного перерізу С 2, тяга гребних гвинтів збільшується і при VП = CC2 досягає свого максимального значення, яке суттєво перевищує тягу гребних гвинтів при VП = 0. При VП = Сс фронти двох енергетичних потоків Н- f та f1-H1 своїми перерізами f та f1 сходяться на перерізі С2 лопатей другого гребного гвинта. Оскільки фронти двох енергетичних потоків у перерізі f та f1 знаходяться в постійному потужному коливальному процесі, то при їх з устрічі в перерізі С2 генерується потужна стояча ударна хвиля, потуга якої при збільшенні VП > Сc2 зростає, ця стояча ударна хвиля запирає потік, Р’C збільшується вище РH, тяга гребних гвинтів поступово зменшується та при Р’CF’C, що рівняється P*’НсрF’Нср, стає рівною нулю. Таким чином, кінематичний аналіз показує, що найбільш раціональним режимом руху гребних гвинтів, що заявляються, є режим, коли VП =СС2, а найвищий ККД, при усі х режимах роботи у порівнянні з існуючими одинарними та контробертальними гребними гвинтами, досягається тим, що тяга гребних гвинтів судового двигуно-рушийного комплексу, що заявляється, завжди співпадає з віссю гребних гвинтів, що досягається незначною закруткою потоку на виході з другого гребного гвинта у напрямку обертання з тим, щоб середня абсолютна швидкість потоку Сm, протилежно котрій завжди направлена тяга, співпадала з віссю гребних гвинтів, див. фіг.6б. Все це дає всі підстави заявити, що судовий двигуно-рушійний комплекс, що заявляється, буде мати поліпшену характеристику тяги порівняно з нинішніми гребними гвинтами через майже повну відсутність кінематичної зони жорсткого (пружного) удару, та на цій основі суттєво поліпшені технікоекономічні та екологічні показники. Таким чином, застосування невідомого в теорії гребних гвинтів методу кінематичного аналізу характеру зміни осьових швидкостей, прискорень потоку, рушійних сил від зміни статичного тиску дозволяє не тільки правильно вивести формулу тяги, рушійного (тягового) ККД, підйомну силу лопатей гребних гвинтів, що суттєво поліпшує наше уявлення про процес генерування тяги та підйомної сили на лопатях гребних гвинтів, але й виявити всі недоліки нинішніх гребних гвинтів при VП ³ 0, 21 35561 пов'язаних з наявністю кінематичної зони жорсткого (пружного) удару по вхідних кромках лопатей гребних гвинтів та інші. Показано, що усунути цей дуже небезпечний недолік можливо тільки змінивши характер переміщення частин потоку в зоні НВ, див. фіг. 1, з наростаючим прискоренням, що має місце у нинішніх гребних гвинтах, на характер переміщення частин потоку в зоні Н-В, див. фіг.4, 5, зі знижувальним прискоренням у гребних гвинтах що заявляються, це досягається тим, що потік, за рахунок введення першого гребного гвинта, який не стискує і не прискорює потік, а застосовується тільки як обертальний з заданим законом обертання направляючий апарат, закручується в зоні Н-В1 та розкручується в зоні В1-К, див. фіг.3а, що дає змогу майже повністю усун ути кінематичну зону жорсткого (пружного) удару і на цій основі підвищити оберти, а значить і тягу другого гребного гвинта на 80% у порівнянні з існуючими контробертальними гребними гвинтами, що дозволяє досягнути абсолютно вищих те хніко-економічних та екологічних показників (за рахунок зниження децибельної характеристики) гребних гвинтів, що заявляються. Виходячи з вищевикладеного, можна зробити висновок, що пропоноване технічне рішення, су 22 довий двигуно-рушійний комплекс, може бути застосовано в те хніці і задовольняє критерію «промислова застосовність». Джерела інформації: 1. Казанджан П.К. Теория авиационных двигателей [Текст]/ П.К. Казанджан., Н.Д. Тихонов., А.К. Янко// Москва: Машиностроение, 1983. -223с. 2. Справочник по малотоннажному судостроению [Текст] /Составитель БГ.Мордвинов. Ленинград: Судостроение, 1988.- 576 с. 3. Патент 2027902, Российкая федерация, МПК7 F03H5/00, F04D19/00. Способ создания тяги [Текст] /Б.Ш. Мамедов (Украйна). -№4652005/23; заявл.24.12.1988; опубл. 27.01.95.-4с. 4. Патент 26883, Україна, МПК6 В64С11/00, В64С27/00, В64 D35/00. F04K3/00. Турбогвинтовентиляторний двигун [Текст] /Б.Ш.Мамедов, - № u2007 05886; заявл. 29.05.2007; опубл. 10.10.2007, Бюл.№ 16.-4 с 5 Александров Ю. «Антей» и «Граниты» [Текст] //Техника молодежи.-М,2003,№10.-С. 23. 6 Привалов Л. Винт преодолел звуковой барьер[Текст] //Те хника молодежи, М, 2005.-№2 .-С. 1821. 23 35561 24 25 Комп’ютерна в ерстка Д. Шев ерун 35561 Підписне 26 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюShip propulsion machinery
Автори англійськоюMamedov Borys Shamshadovych
Назва патенту російськоюСудовой двигательно-движительный комплекс
Автори російськоюМамедов Борис Шамшадович
МПК / Мітки
МПК: B63H 1/14, B63H 1/28, B63H 5/00
Мітки: комплекс, судновий, двигуно-рушійний
Код посилання
<a href="https://ua.patents.su/13-35561-sudnovijj-dviguno-rushijjnijj-kompleks.html" target="_blank" rel="follow" title="База патентів України">Судновий двигуно-рушійний комплекс</a>
Судновий підрулюючий пристрій
Номер патенту: 28498
Опубліковано: 10.12.2007
Автори: Данильченко Ігор Євгенович, Данильченко Наталя В'ячеславівна, Родічева Надія Іванівна, Сухоносов Валерій Петрович, Пишнєв Сергій Миколайович
МПК: B63H 21/00
Мітки: судновий, пристрій, підрулюючий
Формула / Реферат:
1. Судновий підрулюючий пристрій, що містить електродвигун постійного струму, корпус з розташованим в ньому редуктором, муфту, що з'єднує електродвигун з редуктором, гребний гвинт, встановлений на гребному валу, який відрізняється тим, що корпус редуктора виконаний складаної конструкції із знімною задньою кришкою з високолегованої нержавіючої сталі.2. Судновий підрулюючий пристрій за п. 1, який відрізняється тим, що гребний гвинт...
Рушійний пристрій для підводного робота

Номер патенту: 27504
Опубліковано: 12.11.2007
Автори: Родічева Надія Іванівна, Данильченко Ігор Євгенович, Пишнєв Сергій Миколайович, Данильченко Наталя В'ячеславівна
МПК: B63H 20/00
Мітки: робота, рушійній, пристрій, підводного
Формула / Реферат:
1. Рушійний пристрій для підводного робота, що містить корпус з розташованим всередині електродвигуном із знижувальним редуктором і ведучим валом, гребні гвинти, встановлені на гребних валах і розміщені в насадці, який відрізняється тим, що гребні вали розміщені перпендикулярно до ведучого вала і з'єднані з останнім за допомогою конічної передачі, при цьому корпус електродвигуна закріплений зовні насадки.2. Рушійний пристрій за...
Судновий гусенично-лопатевий рушій
Номер патенту: 12300
Опубліковано: 16.01.2006
Автори: Агризько Володимир Валерійович, Белінський Едуард Валерійович, Стемпень Віктор
МПК: B63H 1/34
Мітки: судновий, гусенично-лопатевий, рушій
Формула / Реферат:
1. Судновий гусенично-лопатевий рушій, що складається з двох суцільних розташованих паралельно одна до одної гусеничних стрічок, кожна з яких насаджена на барабани, один з яких ведучий - призначений для з'єднання півосями з диференціалом, який кінематично з'єднаний з двигуном, а кожна із згаданих стрічок обладнана розташованими на її зовнішній поверхні гребними лопатями, який відрізняється тим, що гребні лопаті на зовнішній поверхні кожної із...
Судновий гусенично-лопатевий рушій
Номер патенту: 74030
Опубліковано: 17.10.2005
Автори: Белінський Едуард Валерійович, Агризько Володимир Валерійович
МПК: B63H 1/34
Мітки: судновий, рушій, гусенично-лопатевий
Формула / Реферат:
Судновий гусенично-лопатевий рушій, що складається з двох суцільно розташованих, паралельних одна до одної, гусеничних стрічок, кожна з яких насаджена на допоміжні ролики та ведучі барабани, які з’єднані півосями з диференціалом, який відрізняється тим, що кожна з гусеничних стрічок має Н – подібний профіль та обладнана гребними лопатями, розташованими на її зовнішній поверхні перпендикулярно до неї.
Судновий напівзанурений рушій
Номер патенту: 19663
Опубліковано: 25.12.1997
Автор: Слинько Петро Петрович
Мітки: рушій, судновий, напівзанурений
Формула / Реферат:
1. Судовой полупогружной движитель, содержащий гребной вал, размещенный под углом к продольной вертикальной плоскости судна, с полупогружными гребными лопастями, размещенными с возможностью изменения положения по отношению к продольной вертикальной плоскости и/или к основной плоскости судна, отличающийся тем, что при входе в воду нагнетающая сторона каждой лопасти расположена по существу перпендикулярно продольной вертикальной плоскости...
Попередній патент: Спосіб сейсмічної розвідки
Наступний патент: Барабанний млин
Випадковий патент: Ручна сівалка