Патенти з міткою «робота»
Захват крокуючого робота

Номер патенту: 117979
Опубліковано: 10.07.2017
Автори: Поліщук Михайло Миколайович, Пасько Віктор Петрович, Ткач Михайло Мартинович
Мітки: захват, крокуючого, робота
Формула / Реферат:
1. Захват крокуючого робота, що містить еластичну камеру, гофровані оболонки, джерела вакууму й надлишкового тиску, який відрізняється тим, що захват оснащений гострими зачепами, установленими зі спіральною пружиною на останній ланці кожного гофрованого трубопроводу, причому порожнини вакууму й надлишкового тиску зв'язані сильфоном зі зворотним клапаном. 2. Пристрій за п. 1, який відрізняється тим, що гофровані...
Спосіб керування переміщенням мобільного робота в теплиці
Номер патенту: 114191
Опубліковано: 27.02.2017
Автори: Лисенко Віталій Пилипович, Лендєл Тарас Іванович, Чернов Ігор Ігорович, Болбот Ігор Михайлович
МПК: B25J 9/18, B25J 9/16, G05B 19/416 ...
Мітки: спосіб, керування, теплиці, переміщенням, робота, мобільного
Формула / Реферат:
Спосіб керування переміщенням мобільного робота в теплиці, що здійснюється за допомогою системи керування, який відрізняється тим, що за зображенням камери формується мапа перешкод для переміщення робота, де накладаються дані методом кластерного аналізу з уточненої математичної моделі просторового розподілення температурних полів для визначення контрольних точок, в яких роботу необхідно провести виміри та на основі яких будується маршрут...
Спосіб переміщення педіпуляторів крокуючого робота і пристрій для його здійснення

Номер патенту: 111021
Опубліковано: 10.03.2016
Автори: Персиков Владислав Костянтинович, Поліщук Михайло Миколайович, Ямпольський Леонід Стефанович
МПК: B62D 57/032, B25J 11/00
Мітки: крокуючого, педіпуляторів, пристрій, спосіб, здійснення, переміщення, робота
Захоплювальний пристрій промислового робота
Номер патенту: 103226
Опубліковано: 10.12.2015
Автори: Павленко Іван Іванович, Смірнов Антон Сергійович, Годунко Максим Олегович
МПК: F15B 15/00
Мітки: робота, захоплювальний, промислового, пристрій
Формула / Реферат:
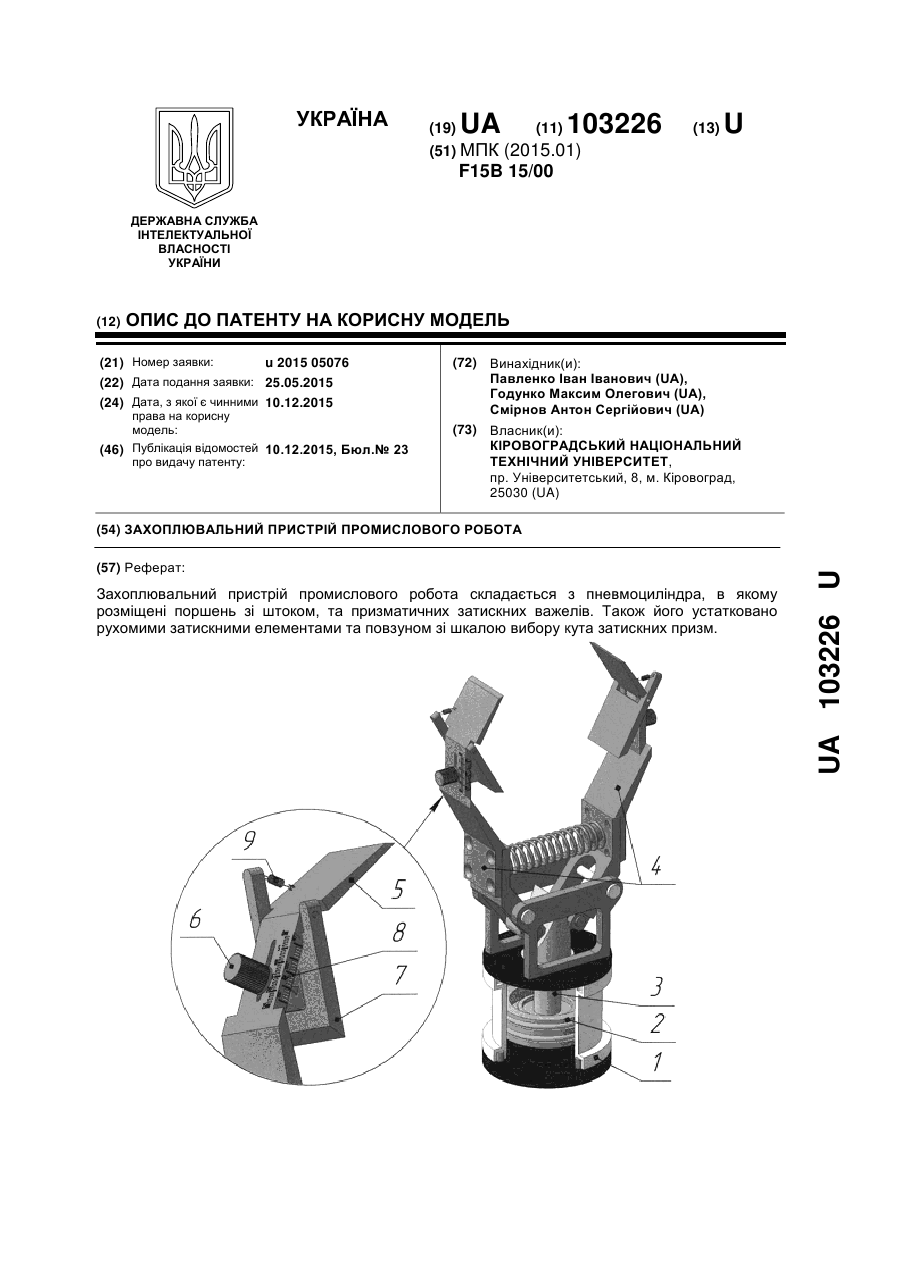
Захоплювальний пристрій промислового робота, який складається з пневмоциліндра, в якому розміщені поршень зі штоком, та призматичних затискних важелів, який відрізняється тим, що його устатковано рухомими затискними елементами та повзуном зі шкалою вибору кута затискних призм.
Рушій мобільного малогабаритного робота
Номер патенту: 96355
Опубліковано: 10.02.2015
Автори: Кобиляков Володимир Володимирович, Полівцев Сергій Олександрович, Цибульнік Олена Степанівна
МПК: B25J 11/00, B62D 57/00
Мітки: малогабаритного, рушій, робота, мобільного
Формула / Реферат:
1. Рушій мобільного малогабаритного робота, що містить корпус, симетричний горизонтальній площині, принаймні шість керованих ніг, що обертаються, розташованих по протилежних сторонах корпусу і забезпечених принаймні шістьма приводами, що індивідуально приводять кожну із вказаних ніг у рух, регулятор, що вибірково приводить у дію відповідну ногу, причому приводи містять двигун, з'єднаний із вказаним регулятором, і зубчату передачу, контролер,...
Адаптивний захватний пристрій інтелектуального робота
Номер патенту: 93878
Опубліковано: 27.10.2014
Автори: Швець Едуард Анатолійович, Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович
МПК: B25J 15/00
Мітки: пристрій, робота, інтелектуального, адаптивний, захватний
Формула / Реферат:
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, у губках з можливістю обертового переміщення встановлені роликоподібні рухливі елементи, кожний з яких пружно зв'язаний за допомогою зворотної циліндричної пружини з відповідною губкою, принаймні один з...
Захватний пристрій промислового робота
Номер патенту: 89728
Опубліковано: 25.04.2014
Автори: Годунко Максим Олегович, Заліпський Олег Миколайович, Павленко Іван Іванович
МПК: F15B 15/00
Мітки: робота, захватний, пристрій, промислового
Формула / Реферат:
Захватний пристрій промислового робота, що містить пневмоциліндр, в якому розміщені поршень зі штоком та приєднані до штока затискні важелі із затискними елементами, який відрізняється тим, що оснащений рухомими затискними елементами та ексцентриком для вибору кута їх приєднання.
Спосіб керування приводами маніпуляційної системи промислового робота
Номер патенту: 104215
Опубліковано: 10.01.2014
Автори: Ромасевич Юрій Олександрович, Ловейкін Вячеслав Сергійович
МПК: B25J 9/00, G05B 19/00
Мітки: спосіб, маніпуляційної, промислового, приводами, системі, керування, робота
Формула / Реферат:
Спосіб керування приводами маніпуляційної системи промислового робота, згідно з яким змінюють швидкості приводів поступального руху та обертального руху робота, причому так, що максимальні значення вказаних швидкостей поступального та обертального руху, відповідно
Захоплювальний пристрій промислового робота
Номер патенту: 84583
Опубліковано: 25.10.2013
Автори: Павленко Іван Іванович, Годунко Максим Олегович, Кіріченко Іван Дмитрович
МПК: C23C 4/00
Мітки: захоплювальний, пристрій, промислового, робота
Формула / Реферат:
Захоплювальний пристрій промислового робота, який містить пневмоциліндр, в якому розміщені поршень зі штоком, та приєднані до штока затискні важелі із затискними елементами, який відрізняється тим, що його встатковано рухомими затискними елементами, регулюючим гвинтом та шкалою для вибору кута їх приєднання.
Спосіб керування рухом промислового робота

Номер патенту: 101651
Опубліковано: 25.04.2013
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B25J 9/00, C05B 19/00
Мітки: рухом, робота, спосіб, промислового, керування
Формула / Реферат:
Спосіб керування рухом промислового робота, при якому розгін і гальмування ланки робота здійснюють при максимальному приводному моменті, який відрізняється тим, що розгін і гальмування ланки робота здійснюють за наступним дискретним законом, який описується поліноміальною залежністю від аргументу часу
Спосіб керування приводами маніпуляційної системи промислового робота
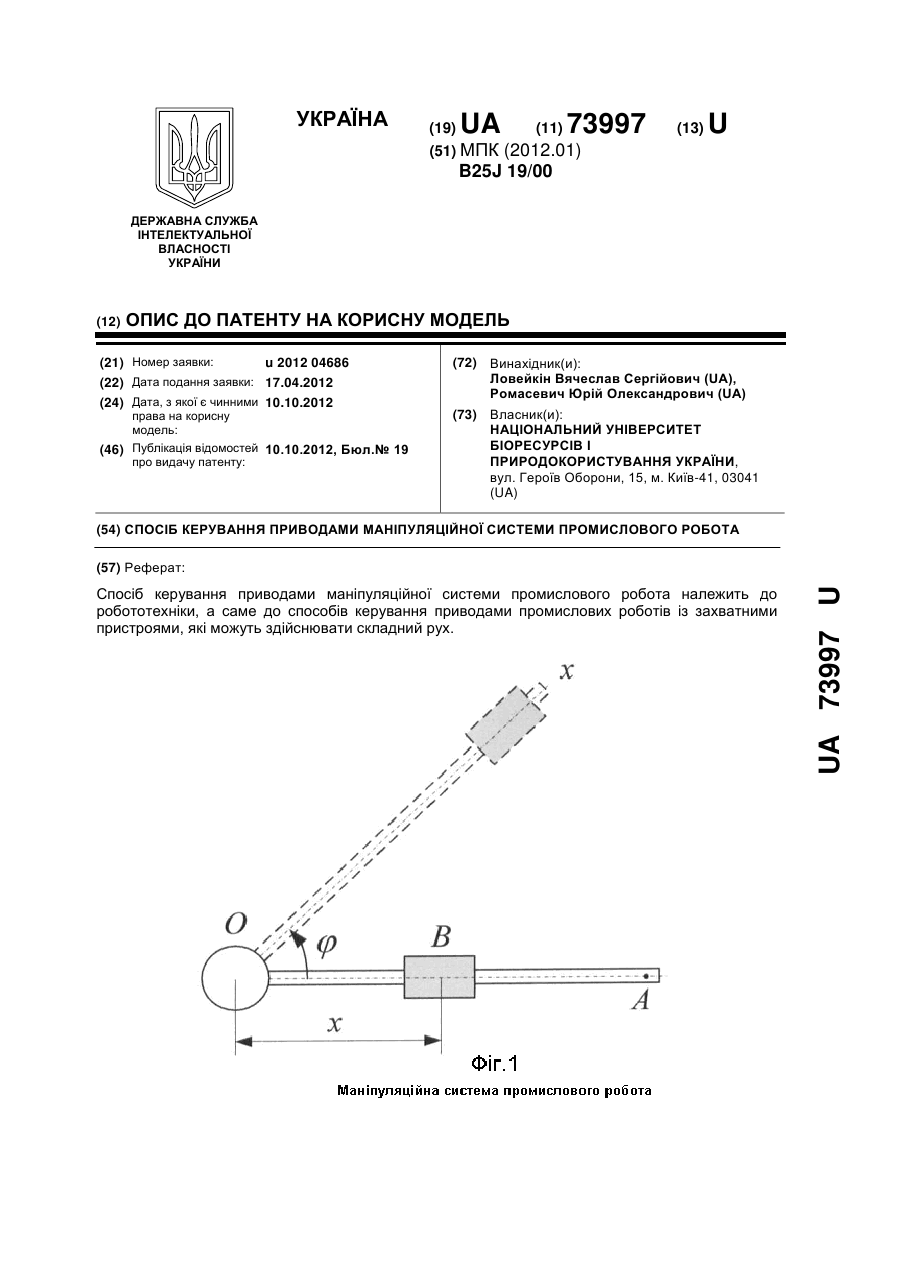
Номер патенту: 73997
Опубліковано: 10.10.2012
Автори: Ловейкін Вячеслав Сергійович, Ромасевич Юрій Олександрович
МПК: B25J 19/00
Мітки: маніпуляційної, спосіб, приводами, промислового, керування, системі, робота
Формула / Реферат:
Спосіб керування приводами маніпуляційної системи промислового робота, що включає зміну швидкостей приводів поступального та обертального руху робота, причому максимальні значення вказаних швидкостей не перевищують наперед встановлених значень, який відрізняється тим, що швидкості привідних механізмів робота змінюють за оптимальними законами, які описують дискретними функціями часу:- для приводу поступального руху
Захоплювальний пристрій промислового робота

Номер патенту: 71952
Опубліковано: 25.07.2012
Автори: Мажара Віталій Анатолійович, Годунко Максим Олегович, Павленко Іван Іванович
МПК: B25J 15/00
Мітки: промислового, пристрій, робота, захоплювальний
Формула / Реферат:
Захоплювальний пристрій промислового робота, який складається з пневмоприводу, корпусу та призматичних затискних важелів, який відрізняється тим, що важелі з'єднані пружиною розтиску, яка встановлена між короткими їх частинами відносно опор.
Спосіб адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об’єкта маніпулювання
Номер патенту: 68117
Опубліковано: 12.03.2012
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович, Кондратенко Галина Володимирівна, Назарова Ірина Леонідівна
МПК: G05B 19/00, B25J 19/02
Мітки: об'єкта, стискального, інтелектуального, проковзування, напрямку, адаптації, зусилля, ідентифікації, спосіб, маніпулювання, робота
Формула / Реферат:
Спосіб адаптації стискального зусилля інтелектуального робота та ідентифікації напрямку проковзування об'єкта маніпулювання, згідно з яким переміщують захватний пристрій з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного пристрою в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про...
Захоплювальний пристрій промислового робота
Номер патенту: 66207
Опубліковано: 26.12.2011
Автори: Годунко Максим Олегович, Павленко Іван Іванович, Мажара Віталій Анатолійович
МПК: B25J 15/00
Мітки: промислового, захоплювальний, робота, пристрій
Формула / Реферат:
Захоплювальний пристрій промислового робота, що складається з пневмоприводу, корпусу та приєднаних до останнього затискних важелів з призматичними затискними елементами, який відрізняється тим, що він містить два рухомі фіксатори та чотири пази для зміни відстані між опорами затискних важелів.
Двозахватний пристрій робота

Номер патенту: 65163
Опубліковано: 25.11.2011
Автори: Павленко Іван Іванович, Годунко Максим Олегович, Мажара Віталій Анатолійович
МПК: B25J 18/00, B23Q 3/06
Мітки: пристрій, робота, двозахватний
Формула / Реферат:
Двозахватний пристрій робота, що складається з корпуса, фланця, захватів, циліндрів зміни захватів місцями з шток-рейками, шестерень та підшипників, який відрізняється тим, що корпус виконаний у вигляді вилки.
Спосіб безперервної ідентифікації стискального зусилля адаптивного робота
Номер патенту: 63836
Опубліковано: 25.10.2011
Автори: Клименко Леонід Павлович, Кондратенко Юрій Пантелійович
МПК: G05B 19/00, B25J 19/02
Мітки: безперервної, адаптивного, робота, спосіб, зусилля, стискального, ідентифікації
Формула / Реферат:
Спосіб безперервної ідентифікації стискального зусилля адаптивного робота, згідно з яким переміщують захватний орган з, принаймні, двома затискними губками в початкове положення таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного органа в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох...
Модуль промислового робота
Номер патенту: 63459
Опубліковано: 10.10.2011
Автори: Стеценко Олексій Сергійович, Пестунов Володимир Михайлович
МПК: B25J 9/00
Мітки: промислового, модуль, робота
Формула / Реферат:
Модуль промислового робота, який містить корпус, кисть і привід грубих і точних переміщень по відповідній координаті переміщень, який відрізняється тим, що механізм виконавчого привода точних переміщень виготовлений у вигляді магнітострикційного стержня, послідовно установленого з передаточним механізмом руху по відповідній координаті переміщення і розташований у кінематичному ланцюгу до механізму переміщення, при цьому зазначений механізм...
Очутливлений кистьовий суглоб маніпулятора промислового робота

Номер патенту: 58988
Опубліковано: 26.04.2011
Автори: Сазонов Артем Юрійович, Кирилович Валерій Анатолійович
МПК: B25J 15/00
Мітки: очутливлений, промислового, робота, кистьовий, маніпулятора, суглоб
Формула / Реферат:
Очутливлений кистьовий суглоб маніпулятора промислового робота, що містить корпус, перший та другий інформаційні блоки пристрою очутливлення, привід (13) переміщення і схвату, причому перший інформаційний блок пристрою очутливлення містить внутрішній фланець (19), до якого жорстко закріплені захват та внутрішнє кільце (20), з'єднане з внутрішнім фланцем (19) чотирма попарно та діаметрально протилежно розташованими пружними елементами, кожний...
Робота на багатьох несучих в системах передачі даних
Номер патенту: 93376
Опубліковано: 10.02.2011
Автори: Монтохо Хуан, Малладі Дурга Прасад, Вілленеггер Серж Д.
МПК: H04W 28/16, H04L 12/56
Мітки: робота, багатьох, несучих, системах, передачі, даних
Формула / Реферат:
1. Безпровідний пристрій користувацького обладнання для здійснення зв'язку з базовою приймально-передавальною станцією радіомережі, при цьому безпровідний пристрій користувацького обладнання містить:приймач, сконфігурований для прийому, з базової приймально-передавальної станції, даних на першій несучій низхідної лінії зв'язку і на другій несучій низхідної лінії зв'язку, для визначення значень першого індикатора якості каналу для...
Спосіб адаптації інтелектуального робота до маси об’єктів маніпулювання
Номер патенту: 57158
Опубліковано: 10.02.2011
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович
МПК: B25J 19/02, G05B 19/00
Мітки: маніпулювання, робота, маси, спосіб, інтелектуального, об'єктів, адаптації
Формула / Реферат:
Спосіб адаптації інтелектуального робота до маси об'єктів маніпулювання, що включає переміщення захватного органа з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного органа в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом...
Робота з роз’єднаним і спільним каналом передачі даних в системі безпровідного зв’язку
Номер патенту: 92711
Опубліковано: 25.11.2010
Автор: Кхандекар Аамод
МПК: H04W 72/00, H04W 36/00
Мітки: роз'єднаним, каналом, даних, системі, зв'язку, передачі, безпровідного, робота, спільним
Формула / Реферат:
1. Пристрій для підтримування зв'язку з роз'єднаними каналами передачі даних у системі безпровідного зв'язку, який містить:процесор, сконфігурований з можливістю:генерувати інформацію, що вказує, чи підтримує сектор роз'єднані канали передачі даних для зв'язку,передавати повідомлення, що вказує, чи підтримуються сектором роз'єднані канали передачі даних;передавати інструкції обслуговуючому термінала...
Спосіб ідентифікації стискального зусилля та напрямку зміщення об’єкта в захватному пристрої інтелектуального робота
Номер патенту: 52069
Опубліковано: 10.08.2010
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович, Кондратенко Ніна Юріївна
МПК: B25J 19/02, G05B 19/00
Мітки: ідентифікації, зміщення, інтелектуального, пристрої, робота, стискального, спосіб, об'єкта, захватному, напрямку, зусилля
Формула / Реферат:
Спосіб адаптації стискального зусилля та ідентифікації напрямку зміщення об'єкта маніпулювання в захватному пристрої інтелектуального робота, згідно з яким переміщують захватний пристрій з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного пристрою в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і...
Гвинтовий захоплюючий патрон промислового робота

Номер патенту: 50936
Опубліковано: 25.06.2010
Автори: Гевко Ігор Богданович, Палюх Андрій Ярославович, Скиба Олена Павлівна, Дячун Андрій Євгенович, Ляшук Олег Леонтійович
МПК: F16B 2/20
Мітки: робота, гвинтовий, захоплюючий, патрон, промислового
Формула / Реферат:
Гвинтовий захоплюючий патрон промислового робота, що виконаний у вигляді корпуса поворотного диска з тягою, яка з'єднана з гвинтовим пружним затискним елементом який виконано у вигляді гвинта з горизонтальною ребровою частиною, яка по зовнішньому діаметру сформована у нахилену спіраль під кутом до ребрової горизонтальної частини, приводу, установчих і кріпильних елементів, який відрізняється тим, що привід жорстко під'єднаний до рухомого...
Спосіб магнітокерованого переміщення мобільного робота
Номер патенту: 47369
Опубліковано: 25.01.2010
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович, Запорожець Юрій Михайлович
МПК: B25J 9/10
Мітки: спосіб, магнітокерованого, робота, переміщення, мобільного
Формула / Реферат:
Спосіб магнітокерованого переміщення мобільного робота, згідно з яким мобільний робот оснащують ведучими колесами та притискними магнітами, розміщують його у робочій зоні, за допомогою притискних магнітів утримують його корпус на оброблюваній феромагнітній поверхні, приводять до руху ведучі колеса і здійснюють покрокове переміщення мобільного робота по оброблюваній феромагнітній поверхні, для чого почергово крок за кроком вводять у зчеплення...
Спосіб ідентифікації стискального зусилля адаптивного робота
Номер патенту: 47235
Опубліковано: 25.01.2010
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович
МПК: G05B 19/00, B25J 19/02
Мітки: ідентифікації, робота, адаптивного, спосіб, зусилля, стискального
Формула / Реферат:
Спосіб ідентифікації стискального зусилля адаптивного робота, згідно з яким переміщують захватний орган з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного органа в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом...
Колесо-рушій мобільного робота

Номер патенту: 45369
Опубліковано: 10.11.2009
Автори: Кондратенко Юрій Пантелійович, Запорожець Юрій Михайлович
МПК: B60F 3/00, B63B 59/00, B60B 19/00 ...
Мітки: мобільного, робота, колесо-рушій
Формула / Реферат:
Колесо-рушій мобільного робота, що містить маточину з геометричною віссю колеса, обід зі стрижнями з їх геометричними осями, розміщеними на сторонах правильного багатокутника, точка взаємного перетину бісектрис внутрішніх кутів якого розміщена на геометричній осі колеса, вузол для з'єднання маточини з ободом у місцях, розміщених у вершинах цього багатокутника, і шину, розділену між цими місцями по окружності колеса на секції, а багатокутник...
Робота каналу квітирування прямої лінії зв’язку для даних зворотної лінії зв’язку
Номер патенту: 87976
Опубліковано: 10.09.2009
Автори: Гаал Питер, Чен Тао, Саркар Сандіп, Тідманн Едвард Дж., мол.
МПК: H04B 7/005, H04L 1/00, H03M 13/13 ...
Мітки: зворотної, прямої, каналу, робота, даних, зв'язку, лінії, квітирування
Формула / Реферат:
1. Спосіб квітирування в системі безпровідного зв'язку, який містить етапи, на яких:приймають кадр даних каналу трафіку зворотної лінії зв'язку,передають сигнал квітирування (АСК), якщо прийнятий кадр даних прийнятий без помилки, іпередають сигнал негативного квітирування (NAK) тільки, якщо прийнятий кадр даних прийнятий з помилкою, але має енергію, щоб спільно з енергією повторної передачі кадру даних правильно...
Інформаційно-керуюча система адаптивного робота

Номер патенту: 42905
Опубліковано: 27.07.2009
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович
МПК: B25J 19/00
Мітки: інформаційно-керуюча, система, робота, адаптивного
Формула / Реферат:
Інформаційно-керуюча система адаптивного робота з одним входом та трьома виходами, що має у своєму складі послідовно з'єднані датчик проковзування й перший підсилювач, тактильний датчик, встановлений на одній з губок захватного пристрою робота, перший блок затримки, підсилювач потужності, привод губок захватного пристрою, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор та перший пороговий елемент, послідовно з'єднані...
Спосіб адаптації інтелектуального робота до маси об’єктів маніпулювання
Номер патенту: 41195
Опубліковано: 12.05.2009
Автори: Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович
МПК: G05B 19/00, B25J 19/02
Мітки: маси, робота, інтелектуального, об'єктів, спосіб, адаптації, маніпулювання
Формула / Реферат:
Спосіб адаптації інтелектуального робота до маси об'єктів маніпулювання, згідно з яким переміщують захватний орган з принаймні двома затискними губками таким чином, щоб об'єкт маніпулювання знаходився між затискними губками захватного органа в центрованому відносно губок положенні, після чого здійснюють стискання губок у напрямку скорочення відстані між ними і реєструють інформацію про одночасне контактування обох затискних губок з об'єктом...
Спосіб ідентифікації величини стискального зусилля інтелектуального робота
Номер патенту: 41120
Опубліковано: 12.05.2009
Автори: Кондратенко Юрій Пантелійович, Кондратенко Галина Володимирівна, Аль Суод Махмуд мохаммад Салем, Кондратенко Володимир Юрійович
МПК: B25J 19/02, G05B 19/00
Мітки: інтелектуального, ідентифікації, робота, величини, стискального, зусилля, спосіб
Формула / Реферат:
Спосіб ідентифікації величини стискального зусилля інтелектуального робота, згідно з яким переміщують захватний орган з двома затискними губками в область робочої зони робота, де знаходиться об'єкт маніпулювання, і орієнтують губки захватного органа таким чином, щоб між ними знаходився об'єкт маніпулювання, після чого здійснюють стискання губок захватного органа в напрямку скорочення відстані між нимиз контролюванням моментів контактування...
Пристрій ідентифікації та аналізу тактильних сигналів для інформаційно-керуючої системи адаптивного робота

Номер патенту: 40710
Опубліковано: 27.04.2009
Автори: Кондратенко Галина Володимирівна, Запорожець Юрій Михайлович, Кондратенко Юрій Пантелійович, Шишкін Олександр Сергійович
МПК: B25J 19/02
Мітки: сигналів, адаптивного, тактильних, ідентифікації, робота, інформаційно-керуючої, пристрій, аналізу, системі
Формула / Реферат:
Пристрій ідентифікації та аналізу тактильних сигналів для комп'ютерної інформаційно-керуючої системи адаптивного робота з одним входом та трьома виходами, що має у своєму складі послідовно з'єднані перший датчик проковзування деталі й перший підсилювач, тактильний датчик, встановлений на одній з губок захвата робота, перший блок затримки, привід губок захвата, перший елемент АБО, послідовно з'єднані перший RS-тригер, інтегратор, перший...
Датчик проковзування об’єкта маніпулювання адаптивного робота
Номер патенту: 36077
Опубліковано: 10.10.2008
Автори: Марковський Ігор Володимирович, Чернов Сергій Костянтинович, Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович, Кондратенко Галина Володимирівна
МПК: B25J 19/02
Мітки: об'єкта, адаптивного, робота, проковзування, датчик, маніпулювання
Формула / Реферат:
Датчик проковзування об'єкта маніпулювання адаптивного робота, що містить корпус, в якому розміщено магнітну систему, до складу якої входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на твірну поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входять...
Захоплювальний пристрій промислового робота

Номер патенту: 32260
Опубліковано: 12.05.2008
Автори: Павленко Іван Іванович, Годунко Максим Олегович, Мажара Віталій Анатолійович
МПК: B65H 9/10
Мітки: промислового, пристрій, захоплювальний, робота
Формула / Реферат:
Захоплювальний пристрій промислового робота, що складається з пневмоциліндра, в якому розміщені поршень зі штоком, та приєднаних до штока затискних важелів з чотирма призматичними затискними елементами, який відрізняється тим, що два призматичні затискні елементи виконано рухомими.
Датчик робота для реєстрації проковзування деталі
Номер патенту: 30356
Опубліковано: 25.02.2008
Автори: Чернов Сергій Констянтинович, Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович, Шишкін Олександр Сергійович, Марковський Ігор Володимирович
МПК: B25J 19/02
Мітки: реєстрації, робота, проковзування, датчик, деталі
Формула / Реферат:
Датчик робота для реєстрації проковзування деталі, що містить корпус, в якому розміщено магнітну систему, до складу якої входить циліндричний ролик, виконаний у вигляді принаймні одного замкнутого тороїдального намагніченого магнітопроводу з нанесеним на твірну поверхню ролика захисним пружним покриттям і з можливістю обертання ролика навколо своєї осі, та закріплений на корпусі магніточутливий елемент, до складу якого входить основний...
Багатофункціональний кистьовий пристрій робота
Номер патенту: 30067
Опубліковано: 11.02.2008
Автори: Марковський Ігор Володимирович, Чернов Сергій Костянтинович, Кондратенко Володимир Юрійович, Шишкін Олександр Сергійович, Кондратенко Юрій Пантелійович
МПК: B25J 15/00
Мітки: багатофункціональний, пристрій, робота, кистьовий
Формула / Реферат:
Багатофункціональний кистьовий пристрій робота, що містить дві пари захватних органів, основу, корпус, привід захватних органів, кінематично зв'язаний з гвинтовою парою, та перший зовнішній і перший внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, кожний затискний елемент першої пари захватних органів за допомогою відповідної пари шарнірно закріплених паралельних тяг кінематично зв'язано з гайкою...
Рушійний пристрій для підводного робота

Номер патенту: 27504
Опубліковано: 12.11.2007
Автори: Родічева Надія Іванівна, Данильченко Наталя В'ячеславівна, Пишнєв Сергій Миколайович, Данильченко Ігор Євгенович
МПК: B63H 20/00
Мітки: рушійній, підводного, робота, пристрій
Формула / Реферат:
1. Рушійний пристрій для підводного робота, що містить корпус з розташованим всередині електродвигуном із знижувальним редуктором і ведучим валом, гребні гвинти, встановлені на гребних валах і розміщені в насадці, який відрізняється тим, що гребні вали розміщені перпендикулярно до ведучого вала і з'єднані з останнім за допомогою конічної передачі, при цьому корпус електродвигуна закріплений зовні насадки.2. Рушійний пристрій за...
Адаптивний захватний пристрій інтелектуального робота
Номер патенту: 26252
Опубліковано: 10.09.2007
Автори: Марковський Ігор Володимирович, Кондратенко Володимир Юрійович, Кондратенко Юрій Пантелійович, Шишкін Олександр Сергійович, Швець Едуард Анатолійович, Чернов Сергій Костянтинович
МПК: B25J 15/00
Мітки: пристрій, робота, адаптивний, інтелектуального, захватний
Формула / Реферат:
Адаптивний захватний пристрій інтелектуального робота, що містить кінематично зв'язані з приводом губки, принаймні на одній з яких встановлено перший і другий датчики стискального зусилля, зв'язані з блоком керування приводом губок, у губках з можливістю плоскопаралельного та обертового переміщення встановлені пружно зв'язані з відповідною губкою рухливі елементи, які мають можливість взаємодії з першим датчиком стискального зусилля і другим...
Багатофункціональний кистьовий вузол промислового робота
Номер патенту: 24706
Опубліковано: 10.07.2007
Автори: Шишкін Олександр Сергійович, Чернов Сергій Костянтинович, Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович
МПК: B25J 15/00
Мітки: кистьовий, багатофункціональний, вузол, промислового, робота
Формула / Реферат:
Багатофункціональний кистьовий пристрій промислового робота, що містить дві пари захватних органів, основу, корпус, привід захватних органів, кінематично з'єднаний з гвинтовою парою, та зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, кожний затискний елемент першої пари захватних органів за допомогою відповідної пари шарнірно закріплених паралельних тяг кінематично зв'язано з гайкою...
Захватний пристрій промислового робота
Номер патенту: 24280
Опубліковано: 25.06.2007
Автори: Павленко Іван Іванович, Годунко Максим Олегович, Мажара Віталій Анатолійович
МПК: B23B 15/00, B23Q 7/04
Мітки: робота, промислового, пристрій, захватний
Формула / Реферат:
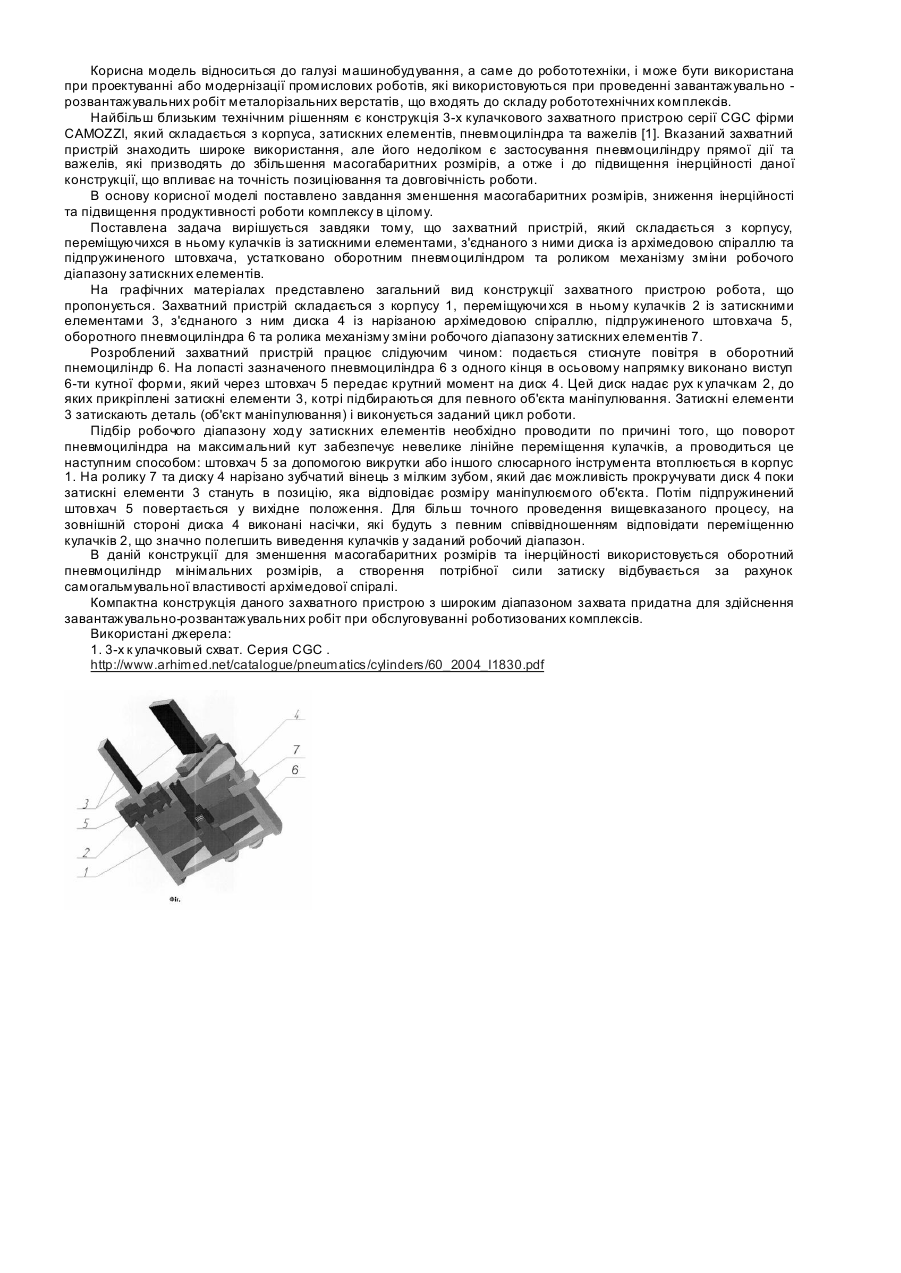
Захватний пристрій промислового робота, який складається з корпусу, кулачків із затискними елементами, що переміщуються в корпусі з'єднаного з ними диска із архімедовою спіраллю, та підпружиненого штовхача, який відрізняється тим, що його устатковано оборотним пневмоциліндром та роликом механізму зміни робочого діапазону затискних елементів.
Багатофункціональний кистьовий пристрій адаптивного робота
Номер патенту: 24270
Опубліковано: 25.06.2007
Автори: Кондратенко Володимир Юрійович, Швець Едуард Анатолійович, Кондратенко Юрій Пантелійович, Чернов Сергій Костянтинович, Марковський Ігор Володимирович
МПК: B25J 15/00
Мітки: кистьовий, адаптивного, робота, пристрій, багатофункціональний
Формула / Реферат:
Багатофункціональний кистьовий пристрій адаптивного робота, що містить дві пари захватних органів, основу, перший компонент головного корпусу, додатковий корпус, в якому закріплено привід захватних органів, кінематично зв'язаний з гвинтовою парою, зовнішній і внутрішній порожнинні циліндричні елементи, встановлені коаксіально гвинту гвинтової пари, та закріплений на основі перший керований фіксатор, виконаний у вигляді електромагніта, рухомий...