П’єзоелектричний двигун
Номер патенту: 36957
Опубліковано: 16.04.2001
Автори: Шепелєв Анатолій Олександрович, Зіненко Володимир Миколайович


Текст
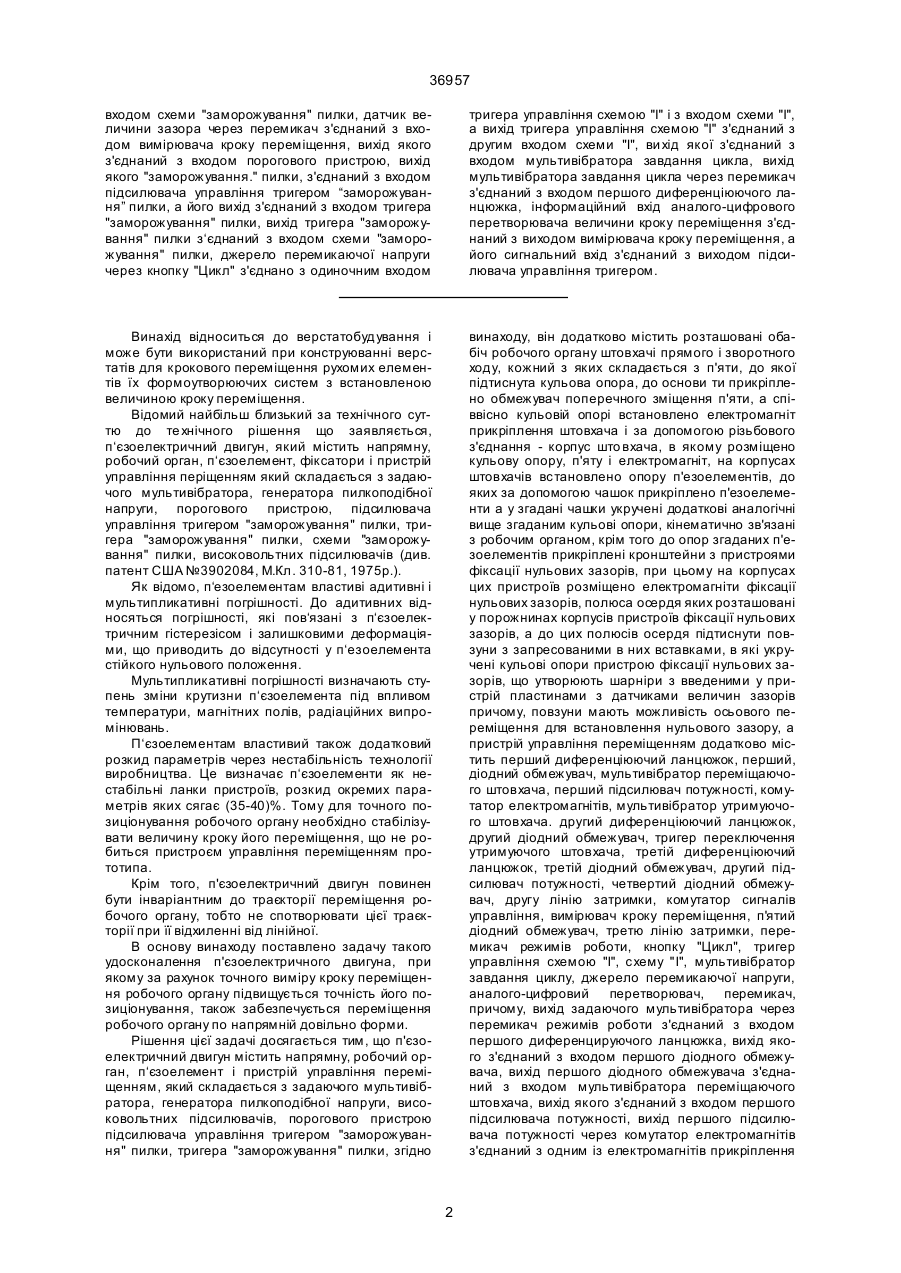
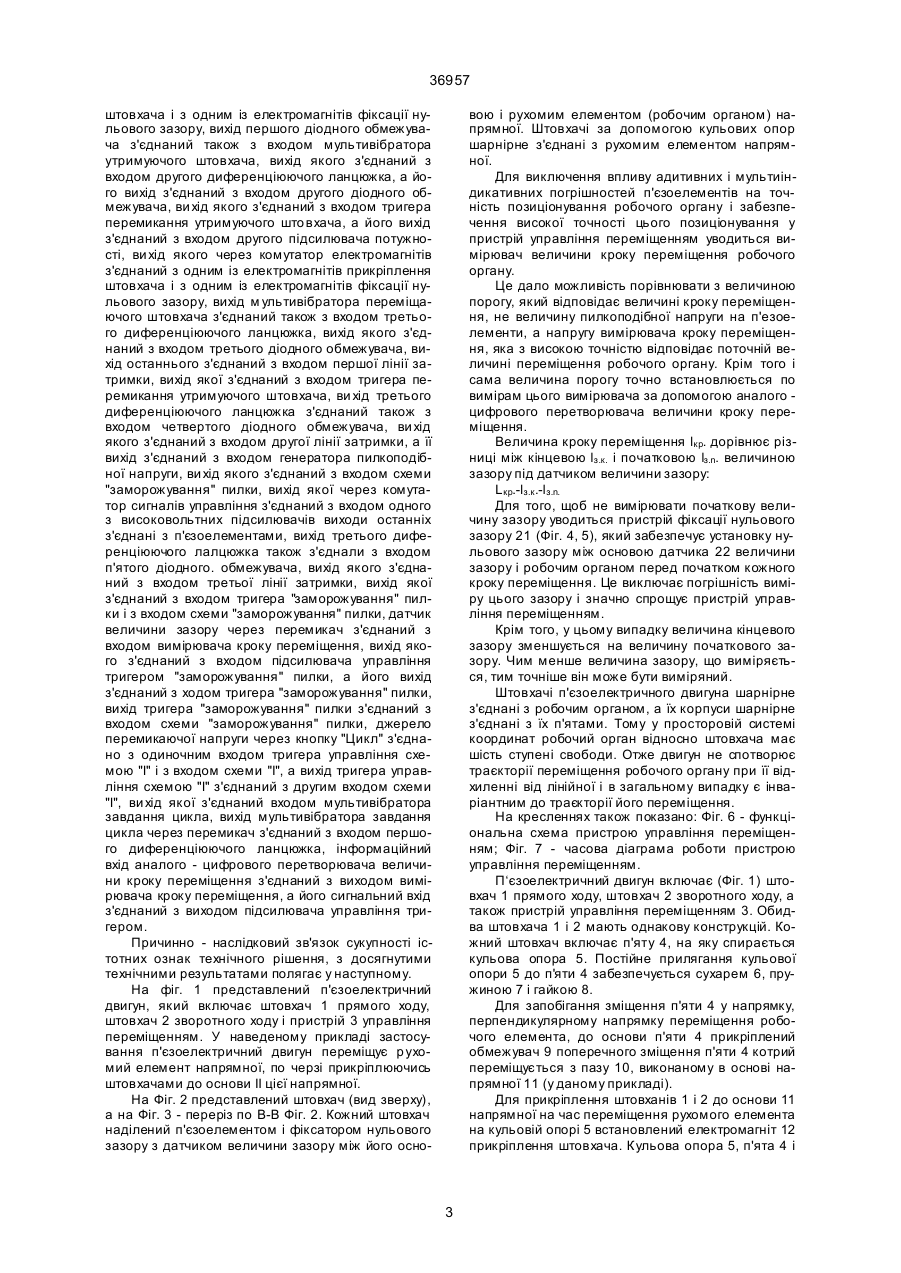
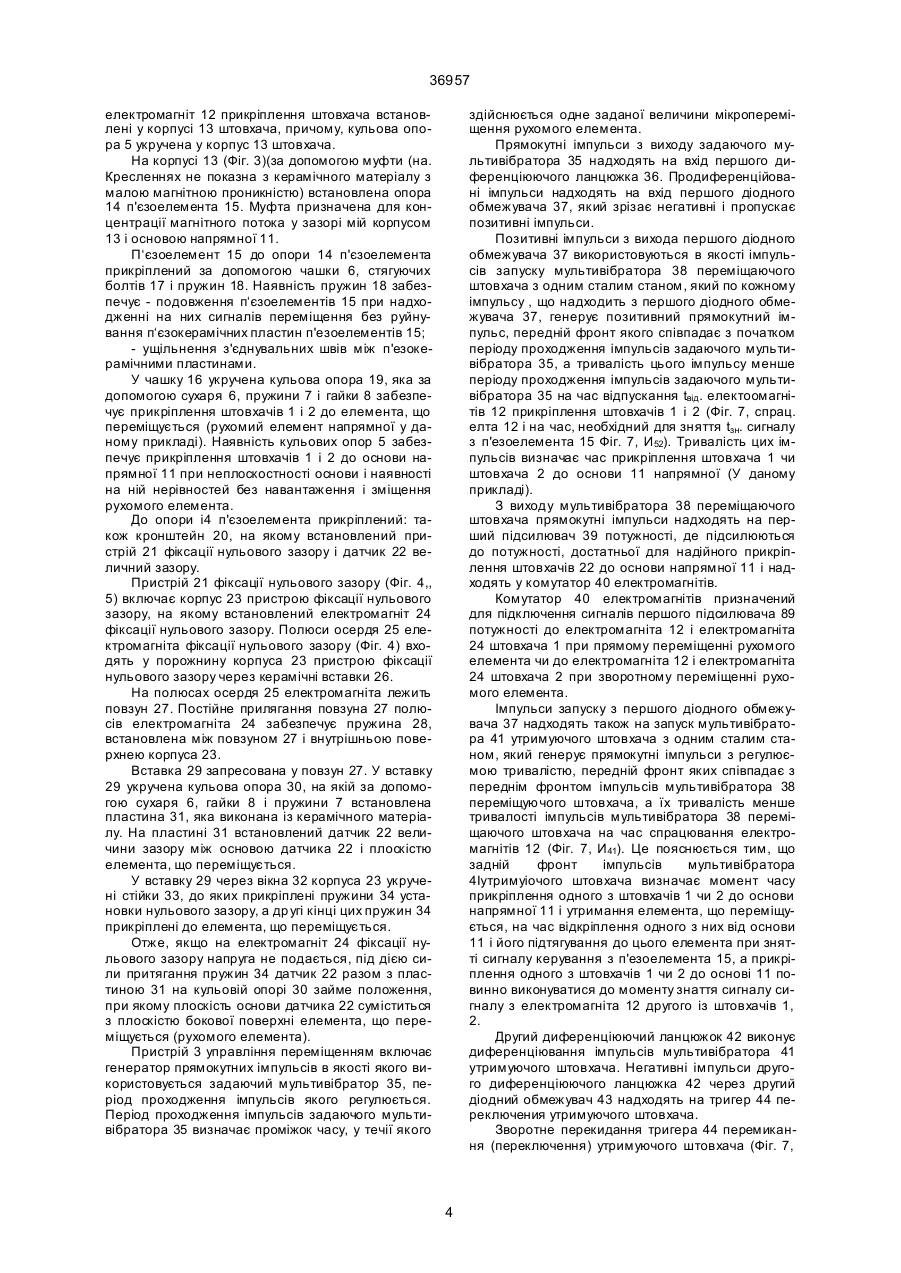
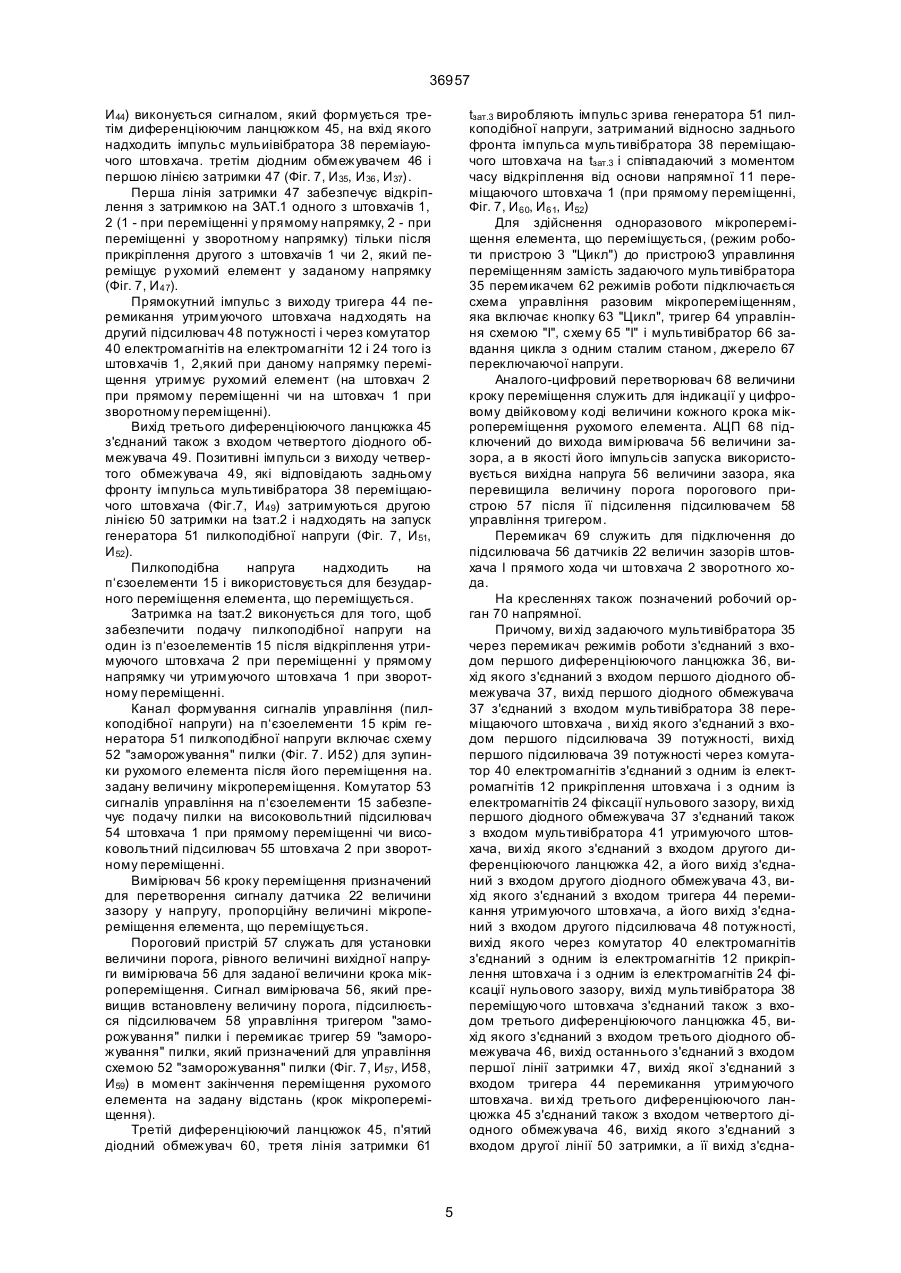
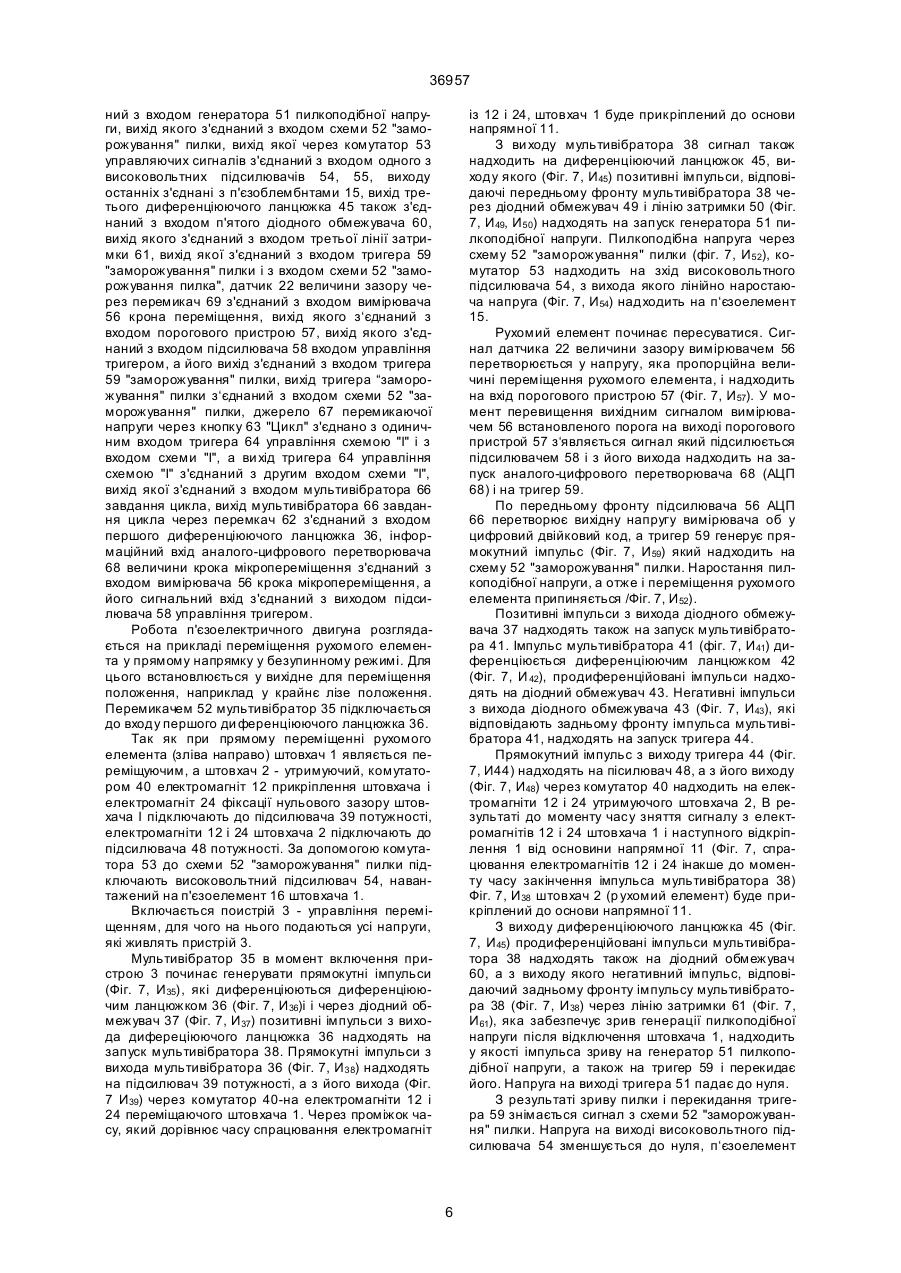
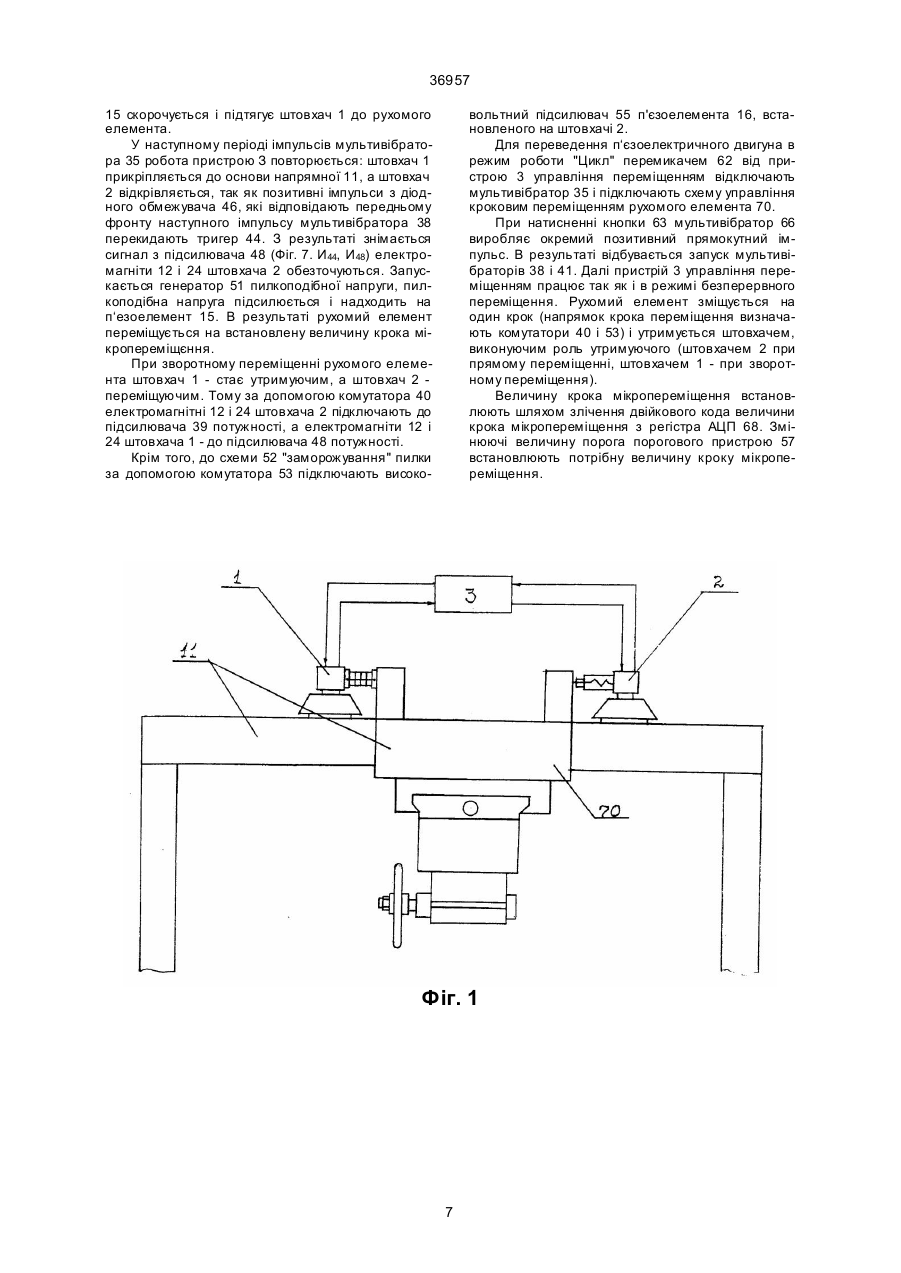
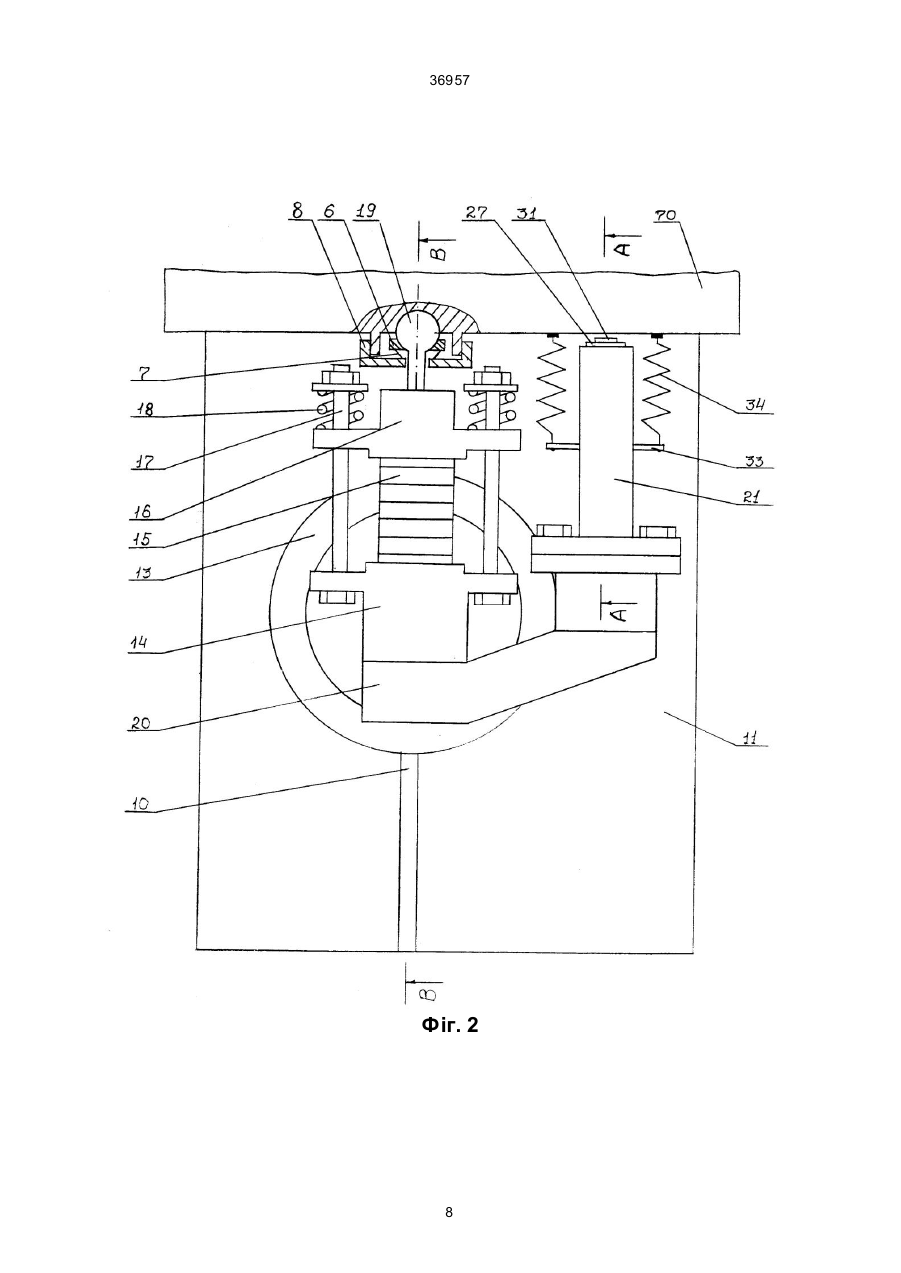
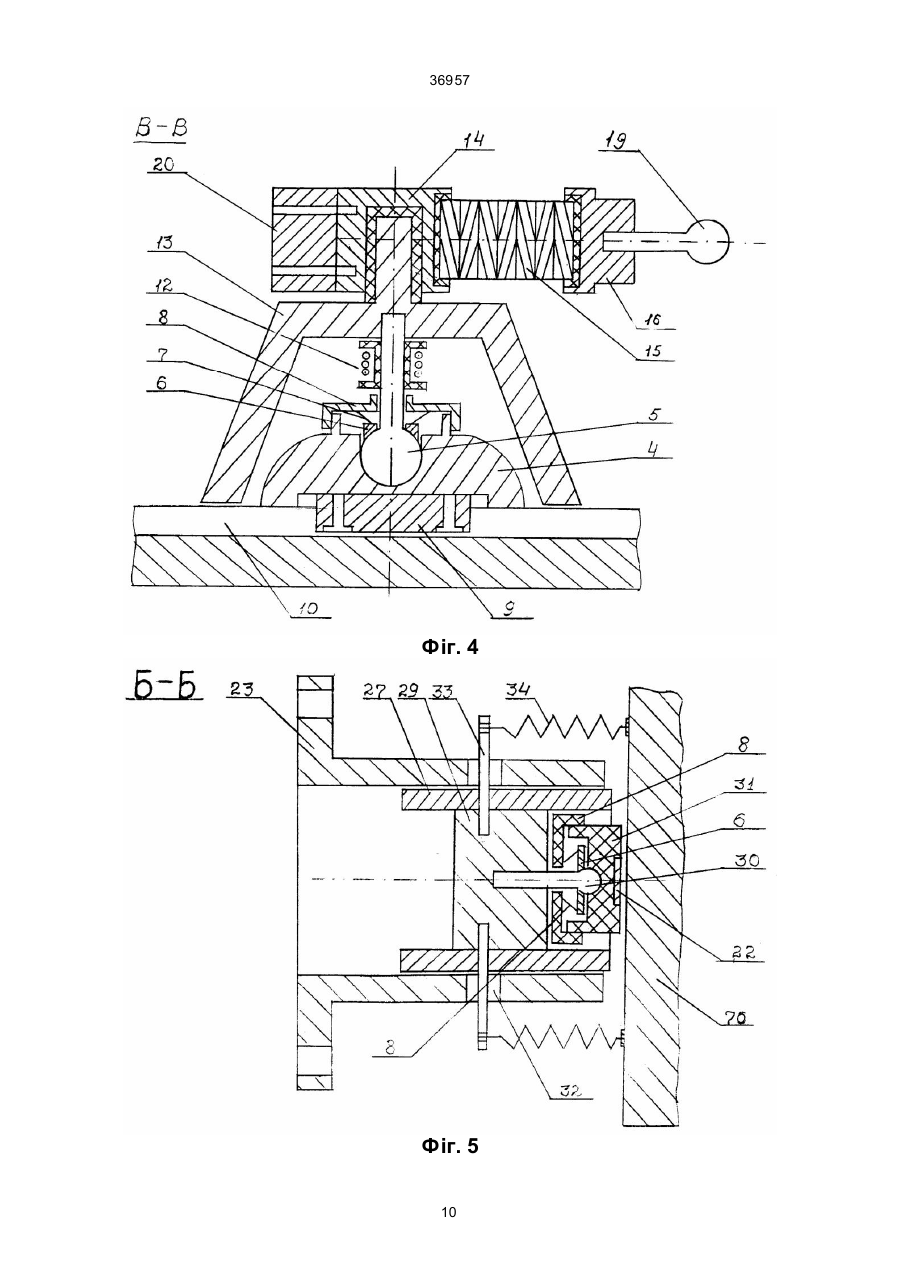
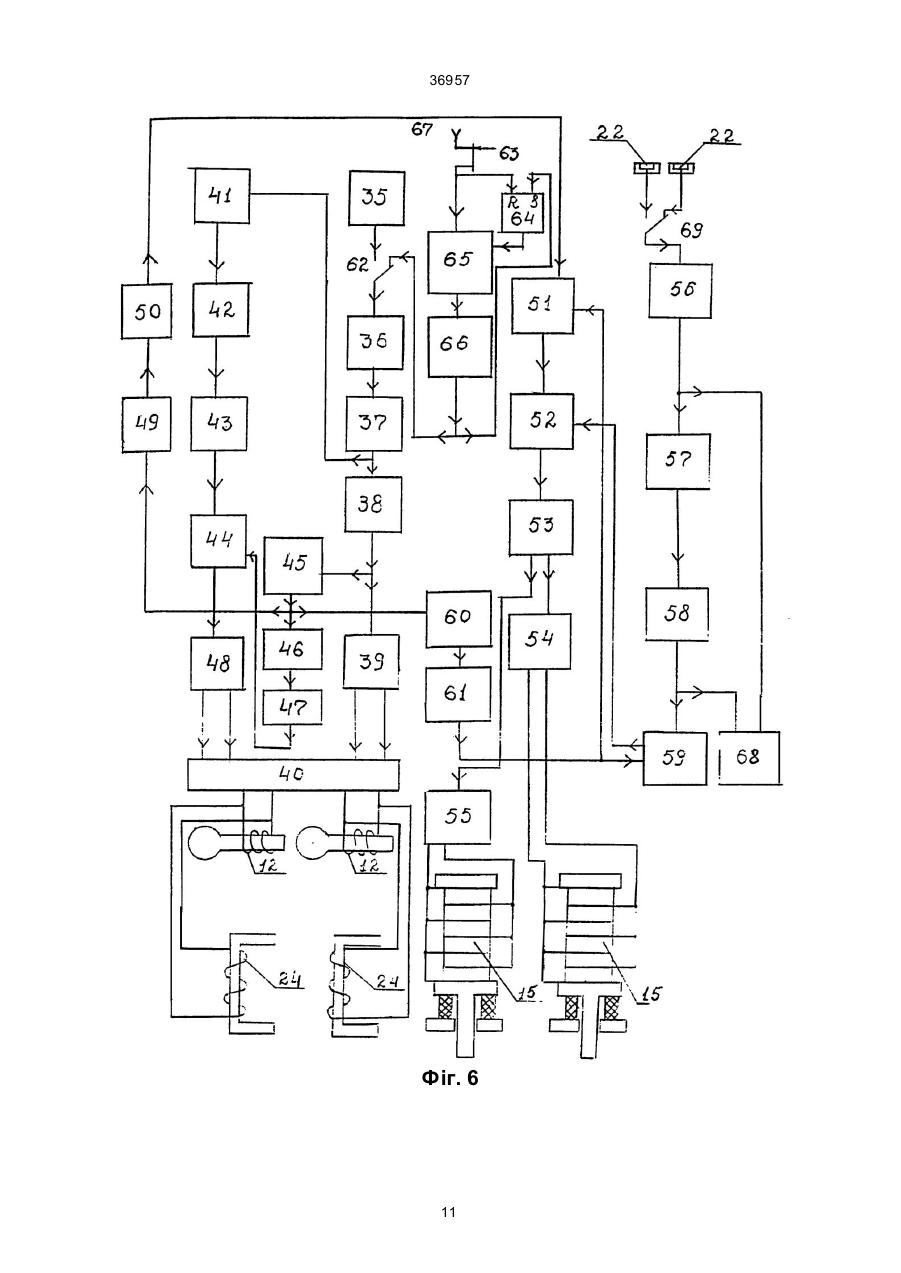
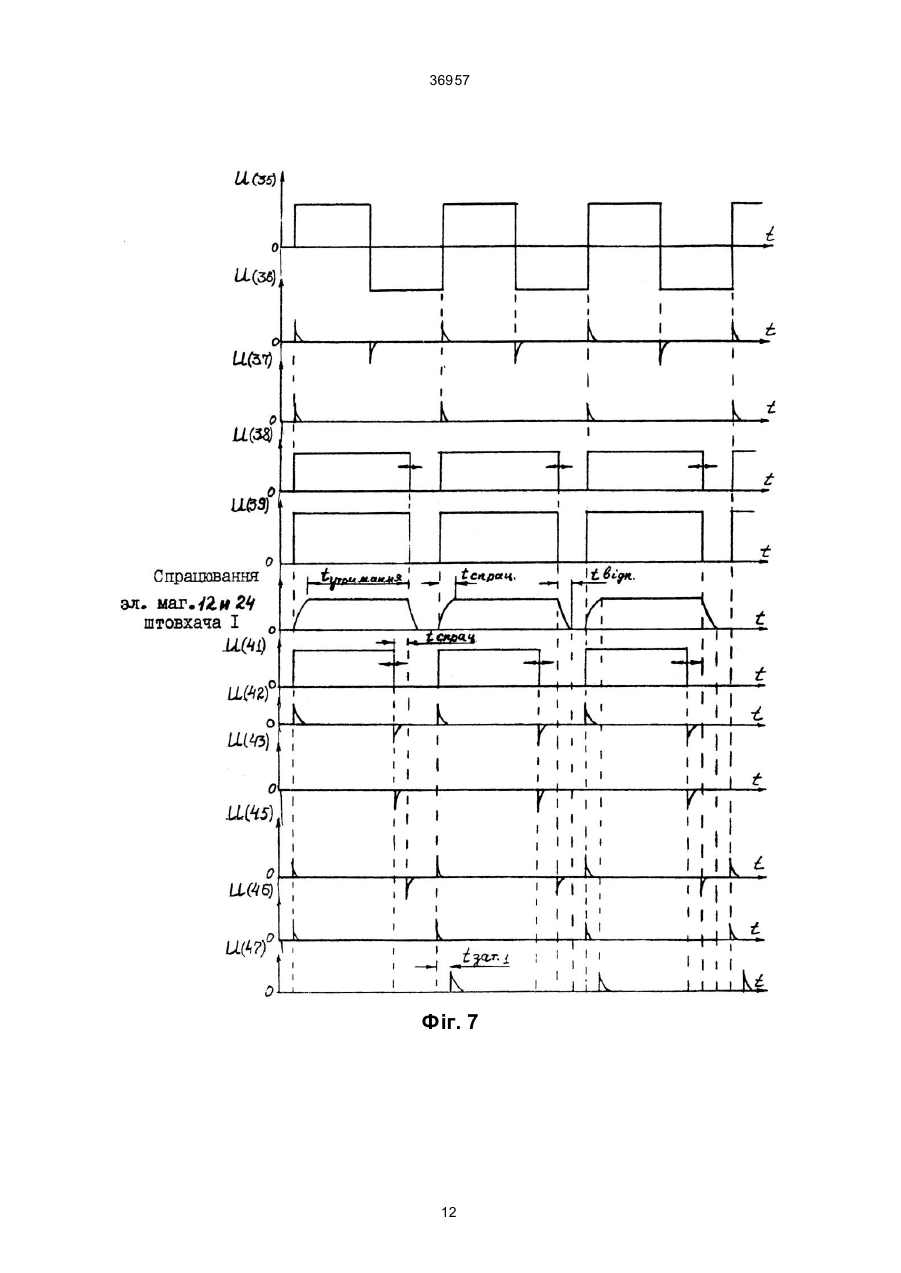
П'єзоелектричний двигун, що містить напрямну, робочий орган, п'езоелемент і пристрій управління переміщенням, який складається з задаючого мультивібратора, генератора пилкоподібної напруги, високовольтних підсилювачів, порогового пристрою, підсилювача управління тригером "заморожування" пилки, тригер "заморожування" пилки, який відрізняється тим, що він додатково містить" розташовані обабіч робочого органу штовхачі прямого і зворотного ходу, кожний з яких складається з п'яти, до якої підтиснута кульова опора, до основи п'яти прикріплено обмежувач поперечного зміщення п'яти, а співвісно кульовій опорі встановлено електромагніт прикріплення штовхача і за допомогою різьбового з'єднання - корпус штовхача, в якому розміщено кульову опору, п'яту і електромагніт, на корпусах штовхачі встановлено опори п'єзоелементів, до яких за допомогою чашок прикріплено п'єзоелементи, а у згадані чашки укручені додаткові аналогічні вище згаданим кульові опори, кінематично зв'язані з робочим органом, крім того до опор згаданих п'езоелементів прикріплені кронштейни з пристроями фіксації нульових зазорів, при цьому на корпусах ци х пристроїв розміщено електромагніти фіксації нульових зазорів, полюса осердя яких розташовані у порожнинах корпусів пристроїв фіксації нульових зазорів, а до цих полюсів осердя підтиснуті повзуни з запресованими в них вставками, в які укручені кульові опори пристрою фіксації, що утворюють шарніри з введеними у пристрій пластинами з датчиками величин зазорів, причому повзуни мають можливість осьового переміщення для встановлення нульового зазору, а пристрій управління переміщенням додатково містить перший диференціюючий ланцюжок, перший діодний обмежувач, мультивібратор переміщуючого штовхача, перший підсилювач потужності, комутатор електромагнітів, мультивібратор утримуючого штовхача, др угий диференціюючий ланцюжок, другий діодний обмежувач, тригер переключення утримуючого штовхача, третій A (54) П'ЄЗОЕЛЕКТРИЧНИЙ ДВИГУН 36957 входом схеми "заморожування" пилки, датчик величини зазора через перемикач з'єднаний з входом вимірювача кроку переміщення, вихід якого з'єднаний з входом порогового пристрою, вихід якого "заморожування." пилки, з'єднаний з входом підсилювача управління тригером “заморожування” пилки, а його вихід з'єднаний з входом тригера "заморожування" пилки, вихід тригера "заморожування" пилки з‘єднаний з входом схеми "заморожування" пилки, джерело перемикаючої напруги через кнопку "Цикл" з'єднано з одиночним входом тригера управління схемою "І" і з входом схеми "І", а вихід тригера управління схемою "І" з'єднаний з другим входом схеми "І", ви хід якої з'єднаний з входом мультивібратора завдання цикла, вихід мультивібратора завдання цикла через перемикач з'єднаний з входом першого диференціюючого ланцюжка, інформаційний вхід аналого-цифрового перетворювача величини кроку переміщення з'єднаний з виходом вимірювача кроку переміщення, а його сигнальний вхід з'єднаний з виходом підсилювача управління тригером. Винахід відноситься до верстатобудування і може бути використаний при конструюванні верстатів для крокового переміщення рухомих елементів їх формоутворюючих систем з встановленою величиною кроку переміщення. Відомий найбільш близький за технічного суттю до те хнічного рішення що заявляється, п‘єзоелектричний двигун, який містить напрямну, робочий орган, п‘єзоелемент, фіксатори і пристрій управління періщенням який складається з задаючого мультивібратора, генератора пилкоподібної напруги, порогового пристрою, підсилювача управління тригером "заморожування" пилки, тригера "заморожування" пилки, схеми "заморожування" пилки, високовольтних підсилювачів (див. патент США №3902084, М.Кл. 310-81, 1975р.). Як відомо, п‘езоелементам властиві адитивні і мультипликативні погрішності. До адитивних відносяться погрішності, які пов‘язані з п‘єзоелектричним гістерезісом і залишковими деформаціями, що приводить до відсутності у п‘езоелемента стійкого нульового положення. Мультипликативні погрішності визначають ступень зміни крутизни п‘єзоелемента під впливом температури, магнітних полів, радіаційних випромінювань. П‘єзоелементам властивий також додатковий розкид параметрів через нестабільність технології виробництва. Це визначає п‘єзоелементи як нестабільні ланки пристроїв, розкид окремих параметрів яких сягає (35-40)%. Тому для точного позиціонування робочого органу необхідно стабілізувати величину кроку його переміщення, що не робиться пристроєм управління переміщенням прототипа. Крім того, п'єзоелектричний двигун повинен бути інваріантним до траєкторії переміщення робочого органу, тобто не спотворювати цієї траєкторії при її відхиленні від лінійної. В основу винаходу поставлено задачу такого удосконалення п'єзоелектричного двигуна, при якому за рахунок точного виміру кроку переміщення робочого органу підвищується точність його позиціонування, також забезпечується переміщення робочого органу по напрямній довільно форми. Рішення цієї задачі досягається тим, що п'єзоелектричний двигун містить напрямну, робочий орган, п‘єзоелемент і пристрій управління переміщенням, який складається з задаючого мультивібратора, генератора пилкоподібної напруги, високовольтних підсилювачів, порогового пристрою підсилювача управління тригером "заморожування" пилки, тригера "заморожування" пилки, згідно винаходу, він додатково містить розташовані обабіч робочого органу штовхачі прямого і зворотного ходу, кожний з яких складається з п'яти, до якої підтиснута кульова опора, до основи ти прикріплено обмежувач поперечного зміщення п'яти, а співвісно кульовій опорі встановлено електромагніт прикріплення штовхача і за допомогою різьбового з'єднання - корпус што вхача, в якому розміщено кульову опору, п'яту і електромагніт, на корпусах штовхачів встановлено опору п'езоелементів, до яких за допомогою чашок прикріплено п'езоелементи а у згадані чашки укручені додаткові аналогічні вище згаданим кульові опори, кінематично зв'язані з робочим органом, крім того до опор згаданих п'езоелементів прикріплені кронштейни з пристроями фіксації нульових зазорів, при цьому на корпусах цих пристроїв розміщено електромагніти фіксації нульових зазорів, полюса осердя яких розташовані у порожнинах корпусів пристроїв фіксації нульових зазорів, а до цих полюсів осердя підтиснути повзуни з запресованими в них вставками, в які укручені кульові опори пристрою фіксації нульових зазорів, що утворюють шарніри з введеними у пристрій пластинами з датчиками величин зазорів причому, повзуни мають можливість осьового переміщення для встановлення нульового зазору, а пристрій управління переміщенням додатково містить перший диференціюючий ланцюжок, перший, діодний обмежувач, мультивібратор переміщаючого штовхача, перший підсилювач потужності, комутатор електромагнітів, мультивібратор утримуючого штовхача. другий диференціюючий ланцюжок, другий діодний обмежувач, тригер переключення утримуючого штовхача, третій диференціюючий ланцюжок, третій діодний обмежувач, другий підсилювач потужності, четвертий діодний обмежувач, другу лінію затримки, комутатор сигналів управління, вимірювач кроку переміщення, п'ятий діодний обмежувач, третю лінію затримки, перемикач режимів роботи, кнопку "Цикл", тригер управління схемою "І", схему "І", мультивібратор завдання циклу, джерело перемикаючої напруги, аналого-цифровий перетворювач, перемикач, причому, вихід задаючого мультивібратора через перемикач режимів роботи з'єднаний з входом першого диференцируючого ланцюжка, вихід якого з'єднаний з входом першого діодного обмежувача, вихід першого діодного обмежувача з'єднаний з входом мультивібратора переміщаючого штовхача, вихід якого з'єднаний з входом першого підсилювача потужності, вихід першого підсилювача потужності через комутатор електромагнітів з'єднаний з одним із електромагнітів прикріплення 2 36957 штовхача і з одним із електромагнітів фіксації нульового зазору, вихід першого діодного обмежувача з'єднаний також з входом мультивібратора утримуючого штовхача, вихід якого з'єднаний з входом другого диференціюючого ланцюжка, а його вихід з'єднаний з входом другого діодного обмежувача, ви хід якого з'єднаний з входом тригера перемикання утримуючого што вхача, а його вихід з'єднаний з входом другого підсилювача потужності, ви хід якого через комутатор електромагнітів з'єднаний з одним із електромагнітів прикріплення штовхача і з одним із електромагнітів фіксації нульового зазору, вихід м ультивібратора переміщаючого штовхача з'єднаний також з входом третього диференціюючого ланцюжка, вихід якого з'єднаний з входом третього діодного обмежувача, вихід останнього з'єднаний з входом першої лінії затримки, вихід якої з'єднаний з входом тригера перемикання утримуючого штовхача, ви хід третього диференціюючого ланцюжка з'єднаний також з входом четвертого діодного обмежувача, ви хід якого з'єднаний з входом другої лінії затримки, а її вихід з'єднаний з входом генератора пилкоподібної напруги, ви хід якого з'єднаний з входом схеми "заморожування" пилки, вихід якої через комутатор сигналів управління з'єднаний з входом одного з високовольтних підсилювачів виходи останніх з'єднані з п'єзоелементами, вихід третього диференціюючого лалцюжка також з'єднали з входом п'ятого діодного. обмежувача, вихід якого з'єднаний з входом третьої лінії затримки, вихід якої з'єднаний з входом тригера "заморожування" пилки і з входом схеми "заморожування" пилки, датчик величини зазору через перемикач з'єднаний з входом вимірювача кроку переміщення, вихід якого з'єднаний з входом підсилювача управління тригером "заморожування" пилки, а його вихід з'єднаний з ходом тригера "заморожування" пилки, вихід тригера "заморожування" пилки з'єднаний з входом схеми "заморожування" пилки, джерело перемикаючої напруги через кнопку "Цикл" з'єднано з одиночним входом тригера управління схемою "І" і з входом схеми "І", а вихід тригера управління схемою "І" з'єднаний з другим входом схеми "І", ви хід якої з'єднаний входом мультивібратора завдання цикла, вихід мультивібратора завдання цикла через перемикач з'єднаний з входом першого диференціюючого ланцюжка, інформаційний вхід аналого - цифрового перетворювача величини кроку переміщення з'єднаний з виходом вимірювача кроку переміщення, а його сигнальний вхід з'єднаний з виходом підсилювача управління тригером. Причинно - наслідковий зв'язок сукупності істотних ознак технічного рішення, з досягнутими технічними результатами полягає у наступному. На фіг. 1 представлений п'єзоелектричний двигун, який включає штовхач 1 прямого ходу, штовхач 2 зворотного ходу і пристрій 3 управління переміщенням. У наведеному прикладі застосування п'єзоелектричний двигун переміщує р ухомий елемент напрямної, по черзі прикріплюючись штовхачами до основи II цієї напрямної. На Фіг. 2 представлений штовхач (вид зверху), а на Фіг. 3 - переріз по В-В Фіг. 2. Кожний штовхач наділений п'єзоелементом і фіксатором нульового зазору з датчиком величини зазору між його осно вою і рухомим елементом (робочим органом) напрямної. Штовхачі за допомогою кульових опор шарнірне з'єднані з рухомим елементом напрямної. Для виключення впливу адитивних і мультиіндикативних погрішностей п'єзоелементів на точність позиціонування робочого органу і забезпечення високої точності цього позиціонування у пристрій управління переміщенням уводиться вимірювач величини кроку переміщення робочого органу. Це дало можливість порівнювати з величиною порогу, який відповідає величині кроку переміщення, не величину пилкоподібної напруги на п'езоелементи, а напругу вимірювача кроку переміщення, яка з високою точністю відповідає поточній величині переміщення робочого органу. Крім того і сама величина порогу точно встановлюється по вимірам цього вимірювача за допомогою аналого цифрового перетворювача величини кроку переміщення. Величина кроку переміщення lкр. дорівнює різниці між кінцевою lз.к. і початковою lз.n. величиною зазору під датчиком величини зазору: Lкр.-lз.к .-lз.n. Для того, щоб не вимірювати початкову величину зазору уводиться пристрій фіксації нульового зазору 21 (Фіг. 4, 5), який забезпечує установку нульового зазору між основою датчика 22 величини зазору і робочим органом перед початком кожного кроку переміщення. Це виключає погрішність виміру цього зазору і значно спрощує пристрій управління переміщенням. Крім того, у цьому випадку величина кінцевого зазору зменшується на величину початкового зазору. Чим менше величина зазору, що виміряється, тим точніше він може бути виміряний. Штовхачі п'єзоелектричного двигуна шарнірне з'єднані з робочим органом, а їх корпуси шарнірне з'єднані з їх п'ятами. Тому у просторовій системі координат робочий орган відносно штовхача має шість ступені свободи. Отже двигун не спотворює траєкторії переміщення робочого органу при її відхиленні від лінійної і в загальному випадку є інваріантним до траєкторії його переміщення. На кресленнях також показано: Фіг. 6 - функціональна схема пристрою управління переміщенням; Фіг. 7 - часова діаграма роботи пристрою управління переміщенням. П‘єзоелектричний двигун включає (Фіг. 1) штовхач 1 прямого ходу, штовхач 2 зворотного ходу, а також пристрій управління переміщенням 3. Обидва штовхача 1 і 2 мають однакову конструкцій. Кожний штовхач включає п'яту 4, на яку спирається кульова опора 5. Постійне прилягання кульової опори 5 до п'яти 4 забезпечується сухарем 6, пружиною 7 і гайкою 8. Для запобігання зміщення п'яти 4 у напрямку, перпендикулярному напрямку переміщення робочого елемента, до основи п'яти 4 прикріплений обмежувач 9 поперечного зміщення п'яти 4 котрий переміщується з пазу 10, виконаному в основі напрямної 11 (у даному прикладі). Для прикріплення штовханів 1 і 2 до основи 11 напрямної на час переміщення рухомого елемента на кульовій опорі 5 встановлений електромагніт 12 прикріплення штовхача. Кульова опора 5, п'ята 4 і 3 36957 електромагніт 12 прикріплення штовхача встановлені у корпусі 13 штовхача, причому, кульова опора 5 укручена у корпус 13 штовхача. На корпусі 13 (Фіг. 3)(за допомогою муфти (на. Кресленнях не показна з керамічного матеріалу з малою магнітною проникністю) встановлена опора 14 п'єзоелемента 15. Муфта призначена для концентрації магнітного потока у зазорі мій корпусом 13 і основою напрямної 11. П‘єзоелемент 15 до опори 14 п'єзоелемента прикріплений за допомогою чашки 6, стягуючих болтів 17 і пружин 18. Наявність пружин 18 забезпечує - подовження п‘єзоелементів 15 при надходженні на них сигналів переміщення без руйнування п‘єзокерамічних пластин п'езоелементів 15; - ущільнення з'єднувальних швів між п'езокерамічними пластинами. У чашку 16 укручена кульова опора 19, яка за допомогою сухаря 6, пружини 7 і гайки 8 забезпечує прикріплення штовхачів 1 і 2 до елемента, що переміщується (рухомий елемент напрямної у даному прикладі). Наявність кульових опор 5 забезпечує прикріплення штовхачів 1 і 2 до основи напрямної 11 при неплоскостності основи і наявності на ній нерівностей без навантаження і зміщення рухомого елемента. До опори і4 п'єзоелемента прикріплений: також кронштейн 20, на якому встановлений пристрій 21 фіксації нульового зазору і датчик 22 величний зазору. Пристрій 21 фіксації нульового зазору (Фіг. 4,, 5) включає корпус 23 пристрою фіксації нульового зазору, на якому встановлений електромагніт 24 фіксації нульового зазору. Полюси осердя 25 електромагніта фіксації нульового зазору (Фіг. 4) входять у порожнину корпуса 23 пристрою фіксації нульового зазору через керамічні вставки 26. На полюсах осердя 25 електромагніта лежить повзун 27. Постійне прилягання повзуна 27 полюсів електромагніта 24 забезпечує пружина 28, встановлена між повзуном 27 і внутрішньою поверхнею корпуса 23. Вставка 29 запресована у повзун 27. У вставку 29 укручена кульова опора 30, на якій за допомогою сухаря 6, гайки 8 і пружини 7 встановлена пластина 31, яка виконана із керамічного матеріалу. На пластині 31 встановлений датчик 22 величини зазору між основою датчика 22 і плоскістю елемента, що переміщується. У вставку 29 через вікна 32 корпуса 23 укручені стійки 33, до яких прикріплені пружини 34 установки нульового зазору, а др угі кінці цих пружин 34 прикріплені до елемента, що переміщується. Отже, якщо на електромагніт 24 фіксації нульового зазору напруга не подається, під дією сили притягання пружин 34 датчик 22 разом з пластиною 31 на кульовій опорі 30 займе положення, при якому плоскість основи датчика 22 суміститься з плоскістю бокової поверхні елемента, що переміщується (рухомого елемента). Пристрій 3 управління переміщенням включає генератор прямокутних імпульсів в якості якого використовується задаючий мультивібратор 35, період проходження імпульсів якого регулюється. Період проходження імпульсів задаючого мультивібратора 35 визначає проміжок часу, у течії якого здійснюється одне заданої величини мікропереміщення рухомого елемента. Прямокутні імпульси з виходу задаючого мультивібратора 35 надходять на вхід першого диференціюючого ланцюжка 36. Продиференційовані імпульси надходять на вхід першого діодного обмежувача 37, який зрізає негативні і пропускає позитивні імпульси. Позитивні імпульси з вихода першого діодного обмежувача 37 використовуються в якості імпульсів запуску мультивібратора 38 переміщаючого штовхача з одним сталим станом, який по кожному імпульсу , що надходить з першого діодного обмежувача 37, генерує позитивний прямокутний імпульс, передній фронт якого співпадає з початком періоду проходження імпульсів задаючого мультивібратора 35, а тривалість цього імпульсу менше періоду проходження імпульсів задаючого мультивібратора 35 на час відпускання tвід. електоомагнітів 12 прикріплення штовхачів 1 і 2 (Фіг. 7, спрац. елта 12 і на час, необхідний для зняття tзн. сигналу з п'езоелемента 15 Фіг. 7, И 52). Тривалість цих імпульсів визначає час прикріплення штовхача 1 чи штовхача 2 до основи 11 напрямної (У даному прикладі). З виходу мультивібратора 38 переміщаючого штовхача прямокутні імпульси надходять на перший підсилювач 39 потужності, де підсилюються до потужності, достатньої для надійного прикріплення штовхачів 22 до основи напрямної 11 і надходять у комутатор 40 електромагнітів. Комутатор 40 електромагнітів призначений для підключення сигналів першого підсилювача 89 потужності до електромагніта 12 і електромагніта 24 штовхача 1 при прямому переміщенні рухомого елемента чи до електромагніта 12 і електромагніта 24 штовхача 2 при зворотному переміщенні рухомого елемента. Імпульси запуску з першого діодного обмежувача 37 надходять також на запуск мультивібратора 41 утримуючого штовхача з одним сталим станом, який генерує прямокутні імпульси з регулюємою тривалістю, передній фронт яких співпадає з переднім фронтом імпульсів мультивібратора 38 переміщуючого штовхача, а їх тривалість менше тривалості імпульсів мультивібратора 38 переміщаючого штовхача на час спрацювання електромагнітів 12 (Фіг. 7, И 41). Це пояснюється тим, що задній фронт імпульсів мультивібратора 4Іутримуіочого штовхача визначає момент часу прикріплення одного з штовхачів 1 чи 2 до основи напрямної 11 і утримання елемента, що переміщується, на час відкріплення одного з них від основи 11 і його підтягування до цього елемента при знятті сигналу керування з п'езоелемента 15, а прикріплення одного з штовхачів 1 чи 2 до основі 11 повинно виконуватися до моменту знаття сигналу сигналу з електромагніта 12 другого із штовхачів 1, 2. Другий диференціюючий ланцюжок 42 виконує диференціювання імпульсів мультивібратора 41 утримуючого штовхача. Негативні імпульси другого диференціюючого ланцюжка 42 через другий діодний обмежувач 43 надходять на тригер 44 переключения утримуючого штовхача. Зворотне перекидання тригера 44 перемикання (переключення) утримуючого штовхача (Фіг. 7, 4 36957 И 44) виконується сигналом, який формується третім диференціюючим ланцюжком 45, на вхід якого надходить імпульс мульиівібратора 38 переміауючого штовхача. третім діодним обмежувачем 46 і першою лінією затримки 47 (Фіг. 7, И 35, И 36 , И 37). Перша лінія затримки 47 забезпечує відкріплення з затримкою на ЗАТ.1 одного з штовхачів 1, 2 (1 - при переміщенні у прямому напрямку, 2 - при переміщенні у зворотному напрямку) тільки після прикріплення другого з штовхачів 1 чи 2, який переміщує р ухомий елемент у заданому напрямку (Фіг. 7, И 47). Прямокутний імпульс з виходу тригера 44 перемикання утримуючого штовхача надходять на другий підсилювач 48 потужності і через комутатор 40 електромагнітів на електромагніти 12 і 24 того із штовхачів 1, 2,який при даному напрямку переміщення утримує рухомий елемент (на штовхач 2 при прямому переміщенні чи на штовхач 1 при зворотному переміщенні). Вихід третього диференціюючого ланцюжка 45 з'єднаний також з входом четвертого діодного обмежувача 49. Позитивні імпульси з виходу четвертого обмежувача 49, які відповідають задньому фронту імпульса мультивібратора 38 переміщаючого штовхача (Фіг.7, И 49) затримуються другою лінією 50 затримки на tзат.2 і надходять на запуск генератора 51 пилкоподібної напруги (Фіг. 7, И 51, И 52). Пилкоподібна напруга надходить на п‘єзоелементи 15 і використовується для безударного переміщення елемента, що переміщується. Затримка на tзат.2 виконується для того, щоб забезпечити подачу пилкоподібної напруги на один із п‘езоелементів 15 після відкріплення утримуючого штовхача 2 при переміщенні у прямому напрямку чи утримуючого штовхача 1 при зворотному переміщенні. Канал формування сигналів управління (пилкоподібної напруги) на п‘єзоелементи 15 крім генератора 51 пилкоподібної напруги включає схему 52 "заморожування" пилки (Фіг. 7. И52) для зупинки рухомого елемента після його переміщення на. задану величину мікропереміщення. Комутатор 53 сигналів управління на п‘єзоелементи 15 забезпечує подачу пилки на високовольтний підсилювач 54 штовхача 1 при прямому переміщенні чи високовольтний підсилювач 55 штовхача 2 при зворотному переміщенні. Вимірювач 56 кроку переміщення призначений для перетворення сигналу датчика 22 величини зазору у напругу, пропорційну величині мікропереміщення елемента, що переміщується. Пороговий пристрій 57 служать для установки величини порога, рівного величині вихідної напруги вимірювача 56 для заданої величини крока мікропереміщення. Сигнал вимірювача 56, який превищив встановлену величину порога, підсилюється підсилювачем 58 управління тригером "заморожування" пилки і перемикає тригер 59 "заморожування" пилки, який призначений для управління схемою 52 "заморожування" пилки (Фіг. 7, И 57 , И58, И 59) в момент закінчення переміщення рухомого елемента на задану відстань (крок мікропереміщення). Третій диференціюючий ланцюжок 45, п'ятий діодний обмежувач 60, третя лінія затримки 61 tзат.3 виробляють імпульс зрива генератора 51 пилкоподібної напруги, затриманий відносно заднього фронта імпульса мультивібратора 38 переміщаючого штовхача на tзат.3 і співпадаючий з моментом часу відкріплення від основи напрямної 11 переміщаючого штовхача 1 (при прямому переміщенні, Фіг. 7, И 60, И 61, И 52) Для здійснення одноразового мікропереміщення елемента, що переміщується, (режим роботи пристрою 3 "Цикл") до пристроюЗ управлиння переміщенням замість задаючого мультивібратора 35 перемикачем 62 режимів роботи підключається схема управління разовим мікропереміщенням, яка включає кнопку 63 "Цикл", тригер 64 управління схемою "І", схему 65 "І" і мультивібратор 66 завдання цикла з одним сталим станом, джерело 67 переключаючої напруги. Аналого-цифровий перетворювач 68 величини кроку переміщення служить для індикації у цифровому двійковому коді величини кожного крока мікропереміщення рухомого елемента. АЦП 68 підключений до вихода вимірювача 56 величини зазора, а в якості його імпульсів запуска використовується вихідна напруга 56 величини зазора, яка перевищила величину порога порогового пристрою 57 після її підсилення підсилювачем 58 управління тригером. Перемикач 69 служить для підключення до підсилювача 56 датчиків 22 величин зазорів штовхача І прямого хода чи штовхача 2 зворотного хода. На кресленнях також позначений робочий орган 70 напрямної. Причому, ви хід задаючого мультивібратора 35 через перемикач режимів роботи з'єднаний з входом першого диференціюючого ланцюжка 36, вихід якого з'єднаний з входом першого діодного обмежувача 37, вихід першого діодного обмежувача 37 з'єднаний з входом мультивібратора 38 переміщаючого штовхача , ви хід якого з'єднаний з входом першого підсилювача 39 потужності, вихід першого підсилювача 39 потужності через комутатор 40 електромагнітів з'єднаний з одним із електромагнітів 12 прикріплення штовхача і з одним із електромагнітів 24 фіксації нульового зазору, ви хід першого діодного обмежувача 37 з'єднаний також з входом мультивібратора 41 утримуючого штовхача, ви хід якого з'єднаний з входом другого диференціюючого ланцюжка 42, а його вихід з'єднаний з входом другого діодного обмежувача 43, вихід якого з'єднаний з входом тригера 44 перемикання утримуючого штовхача, а його вихід з'єднаний з входом другого підсилювача 48 потужності, вихід якого через комутатор 40 електромагнітів з'єднаний з одним із електромагнітів 12 прикріплення штовхача і з одним із електромагнітів 24 фіксації нульового зазору, вихід мультивібратора 38 переміщуючого штовхача з'єднаний також з входом третього диференціюючого ланцюжка 45, вихід якого з'єднаний з входом третього діодного обмежувача 46, вихід останнього з'єднаний з входом першої лінії затримки 47, вихід якої з'єднаний з входом тригера 44 перемикання утримуючого штовхача. ви хід третього диференціюючого ланцюжка 45 з'єднаний також з входом четвертого діодного обмежувача 46, вихід якого з'єднаний з входом другої лінії 50 затримки, а її вихід з'єдна 5 36957 ний з входом генератора 51 пилкоподібної напруги, вихід якого з'єднаний з входом схеми 52 "заморожування" пилки, вихід якої через комутатор 53 управляючих сигналів з'єднаний з входом одного з високовольтних підсилювачів 54, 55, виходу останніх з'єднані з п'єзоблембнтами 15, вихід третього диференціюючого ланцюжка 45 також з'єднаний з входом п'ятого діодного обмежувача 60, вихід якого з'єднаний з входом третьої лінії затримки 61, вихід якої з'єднаний з входом тригера 59 "заморожування" пилки і з входом схеми 52 "заморожування пилка", датчик 22 величини зазору через перемикач 69 з'єднаний з входом вимірювача 56 крона переміщення, вихід якого з‘єднаний з входом порогового пристрою 57, вихід якого з'єднаний з входом підсилювача 58 входом управління тригером, а його вихід з'єднаний з входом тригера 59 "заморожування" пилки, вихід тригера “заморожування" пилки з‘єднаний з входом схеми 52 "заморожування" пилки, джерело 67 перемикаючої напруги через кнопку 63 "Цикл" з'єднано з одиничним входом тригера 64 управління схемою "І" і з входом схеми "І", а ви хід тригера 64 управління схемою "І" з'єднаний з другим входом схеми "І", вихід якої з'єднаний з входом мультивібратора 66 завдання цикла, вихід мультивібратора 66 завдання цикла через перемкач 62 з'єднаний з входом першого диференціюючого ланцюжка 36, інформаційний вхід аналого-цифрового перетворювача 68 величини крока мікропереміщення з'єднаний з входом вимірювача 56 крока мікропереміщення, а його сигнальний вхід з'єднаний з виходом підсилювача 58 управління тригером. Робота п'єзоелектричного двигуна розглядається на прикладі переміщення рухомого елемента у прямому напрямку у безупинному режимі. Для цього встановлюється у вихідне для переміщення положення, наприклад у крайнє лізе положення. Перемикачем 52 мультивібратор 35 підключається до входу першого ди ференціюючого ланцюжка 36. Так як при прямому переміщенні рухомого елемента (зліва направо) штовхач 1 являється переміщуючим, а штовхач 2 - утримуючий, комутатором 40 електромагніт 12 прикріплення штовхача і електромагніт 24 фіксації нульового зазору штовхача І підключають до підсилювача 39 потужності, електромагніти 12 і 24 штовхача 2 підключають до підсилювача 48 потужності. За допомогою комутатора 53 до схеми 52 "заморожування" пилки підключають високовольтний підсилювач 54, навантажений на п'єзоелемент 16 штовхача 1. Включається поистрій 3 - управління переміщенням, для чого на нього подаються усі напруги, які живлять пристрій 3. Мультивібратор 35 в момент включення пристрою 3 починає генерувати прямокутні імпульси (Фіг. 7, И 35), які диференціюються диференціюючим ланцюжком 36 (Фіг. 7, И 36)і і через діодний обмежувач 37 (Фіг. 7, И 37) позитивні імпульси з вихода дифереціюючого ланцюжка 36 надходять на запуск мультивібратора 38. Прямокутні імпульси з вихода мультивібратора 36 (Фіг. 7, И 38) надходять на підсилювач 39 потужності, а з його вихода (Фіг. 7 И 39) через комутатор 40-на електромагніти 12 і 24 переміщаючого штовхача 1. Через проміжок часу, який дорівнює часу спрацювання електромагніт із 12 і 24, штовхач 1 буде прикріплений до основи напрямної 11. З ви ходу мультивібратора 38 сигнал також надходить на диференціюючий ланцюжок 45, виходу якого (Фіг. 7, И 45) позитивні імпульси, відповідаючі передньому фронту мультивібратора 38 через діодний обмежувач 49 і лінію затримки 50 (Фіг. 7, И 49, И 50) надходять на запуск генератора 51 пилкоподібної напруги. Пилкоподібна напруга через схему 52 "заморожування" пилки (фіг. 7, И 52), комутатор 53 надходить на зхід високовольтного підсилювача 54, з вихода якого лінійно наростаюча напруга (Фіг. 7, И 54) надходить на п‘єзоелемент 15. Рухомий елемент починає пересуватися. Сигнал датчика 22 величини зазору вимірювачем 56 перетворюється у напругу, яка пропорційна величині переміщення рухомого елемента, і надходить на вхід порогового пристрою 57 (Фіг. 7, И 57). У момент перевищення вихідним сигналом вимірювачем 56 встановленого порога на виході порогового пристрой 57 з‘являється сигнал який підсилюється підсилювачем 58 і з його вихода надходить на запуск аналого-цифрового перетворювача 68 (АЦП 68) і на тригер 59. По передньому фронту підсилювача 56 AЦП 66 перетворює вихідну напругу вимірювача об у цифровий двійковий код, а тригер 59 генерує прямокутний імпульс (Фіг. 7, И 59) який надходить на схему 52 "заморожування" пилки. Наростання пилкоподібної напруги, а отже і переміщення рухомого елемента припиняється /Фіг. 7, И 52). Позитивні імпульси з вихода діодного обмежувача 37 надходять також на запуск мультивібратора 41. Імпульс мультивібратора 41 (фіг. 7, И 41) диференціюється диференціюючим ланцюжком 42 (Фіг. 7, И 42), продиференційовані імпульси надходять на діодний обмежувач 43. Негативні імпульси з вихода діодного обмежувача 43 (Фіг. 7, И 43), які відповідають задньому фронту імпульса мультивібратора 41, надходять на запуск тригера 44. Прямокутний імпульс з виходу тригера 44 (Фіг. 7, И44) надходять на пісилювач 48, а з його виходу (Фіг. 7, И 48) через комутатор 40 надходить на електромагніти 12 і 24 утримуючого штовхача 2, В результаті до моменту часу зняття сигналу з електромагнітів 12 і 24 штовхача 1 і наступного відкріплення 1 від основини напрямної 11 (Фіг. 7, спрацювання електромагнітів 12 і 24 інакше до моменту часу закінчення імпульса мультивібратора 38) Фіг. 7, И 38 штовхач 2 (р ухомий елемент) буде прикріплений до основи напрямної 11. З виходу диференціюючого ланцюжка 45 (Фіг. 7, И 45) продиференційовані імпульси мультивібратора 38 надходять також на діодний обмежувач 60, а з виходу якого негативний імпульс, відповідаючий задньому фронту імпульсу мультивібратора 38 (Фіг. 7, И 38) через лінію затримки 61 (Фіг. 7, И 61), яка забезпечує зрив генерації пилкоподібної напруги після відключення штовхача 1, надходить у якості імпульса зриву на генератор 51 пилкоподібної напруги, а також на тригер 59 і перекидає його. Напруга на виході тригера 51 падає до нуля. З результаті зриву пилки і перекидання тригера 59 знімається сигнал з схеми 52 "заморожування" пилки. Напруга на виході високовольтного підсилювача 54 зменшується до нуля, п‘єзоелемент 6 36957 15 скорочується і підтягує штовхач 1 до рухомого елемента. У наступному періоді імпульсів мультивібратора 35 робота пристрою З повторюється: штовхач 1 прикріпляється до основи напрямної 11, а штовхач 2 відкрівляється, так як позитивні імпульси з діодного обмежувача 46, які відповідають передньому фронту наступного імпульсу мультивібратора 38 перекидають тригер 44. З результаті знімається сигнал з підсилювача 48 (Фіг. 7. И 44, И 48) електромагніти 12 і 24 штовхача 2 обезточуються. Запускається генератор 51 пилкоподібної напруги, пилкоподібна напруга підсилюється і надходить на п‘езоелемент 15. В результаті рухомий елемент переміщується на встановлену величину крока мікропереміщєння. При зворотному переміщенні рухомого елемента штовхач 1 - стає утримуючим, а штовхач 2 переміщуючим. Тому за допомогою комутатора 40 електромагнітні 12 і 24 штовхача 2 підключають до підсилювача 39 потужності, а електромагніти 12 і 24 штовхача 1 - до підсилювача 48 потужності. Крім того, до схеми 52 "заморожування" пилки за допомогою комутатора 53 підключають високо вольтний підсилювач 55 п'єзоелемента 16, встановленого на штовхачі 2. Для переведення п‘єзоелектричного двигуна в режим роботи "Цикл" перемикачем 62 від пристрою 3 управління переміщенням відключають мультивібратор 35 і підключають схему управління кроковим переміщенням рухомого елемента 70. При натисненні кнопки 63 мультивібратор 66 виробляє окремий позитивний прямокутний імпульс. В результаті відбувається запуск мультивібраторів 38 і 41. Далі пристрій 3 управління переміщенням працює так як і в режимі безперервного переміщення. Рухомий елемент зміщується на один крок (напрямок крока переміщення визначають комутатори 40 і 53) і утримується штовхачем, виконуючим роль утримуючого (штовхачем 2 при прямому переміщенні, штовхачем 1 - при зворотному переміщення). Величину крока мікропереміщення встановлюють шляхом злічення двійкового кода величини крока мікропереміщення з регістра АЦП 68. Змінюючі величину порога порогового пристрою 57 встановлюють потрібну величину кроку мікропереміщення. Фіг. 1 7 36957 Фіг. 2 8 36957 Фіг. 3 9 36957 Фіг. 4 Фіг. 5 10 36957 Фіг. 6 11 36957 Фіг. 7 12 36957 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 13
ДивитисяДодаткова інформація
Назва патенту англійськоюPiezoelectric engine
Автори англійськоюShepeliev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюПьезоэлектрический двигатель
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич
МПК / Мітки
МПК: H02N 2/00
Мітки: двигун, п'єзоелектричний
Код посилання
<a href="https://ua.patents.su/13-36957-pehzoelektrichnijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">П’єзоелектричний двигун</a>
Пристрій для визначення максимального числа з групи чисел
Номер патенту: 29630
Опубліковано: 15.11.2000
Автори: Рашкевич Юрій Михайлович, Зербіно Дмитро Дмитрович, Цмоць Іван Григорович
МПК: G06F 7/04
Мітки: максимального, чисел, групи, числа, пристрій, визначення
Текст:
...порівняння, вхід управління блоку порівняння 7ji з'єднаний з виходом блоку порівняння 7j(і-1). Пристрій працює наступним чином. Числа, що порівнюються, поступають на інформаційні входи пристрою 21, ..., 2 m. З ви ходу 2j j-e число поступає на інформаційні входи тригерів 8 блоків порівняння 7j1, ..., 7jn, причому старший розряд числа поступає на вхід тригера 8 блоку 7j1, а молодший - на вхід тригера 8 блоку 7jn. По передньому фронту (перепаду...
Поршневий двигун лавіста
Номер патенту: 34003
Опубліковано: 15.02.2001
Автори: Стефанський Станіслав Петрович, Концур Віктор Володимирович, Ялова Лариса Кирилівна
МПК: F02B 41/00
Мітки: лавіста, двигун, поршневий
Текст:
...колінчастий вал 2 з маховиком 3. Колінчастий вал через шатуни 4 з'єднаний з поршнями 5, які розташовані в циліндрах 6, що містяться в блок-картері 1. Камери 9 тиску сформовані в нижніх частинах циліндрів 6, які наділені профільованими днищами 7 і прорізами 8 на їх бокових поверхнях для сполучення порожнин камер 9 тиску з порожниною блок-картера 1. Двигун ЛАВІСТА також містить систему 10 впливу на робоче середовище, в яку входять...
Пристрій для визначення резонансної частоти елементів конструкції
Номер патенту: 32930
Опубліковано: 15.02.2001
Автори: Хворост Володимир Андрійович, Пузько Ігор Данилович
МПК: G01M 7/00
Мітки: резонансної, конструкції, частоти, елементів, пристрій, визначення
Текст:
...перетворювач ,блок порівняння,другий задавальний генератор гармонійних сигналів с дискретною зміною частоти,вихід якого спо лучений з входом регулятора амплітуди через третій комутатор,перший вхід якого з'єданий з виходом першого задавального генератора гармонійних сигналів ,вихід фазового детектора з'єднаний з інфор маїтійним входом четвертого комутатора ,другий вхід якого з'єднаний через другий нуль-орган з лічильним входом...
Двигун
Номер патенту: 35232
Опубліковано: 15.03.2001
Автор: Синиця Володимир Степанович
МПК: F03G 7/00
Мітки: двигун
Формула / Реферат:
1. Двигун має колесо, жорстко закріплене на валу та вантажі, котрі примушують колесо обертатися безперервно, який відрізняється тим, що двигун має два колеса з радіальними пазами, між котрими розташовані вантажі, та має два колеса із штовхачами і кожні два колеса жорстко закріплені на своїх валах, які на підшипниках установлені на станині, а вали між собою з'єднані зубчастими колесами, а кожний вантаж має свою вісь, котра вставляється в...
Буферний запам’ятовуючий пристрій
Номер патенту: 23357
Опубліковано: 31.08.1998
Автори: Рашкевич Юрій Михайлович, Цмоць Іван Григорович, Демида Богдан Адамович
МПК: G11C 11/407, G06F 7/08
Мітки: пристрій, буферний, запам'ятовуючий
Формула / Реферат:
Буферний запам'ятовуючий пристрій, який містить блок пам'яті з n комірок, вхід управління, вхід синхронізації, адресний вхід, iнформаційний вхід, інформаційний вихід, блок сортування адреси з n вузлів порівняння, кожний з яких містить регістр, елемент порівняння, елемент АБО, тригер, перший елемент І, при цьому інформаційний вхід першої комірки пам'яті є інформаційним входом пристрою, вхід синхронізації блока сортування адреси є одноіменним...
Попередній патент: Фрезер буровий
Наступний патент: Пристрій суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельної опори
Випадковий патент: Спосіб екстемпорального виготовлення перев'язувального засобу для профілактики гнійно-септичних ускладнень післяопераційної рани