Пристрій суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельної опори
Номер патенту: 36959
Опубліковано: 16.04.2001
Автори: Шепелєв Анатолій Олександрович, Зіненко Володимир Миколайович

Текст
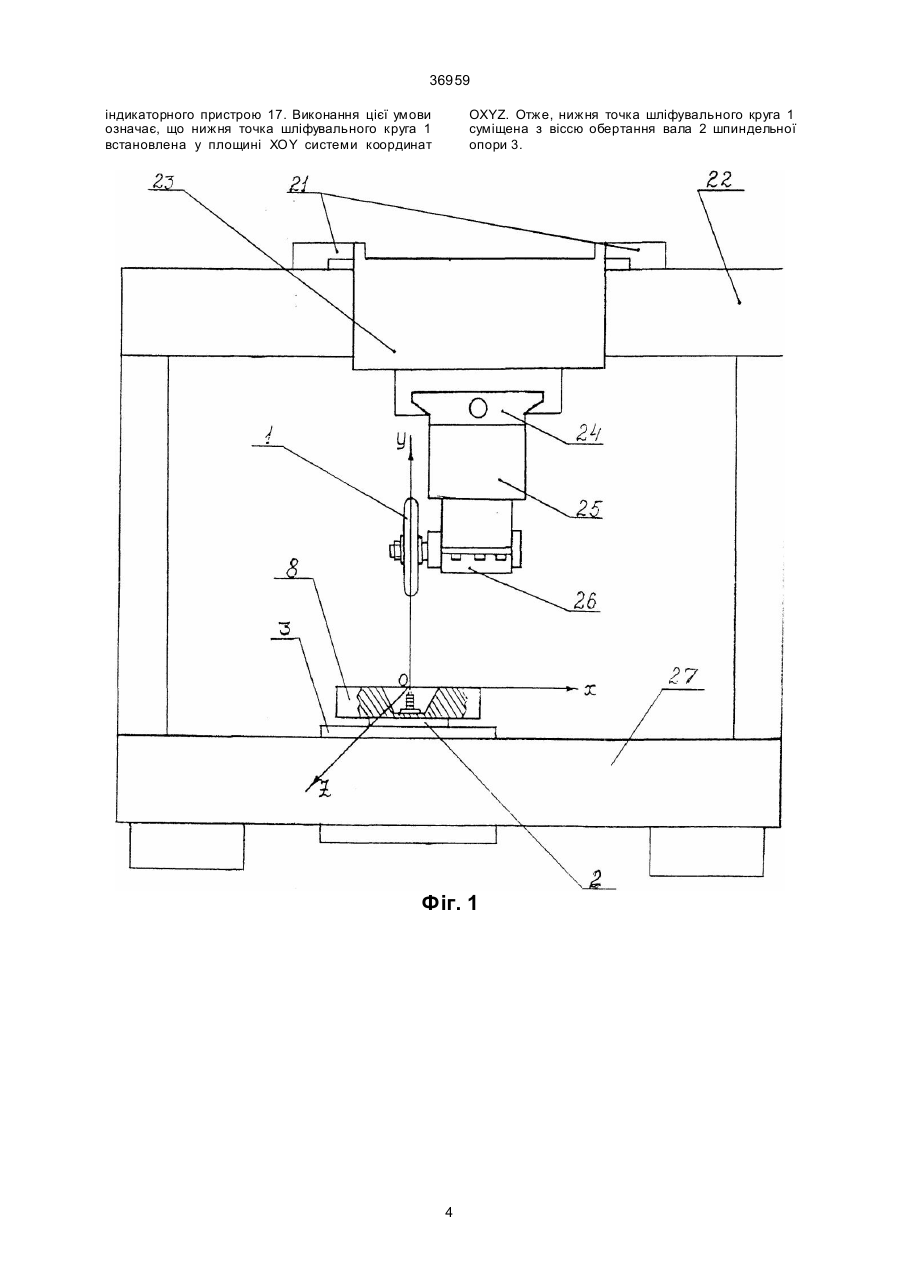
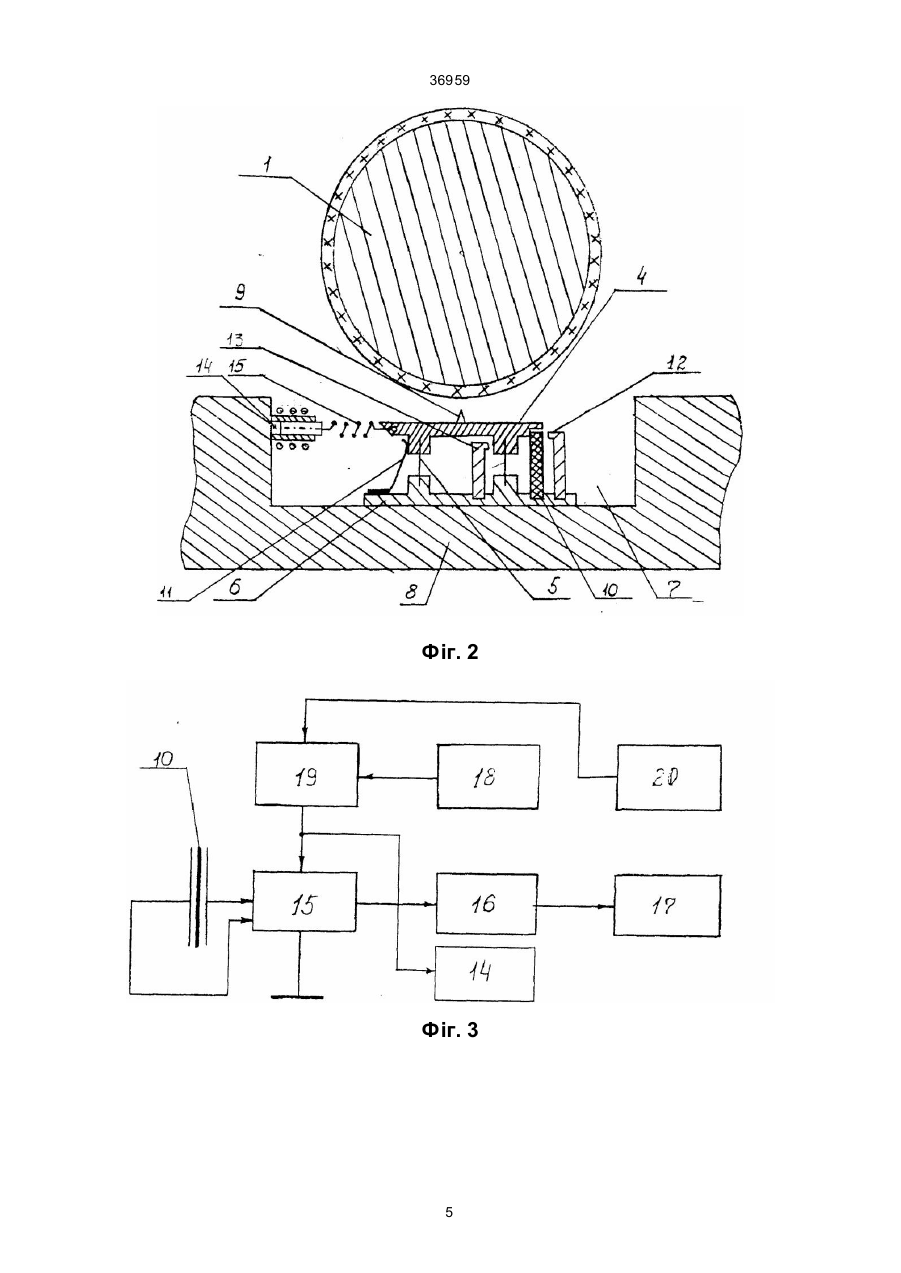
Пристрій суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельної опори, який містить пристрій переміщення шліфувального круга, рухому пластин у, встановлену на одних кінцях двох гн учких пластин, другі кінці яких закріплено на платформі, що встановлена в порожнині планшайби, індикаторну голку, закріплену на рухомій пластині, яка пружно підтиснута до одного кінця п'єзоелемента, а другий його кінець встановлено нерухомо, реле, підсилювач, індикаторний 36959 ється виключення впливу нестабільності поверхневого заряду на точність суміщення, а також забезпечується повне стікання нейтралізуючих зарядів на Землю і, як наслідок, підвищується точність суміщення і надійність пристрою в цілому. Для вирішення цієї задачі пристрій суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельної опори, який містить пристрій переміщення шліфувального круга, р ухому пластину, встановлену на одних кінцях двох гнучких пластин, другі кінці яких укріплено на платформі, що встановлена в порожнині планшайби, індикаторну голку, закріплену на рухомій пластині, яка пружно підтиснута до одного кінця п'єзоелемента, а другий його кінець установлено нерухомо, реле, підсилювач, індикаторний пристрій, електронний ключ, джерело постійної напруги, мультивібратор, згідно з винаходом, оснащено обмежувачем вигину п'єзоелемента, встановленим на платформі із зазором в напрямку вигину п'єзоелемента, і обмежувачем зворотного переміщення рухомої пластини, встановленим на платформі перед рухомою пластиною із зазором відносно неї в напрямку її зворотного переміщення, а також з'єднаним з рухомою пластиною електромагнітом для забезпечення її переміщення в напрямку, протилежному пружному підтисканню, крім того, п'єзоелемент через реле з'єднаний з входом підсилювача, вихід підсилювача з'єднаний з входом індикаторного пристрою, джерело постійної напруги з'єднано з першим входом електронного ключа, вихід мультивібратора з'єднаний з другим входом електронного ключа, вихід електронного ключа з'єднаний з реле і з електромагнітом. Причинно-наслідковий зв'язок сукупності суттєви х ознак даного пристрою з технічним результатом, що досягається, полягає в наступному. Встановимо на платформі в напрямку вигину п'єзоелемента обмежувач вигину п'єзоелемента із зазором відносно п'єзоелемента. Величину цього зазору вибирають такою, щоб при даній жорсткості гнучких пластин у всьому діапазоні можливих швидкостей обертання шліфувального круга і зафіксованій величині зазору між шліфувальним кругом і рухомою пластиною п'єзоелемент прилягав до обмежувача вигину. Причому, платформа у порожнині планшайби встановлена так, що у разі прилягання п'єзоелемента до обмежувача вигину вершина індикаторної голки лежить на осі обертання вала шпиндельної опори. Для суміщення нижньої точки шліфувального круга з віссю обертання вала попередньо встановлюють зафіксовану величину зазору між шліфувальним кругом і рухомою пластиною. Не змінюючи висоти шліфувального круга, зміщують нижню точку шлі фувального круга у площині OXZ по осях X, Z системи координат OXYZі знаходять його положення, при якому різниця потенціалів між гранями п'єзоелемента максимальна. Отже, знаходять різницю потенціалів між гранями п'єзоелемента, яка для даної температури і вологості довкілля з урахуванням старіння п'єзоелемента відповідає розташуванню вершини голки на осі обертання вала опори. Далі методом послідовних наближень знаходять положення шліфувального круга, при якому різниця потенціалів на його гранях дорівнює V, а мікрозміщення шліфувального круга по осях X, Z приводить до її зменшення, і суміщують нижню точку шліфувального круга з віссю обертання вала шпиндельної опори. Таким чином, виключається вплив нестабільності п'єзоелемента на точність суміщення. Крім того, одночасно з підключенням граней п'єзоелемента до Землі спрацьовує реле 14 і пружиною 15 відводить рухому пластину 4 від п'єзоелемента 10 до її упору в обмежувач 13 зворотного переміщення рухомої пластини. П'єзоелемент випрямляється і потенціали його граней стають рівними нулю. Нейтралізуючі заряди стікають на Землю і не впливають на точність роботи пристрою. Винахід пояснюється кресленнями: фіг. 1 – двокоординатний шліфувальний верстат; фіг. 2 – поперечний переріз пристрою суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельної опори (механічна частина); фіг. 3 – пристрій напівавтоматичного суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельної опори (електрична функціональна схема). Пристрій суміщення нижньої точки шліфувального круга 1 з дугоподібною шліфуючою поверхнею з віссю обертання вала 2 шпиндельної опори 3 включає (фіг. 2) рухому пластину 4, встановлену на одних кінцях двох гнучких пластин 5, другі кінці яких укріплені у платформі 6, яка встановлена у порожнині 7 планшайби 8. На рухомій пластині 4 встановлена індикаторна голка 9, яка призначена для виявлення під дугоподібною шліфуючою поверхнею шліфувального круга 1 обмеженого об'єму газу, в якому щільність і швидкість газу більші, ніж під іншими точками шліфуючої поверхні шліфувального круга 1. Отже, рухома пластина 4 призначена для: установки на ній індикаторної голки 9; утворення з поверхнею шліфувального круга 1 клиноподібного зазору для ущільнення газу (повітря) під точками шліфуючої поверхні, розташованими над рухомою пластиною 4, причому під нижньою точкою шліфувального круга щільність газу, а, отже, і його в'язкість максимальні. На платформі 6 у напрямку переміщення рухомої пластини 4 під дією сили тертя потоку газу об індикаторну голку 9 установлений п'єзоелемент 10, призначений для вимірювання сили тертя потоку газу об індикаторну голку 9. Початковий контакт рухомої пластини 4 з п'єзоелементом 10 забезпечується плоскою пружиною 11. На платформі 6 за п'єзоелементом 10 у напрямку його вигину встановлений обмежувач 12 вигину п'єзоелемента. Обмежувач 12 вигину п'єзоелемента 10 призначений для фіксування величини вигину п'єзоелемента 10 під дією рухомої пластини 4 в положенні, при якому вершина індикаторної голки 9 лежить на осі обертання вала 2 шпиндельної опори 3. На платформі 6 установлений також обмежувач 13 зворотного переміщення рухомої пластини 4. Обмежувач 13 зворотного переміщення призначений для обмеження величини переміщення ру 2 36959 хомої пластини 4 електромагнітом 14, зв'язаним з нею пружиною 15. Це обмежує величину деформації плоскої пружини 11, а отже, обмежує величину її залишкової деформації. Зміщення рухомої пластини 4 електромагнітом 14 необхідно для її відведення від п'єзоелемента 10. У результаті випрямлення п'єзоелемента 10 потенціали його граней стають рівними нулю. Якщо при нульовому поверхневому заряді грані п'єзоелемента 10 підключити до Землі, нейтралізуючі заряди, які потрапляють на грані з навколишнього середовища і через опір ізоляції, стікають на Землю. Це запобігає порушенню дієздатності пристрою і зниженню його точності. Різниця потенціалів граней п'єзоелемента 10 через контакти реле 15 надходить на вхід підсилювача 16 на польовому транзисторі з малою напругою зміщення нуля, малим рівнем шумів і великим вхідним опором. Прикладом такого підсилювача є мікросхема 140 УД 24 (див.: Цифровые и аналоговые интегральные микросхемы: Справ. – М.: Радио и связь, 1989). Реле 15 служить також для періодичного підключення граней п'єзоелемента 10 до Землі для стікання з них нейтралізуючих зарядів. З виходу підсилювача 16 напруга надходить на індикаторний пристрій 17, за який може правити вольтметр. Живлення реле 15 здійснюється від джерела 18 постійної напруги через електронний ключ 19. Управління електронним ключем 19 здійснюється мультивібратором 20. Частота і час підключення граней п'єзоелемента 10 до Землі визначаються частотою проходження імпульсів мультивібратора 20. Крім того, на кресленнях позначені: 21 - п'єзоелектричний двигун; 22 – основа аеростатичної напрямної; 23 – рухомий елемент аеростатичної напрямної; 24 – пристрій поперечного зміщення шліфувального круга; 25 – пристрій вертикального переміщення шліфувального круга; 26 – електрошпиндель; 27 – станина верстата. Причому п'єзоелемент 10 через контакти реле 15 з'єднаний з входом підсилювача 16, вихід підсилювача 16 з'єднаний з входом індикаторного пристрою 17, джерело 18 постійної напруги з'єднано з першим входом електронного ключа 19, вихід мультивібратора 20 з'єднаний з другим входом електронного ключа 19, вихід електронного ключа 19 з'єднаний з реле 15 і з електромагнітом 14. Працює пристрій напівавтоматичного суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельної опори наступним чином. Попередньо платформу 6 у порожнині 7 планшайби 8 установлюють так, щоб при вигині п'єзоелемента 10 до упирання в обмежувач 12 величини вигину під тиском рухомої пластини 4 вершина індикаторної голки 9 лежала на осі обертання вала 2. Для суміщення нижньої точки шліфувального круга 1 з віссю обертання вала 2 зміщують рухомий елемент 23 (фіг. 1) аеростатичної напрямної і встановлюють шліфувальний круг 1 з мінімальним зазором відносно рухомої пластини 4. Шліфувальному кругу 1 задають обертання з номінальною швидкістю. Включають пристрій суміщення. Позитивні імпульси з виходу мультивібратора 20 періодично відкривають електронний ключ 19. Напруга джерела 18 постійної напруги через відкритий електронний ключ 19 надходить на обмотку реле 15 і електромагніт 14. Реле 15 спрацьовує і своїми замикаючими контактами підключає грані п'єзоелемента 10 до Землі для стока зарядів, що нейтралізують заряди граней п'єзоелемента 10. Одночасно електромагніт 14 відводить рухому пластину 4 від п'єзоелемента 10 до обмежувача 13 зворотного переміщення. Поверхневий заряд граней п'єзоелемента 10 стає рівним нулю. Нейтралізуючі заряди через контакти реле 15 стікають на Землю. При знеструмленому реле 15 різниця потенціалів граней п'єзоелемента 10 через розмикаючі контакти реле 15 надходить на вхід підсилювача 16, а з його виходу надходить на вхід індикаторного пристрою 17. Переміщують шлі фувальний круг 1 по осях X і системи координат OXYZ. У міру наближення нижньої точки шліфувального круга 1 до вершини індикаторної голки 9 сила тертя між газом і індикаторною голкою 9 підвищується. Отже, підвищується сила тиску рухомої пластини 4 на п'єзоелемент 10. Вигин п'єзоелемента 10 збільшується і збільшується різниця потенціалів між його гранями. Зміну різниці потенціалів між гранями п'єзоелемента 10 спостерігають за показами індикаторного пристрою 17. Максимальні покази індикаторного пристрою 17 Vmax, які при мінімальному зазорі між рухомою пластиною 4 і вибраній жорсткості гнучких пластин 5 завжди відповідають вигину п'єзоелемента 10 до обмежувача 12 вигину, запам'ятовують. Збільшують величину зазору між шліфувальним кругом 1 і рухомою пластиною 4 до величини, при якій покази індикаторного пристрою 17 залишаються рівними Vmax. Для перевірки суміщення нижньої точки шліфувального круга 1 з віссю обертання вала 2 шліфувальний круг 1 зміщують по осі Х в малій окрузі ± D х. У тому випадку, коли при зміщенні шліфувального круга 1 у напрямку півосі –Х чи –Х покази не стають меншими за Vmax, збільшують зазор між шліфувальним кругом 1 і рухомою пластиною 4. Методом послідовних наближень, збільшуючи висоту шлі фувального круга 1, шліфувальний круг 1 установлюють по осі Х у положення, при якому його мікрозміщення у напрямку півосей ±Х викликає зменшення показів індикаторного пристрою 17. Виконання цієї умови означає, що нижня точка шліфувального круга 1 лежить у площині YOZ системи координат OXYZ (фіг. 1). Далі зміщують шліфувальний круг 1 у напрямку півосей ±Z. Якщо, як і у попередньому випадку, покази індикаторного пристрою 17 в одному з напрямків мікрозміщення не змінюються, також збільшують зазор між шліфувальним кругом 1 і рухомою пластиною 4. Методом послідовних наближень, збільшуючи висоту шліфувального круга 1 і зміщуючи його по осі Z, установлюють шліфувальний круг 1 у положення, при якому його мікрозміщення у напрямку півосей ±Z викликає зменшення показів 3 36959 індикаторного пристрою 17. Виконання цієї умови означає, що нижня точка шліфувального круга 1 встановлена у площині XOY системи координат OXYZ. Отже, нижня точка шліфувального круга 1 суміщена з віссю обертання вала 2 шпиндельної опори 3. Фіг. 1 4 36959 Фіг. 2 Фіг. 3 5 36959 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for alignment of lower point of grinding wheel with arched grinding surface with rotation axis of spindle bearing shaft
Автори англійськоюShepeliev Anatolii Oleksandrovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюУстройство совмещения нижней точки шлифовального круга с дугообразной шлифовальной поверхностью с осью вращения вала шпиндельной опоры
Автори російськоюШепелев Анатолий Александрович, Зиненко Владимир Николаевич
МПК / Мітки
МПК: B23Q 17/00
Мітки: шліфувального, суміщення, точки, пристрій, круга, опори, нижньої, обертання, дугоподібною, вала, шпиндельної, шліфувальною, віссю, поверхнею
Код посилання
<a href="https://ua.patents.su/6-36959-pristrijj-sumishhennya-nizhno-tochki-shlifuvalnogo-kruga-z-dugopodibnoyu-shlifuvalnoyu-poverkhneyu-z-vissyu-obertannya-vala-shpindelno-opori.html" target="_blank" rel="follow" title="База патентів України">Пристрій суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельної опори</a>
Пристрій суміщення нижньої точки шліфувального круга з дугоподібною шліфувальною поверхнею з віссю обертання вала шпиндельного вузла
Номер патенту: 20907
Опубліковано: 07.10.1997
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: B23Q 17/00
Мітки: шліфувального, дугоподібною, точки, шліфувальною, поверхнею, віссю, вала, обертання, шпиндельного, суміщення, вузла, круга, пристрій, нижньої
Формула / Реферат:
1. Устройство совмещения нижней точки шлифовального круга с дугообразной шлифующей поверхностью с осью вращения вала шпиндельного узла, содержащее устройство перемещения шлифовального круга и индикаторное устройство, отличающееся тем, что оно снабжено связанной с пьезоэлементом подвижной пластиной с закрепленной в центре ее верхней плоскости индикаторной иглой, кроме того устройство включает также блок коммутации и усилитель, причем...
Пристрій суміщення вершини алмазного різця з віссю обертання вала аеростатичної шпиндельної опори
Номер патенту: 36956
Опубліковано: 16.04.2001
Автори: Зіненко Володимир Миколайович, Шепелєв Анатолій Олександрович
МПК: B23B 25/00
Мітки: вершини, віссю, пристрій, обертання, суміщення, аеростатичної, опори, алмазного, шпиндельної, різця, вала
Текст:
...такій величині зміщення зміною відстані між плоским провідником 9 і вершиною 13 голки можно нехтувати. Тому вершина 13 і плоский провідник 9 у еквівалентній схемі вважаються нерухомими. Тоді рухомим елементом у еквівалентній схемі вважається алмазний різець (кристал алмаза). Причому, точки задньої грані 15 різця в силу близкості до вершини 13 лежать в області сильного електричної о поля. Отже навіть незначна зміна відстані між точкою на...
Пристрій компенсації гіроскопічного моменту обертового елемента, наприклад, вала аеростатичної шпиндельної опори
Номер патенту: 25540
Опубліковано: 30.10.1998
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: опори, пристрій, моменту, обертового, вала, елемента, гіроскопічного, аеростатичної, наприклад, компенсації, шпиндельної
Формула / Реферат:
1. Устройство компенсации гироскопического момента вращающегося элемента, например, вала аэростатической шпиндельной опоры, содержащее датчики величины смещения оси вращающегося элемента по оси "X" и по оси "Y", измерители величины смещения оси вращения вращающегося элемента по оси "X" и по оси "Y", объединенные в группы по меньшей мере из двух, регуляторы давления, образующие компенсаторы смещения оси...
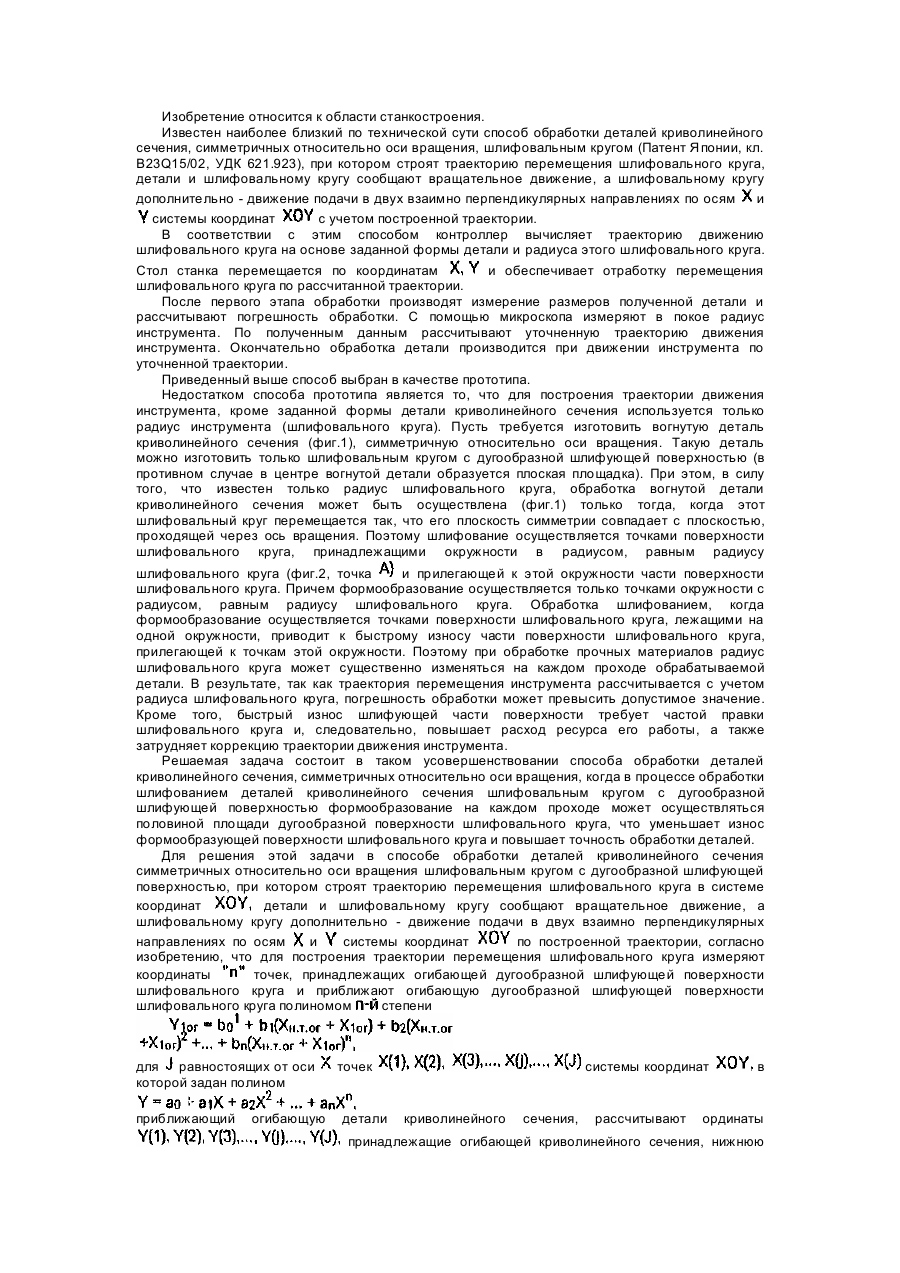
Спосіб обробки деталей криволінійного перерізу, симетричних відносно вісі обертання, шліфувальним кругом з дугоподібною шліфуючою поверхнею
Номер патенту: 20749
Опубліковано: 07.10.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: B23Q 15/007, B24B 19/00
Мітки: деталей, криволінійного, перерізу, спосіб, дугоподібною, поверхнею, обробки, вісі, шліфуючою, симетричних, відносної, шліфувальним, кругом, обертання
Формула / Реферат:
1. Способ обработки деталей криволинейного сечения симметричных относительно оси вращения шлифовальным кругом с дугообразной шлифу-ющей поверхностью, при котором строят траекторию перемещения шлифовального круга в системе координат XOY, детали и шлифовальному кругу сообщают вращательное движение, а шлифовальному кругу дополнительно - движение подачи в двух взаимно перпендикулярных направлениях по осям Х и Y системы координат XOY по...
Механізм тонкої подачі шліфувального круга
Номер патенту: 4014
Опубліковано: 27.12.1994
Автори: Шилле Андрій Ігоревич, Довгоборець Вадим Петрович, Соболєв Сергій Михайлович
МПК: B24B 47/00
Мітки: круга, механізм, шліфувального, тонкої, подачі
Формула / Реферат:
Механизм тонкой подачи шлифовального круга, содержащий корпус шлифовальной бабки, несущий опоры шпинделя шлифовального круга, одна из которых связана с корпусом шлифовальной бабки с помощью упругого элемента, силовой упругий элемент, один конец которого жестко связан с корпусом шлифовальной бабки, а другой - с корпусом упомянутой опоры шпинделя, и привод силового упругого элемента в виде червячного редуктора, отличающийся тем, что, с целью...
Попередній патент: П’єзоелектричний двигун
Наступний патент: Гвинтова кришка для посуду морозова
Випадковий патент: Швидкорознімне з'єднання трубопроводів