Спосіб керування трифазним активним випрямлячем струму
Номер патенту: 45720
Опубліковано: 25.11.2009
Автори: Волков Олександр Васильович, Косенко Ігор Олександрович


Формула / Реферат
1. Спосіб керування трифазним активним випрямлячем струму, який полягає в тому, що задають необхідне значення вихідного струму активного випрямляча, обчислюють необхідне значення активної проекції і задають необхідне значення реактивної проекції узагальненого вектора мережного струму відповідно на осі абсцис і ординат обертової ортогональної координатної системи, орієнтованої віссю абсцис за узагальненим вектором мережної напруги, контролюють фазні мережні напруги і струми, через які розраховують відповідні поточні узагальнені вектори мережних напруги і струму в їх проекціях на осі абсцис і ординат нерухомої ортогональної координатної системи, орієнтованої віссю абсцис за геометричною віссю обмотки фази "а" силового трансформатора, від якої здійснюють відлік аргументів всіх узагальнених векторів, контролюють вихідний струм активного випрямляча, через який для всіх можливих комбінацій відкритих силових ключів активного випрямляча розраховують прогнозовані значення узагальненого вектора вхідного струму активного випрямляча в його проекціях на осі нерухомої ортогональної координатної системи, контролюють поточні значення косинуса і синуса від аргументу узагальненого вектора мережної напруги, за допомогою яких зі зворотних координатних перетворень необхідних значень активної і реактивної проекцій мережного струму визначають задане значення узагальненого вектора мережного струму в його проекціях на осі абсцис і ординат нерухомої ортогональної координатної системи, обчислюють відхилення між необхідним і контрольованим значеннями вихідного струму активного випрямляча, а необхідне значення активної проекції узагальненого вектора мережного струму обчислюють у вигляді суми першої складової, прямо пропорційної цьому відхиленню, і другої складової, прямо пропорційної інтегралу від даного відхилення, який відрізняється тим, що обчислюють відхилення між проекціями заданого і поточного узагальнених векторів мережного струму на відповідні осі абсцис і ординат нерухомої ортогональної координатної системи, розраховують у вигляді кореня квадратного із суми квадратів цих відхилень модуль узагальненого вектора відхилення мережного струму, обчислюють значення косинуса і синуса від аргументу узагальненого вектора відхилення мережного струму у вигляді відповідно відношень проекцій цього вектора на осі абсцис і ординат нерухомої ортогональної координатної системи до модуля цього вектора, для всіх можливих комбінацій відкритих силових ключів активного випрямляча розраховують значення косинуса і синуса від аргументу прогнозованих узагальнених векторів вхідного струму активного випрямляча у вигляді відношень прогнозованих значень проекцій цих векторів відповідно на осі абсцис і ординат нерухомої ортогональної координатної системи до кореня квадратного із суми квадратів цих проекцій, обчислюють для всіх можливих комбінацій силових ключів активного випрямляча прогнозуючий функціонал у вигляді двох доданків, перший з яких дорівнює добутку косинусів від аргументів узагальненого вектора відхилення мережного струму та прогнозованого узагальненого вектора вхідного струму активного випрямляча, а інший доданок дорівнює добутку синусів від аргументів цих векторів, визначають найбільше значення зазначеного функціонала, причому нову комбінацію силових ключів активного випрямляча задають відповідною згаданому найбільшому значенню прогнозуючого функціонала.
2. Спосіб за п. 1, який відрізняється тим, що додатково контролюють електрорушійну силу (ЕРС) навантаження, підключеного на стороні постійного струму активного випрямляча, а необхідне значення активної проекції узагальненого вектора мережного струму обчислюють у вигляді суми трьох складових, причому третя складова прямо пропорційна добутку контрольованих ЕРС і струму навантаження.
3. Спосіб за п. 1, який відрізняється тим, що додатково порівнюють розраховане значення модуля узагальненого вектора відхилення мережного струму з припустимою уставкою, при цьому, якщо значення модуля узагальненого вектора відхилення мережного струму не перевищує зазначеної уставки, то примусово зберігають незмінною і відповідною попередньому моменту часу комбінацію відкритих силових ключів активного випрямляча.
4. Спосіб за п. 1, який відрізняється тим, що додатково розраховують абсолютне значення від обчисленого відхилення між необхідним і контрольованим значеннями вихідного струму активного випрямляча та порівнюють його з припустимої уставкою, при цьому, якщо розраховане абсолютне значення цього відхилення не перевищує зазначеної уставки, то примусово зберігають незмінною і відповідною попередньому моменту часу комбінацію відкритих силових ключів активного випрямляча.
Текст
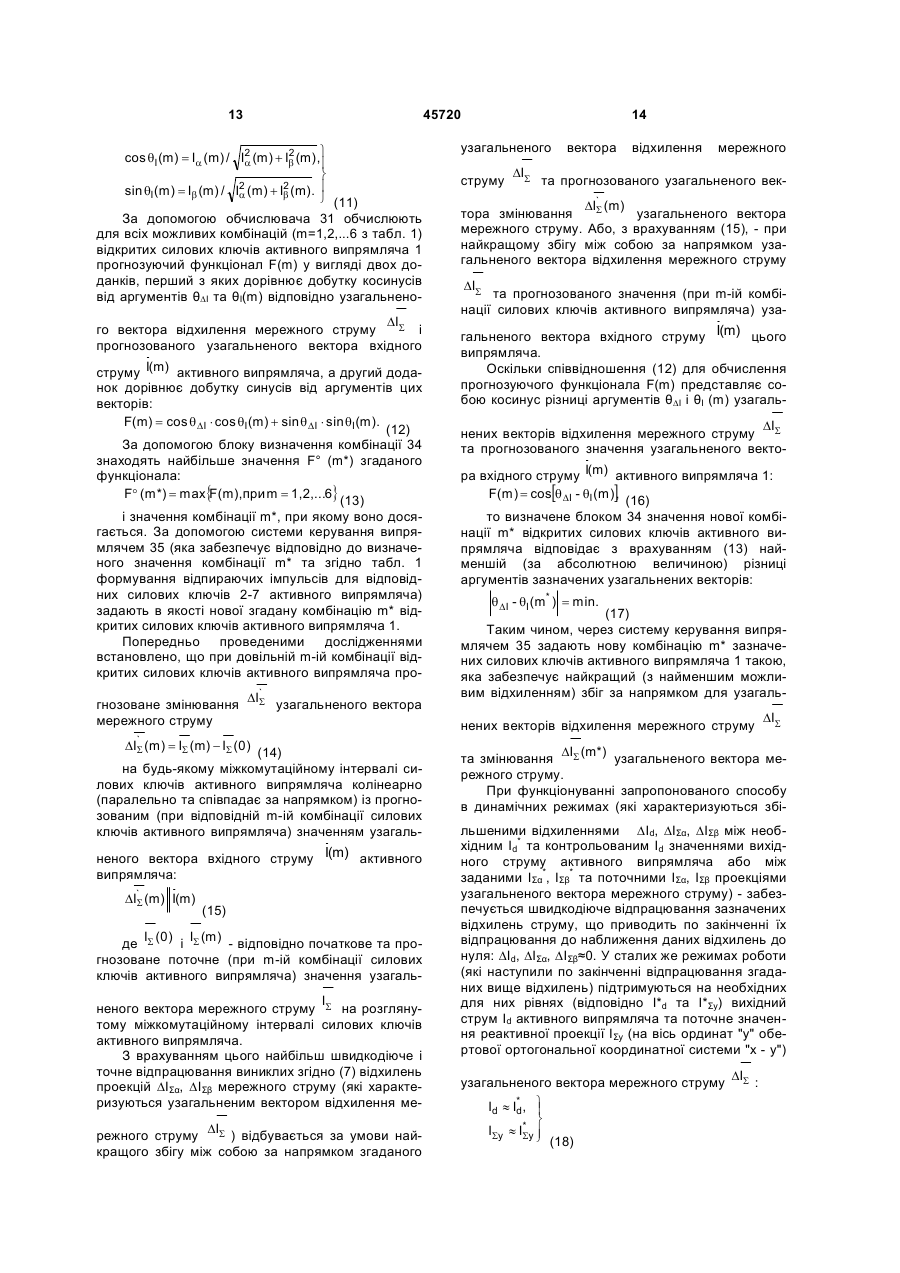
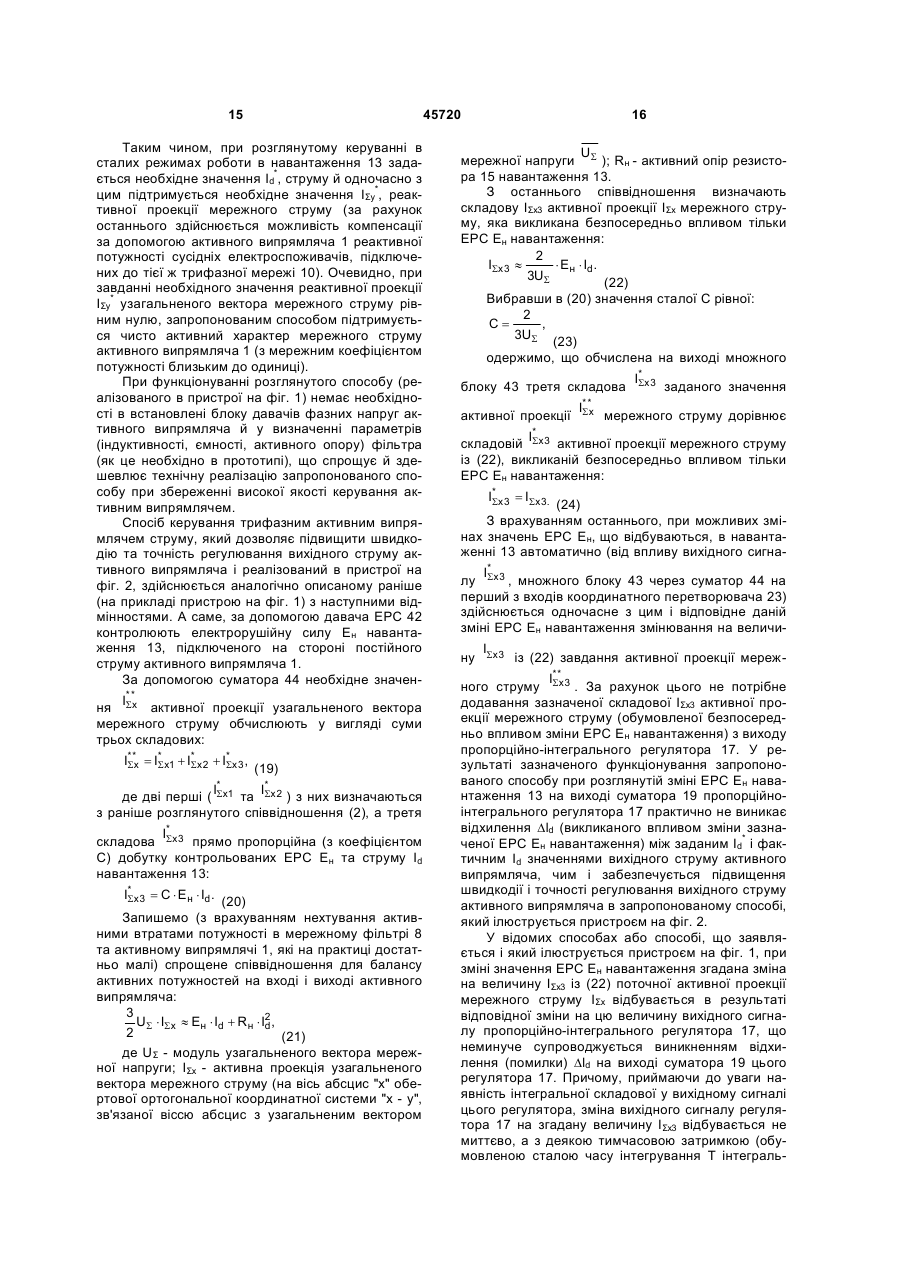
1. Спосіб керування трифазним активним випрямлячем струму, який полягає в тому, що задають необхідне значення вихідного струму активного випрямляча, обчислюють необхідне значення активної проекції і задають необхідне значення реактивної проекції узагальненого вектора мережного струму відповідно на осі абсцис і ординат обертової ортогональної координатної системи, орієнтованої віссю абсцис за узагальненим вектором мережної напруги, контролюють фазні мережні напруги і струми, через які розраховують відповідні поточні узагальнені вектори мережних напруги і струму в їх проекціях на осі абсцис і ординат нерухомої ортогональної координатної системи, орієнтованої віссю абсцис за геометричною віссю обмотки фази "а" силового трансформатора, від якої здійснюють відлік аргументів всіх узагальнених векторів, контролюють вихідний струм активного випрямляча, через який для всіх можливих комбінацій відкритих силових ключів активного випрямляча розраховують прогнозовані значення узагальненого вектора вхідного струму активного випрямляча в його проекціях на осі нерухомої ортогональної координатної системи, контролюють поточні значення косинуса і синуса від аргументу узагальненого вектора мережної напруги, за допомогою яких зі зворотних координатних перетворень необхідних значень активної і реактивної проекцій мережного струму визначають задане значення узагальненого вектора мережного струму в його проекціях на осі абсцис і ординат нерухомої ортогональної координатної системи, обчислюють відхилення між необхідним і контрольованим значеннями вихідного струму активного випрямляча, а необхідне значення активної проекції узагальненого вектора мережного струму обчислюють у вигляді суми першої складової, прямо пропорційної цьому відхиленню, і другої складової, прямо пропорційної інтегралу від дано 2 (19) 1 3 45720 4 струму з припустимою уставкою, при цьому, якщо значення модуля узагальненого вектора відхилення мережного струму не перевищує зазначеної уставки, то примусово зберігають незмінною і відповідною попередньому моменту часу комбінацію відкритих силових ключів активного випрямляча. 4. Спосіб за п. 1, який відрізняється тим, що додатково розраховують абсолютне значення від обчисленого відхилення між необхідним і контро льованим значеннями вихідного струму активного випрямляча та порівнюють його з припустимої уставкою, при цьому, якщо розраховане абсолютне значення цього відхилення не перевищує зазначеної уставки, то примусово зберігають незмінною і відповідною попередньому моменту часу комбінацію відкритих силових ключів активного випрямляча. Корисна модель відноситься до галузі електротехніки і може бути використана для живлення навантажень постійного струму або автономних інверторів струму в частотно-регульованих електроприводах змінного струму. Відомий спосіб керування трифазним активним випрямлячем струму [Шрейнер Р. Т. Релейное управление активными токовыми преобразователями частоты / Р. Т. Шрейнер, А. А. Ефимов, И. А. Мухаматшин // Электротехника. - 2005. - №9. С.50-51], заснований на релейному пофазному керуванні мережними струмами активного випрямляча, у якому реалізуються ковзні режими регулювання мережних струмів (які задаються за допомогою поверхонь розриву через похідні завдання на фазні мережні струми для кожної фази). При цьому відомому способу властива відносна складність технічної реалізації, обумовлена збільшеним числом контрольованих операцій (зокрема: контролю мережних фазних напруг та струмів, вхідних фазних напруг та вихідного струму активного випрямляча). Це вимагає, у свою чергу, встановлення збільшеної кількості давачів при технічній реалізації даного способу і призводить до здороження цієї реалізації. Іншим недоліком відомого способу є необхідність у ньому точного визначення параметрів мережного фільтра (індуктивності, активного опору). З врахуванням же того, що ряд параметрів мережного фільтра (наприклад, активний опір) у процесі роботи варіюється (від впливу струмового завантаження фільтра і температури навколишнього середовища), то невраховуване у відомому способі зазначене варіювання активного опору фільтра на практиці призводить до зниження якості (точності, швидкодії) керування трифазним активним випрямлячем струму. Найбільш близьким за сукупністю ознак до способу, який заявляється, є спосіб керування трифазним активним випрямлячем струму [Шрейнер P. T. Прогнозирующее релейно-векторное управление активными токовыми преобразователями частоты в системах электроснабжения и электропривода/ Р. Т. Шрейнер, А. А. Ефимов, И. А. Мухаматшин // Труды международной тринадцатой научно-технической конференции "Электроприводы переменного тока". - Екатеринбург: УГТУ-УПИ, 2005. - С.138-139], який полягає в тому, що задають необхідне значення вихідного струму активного випрямляча, обчислюють необхідне значення активної проекції і задають необхідне значення реактивної проекції узагальненого вектора мережного струму відповідно на осі абсцис і ординат обертової ортогональної координатної системи, орієнтованої віссю абсцис за узагальненим вектором мережної напруги, контролюють мережні фазні напруги і струми, вхідні фазні напруги активного випрямляча, через які розраховують відповідні поточні узагальнені вектори мережних напруги і струму, вхідної напруги активного випрямляча в їх проекціях на осі абсцис і ординат нерухомої ортогональної координатної системи, орієнтованої віссю абсцис за геометричною віссю обмотки фази "а" силового трансформатора, від якої здійснюють відлік аргументів всіх узагальнених векторів, контролюють вихідний струм активного випрямляча, через який для всіх можливих комбінацій відкритих силових ключів активного випрямляча розраховують прогнозовані значення узагальненого вектора вхідного струму активного випрямляча в його проекціях на осі нерухомої ортогональної координатної системи, контролюють поточні значення косинуса і синуса від аргументу узагальненого вектора мережної напруги, за допомогою яких зі зворотних координатних перетворень необхідних значень активної і реактивної проекцій мережного струму визначають задане значення узагальненого вектора мережного струму в його проекціях на осі абсцис і ординат нерухомої ортогональної координатної системи, обчислюють для всіх можливих комбінацій силових ключів активного випрямляча прогнозовані значення узагальненого вектора мережного струму у вигляді суми чотирьох доданків, перший з який дорівнює добутку першого розрахункового коефіцієнта на поточне значення узагальненого вектора мережної напруги, другий - добутку другого розрахункового коефіцієнта на поточне значення узагальненого вектора мережного струму, третій добутку третього розрахункового коефіцієнта на поточне значення узагальненого вектора вхідної напруги активного випрямляча, четвертий - добутку четвертого розрахункового коефіцієнта на поточне значення вхідного струму активного випрямляча, обчислюють відхилення між необхідним і контрольованим значеннями вихідного струму активного випрямляча, а необхідне значення активної проекції узагальненого вектора мережного струму обчислюють у вигляді суми першої складової, прямо пропорційної цьому відхиленню, і другої складової, прямо пропорційної інтегралу від даного відхилення, при цьому знаходять відхилення між заданим і прогнозованими значеннями уза 5 гальненого вектора мережного струму, порівнюють ці відхилення між собою і визначають найменше з зазначених відхилень, причому нову комбінацію силових ключів активного випрямляча задають відповідною згаданому найменшому з відхилень. Недоліком відомого способу є відносна технічна складність, яка обумовлена збільшеним числом контрольованих у ньому параметрів: фазних мережних напруг і струмів, вхідних фазних напруг і вихідного струму активного випрямляча (що вимагає при його реалізації встановлення збільшеного числа давачів). Інший недолік відомого способу полягає у відносній складності здійснюваного обчислення чотирьох розрахункових коефіцієнтів, тому що їх значення варіюються не тільки від тривалості поточного інтервалу часу їх розрахунку, але і - від значень параметрів (індуктивності, ємності й активного опору) мережного фільтра. При цьому, у свою чергу, ряд значень параметрів мережного фільтра (наприклад, активний опір) не залишається незмінним, а варіюється в процесі роботи (через зміну струмового завантаження або температури навколишнього середовища), що знижує якість керування у відомому способі (який дані можливі зміни параметрів не враховує). В основу корисної моделі поставлено завдання розробки способу керування трифазним активним випрямлячем струму, у якому за рахунок зменшення числа контрольованих операцій і застосування простих нових обчислювальних операцій (для знаходження поточного значення комбінації відкритих силових ключів активного випрямляча) виключається при технічній реалізації цього способу необхідність встановлення давачів вхідної фазної напруги активного випрямляча і забезпечується спрощення і здешевлення технічної реалізації способу при збереженні високої якості керування активним випрямлячем струму. Для вирішення поставленого завдання в способі керування трифазним активним випрямлячем струму, який полягає в тім, що задають необхідне значення вихідного струму активного випрямляча, обчислюють необхідне значення активної проекції і задають необхідне значення реактивної проекції узагальненого вектора мережного струму відповідно на осі абсцис і ординат обертової ортогональної координатної системи, орієнтованої віссю абсцис за узагальненим вектором мережної напруги, контролюють фазні мережні напруги і струми, через які розраховують відповідні поточні узагальнені вектори мережних напруги і струму в їх проекціях на осі абсцис і ординат нерухомої ортогональної координатної системи, орієнтованої віссю абсцис за геометричною віссю обмотки фази "а" силового трансформатора, від якої здійснюють відлік аргументів всіх узагальнених векторів, контролюють вихідний струм активного випрямляча, через який для всіх можливих комбінацій відкритих силових ключів активного випрямляча розраховують прогнозовані значення узагальненого вектора вхідного струму активного випрямляча в його проекціях на осі нерухомої ортогональної координатної системи, контролюють поточні значення косинуса і синуса від аргументу узагальненого вектора мережної напруги, за допомогою яких зі зворотних 45720 6 координатних перетворень необхідних значень активної і реактивної проекцій мережного струму визначають задане значення узагальненого вектора мережного струму в його проекціях на осі абсцис і ординат нерухомої ортогональної координатної системи, обчислюють відхилення між необхідним і контрольованим значеннями вихідного струму активного випрямляча, а необхідне значення активної проекції узагальненого вектора мережного струму обчислюють у вигляді суми першої складової, прямо пропорційної цьому відхиленню, і другої складової, прямо пропорційної інтегралу від даного відхилення, у відповідності з корисною моделлю обчислюють відхилення між проекціями заданого і поточного узагальнених векторів мережного струму на відповідні осі абсцис і ординат нерухомої ортогональної координатної системи, розраховують у вигляді кореня квадратного із суми квадратів цих відхилень модуль узагальненого вектора відхилення мережного струму, обчислюють значення косинуса і синуса від аргументу узагальненого вектора відхилення мережного струму у вигляді відповідно відношень проекцій цього вектора на осі абсцис і ординат нерухомої ортогональної координатної системи до модуля цього вектора, для всіх можливих комбінацій відкритих силових ключів активного випрямляча розраховують значення косинуса і синуса від аргументу прогнозованих узагальнених векторів вхідного струму активного випрямляча у вигляді відношень прогнозованих значень проекцій цих векторів відповідно на осі абсцис і ординат нерухомої ортогональної координатної системи до кореня квадратного із суми квадратів цих проекцій, обчислюють для всіх можливих комбінацій силових ключів активного випрямляча прогнозуючий функціонал у вигляді двох доданків, перший з яких дорівнює добутку косинусів від аргументів узагальненого вектора відхилення мережного струму та прогнозованого узагальненого вектора вхідного струму активного випрямляча, а інший доданок дорівнює добутку синусів від аргументів цих векторів, визначають найбільше значення зазначеного функціонала, причому нову комбінацію силових ключів активного випрямляча задають відповідною згаданому найбільшому значенню прогнозуючого функціонала. Для підвищення швидкодії і точності регулювання вихідного струму активного випрямляча додатково контролюють електрорушійну силу (ЕРС) навантаження, підключеного на стороні постійного струму активного випрямляча, а необхідне значення активної проекції узагальненого вектора мережного струму обчислюють у вигляді суми трьох складових, причому третя складова прямо пропорційна добутку контрольованих ЕРС і струму навантаження. Для зменшення частоти перемикання силових ключів активного випрямляча в сталих режимах додатково порівнюють розраховане значення модуля узагальненого вектора відхилення мережного струму з припустимою уставкою, при цьому, якщо значення модуля узагальненого вектора відхилення мережного струму не перевищує зазначеної уставки, то примусово зберігають незмінною і від 7 повідною попередньому моменту часу комбінацію відкритих силових ключів активного випрямляча. Також для зниження частоти перемикань силових ключів активного випрямляча в сталих режимах додатково розраховують абсолютне значення від обчисленого відхилення між необхідним і контрольованим значеннями вихідного струму активного випрямляча та порівнюють його з припустимої уставкою, при цьому, якщо розраховане абсолютне значення цього відхилення не перевищує зазначеної уставки, то примусово зберігають незмінною і відповідною попередньому моменту часу комбінацію відкритих силових ключів активного випрямляча. За рахунок зменшення в запропонованому способі числа контрольованих операцій (що досягається застосуванням в ньому нових обчислювальних операцій для знаходження поточного значення комбінації відкритих силових ключів активного випрямляча) виключається необхідність встановлення давачів вхідної фазної напруги активного випрямляча. Це спрощує й здешевлює технічну реалізацію запропонованого способу. Крім цього, у запропонованому способі здійснюються більш прості (у порівнянні із здійснюваними в прототипі при знаходженні чотирьох розрахункових коефіцієнтів, що залежать від часу розрахунку і параметрів мережного фільтра) обчислення, які не вимагають, у свою чергу, розрахунків у функції часу чи параметрів мережного фільтра, які змінюються в експлуатації. При цьому забезпечуванні спрощення і здешевлення технічної реалізації запропонованого способу досягаються без зниження якості керування активним випрямлячем. Суть корисної моделі пояснюється кресленнями: на фіг. 1 - функціональна схема варіанта пристрою, яка реалізує запропонований спосіб; на фіг. 2 -функціональна схема варіанта пристрою, яка реалізує запропонований спосіб при підвищенні швидкодії та точності регулювання вихідного струму активного випрямляча; на фіг. 3 й фіг. 4 можливі варіанти пристроїв, які реалізують запропонований спосіб при зменшенні частоти перемикання силових ключів активного випрямляча в сталих режимах. Функціональна схема пристрою на фіг. 1 містить: трифазний активний випрямляч 1, виконаний на шести силових ключах 2-7 (показаних на фіг. 1 у вигляді тиристорів, що замикаються) і приєднаний своїм трифазним входом через послідовно підключені мережний трифазний LC-фільтр 8 і блок давачів струму 9 до трифазної мережі живлення 10 змінної напруги, а виходом активний випрямляч 1 пов'язаний через згладжуючий реактор 11 і давач струму 12 з навантаженням 13 (показаним в загальному випадку у вигляді послідовно з'єднаних ЕРС 14, резистора 15 та індуктивності 16). Перший вхід пропорційно-інтегрального регулятора 17 з'єднаний з виходом задавача вихідного струму 18, а другий вхід - з виходом давача струму 12. Регулятор 17 містить перший 19 і другий 20 суматори, пропорційну 21 і інтегральну 22 ланки, входи яких з'єднані разом і підключені до виходу першого суматора 19, виходи пропорційної 21 і 45720 8 інтегральної 22 ланок під'єднані відповідно до першого і другого входів суматора 20, вихід якого є виходом регулятора 17, а першим і другим входами регулятора 17 є відповідно перший і другий входи суматора 19. Перший і другий входи координатного перетворювача 23 під'єднані відповідно до виходу пропорційно-інтегрального регулятора 17 і виходу задавача реактивної проекції мережного струму 24, а його третій і четвертий входи - пов'язані через послідовно підключені перший обчислювач гармонійних функцій 25, перший перетворювач фаз 26 і блок давачів напруги 27 із трифазною мережею живлення 10. Перший і другий виходи координатного перетворювача 23 під'єднані відповідно до першого і другого входів обчислювача відхилень 28, у якого третій і четвертий входи пов'язані через другий перетворювач фаз 29 з виходами блоку давачів струму 9, а перший і другий виходи обчислювача відхилень 28 пов'язані через другий обчислювач гармонійних функцій 30 з першим і другим входами обчислювача прогнозуючого функціонала 31. Обчислювач проекцій вхідного струму 32 підключений входом до виходу датчика струму 12 і пов'язаний своїми першим і другим виходами через третій обчислювач гармонійних функцій 33 з третім і четвертим входами обчислювача прогнозуючого функціонала 31, вихід якого пов'язаний через послідовно підключені блок визначення комбінації 34 та систему керування випрямлячем 35 з керуючими входами силових ключів 2-7 активного випрямляча 1. При цьому перший 25, другий 30 та третій 33 обчислювачі гармонійних функцій виконані між собою ідентично і складаються (як показано на прикладі обчислювача 30) з ділильних блоків 36, 37 й квадратора 38, причому перший вхід ділильного блоку 36 з'єднаний з першим входом квадратора 38 і є першим входом обчислювача 30, перший вхід ділильного блоку 37 з'єднаний із другим входом квадратора 38 і є другим входом обчислювача 30, а виходи ділильних блоків 36 і 37 є відповідно першим і другим виходами обчислювачів 25, 30 і 33, при цьому вихід квадратора 38 приєднаний до других входів ділильних блоків 36, 37 і є третім виходом обчислювачів 25, 30 і 33. Обчислювач прогнозуючого функціонала 31 містить множні блоки 39 і 40, підключені своїми виходами до першого і другого входів суматора 41, вихід якого є виходом обчислювача 31, перший та другий входи множного блоку 39 є відповідно першим і третім входами обчислювача 31, а перший і другий входи множного блоку 40 є відповідно другим і четвертим входами обчислювача прогнозуючого функціонала 31. Функціональна схема пристрою на фіг. 2, яка реалізує запропонований спосіб керування при підвищенні швидкодії та точності регулювання вихідного струму активного випрямляча, містить додатково (у порівнянні з пристроєм, представленим на фіг. 1) давач ЕРС 42, множний блок 43 та суматор 44, причому давач ЕРС 42 підключений своїми входами до ЕРС 14 навантаження 13, а виходом - до першого входу множного блоку 43, у 9 якого другий вхід підключений до виходу давача струму 12, а вихід - до першого входу суматора 44, під'єднаного своїм другим входом до виходу пропорційно-інтегрального регулятора 17, а виходом до першого входу координатного перетворювача 23. При цьому на фіг. 2 показаний можливий варіант виконання силових ключів 2-7 активного випрямляча 1 на IGBT-транзисторах (зустрічно паралельно яким і послідовно з кожним із транзисторів 45 підключені діоди 46 і 47). Функціональна схема пристрою на фіг. 3, яка реалізує запропонований спосіб при зменшенні частоти перемикання силових ключів активного випрямляча в сталих режимах, містить додатково (у порівнянні з пристроєм, представленим на фіг.1) регістр 48 та компаратор 49, причому регістр 48 приєднаний між виходом блоку визначення комбінації 34 й входом системи керування випрямлячем 35, а керуючий вхід регістра 48 пов'язаний через компаратор 49 із третім виходом другого обчислювача гармонійних функцій 30. Функціональна схема пристрою на фіг. 4, що реалізує запропонований спосіб при другому можливому варіанті зменшення частоти перемикання силових ключів активного випрямляча в сталих режимах, містить додатково (у порівнянні з пристроєм, представленим на фіг. 1) регістр 48, компаратор 49 і обчислювач модуля 50, причому регістр 48 під'єднаний між виходом блоку визначення комбінації 34 і входом системи керування випрямлячем 35, а керуючий вхід регістра 48 пов'язаний через послідовно з'єднані компаратор 49 та обчислювач модуля 50 з виходом суматора 19 у регуляторі 17. Запропонований спосіб керування трифазним активним випрямлячем струму здійснюється (розглянемо на прикладі пристрою, показаного на фіг. 1) наступним чином. За допомогою задавача вихідного струму 18 та задавача реактивної проекції 24 задають для активного випрямляча 1 необхідні значення відповідно вихідного струму I*d і реактивної проекції I*Σy (на вісь ординат "у" обертової ортогональної координатної системи "х - у", орієнтованої віссю абсцис "х" за узагальненим вектором мережної напруги U ) узагальненого вектора ме I режного струму S . Контролюють давачем струму 12 вихідний струм активного випрямляча 1 і обчислюють за допомогою суматора 19 відхилення ∆Id між необхідним I*d та контрольованим Id значеннями вихідного струму активного випрямляча 1 у вигляді: ∆Id=I*d -Id. (1) Необхідне значення активної проекції I*Σx узаI гальненого вектора мережного струму S обчислюють на виході суматора 20 (що входить до складу регулятора 17) у вигляді суми першої складової I*Σx1 (яка надходить з виходу пропорційної ланки 21 і прямо пропорційної відхиленню ∆Id вихідного струму випрямляча) та другої складової I*Σx2 (яка надходить з виходу інтегральної ланки 22 і прямо пропорційної інтегралу від даного відхилення струму ∆Id). 45720 10 ü ï * * ISx = I* x1 + ISx 2 , ï S ï ï I* x1 = K × DId, ý, S ï t ï 1 * ISx 2 = DIddt ï Т ï 0 þ (2) де К і 1/Т - відповідні коефіцієнти пропорційності; Т - стала часу інтегральної ланки 22. За рахунок підбору певних значень коефіцієнта К та сталої часу Т пропорційно-інтегрального регулятора 17 здійснюється настроювання значень перерегулювання й часу регулювання для вихідного струму Id активного випрямляча при збережені (за рахунок наявності інтегральної складової у вихідному сигналі регулятора 17) астатичного (без помилки) регулювання зазначеного струму (Id =I*d ) y сталих режимах. За допомогою блоку давачів напруги 27 та блоку давачів струму 9 контролюють відповідно фазні мережні напруги UA,UB,UC і струми IΣА, I*ΣВ, I*ΣС. Через них розраховують за допомогою перетворювачів фаз 26 і 29 відповідно поточні узагаль ò I нені вектори мережної напруги U і струму S в їх проекціях Uα, Uβ та IΣα, IΣβ на осі абсцис "α" і ординат "β" нерухомої ортогональної координатної системи " α - β " (орієнтованої віссю абсцис " α " за геометричною віссю обмотки фази "а" силового трансформатора трифазної мережі живлення 10): ü U = Ua + jUb ï Ua = UA , Ub = (UВ - UС ) / 3 ;ï ï ý ІS = ISa + jISb , ï ï ISa = ISA ,ISb = (ISB - ISC ) / 3 .ï þ (3) При цьому від зазначеної осі "α" здійснюють відлік аргументів всіх узагальнених векторів. За допомогою блоків давачів напруги 27 та струму 9 достатньо контролювати лише по два фазних значення мережних напруг (наприклад, UA та UB) і мережних струмів (наприклад, IΣА та IΣВ), розраховуючи при цьому проекції Uα, Uβ й IΣα, IΣβ узагальнених векторів мережних напруги і струму з наступних співвідношень [Пивняк Г. Г. Современные частотно-регулируемые асинхронные электроприводы с широтно-импульсной модуляцией / Г. Г. Пивняк, А. В. Волков /. - Днепропетровск: НГУ, 2006. -С. 161: Ua = UA , Ub = (UA + 2UB ) / 3 ;ü ï ý ІSa = ІSА , ІSb = (ІSА + 2ІSВ ) / 3 .ï þ (4) За допомогою першого обчислювача гармонійних функцій 25 (виконаного аналогічно обчислювачу 30 у вигляді двох ділильних блоків 36, 37 та квадратора 38) контролюють поточні значення косинуса і синуса від аргументу θU узагальненого вектора мережної напруги U , обчислюючи їх через проекції Uα,Uβ зазначеного вектора зі співвідношень: 11 45720 ü cos qU = Ua / U,ï ï sin qU = Ub / U, ý ï 2 U = U2 + Ub ï a þ , (5) U= де U - модуль узагальненого вектора мережної напруги. Через зазначені значення гармонійних функцій cosθU, sinθU зі зворотних координатних перетворень [Пивняк Г. Г. Современные частотнорегулируемые асинхронные электроприводы с широтно-импульсной модуляцией / Г. Г. Пивняк, А. В. Волков /. - Днепропетровск: НГУ, 2006. - С.71] необхідних значень активної I*Σx та реактивної I*Σy проекцій мережного струму визначають задане значення узагальненого вектора мережного стру I* му S в його проекціях I*Σα, I*Σβ на осі абсцис "α" і ординат "β" нерухомої ортогональної координатної системи " α-β": ü * * * ІS = ІSa + jІSb , ï ï * * * ІSa = ІSx cos qU - ІSy sin qU,ý ï * * * ІSb = ІSx sin qU + ІSy cos qU. ï þ (6) За допомогою обчислювача відхилень 28 визначають відхилення ∆IΣα, ∆IΣβ між відповідними проекціями I*Σα, I*Σβ та IΣα, IΣβ заданого ного I* S і поточ IS узагальнених векторів мережного струму: * DІSa = ІSa - ІSa ,ü ï ý * DІSb = ІSb - ІSb ï þ (7) на осі абсцис " α" і ординат " β" нерухомої ортогональної координатної системи "α-β". В обчислювачі 30 за допомогою квадратора 38 розраховують у вигляді кореня квадратного із суми квадратів від відхилень ∆IΣα, ∆IΣβ, модуль ∆IΣ уза 12 гальненого вектора відхилення мережного струму IS : DІS = DІ2 a + DІ2b . S S (8) За допомогою ділильних блоків 36 та 37 обчислювача 30 розраховують значення косинуса й синуса від аргументу θ∆I узагальненого вектора DI відхилення мережного струму S у вигляді відповідно відношень проекцій ∆ ∆IΣα, ∆IΣβ цього вектора на осі абсцис "α" і ординат "β" нерухомої ортогональної координатної системи "α-β" до модуля ∆IΣ цього вектора: cos q DІ = DІSa / DІS ,ï ü sin q DІ = DІSb / DІS . ý ï þ (9) Через контрольоване значення вихідного струму Id активного випрямляча 1 розраховують за допомогою обчислювача проекцій вхідного струму 32 для всіх можливих комбінацій m=1,2,...6 відкритих силових ключів активного випрямляча 1 (показаних знаком "+" в табл.1) прогнозовані значення узагальненого вектора вхідного струму I(m) активного випрямляча в його проекціях Iα(m), Iβ(m) на осі нерухомої ортогональної координатної системи "α-β". 2 ü Іa (m) = Id × cos qI (m),ï 3 ï ï 2 ï Іb (m) = Id × sin qI (m), ý 3 ï ï p p ï q1(m) = + (m - 1) ï 6 3 þ (10) де θI(m) - значення аргументу прогнозованого узагальненого вектора вхідного струму I(m) , ї(т) активного випрямляча. Таблиця 1 Комбінації відкритих (показані знаком "+") силових ключів активного випрямляча 1 Відкриті силові ключі випрямляча Номер комбінації m 1 2 3 4 5 6 3 5 + + + I(m) активного 6 7 + + + + За допомогою обчислювача гармонійних функцій 33 для всіх можливих комбінацій (m=1,2,...6 з табл. 1) відкритих силових ключів активного випрямляча 1 розраховують значення косинуса і синуса від аргументу θI(m) прогнозованих узагальнених векторів вхідного струму 4 + + 2 + + + випрямляча у вигляді відношень прогнозованих значень проекцій Iα(m), Iβ(m) цих векторів відповідно на осі абсцис "α" і ординат "β" нерухомої ортогональної координатної системи "α-β" до кореня квадратного із суми квадратів цих проекцій: 13 45720 ü 2 2 cos qI (m) = Ia (m) / Ia (m) + Ib (m) ,ï ý 2 2 sin qI (m) = Ib (m) / Ia (m) + Ib (m) . ï þ (11) За допомогою обчислювача 31 обчислюють для всіх можливих комбінацій (m=1,2,...6 з табл. 1) відкритих силових ключів активного випрямляча 1 прогнозуючий функціонал F(m) у вигляді двох доданків, перший з яких дорівнює добутку косинусів від аргументів θ∆I та θI(m) відповідно узагальнено DIS го вектора відхилення мережного струму і прогнозованого узагальненого вектора вхідного струму I(m) активного випрямляча, а другий доданок дорівнює добутку синусів від аргументів цих векторів: F(m) = cos q DI × cos qI (m) + sin q DI × sin qI (m). (12) За допомогою блоку визначення комбінації 34 знаходять найбільше значення F° (m*) згаданого функціонала: F° (m*) = max{ F(m),при m = 1,2,...6} (13) і значення комбінації m*, при якому воно досягається. За допомогою системи керування випрямлячем 35 (яка забезпечує відповідно до визначеного значення комбінації m* та згідно табл. 1 формування відпираючих імпульсів для відповідних силових ключів 2-7 активного випрямляча) задають в якості нової згадану комбінацію m* відкритих силових ключів активного випрямляча 1. Попередньо проведеними дослідженнями встановлено, що при довільній m-ій комбінації відкритих силових ключів активного випрямляча прогнозоване змінювання мережного струму DI` S узагальненого вектора DI` (m) = IS (m) - IS (0) S (14) на будь-якому міжкомутаційному інтервалі силових ключів активного випрямляча колінеарно (паралельно та співпадає за напрямком) із прогнозованим (при відповідній m-ій комбінації силових ключів активного випрямляча) значенням узагальненого вектора вхідного струму І(m) активного випрямляча: DI` (m) I(m) S (15) I (0) IS (m) і - відповідно початкове та проде S гнозоване поточне (при m-ій комбінації силових ключів активного випрямляча) значення узагальI неного вектора мережного струму S на розглянутому міжкомутаційному інтервалі силових ключів активного випрямляча. З врахуванням цього найбільш швидкодіюче і точне відпрацювання виниклих згідно (7) відхилень проекцій ∆ІΣα, ∆ІΣβ мережного струму (які характеризуються узагальненим вектором відхилення меDIS режного струму ) відбувається за умови найкращого збігу між собою за напрямком згаданого 14 узагальненого струму DIS вектора відхилення мережного та прогнозованого узагальненого век DI` (m) S узагальненого вектора тора змінювання мережного струму. Або, з врахуванням (15), - при найкращому збігу між собою за напрямком узагальненого вектора відхилення мережного струму DIS та прогнозованого значення (при m-ій комбінації силових ключів активного випрямляча) уза гальненого вектора вхідного струму I(m) цього випрямляча. Оскільки співвідношення (12) для обчислення прогнозуючого функціонала F(m) представляє собою косинус різниці аргументів θ∆I і θI (m) узагальDI нених векторів відхилення мережного струму S та прогнозованого значення узагальненого векто ра вхідного струму I(m) активного випрямляча 1: F(m) = cos[q DI - qI (m)], (16) то визначене блоком 34 значення нової комбінації m* відкритих силових ключів активного випрямляча відповідає з врахуванням (13) найменшій (за абсолютною величиною) різниці аргументів зазначених узагальнених векторів: q DI - qI (m* ) = min. (17) Таким чином, через систему керування випрямлячем 35 задають нову комбінацію m* зазначених силових ключів активного випрямляча 1 такою, яка забезпечує найкращий (з найменшим можливим відхиленням) збіг за напрямком для узагальнених векторів відхилення мережного струму DIS DI (m*) та змінювання S узагальненого вектора мережного струму. При функціонуванні запропонованого способу в динамічних режимах (які характеризуються збі льшеними відхиленнями ∆Id, ∆IΣα, ∆IΣβ між необхідним Id* та контрольованим Id значеннями вихідного струму активного випрямляча або між заданими IΣα*, IΣβ* та поточними IΣα, IΣβ проекціями узагальненого вектора мережного струму) - забезпечується швидкодіюче відпрацювання зазначених відхилень струму, що приводить по закінченні їх відпрацювання до наближення даних відхилень до нуля: ∆Id, ∆IΣα, ∆IΣβ≈0. У сталих же режимах роботи (які наступили по закінченні відпрацювання згаданих вище відхилень) підтримуються на необхідних для них рівнях (відповідно I*d та I*Σy) вихідний струм Id активного випрямляча та поточне значення реактивної проекції ІΣу (на вісь ординат "у" обертової ортогональної координатної системи "х - у") узагальненого вектора мережного струму Id » I* , ü d ï ý ISy » I* y ï S þ (18) DIS : 15 45720 Таким чином, при розглянутому керуванні в сталих режимах роботи в навантаження 13 задається необхідне значення Id*, струму й одночасно з цим підтримується необхідне значення IΣy*, реактивної проекції мережного струму (за рахунок останнього здійснюється можливість компенсації за допомогою активного випрямляча 1 реактивної потужності сусідніх електроспоживачів, підключених до тієї ж трифазної мережі 10). Очевидно, при завданні необхідного значення реактивної проекції IΣy* узагальненого вектора мережного струму рівним нулю, запропонованим способом підтримується чисто активний характер мережного струму активного випрямляча 1 (з мережним коефіцієнтом потужності близьким до одиниці). При функціонуванні розглянутого способу (реалізованого в пристрої на фіг. 1) немає необхідності в встановлені блоку давачів фазних напруг активного випрямляча й у визначенні параметрів (індуктивності, ємності, активного опору) фільтра (як це необхідно в прототипі), що спрощує й здешевлює технічну реалізацію запропонованого способу при збереженні високої якості керування активним випрямлячем. Спосіб керування трифазним активним випрямлячем струму, який дозволяє підвищити швидкодію та точність регулювання вихідного струму активного випрямляча і реалізований в пристрої на фіг. 2, здійснюється аналогічно описаному раніше (на прикладі пристрою на фіг. 1) з наступними відмінностями. А саме, за допомогою давача ЕРС 42 контролюють електрорушійну силу Ен навантаження 13, підключеного на стороні постійного струму активного випрямляча 1. За допомогою суматора 44 необхідне значен* ІS* х ня активної проекції узагальненого вектора мережного струму обчислюють у вигляді суми трьох складових: І* *х = І* х1 + І* х 2 + І* х 3 , S S S S (19) І* ( Sх1 І* де дві перші та Sх 2 ) з них визначаються з раніше розглянутого співвідношення (2), а третя І* складова Sх 3 прямо пропорційна (з коефіцієнтом С) добутку контрольованих ЕРС Ен та струму Id навантаження 13: І* х 3 = С × Ен × Іd . S (20) Запишемо (з врахуванням нехтування активними втратами потужності в мережному фільтрі 8 та активному випрямлячі 1, які на практиці достатньо малі) спрощене співвідношення для балансу активних потужностей на вході і виході активного випрямляча: 3 US × ISx » Eн × Id + R н × I2 , d 2 (21) де UΣ - модуль узагальненого вектора мережної напруги; IΣx - активна проекція узагальненого вектора мережного струму (на вісь абсцис "х" обертової ортогональної координатної системи "х - у", зв'язаної віссю абсцис з узагальненим вектором 16 U мережної напруги S ); Rн - активний опір резистора 15 навантаження 13. З останнього співвідношення визначають складову ІΣх3 активної проекції ІΣх мережного струму, яка викликана безпосередньо впливом тільки ЕРС Ен навантаження: 2 ІSх 3 » × Eн × Id . 3US (22) Вибравши в (20) значення сталої С рівної: 2 , С= 3US (23) одержимо, що обчислена на виході множного блоку 43 третя складова активної проекції І* *х S * ІSх 3 заданого значення мережного струму дорівнює * ІSх 3 складовій активної проекції мережного струму із (22), викликаній безпосередньо впливом тільки ЕРС Ен навантаження: І* х 3 = ISx 3. S (24) З врахуванням останнього, при можливих змінах значень ЕРС Ен, що відбуваються, в навантаженні 13 автоматично (від впливу вихідного сигна І* лу Sх 3 , множного блоку 43 через суматор 44 на перший з входів координатного перетворювача 23) здійснюється одночасне з цим і відповідне даній зміні ЕРС Ен навантаження змінювання на величину ІSх 3 із (22) завдання активної проекції мереж І* * ного струму Sх 3 . За рахунок цього не потрібне додавання зазначеної складової ІΣх3 активної проекції мережного струму (обумовленої безпосередньо впливом зміни ЕРС Ен навантаження) з виходу пропорційно-інтегрального регулятора 17. У результаті зазначеного функціонування запропонованого способу при розглянутій зміні ЕРС Ен навантаження 13 на виході суматора 19 пропорційноінтегрального регулятора 17 практично не виникає відхилення ∆ld (викликаного впливом зміни зазначеної ЕРС Ен навантаження) між заданим Id* і фактичним Id значеннями вихідного струму активного випрямляча, чим і забезпечується підвищення швидкодії і точності регулювання вихідного струму активного випрямляча в запропонованому способі, який ілюструється пристроєм на фіг. 2. У відомих способах або способі, що заявляється і який ілюструється пристроєм на фіг. 1, при зміні значення ЕРС Ен навантаження згадана зміна на величину ІΣх3 із (22) поточної активної проекції мережного струму ІΣх відбувається в результаті відповідної зміни на цю величину вихідного сигналу пропорційно-інтегрального регулятора 17, що неминуче супроводжується виникненням відхилення (помилки) ∆ld на виході суматора 19 цього регулятора 17. Причому, приймаючи до уваги наявність інтегральної складової у вихідному сигналі цього регулятора, зміна вихідного сигналу регулятора 17 на згадану величину ІΣх3 відбувається не миттєво, а з деякою тимчасовою затримкою (обумовленою сталою часу інтегрування Т інтеграль 17 ної ланки 22, яка входить до складу регулятора 17). Зазначена часова затримка, у свою чергу, приводить на практиці до зменшення точності (зокрема, збільшенню динамічної помилки ∆ld) та зниженню швидкодії регулювання вихідного струму Id активного випрямляча при розглянутій зміні ЕРС Ен навантаження 13. Способи керування трифазним активним випрямлячем струму, які дозволяють зменшити частоту перемикання силових ключів активного випрямляча в сталих режимах і реалізовані в пристроях показаних на фіг. 3 та фіг. 4, функціонують аналогічно описаному раніше (на прикладі пристрою на фіг. 1) з наступними відмінностями. Зокрема, у пристрої на фіг. 3 порівнюють за допомогою компаратора 49 розраховане на третьому виході обчислювача гармонійних функцій 30 значення модуля ∆IΣ узагальненого вектора відхиленDI ня мережного струму S (або на фіг. 4 - обчислене на виході обчислювача модуля 50 абсолютне значення ∆׀Id ׀відхилення ∆Id між необхідним Id* і контрольованим ld значеннями вихідного струму активного випрямляча) з припустимою уставкою ∆I* цього компаратора 49. Якщо значення модуля ∆IΣ узагальненого вектора відхилення струму (в пристрої на фіг. 3) або абсолютне значення відхилення ∆׀Id ׀між необхідним Id* і контрольованим Id значеннями вихідного струму активного випрямляча (в пристрої на фіг. 4) не перевищують зазначеної уставки: ∆IΣ< ∆I* або ∆׀Id∆
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of a three-phase active current rectifier
Автори англійськоюVolkov Oleksandr Vasyliovych, Kosenko Ihor Oleksandrovych
Назва патенту російськоюСпособ управления трехфазным активным выпрямителем тока
Автори російськоюВолков Александр Васильевич, Косенко Игорь Александрович
МПК / Мітки
МПК: H02P 7/00, H02P 21/00
Мітки: спосіб, керування, випрямлячем, струму, трифазним, активним
Код посилання
<a href="https://ua.patents.su/13-45720-sposib-keruvannya-trifaznim-aktivnim-vipryamlyachem-strumu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування трифазним активним випрямлячем струму</a>
Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються
Номер патенту: 30471
Опубліковано: 25.02.2008
Автори: Косенко Ігор Олександрович, Волков Олександр Васильович
МПК: H02P 21/00, H02P 7/00
Мітки: тиристорах, електроприводі, асинхронному, струму, замикаються, інвертором, регулювання, спосіб, векторного, автономним, трифазним
Формула / Реферат:
1. Спосіб векторного регулювання струму в асинхронному електроприводі з трифазним автономним інвертором струму на тиристорах, що замикаються, який полягає у тому, що задають необхідні значення намагнічувальної і активної проекцій узагальненого вектора статорного струму двигуна відповідно на осі абсцис і ординат ортогональної координатної системи, що обертається, яка орієнтована віссю абсцис за узагальненим вектором потокозчеплення ротора...
Пристрій для керування трифазним двигуном змінного струму
Номер патенту: 75708
Опубліковано: 15.05.2006
Автор: Сємідєл Сергій Павлович
МПК: H02P 27/02
Мітки: змінного, пристрій, керування, струму, двигуном, трифазним
Формула / Реферат:
1. Пристрій для керування трифазним двигуном змінного струму, що містить вхідний фільтр, під'єднаний до джерела живлення, випрямляч, побудований на некерованих напівпровідникових ключах з його фільтруючою ланкою, трифазний транзисторний інвертор з системою керування, виходи якого безпосередньо зв'язані з контактами для підключення трифазного двигуна змінного струму та датчик струму ланки постійного струму, вихідний сигнал якого надходить на...
Спосіб прямого мікропроцесорного керування тиристорним випрямлячем та пристрій для його здійснення
Номер патенту: 48381
Опубліковано: 15.08.2002
Автори: Голубов Валерій Юрійович, Сокол Євген Іванович, Суботін Юрій Володимирович, Кипенський Андрій Володимирович
МПК: H02M 7/12
Мітки: прямого, здійснення, пристрій, спосіб, тиристорним, випрямлячем, мікропроцесорного, керування
Формула / Реферат:
1. Спосіб прямого мікропроцесорного керування тиристорним випрямлячем, що містить перетворення вихідного числа N, відповідного сигналу керування, за виразомF(N)=Nmax-N,де F(N) - результат перетворювання вихідного числа, одержаний виконанням операції віднімання;Nmax - число (постійна величина), яке при запису в таймер забезпечує формування максимального кута керування;N - вихідне число, відповідне сигналу...
Спосіб прямого мікропроцесорного керування випрямлячем за обчислювальними прогнозами
Номер патенту: 27549
Опубліковано: 12.11.2007
Автори: Кіяшко Борис Олександрович, Іванов Олександр Євгенійович, Сунанто ..., Домнін Ігор Феліксович, Бахнов Леонід Євгенійович, Сокол Євгеній Іванович, Тимченко Микола Олександрович
МПК: H02M 7/00
Мітки: керування, мікропроцесорного, прямого, спосіб, прогнозами, випрямлячем, обчислювальними
Формула / Реферат:
1. Спосіб керування тиристорним перетворювачем за обчислювальними прогнозами, який полягає у тому, що задають струм навантаження, вимірюють фактичний струм навантаження, вимірюють протиерс навантаження та визначають момент подачі чергових імпульсів керування на тиристори на кожному інтервалі дискретності, який відрізняється тим, що величину струму навантаження, що задається на наступний інтервал провідності, визначають під час комутації на...
Спосіб прогнозуючого керування випрямлячем, навантаженого на двигун, по моделі об’єкту
Номер патенту: 28769
Опубліковано: 25.12.2007
Автори: Тимченко Микола Олександрович, Кіяшко Борис Олександрович, Сунанто ..., Бахнов Леонід Євгенійович, Іванов Олександр Євгенійович, Домнін Ігор Феліксович, Сокол Євгеній Іванович
МПК: H02M 7/155, H02P 7/06, G05B 13/04
Мітки: двигун, моделі, спосіб, об'єкту, прогнозуючого, випрямлячем, керування, навантаженого
Формула / Реферат:
1. Спосіб прогнозуючого керування випрямлячем, навантаженого на двигун, по моделі об'єкта, який полягає у тому, що задають струм навантаження, вимірюють фактичний струм навантаження, вимірюють проти ЕРС навантаження та визначають момент подачі чергових імпульсів керування на тиристори на кожному інтервалі дискретності, який відрізняється тим, що момент подачі імпульсів керування визначається шляхом циклічного розрахунку функціонала на кожному...
Попередній патент: Композиція для купірування місцевої алергічної реакції, що має прояви на слизовій оболонці ротової порожнини та червоній облямівці губ
Наступний патент: Засіб для лікування хронічного рецидивуючого афтозного стоматиту, що має прояви на слизовій оболонці ротової порожнини
Випадковий патент: Спосіб визначення забрудненості фільтрів і охолоджувачів системи повітропостачання двигуна внутрішнього згоряння і пристрій для його здійснення