Спосіб прямого мікропроцесорного керування випрямлячем за обчислювальними прогнозами
Номер патенту: 27549
Опубліковано: 12.11.2007
Автори: Сунанто ..., Сокол Євгеній Іванович, Бахнов Леонід Євгенійович, Іванов Олександр Євгенійович, Домнін Ігор Феліксович, Кіяшко Борис Олександрович, Тимченко Микола Олександрович
Формула / Реферат
1. Спосіб керування тиристорним перетворювачем за обчислювальними прогнозами, який полягає у тому, що задають струм навантаження, вимірюють фактичний струм навантаження, вимірюють протиерс навантаження та визначають момент подачі чергових імпульсів керування на тиристори на кожному інтервалі дискретності, який відрізняється тим, що величину струму навантаження, що задається на наступний інтервал провідності, визначають під час комутації на поточному інтервалі провідності за допомогою розв'язання основного електромеханічного рівняння електроприводу постійного струму відносно струму якірного ланцюга двигуна іа для двох його значень, а саме: поточного та значення, яке повинно бути досягнуто на момент наступної комутації з урахуванням заданого на цей момент прискорення швидкості (темпу розгону), яке обчислюється як різниця значень заданої та поточної швидкості, що є помноженою на коефіцієнт пропорційності, та поточного значення прискорення швидкості, яке визначається за допомогою числових методів обчислювання похідної за трьома точками виміру - поточного значення, значення, яке було отримане на попередньому кроці дискретизації, та значення, яке було виміряне два кроки тому відносно поточного моменту часу.
2. Спосіб за п. 1, який відрізняється тим, що момент подачі чергових імпульсів керування на тиристори на кожному інтервалі дискретності визначається рівністю двох збільшень струмів, а саме: збільшення струму, яке необхідно відробити, щоб усунути помилку за швидкістю, яке обчислюється з поточного значення струму, та значення струму, яке було заданим під час попередньої комутації, що обчислено згідно з п. 1 на підставі різниць заданої та поточної швидкостей, та збільшення струму, яке буде відроблено від моменту поточної комутації до передбачуваного моменту наступної комутації, яке обчислюється за допомогою інтегрування різниці між кривою вихідної напруги перетворювача та протиерс навантаження на вказаному інтервалі, при цьому протиерс навантаження обчислюється з поточної швидкості двигуна, помноженої на конструктивний коефіцієнт двигуна, а момент передбачуваної комутації (передбачуваний кут керування на наступний інтервал провідності перетворювача) обчислюється як арккосинус відношення різниці поточного значення протиерс навантаження та падіння напруги на активному опорі ланцюга якоря двигуна, та постійній складовій випрямленої напруги перетворювача.
Текст
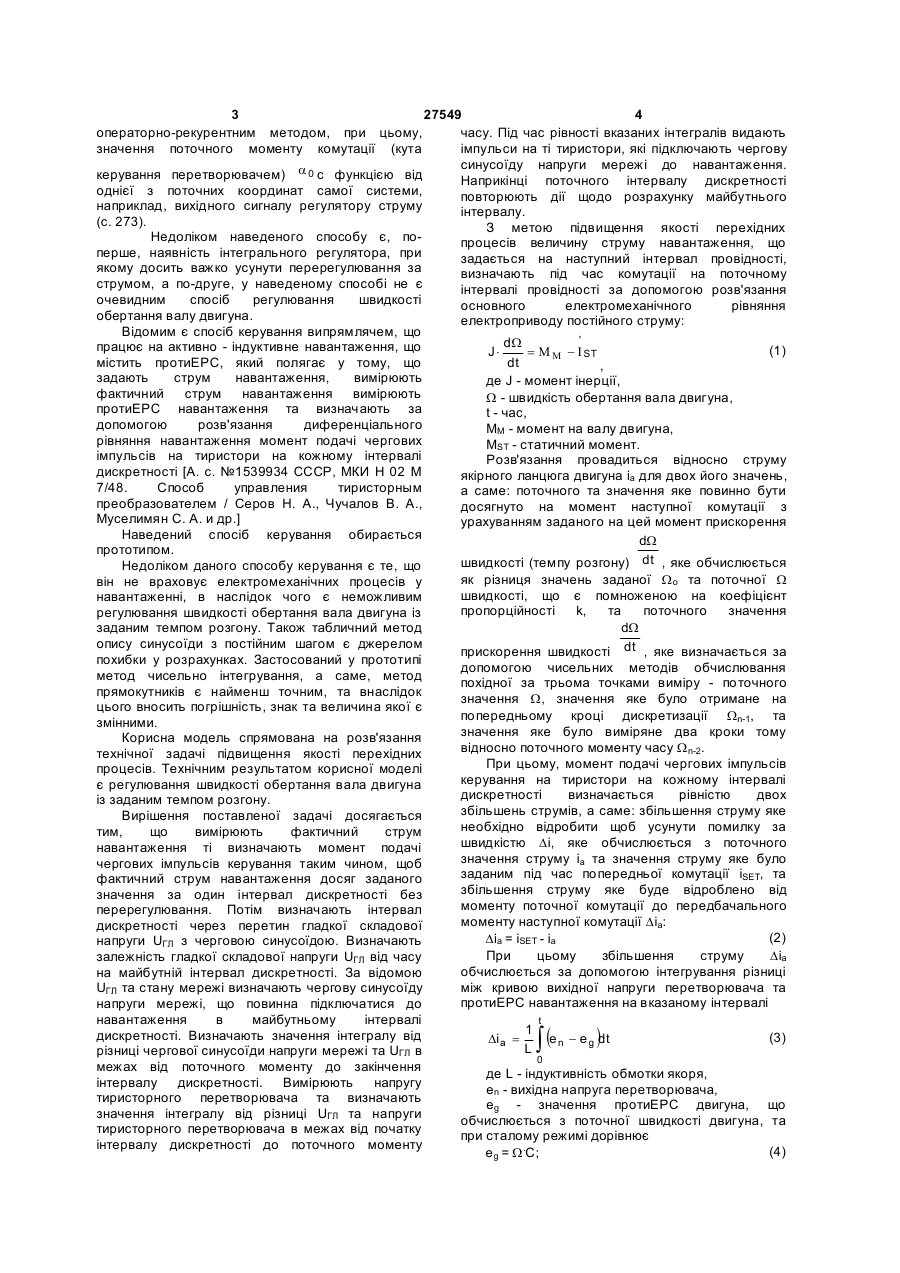
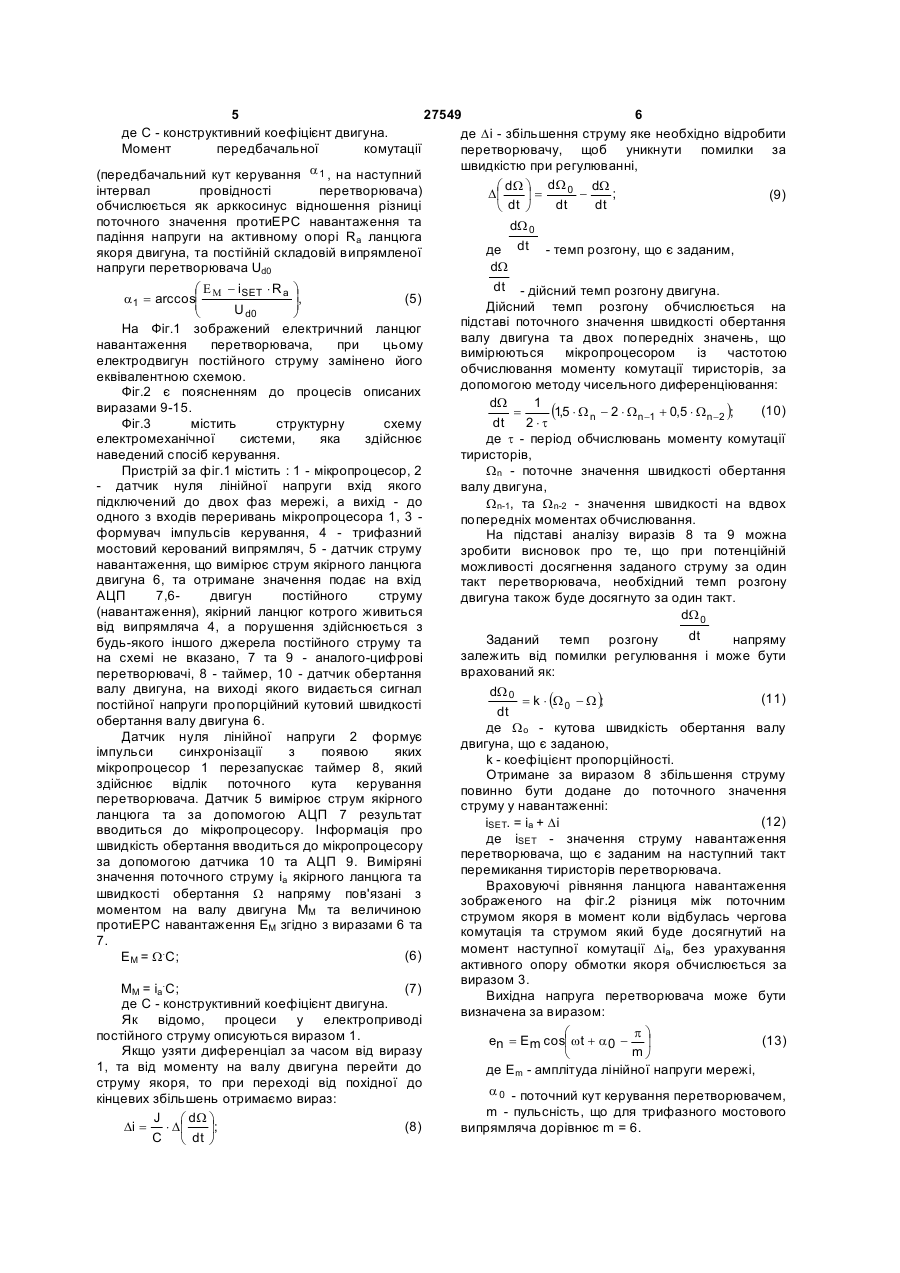
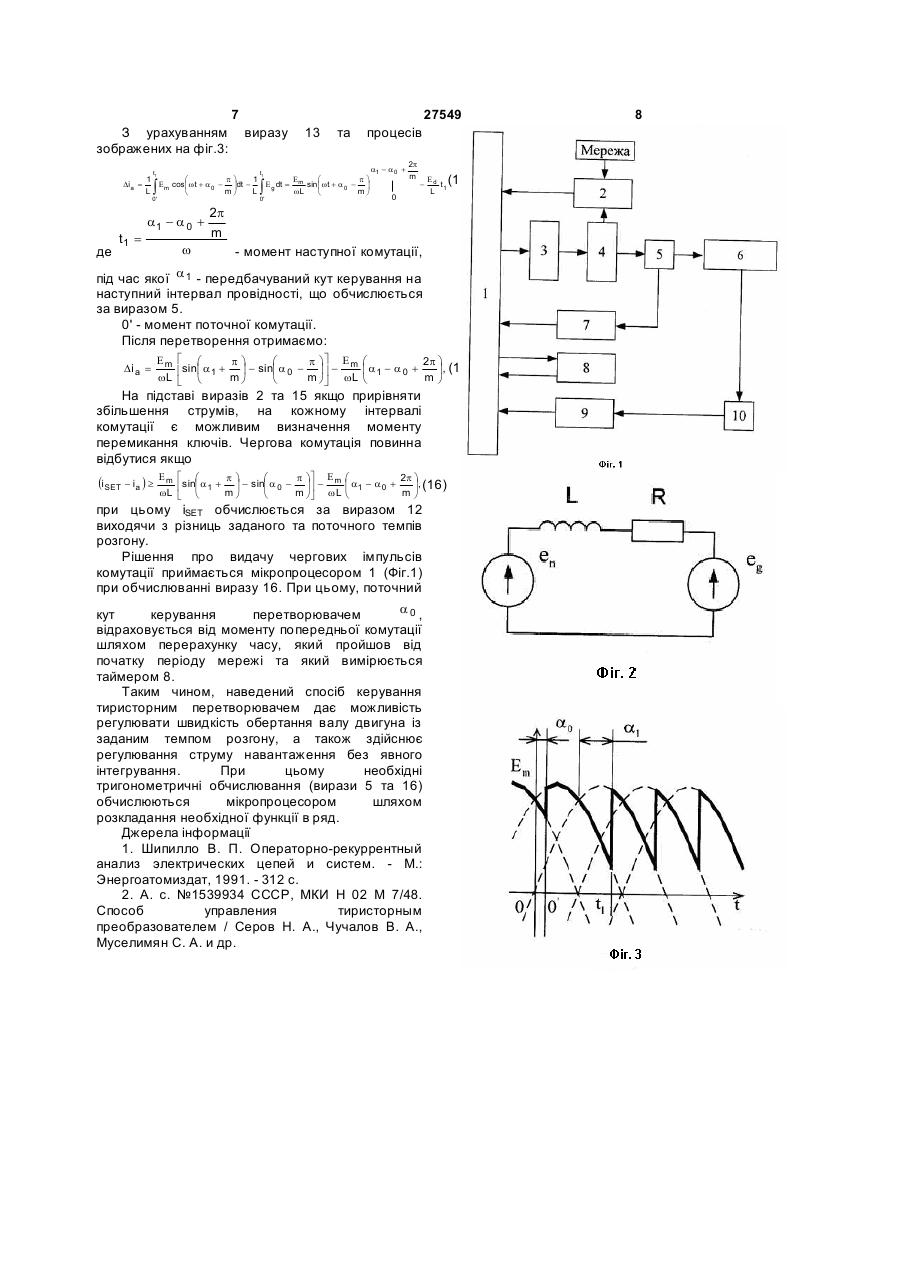
1. Спосіб керування тиристорним перетворювачем за обчислювальними прогнозами, який полягає у тому, що задають струм навантаження, вимірюють фактичний струм навантаження, вимірюють протиерс навантаження та визначають момент подачі чергових імпульсів керування на тиристори на кожному інтервалі дискретності, який відрізняється тим, що величину струму навантаження, що задається на наступний інтервал провідності, визначають під час комутації на поточному інтервалі провідності за допомогою розв'язання основного електромеханічного рівняння електроприводу постійного струму відносно струму якірного ланцюга двигуна іа для двох його значень, а саме: поточного та значення, яке повинно бути досягнуто на момент наступної комутації з урахуванням заданого на цей момент прискорення швидкості (темпу розгону), яке обчислюється як різниця значень заданої та поточної швидкості, що U 2 (13) 1 КЕРУВАННЯ 27549 ДЕРЖАВНИЙ ДЕПАРТАМЕНТ ІНТЕЛЕКТУАЛЬНОЇ ВЛАСНОСТІ ОПИС (11) МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ 3 27549 4 операторно-рекурентним методом, при цьому, часу. Під час рівності вказаних інтегралів видають значення поточного моменту комутації (кута імпульси на ті тиристори, які підключають чергову синусоїду напруги мережі до навантаження. a 0 с функцією від керування перетворювачем) Наприкінці поточного інтервалу дискретності однієї з поточних координат самої системи, повторюють дії щодо розрахунку майбутнього наприклад, вихідного сигналу регулятору струму інтервалу. (с. 273). З метою підвищення якості перехідних Недоліком наведеного способу є, попроцесів величину струму навантаження, що перше, наявність інтегрального регулятора, при задається на наступний інтервал провідності, якому досить важко усунути перерегулювання за визначають під час комутації на поточному струмом, а по-друге, у наведеному способі не є інтервалі провідності за допомогою розв'язання очевидним спосіб регулювання швидкості основного електромеханічного рівняння обертання валу двигуна. електроприводу постійного струму: Відомим є спосіб керування випрямлячем, що ' dW працює на активно - індуктивне навантаження, що (1) J× = M M - I ST dt містить протиЕРС, який полягає у тому, що , задають струм навантаження, вимірюють де J - момент інерції, фактичний струм навантаження вимірюють W - швидкість обертання вала двигуна, протиЕРС навантаження та визначають за t - час, допомогою розв'язання диференціального МM - момент на валу двигуна, рівняння навантаження момент подачі чергових MST - статичний момент. імпульсів на тиристори на кожному інтервалі Розв'язання провадиться відносно струму дискретності [А. с. №1539934 СССР, МКИ Н 02 М якірного ланцюга двигуна іа для двох його значень, 7/48. Способ управления тиристорным а саме: поточного та значення яке повинно бути преобразователем / Серов Н. А., Чучалов В. А., досягнуто на момент наступної комутації з Муселимян С. А. и др.] урахуванням заданого на цей момент прискорення Наведений спосіб керування обирається dW прототипом. швидкості (темпу розгону) dt , яке обчислюється Недоліком даного способу керування є те, що як різниця значень заданої Wo та поточної W він не враховує електромеханічних процесів у швидкості, що є помноженою на коефіцієнт навантаженні, в наслідок чого є неможливим пропорційності k, та поточного значення регулювання швидкості обертання вала двигуна із dW заданим темпом розгону. Також табличний метод опису синусоїди з постійним шагом є джерелом прискорення швидкості dt , яке визначається за похибки у розрахунках. Застосований у прототипі допомогою чисельних методів обчислювання метод чисельно інтегрування, а саме, метод похідної за трьома точками виміру - поточного прямокутників є найменш точним, та внаслідок значення W, значення яке було отримане на цього вносить погрішність, знак та величина якої є попередньому кроці дискретизації Wn-1, та змінними. значення яке було виміряне два кроки тому Корисна модель спрямована на розв'язання відносно поточного моменту часу Wn-2. технічної задачі підвищення якості перехідних При цьому, момент подачі чергових імпульсів процесів. Технічним результатом корисної моделі керування на тиристори на кожному інтервалі є регулювання швидкості обертання вала двигуна дискретності визначається рівністю двох із заданим темпом розгону. збільшень струмів, а саме: збільшення струму яке Вирішення поставленої задачі досягається необхідно відробити щоб усунути помилку за тим, що вимірюють фактичний струм швидкістю Dі, яке обчислюється з поточного навантаження ті визначають момент подачі значення струму іа та значення струму яке було чергових імпульсів керування таким чином, щоб заданим під час попередньої комутації iSET, та фактичний струм навантаження досяг заданого збільшення струму яке буде відроблено від значення за один інтервал дискретності без моменту поточної комутації до передбачального перерегулювання. Потім визначають інтервал моменту наступної комутації Diа: дискретності через перетин гладкої складової (2) Dia = iSET - ia напруги UГЛ з черговою синусоїдою. Визначають При цьому збільшення струму Dia залежність гладкої складової напруги UГЛ від часу обчислюється за допомогою інтегрування різниці на майбутній інтервал дискретності. За відомою між кривою вихідної напруги перетворювача та UГЛ та стану мережі визначають чергову синусоїду протиЕРС навантаження на вказаному інтервалі напруги мережі, що повинна підключатися до t навантаження в майбутньому інтервалі 1 дискретності. Визначають значення інтегралу від (3) Di a = e n - e g dt L різниці чергової синусоїди напруги мережі та UГЛ в 0 межах від поточного моменту до закінчення де L - індуктивність обмотки якоря, інтервалу дискретності. Вимірюють напругу еn - вихідна напруга перетворювача, тиристорного перетворювача та визначають eg - значення протиЕРС двигуна, що значення інтегралу від різниці UГЛ та напруги обчислюється з поточної швидкості двигуна, та тиристорного перетворювача в межах від початку при сталому режимі дорівнює інтервалу дискретності до поточного моменту (4) eg = W.C; ò( ) 5 27549 6 де С - конструктивний коефіцієнт двигуна. де Di - збільшення струму яке необхідно відробити Момент передбачальної комутації перетворювачу, щоб уникнути помилки за швидкістю при регулюванні, a 1 , на наступний (передбачальний кут керування æ d W ö d W 0 dW інтервал провідності перетворювача) Dç ; ÷= (9) dt dt обчислюється як арккосинус відношення різниці è dt ø поточного значення протиЕРС навантаження та dW 0 падіння напруги на активному опорі Ra ланцюга де dt - темп розгону, що є заданим, якоря двигуна, та постійній складовій випрямленої dW напруги перетворювача Ud0 dt - дійсний темп розгону двигуна. æE -i ×R ö (5) a1 = arccosç M SET a ÷, ÷ ç Дійсний темп розгону обчислюється на U d0 ø è підставі поточного значення швидкості обертання Ha Фіг.1 зображений електричний ланцюг валу двигуна та двох попередніх значень, що навантаження перетворювача, при цьому вимірюються мікропроцесором із частотою електродвигун постійного струму замінено його обчислювання моменту комутації тиристорів, за еквівалентною схемою. допомогою методу чисельного диференціювання: Фіг.2 є поясненням до процесів описаних dW 1 виразами 9-15. (1,5 × W n - 2 × Wn -1 + 0,5 × Wn -2 ); (10) = dt 2×t Фіг.3 містить структурну схему електромеханічної системи, яка здійснює де t - період обчислювань моменту комутації наведений спосіб керування. тиристорів, Пристрій за фіг.1 містить : 1 - мікропроцесор, 2 Wn - поточне значення швидкості обертання - датчик нуля лінійної напруги вхід якого валу двигуна, підключений до двох фаз мережі, а вихід - до Wn-1, та Wn-2 - значення швидкості на вдвох одного з входів переривань мікропроцесора 1, 3 попередніх моментах обчислювання. формувач імпульсів керування, 4 - трифазний На підставі аналізу виразів 8 та 9 можна мостовий керований випрямляч, 5 - датчик струму зробити висновок про те, що при потенційній навантаження, що вимірює струм якірного ланцюга можливості досягнення заданого струму за один двигуна 6, та отримане значення подає на вхід такт перетворювача, необхідний темп розгону АЦП 7,6двигун постійного струму двигуна також буде досягнуто за один такт. (навантаження), якірний ланцюг котрого живиться dW 0 від випрямляча 4, а порушення здійснюється з dt Заданий темп розгону напряму будь-якого іншого джерела постійного струму та залежить від помилки регулювання і може бути на схемі не вказано, 7 та 9 - аналого-цифрові врахований як: перетворювачі, 8 - таймер, 10 - датчик обертання валу двигуна, на виході якого видається сигнал dW 0 (11) = k × (W 0 - W ); постійної напруги пропорційний кутовий швидкості dt обертання валу двигуна 6. де Wo - кутова швидкість обертання валу Датчик нуля лінійної напруги 2 формує двигуна, що є заданою, імпульси синхронізації з появою яких k - коефіцієнт пропорційності. мікропроцесор 1 перезапускає таймер 8, який Отримане за виразом 8 збільшення струму здійснює відлік поточного кута керування повинно бути додане до поточного значення перетворювача. Датчик 5 вимірює струм якірного струму у навантаженні: ланцюга та за допомогою АЦП 7 результат (12) iSET. = iа + Di вводиться до мікропроцесору. Інформація про де iSET - значення струму навантаження швидкість обертання вводиться до мікропроцесору перетворювача, що є заданим на наступний такт за допомогою датчика 10 та АЦП 9. Виміряні перемикання тиристорів перетворювача. значення поточного струму іа якірного ланцюга та Враховуючі рівняння ланцюга навантаження швидкості обертання W напряму пов'язані з зображеного на фіг.2 різниця між поточним моментом на валу двигуна МM та величиною струмом якоря в момент коли відбулась чергова протиЕРС навантаження ЕM згідно з виразами 6 та комутація та струмом який буде досягнутий на 7. момент наступної комутації Dia, без урахування . (6) ЕМ = W С; активного опору обмотки якоря обчислюється за виразом 3. . МM = іа С; (7) Вихідна напруга перетворювача може бути де С - конструктивний коефіцієнт двигуна. визначена за виразом: Як відомо, процеси у електроприводі æ pö постійного струму описуються виразом 1. (13) en = Em cosç wt + a 0 - ÷ Якщо узяти диференціал за часом від виразу mø è 1, та від моменту на валу двигуна перейти до де Еm - амплітуда лінійної напруги мережі, струму якоря, то при переході від похідної до a 0 - поточний кут керування перетворювачем, кінцевих збільшень отримаємо вираз: m - пульсність, що для трифазного мостового J æ dW ö Di = × D ç (8) ÷; випрямляча дорівнює m = 6. C è dt ø 7 З урахуванням зображених на фіг.3: 27549 виразу t1 t1 0' 0' 13 та процесів æ pö æ pö E 1 1 Di a = Em cos ç wt + a 0 - ÷dt E g dt = m sin ç wt + a 0 - ÷ wL L mø L mø è è ò де t1 = ò a1 - a 0 + w a1 - a 0 + 2p m 0 Ed t1 L (14) 2p m - момент наступної комутації, під час якої a 1 - передбачуваний кут керування на наступний інтервал провідності, що обчислюється за виразом 5. 0' - момент поточної комутації. Після перетворення отримаємо: Di a = Em wL é æ pö æ p öù E m æ 2p ö ç a1 - a 0 + ÷, (15) êsinç a 1 + ÷ - sinç a 0 - ÷ ú mø m ø û wL è mø è ë è На підставі виразів 2 та 15 якщо прирівняти збільшення струмів, на кожному інтервалі комутації є можливим визначення моменту перемикання ключів. Чергова комутація повинна відбутися якщо (i SET - i a ) ³ Em wL é æ pö æ p öù E m æ 2p ö ç a1 - a 0 + ÷, (16) êsinç a 1 + ÷ - sinç a 0 - ÷ú mø m øû w L è mø è ë è при цьому iSET обчислюється за виразом 12 виходячи з різниць заданого та поточного темпів розгону. Рішення про видачу чергових імпульсів комутації приймається мікропроцесором 1 (Фіг.1) при обчислюванні виразу 16. При цьому, поточний a0 , кут керування перетворювачем відраховується від моменту попередньої комутації шляхом перерахунку часу, який пройшов від початку періоду мережі та який вимірюється таймером 8. Таким чином, наведений спосіб керування тиристорним перетворювачем дає можливість регулювати швидкість обертання валу двигуна із заданим темпом розгону, а також здійснює регулювання струму навантаження без явного інтегрування. При цьому необхідні тригонометричні обчислювання (вирази 5 та 16) обчислюються мікропроцесором шляхом розкладання необхідної функції в ряд. Джерела інформації 1. Шипилло В. П. Операторно-рекуррентный анализ электрических цепей и систем. - М.: Энергоатомиздат, 1991. - 312 с. 2. А. с. №1539934 СССР, МКИ Н 02 М 7/48. Способ управления тиристорным преобразователем / Серов Н. А., Чучалов В. А., Муселимян С. А. и др. 8
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for direct microprocessor control of rectifier according calculated forecasts
Автори англійськоюSokol Yevhenii Ivanovych, Kiiashko Borys Oleksandrovych, Domnin Ihor Feliksovych, Bakhnov Leonid Yevhenovych, Tymchenko Mykola Oleksandrovych, Ivanov Oleksandr Yevheniiovych
Назва патенту російськоюСпособ прямого микропроцессорного управления выпрямителем по вычисляемым прогнозам
Автори російськоюСокол Евгений Иванович, Кияшко Борис Александрович, Домнин Игорь Феликсович, Бахнов Леонид Евгеньевич, Тимченко Николай Александрович, Иванов Александр Евгеньевич
МПК / Мітки
МПК: H02M 7/00
Мітки: керування, обчислювальними, прямого, прогнозами, мікропроцесорного, випрямлячем, спосіб
Код посилання
<a href="https://ua.patents.su/4-27549-sposib-pryamogo-mikroprocesornogo-keruvannya-vipryamlyachem-za-obchislyuvalnimi-prognozami.html" target="_blank" rel="follow" title="База патентів України">Спосіб прямого мікропроцесорного керування випрямлячем за обчислювальними прогнозами</a>
Спосіб прямого мікропроцесорного керування тиристорним випрямлячем та пристрій для його здійснення
Номер патенту: 48381
Опубліковано: 15.08.2002
Автори: Суботін Юрій Володимирович, Голубов Валерій Юрійович, Кипенський Андрій Володимирович, Сокол Євген Іванович
МПК: H02M 7/12
Мітки: пристрій, тиристорним, прямого, спосіб, керування, мікропроцесорного, випрямлячем, здійснення
Формула / Реферат:
1. Спосіб прямого мікропроцесорного керування тиристорним випрямлячем, що містить перетворення вихідного числа N, відповідного сигналу керування, за виразомF(N)=Nmax-N,де F(N) - результат перетворювання вихідного числа, одержаний виконанням операції віднімання;Nmax - число (постійна величина), яке при запису в таймер забезпечує формування максимального кута керування;N - вихідне число, відповідне сигналу...
Спосіб прямого мікропроцесорного керування тиристорним випрямлячем та пристрій для його здійснення
Номер патенту: 47623
Опубліковано: 15.07.2002
Автори: Кипенський Андрій Володимирович, Сокол Євген Іванович, Суботін Юрій Володимирович, Голубов Валерій Юрійович
МПК: H02M 7/12
Мітки: випрямлячем, керування, прямого, пристрій, спосіб, тиристорним, здійснення, мікропроцесорного
Формула / Реферат:
1. Спосіб прямого мікропроцесорного керування тиристорним випрямлячем, що містить перетворення вихідного числа N, відповідного сигналу керування, за виразомде F(N) - результат перетворювання вихідного числа, одержаний виконанням операції віднімання;Nmax - число (постійна величина), яке при записі у таймер забезпечує формування максимального кута...
Спосіб прямого мікропроцесорного керування тиристорним перетворювачем
Номер патенту: 68579
Опубліковано: 16.08.2004
Автори: Каліхевич Валерій Олександрович, Казьоннова Ніна Іванівна, Мороз Микола Георгійович, Кочергін Олександр Васильович
МПК: H02M 7/12
Мітки: мікропроцесорного, тиристорним, перетворювачем, спосіб, керування, прямого
Формула / Реферат:
Спосіб прямого мікропроцесорного керування тиристорним перетворювачем, що включає аналого-цифрове перетворення (АЦП) амплітуди напруги живильної мережі, визначення числа N, пропорційного часу відкривання тиристорів щодо моменту переходу живильної напруги через нуль, який відрізняється тим, що за допомогою АЦП вимірюють абсолютне значення амплітуди напруги живильної мережі, число N визначають відповідно до виразу
Спосіб прямого мікропроцесорного керування тиристорним перетворювачем та пристрій для його здійснення
Номер патенту: 6673
Опубліковано: 29.12.1994
Автори: Савченко Ігор Анатолійович, Долбня Віктор Тимофійович, Кипенський Андрій Володимирович, Сокіл Євген Іванович
МПК: H02M 7/12
Мітки: спосіб, перетворювачем, пристрій, керування, прямого, мікропроцесорного, здійснення, тиристорним
Формула / Реферат:
(57) 1. Способ прямого микропроцессорного управления тиристорным преобразователем, включающий запись в таймер числа N, отсчет этого числа путем уменьшения его на единицу с приходом каждого тактового импульса, начиная с момента перехода напряжения питающей сети через нуль, иформирование по окончании отсчета числа управляющих импульсов тиристорами, отличающийся тем, что частоту следования тактовых импульсов формируют пропорционально модулю...
Спосіб прямого мікропроцесорного керування напівпровідниковим перетворювачем електроенергії та пристрій для його здійснення
Номер патенту: 23060
Опубліковано: 30.06.1998
Автори: Рябенький Володимир Іванович, Поленов Олександр Миколаєвич, Сокіл Євген Іванович, Кипенський Андрій Володимирович
МПК: H02M 7/12
Мітки: перетворювачем, напівпровідниковим, електроенергії, керування, здійснення, прямого, пристрій, мікропроцесорного, спосіб
Формула / Реферат:
1. Способ прямого микропроцессорного управления полупроводниковым преобразователем электроэнергии, включающий преобразование исходного числа N, эквивалентного сигналу управления, в соответствии с выражениемF(N) = Nmax - N,где F(N) - результат преобразования исходного числа, полученный выполнением операции вычитания;-Nmax - значение числа (постоянная величина), которое при записи в таймер обеспечивает формирование...
Попередній патент: Пристрій компенсації ємнісної складової струму витоку на землю
Наступний патент: Спосіб стабілізації частоти інвертора струму з індуктивно-ємнісним навантаженням
Випадковий патент: Камера сухого гасіння коксу