Фазовий радіопеленгатор
Номер патенту: 78441
Опубліковано: 25.03.2013
Автори: Якорнов Євгеній Аркадійович, Матяш Олексій Юрійович, Ільченко Михайло Юхимович, Авдєєнко Гліб Леонідович, Василенко-Шереметьев Михайло Григорович
Формула / Реферат
Фазовий радіопеленгатор, що містить сім антен, встановлених на одній лінії, перпендикулярній осям симетрії їх характеристик направленості, з різницею довжин баз ![]() між першою і другою
між першою і другою ![]() , третьою і четвертою
, третьою і четвертою ![]() , що дорівнює
, що дорівнює ![]() , де
, де ![]() - середня довжина хвилі робочого діапазону пеленгатора,
- середня довжина хвилі робочого діапазону пеленгатора, ![]() - задана границя сектора однозначності визначення пеленга, довжина бази
- задана границя сектора однозначності визначення пеленга, довжина бази ![]() між другою та четвертою антенами визначається з умови
між другою та четвертою антенами визначається з умови ![]() , п'ята та шоста антени з базою між ними до
, п'ята та шоста антени з базою між ними до ![]() розміщені посередині бази
розміщені посередині бази ![]() , а сьома антена - на відстані до
, а сьома антена - на відстані до ![]() від третьої антени на базі
від третьої антени на базі ![]() , сім приймачів, що з'єднані по входах з виходами антен, блок демодуляції гармонічних сигналів, що включає в себе три суматори, три блоки віднімання, шість амплітудних детекторів та два фазових детектори, блок аналого-цифрових перетворювачів та мікропроцесор, причому вісім виходів блока демодуляції гармонічних сигналів є виходами амплітудних та фазових детекторів та з'єднані відповідно з входами восьми аналого-цифрових перетворювачів, виходи яких з'єднані відповідно з восьми входами мікропроцесора, перший вихід якого є виходом радіопеленгатора, який відрізняється тим, що додатково містить блок перетворення складних сигналів в гармонічні, включаючи в себе шість ідентичних каналів перетворення сигналу, у вигляді каскадно-з'єднаних першого змішувача частоти, підсилювача проміжної частоти, другого змішувача частоти та вузькосмугового фільтра, вимірювальний канал, у вигляді каскадно-з'єднаних першого змішувача частоти, підсилювача проміжної частоти, другого змішувача частоти та ще одного підсилювача проміжної частоти, опорний генератор, два гетеродини, два дільники потужності відповідно на шість та сім виходів, блок демодуляції гармонічних сигналів містить керований атенюатор і сьомий амплітудний детектор, також додано дев'ятий аналого-цифровий перетворювач, причому сім виходів приймачів, виконаних у вигляді підсилювачів високої частоти, з'єднані відповідно з входами семи каналів перетворення складних сигналів, які є першими входами перших змішувачів частоти, другі входи яких з'єднані відповідно з виходами першого дільника потужності, вхід якого з'єднаний з виходом першого гетеродина, два виходи опорного генератора підключено відповідно до входів гетеродинів, перший вихід другого гетеродина сполучено з другим входом другого змішувача частоти другого вимірювального каналу перетворення частоти, вихід якого з'єднаний зі входом восьмого підсилювача проміжної частоти, а його вихід - з входом другого дільника потужності, шість виходів якого з'єднані відповідно з другими входами других змішувачів частоти першого, другого, третього, п'ятого, шостого та сьомого каналів перетворення, виходи яких з'єднані з входами блока демодуляції гармонічних сигналів, перший вхід якого з'єднаний з першими входами першого суматора та першого блока віднімання, другі входи яких з'єднані з виходом керованого атенюатора, перші входи другого суматора та другого блока віднімання також з'єднані з виходом керованого атенюатора, а другі входи - з виходом шостого каналу перетворення, який також з'єднано з першими входами третього суматора та третього блока віднімання, другі входи яких з'єднані з виходом сьомого каналу перетворення, вхід керованого атенюатора з'єднано з другим виходом другого гетеродина, керований вхід атенюатора з'єднано з другим виходом мікропроцесора, вихід керованого атенюатора також сполучений з сьомим амплітудним детектором блока демодуляції гармонічних сигналів, вихід якого з'єднано з дев'ятим аналого-цифровим перетворювачем, а його вихід сполучений з дев'ятим входом мікропроцесора, виходи другого, третього, п'ятого та шостого каналів перетворення підключено відповідно до входів першого та другого фазових детекторів.
, сім приймачів, що з'єднані по входах з виходами антен, блок демодуляції гармонічних сигналів, що включає в себе три суматори, три блоки віднімання, шість амплітудних детекторів та два фазових детектори, блок аналого-цифрових перетворювачів та мікропроцесор, причому вісім виходів блока демодуляції гармонічних сигналів є виходами амплітудних та фазових детекторів та з'єднані відповідно з входами восьми аналого-цифрових перетворювачів, виходи яких з'єднані відповідно з восьми входами мікропроцесора, перший вихід якого є виходом радіопеленгатора, який відрізняється тим, що додатково містить блок перетворення складних сигналів в гармонічні, включаючи в себе шість ідентичних каналів перетворення сигналу, у вигляді каскадно-з'єднаних першого змішувача частоти, підсилювача проміжної частоти, другого змішувача частоти та вузькосмугового фільтра, вимірювальний канал, у вигляді каскадно-з'єднаних першого змішувача частоти, підсилювача проміжної частоти, другого змішувача частоти та ще одного підсилювача проміжної частоти, опорний генератор, два гетеродини, два дільники потужності відповідно на шість та сім виходів, блок демодуляції гармонічних сигналів містить керований атенюатор і сьомий амплітудний детектор, також додано дев'ятий аналого-цифровий перетворювач, причому сім виходів приймачів, виконаних у вигляді підсилювачів високої частоти, з'єднані відповідно з входами семи каналів перетворення складних сигналів, які є першими входами перших змішувачів частоти, другі входи яких з'єднані відповідно з виходами першого дільника потужності, вхід якого з'єднаний з виходом першого гетеродина, два виходи опорного генератора підключено відповідно до входів гетеродинів, перший вихід другого гетеродина сполучено з другим входом другого змішувача частоти другого вимірювального каналу перетворення частоти, вихід якого з'єднаний зі входом восьмого підсилювача проміжної частоти, а його вихід - з входом другого дільника потужності, шість виходів якого з'єднані відповідно з другими входами других змішувачів частоти першого, другого, третього, п'ятого, шостого та сьомого каналів перетворення, виходи яких з'єднані з входами блока демодуляції гармонічних сигналів, перший вхід якого з'єднаний з першими входами першого суматора та першого блока віднімання, другі входи яких з'єднані з виходом керованого атенюатора, перші входи другого суматора та другого блока віднімання також з'єднані з виходом керованого атенюатора, а другі входи - з виходом шостого каналу перетворення, який також з'єднано з першими входами третього суматора та третього блока віднімання, другі входи яких з'єднані з виходом сьомого каналу перетворення, вхід керованого атенюатора з'єднано з другим виходом другого гетеродина, керований вхід атенюатора з'єднано з другим виходом мікропроцесора, вихід керованого атенюатора також сполучений з сьомим амплітудним детектором блока демодуляції гармонічних сигналів, вихід якого з'єднано з дев'ятим аналого-цифровим перетворювачем, а його вихід сполучений з дев'ятим входом мікропроцесора, виходи другого, третього, п'ятого та шостого каналів перетворення підключено відповідно до входів першого та другого фазових детекторів.
Текст
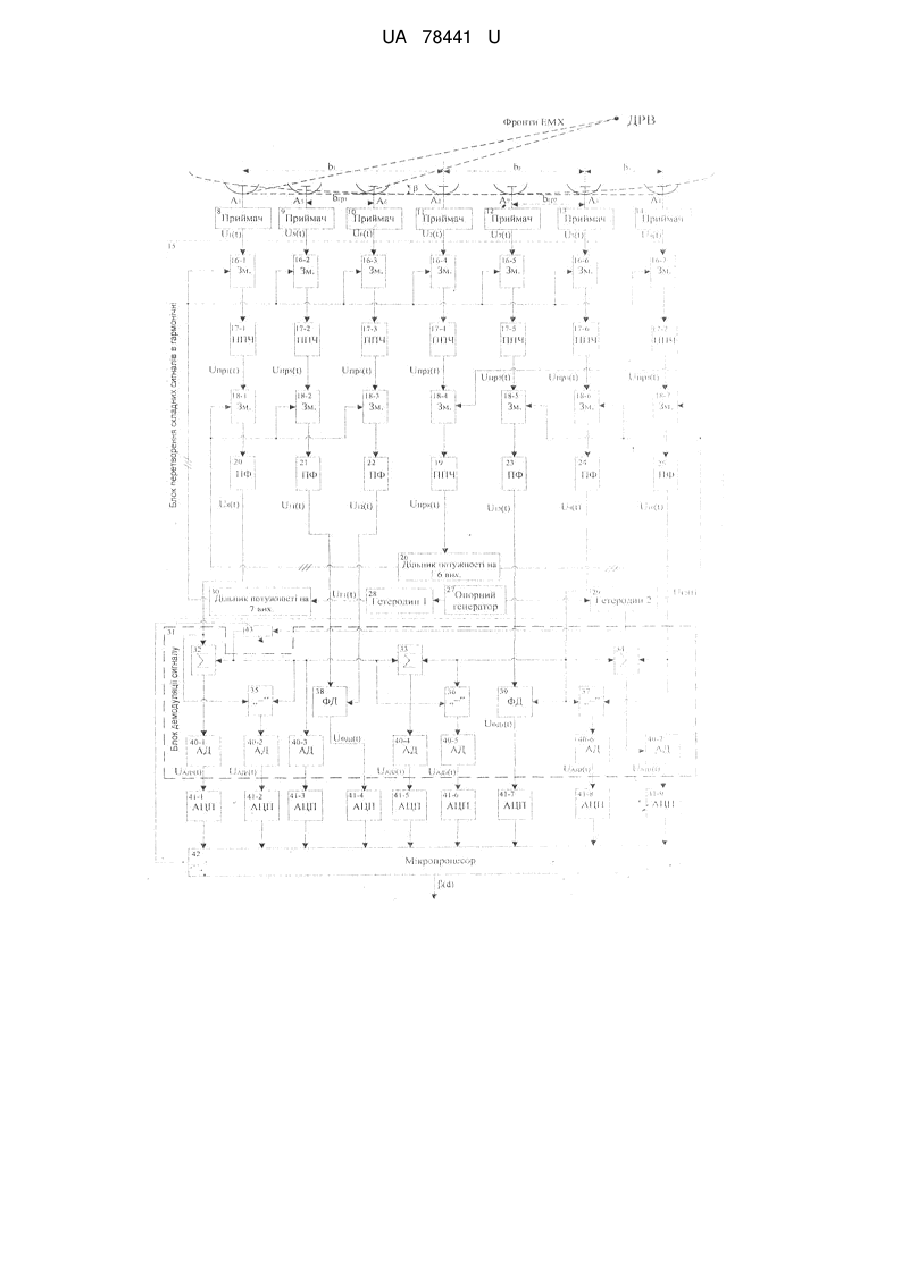
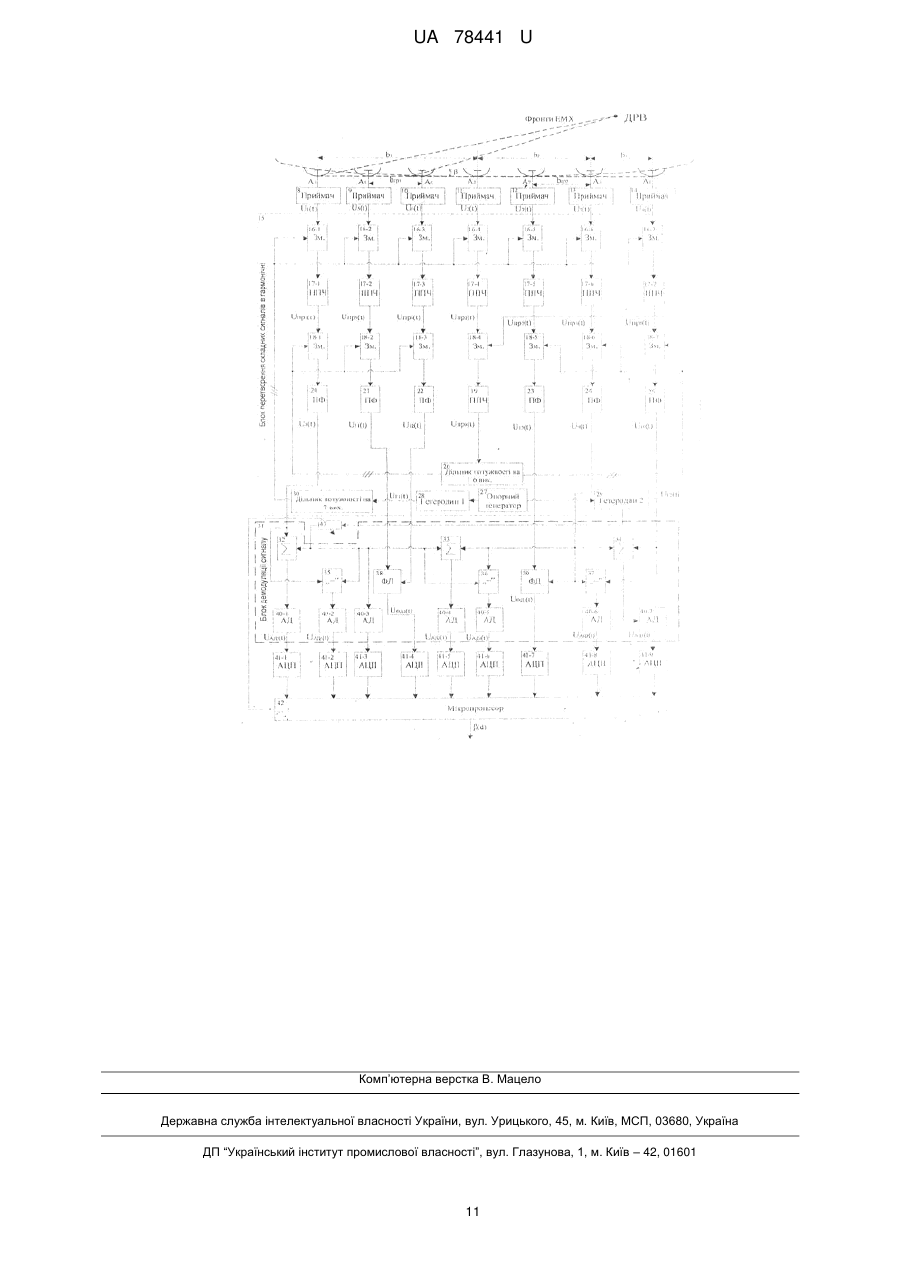
Реферат: Фазовий радіопеленгатор містить сім антен, бази, сім приймачів, блок демодуляції гармонічних сигналів, блок перетворення складних сигналів в гармонічні, опорний генератор, два гетеродини, два дільники потужності. UA 78441 U (54) ФАЗОВИЙ РАДІОПЕЛЕНГАТОР UA 78441 U UA 78441 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до радіотехніки і може бути використана для визначення пеленга джерела складного радіосигналу, наприклад з фазовою маніпуляцією. Відомий [1(с. 300, 301)] фазовий радіопеленгатор (ФРП), що включає в себе три антени, три приймачі і два фазометри, причому кожний з фазометрів виконаний на основі фазового детектора (ФД) та фазообертача на 90°. У такому варіанті входами відповідного фазометра є перший вхід ФД і вхід фазообертача, а вихід фазообертача приєднаний до другого входу ФД. Через близьке розташування кількох антен в вказаному пеленгаторі збільшується взаємний влив антен, характеристики котрих погіршуються, зокрема спотворюються діаграми направленості та зменшуються вхідні опори антен. Ці недоліки усунені в патенті Російської Федерації [2], у якому при рознесені антен на відстань, яка суттєво перевищує робочу довжину хвилі, область однозначного вимірювання кута приходу площин електромагнітної хвилі (ЕМХ) знаходиться в межах -/2 - /2 за рахунок використання не довжин баз, а різниці цих довжин. Для цього в ФРП, що містить в собі три антени, три ідентичних приймачі, два фазометри, кожний з яких складається з ФД та фазообертача на 90°, введені два додаткових ФД та блок логічної обробки сигналів. Основними недоліками даного аналога є помилки виміру пеленга, які пов'язані з дрейфом характеристик фазообертачів і невизначеності при виявленні джерела радіовипромінювання (ДРВ) із-за тангенсної пеленгаційної характеристики (ПХ). Вказані недоліки усунені в патенті Російської Федерації [3] за рахунок введення додаткового четвертого антенно-приймального каналу і формування у блоці логічної обробки сигналів замість тангенсної, синусної та косинусної ПХ. Однак при збільшенні розмірів баз в [2, 3] зростають помилки вимірювання пеленга, оскільки фронт ЕМХ неможливо вважати локально плоским та необхідно враховувати його кривизну (сферичність). Цей недолік усунений в деклараційному патенті на корисну модель [4], виконаному на основі [2], шляхом введення двох однозначних баз [1] симетрично центральній антені. Однак, питання оптимальною розміщення баз, особливо для визначення відстані по кривизні фронту ЕМХ, в [4] не розглядалося. Також не розглядалось питання усунення помилок пеленгації із-за тангенсної ПХ [2]. Найбільш близьким по технічній суті до запропонованого ФРП є патент [5]. Відомий ФРП, вибраний як найближчий аналог містить: сім антен, встановлених на одній лінії, перпендикулярній осям симетрії їх характеристик направленості, з різницею довжин баз (b1-b3) між першою і другою антенами (база b1), третьою і четвертою антенами (база b3), що дорівнює , де λ - середня довжина хвилі робочого діапазону пеленгатора, β 0 - задана b 2 sin 0 границя сектора однозначності визначення пеленга, довжина бази b2 між другою та четвертою b b3 антенами визначається з умови b 2 1 , п'ята та шоста антени і базою між ними до λ/2 2 розміщені посередині бази b1, а сьома антена - на відстані до λ/2 від третьої антени на базі b2, сім приймачів, що з'єднані по входах з виходами антен, блок демодуляції гармонічних сигналів (БДГС), що включає в себе три суматори, три блоки віднімання, шість амплітудних детекторів (АД) та два ФД, блок аналого-цифрових перетворювачів (АЦП) та мікропроцесор, причому вісім виходів БДГС є виходами амплітудних та ФД та з'єднані відповідно з входами восьми АЦП, виходи яких з'єднані відповідно з вісьма входами мікропроцесора, перший вихід якого є виходом радіопеленгатора. Основним недоліком наведеного найближчого аналогу є пеленгація джерела тільки безперервного гармонічного сигналу, тобто не передбачається обробка будь-яких складних сигналів, а також не враховується нестабільність несучої частоти другого гетеродина прийомного тракту ФРП. В основу корисної моделі поставлена задача обробки прийнятого складного радіосигналу, в першу чергу фазоманіпульованого (ФМн), на основі способу, запропонованого в [6], для забезпечення визначення пеленгу та відстані від ФРП до ДРВ при наявності кривизни фронту ЕМХ в зоні Френеля. Поставлена задача вирішується тим, що в ФРП, який містить: сім антен, встановлених на одній лінії, перпендикулярній осям симетрії їх характеристик направленості, з різницею довжин баз (b1-b3) між першою і другою антенами (база b1), третьою і четвертою антенами (база b3), що дорівнює b , де λ - середня довжина хвилі робочого діапазону пеленгатора, β0 2 sin 0 задана границя сектора однозначності визначення пеленга, довжина бази b2 між другою і 1 UA 78441 U b1 b 3 , п'ята та шоста антени з базою між ними 2 до λ/2 розміщені посередині бази b1, а сьома антена - на відстані до λ/2 від третьої антени на базі b2, сім приймачів, що з'єднанні по входах з виходами антен, БДГС, що включає в себе три суматори, три блоки віднімання, шість АД та два ФД, блок АЦП та мікропроцесор, причому вісім виходів БДГС є виходами (АД) та ФД, що з'єднані відповідно з входами восьми АЦП, виходи яких з'єднані відповідно з вісьма входами мікропроцесора, перший вихід якою є виходом радіопеленгатора, в який також додатково введені блок перетворення складних сигналів (БПСС) в гармонічні, включаючи в себе шість ідентичних каналів перетворення сигналу, у вигляді каскадно-з'єднаних першого змішувача частоти (ЗмЧ), підсилювача проміжної частоти (ППЧ), другого ЗмЧ та вузькосмугового фільтра (ПФ), вимірювальний канал, у вигляді каскадноз'єднаних першого ЗмЧ, ППЧ, другого ЗмЧ та ще одного ППЧ, опорний генератор, два гетеродини, два дільники потужності відповідно на шість та сім виходів, в БГДС введені керований атенюатор і сьомий АД, також додано дев'ятий АЦП, причому сім виходів приймачів, виконаних у вигляді підсилювачів високої частоти (ПВЧ), з'єднані відповідно з входами семи каналів перетворення складних сигналів, які є першими входами перших ЗмЧ, другі входи яких з'єднані відповідно з виходами першого дільника потужності, вхід якого з'єднаний з виходом першого гетеродина, два виходи опорного генератора підключено відповідно до входів гетеродинів, перший вихід другого гетеродина сполучено з другим входом другого ЗмЧ другого вимірювального каналу перетворення частоти, вихід якого з'єднаний зі входом восьмого ППЧ, а його вихід - з входом другого дільника потужності, шість виходів якого з'єднані відповідно з другими входами других ЗмЧ першого, четвертого, третього, п'ятого, шостого та сьомого каналів перетворення, виходи яких з'єднані з входами БДГС, перший вхід якого з'єднаний з першими входами першого суматора та першого блока віднімання, другі входи яких з'єднані з виходом керованого атенюатора, перші входи другого суматора та другого блока віднімання також з'єднані з виходом керованого атенюатора, а другі входи - з виходом шостого каналу перетворення, який також з'єднано з першими входами третього суматора та третього блока віднімання, другі входи яких з'єднані з виходом сьомого каналу перетворення, вхід керованого атенюатора з'єднано з другим виходом другого гетеродина, керований вхід атенюатора з'єднано з другим виходом мікропроцесора, вихід керованого атенюатора також сполучені з сьомим ЛД БДГС, вихід якого з'єднано з дев'ятим АЦП, а його вихід сполучений з дев'ятим входом мікропроцесора, виходи другого, третього, п'ятого та шостого каналів перетворення підключено відповідно до входів першого та другого ФД. На кресленні наведена структурна схема ФРП. Забезпечення визначення пеленгу та відстані від ФРП до ДРВ з фазоманіпульованим сигналом при наявності кривизни фронту БМХ в зоні Френеля в заявленому ФРП забезпечується за рахунок введення процедури перетворення складних сигналів в гармонічні та зміною алгоритму обробки приймальних пеленгатором сигналів в мікропроцесорі. Фазовий радіопеленгатор (креслення) містить: сім антен 1, 2, 3, 4, 5, 6, 7 встановлені на одній лінії, перпендикулярній осям симетрії їх характеристик направленості (лінійна розріджена антенна решітка (АР)) і на відстанях b1, b2 та b3 (базах) з різницею довжин баз (b1-b3), рівній , де λ середня довжина хвилі робочого діапазону пеленгатора, β0 - задана границя b 2 sin 0 сектора однозначності вимірювання пеленга джерела радіовипромінювання, довжина бази b2 b b3 визначається з умови b 2 1 ; три антени 5, 6, 7 з розмірами баз bгр, до λ/2 між їх ΦЦ для 2 забезпечення однозначності вимірів, що розташовані посередині бази b1 для антен A5, А6, а антена А7 розташована на відстані до λ/2 від А3 на базі b2; сім ідентичних приймачів (ПВЧ) 8-14; БПСС в гармонічні 15, який містить: шість ідентичних каналів перетворення сигналу і вимірювальний канал у складі семи перших ЗмЧ 16-1 - 16-7, семи ППЧ 17-1 - 17-7, які разом зі змішувачами утворюють перше перетворення частоти, семи других ЗмЧ 18-1 - 18-7, ППЧ 19, шість ПФ 20-25, шестиканальний та семиканальний дільники потужності 26 та 30 відповідно, опорний генератор 27 і два гетеродини 28-29; БДГС 31, що містить: три суматори 32-34, три блоки віднімання 35-37 та два ФД 38. 39, сім АД 40-1 - 40-7; дев'ять АЦП 41-1 - 41-9, мікропроцесор 42 та керований атенюатор 43. Причому виходи антен А1-А7 підключені до входів відповідних ПВЧ 8-14, а вони, в свою чергу, підключаються до БПСС в гармонічні 15, в якому відповідно підключені до перших входів змішувачів 16-1 - 16-7, другі входи яких з'єднані з виходами семиканального дільника потужності 30, вхід якого з'єднаний з виходом першого гетеродина 28; виходи ЗмЧ 16-1 16-7 відповідно з'єднані з входами підсилювачів ППЧ 17-1 - 17 третьою антенами визначається з умови b 2 5 10 15 20 25 30 35 40 45 50 55 2 UA 78441 U 5 10 15 20 7, а виходи підсилювачів 17-1 - 17-3 та 17-5 - 17-7 підключено до перших входів ЗмЧ 18-1 - 18-3 та 18-5 - 18-7, другі входи яких з'єднані з виходами шестиканального дільника потужності 26, вхід якою з'єднаний з виходом ППЧ 19, вихід ППЧ 17-4 сполучено з першим входом ЗмЧ 18-4, другий вхід якого з'єднаний з першим виходом другого гетеродина 29, а вихід - з входом ППЧ 19; виходи ЗмЧ 18-1 - 18-3 та 18-5 - 18-7 відповідно сполучено з входами ПФ 20-25; виходи всіх ПФ підключено до входів БДГС 31 і далі ПФ 21, 22 підключено до входів ФД 38, вихід якого, в свою чергу, сполучено з входом АЦП 41-4; вихід ПФ 23 сполучено з першим входом ФД 39, вихід якого сполучено з входом АЦП 41-7; вихід ПФ 24 сполучено з першим входом блока віднімання 37 та другими входом ФД 39 і суматора 34; вихід ПФ 25 сполучено з першим входом суматора 34 та другим входом блока віднімання 37, вихід якого сполучено з входом АД 40-6, а його вихід відповідно з входом АЦП 41-8; другі входи суматорів 33 та 34 підключено між собою та з входом блока віднімання 36, вихід якого сполучено з входом АД 40-5, вихід відповідно якого підключається до входу АЦП 41-6, вихід суматора 34 сполучено з входом АД 40-7, вихід якого сполучено з АЦП 41-9; вихід ПФ 20 сполучено з першими входами суматора 32 та блока віднімання 35, вихід суматора 32, в свою чергу, підключено до входу АД 40-1, вихід якого сполучено з входом АЦП 41-1; вихід суматора 33 підключено до входу АД 40-4, а його вихід до входу АЦП 41-5; вихід блока віднімання 35 підключено до входу АД 40-2, а його вихід до входу АЦП 41-2; виходи АЦП 41-1, 41-2 та 41-4 - 41-9 підключено до входу мікропроцесору 42, перший вихід якого є виходом радіопеленгатора, а другий з'єднано з керованим входом атенюатора 43, другий вхід якого підключено до другого виходу другого гетеродина 29, вихід атенюатора 43 сполучено з другими входами суматорів 32, 33, блока віднімання 36 та входом АД 40-3, вихід якого сполучено з АЦП 41-3, вихід якого також підключено до мікропроцесора 42. Радіопеленгатор працює таким чином. Антенами А1-А7 (креслення) приймаються складні радіосигнали, наприклад з ФМн та нестабільною несучою частотою передавача. 25 U1(t)=U1cos[(ωc±Δω)t+φk(t)+φ1]; U2(t)=U2cos[(ωc±Δω)t+φk(t)+φ2]; U3(t)=U3cos[(ωc±Δω)t+φk(t)+φ3]; U4(t)=U4cos[(ωc±Δω)t+φk(t)+φ4]; U5(t)=U5cos[(ωc±Δω)t+φk(t)+φ5]; U6(t)=U6cos[(ωc±Δω)t+φk(t)+φ6]; U7(t)=U7cos[(ωc±Δω)t+φk(t)+φ7]; 30 35 40 (1) де - U1… U7 - амплітуди ФМн сигналів на виходах відповідних ПВЧ 8-14; - ωc - несуча частота; - Δω - абсолютна нестабільність несучої частоти передавача; - φk(t) - закон зміни фази несучої в часі інформаційним сигналом; - φ1…φ7 - фази сигналів на виході приймачів з урахуванням набігу фази між відповідними антенними елементами. Підсилювані ПВЧ 8-14 сигнали (1) надходять, відповідно, на перші входи змішувачів 16-1-167 БПСС 15, на другі входи яких через семиканальний дільник потужності 30 подається напруга першого гетеродина 28. UГ1(t)=UГ1cos(ωГ1t±ΔωГ1+φГ1), (2) де UГ1, ωГ1, φГ1, ΔωГ1 – амплітуда, частота, початкова фаза і нестабільність частоти першого гетеродину. На виходах ЗмЧ 16-1 - 16-7 утворюються напруги комбінаційних частот. Резонансними ППЧ 17-1 - 17-7 підсилюються та виділяються напруги Uпр1(t) … Uпр7(t) першої проміжної частоти (ПЧ). Uпр1(t)=Uпр1cos[(ωпр1±Δω±ΔωГ1)t+φk(t)+φпр1]; Uпр2(t)=Uпр2cos[(ωпр1±Δω±ΔωГ1)t+φk(t)+φпр2]; Uпр3(t)=Uпр3cos[(ωпр1±Δω±ΔωГ1)t+φk(t)+φпр3]; Uпр4(t)=Uпр4cos[(ωпр1±Δω±ΔωГ1)t+φk(t)+φпр4]; Uпр5(t)=Uпр5cos[(ωпр1±Δω±ΔωГ1)t+φk(t)+φпр5]; Uпр6(t)=Uпр6cos[(ωпр1±Δω±ΔωГ1)t+φk(t)+φпр6]; Uпр7(t)=Uпр7cos[(ωпр1±Δω±ΔωГ1)t+φk(t)+φпр7]; (3) де 3 UA 78441 U 1 K 1U1UГ1, пр1 1 Г1 ; 2 1 K 1U2UГ1, пр2 2 Г1 ; 2 1 K 1U3UГ1, пр3 3 Г1 ; 2 1 K 1U 4UГ1, пр4 4 Г1 ; 2 1 K 1U5UГ1, пр5 5 Г1 ; 2 1 K 1U6UГ1, пр6 6 Г1; 2 1 K 1U7UГ1, пр7 7 Г1 ; 2 Uпр1 Uпр2 Uпр3 Uпр4 Uпр5 Uпр6 Uпр7 5 10 15 20 25 (4) - Uпр1 … Uпр7 – амплітуди сигналів на виході ЗмЧ, що є рівними між собою; - φпр1 … φпр7 - фази сигналів на виході ЗмЧ; - φГ1…φΓ7 - початкові фази першого, гетеродина 28, що є рівними між собою; - K1 – коефіцієнт передачі перших ЗмЧ 16-1 - 16-7; - ωпр1=ωс-ωГ1 – перша ПЧ, утворюючи тим самим один вимірювальний канал антени А2 та шість пеленгаційних. В вимірювальному каналі антени А2 напруга Uпр2 першої ПЧ з виходу ППЧ 17-4 надходить на перший вхід ЗмЧ 18-4, на другий вхід якого подається напруга другого гетеродина 29. UГ2(t)=UГ2cos(ωГ2t±ΔωГ2+φГ2), (5) де UГ2, ωГ2, φГ2, ΔωГ2 - амплітуда, частота, початкова фаза і нестабільність частоти другого гетеродина. Оскільки перший гетеродин 28 та другий гетеродин 29 формують свої частоти на основі сигналу бід одного опорного генератора, то можливо стверджувати, що: Δω г1=Δωг2.· На виході змішувача 18-4 утворюється напруга комбінаційних частот, ППЧ 19 виділяє напругу Uпр8 тільки другої ПЧ. Uпр8(t)=Uпр8cos[(ωпр2±Δω)t±(Δωг1+ΔωГ2)+φпр8], (6) де 1 Uпр8 K 1 UГ 2 Uпр2 ; 2 ωпр2=ωпр1-ωГ2 φпр8=φпр2-φГ2=φ2-φГ1-φГ2. Далі напругу (6) вимірювального каналу за допомогою ЗмЧ 18-1 - 18-3 та 18-5 - 18-7 і шестиканального дільника потужності 26 перемножують з напругами (3) Uпр1(t),…Uпр7 (t) пеленгаційних каналів. З отриманих напруг, шляхом використання вузькосмугових ПФ 20-25 в пеленгаційних каналах виділяються гармонічні коливання з несучою частотою ωΓ2 із збереженням фазових зсувів. U8(t)=U8cos[ωГ2t±ΔωГ2+φГ2+Δφ12]; U9(t)=U9cos[ωГ2t±ΔωГ2+φГ2+Δφ32]; U10(t)=U10cos[ωГ2t±ΔωГ2+φГ2+Δφ42]; U11(t)=U11cos[ωГ2t±ΔωГ2+φГ2+Δφ52]; U12(t)=U12cos[ωГ2t±ΔωГ2+φГ2+Δφ62]; U13(t)=U13cos[ωГ2t±ΔωГ2+φГ2+Δφ72]; (7) де 30 1 1 1 K 2Uпр1Uпр8 ; U9 K 2Uпр3Uпр8 ; U10 K 2Uпр4Uпр8 ; 2 2 2 1 1 1 U11 K 2Uпр5Uпр8 ; U12 K 2Uпр6Uпр8 ; U13 K 2Uпр7Uпр8 ; 2 2 2 U8 4 UA 78441 U 5 U8…U13 - амплітуди сигналів на виході других ЗмЧ 18-1 - 18-3 та 18-5 - 18-7, що є рівними між собою; - Δφ12…Δφ72 -· повні фазові зсуви на виході других ЗмЧ 18-1 - 18-3 та 18-5 - 18-7; - K2 – коефіцієнт передачі кожного другого ЗмЧ; Δφ12=φ1-φ2; Δφ32=φ3-φ2; Δφ42=φ4-φ2; Δφ52=φ5-φ2; Δφ62=φ6-φ2; Δφ72=φ7-φ2. - фазові зсуви між відповідними антенами. У випадку плоского фазового фронту ЕМХ, падаючої на лінійну розріджену АР Α1-Α7 з напрямку β (креслення), справедливі наступні співвідношення: 10 2 b1 sin ; 2 32 b 2 sin ]; 2 b 2 b 3 sin ; 42 2 b1 bгр1 52 sin ; 2 2 b1 bгр1 62 sin ; 2 2 b 2 b3 bгр2 72 sin . 2 12 15 20 (8) Враховуючи, щo амплітудні характеристики каналів ФРГ1 можна зробити ідентичними за допомогою ПВЧ і ППЧ, можна в виразах (7) вважати, що U8=U9=U10=U11=U12=U13=U0. Далі гармонічні коливання U8(t)-U13(t) надходять до БДГС 31, де як і в ФРП - найближчому аналозі [5] перетворюються в напруги, що несуть інформацію про пеленг (β) на ДРВ, а також відстань (d) до нього при наявності кривизни фронту ЕМХ та надходять після АЦП 41-1 - 41-9 в цифровому вигляді у мікропроцесор 42. В мікропроцесорі 42 на першому етапі також введена обов'язкова процедура перевірки приймальних сигналів на сферичність фронту ЕМХ, оскільки при знаходженні ДРВ в проміжній зоні (ПЗ) або зоні Френеля на відстанях від ФЦ розрідженої лінійної АР 2B 2 cos 2 , де В=b +b +b - максимальний габарит АР (креслення) за рахунок наявності 1 2 3 кривизни фронту виникає помилка визначення пеленга, що тим більша, чим ближче ДРВ до пеленгатора. Процедура перевірки також як і у [5] проводиться за допомогою співвідношення: d 25 12 42 b1 b 14 1 , b 2 b3 B (9) яке при плоскому хвильовому фронті від ДРВ ураховує відмінності в базах Δb. Також алгоритмічно здійснюється усунення неоднозначності фазових зсувів за допомогою співвідношень: 30 Δφ12=Δφ12вим + 2πk12, Δφ42=Δφ42вим+2πk42 35 (10) , (11) де Δφ12вим, Δφ42вим - фазові зсуви, що виміряні між антенами А1 і А2, А2 і A4 (тобто на базах b1 та b2+b3); k12, k24 - кількість періодів фази, що втрачені при вимірюванні, і які відповідно дорівнюють: k12 1 b1 65гр 12в им ; 2 bгр (12) 5 UA 78441 U k 42 5 1 b 2 b3 37гр 42в им bгр 2 (13) У виразах (12), (13) Δφ65гр, Δφ37гр - фазові зсуви, виміряні ФД 38. 39 по напругах U11, U12, U13, U9 в (7) за відповідними однозначними базами bгр=λ/2 (креслення), де · операція округлення до найближчого цілого значення. Визначення Δφ12вим та Δφ42вим виконується у мікропроцесорі 42 з напруг для косинусних та синусних ПХ, які відповідно також як і в пеленгаторі-прототипі для плоского фронту ВМХ знаходяться з виразів: b b 3 (14) F1C,2C FC sin 1 sin ; 2 FC F1C при U АД 4 U АД3 ; або FC F2C при U АД 4 U АД3 F1C 10 U АД6 U АД2 F2C U АД5 U АД1 U АД 4 U АД3 ; F1S U АД6 U АД2 ; F2S U АД5 U АД1 U АД 4 U АД3 FS F1S при U АД 4 U АД3 або FS F2S при U АД 4 U АД3 ; ; b UАД4 2U0 sin 2 sin ; b UАД6 2U0 sin 1 sin ; b UАД2 2U0 sin 3 sin ; b b UАД5 2U0 cos 1 sin ; U АД3 2U0 cos 2 sin ; b UАД1 2U0 cos 3 sin ; UАД1 - UАД6 - напруги на виходах АД 40-1, 40-2, 40-4 - 40-7. Звідки: U АД5 ; (17) 12в им 2arctg U АД 6 U АД 4 32в им 2arctg U АД3 ; (16) (18) U АД 2 ; 43в им 2arctg U АД1 (15) (19) 15 42вим 32вим 43вим ; або U АД2 U АД 4 42в им 4arctg U АД1 U АД3 20 (20) ; (21) Останнє обумовлене тим, що арктангенс - непарна функція, і з цього випливає, що вже на грубій базі можливо визначити "полярність" пеленга (позитивний чи негативний), що неможливо отримати з косинусних функцій UАД2, UАД4, UАД6. 6 UA 78441 U При цьому в алгоритмі, закладеному в мікропроцесорі 42 передбачається, що ПХ, яка має високу крутизну F1C,2C забезпечує хорошу точність вимірювання пеленга, а інша ПХ, яка в цей час має високий рівень F1C,2C дозволяє з великою ймовірністю визначити наявність або 5 відсутність ДРВ. Тобто для визначення пеленга та відстані до ДРВ потрібно отримати значення записаних вище напруг UАД1-UАД6 для чого і були введені суматори та блоки віднімання. 2Г 2 2Г 2 t Г 2 32 42 32 42 , (22) U10 t U9 t 2U0 cos cos 2 2 Після операції амплітудного детектування у АД 40-7 другий множник скорочується: 32 b 3 U АД1 2U0K АД cos 42 2U0K АД cos sin , 2 (23) 10 де KАД – коефіцієнт передачі амплітудного детектора. 42 32 U9 t U10 t 2U0 sinГ 2 Г 2 t Г 2 2 42 32 sin 2 . (24) Після амплітудного детектування у АД 40-6: 15 32 b 3 UАД2 2U0K АД sin 42 2U0K АД sin sin ; 2 UФД1 K ФДU0 cos37 ; (25) (26) де KФД - коефіцієнт передачі фазового детектора. UФД2 K ФДU0 cos56 . (27) 20 25 Отримання рівними амплітуди корисного сигналу і гетеродина 29 на входах суматорів 32 і 33 та блока віднімання 35 виконується за допомогою регульованого атенюатора 43, на який сигнали керування надходять з мікропроцесора 42 завдяки ланцюгу керування, який включає в собі також АД 40-3 і АЦП 41-3. Для цього сигнал гетеродина 29 надходить на блок АД 40-3, який детектує гармонійний сигнал гетеродина і виділяє його амплітуду, яка буде дорівнювати UАД3=kUГ2. Далі напруга UАД3 перетворюється в АЦП 41-3 в цифровий сигнал, що надходить у мікропроцесор 42. У мікропроцесорі 42 виконується операція порівняння за амплітудою сигналів 0,5 U2 1 U2 2 kU 0 АД АД та сигналу UАД3, тобто формується нев'язка наступного вигляду 0,5 U2 1 U2 2 U2 3 . Якщо ΔU=0, то UГ2=U0 то сигнал керування атенюатором не АД АД АД 30 формується, якщо ΔU>0 (що свідчить про те, що UГ2
ДивитисяДодаткова інформація
Назва патенту англійськоюPhase radio direction finder
Автори англійськоюAvdeenko Hlib Leonidovych, Ilchenko Mykhailo Yukhymovych, Vasilenko-Sheremetiev Mihail Heorgiyovich, Matiash Oleksii Yuriiovych, Yakornov Yevhenii Arkadiiovych
Назва патенту російськоюФазовый радиопеленгатор
Автори російськоюАвдеенко Глеб Леонидович, Ильченко Михаил Ефимович, Василенко-Шереметьев Михаил Георгиевич, Матяш Алексей Юрьевич, Якорнов Евгений Аркадиевич
МПК / Мітки
МПК: G01S 3/48
Мітки: радіопеленгатор, фазовий
Код посилання
<a href="https://ua.patents.su/13-78441-fazovijj-radiopelengator.html" target="_blank" rel="follow" title="База патентів України">Фазовий радіопеленгатор</a>
Фазовий радіопеленгатор
Номер патенту: 56430
Опубліковано: 10.01.2011
Автори: Карпенко Борис Олексійович, Ліпчевська Ірина Леонідівна, Якорнов Євгеній Аркадійович, Авдєєнко Гліб Леонідович, Сторубльов Олександр Іванович
Мітки: фазовий, радіопеленгатор
Формула / Реферат:
Фазовий радіопеленгатор, що містить: три антени, розташовані в одній площині по прямій лінії на відстанях (базах), мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, і з різницею довжин баз між ними, рівною , де - середня довжина хвилі робочого діапазону пеленгатора,
Фазовий радіопеленгатор
Номер патенту: 72448
Опубліковано: 27.08.2012
Автори: Карпенко Борис Олексеевич, Якорнов Євгеній Аркадійович, Гостєв Володимир Володимирович, Авдєєнко Гліб Леонідович, Мазуренко Олександр Вікторович
Мітки: фазовий, радіопеленгатор
Формула / Реферат:
Фазовий радіопеленгатор, що містить лінійну розріджену антенну решітку з чотирьох антен, розташованих в одній площині по прямій лінії з різницею довжин баз (), рівною , де - середня довжина хвилі робочого діапазону пеленгатора,
Широкосмуговий фазовий радіопеленгатор
Номер патенту: 64705
Опубліковано: 10.11.2011
Автори: Охріменко Ярослав Юрійович, Ліпчевська Інна Леонідівна, Якорнов Євгеній Аркадійович, Авдєєнко Гліб Леонідович, Ільченко Михайло Юхимович
МПК: G01S 3/00
Мітки: радіопеленгатор, широкосмуговий, фазовий
Формула / Реферат:
Широкосмуговий фазовий радіопеленгатор, що містить три антени, які розміщені в одній площині по прямій лінії на неоднозначних базах, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен та з різницею довжин баз між ними, рівною , де - середня довжина хвилі робочого діапазону...
Фазовий радіопеленгатор
Номер патенту: 57200
Опубліковано: 10.02.2011
Автори: Якорнов Євгеній Аркадійович, Ліпчевська Інна Леонідівна, Ільченко Михайло Юхимович, Авдєєнко Гліб Леонідович, Коломицев Максим Олександрович
МПК: G01S 3/00
Мітки: фазовий, радіопеленгатор
Формула / Реферат:
Фазовий радіопеленгатор що містить: три антени, розміщені в одній площині по прямій лінії на неоднозначних базах, мінімальна довжина яких обмежена допустимим рівнем взаємного впливу антен, та з різницею довжин баз між ними, рівною , де λ середня довжина хвилі робочого діапазону пеленгатора, α0 - задана границя сектора однозначності визначення пеленга; три...
Фазовий радіопеленгатор
Номер патенту: 67323
Опубліковано: 10.02.2012
Автори: Ліпчевськая Інна Леонідівна, Авдєєнко Гліб Леонідович, Якорнов Євгеній Аркадійович, Ільченко Михайло Юхимович, Буділовський Олександр Вікторович
МПК: G01S 3/48
Мітки: радіопеленгатор, фазовий
Формула / Реферат:
Фазовий радіопеленгатор, що містить чотири антени, розташовані в одній площині по прямій лінії з різницею довжин баз , що дорівнює , де - середня довжина хвилі робочого діапазону пеленгатора,
Попередній патент: Спосіб виробництва пшенично-житніх булочок “луганські” з добавкою гідролізату з молюсків
Наступний патент: Спосіб одержання біологічно активних речовин з лікарської рослинної сировини
Випадковий патент: Спосіб лікування вірусних кон'юнктивітів