Спосіб прямого мікропроцесорного керування тиристорним випрямлячем та пристрій для його здійснення
Номер патенту: 47623
Опубліковано: 15.07.2002
Автори: Голубов Валерій Юрійович, Суботін Юрій Володимирович, Кипенський Андрій Володимирович, Сокол Євген Іванович
Формула / Реферат
1. Спосіб прямого мікропроцесорного керування тиристорним випрямлячем, що містить перетворення вихідного числа N, відповідного сигналу керування, за виразом
![]()
де F(N) - результат перетворювання вихідного числа, одержаний виконанням операції віднімання;
Nmax - число (постійна величина), яке при записі у таймер забезпечує формування максимального кута керування;
N - вихідне число, відповідне сигналу керування, запис у таймер одержаного числа F(N), відлік цього числа, починаючи з моменту синхронізації з напругою живильної мережі, шляхом зменшення його на одиницю з приходом кожного з тактових імпульсів, частота проходження яких пропорційна модулю напруги живильної мережі, та формування за закінченням відліку числа F(N) імпульсів керування тиристорами, який відрізняється тим, що коефіцієнт пропорційності між частотою проходження тактових імпульсів та модулем напруги живильної мережі на інтервалі ![]() , розташованому у межах
, розташованому у межах
![]()
перевищує коефіцієнт пропорційності між частотою проходження тактових імпульсів та модулем напруги живильної мережі на інтервалі ![]() , розташованому у межах
, розташованому у межах
![]()
![]()
у К разів, де ![]() - кут управління тиристорами, відповідний межово-безперервному режиму роботи тиристорного випрямляча;
- кут управління тиристорами, відповідний межово-безперервному режиму роботи тиристорного випрямляча;
![]() - кутова частота напруги живильної мережі;
- кутова частота напруги живильної мережі;
ТП - період роботи тиристорного випрямляча.
2. Спосіб за п. 1, який відрізняється тим, що число К, яке визначає співвідношення коефіцієнта пропорційності між частотою проходження тактових імпульсів та модулем напруги живильної мережі на інтервалі ![]() до коефіцієнта пропорційності між частотою проходження тактових імпульсів та модулем напруги живильної мережі на інтервалі
до коефіцієнта пропорційності між частотою проходження тактових імпульсів та модулем напруги живильної мережі на інтервалі ![]() , визначається за виразом
, визначається за виразом
![]()
де ![]() - кут навантаження тиристорного випрямляча.
- кут навантаження тиристорного випрямляча.
3. Спосіб за пп. 1, 2, який відрізняється тим, що забезпечення заданих значень коефіцієнтів пропорційності між частотою проходження тактових імпульсів та модулем напруги живильної мережі на інтервалах ![]() та
та ![]() здійснюється шляхом збільшення коефіцієнта ділення вихідної частоти перетворювача модуль напруги - частота у К разів при переході з інтервала
здійснюється шляхом збільшення коефіцієнта ділення вихідної частоти перетворювача модуль напруги - частота у К разів при переході з інтервала ![]() на інтервал
на інтервал ![]() .
.
4. Спосіб за пп. 1, 2, 3, який відрізняється тим, що момент часу, розподіляючий інтервали ![]() та
та ![]() , визначається моментом закінчення відліку числа М, розпочатим у момент синхронізації з напругою живильної мережі та здійснюваним шляхом зменшення цього числа на одиницю з приходом кожного тактового імпульсу, при цьому значення числа М знаходиться за виразом
, визначається моментом закінчення відліку числа М, розпочатим у момент синхронізації з напругою живильної мережі та здійснюваним шляхом зменшення цього числа на одиницю з приходом кожного тактового імпульсу, при цьому значення числа М знаходиться за виразом
![]()
де Um - амплітуда напруги живильної мережі;
![]() - параметр перетворювача модуля напруги живильної мережі у частоту, що є вольтсекундною площиною вхідної напруги тиристорного випрямляча, віднесеною до половини періоду напруги живильної мережі, вплив якої на вхід перетворювача напруга - частота призводить до формування на його виході одного імпульсу.
- параметр перетворювача модуля напруги живильної мережі у частоту, що є вольтсекундною площиною вхідної напруги тиристорного випрямляча, віднесеною до половини періоду напруги живильної мережі, вплив якої на вхід перетворювача напруга - частота призводить до формування на його виході одного імпульсу.
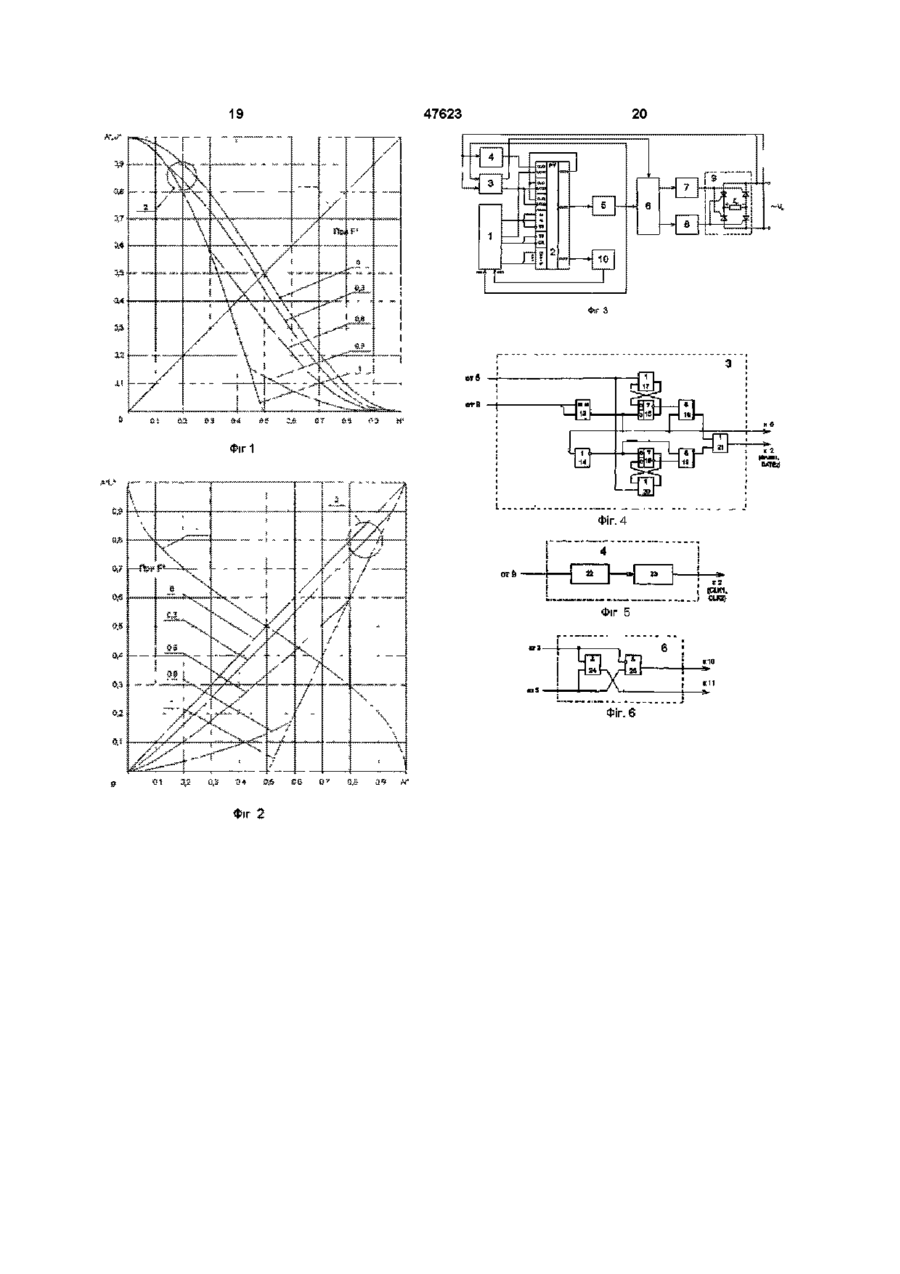
5. Пристрій для прямого мікропроцесорного керування тиристорним випрямлячем, що містить задатчик сигналів керування, виходами підключений до відповідних входів триканального таймера, вихід одного з каналів якого через перший формувач імпульсів підключений до входу імпульсів керування розподільника імпульсів, виходи першого та другого каналів керування якого підключені через вихідні підсилювачі до відповідних керуючих входів тиристорного випрямляча, блок зв'язку з мережею, входом закінчення підрахунку таймера підключений до виходу першого формувача імпульсів, а входом синхронізації з мережею, що визначає початок відліку, з'єднаний з виводами для підключення живильної мережі, вихід дозволу підрахунку блока зв'язку з мережею з'єднаний з керуючими входами використовуваних каналів таймера, а вихід вибору каналу керування - із входом вибору каналу керування розподільника імпульсів, функціональний перетворювач модуль напруги - частота імпульсів, вхід якого підключений до виводів для підключення живильної мережі, який відрізняється тим, що вихід перетворювача модуль напруги - частота імпульсів підключений до тактового входу іншого каналу таймера, керуючий вхід якого підключений до задатчика сигналів керування, а вихід - до тактових входів решти каналів таймера, керуючий вхід третього каналу таймера підключений до виходу дозволу підрахунку блока зв'язку з мережею, вихід першого формувача імпульсів підключений до першого входу запиту на переривання задатчика сигналів керування, до другого входу запиту на переривання якого через уведений формувач імпульсів підключений вихід третього каналу таймера.
Текст
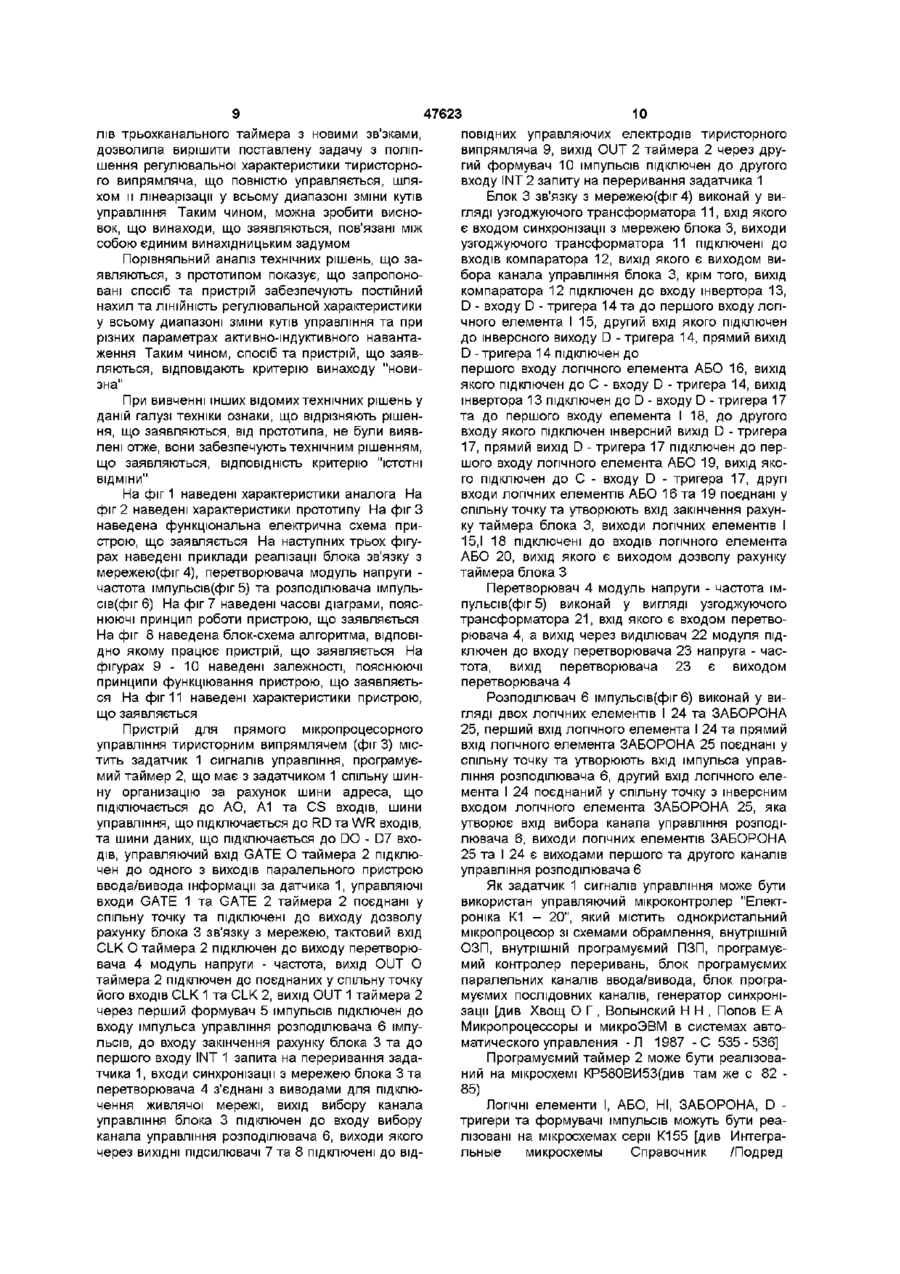
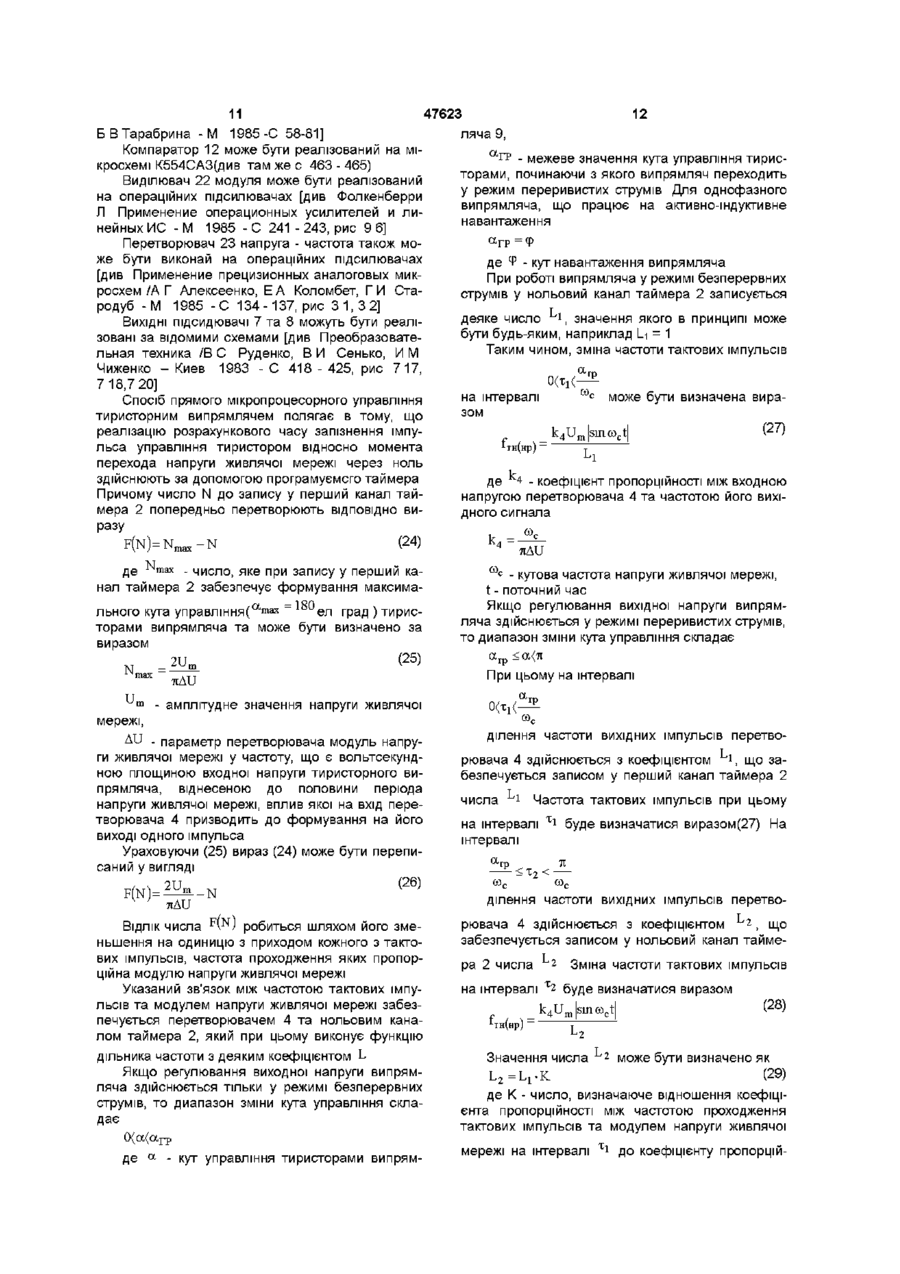
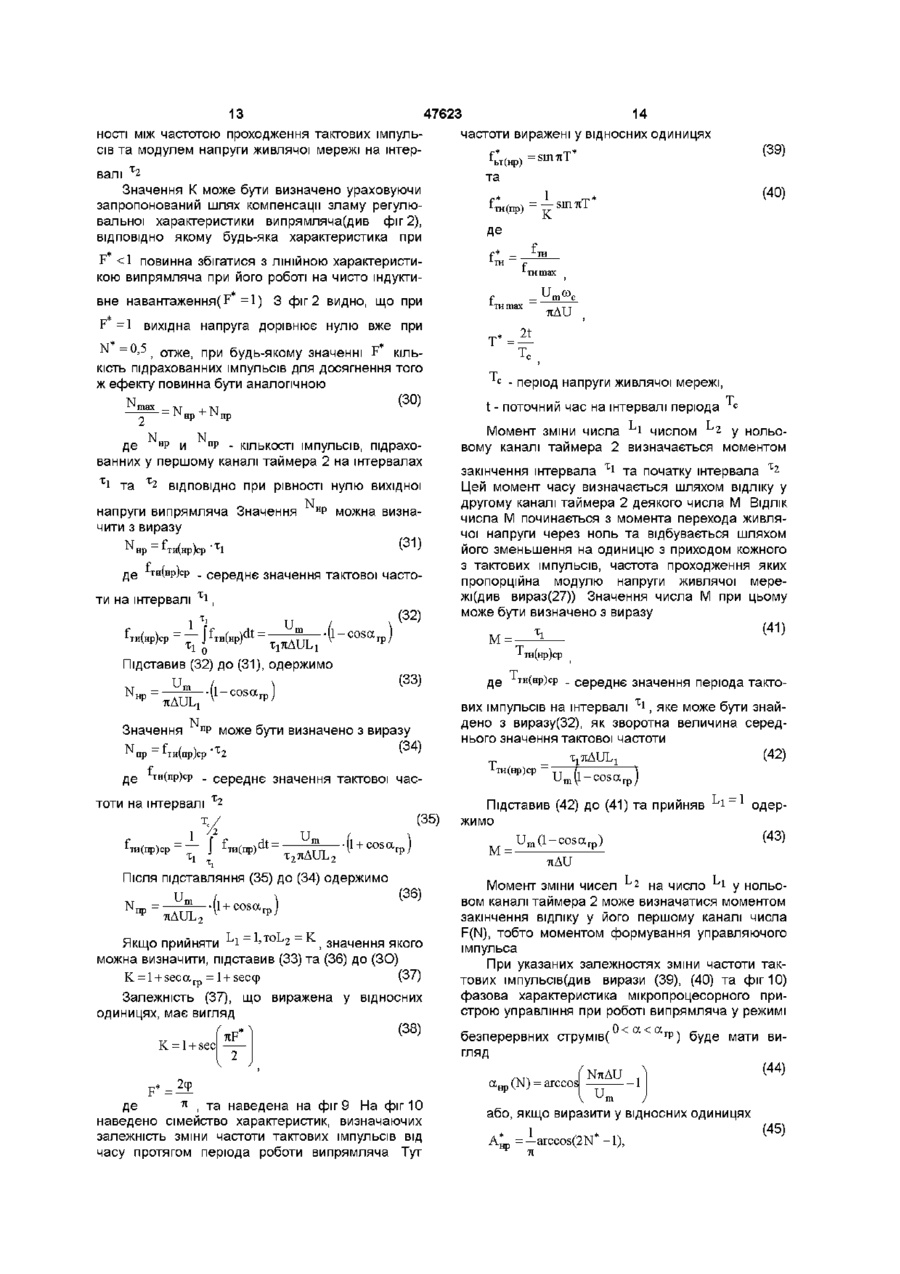
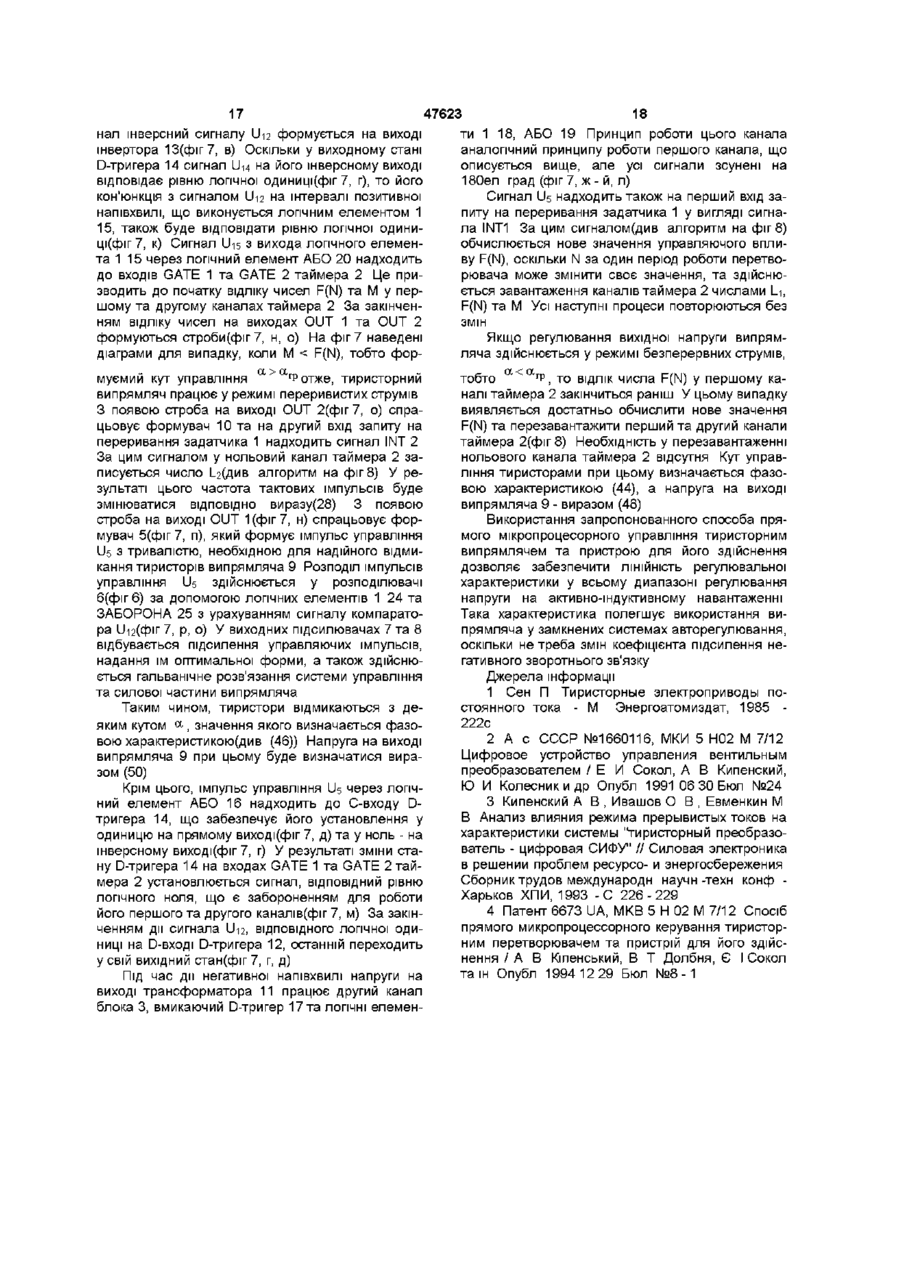
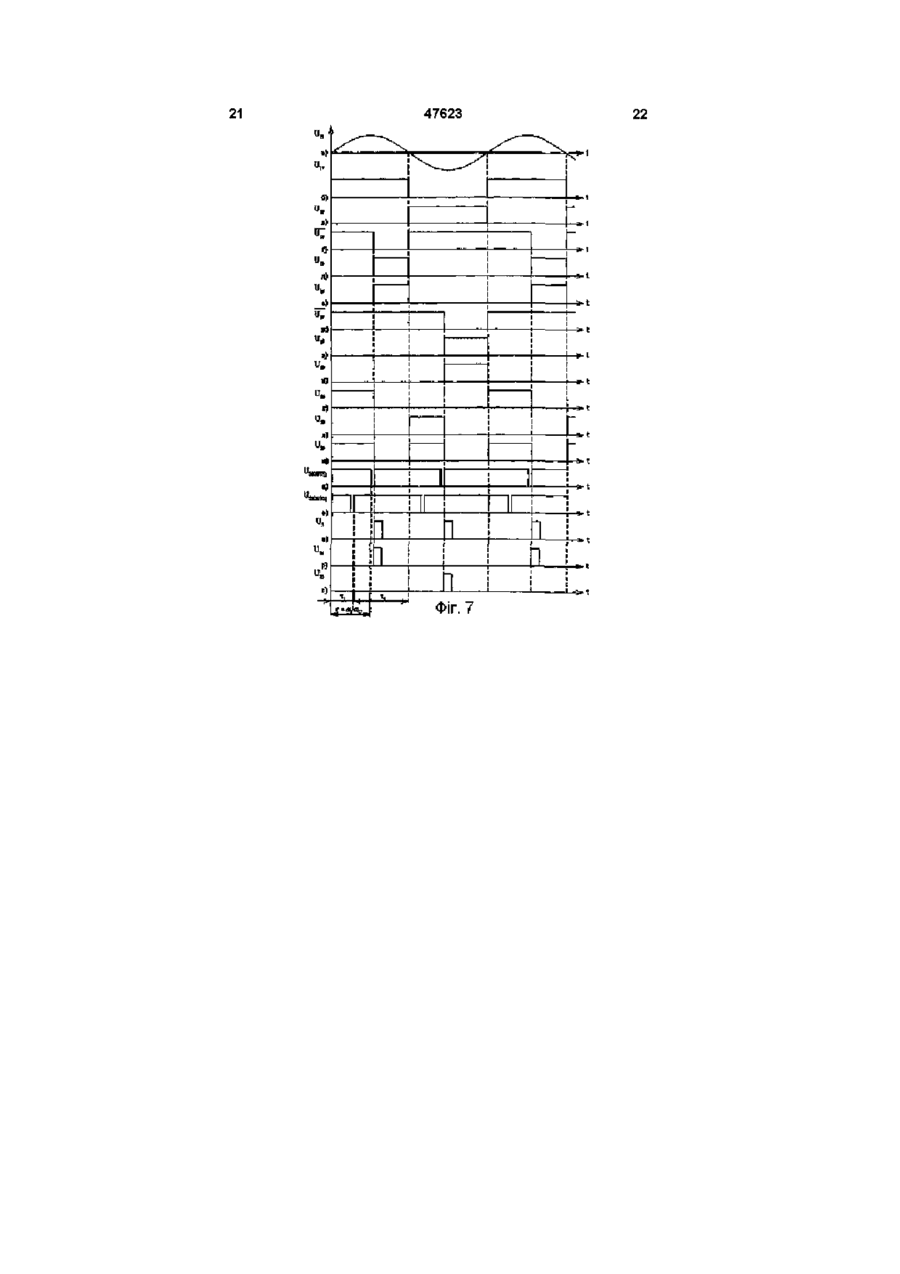
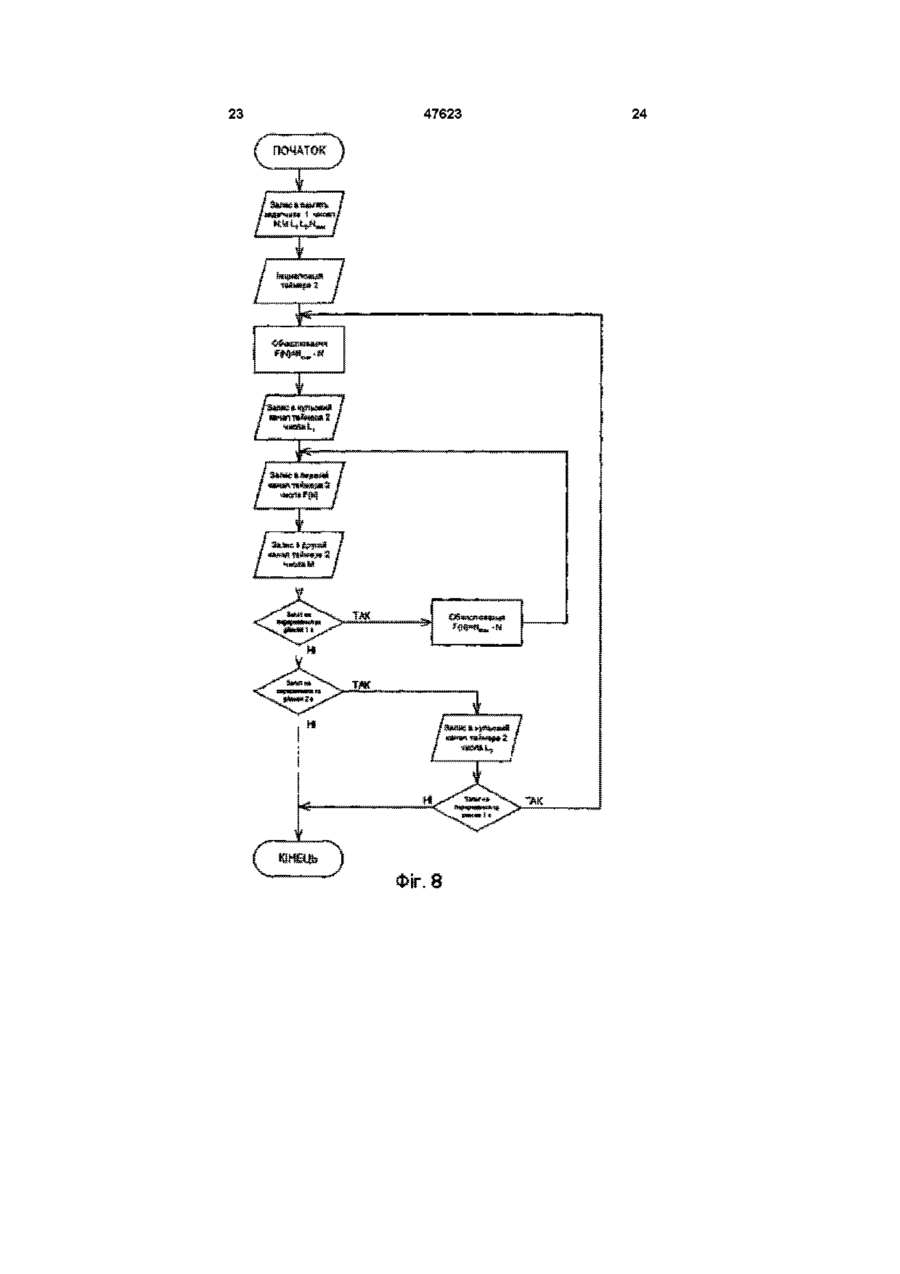
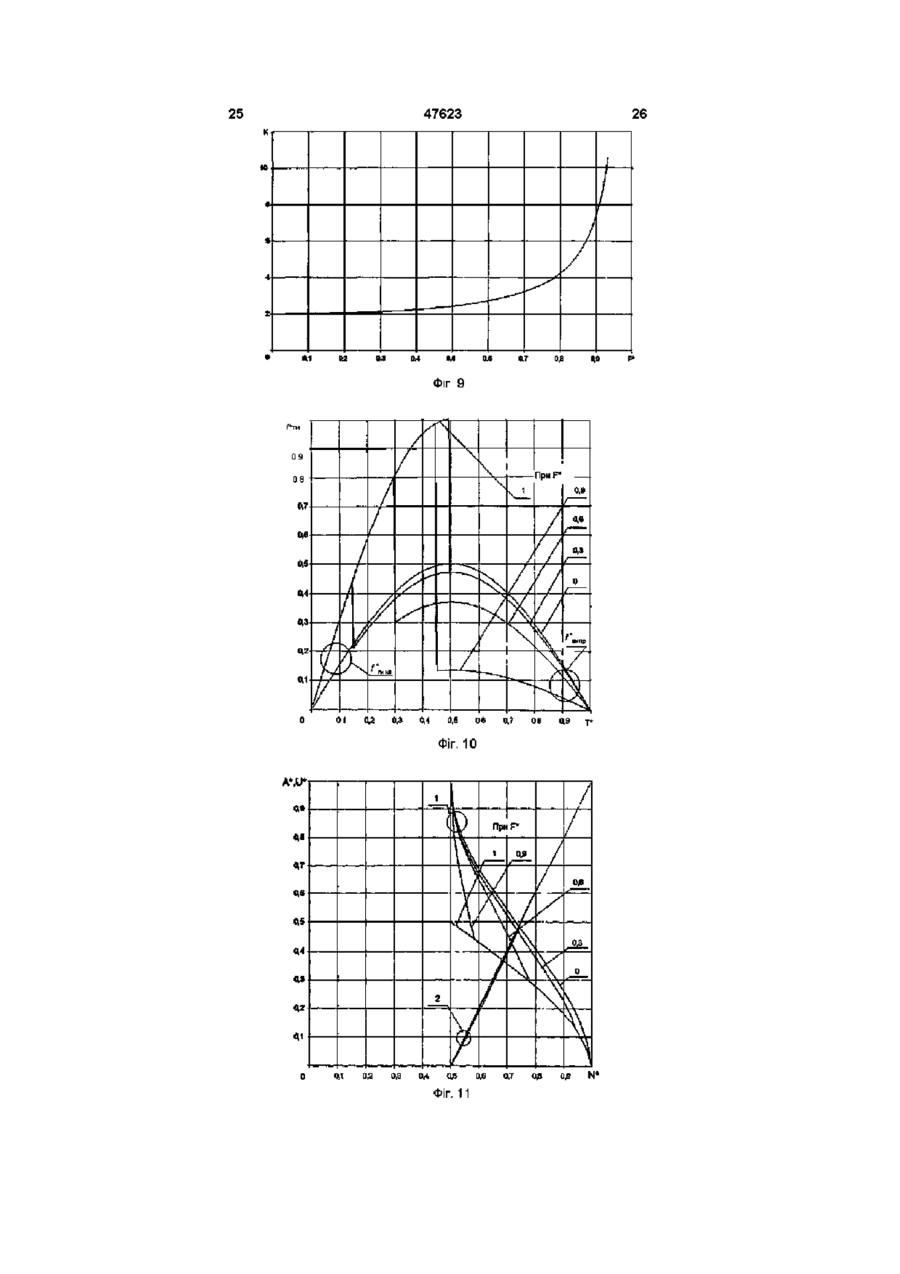
1 Спосіб прямого мікропроцесорного керування тиристорним випрямлячем, що містить перетворення вихідного числа N, ВІДПОВІДНОГО сигналу керування, за виразом F(N)=Nmax-N, де F(N) - результат перетворювання вихідного числа, одержаний виконанням операції віднімання, N m a x - число (постійна величина), яке при записі у таймер забезпечує формування максимального кута керування, N - вихідне число, відповідне сигналу керування, запис у таймер одержаного числа F(N), ВІДЛІК ЦЬОГО числа, починаючи з моменту синхронізації з напругою живильної мережі, шляхом зменшення його на одиницю з приходом кожного з тактових імпульсів, частота проходження яких пропорційна модулю напруги живильної мережі, та формування за закінченням відліку числа F(N) імпульсів керування тиристорами, який відрізняється тим, що коефіцієнт пропорційності між частотою проходження тактових імпульсів та модулем напруги живильної мережі на інтервалі у межах 0 < ті < Х1 , розташованому напруги живильної мережі на інтервалі Х 2 , розташованому у межах гр - кутова частота напруги живильної мережі, Тп - період роботи тиристорного випрямляча 2 Спосіб за п 1, який відрізняється тим, що число К, яке визначає співвідношення коефіцієнта пропорційності між частотою проходження тактових імпульсів та модулем напруги живильної мережі на інтервалі Х 1 до коефіцієнта пропорційності між частотою проходження тактових імпульсів та модулем напруги живильної мережі на інтервалі Х 2 , визначається за виразом К = 1 + sec ф, де Ф - кут навантаження тиристорного випрямляча 3 Спосіб за пп 1, 2, який відрізняється тим, що забезпечення заданих значень коефіцієнтів пропорційності між частотою проходження тактових імпульсів та модулем напруги живильної мережі на інтервалах Х 1 та Х 2 здійснюється шляхом збільшення коефіцієнта ділення вихідної частоти перетворювача модуль напруги - частота у К разів при переході з штервала Х 1 на інтервал Х 2 4 Спосіб за пп 1, 2, 3, який відрізняється тим, що момент часу, розподіляючий інтервали Х1 та Х 2 , визначається моментом закінчення відліку числа М, розпочатим у момент синхронізації з напругою живильної мережі та здійснюваним шляхом зменшення цього числа на одиницю з приходом кожного тактового імпульсу, при цьому значення числа М знаходиться за виразом , перевищує коефіцієнт пропорційності між частотою проходження тактових імпульсів та модулем а с < Х2 U dmax (10) *=-L 71 де У - кут провідності тиристора, значення а якого залежить від кута управління тиристором та кута навантаження Ф [3] Вирази (6) та (9) свідчать про нелінійність регулювальної характеристики та и залежність від кута навантаження Сказане вище підтверджує розрахунок регулювальної характеристики тиристорного випрямляча для різних значень кута навантаження, які наведені на фіг 1 (сімейство кривих 2) Тут кут навантаження Ф подан відносною величиною Фь t /і - кут, ВІДПОВІДНИЙ ЧИСТО індуктив ному навантаженню Вадою розглянутого способа, реалізованого цифровим пристроєм, є те, що він не забезпечує ЛІНІЙНОСТІ регулювальної характеристики тиристорного випрямляча Крім того, на межі безперервних струмів регулювальна характеристика перетерплює злам, що приводить до ще більшої нелінійності, а отже, і утруднює використання даного способу у замкнених системах авторегулювання, оскільки вимагає ускладнення алгоритма управління з метою корегування коефіцієнта посилення негативного зворотнього зв'язку Найбільш близьким технічним рішенням є обраний як прототип спосіб прямого мікропроцесорного управління тиристорним перетворювачем [4] ВІДПОВІДНО цьому способу у ПТ здійснюють запис деякого числа і, починаючи з момента перехода напруги живлячої мережі через ноль, роблять ВІДЛІК цього числа шляхом зменьшення його на одиницю з приходом кожного з тактових імпульсів, частота проходження яких пропорційна модулю напруги живлячої мережі За закінченням відліку числа роблять формування управляючих імпульсів тиристорами Причому число до запису до ПТ перетворюють ВІДПОВІДНО виразу F(H)=Nmas2-N2] (11) ДЄ N m a X 2 - МЭКСИМЭЛЬНе ЗНЗЧЄННЯ ЧИСЛЭ N М N max2 ~ або у відносних одиницях 2 U m ( 1 2 ) AU . параметр функціонального перетворювача, забезпечуючого зміну частоти тактових імпульсів пропорційно модулю напруги живлячої мережі Відомий пристрій, обраний як прототип, містить мікроЕОМ з ПТ, управляючий вхід якого підключен до першого виходу блока зв'язку з мережею, а вихід - через формувач імпульсів - до першого входу розподілювача імпульсів та до (14) А 2 =— arccos 2N 2 - I 7 1 тут N = Фь= л / де 6 першого входу блока зв'язку з мережею, другий вхід якого та вхід функціонального перетворювача призначені для підключення до шин напруги живлячої мережі, другий вихід блока зв'язку з мережею підключен до другого входу розподілювача імпульсів, вихід функціонального перетворювача підключен до тактовому входу ПТ, а виходи розподілювача імпульсів через ВИХІДНІ каскади підключені до управляючих електродів ВІДПОВІДНИХ тиристорів [4] Фазова характеристика ФЗП, реалізованного на ПТ, при такому способі управління буде мати вигляд (13) N 2 TIAU a-j(N)=arccos -1 Um (15) (16) N, Результати розрахунку даної фазової характеристики подані на фіг 2(крива 1) При роботі випрямляча, що повністю управляється, на активно-індуктивне навантаження середнє значення випрямленної напруги у режимі безперервних струмів буде визначатися виразом 'd2 HP Регулювальна характеристика у цьому випадку буде мати вигляд (18) и2І =2N;-I Де (19) и2P и 2 H ) dH P dmax и У режимі переривистих струмів середнє значення випрямленної напруги визначається виразом (20) и„ u — 1 — cos| arccosl — - 1 +У2 d2(m) = U, Регулювальна характеристика у цьому випадку буде мати вигляд и 2ПР Де и 2ПР) U dmax (22) Розрахунки регулювальної характеристики за виразами (18) та (21) наведені на фіг 2(сімейство кривих 2) Вадою відомого способа, реалізованого відомим пристроєм, є те, що при переході у режим переривистих струмів регулювальна характеристика змінює свій нахил, величина якого залежить 47623 8 від кута навантаження Така регулювальна харакмодулем напруги живлячої мережі на інтервалах теристика утруднює використання даного засоба у Хі Х і 2 здійснюється шляхом збільшення коефіцізамкнених системах авторегулювання єнта ділення виходної частоти перетворювача Задачею винаходу, що пропонується, є лінеамодуль напруги - частота у К разів при переході з різація регулювальної характеристики тиристорноХі %г го випрямляча, що повністю управляється, у всьоштервала на інтервал Момент часу, розпому диапазон і зміни кутів управління шляхом Хі %г діляючий інтервали та згідно способу, що корегування нахилу регулювальної характеристики заявляється, визначається моментом закінчення у режимі переривистих струмів та усунення и залежності від кута навантаження відліку числа М , початим у момент синхронізації з Задача, що ставиться, вирішується за допомонапругою живлячої мережі та здійснюючимся шлягою того, що у способі прямого мікропроцесорного хом зменьшення цього числа на одиницю з прихоуправління тиристорним випрямлячем, що містить дом кожного тактового імпульса При цьому знаперетворення вихідного числа N, ВІДПОВІДНОГО сигчення числа М визначається виразом налу управління, за виразом и т (і-созф) М= F(N)=Nmax-N] де F ( N ) - результат перетворення вихідного числа, одержаний виконанням операції віднімання, N max . число(постійна величина), яке при ззпису у таймер забезпечує формування максимального кута управління, запис у таймер числа F(N) ВІДЛІК цього числа, починаючи з момента синхронізації з напругою живлячої мережі, шляхом зменьшення його на одиницю з приходом кожного з тактових імпульсів, частота проходження яких пропорційна модулю напруги живлячої мережі, та формування за закінченням відліку числа управляючих імпульсів тиристорами, згідно з винаходом, коефіцієнт пропорційності між частотою проходження тактових імпульсів та модулем напруги живлячої мережі на інтервалі межах Хі , розташованому у перевищує коефіцієнт пропорційності між частотою проходження тактових імпульсів та модулем напруги живлячої мережі на інтервалі 12, розташованному у межах аГР а р у К разів, де г - кут управління тиристорами, що відповідає межово-безперервному режиму роботи тиристорного випрямляча, що повністю управляється(для однофазного випрямляча Юс т - кутова частота напруги живлячої мережі, п - період роботи тиристорного випрямляча, а значення К згідно з винаходом, що заявляється, визначається виразом K = l + seccp (23) де ф - кут активно-індуктивного навантаження випрямляча, що повністю управляється L Ф = arctg R L - індуктивність навантаження, R - опір навантаження Крім того, задача, що ставиться, вирішується за рахунок того, що згідно з винаходом забезпечення заданих значень коефіцієнтів пропорційності між частотою проходження тактових імпульсів та U, де амплітуда напруги живлячої мережі, AU . параметр перетворювача модуля напруги живлячої мережі у частоту, що є вольтсекундною площиною вхідної напруги тиристорного випрямляча, віднесеною до половини перюда напруги живлячої мережі, вплив якої на вхід перетворювача напруга - частота призводить до формування на його виході одного імпульса Задача, що поставлена, вирішується також за допомогою того, що у пристрої для прямого мікропроцесорного управління тиристорним випрямлячем, що містить задатчик сигналів управління, виходами ПІДКЛЮЧЄННИЙ ДО ВІДПОВІДНИХ ВХОДІВ трьохканального таймера, вихід одного з каналів якого через перший формувач імпульсів підключен до входу імпульсів управління розподілювача імпульсів, виходи першого та другого каналів управління якого підключені через ВИХІДНІ підсилювачі до ВІДПОВІДНИХ управляючих входів тиристорного випрямляча, блок зв'язку з мережею, входом закінчення рахунку таймера підключен до виходу першого формувача імпульсів, а входом синхронізації з мережею, визначаючим початок відліку, з'єднаний з виводами для підключення живлячої мережі, вихід дозволу рахунку блока зв'язку з мережею з'єднаний з управляючим входом канала таймера, що використовується, а вихід вибору канала управління - зі входом вибору канала управління розподілювача імпульсів, функціональний перетворювач модуль напруги - частота імпульсів, вхід якого підключен до виводів для підключення живлячої мережі, а вихід, згідно винаходу, що пропонується, підключен до тактового входу іншого канала таймера, управляючий вхід якого підключен до задатчика сигналів управління, а вихід - до тактових входів решти каналів таймера, управляючий вхід третього канала таймера підключен до виходу дозволу рахунку блока зв'язку з мережею, вихід формувача імпульсів підключен до першого входу запиту на переривання задатчика сигналів управління, до другого входу запита на переривання якого через уведений формувач імпульсів підключен вихід третього канала таймера Зміна коефіцієнта пропорційності між частотою проходження тактових імпульсів та модулем напруги живлячої мережі при переході тиристорного випрямляча у режим переривистих струмів, забезпечена за рахунок використання вільних кана 47623 лів трьохканального таймера з новими звзками, дозволила вирішити поставлену задачу з поліпшення регулювальної хараісгеристики тиристорного випрямляча, що повністю управляється, шляхом и лінеарізацм у всьому диапазоні зміни кутів управління Таким чином, можна зробити висновок, що винаходи, що заявляються, пов'язані між собою єдиним винахідницьким задумом Порівняльний аналіз технічних рішень, що заявляються, з прототипом показує, що запропоновані спосіб та пристрій забезпечують постійний нахил та ЛІНІЙНІСТЬ регулювальнои характеристики у всьому диапазоні зміни кутів управління та при різних параметрах активно-індуктивного навантаження Таким чином, спосіб та пристрій, що заявляються, відповідають критерію винаходу "новизна" При вивченні інших відомих технічних рішень у даній галузі техніки ознаки, що відрізняють рішення, що заявляються, від прототипа, не були виявлені отже, вони забезпечують технічним рішенням, що заявляються, ВІДПОВІДНІСТЬ критерію "ІСТОТНІ ВІДМІНИ" На фіг 1 наведені характеристики аналога На фіг 2 наведені характеристики прототипу На фіг З наведена функціональна електрична схема пристрою, що заявляється На наступних трьох фігурах наведені приклади реалізації блока зв'язку з мережею(фіг 4), перетворювача модуль напруги частота імпульсів(фіг 5) та розподілювача імпульсів(фігб) На фіг 7 наведені часові діаграми, пояснюючі принцип роботи пристрою, що заявляється На фіг 8 наведена блок-схема алгоритма, ВІДПОВІДНО якому працює пристрій, що заявляється На фігурах 9 - 1 0 наведені залежності, пояснюючі принципи функціювання пристрою, що заявляється На фіг 11 наведені характеристики пристрою, що заявляється Пристрій для прямого мікропроцесорного управління тиристорним випрямлячем (фіг 3) містить задатчик 1 сигналів управління, програмуємий таймер 2, що має з задатчиком 1 спільну шинну организацію за рахунок шини адреса, що підключається до АО, А1 та CS входів, шини управління, що підключається до RD та W R входів, та шини даних, що підключається до DO - D7 входів, управляючий вхід GATE О таймера 2 підключен до одного з виходів паралельного пристрою ввода/вивода інформації за датчика 1, управляючі входи GATE 1 та GATE 2 таймера 2 поєднані у спільну точку та підключені до виходу дозволу рахунку блока 3 зв'язку з мережею, тактовий вхід CLK О таймера 2 підключен до виходу перетворювача 4 модуль напруги - частота, вихід OUT О таймера 2 підключен до поєднаних у спільну точку його входів CLK 1 та CLK 2, вихід OUT 1 таймера 2 через перший формувач 5 імпульсів підключен до входу імпульса управління розподілювача 6 імпульсів, до входу закінчення рахунку блока 3 та до першого входу INT 1 запита на переривання задатчика 1, входи синхронізації з мережею блока 3 та перетворювача 4 з'єднані з виводами для підключення живлячої мережі, вихід вибору канала управління блока 3 підключен до входу вибору канала управління розподілювача 6, виходи якого через ВИХІДНІ підсилювачі 7 та 8 підключені до ВІД 10 ПОВІДНИХ управляючих електродів тиристорного випрямляча 9, вихід OUT 2 таймера 2 через другий формувач 10 імпульсів підключен до другого входу INT 2 запиту на переривання задатчика 1 Блок 3 зв'язку з мережею(фіг 4) виконай у вигляді узгоджуючого трансформатора 1 1 , вхід якого є входом синхронізації з мережею блока 3, виходи узгоджуючого трансформатора 11 підключені до входів компаратора 12, вихід якого є виходом вибора канала управління блока 3, крім того, вихід компаратора 12 підключен до входу інвертора 13, D - входу D - тригера 14 та до першого входу логічного елемента І 15, другий вхід якого підключен до інверсного виходу D - тригера 14, прямий вихід D -тригера 14 підключен до першого входу логічного елемента АБО 16, вихід якого підключен до С - входу D - тригера 14, вихід інвертора 13 підключен до D - входу D - тригера 17 та до першого входу елемента І 18, до другого входу якого підключен інверсний вихід D - тригера 17, прямий вихід D - тригера 17 підключен до першого входу логічного елемента АБО 19, вихід якого підключен до С - входу D - тригера 17, другі входи логічних елементів АБО 16 та 19 поєднані у спільну точку та утворюють вхід закінчення рахунку таймера блока 3, виходи логічних елементів І 15,1 18 підключені до входів логічного елемента АБО 20, вихід якого є виходом дозволу рахунку таймера блока З Перетворювач 4 модуль напруги - частота імпульсів(фіг 5) виконай у вигляді узгоджуючого трансформатора 2 1 , вхід якого є входом перетворювача 4, а вихід через виділювач 22 модуля підключен до входу перетворювача 23 напруга - частота, вихід перетворювача 23 є виходом перетворювача 4 Розподілювач 6 імпульсів(фіг 6) виконай у вигляді двох логічних елементів І 24 та ЗАБОРОНА 25, перший вхід логічного елемента І 24 та прямий вхід логічного елемента ЗАБОРОНА 25 поєднані у спільну точку та утворюють вхід імпульса управління розподілювача 6, другий вхід логічного елемента І 24 поєднаний у спільну точку з інверсним входом логічного елемента ЗАБОРОНА 25, яка утворює вхід вибора канапа управління розподілювача 6, виходи логічних елементів ЗАБОРОНА 25 та І 24 є виходами першого та другого каналів управління розподілювача 6 Як задатчик 1 сигналів управління може бути використай управляючий мікроконтролер "Електроніка К1 - 20", який містить однокристальний мікропроцесор зі схемами обрамлення, внутрішній ОЗП, внутрішній програмуємий ПЗП, програмуємий контролер переривань, блок програмуємих паралельних каналів ввода/вивода, блок програмуємих послідовних каналів, генератор синхронізації [див Хвощ О Г , Волынский Н Н , Попов Е А Микропроцессоры и микроЭВМ в системах автоматического управления - Л 1987 - С 5 3 5 - 5 3 6 ] Програмуємий таймер 2 може бути реалізований на мікросхемі КР580ВИ53(див там же с 82 85) ЛОГІЧНІ елементи І, АБО, НІ, ЗАБОРОНА, D тригери та формувачі імпульсів можуть бути реалізовані на мікросхемах серп К155 [див Интегральные микросхемы Справочник /Подред 12 11 47623 БВТарабрина - М 1985-С 58-81] ляча 9, Компаратор 12 може бути реалізований на міа р г - межеве значення кута управління тирискросхемі К554САЗ(див там же с 463 - 465) торами, починаючи з якого випрямляч переходить Виділювач 22 модуля може бути реалізований у режим переривистих струмів Для однофазного на операційних підсилювачах [див Фолкенберри випрямляча, що працює на активно-індуктивне Л Применение операционных усилителей и линавантаження нейных ИС - М 1985 - С 241 - 243, рис 9 6] аГР=ф Перетворювач 23 напруга - частота також може бути виконай на операційних підсилювачах де Ф - кут навантаження випрямляча [див Применение прецизионных аналоговых микПри роботі випрямляча у режимі безперервних росхем/А Г Алексеенко, ЕА Коломбет, Г И Стаструмів у нольовий канал таймера 2 записується ро дуб - М 1985 -С 134-137, рис 3 1, 3 2] деяке число !, значення якого в принципі може ВИХІДНІ підсидювачі 7 та 8 можуть бути реалібути будь-яким, наприклад І_і = 1 зовані за відомими схемами [див ПреобразоватеТаким чином, зміна частоти тактових імпульсів льная техника /В С Руденко, В И Сенько, И М Чиженко - Киев 1983 - С 418 - 425, рис 717, 7 18,7 20] с може бути визначена вираСпосіб прямого мікропроцесорного управління на інтервалі тиристорним випрямлячем полягає в тому, що зом (27) реалізацію розрахункового часу запізнення імпуsin со Д льса управління тиристором відносно момента •-тіЦнр) L, перехода напруги живлячої мережі через ноль здійснюють за допомогою програмуємсго таймера де 4 - коефіцієнт пропорційності між входною Причому число N до запису у перший канал тайнапругою перетворювача 4 та частотою його вихімера 2 попередньо перетворюють ВІДПОВІДНО видного сигнала разу F(N)=Nmax-N N де max (24) . ЧИСЛО, ЯКЄ При ЗЭПИСу у ПерШИЙ КЭ нал таймера 2 забезпечує формування максимального кута управлшня( а т а х ~ ел град ) тиристорами випрямляча та може бути визначено за виразом 2U (25) m N = m - кутова частота напруги живлячої мережі, t - поточний час Якщо регулювання вихідної напруги випрямляча здійснюється у режимі переривистих струмів, то диапазон зміни кута управління складає а г р агт, муємии кут управління гротже, тиристорний випрямляч працює у режимі переривистих струмів З появою строба на виході OUT 2(фіг7, о) спрацьовує формувач 10 та на другий вхід запиту на переривання задатчика 1 надходить сигнал INT 2 За цим сигналом у нольовий канал таймера 2 записується число І_2(див алгоритм на фіг 8) У результаті цього частота тактових імпульсів буде змінюватися ВІДПОВІДНО виразу(28) 3 появою строба на виході OUT 1 (фіг 7, н) спрацьовує формувач 5(фіг7, п), який формує імпульс управління Us з тривалістю, необхідною для надійного відмикання тиристорів випрямляча 9 Розподіл імпульсів управління Us здійснюється у розподілювачі 6(фіг6) за допомогою логічних елементів 1 24 та ЗАБОРОНА 25 з урахуванням сигналу компаратора и-і2(фіг 7, р, о) У виходних підсилювачах 7 та 8 відбувається підсилення управляючих імпульсів, надання їм оптимальної форми, а також здійснюється гальванічне розв'язання системи управління та силової частини випрямляча Таким чином, тиристори відмикаються з деяким кутом а , значення якого визначається фазовою характеристикою(див (46)) Напруга на виході випрямляча 9 при цьому буде визначатися виразом (50) Крім цього, імпульс управління Us через логічний елемент АБО 16 надходить до С-входу Dтригера 14, що забезпечує його установлення у одиницю на прямому виході(фіг 7, д) та у ноль - на інверсному виході(фіг7, г) У результаті зміни стану D-тригера 14 на входах GATE 1 та GATE 2 таймера 2 установлюється сигнал, ВІДПОВІДНИЙ рівню логічного ноля, що є забороненням для роботи його першого та другого каналів(фіг 7, м) За закінченням дм сигнала U12, ВІДПОВІДНОГО ЛОГІЧНОЇ ОДИ НИЦІ на D-вході D-тригера 12, останній переходить у свій вихідний стан(фіг 7, г, д) Під час дії негативної напівхвилі напруги на виході трансформатора 11 працює другий канал блока 3, вмикаючий D-тригер 17 та ЛОГІЧНІ елемен 18 47623 ти 1 18, АБО 19 Принцип роботи цього канала аналогічний принципу роботи першого канала, що описується вище, але усі сигнали зсунені на 180ел град (фіг 7, ж - й, л) Сигнал Us надходить також на перший вхід запиту на переривання задатчика 1 у вигляді сигнала INT1 За цим сигналом(див алгоритм на фіг 8) обчислюється нове значення управляючого впливу F(N), оскільки N за один період роботи перетворювача може змінити своє значення, та здійснюється завантаження каналів таймера 2 числами І_і, F(N) та М Усі наступні процеси повторюються без змін Якщо регулювання вихідної напруги випрямляча здійснюється у режимі безперервних струмів, (X < (X С тобто *Р , то ВІДЛІК числа F(N) у першому каналі таймера 2 закінчиться раніш У цьому випадку виявляється достатньо обчислити нове значення F(N) та перезавантажити перший та другий канали таймера 2(фіг8) Необхідність у перезавантаженні нольового канала таймера 2 відсутня Кут управління тиристорами при цьому визначається фазовою характеристикою (44), а напруга на виході випрямляча 9 - виразом (48) Використання запропонованного способа прямого мікропроцесорного управління тиристорним випрямлячем та пристрою для його здійснення дозволяє забезпечити ЛІНІЙНІСТЬ регулювальної характеристики у всьому диапазоні регулювання напруги на активно-індуктивному навантаженні Така характеристика полегшує використання випрямляча у замкнених системах авторегулювання, оскільки не треба змін коефіцієнта підсилення негативного зворотнього зв'язку Джерела інформації 1 Сен П Тиристорные электроприводы постоянного тока - М Энергоатомиздат, 1985 222с 2 А с СССР №1660116, МКИ 5 Н02 М 7/12 Цифровое устройство управления вентильным преобразователем / Е Й Сокол, А В Кипенский, Ю И Колесник и др Опубл 1991 06 30 Б юл №24 3 Кипенский А В , Ивашов О В , Евменкин М В Анализ влияния режима прерывистых токов на характеристики системы "тиристорный преобразователь - цифровая СИФУ" // Силовая электроника в решении проблем ресурсо- и энергосбережения Сборник трудов международн научн-техн конф Харьков ХПИ, 1993 - С 2 2 6 - 2 2 9 4 Патент 6673 UA, МКВ 5 Н 02 М 7/12 Спосіб прямого микропроцессорного керування тиристорним перетворювачем та пристрій для його здійснення / А В Кіпенський, В Т Долбня, Є І Сокол та ін Опубл 1994 12 29 Бюл № 8 - 1 19 20 47623 отб Фіг 5 Фіг. 6 21 22 47623 t , IП мі Д Фіг. 7 23 47623 24 25 47623 26 к а 1 / 4 _ _ — ^ ~ -——— 2 О W Ы ИД №4 НА ОД ЦТ OS Фіг 9 Оі ОД ftS 0,4 0.5 0* 0,Г 06 ИЭ 27 47623 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 28
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for direct microprocessor control of a thyristor rectifier and a device for realization thereof
Автори англійськоюKypenskyi Andrii Volodymyrovych, Sokol Yevhen Ivanovych
Назва патенту російськоюСпособ непосредственного микропроцессорного управления тиристорным выпрямителем и устройство для осуществления способа
Автори російськоюКипенский Андрей Владимирович, Сокол Евгений Иванович
МПК / Мітки
МПК: H02M 7/12
Мітки: мікропроцесорного, здійснення, керування, пристрій, тиристорним, спосіб, випрямлячем, прямого
Код посилання
<a href="https://ua.patents.su/14-47623-sposib-pryamogo-mikroprocesornogo-keruvannya-tiristornim-vipryamlyachem-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб прямого мікропроцесорного керування тиристорним випрямлячем та пристрій для його здійснення</a>
Спосіб прямого мікропроцесорного керування тиристорним перетворювачем та пристрій для його здійснення
Номер патенту: 6673
Опубліковано: 29.12.1994
Автори: Кипенський Андрій Володимирович, Савченко Ігор Анатолійович, Долбня Віктор Тимофійович, Сокіл Євген Іванович
МПК: H02M 7/12
Мітки: прямого, керування, тиристорним, пристрій, мікропроцесорного, здійснення, спосіб, перетворювачем
Формула / Реферат:
(57) 1. Способ прямого микропроцессорного управления тиристорным преобразователем, включающий запись в таймер числа N, отсчет этого числа путем уменьшения его на единицу с приходом каждого тактового импульса, начиная с момента перехода напряжения питающей сети через нуль, иформирование по окончании отсчета числа управляющих импульсов тиристорами, отличающийся тем, что частоту следования тактовых импульсов формируют пропорционально модулю...
Спосіб прямого мікропроцесорного керування напівпровідниковим перетворювачем електроенергії та пристрій для його здійснення
Номер патенту: 23060
Опубліковано: 30.06.1998
Автори: Рябенький Володимир Іванович, Кипенський Андрій Володимирович, Поленов Олександр Миколаєвич, Сокіл Євген Іванович
МПК: H02M 7/12
Мітки: керування, мікропроцесорного, прямого, пристрій, напівпровідниковим, перетворювачем, електроенергії, спосіб, здійснення
Формула / Реферат:
1. Способ прямого микропроцессорного управления полупроводниковым преобразователем электроэнергии, включающий преобразование исходного числа N, эквивалентного сигналу управления, в соответствии с выражениемF(N) = Nmax - N,где F(N) - результат преобразования исходного числа, полученный выполнением операции вычитания;-Nmax - значение числа (постоянная величина), которое при записи в таймер обеспечивает формирование...
Спосіб мікропроцесорного керування напівпровідниковим перетворювачем електроенергії та пристрій для його здійснення
Номер патенту: 29431
Опубліковано: 15.11.2000
Автори: Кипенський Андрій Володимирович, Базакуца Вікторія Вікторівна, Сокіл Євген Іванович, Івашов Олег Володимирович
МПК: H02M 7/12
Мітки: спосіб, пристрій, керування, напівпровідниковим, електроенергії, здійснення, мікропроцесорного, перетворювачем
Текст:
...полупроводникового преобразователя путем обеспечения ее инвариантности по отношению к изменениям напряжения питающей сети Поставленная задача решается при помощи то го, что в способе микропроцессорного управления полупроводниковым преобразователем электроэнергии, включающем запись в таймер числа, предварительно преобразованного по выражению , ч F (N) *= f-W - N , где Nmax - максимальное значение числа, которое может быть записано в...
Спосіб керування роботою апарата вакуумної терапії та пристрій для його здійснення
Номер патенту: 43186
Опубліковано: 15.11.2001
Автори: Володось Микола Леонтіїйович, Лоскуткін Віктор Миколайович, Молошний Михайло Володимирович, Скідан Василь Іванович, Каплін Генадій Іванович, Пономарьов Юрій Максимович
МПК: A61M 1/00
Мітки: апарата, вакуумної, роботою, керування, пристрій, терапії, здійснення, спосіб
Формула / Реферат:
1. Спосіб керування роботою апарата вакуумної терапії шляхом періодичної подачі на електродвигун вакуум-помпи апарата розрахункової напруги і відключення її при досягненні фактичного рівня розрідження в апараті, що дорівнює заданому, який відрізняється тим, що подачу напруги на електродвигун здійснюють дискретно, збільшуючи тривалість імпульсу напруги у міру зниження різниці між заданим і фактичним рівнями розрідження пропорційно навантаженню...
Спосіб прямого відновлювання матеріалу, що містить оксиди заліза, і пристрій для його здійснення
Номер патенту: 27080
Опубліковано: 28.02.2000
Автори: ФЛУХ Роланд, ПЄЄР Гюнтер, ЧЕРМАК Карл, УІПП Рой Хуберт мол.
МПК: C21B 13/00, C21B 13/02
Мітки: пристрій, спосіб, відновлювання, здійснення, заліза, прямого, оксиди, містить, матеріалу
Формула / Реферат:
1. Способ прямого восстановления материала, содержащего оксиды железа, причем восстановительный газ, содержащий H2S и полученный путем смешивания газа синтеза и колошникового газа, полученного при прямом восстановлении материала, содержащего оксиды железа, применяют для прямого восстановления и нагрева материала, содержащего оксиды железа, до температуры восстановления, отличающийся тем, что как газ синтеза, так и колошниковый газ подвергают...
Попередній патент: Спосіб одержання озонованої олії “озонід”
Наступний патент: Вихлопний пристрій парової турбіни
Випадковий патент: Спосіб діагностики целіакії