Спосіб установки автоматичної системи керування рівнем струга у стругових виїмках вугільної промисловості
Формула / Реферат
1. Спосіб установки автоматичної системи керування рівнем струга (17) в обладнаних гідравлічним щитовим кріпленням і напрямним стругом (17) на виконаній на ньому напрямній (18) струга і забійним конвеєром (16) діючих очисних вибоях у підземному видобутку кам'яного вугілля, при цьому забійний конвеєр (16), включаючи струг, що направляється на ньому, (17), виконаний з можливістю зміни його положення у напрямку розробки за допомогою системи керування стрілоподібним виконавчим органом, що опирається на щитове кріплення, іза допомогою системи керування стрілоподібним виконавчим органом є встановлюваним кут (20) поздовжнього нахилу для установки руху струга (17) у напрямку розробки у вигляді руху на підйом, руху на занурення або нейтрального руху, при цьому для кожного ходу струга глибину (21) різання й кут (20) поздовжнього нахилу, який одержують як різницевий кут між нахилом перекриття (11) покрівлі пласта кістяка (10) щитового кріплення й нахилом забійного конвеєра (16) у напрямку розробки, реєструють, і в обчислювальному пристрої наступну з цього зміну висоти вибою на хід струга розраховують таким чином, що в обчислювальному пристрої з кожним відповідним одному ходу струга положенням забійного конвеєра (16) у вибої співвідносять висоту вибою як планову висоту, і при цьому при досягненні відповідного положення у вибої наступним за стругом (17) із затримкою у часі кістяком (10) щитового кріплення розраховують фактичну висоту вибою на основі знятих установленими на кістяку (10) щитового кріплення датчиками (15) нахилу величин і порівнюють зі збереженою у пам'яті плановою висотою, і при цьому визначена для відповідного положення у вибої величина (28) різниці висот між плановою висотою й фактичною висотою при наступних ходах струга враховується як ефект самонавчання обчислювальним пристроєм при заданні підлягаючого установці для досягнення планової висоти вибою кута (20) поздовжнього нахилу для струга (17).
2. Спосіб за п. 1, у якому на основі підлягаючого установці для досягнення заданої висоти вибою за допомогою циклу регулювання кута (20) поздовжнього нахилу, що містить безліч ходів струга, в обчислювальному пристрої попередньо розраховують заданий нахил забійного конвеєра (16), що одержують у розрахунку на хід струга, у напрямку розробки й погоджують з вимірюваним у кожному положенні у вибої у розрахунку на хід струга за допомогою встановлених на забійному конвеєрі (16) датчиків (15) нахилу фактичним нахилом забійного конвеєра (16), при цьому при встановлених відхиленнях факультативно коректують діючий для наступного ходу струга кут (20) поздовжнього нахилу.
3. Спосіб за одним з пп. 1 або 2, у якому відповідно заданий обчислювальним пристроєм кут (20) поздовжнього нахилу співвідносять з величиною (28) різниці висот, яку одержують у розрахунку на хід струга, і зберігають в обчислювальному пристрої певні у рамках ефекту самонавчання граничні кути поздовжнього нахилу діапазону (31) відбиття, у межах якого відповідно діючі, у тому числі й різні, кути поздовжнього нахилу не роблять змін висоти вибою.
4. Спосіб за п. 3, у якому при установці необхідного для досягнення заданої висоти вибою, що приводить до руху на підйом або руху на занурення струга, (17) кута (20) поздовжнього нахилу враховують величину відповідно діючого діапазону (31) відбиття, і кут (20) поздовжнього нахилу для здійснення руху на підйом або руху на занурення встановлюють на величину, що знаходиться поза діапазоном (31) відбиття.
5. Спосіб за одним із пп. 1-4, у якому при зміні положення розпорювального різця струга стосовно до тенденції занурення, тенденції підйому або нейтрального руху струга на обчислювальний пристрій передають інформацію про змінене положення розпорювального різця.
6. Спосіб за п. 5, у якому в обчислювальному пристрої запитують придатну для встановленого положення розпорювального різця, вивчену на пройденій очисній виїмці характеристику для співвідношення кута поздовжнього нахилу й величини різниці висот.
7. Спосіб за одним із пп. 1-6, у якому за допомогою визначення нахилу перекриття (11) покрівлі пласта кістяків (10) щитового кріплення у напрямку розробки розпізнають обрис западини й/або сідловини у напрямку розробки, і в обчислювальному пристрої встановлюють адаптацію сліду різу струга (17) паралельно обрису покрівлі пласта, і за допомогою адаптації кута (20) поздовжнього нахилу системи керування рівнем струга встановлюють адаптовану задану висоту вибою, що включає у себе відповідну радіусу кривизни западини або ж сідловини додаткову висоту.
8. Спосіб за одним із пп. 1-7, у якому за допомогою триваючої як від ходу струга до ходу струга, так і при простої вибою реєстрації висоти кістяків (10) щитового кріплення визначають відповідно наступну конвергенцію, і постійно враховують за допомогою адаптації підлягаючу залученню для установки кута (20) поздовжнього нахилу системи керування рівнем струга величину (28) різниці висот.
9. Спосіб за п. 8, у якому для періодів простою діючого очисного вибою у визначення величини (28) різниці висот залучають очікувану конвергенцію.
10. Спосіб за одним з пп. 8 або 9, у якому при виниклому під час простою вибою підйомі підошви реєструють зміну нахилу забійного конвеєра (16) при простої струга (17), і перед початком роботи струга знову розраховують необхідний для досягнення заданої висоти вибою кут (20) поздовжнього нахилу.
11. Спосіб за одним із пп. 1-10, у якому безліч кістяків (10) щитового кріплення й стосовних до них циліндрів (35) стрілоподібного виконавчого органа об'єднані у групу, керовану системою автоматичного контролю груп.
12. Спосіб за п. 11, у якому для кожного окремого кістяка (10) щитового кріплення у межах однієї групи визначають кут (20) поздовжнього нахилу для відповідного циліндра (35) стрілоподібного виконавчого органа, і з окремих кутів поздовжнього нахилу стосовних до групи кістяків (10) щитового кріплення утворюють середню величину, і у системі автоматичного контролю груп установлюють кут (20) поздовжнього нахилу, що відповідає середній величині.
13. Спосіб за одним з пп. 11 або 12, у якому у системах автоматичного контролю груп суміжних у вибої, з'єднаних засобами системи керування груп кістяків (10) щитового кріплення діючі для суміжних груп кути (20) поздовжнього нахилу погоджують один із одним таким чином, щоб для запобігання механічному перевантаження з'єднань співвіднесених із групами часткових секцій лотка забійного конвеєра (16) не перевищувалися попередньо встановлені максимальні різниці між діючими для суміжних груп кутами (20) поздовжнього нахилу.
14. Спосіб за п. 13, у якому в узгодження діючих для суміжних груп кутів (20) поздовжнього нахилу залучають існуючі між групами відмінності за висотою у положенні забійного конвеєра (16).
15. Спосіб за одним з пп. 13 або 14, у якому існуючі між групами у напрямку розробки виступи й/або відступи при проходженні забійного конвеєра (16) і кістяків (10) щитового кріплення уздовж фронту очисних робіт залучають в узгодження діючих для суміжних груп кутів (20) поздовжнього нахилу.
16. Спосіб за одним із пп. 1-15, у якому кероване обчислювальним пристроєм підрегулювання кута (20) поздовжнього нахилу відбувається при кожному ході струга винятково й однократно слідом за проходом струга й завершенням процесу пересування кістяків (10) щитового кріплення.
17. Спосіб за одним із пп. 11-16, у якому з групою з'єднаних один із одним за допомогою системи автоматичного контролю груп кістяків щитового кріплення відповідно співвіднесений центральний, установлений на забійному конвеєрі (16) датчик (15) нахилу.
18. Спосіб за одним із пп. 11-16, у якому у межах групи з'єднаних один із одним за допомогою системи керування кріплення кістяків (10) щитового кріплення відповідно розташована безліч установлених на окремих лотках забійного конвеєра (16) датчиків нахилу.
19. Спосіб за одним із пп. 1-18, у якому нахил забійного конвеєра (16) вимірюють за допомогою встановленого на забійному конвеєрі (16) датчика (15) нахилу.
20. Спосіб за одним із пп. 1-19, у якому встановлений на забійному конвеєрі (16) блок датчиків нахилу виконаний у вигляді здвоєного датчика, що має два датчики нахилу однакової конструкції.
21. Спосіб за одним із пп. 1-19, у якому встановлений на забійному конвеєрі (16) блок датчиків нахилу складається з двох однакових, установлених з обертанням у протилежних напрямках навколо осі вимірювання датчиків.
22. Спосіб за одним із пп. 1-21, у якому гідравлічні циліндри (35) стрілоподібного виконавчого органа, що спираються між кістяками (10) щитового кріплення й забійним конвеєром (16), системи керування стрілоподібним виконавчим органом виконані з можливістю гідравлічного блокування за допомогою впливаючих окремо на їхні поршневі поверхні та їхні кільцеві поверхні гідравлічно деблокованих зворотних клапанів після досягнення їхнього керуючого положення, при цьому зворотні клапани за допомогою співвіднесених ліній керування з'єднані зі співвіднесеною системою автоматичного контролю груп.
23. Спосіб за п. 22, у якому через інтервали часу використовують синхронізацію циліндрів (35) стрілоподібного виконавчого органа за рахунок того, що всі циліндри (35) стрілоподібного виконавчого органа переміщають до кінцевого упору, а потім установлюють необхідний у відповідному положенні забійного конвеєра (16) у вибої й установленого на ньому струга (17) кут (20) поздовжнього нахилу.
Текст
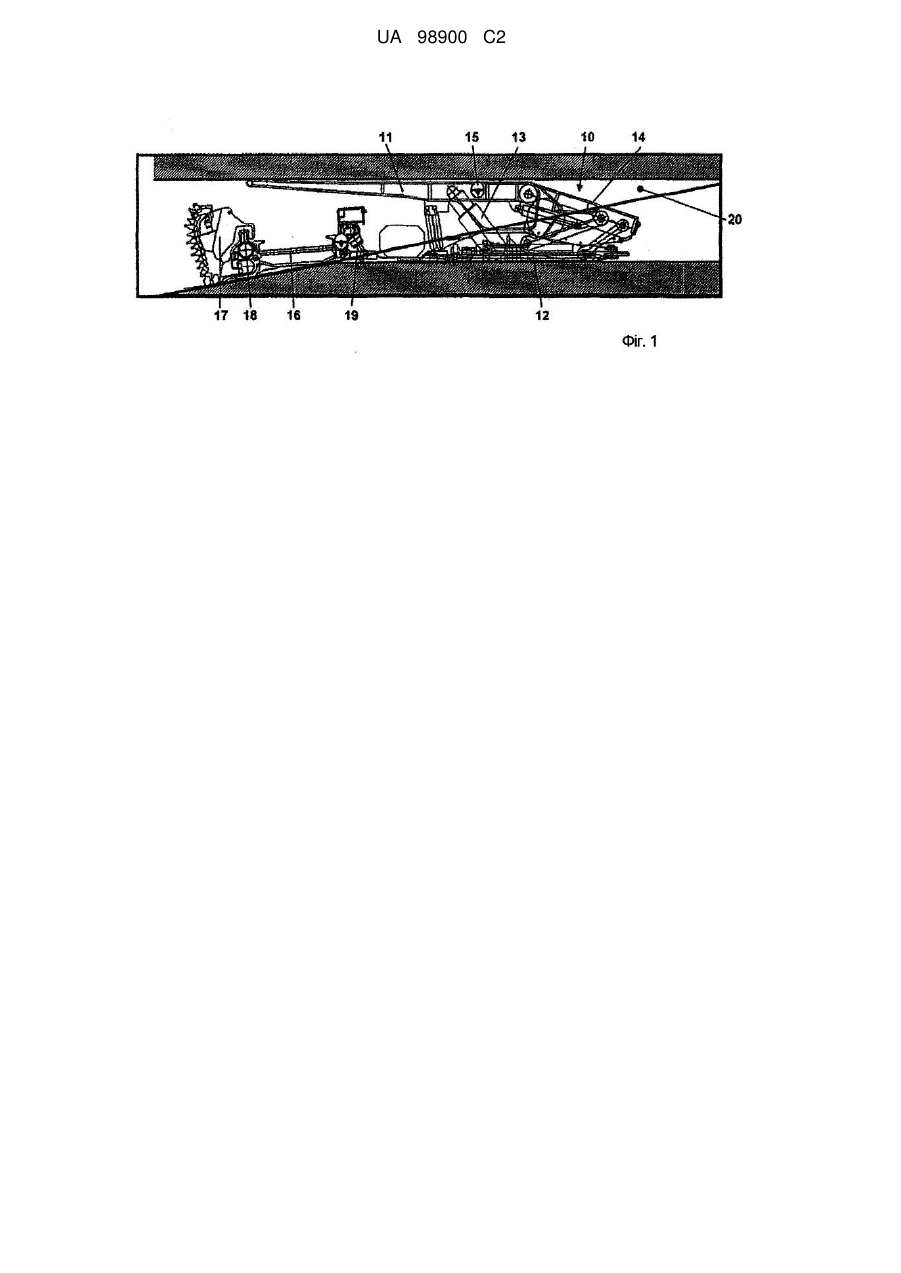
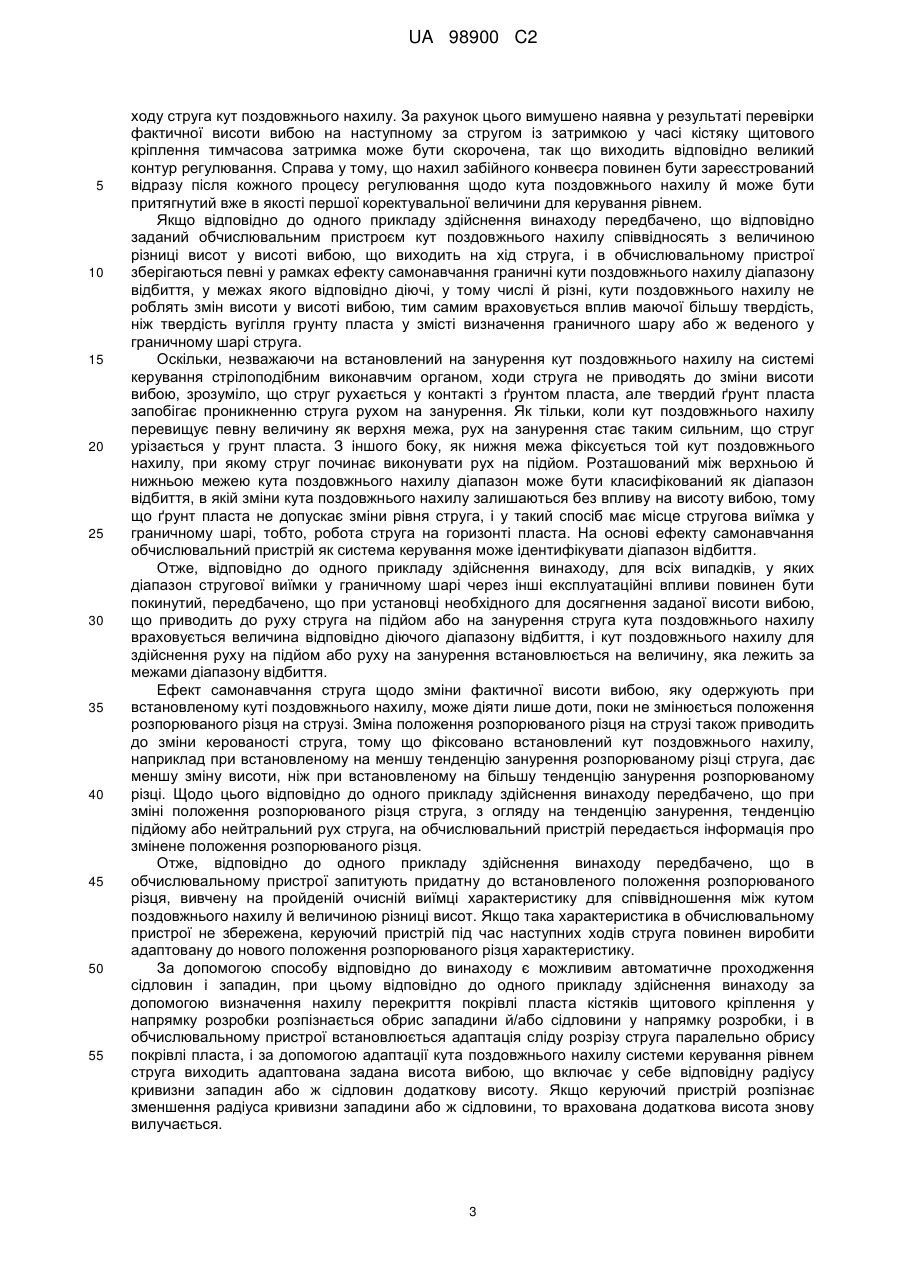
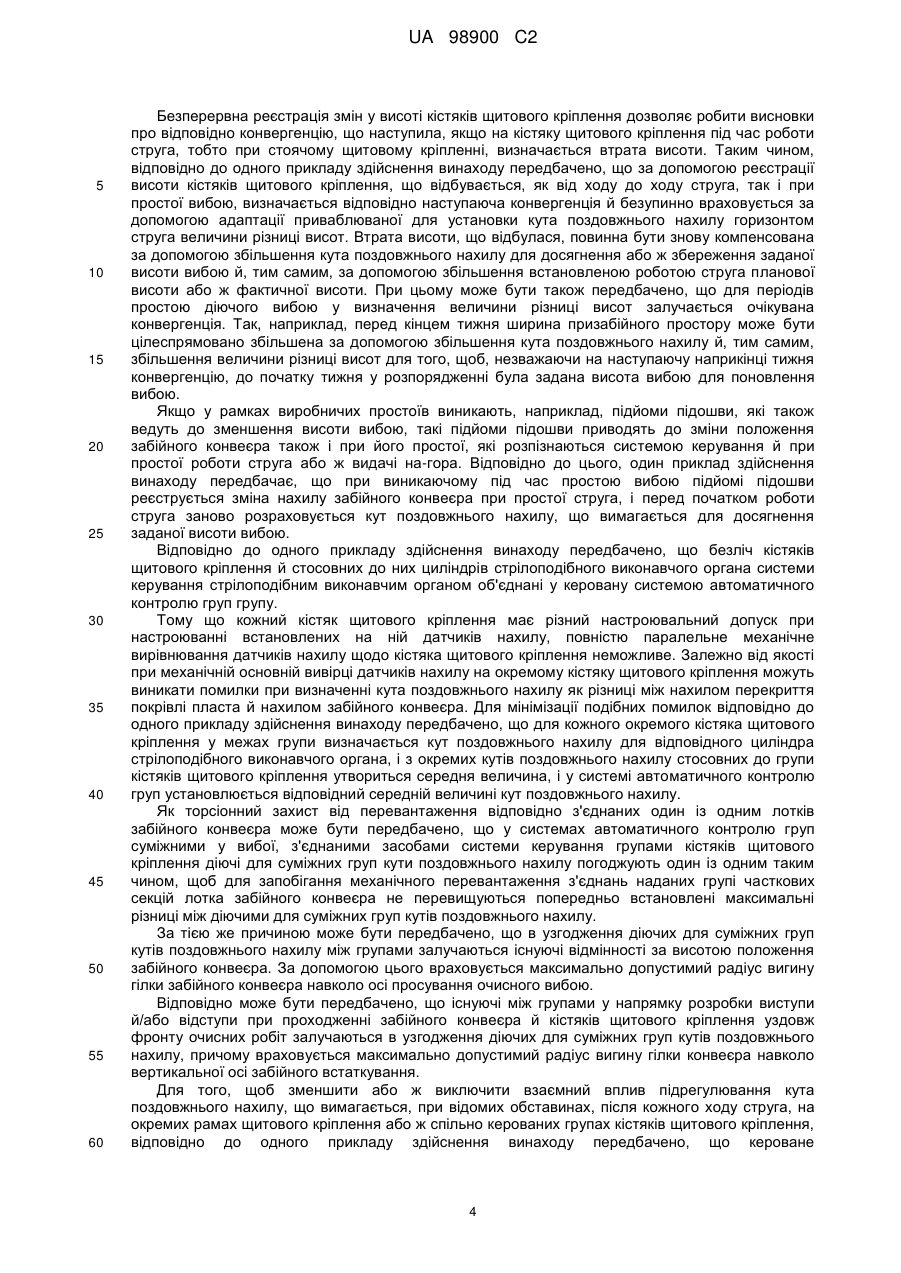
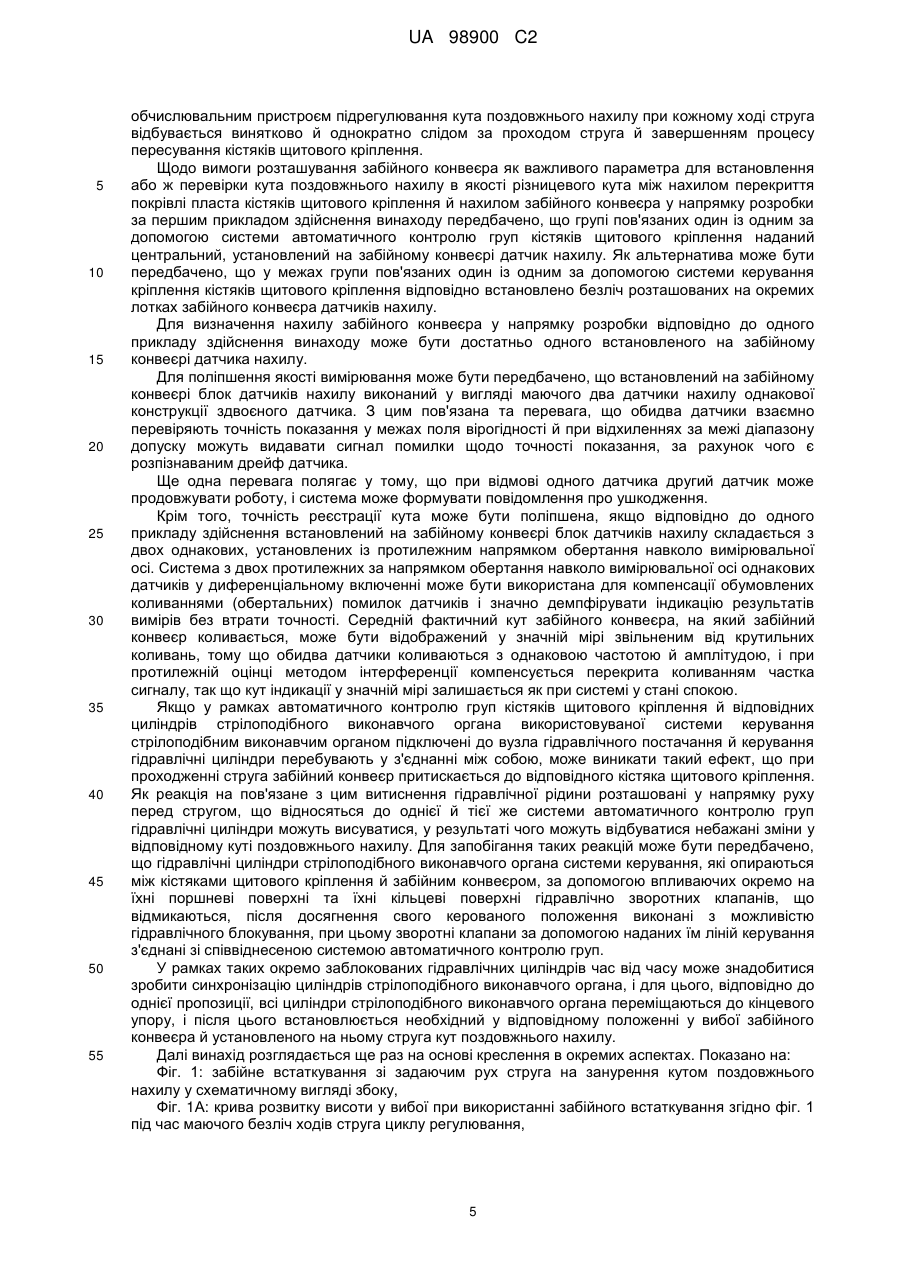
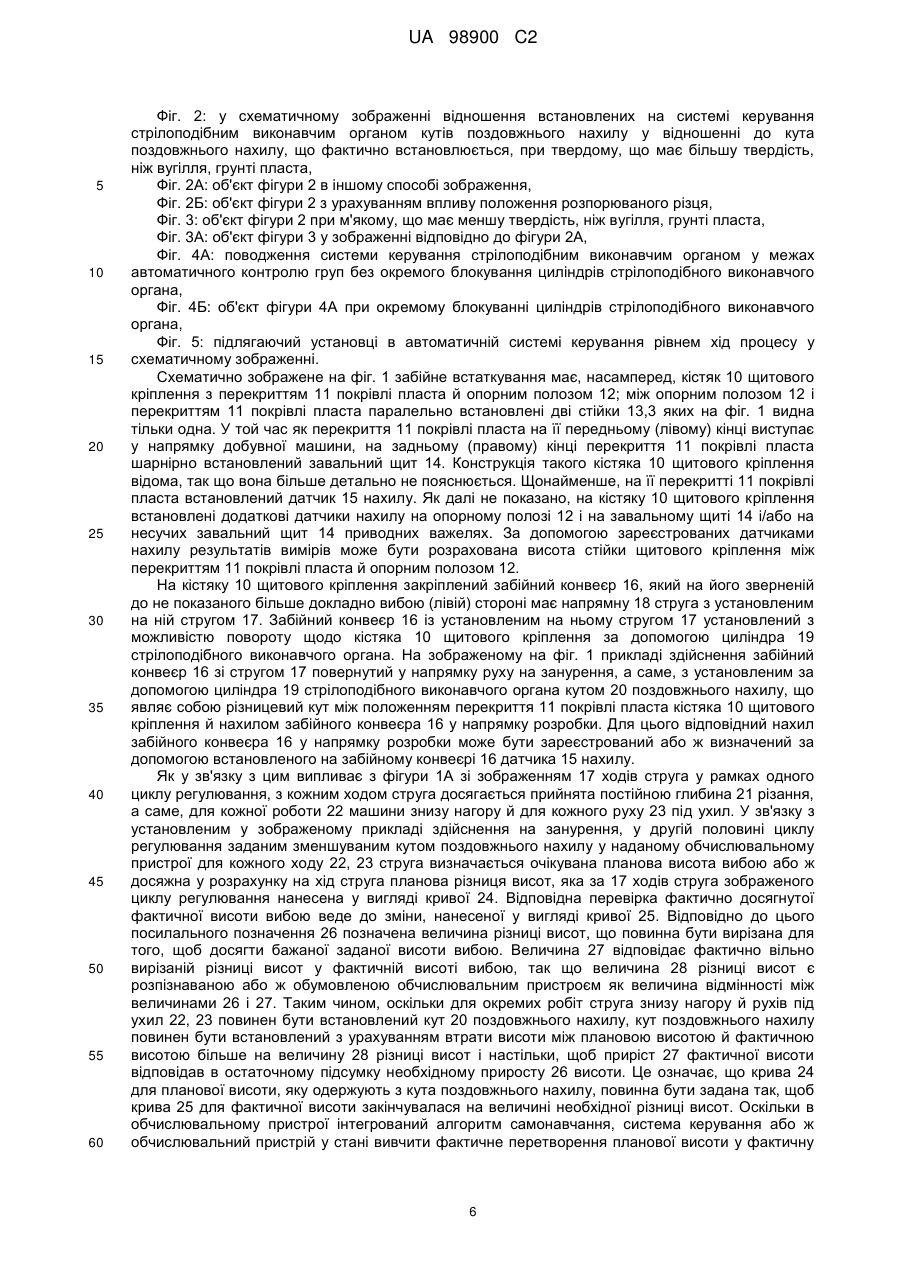
Реферат: Спосіб установки автоматичної системи керування рівнем струга у діючих очисних вибоях, при цьому струг (17) виконаний з можливістю зміни його положення у русі на підйом, русі на занурення або нейтральному русі за допомогою системи керування стрілоподібним виконавчим органом, при цьому для кожного ходу струга глибину (21) різання й кут (20) поздовжнього нахилу, що одержують як різницевий кут між нахилом перекриття (11) покрівлі пласта кістяка (10) щитового кріплення й нахилом забійного конвеєра (16) у напрямку розробки, реєструють, і в обчислювальному пристрої наступну з цього зміну висоти вибою на хід струга розраховують таким чином, що в обчислювальному пристрої з кожним відповідним одному ходу струга положенням забійного конвеєра (16) у вибої співвідносять висоту вибою як планову висоту, і при цьому при досягненні відповідного положення у вибої наступним за стругом (17) із затримкою у часі кістяком (10) щитового кріплення розраховують фактичну висоту вибою на основі знятих установленими на кістяку (10) щитового кріплення датчиками (15) нахилу величин і порівнюють зі збереженою у пам'яті плановою висотою, і при цьому визначена для відповідного положення у вибої величина (28) різниці висот між плановою висотою й фактичною висотою при наступних ходах струга враховується як ефект самонавчання обчислювальним пристроєм при заданні підлягаючого установці для досягнення планової висоти вибою кута (20) поздовжнього нахилу для струга (17). UA 98900 C2 (12) UA 98900 C2 UA 98900 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід відноситься до способу установки автоматичної системи керування рівнем струга, які оснащені гідравлічним щитовим кріпленням і мають на виконаній на ньому напрямній струга струг забійним конвеєром діючих очисних вибоях у підземній розробці родовищ кам'яного вугілля, при цьому забійний конвеєр, включаючи струг, що направляється на ньому, виконаний з можливістю зміни його положення у напрямку розробки за допомогою системи керування стрілоподібним виконавчим органом, що опирається на щитове кріплення, і за допомогою системи керування стрілоподібним виконавчим органом є встановлюваним кут поздовжнього нахилу для установки руху струга у напрямку виїмки як руху на підйом, руху на занурення або нейтрального руху. Проблема при автоматичному керуванні горизонтом стругових виїмок, як у напрямку розробки, так і у напрямку очисної виїмки полягає, зокрема, у тому, щоб, з одного боку, одержати досить велику ширину призабійного простору для того, щоб забезпечити прохід забійного встаткування, наприклад, без зіткнень між стругом і кістяками щитового кріплення при просуванні струга повз них, а з іншого боку, підтримувати як можна меншим вихід порожньої породи при добувних роботах, відповідно до цього по можливості обмежити добувну роботу горизонтом пласта без захоплення занадто великої кількості бічної породи. По суті наявні у розпорядженні перед очисною виїмкою дані родовища про потужність пласта, горизонт ґрунту пласта або ж покрівлі пласта й наявності сідловин і/або западин, як у напрямку розробки, так і у напрямку руху струга є занадто неточними для того, щоб засновувати на цьому автоматизоване керування роботою струга й кріплення, включаючи підтримку необхідної заданої висоти вибою. Оснащений різцями струг має обумовлену установкою постійну висоту різання й порівняно невелику глибину різання з порядком величини близько 60 мм, так що на відміну від ріжучого видобутку, висота різання, у всякому випадку під час ходу струга уздовж фронту очисних робіт, не є змінюваною. У стругових виїмках система керування рівнем струга влаштована за допомогою розташованого між забійним конвеєром у вигляді нерухливої напрямної струга й прикріпленим до нього кістяком щитового кріплення керуючого циліндра у вигляді так званої системи керування стрілоподібним виконавчим органом. Таким чином, за допомогою змінюваного за допомогою системи керування стрілоподібним виконавчим органом нахилу забійного конвеєра у напрямку розробки додатково до нейтрального за горизонтом керування, забійному конвеєру й, тим самим стругу, що направляється на ньому, також і під час добувних робіт може бути переданий рух на занурення у напрямку розробки, в якому струг відсипає у відвал за допомогою врізу своїх розпорюваних різців у ґрунт пласта, або ж рух на підйом, у якому струг виконує очисну виїмку, що піднімається. У рамках добувних робіт за допомогою струга повинно бути можливим дотримання певної ширини призабійного простору, при цьому ця ширина призабійного простору визначається відстанню між перекриттям покрівлі пласта й опорним полозом відповідного кістяка щитового кріплення в області шляху її руху. Насамперед, при мінливому горизонті ґрунту пласта або ж при м'якому ґрунті пласта, що має меншу твердість, ніж підлягаюче видобутку вугілля, важливо дотримуватися заданої висоти вибою за допомогою постійного контролю й адаптації системи керування рівнем струга. Якщо ґрунт пласта твердіше, ніж підлягаючий очисний виїмці пласт, то керування рівнем струга також можливо відповідно до відомого способу струга граничного шару на ґрунті пласта, при якому твердий ґрунт пласта переймає певну напрямну функцію для струга. У рамках відомого для цього способу за допомогою встановленого у рівні розпорюваного різця струга датчика визначається, чи ріже розпорюваний різець струга у бічній породі, тобто у грунті пласта, або у вугіллі. Цей спосіб є уразливим, насамперед, з боку його апаратного забезпечення, тому що відповідний датчик і стосовний до нього пристрій, що аналізує, вмонтований в екстремально суворому оточенні у струзі або на струзі й тому піддане відповідним навантаженням або ж виникненню дефектів. Крім того, мобільність струга вимагає електроживлення апаратного встаткування за допомогою акумулятора й передачі даних по радіо за допомогою декількох розташованих у вибої транспондерів, при цьому радіоумови, насамперед у низьких вибоях з високим вмістом феромагнітних компонентів забійного встаткування, контролювати дуже важко. Крім того, цей спосіб також і за його показниками обтяжений погрішностями або ж обумовлює відповідні тимчасові запізнювання при можливо потрібному регулюванні, тому що більш-менш надійне показання про розрізаний стругом матеріал може бути видано лише після декількох ходів струга, тобто після декількох, як правило приблизно після п'яти, просувань повз кістяк щитового кріплення. Тому, в основу винаходу покладене завдання розробки способу зазначеного спочатку виду, в якому у всіх робочих станах діючого очисного вибою є можливою автоматизація роботи струга 1 UA 98900 C2 5 10 15 20 25 30 35 40 45 50 55 60 й кріплення з урахуванням одержання певної ширини призабійного простору й/або ведення діючого очисного вибою на горизонті ґрунту пласта. Рішення цього завдання випливає, включаючи кращі варіанти здійснення й удосконалення винаходу, зі змісту формули винаходу, що викладена після цього опису. Для цього винахід передбачає спосіб, у якому для кожного ходу струга реєструється глибина різу й, одержаний в якості різницевого кута між нахилом перекриття покрівлі пласта кістяків щитового кріплення й нахилом забійного конвеєра у напрямку розробки кут поздовжнього нахилу, і, випливаючи з цього зміна висоти вибою у розрахунку на хід струга в обчислювальному пристрої розраховується таким чином, що в обчислювальному пристрої кожному відповідному одному ходу струга положенню забійного конвеєра у вибої співвідноситься висота вибою як планова висота, і при цьому при досягненні відповідного положення у вибої наступним за стругом із затримкою у часі кістяком щитового кріплення на основі зареєстрованих установленими на стійці щитового кріплення датчиками нахилу величин розраховується фактична висота вибою й порівнюється зі збереженою у пам'яті плановою висотою, і при цьому визначена для відповідного положення у вибої величина різниці висот між плановою висотою й фактичною висотою як ефект самонавчання враховується обчислювальним пристроєм при завданні встановлюваного для досягнення планової висоти вибою кута поздовжнього нахилу для струга при наступних ходах струга. Спосіб дії відповідно до винаходу виходить, насамперед, з того, що залежно від глибини різання струга при кожному ході струга на основі встановленого кута поздовжнього нахилу одержують зміну висоти вибою щодо прийнятого незмінним або ж залишається таким же й за допомогою лежачого на покрівлі пласта перекриття покрівлі пласта кожного кістяка щитового кріплення фіксований горизонт покрівлі пласта. Встановлене за допомогою кута поздовжнього нахилу занурення струга відповідно веде до збільшення висоти вибою, а підйом струга веде до зменшення висоти вибою. Таким чином, залежно від установленого на системі керування стрілоподібним виконавчим органом кута поздовжнього нахилу, виходячи з існуючої висоти вибою, може бути розрахована теоретично наявна після виконання ходу струга планова висота вибою. Однак через відповідно пануючі умови експлуатації у виробничій практиці планова висота не досягається. Більше того, виходить менша фактична висота вибою, що відповідно до винаходу при досягненні відповідного положення у вибої визначається наступним за стругом із затримкою у часі кістяком щитового кріплення. Розрахунок фактичної висоти відбувається на основі зареєстрованих установленими на кістяку щитового кріплення датчиками нахилу величин; однак реєстрація величин, що вимагаються, і метод розрахунку самі по собі не є предметом винаходу. У зв'язку з відхиленням між плановою висотою й фактичною висотою вибій при постійному використанні встановленого на системі керування стрілоподібним виконавчим органом кута поздовжнього нахилу не досяг би заданої за технікою розробки висоти вибою або ж досяг би лише зі значною затримкою у часі. Щодо цього відповідно до винаходу відповідно підлягаюча для дотримання заданої висоти вирівнюванню величина різниці висот між плановою висотою й фактичною висотою вже враховується при установці кута поздовжнього нахилу, при цьому, наприклад, для досягнення певної зміни висоти з урахуванням дотримання заданої висоти вибою через цикл регулювання, що складається з декількох ходів струга, кут поздовжнього нахилу встановлюється на величину, більшу або ж меншу на відповідній установленій величині різниці висох для того, щоб відповідно досягнута фактична висота вибою відповідала бажаній висоті. На основі виробленій при кожному ході струга реєстрації величин і розрахунку змін висоти й прийому висоти вибою, що встановлює зворотній зв'язок, при однаковому положенні у вибої встановлюється замкнутий контур регулювання для керування рівнем струга. Тому що обчислювальний пристрій через безперервну очисну виїмку постійно реєструє й контролює перетворення кута поздовжнього нахилу у зміну висоти вибою, що фактично відбувається, забезпечується використання ефекту самонавчання за допомогою збережених в обчислювальному пристрої здатних до самонавчання алгоритмів, так що керування співвідносить з певними кутами поздовжнього нахилу на системі керування стрілоподібним виконавчим органом відповідно фактично досягнуті або ж досяжні висоти вибою. Відповідно до одного прикладу здійснення винаходу передбачено, що на основі встановлюваного для досягнення заданої висоти вибою за допомогою циклів регулювання кута поздовжнього нахилу, що містять безліч ходів струга, попередньо розраховується заданий нахил, що вийшов на хід струга, забійного конвеєра у напрямку розробки й погоджують з вимірюваним у кожному положенні у вибої у розрахунку на хід струга за допомогою встановлених на забійному конвеєрі датчиків нахилу фактичним нахилом забійного конвеєра, при цьому при встановлених відхиленнях факультативно коректується діючий для наступного 2 UA 98900 C2 5 10 15 20 25 30 35 40 45 50 55 ходу струга кут поздовжнього нахилу. За рахунок цього вимушено наявна у результаті перевірки фактичної висоти вибою на наступному за стругом із затримкою у часі кістяку щитового кріплення тимчасова затримка може бути скорочена, так що виходить відповідно великий контур регулювання. Справа у тому, що нахил забійного конвеєра повинен бути зареєстрований відразу після кожного процесу регулювання щодо кута поздовжнього нахилу й може бути притягнутий вже в якості першої коректувальної величини для керування рівнем. Якщо відповідно до одного прикладу здійснення винаходу передбачено, що відповідно заданий обчислювальним пристроєм кут поздовжнього нахилу співвідносять з величиною різниці висот у висоті вибою, що виходить на хід струга, і в обчислювальному пристрої зберігаються певні у рамках ефекту самонавчання граничні кути поздовжнього нахилу діапазону відбиття, у межах якого відповідно діючі, у тому числі й різні, кути поздовжнього нахилу не роблять змін висоти у висоті вибою, тим самим враховується вплив маючої більшу твердість, ніж твердість вугілля грунту пласта у змісті визначення граничного шару або ж веденого у граничному шарі струга. Оскільки, незважаючи на встановлений на занурення кут поздовжнього нахилу на системі керування стрілоподібним виконавчим органом, ходи струга не приводять до зміни висоти вибою, зрозуміло, що струг рухається у контакті з ґрунтом пласта, але твердий ґрунт пласта запобігає проникненню струга рухом на занурення. Як тільки, коли кут поздовжнього нахилу перевищує певну величину як верхня межа, рух на занурення стає таким сильним, що струг урізається у грунт пласта. З іншого боку, як нижня межа фіксується той кут поздовжнього нахилу, при якому струг починає виконувати рух на підйом. Розташований між верхньою й нижньою межею кута поздовжнього нахилу діапазон може бути класифікований як діапазон відбиття, в якій зміни кута поздовжнього нахилу залишаються без впливу на висоту вибою, тому що ґрунт пласта не допускає зміни рівня струга, і у такий спосіб має місце стругова виїмка у граничному шарі, тобто, робота струга на горизонті пласта. На основі ефекту самонавчання обчислювальний пристрій як система керування може ідентифікувати діапазон відбиття. Отже, відповідно до одного прикладу здійснення винаходу, для всіх випадків, у яких діапазон стругової виїмки у граничному шарі через інші експлуатаційні впливи повинен бути покинутий, передбачено, що при установці необхідного для досягнення заданої висоти вибою, що приводить до руху струга на підйом або на занурення струга кута поздовжнього нахилу враховується величина відповідно діючого діапазону відбиття, і кут поздовжнього нахилу для здійснення руху на підйом або руху на занурення встановлюється на величину, яка лежить за межами діапазону відбиття. Ефект самонавчання струга щодо зміни фактичної висоти вибою, яку одержують при встановленому куті поздовжнього нахилу, може діяти лише доти, поки не змінюється положення розпорюваного різця на струзі. Зміна положення розпорюваного різця на струзі також приводить до зміни керованості струга, тому що фіксовано встановлений кут поздовжнього нахилу, наприклад при встановленому на меншу тенденцію занурення розпорюваному різці струга, дає меншу зміну висоти, ніж при встановленому на більшу тенденцію занурення розпорюваному різці. Щодо цього відповідно до одного прикладу здійснення винаходу передбачено, що при зміні положення розпорюваного різця струга, з огляду на тенденцію занурення, тенденцію підйому або нейтральний рух струга, на обчислювальний пристрій передається інформація про змінене положення розпорюваного різця. Отже, відповідно до одного прикладу здійснення винаходу передбачено, що в обчислювальному пристрої запитують придатну до встановленого положення розпорюваного різця, вивчену на пройденій очисній виїмці характеристику для співвідношення між кутом поздовжнього нахилу й величиною різниці висот. Якщо така характеристика в обчислювальному пристрої не збережена, керуючий пристрій під час наступних ходів струга повинен виробити адаптовану до нового положення розпорюваного різця характеристику. За допомогою способу відповідно до винаходу є можливим автоматичне проходження сідловин і западин, при цьому відповідно до одного прикладу здійснення винаходу за допомогою визначення нахилу перекриття покрівлі пласта кістяків щитового кріплення у напрямку розробки розпізнається обрис западини й/або сідловини у напрямку розробки, і в обчислювальному пристрої встановлюється адаптація сліду розрізу струга паралельно обрису покрівлі пласта, і за допомогою адаптації кута поздовжнього нахилу системи керування рівнем струга виходить адаптована задана висота вибою, що включає у себе відповідну радіусу кривизни западин або ж сідловин додаткову висоту. Якщо керуючий пристрій розпізнає зменшення радіуса кривизни западини або ж сідловини, то врахована додаткова висота знову вилучається. 3 UA 98900 C2 5 10 15 20 25 30 35 40 45 50 55 60 Безперервна реєстрація змін у висоті кістяків щитового кріплення дозволяє робити висновки про відповідно конвергенцію, що наступила, якщо на кістяку щитового кріплення під час роботи струга, тобто при стоячому щитовому кріпленні, визначається втрата висоти. Таким чином, відповідно до одного прикладу здійснення винаходу передбачено, що за допомогою реєстрації висоти кістяків щитового кріплення, що відбувається, як від ходу до ходу струга, так і при простої вибою, визначається відповідно наступаюча конвергенція й безупинно враховується за допомогою адаптації приваблюваної для установки кута поздовжнього нахилу горизонтом струга величини різниці висот. Втрата висоти, що відбулася, повинна бути знову компенсована за допомогою збільшення кута поздовжнього нахилу для досягнення або ж збереження заданої висоти вибою й, тим самим, за допомогою збільшення встановленою роботою струга планової висоти або ж фактичної висоти. При цьому може бути також передбачено, що для періодів простою діючого вибою у визначення величини різниці висот залучається очікувана конвергенція. Так, наприклад, перед кінцем тижня ширина призабійного простору може бути цілеспрямовано збільшена за допомогою збільшення кута поздовжнього нахилу й, тим самим, збільшення величини різниці висот для того, щоб, незважаючи на наступаючу наприкінці тижня конвергенцію, до початку тижня у розпорядженні була задана висота вибою для поновлення вибою. Якщо у рамках виробничих простоїв виникають, наприклад, підйоми підошви, які також ведуть до зменшення висоти вибою, такі підйоми підошви приводять до зміни положення забійного конвеєра також і при його простої, які розпізнаються системою керування й при простої роботи струга або ж видачі на-гора. Відповідно до цього, один приклад здійснення винаходу передбачає, що при виникаючому під час простою вибою підйомі підошви реєструється зміна нахилу забійного конвеєра при простої струга, і перед початком роботи струга заново розраховується кут поздовжнього нахилу, що вимагається для досягнення заданої висоти вибою. Відповідно до одного прикладу здійснення винаходу передбачено, що безліч кістяків щитового кріплення й стосовних до них циліндрів стрілоподібного виконавчого органа системи керування стрілоподібним виконавчим органом об'єднані у керовану системою автоматичного контролю груп групу. Тому що кожний кістяк щитового кріплення має різний настроювальний допуск при настроюванні встановлених на ній датчиків нахилу, повністю паралельне механічне вирівнювання датчиків нахилу щодо кістяка щитового кріплення неможливе. Залежно від якості при механічній основній вивірці датчиків нахилу на окремому кістяку щитового кріплення можуть виникати помилки при визначенні кута поздовжнього нахилу як різниці між нахилом перекриття покрівлі пласта й нахилом забійного конвеєра. Для мінімізації подібних помилок відповідно до одного прикладу здійснення винаходу передбачено, що для кожного окремого кістяка щитового кріплення у межах групи визначається кут поздовжнього нахилу для відповідного циліндра стрілоподібного виконавчого органа, і з окремих кутів поздовжнього нахилу стосовних до групи кістяків щитового кріплення утвориться середня величина, і у системі автоматичного контролю груп установлюється відповідний середній величині кут поздовжнього нахилу. Як торсіонний захист від перевантаження відповідно з'єднаних один із одним лотків забійного конвеєра може бути передбачено, що у системах автоматичного контролю груп суміжними у вибої, з'єднаними засобами системи керування групами кістяків щитового кріплення діючі для суміжних груп кути поздовжнього нахилу погоджують один із одним таким чином, щоб для запобігання механічного перевантаження з'єднань наданих групі часткових секцій лотка забійного конвеєра не перевищуються попередньо встановлені максимальні різниці між діючими для суміжних груп кутів поздовжнього нахилу. За тією же причиною може бути передбачено, що в узгодження діючих для суміжних груп кутів поздовжнього нахилу між групами залучаються існуючі відмінності за висотою положення забійного конвеєра. За допомогою цього враховується максимально допустимий радіус вигину гілки забійного конвеєра навколо осі просування очисного вибою. Відповідно може бути передбачено, що існуючі між групами у напрямку розробки виступи й/або відступи при проходженні забійного конвеєра й кістяків щитового кріплення уздовж фронту очисних робіт залучаються в узгодження діючих для суміжних груп кутів поздовжнього нахилу, причому враховується максимально допустимий радіус вигину гілки конвеєра навколо вертикальної осі забійного встаткування. Для того, щоб зменшити або ж виключити взаємний вплив підрегулювання кута поздовжнього нахилу, що вимагається, при відомих обставинах, після кожного ходу струга, на окремих рамах щитового кріплення або ж спільно керованих групах кістяків щитового кріплення, відповідно до одного прикладу здійснення винаходу передбачено, що кероване 4 UA 98900 C2 5 10 15 20 25 30 35 40 45 50 55 обчислювальним пристроєм підрегулювання кута поздовжнього нахилу при кожному ході струга відбувається винятково й однократно слідом за проходом струга й завершенням процесу пересування кістяків щитового кріплення. Щодо вимоги розташування забійного конвеєра як важливого параметра для встановлення або ж перевірки кута поздовжнього нахилу в якості різницевого кута між нахилом перекриття покрівлі пласта кістяків щитового кріплення й нахилом забійного конвеєра у напрямку розробки за першим прикладом здійснення винаходу передбачено, що групі пов'язаних один із одним за допомогою системи автоматичного контролю груп кістяків щитового кріплення наданий центральний, установлений на забійному конвеєрі датчик нахилу. Як альтернатива може бути передбачено, що у межах групи пов'язаних один із одним за допомогою системи керування кріплення кістяків щитового кріплення відповідно встановлено безліч розташованих на окремих лотках забійного конвеєра датчиків нахилу. Для визначення нахилу забійного конвеєра у напрямку розробки відповідно до одного прикладу здійснення винаходу може бути достатньо одного встановленого на забійному конвеєрі датчика нахилу. Для поліпшення якості вимірювання може бути передбачено, що встановлений на забійному конвеєрі блок датчиків нахилу виконаний у вигляді маючого два датчики нахилу однакової конструкції здвоєного датчика. З цим пов'язана та перевага, що обидва датчики взаємно перевіряють точність показання у межах поля вірогідності й при відхиленнях за межі діапазону допуску можуть видавати сигнал помилки щодо точності показання, за рахунок чого є розпізнаваним дрейф датчика. Ще одна перевага полягає у тому, що при відмові одного датчика другий датчик може продовжувати роботу, і система може формувати повідомлення про ушкодження. Крім того, точність реєстрації кута може бути поліпшена, якщо відповідно до одного прикладу здійснення встановлений на забійному конвеєрі блок датчиків нахилу складається з двох однакових, установлених із протилежним напрямком обертання навколо вимірювальної осі. Система з двох протилежних за напрямком обертання навколо вимірювальної осі однакових датчиків у диференціальному включенні може бути використана для компенсації обумовлених коливаннями (обертальних) помилок датчиків і значно демпфірувати індикацію результатів вимірів без втрати точності. Середній фактичний кут забійного конвеєра, на який забійний конвеєр коливається, може бути відображений у значній мірі звільненим від крутильних коливань, тому що обидва датчики коливаються з однаковою частотою й амплітудою, і при протилежній оцінці методом інтерференції компенсується перекрита коливанням частка сигналу, так що кут індикації у значній мірі залишається як при системі у стані спокою. Якщо у рамках автоматичного контролю груп кістяків щитового кріплення й відповідних циліндрів стрілоподібного виконавчого органа використовуваної системи керування стрілоподібним виконавчим органом підключені до вузла гідравлічного постачання й керування гідравлічні циліндри перебувають у з'єднанні між собою, може виникати такий ефект, що при проходженні струга забійний конвеєр притискається до відповідного кістяка щитового кріплення. Як реакція на пов'язане з цим витиснення гідравлічної рідини розташовані у напрямку руху перед стругом, що відносяться до однієї й тієї же системи автоматичного контролю груп гідравлічні циліндри можуть висуватися, у результаті чого можуть відбуватися небажані зміни у відповідному куті поздовжнього нахилу. Для запобігання таких реакцій може бути передбачено, що гідравлічні циліндри стрілоподібного виконавчого органа системи керування, які опираються між кістяками щитового кріплення й забійним конвеєром, за допомогою впливаючих окремо на їхні поршневі поверхні та їхні кільцеві поверхні гідравлічно зворотних клапанів, що відмикаються, після досягнення свого керованого положення виконані з можливістю гідравлічного блокування, при цьому зворотні клапани за допомогою наданих їм ліній керування з'єднані зі співвіднесеною системою автоматичного контролю груп. У рамках таких окремо заблокованих гідравлічних циліндрів час від часу може знадобитися зробити синхронізацію циліндрів стрілоподібного виконавчого органа, і для цього, відповідно до однієї пропозиції, всі циліндри стрілоподібного виконавчого органа переміщаються до кінцевого упору, і після цього встановлюється необхідний у відповідному положенні у вибої забійного конвеєра й установленого на ньому струга кут поздовжнього нахилу. Далі винахід розглядається ще раз на основі креслення в окремих аспектах. Показано на: Фіг. 1: забійне встаткування зі задаючим рух струга на занурення кутом поздовжнього нахилу у схематичному вигляді збоку, Фіг. 1A: крива розвитку висоти у вибої при використанні забійного встаткування згідно фіг. 1 під час маючого безліч ходів струга циклу регулювання, 5 UA 98900 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 2: у схематичному зображенні відношення встановлених на системі керування стрілоподібним виконавчим органом кутів поздовжнього нахилу у відношенні до кута поздовжнього нахилу, що фактично встановлюється, при твердому, що має більшу твердість, ніж вугілля, грунті пласта, Фіг. 2А: об'єкт фігури 2 в іншому способі зображення, Фіг. 2Б: об'єкт фігури 2 з урахуванням впливу положення розпорюваного різця, Фіг. 3: об'єкт фігури 2 при м'якому, що має меншу твердість, ніж вугілля, грунті пласта, Фіг. 3А: об'єкт фігури 3 у зображенні відповідно до фігури 2А, Фіг. 4А: поводження системи керування стрілоподібним виконавчим органом у межах автоматичного контролю груп без окремого блокування циліндрів стрілоподібного виконавчого органа, Фіг. 4Б: об'єкт фігури 4А при окремому блокуванні циліндрів стрілоподібного виконавчого органа, Фіг. 5: підлягаючий установці в автоматичній системі керування рівнем хід процесу у схематичному зображенні. Схематично зображене на фіг. 1 забійне встаткування має, насамперед, кістяк 10 щитового кріплення з перекриттям 11 покрівлі пласта й опорним полозом 12; між опорним полозом 12 і перекриттям 11 покрівлі пласта паралельно встановлені дві стійки 13,3 яких на фіг. 1 видна тільки одна. У той час як перекриття 11 покрівлі пласта на її передньому (лівому) кінці виступає у напрямку добувної машини, на задньому (правому) кінці перекриття 11 покрівлі пласта шарнірно встановлений завальний щит 14. Конструкція такого кістяка 10 щитового кріплення відома, так що вона більше детально не пояснюється. Щонайменше, на її перекритті 11 покрівлі пласта встановлений датчик 15 нахилу. Як далі не показано, на кістяку 10 щитового кріплення встановлені додаткові датчики нахилу на опорному полозі 12 і на завальному щиті 14 і/або на несучих завальний щит 14 приводних важелях. За допомогою зареєстрованих датчиками нахилу результатів вимірів може бути розрахована висота стійки щитового кріплення між перекриттям 11 покрівлі пласта й опорним полозом 12. На кістяку 10 щитового кріплення закріплений забійний конвеєр 16, який на його зверненій до не показаного більше докладно вибою (лівій) стороні має напрямну 18 струга з установленим на ній стругом 17. Забійний конвеєр 16 із установленим на ньому стругом 17 установлений з можливістю повороту щодо кістяка 10 щитового кріплення за допомогою циліндра 19 стрілоподібного виконавчого органа. На зображеному на фіг. 1 прикладі здійснення забійний конвеєр 16 зі стругом 17 повернутий у напрямку руху на занурення, а саме, з установленим за допомогою циліндра 19 стрілоподібного виконавчого органа кутом 20 поздовжнього нахилу, що являє собою різницевий кут між положенням перекриття 11 покрівлі пласта кістяка 10 щитового кріплення й нахилом забійного конвеєра 16 у напрямку розробки. Для цього відповідний нахил забійного конвеєра 16 у напрямку розробки може бути зареєстрований або ж визначений за допомогою встановленого на забійному конвеєрі 16 датчика 15 нахилу. Як у зв'язку з цим випливає з фігури 1A зі зображенням 17 ходів струга у рамках одного циклу регулювання, з кожним ходом струга досягається прийнята постійною глибина 21 різання, а саме, для кожної роботи 22 машини знизу нагору й для кожного руху 23 під ухил. У зв'язку з установленим у зображеному прикладі здійснення на занурення, у другій половині циклу регулювання заданим зменшуваним кутом поздовжнього нахилу у наданому обчислювальному пристрої для кожного ходу 22, 23 струга визначається очікувана планова висота вибою або ж досяжна у розрахунку на хід струга планова різниця висот, яка за 17 ходів струга зображеного циклу регулювання нанесена у вигляді кривої 24. Відповідна перевірка фактично досягнутої фактичної висоти вибою веде до зміни, нанесеної у вигляді кривої 25. Відповідно до цього посилального позначення 26 позначена величина різниці висот, що повинна бути вирізана для того, щоб досягти бажаної заданої висоти вибою. Величина 27 відповідає фактично вільно вирізаній різниці висот у фактичній висоті вибою, так що величина 28 різниці висот є розпізнаваною або ж обумовленою обчислювальним пристроєм як величина відмінності між величинами 26 і 27. Таким чином, оскільки для окремих робіт струга знизу нагору й рухів під ухил 22, 23 повинен бути встановлений кут 20 поздовжнього нахилу, кут поздовжнього нахилу повинен бути встановлений з урахуванням втрати висоти між плановою висотою й фактичною висотою більше на величину 28 різниці висот і настільки, щоб приріст 27 фактичної висоти відповідав в остаточному підсумку необхідному приросту 26 висоти. Це означає, що крива 24 для планової висоти, яку одержують з кута поздовжнього нахилу, повинна бути задана так, щоб крива 25 для фактичної висоти закінчувалася на величині необхідної різниці висот. Оскільки в обчислювальному пристрої інтегрований алгоритм самонавчання, система керування або ж обчислювальний пристрій у стані вивчити фактичне перетворення планової висоти у фактичну 6 UA 98900 C2 5 10 15 20 25 30 35 40 45 50 55 60 висоту й використовувати для розрахунку стратегії керування для наступних ходів струга. Для цього у добувних підприємствах, які починають роботу знову, спочатку повинно бути виконане просування очисного вибою приблизно у 20 м з ручним керуванням рівнем струга, в якому система керування пасивно вивчає характеристики керування для відповідного вибою. Слідом за цим може бути задіяна автоматична система керування рівнем струга, яка у ході подальшого просування очисного вибою продовжує вивчати характеристики керування й безупинно оптимізує стратегію керування. Перетворення кута 20 поздовжнього нахилу у різницю висот вибою для встановлення або ж підтримки заданої висоти вибою залежить від умов бічної породи, насамперед, у ґрунті пласта, тому що покрівля пласта повинна залишатися по можливості недоторканою, оскільки вона утворює напрямний горизонт для щитового кріплення. Якщо ґрунт пласта м'якший, ніж підлягаюче видобутку вугілля, дотримання заданої висоти вибою дуже важке, тому що струг без напрямного горизонту повинен керуватися, так сказати, "плаваючим чином" у діапазоні заданої висоти. Це вимагає частих керуючих втручань, тому що система струг-конвеєр постійно виходить з цільового горизонту, так що постійно доводиться робити підрегулювання. Ця нестабільна рівновага при керуванні технологічно обумовлює великий діапазон коливань висоти вибою, що несе у собі ризики захоплення порожньої породи, залишення пачки вугілля під покрівлею й покидання діапазону регулювання кріплення. Якщо грунт пласта твердіший, ніж вугілля, то горизонт ґрунту пласта може бути залучений як напрямна площина для роботи струга, у змісті роботи струга у граничному шарі. Твердий грунт пласта означає, що, незважаючи на встановлений на занурення кут поздовжнього нахилу, струг спочатку не врізається у ґрунт пласта, і при цьому, незважаючи на планову висоту, яку одержують з установки кута поздовжнього нахилу, у розрахунку на хід струга не відбувається зміни фактичної висоти. Ґрунт пласта, так сказати, відбиває керовані рухи струга, через що зазначений діапазон для кута поздовжнього нахилу може бути названий діапазоном відбиття. Цей діапазон відбиття щодо встановленого кута поздовжнього нахилу простягається від нижньої межі, що відзначає граничну лінію для підйому струга, до верхньої межі, при перевищенні якої у зв'язку з установленим кутом поздовжнього нахилу струг переборює опір ґрунту пласта, врізається у ґрунт пласта й тим самим виконує ефективний рух на занурення. Ці діапазони зображені на фіг. 2, права половина, як приклад, з діючим для відповідно діючого кута поздовжнього нахилу діапазоном 30 занурення, діапазоном 31 відбиття й діапазоном 32 підйому. Як уже було зазначено, досягнутий у розрахунку на фактичну висоту кожного ходу струга, фактично діючий кут поздовжнього нахилу відхиляється від установленого кута поздовжнього нахилу, як це показано на фіг. 2, ліва половина. При цьому при діючому куті поздовжнього нахилу майже повністю відпадає діапазон відбиття, незважаючи на встановлений у діапазоні відбиття кут поздовжнього нахилу, тому що установлені у діапазоні відбиття кути поздовжнього нахилу не приводять до відмінності за фактичною висотою. Відповідні умови також видні згідно фіг. 2А з відображеною на ній характеристикою 33 керування. При встановленому між +3 гон й -3 гон куті поздовжнього нахилу зміни діючого кута поздовжнього нахилу не відбувається; при цьому стратегія керування виходить з того, що кут поздовжнього нахилу при розпізнанні діапазону відбиття під час роботи струга встановлюється системою керування або ж обчислювальним пристроєм у середині діапазону відбиття, особливо щоб мати досить свободи для коливань при перетворенні встановленого кута поздовжнього нахилу у машинну техніку, без того, що покидають діапазон відбиття, а струг ефективно виконував небажані похилі рухи. На фіг. 2Б зображені випливаючі з фіг. 2А умови з урахуванням установлюваної на розпорюваному різці струга тенденції занурення або ж тенденції підйому. Як показує штрихова лінія 34 для характеристики керування, характеристика керування для занурення струга стає тим більше пологою, чим слабкіше встановлена за допомогою розпорюваного різця струга основна тенденція занурення, і чим пізніше може бути початий ефективний рух на занурення. До діапазону підйому відноситься відповідне. Чим слабкіше встановлена основна тенденція занурення, яка встановлена за допомогою розпорюваного різця, тим крутіше проходить штрихова характеристика 34 керування у діапазоні підйому для підйому, і тим раніше може бути початий рух струга на підйом. На фігурах 3 і 3А зображені умови відповідно до фігури 2, а також 2А для випадку застосування, коли ґрунт пласта м'якший, ніж підлягаюче видобутку вугілля. У цьому випадку відсутній утворений ґрунтом пласта напрямний горизонт, так що струг безпосередньо відповідає установці кута поздовжнього нахилу. При цьому відсутній діапазон відбиття (фігура 3), і відбувається безперехідна зміна між підйомом струга й зануренням струга (фіг. 3А). Оскільки 7 UA 98900 C2 5 10 15 20 25 30 цей перехід на фіг. 3А представлений величиною +2 гон, у цьому виражається встановлена на розпорюваному різці струга тенденція занурення. На фігурах 4А, 4Б видно вплив виконання циліндрів стрілоподібного виконавчого органа. Як випливає з фіг. 4А, при з'єднаних між собою циліндрах 35 стрілоподібного виконавчого органа може наступити такий ефект, що при проходженні струга забійний конвеєр притискається до відповідного кістяка щитового кріплення, так що з розташованих в області проходження струга циліндрів 35 стрілоподібного виконавчого органа витісняється гідравлічна рідина. Витиснута там гідравлічна рідина може текти до розташованого у напрямку руху перед стругом, що належить до однієї й тієї же системи автоматичного контролю груп циліндрам 35 стрілоподібного виконавчого органа й там забезпечувати висування циліндрів стрілоподібного .. виконавчого органа, з чим, однак, одночасно пов'язана зміна кута поздовжнього нахилу у цьому діапазоні. Для запобігання таких реакцій, може бути передбачено, що циліндри 35 стрілоподібного виконавчого органа забезпечені відповідно одним окремим блокуванням, так що циліндри 35 стрілоподібного виконавчого органа після досягнення свого керуючого положення виконані з можливістю гідравлічного блокування. Як випливає з фіг. 4Б, проходження струга циліндри 35 стрілоподібного виконавчого органа не зачіпає. Нарешті, як випливає з фіг. 5, для мінімізації взаємного впливу суміжних керованих груп кістяків щитового кріплення може бути активована наступна за стругом послідовність керування, при якій щитове кріплення після проходження струга спочатку планомірно дозовано пересувається. Після завершення процесу пересування окремі керовані групи кістяків щитового кріплення один за одним послідовно одержують завдання на керування встановити кут поздовжнього нахилу для наступного проходу струга й після цього більше не робити підрегулювання. Тим самим допускається можливий вплив однієї керуючої групи за рахунок наступної керуючої групи. Виникаючі при цьому відхилення за кутом поздовжнього нахилу залучаються обчислювальним пристроєм у майбутню стратегію керування, кут поздовжнього нахилу якої, однак, установлюється лише після наступного проходу струга. На основі такої стратегії керуюча хвиля проходить через вибій, слідуючи за стругом. Надійно запобігається нестабільне регулювання у результаті впливів зворотнього зв'язку суміжних керуючих груп одна на одну. Розкриті у вищенаведеному описі, формулі винаходу, рефераті й кресленні ознаки предмета цієї заявки можуть окремо, а також у будь-яких комбінаціях бути істотними для здійснення винаходу в його різних варіантах здійснення. ФОРМУЛА ВИНАХОДУ 35 40 45 50 55 60 1. Спосіб установки автоматичної системи керування рівнем струга (17) в обладнаних гідравлічним щитовим кріпленням і напрямним стругом (17) на виконаній на ньому напрямній (18) струга і забійним конвеєром (16) діючих очисних вибоях у підземному видобутку кам'яного вугілля, при цьому забійний конвеєр (16), включаючи струг, що направляється на ньому, (17), виконаний з можливістю зміни його положення у напрямку розробки за допомогою системи керування стрілоподібним виконавчим органом, що опирається на щитове кріплення, і за допомогою системи керування стрілоподібним виконавчим органом є встановлюваним кут (20) поздовжнього нахилу для установки руху струга (17) у напрямку розробки у вигляді руху на підйом, руху на занурення або нейтрального руху, при цьому для кожного ходу струга глибину (21) різання й кут (20) поздовжнього нахилу, який одержують як різницевий кут між нахилом перекриття (11) покрівлі пласта кістяка (10) щитового кріплення й нахилом забійного конвеєра (16) у напрямку розробки, реєструють, і в обчислювальному пристрої наступну з цього зміну висоти вибою на хід струга розраховують таким чином, що в обчислювальному пристрої з кожним відповідним одному ходу струга положенням забійного конвеєра (16) у вибої співвідносять висоту вибою як планову висоту, і при цьому при досягненні відповідного положення у вибої наступним за стругом (17) із затримкою у часі кістяком (10) щитового кріплення розраховують фактичну висоту вибою на основі знятих установленими на кістяку (10) щитового кріплення датчиками (15) нахилу величин і порівнюють зі збереженою у пам'яті плановою висотою, і при цьому визначена для відповідного положення у вибої величина (28) різниці висот між плановою висотою й фактичною висотою при наступних ходах струга враховується як ефект самонавчання обчислювальним пристроєм при заданні підлягаючого установці для досягнення планової висоти вибою кута (20) поздовжнього нахилу для струга (17). 2. Спосіб за п. 1, у якому на основі підлягаючого установці для досягнення заданої висоти вибою за допомогою циклу регулювання кута (20) поздовжнього нахилу, що містить безліч ходів струга, в обчислювальному пристрої попередньо розраховують заданий нахил забійного 8 UA 98900 C2 5 10 15 20 25 30 35 40 45 50 55 конвеєра (16), що одержують у розрахунку на хід струга, у напрямку розробки й погоджують з вимірюваним у кожному положенні у вибої у розрахунку на хід струга за допомогою встановлених на забійному конвеєрі (16) датчиків (15) нахилу фактичним нахилом забійного конвеєра (16), при цьому при встановлених відхиленнях факультативно коректують діючий для наступного ходу струга кут (20) поздовжнього нахилу. 3. Спосіб за одним з пп. 1 або 2, у якому відповідно заданий обчислювальним пристроєм кут (20) поздовжнього нахилу співвідносять з величиною (28) різниці висот, яку одержують у розрахунку на хід струга, і зберігають в обчислювальному пристрої певні у рамках ефекту самонавчання граничні кути поздовжнього нахилу діапазону (31) відбиття, у межах якого відповідно діючі, у тому числі й різні, кути поздовжнього нахилу не роблять змін висоти вибою. 4. Спосіб за п. 3, у якому при установці необхідного для досягнення заданої висоти вибою, що приводить до руху на підйом або руху на занурення струга, (17) кута (20) поздовжнього нахилу враховують величину відповідно діючого діапазону (31) відбиття, і кут (20) поздовжнього нахилу для здійснення руху на підйом або руху на занурення встановлюють на величину, що знаходиться поза діапазоном (31) відбиття. 5. Спосіб за одним із пп. 1-4, у якому при зміні положення розпорювального різця струга стосовно до тенденції занурення, тенденції підйому або нейтрального руху струга на обчислювальний пристрій передають інформацію про змінене положення розпорювального різця. 6. Спосіб за п. 5, у якому в обчислювальному пристрої запитують придатну для встановленого положення розпорювального різця, вивчену на пройденій очисній виїмці характеристику для співвідношення кута поздовжнього нахилу й величини різниці висот. 7. Спосіб за одним із пп. 1-6, у якому за допомогою визначення нахилу перекриття (11) покрівлі пласта кістяків (10) щитового кріплення у напрямку розробки розпізнають обрис западини й/або сідловини у напрямку розробки, і в обчислювальному пристрої встановлюють адаптацію сліду різу струга (17) паралельно обрису покрівлі пласта, і за допомогою адаптації кута (20) поздовжнього нахилу системи керування рівнем струга встановлюють адаптовану задану висоту вибою, що включає у себе відповідну радіусу кривизни западини або ж сідловини додаткову висоту. 8. Спосіб за одним із пп. 1-7, у якому за допомогою триваючої як від ходу струга до ходу струга, так і при простої вибою реєстрації висоти кістяків (10) щитового кріплення визначають відповідно наступну конвергенцію, і постійно враховують за допомогою адаптації підлягаючу залученню для установки кута (20) поздовжнього нахилу системи керування рівнем струга величину (28) різниці висот. 9. Спосіб за п. 8, у якому для періодів простою діючого очисного вибою у визначення величини (28) різниці висот залучають очікувану конвергенцію. 10. Спосіб за одним з пп. 8 або 9, у якому при виниклому під час простою вибою підйомі підошви реєструють зміну нахилу забійного конвеєра (16) при простої струга (17), і перед початком роботи струга знову розраховують необхідний для досягнення заданої висоти вибою кут (20) поздовжнього нахилу. 11. Спосіб за одним із пп. 1-10, у якому безліч кістяків (10) щитового кріплення й стосовних до них циліндрів (35) стрілоподібного виконавчого органа об'єднані у групу, керовану системою автоматичного контролю груп. 12. Спосіб за п. 11, у якому для кожного окремого кістяка (10) щитового кріплення у межах однієї групи визначають кут (20) поздовжнього нахилу для відповідного циліндра (35) стрілоподібного виконавчого органа, і з окремих кутів поздовжнього нахилу стосовних до групи кістяків (10) щитового кріплення утворюють середню величину, і у системі автоматичного контролю груп установлюють кут (20) поздовжнього нахилу, що відповідає середній величині. 13. Спосіб за одним з пп. 11 або 12, у якому у системах автоматичного контролю груп суміжних у вибої, з'єднаних засобами системи керування груп кістяків (10) щитового кріплення діючі для суміжних груп кути (20) поздовжнього нахилу погоджують один із одним таким чином, щоб для запобігання механічному перевантаження з'єднань співвіднесених із групами часткових секцій лотка забійного конвеєра (16) не перевищувалися попередньо встановлені максимальні різниці між діючими для суміжних груп кутами (20) поздовжнього нахилу. 14. Спосіб за п. 13, у якому в узгодження діючих для суміжних груп кутів (20) поздовжнього нахилу залучають існуючі між групами відмінності за висотою у положенні забійного конвеєра (16). 15. Спосіб за одним з пп. 13 або 14, у якому існуючі між групами у напрямку розробки виступи й/або відступи при проходженні забійного конвеєра (16) і кістяків (10) щитового кріплення 9 UA 98900 C2 5 10 15 20 25 30 уздовж фронту очисних робіт залучають в узгодження діючих для суміжних груп кутів (20) поздовжнього нахилу. 16. Спосіб за одним із пп. 1-15, у якому кероване обчислювальним пристроєм підрегулювання кута (20) поздовжнього нахилу відбувається при кожному ході струга винятково й однократно слідом за проходом струга й завершенням процесу пересування кістяків (10) щитового кріплення. 17. Спосіб за одним із пп. 11-16, у якому з групою з'єднаних один із одним за допомогою системи автоматичного контролю груп кістяків щитового кріплення відповідно співвіднесений центральний, установлений на забійному конвеєрі (16) датчик (15) нахилу. 18. Спосіб за одним із пп. 11-16, у якому у межах групи з'єднаних один із одним за допомогою системи керування кріплення кістяків (10) щитового кріплення відповідно розташована безліч установлених на окремих лотках забійного конвеєра (16) датчиків нахилу. 19. Спосіб за одним із пп. 1-18, у якому нахил забійного конвеєра (16) вимірюють за допомогою встановленого на забійному конвеєрі (16) датчика (15) нахилу. 20. Спосіб за одним із пп. 1-19, у якому встановлений на забійному конвеєрі (16) блок датчиків нахилу виконаний у вигляді здвоєного датчика, що має два датчики нахилу однакової конструкції. 21. Спосіб за одним із пп. 1-19, у якому встановлений на забійному конвеєрі (16) блок датчиків нахилу складається з двох однакових, установлених з обертанням у протилежних напрямках навколо осі вимірювання датчиків. 22. Спосіб за одним із пп. 1-21, у якому гідравлічні циліндри (35) стрілоподібного виконавчого органа, що спираються між кістяками (10) щитового кріплення й забійним конвеєром (16), системи керування стрілоподібним виконавчим органом виконані з можливістю гідравлічного блокування за допомогою впливаючих окремо на їхні поршневі поверхні та їхні кільцеві поверхні гідравлічно деблокованих зворотних клапанів після досягнення їхнього керуючого положення, при цьому зворотні клапани за допомогою співвіднесених ліній керування з'єднані зі співвіднесеною системою автоматичного контролю груп. 23. Спосіб за п. 22, у якому через інтервали часу використовують синхронізацію циліндрів (35) стрілоподібного виконавчого органа за рахунок того, що всі циліндри (35) стрілоподібного виконавчого органа переміщають до кінцевого упору, а потім установлюють необхідний у відповідному положенні забійного конвеєра (16) у вибої й установленого на ньому струга (17) кут (20) поздовжнього нахилу. 10 UA 98900 C2 11 UA 98900 C2 Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for adjusting an automatic level control of the plane in planing operations in hard coal mining
Автори англійськоюJunker, Martin, Mozar, Armin
Назва патенту російськоюСпособ установки автоматической системы управления уровнем струга в струговых выемках угольной промышленности
Автори російськоюЮнкер Мартин, Моцар Армин
МПК / Мітки
МПК: E21D 23/03, E21C 35/24
Мітки: керування, вугільної, рівнем, системі, автоматичної, промисловості, виїмках, установки, струга, спосіб, стругових
Код посилання
<a href="https://ua.patents.su/14-98900-sposib-ustanovki-avtomatichno-sistemi-keruvannya-rivnem-struga-u-strugovikh-vimkakh-vugilno-promislovosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб установки автоматичної системи керування рівнем струга у стругових виїмках вугільної промисловості</a>
Пристрій контролю місцезнаходження струга та управління приводом стругової установки
Номер патенту: 7687
Опубліковано: 26.12.1995
Автори: Кібрик Ісаак Соломонович, Биковський Олександр Павлович, Голубчиков Олександр Митрофанович, Муфель Лев Абрамович, Шапошнік Василь Іванович
МПК: E21C 27/18
Мітки: приводом, пристрій, струга, установки, контролю, стругової, місцезнаходження, управління
Формула / Реферат:
Устройство контроля местонахождения струга и управления приводом струговой установки, содержащее датчик перемещения струга, соединенный через входной блок с реверсивным счетчиком, ко входам которого подключены, индикатор местонахождения струга и узел задания пределов реверсирования, блок оперативного управления, схему совпадения, блок управления приводом, подключенный к магнитному пускателю электропривода струга, отличающееся тем, что, .с...
Спосіб отримання паливних брикетів із відходів вугільної або деревообробної промисловості
Номер патенту: 50312
Опубліковано: 15.10.2002
Автори: Гордієнко Петро Валентинович, Павлюк Світлана Миколаївна, Процишин Борис Миколайович
МПК: C10L 5/00
Мітки: спосіб, промисловості, брикетів, відходів, вугільної, паливних, отримання, деревообробної
Формула / Реферат:
Спосіб отримання паливних брикетів із відходів вугільної або деревообробної промисловості, що включає добавлення до відходів при перемішуванні зв'язуючого, нагрітого вище температури його плавлення, сушіння, пресування і охолодження брикетів, який відрізняється тим, що використовують пилоподібні поганозаймисті відходи, як зв'язуюче застосовують відходи нафтопереробки - парафін або відпрацьоване машинне масло або їх композиції, у кількості...
Спосіб отримання паливних брикетів із відходів вугільної або деревообробної промисловості
Номер патенту: 50313
Опубліковано: 15.10.2002
Автори: Павлюк Світлана Миколаївна, Гордієнко Петро Валентинович, Процишин Борис Миколайович
МПК: C10L 5/00
Мітки: отримання, промисловості, брикетів, відходів, паливних, деревообробної, вугільної, спосіб
Формула / Реферат:
Спосіб отримання паливних брикетів із відходів вугільної або деревообробної промисловості, що включає добавлення до відходів при перемішуванні зв'язуючого, нагрітого вище температури його плавлення, пресування і охолодження брикетів, який відрізняється тим, що використовують пилоподібні поганозаймисті відходи з високою вологістю, як зв'язуюче застосовують відходи нафтопереробки - нафтовий шлам або петролатум або їх композиції, у кількості...
Гідрофікований стіл для приводної станції струга
Номер патенту: 37015
Опубліковано: 16.04.2001
Автори: Хижняк Микола Якович, Бушуйченко Олег Станіславович, Броневицький Володимир Юрійович
МПК: E21C 29/00
Мітки: приводної, стіл, станції, струга, гідрофікований
Текст:
...земника на кінцевій ділянці лави. З'єднання основи за допомогою шарнірних опор розміщених по боках балки, установленої нерухомо на поворотній осі, і шарнірної опори гідродомкрата підіймання, установленого шарнірно на поворотній траверсі, закріпленої, в свою чергу, нерухомо на поворотній осі, забезпечує стійке положення основи на турелі виключаючи тим самим перекидання приводної станції струга із забезпеченням нахилу її по куту падіння...
Напрямна для струга, зокрема похила напрямна для струга
Номер патенту: 27518
Опубліковано: 12.11.2007
Автори: Дунке Клаус, Зіпенкорт Герхард, Клабіш Адам, Хессе Норберт
МПК: E21C 35/12, E21C 27/32
Мітки: струга, напрямна, похила, зокрема
Формула / Реферат:
1. Напрямна для добувного струга, зокрема похила напрямна для струга ковзання, яка містить кутиковий сталевий лист (5), одна полиця (6) якого утворює поверхню ковзання струга, а інша, спрямована вверх полиця (5) якого виконана з можливістю розташування або розташована на секції жолоба конвеєра, щонайменше один розпірний елемент (11) ковзання, який над поверхнею ковзання струга відділяє верхній канал (25) для тягового ланцюга струга від...
Попередній патент: Спосіб отримання комплексу біологічно активних речовин з протизапальною та антимікробною дією з трави медунки темної
Наступний патент: Молоток дробарки карпенка
Випадковий патент: Комплекс активного захисту "заслон"