Самохідна робоча машина


Формула / Реферат
1. Самохідна робоча машина, що містить привідний двигун, редуктор (2) для ходової передачі і щонайменше одну допоміжну передачу (3, 4, 5) для приведення робочих агрегатів, при цьому потужність привідного двигуна розподіляється на ходову передачу і щонайменше на одну допоміжну передачу (3, 4, 5), вимірювальні пристрої (2А, 3А, 4А, 5А, 20А, 30А) для визначення щонайменше однієї величини, що обмежує потужність, у допоміжних передачах (3, 4, 5) та в ходовій передачі (2) і подачі сигналу, корелятивного останній, пристрій оцінки та керування (6) для отримання і обробки сигналів від вимірювальних пристроїв, а також для генерування керуючого сигналу як функції зазначених сигналів, регулятор потужності (1А) привідного двигуна для отримання згаданого керуючого сигналу і регулювання вихідної потужності двигуна приводу, при цьому у пристрої оцінки та керування (6) реєструються максимально допустимі обмежуючі потужність величини щонайменше для однієї з допоміжних передач (3, 4, 5) і ходової передачі (2), причому перевищення вже визначених обмежуючих величин щонайменше на одній з допоміжних передач (3, 4, 5) і/або на ходовій передачі (2) призводить до генерування керуючим програмним забезпеченням у пристрої оцінки та керування (6) керуючого сигналу (S) на зменшення вихідної потужності (РА) або числа обертів двигуна приводу (1), а при знятті критерію зменшення потужності вихідна потужність двигуна знов пристосовується до нових допустимих меж потужності.
2. Самохідна робоча машина за п.1, яка відрізняється тим, що керуючий сигнал (S) від пристрою оцінки та керування (6) не знижує, а підвищує вихідну потужність (РА) або число обертів двигуна приводу (1), якщо завдяки цьому всі допоміжні передачі (3, 4, 5) не виходять із зони допустимих значень потужності, а при знятті критерію підвищення потужності вихідна потужність двигуна приводу (1) знов регулюється.
3. Самохідна робоча машина за будь-яким з попередніх пунктів, яка відрізняється тим, що у пристрої оцінки та керування (6) реєструється як змінна величина щонайменше одна з максимально допустимих, обмежуючих потужність величин, наприклад обертальний момент, тиск або сила струму.
4. Самохідна робоча машина за будь-яким з попередніх пунктів, яка відрізняється тим, що у пристрої оцінки та керування (6) для допоміжних передач передбачені різні вагові коефіцієнти для визначення керуючого сигналу (S) для регулювання потужності двигуна приводу (1).
5. Самохідна робоча машина за п. 4, яка відрізняється тим, що у пристрої оцінки та керування (6) вагові коефіцієнти реєструються як змінні величини.
6. Самохідна робоча машина за будь-яким з попередніх пунктів, яка відрізняється тим, що додатково до обмежуючих потужність величин у відповідних допоміжних передачах (3, 4, 5) і в ходовій передачі (2) для регулювання потужності двигуна приводу (1) у пристрої оцінки та керування (6) використовується щонайменше ще один параметр (Z), обмежуючий режим роботи двигуна приводу (1), допоміжних передач (3, 4, 5) і/або ходової передачі (2).
7. Самохідна робоча машина за п. 6, яка відрізняється тим, що параметр (Z) утворений з інших експлуатаційних даних ходової передачі (2), іншого редуктора і/або щонайменше однієї з допоміжних передач (3, 4, 5).
8. Самохідна робоча машина, що містить привідний двигун, редуктор (2) для ходової передачі і щонайменше одну допоміжну передачу (3, 4, 5) для приведення робочих агрегатів, пристрій оцінки та керування (6) для генерування керуючого сигналу, регулятор потужності (1А) привідного двигуна, паливний насос, при цьому привідна потужність привідного двигуна розподіляється на ходову передачу і щонайменше на одну допоміжну передачу (3, 4, 5), а також безпосередньо керує роботою паливного насоса через регулятор потужності, який у випадку зміни споживаної потужності у ходовій передачі або щонайменше в одній із допоміжних передач отримує від пристрою оцінки та керування такий керуючий сигнал для паливного насоса, який пристосовує кількість уприскуваного палива і відповідно число обертів двигуна до нової споживаної потужності.
9. Самохідна робоча машина за п. 8, яка відрізняється тим, що додатково до вимірювальних пристроїв (2А, 3А, 4А, 5А, 20А, 30А) передбачений щонайменше один датчик для поточного визначення кількостей зібраної маси у потоці, що проходить через машину, причому сигнал цього датчика задає необхідну потужність певних допоміжних передач, яка оцінюється пристроєм оцінки та керування (1).
10. Самохідна робоча машина за п. 9, яка відрізняється тим, що датчик визначає кількості зібраної маси до досягнення робочим агрегатом обмежуючого потужність обертального моменту.
11. Самохідна робоча машина за п. 8, яка відрізняється тим, що регулятор потужності (1А) входить в електронну систему керування двигуном і по генерованому пристроєм оцінки та керування (6) керуючому сигналу (S) змінює потужність двигуна приводу за допомогою зміни характеристичної кривої двигуна або комутацією різних характеристичних кривих чи характеристичних полів, що зберігаються у системі керування двигуна.
12. Самохідна робоча машина за пп. 8-11, яка відрізняється тим, що вимірювальні пристрої (2А, 3А, 4А, 5А, 20А, 30А), пристрій оцінки та керування (6) або система керування двигуном інтегровані в електронну комунікаційну мережу, наприклад у шинну систему CAN.
13. Самохідна робоча машина за пп. 8-11, яка відрізняється тим, що утворена комбінацією тягового транспортного засобу і навісного або причіпного агрегата (22), причому робочі агрегати приводяться від тягового транспортного засобу або щонайменше від одного з допоміжних приводів (30), а обмежуючі потужність величини на окремих головній або допоміжних передачах (3, 4, 5) навісних чи причіпних робочих агрегатів (22) визначаються по керуючому сигналу (S) для регулятора потужності (1А).
Текст
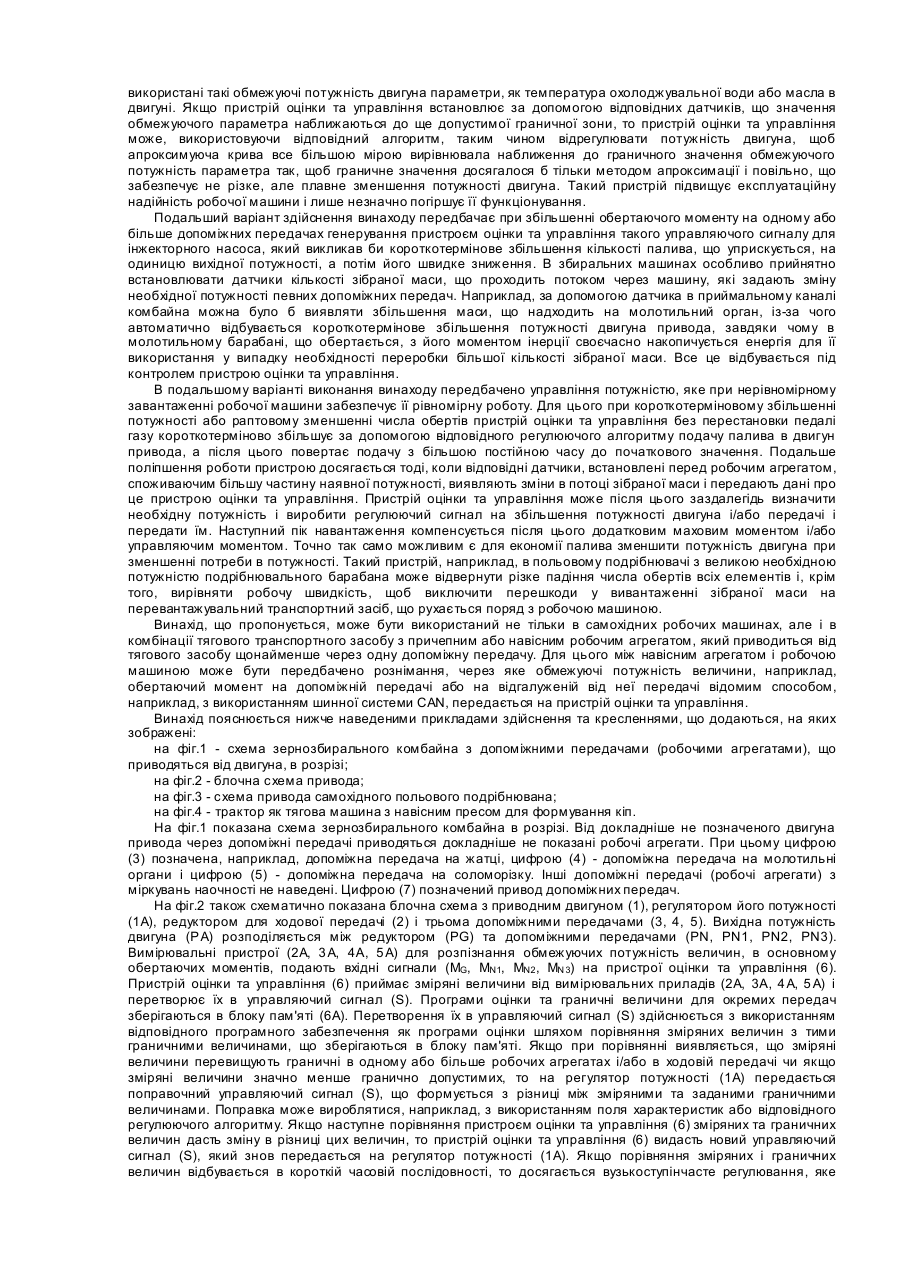
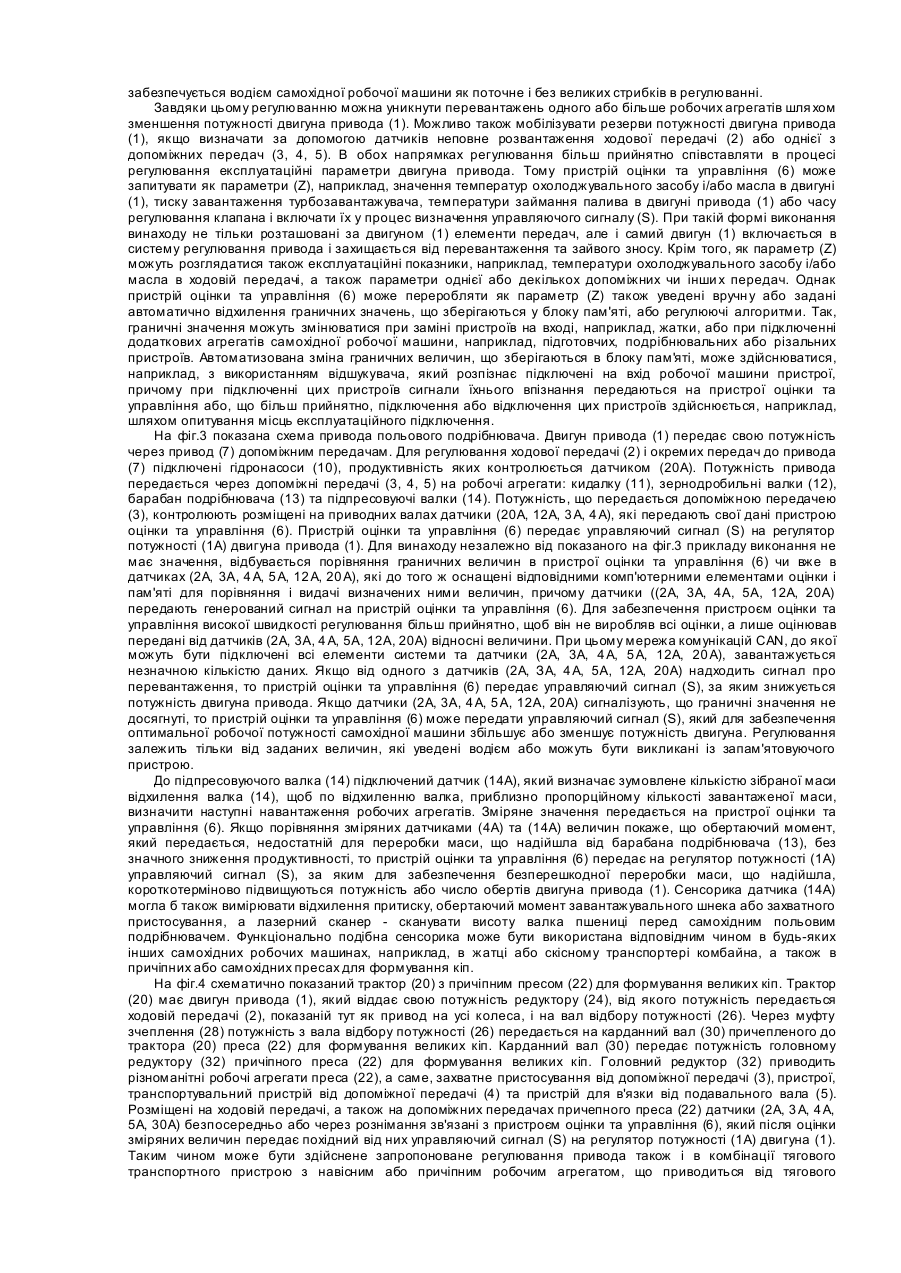
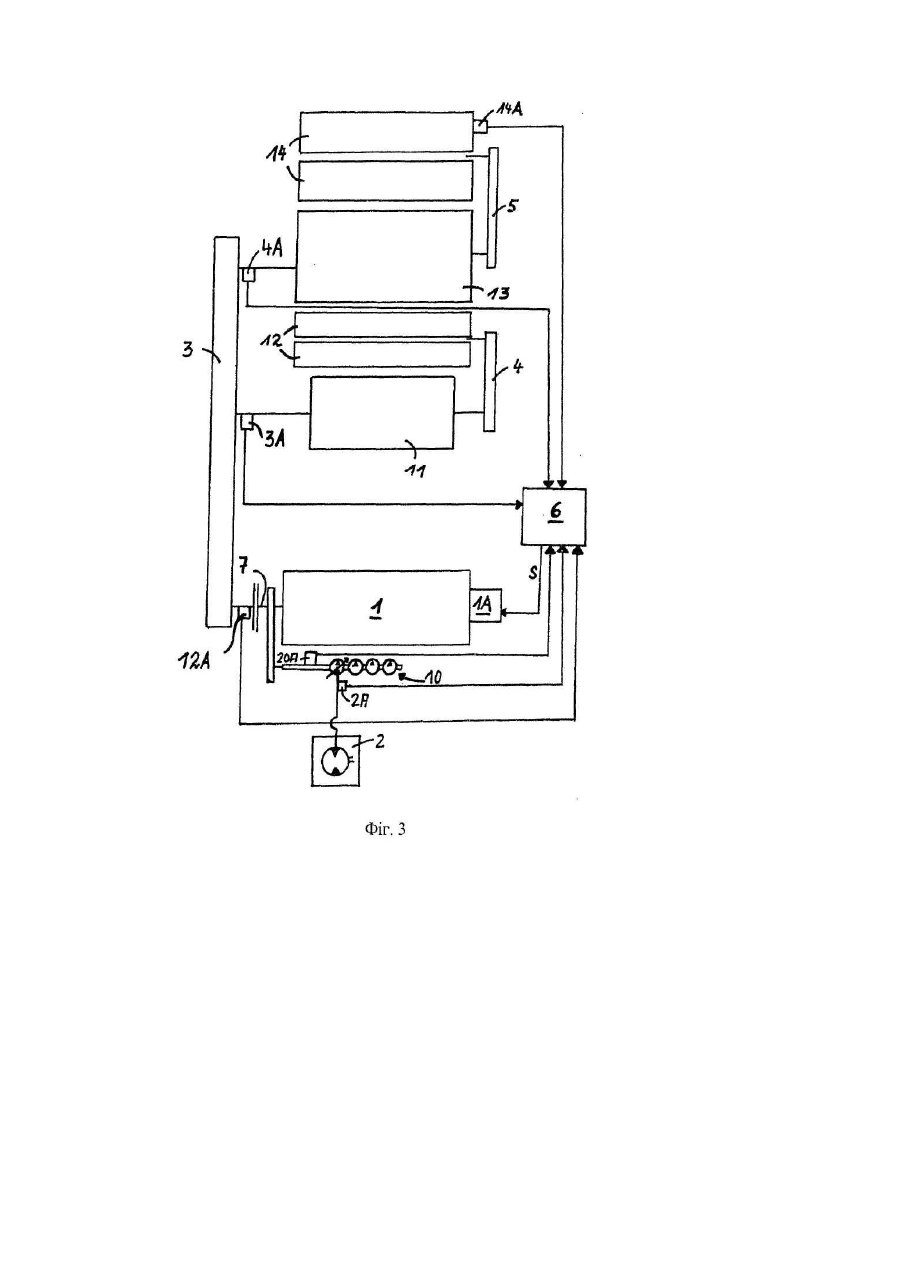
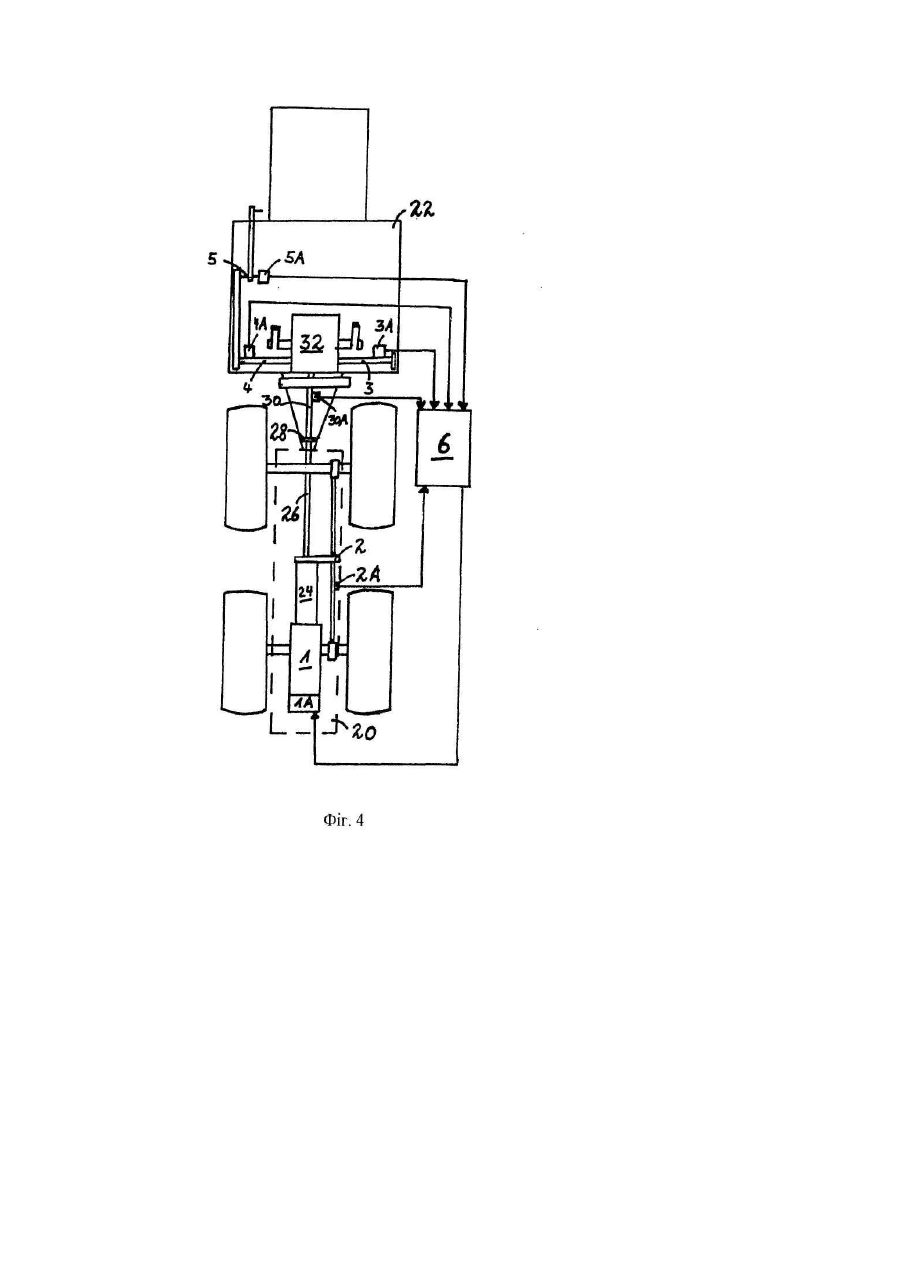
Винахід відноситься до самохідної робочої машини з приводним двигуном, потужність якого передається паралельно на ходову і щонайменше на одну допоміжну передачі, причому щонайменше один вимірювальний пристрій безпосередньо або побічно визначає віддану на допоміжну передачу потужність і при перевантаженні видає управляючий сигнал на регулятор потужності для регулювання вихідної потужності двигуна привода. Самохідними робочими машинами цього типу є, наприклад, такі сільськогосподарські машини, як зернозбиральні комбайни, польові подрібнювачі або трактори, а також будівельні машини. Так, самохідний зернозбиральний комбайн поряд з ходовою механічною передачею або розташованою за приводним двигуном гідравлічною передачею, від якої потужність гідравлічно передається на приводні колеса, має багато робочих агрегатів (жатку, молотильний та сепараторний органи, соломорізку, повітродувку, елеватор тощо), які як допоміжні механізми відбору потужності безпосередньо або побічно приводяться від вала двигуна привода. В самохідному подрібнювачі є допоміжні передачі для привода переднього агрегату, подрібнювального агрегату, кидалки та інших робочих агрегатів. Названі робочі агрегати частково приводяться паралельно один одному, частково послідовно один за одним. Як відомо, в тракторах поряд з ходовою передачею та гідронасосами передбачений так званий вал відбору потужності для привода додаткових робочих агрегатів. З міркувань економічності прагнуть приводити від двигуна привода трактора якомога більше додаткових робочих агрегатів, що приводить до наявності у багатьох тракторів двох валів відбору потужності (задній та передній вали відбору потужності). Деякі трактори вже мають декілька встановлених наверху валів відбору потужності для передачі потужності від двигуна привода до допоміжних агрегатів у верхній конструктивній зоні трактора. Для забезпечення можливості задоволення потреби в потужності цих робочих машин стосовно ходової та допоміжних передач механізмів потрібні все більш і більш високі вихідні потужності двигуна привода . Звичайно, окремі робочі агрегати та редуктор на ходовій передачі повинні бути конструктивно розраховані на максимальну вхідну потужність або обертаючий момент. При деяких експлуатаційних ситуаціях може трапитися, що двигун привода виробляє більший обертаючий момент, ніж можуть сприйняти допоміжні передачі чи окремі з них або редуктор, що може призвести до пошкодження або підвищеного спрацювання елементів передач, робочих агрегатів або редуктора. Зазначена проблема порушена в заявці ФРН №19624085 А1, в якій описана самохідна робоча машина у вигляді цементовоза, що має додатково до ходової передачі допоміжну передачу для цементомішалки, яка приводиться від двигуна привода. Для ходової передачі тут потрібний двигун, який був би здатний розвивати обертаючі моменти, значно перевищуючі максимально допустимий обертаючий момент цементомішалки. Цементовоз має в основному два експлуатаційних положення: а) транспортне з одночасною роботою цементомішалки і в) стаціонарне при роботі розчиномішалки. Тому в експлуатаційному положенні в), коли обертаючий момент повністю передається на цементомішалку, можливим є перевищення максимально допустимого для цементомішалки обертаючого моменту. Виходячи з цього, в заявці ФРН № 19624085 А1 запропоновано при досягненні максимально допустимого обертаючого моменту цементомішалки автоматично обмежувати обертаючий момент двигуна привода за допомогою регулятора потужності. Однак для забезпечення можливості автоматичного обмеження обертаючого моменту оператор повинен насамперед активізувати цей регулятор за допомогою перемикача. До того ж захист від перевантаження поширюється тільки на цементомішалку в стаціонарному положенні при непрацюючій ходовій передачі і не поширюється на ходову передачу. Захист ли ше цементомішалки обумовлює те, що запропонований контроль обертаючого моменту не чинить ніякого впливу на двигун привода. Однак в самохідних робочих машинах, особливо у згаданих вище сільгоспмашинах, проблеми складніше, оскільки, з одного боку, як правило, поряд з ходовою передачею в них Є велике число допоміжних передач з великою кількістю робочих агрегатів, а з іншого, число експлуатаційних положень, які потребують різних обертаючих моментів, тут більше, ніж у випадку цементовоза за заявкою ФРН №19624085 А1. При регулюванні двигуна привода бажано не тільки запобігати перевантаженню кожного окремого агрегату шляхом зниження потужності двигуна, але й так регулювати двигун привода, щоби максимальна потужність була достатньою для роботи самохідної машини і не викликала перевантаження робочих агрегатів під час їхньої роботи. Різноманітні експлуатаційні ситуації для комбайнів та пов'язані з ними постійно змінювані навантаження окремих агрегатів виникають, наприклад, при проїзді по полях з різною щільністю достиглого врожаю, при збиранні врожаю на пагорбах, при різному стані ґрунту, при транспортуванні тощо. При цьому нерідкісною є часта змінюваність експлуатаційних положень. При цьому зміна експлуатаційних положень може відбуватися з малими проміжками часу або навіть майже стрибкоподібно. В тракторах з кількома валами відбору потужності можуть одночасно працювати два або більше валів відбору потужності в залежності від того, які додаткові агрегати приєднані. До того ж тут можливою є велика кількість експлуатаційних положень. Завданням винаходу є таке вдосконалення самохідної робочої машини згідно з обмежувальною частиною п.1 формули, яке забезпечило б надійним та задовольняючим оператора чином оптимальну експлуатацію самохідної робочої машини в різноманітних експлуатаційних положеннях без надмірного перевантаження окремих допоміжних передач або ходової передачі. Вказане завдання відповідно до винаходу вирішується тим, що у допоміжних передачах та в ходовій передачі передбачаються самі по собі відомі вимірювальні пристрої для визначення щонайменше однієї обмежуючої потужність величини, а також пристрій оцінки та управління, який приймає як вхідні сигнали визначені вимірювальними пристроями величини у вигляді відомих перероблюваних сигналів, причому у пристрої оцінки та управління в залежності від цих сигналів генерується управляючий сигнал для регулятора потужності для регулювання вихідної потужності двигуна привода, при цьому в пристрої оцінки та управління зберігаються максимально допустимі обмежуючі потужність величини щонайменше для однієї допоміжної передачі та ходової передачі, а ці величини при перевищенні встановлених пристроєм оцінки та управління величин щонайменше на одній з допоміжних передач і/або на ходовій передачі виробляють за допомогою управляючих програмних засобів управляючий сигнал для зменшення вихідної потужності двигуна привода І при скасуванні критерію зменшення потужності вихідна потужність двигуна знов пристосовується до нових допустимих меж потужності. Для визначення обмежуючих потужність величин, наприклад, числа обертів, обертаючого моменту, тиску, напруги або сили струму, можуть бути використані відомі самі по собі вимірювальні пристрої. При цьому передбачено безпосереднє визначення обертаючих моментів відповідними датчиками на валах, передаючих потужність на ходову та допоміжні передачі. Замість безпосереднього визначення обертаючих моментів можуть бути використані також відображаючі навантаження на окремі елементи побічні методи вимірювань, відомі фахівцю як взаємозамінні. У випадку гідравлічної передачі це можуть бути, наприклад, датчики тиску та витрати гідравлічної рідини. У допоміжних ремінних передачах обертаючий момент можна побічно визначати, наприклад, з використанням відповідних пристроїв для визначення пробуксовки ременя. Далі, потужність в лінії привода можуть відображати траєкторії установочних важелів, відхилення натяжних пристроїв ремінних та ланцюгових передач або відхилення величини струму в двигуні привода. Управляючий сигнал для регулювання потужності S є функцією різних обмежуючих потужність величин, наприклад, функцією окремих обертаючих моментів: S=f (ΜG ,ΜN1, ΜN 2, МN3 , …), де MG означає обертаючий момент на ходовій передачі, а МN1 - обертаючий момент на і-тій допоміжній передачі. Відповідна програма в пристрої оцінки та управління, який являє собою переважно мікропроцесор з відповідним програмним забезпеченням, може оцінювати вхідні сигнали за різними критеріями і зв'язувати їх один з одним. Таким чином, вперше стало можливим адекватне автоматичне управління потужністю в самохідних робочих машинах, в яких поряд з ходовою передачею передбачено декілька передач від одного двигуна та які мають охоплювати широкий спектр експлуатаційних положень з різними необхідними потужностями в різноманітних допоміжних передачах та в ходовій передачі. Потужність двигуна привода в залежності від ситуації можна регулювати автоматично, зменшуючи її або підвищуючи у міру потреби, завдяки чому вона залишається й допустимих межах і кожного разу відбувається нове пристосування вже встановленої потужності двигуна на актуальні експлуатаційних умови. Автоматизоване регулювання потужності двигуна привода підвищує зручність обслуговування, тому що водій позбавляється необхідності втручатися в процес регулювання. В згаданих вище самохідних робочих машинах як приводні двигуни використовуються переважно дизельні двигуни, оснащені переважно електронно керованими інжекторними насосами для регулювання потужності. Кількість палива, що уприскується інжекторним насосом в камери згоряння, можна регулювати звичайним чином через управляючий сигнал на інжекторний насос, що безпосередньо впливає на потужність двигуна привода. За одним з варіантів виконання винаходу в пристрої оцінки та управління накопичуються значення максимально допустимого обертаючого моменту для кожної з допоміжних передач та ходової передачі. Завдяки цьому при перевищенні визначеним пристроєм оцінки та управління обертаючим моментом допустимого для допоміжної або ходової передачі значення обертаючого моменту пристрій оцінки та управління генерує управляючий сигнал на зменшення вихідної потужності двигуна, завдяки чому запобігають пошкодженню цих передач. Зазначений тип «контролю та управління перевантаженням» виключає необхідність в інформуванні оператора самохідної робочої машини про те, які з передач працюють в даний момент та які граничні навантаження вони можуть витримати. В розвиток або доповнення винаходу запропоноване вимірювання обертаючих моментів, тиску або напруги може запобігти перевантаження двигуна за потужністю через управляючий сигнал, коли пристрій оцінки та управління за допомогою даних вимірювань виявляє, що щонайменше один з робочих агрегатів або ходова передача не перевантажуються при короткотерміновій додатковій потужності двигуна привода або коли повинні бути підключені додаткові робочі агрегати, що має місце, наприклад, тоді, коли всі або деякі допоміжні передачі і/або ходова передача працюють в заданому діапазоні обертаючих моментів, який не переступається також і після збільшення потужності. Так, наприклад, при використанні комбайна для збирання врожаю на схилах та підйомах при працюючій молотарці вихідна потужність двигуна без небезпеки пошкодження ходової передачі може збільшуватися понад номінальне значення, яке означало б перевантаження ходової передачі при транспортному положенні машини без підключення додаткових робочих агрегатів. Особлива перевага досягається тоді, коли максимально допустимі обертаючі моменти окремих побічних передач можна зберігати у вигляді змінних величин. Так, наприклад, на тракторі з декількома валами відбору потужності можна підключати і одночасно приводити найрізноманітніші додаткові агрегати без загрози перевантаження будь-якого з них. Оператор повинен лише вводити в комп'ютер значення максимально допустимих обертаючих моментів в залежності від підключених додаткових агрегатів, що можна здійснювати шляхом ручного уведення даних або ж шляхом простого вибору відповідного додаткового агрегату (косарки, корчувача) з переліку додаткових агрегатів, що зберігається в центральному комп'ютері робочої машини, в якому накопичені відповідні граничні значення, завдяки чому досягаються найвища гнучкість та надійність. Наступний варіант здійснення винаходу передбачає наявність в пристрої оцінки та управління різних вагових коефіцієнтів (XI, Х2, Х3) для допоміжних передач, щоб визначати управляючий сигнал S на регулювання потужності двигуна привода: S=f (MG, X1*MN1, X2*MN 2, X3*MN3 ,...). Більш прийнятно вагові коефіцієнти можуть зберігатися у вигляді змінних величин. Завдяки цьому можуть бути вибрані домінуючі споживачі потужності та встановлені пріоритети в управлінні потужністю. Наступний варіант здійснення винаходу передбачає використання в пристрої оцінки та управління додатково до обертаючих моментів допоміжних передач та ходової передачі ще однієї обмежуючої величини, щонайменше одного обмежуючого будь-яку допоміжну передачу і/або ходову передачу параметра. Завдяки цьому підвищується експлуатаційна надійність, а двигун привода включається в систему регулювання потужності. Так, наприклад, в пристрої оцінки та управління для регулювання потужності двигуна можуть бути використані такі обмежуючі потужність двигуна параметри, як температура охолоджувальної води або масла в двигуні. Якщо пристрій оцінки та управління встановлює за допомогою відповідних датчиків, що значення обмежуючого параметра наближаються до ще допустимої граничної зони, то пристрій оцінки та управління може, використовуючи відповідний алгоритм, таким чином відрегулювати потужність двигуна, щоб апроксимуюча крива все більшою мірою вирівнювала наближення до граничного значення обмежуючого потужність параметра так, щоб граничне значення досягалося б тільки методом апроксимації і повільно, що забезпечує не різке, але плавне зменшення потужності двигуна. Такий пристрій підвищує експлуатаційну надійність робочої машини і лише незначно погіршує її функціонування. Подальший варіант здійснення винаходу передбачає при збільшенні обертаючого моменту на одному або більше допоміжних передачах генерування пристроєм оцінки та управління такого управляючого сигналу для інжекторного насоса, який викликав би короткотермінове збільшення кількості палива, що уприскується, на одиницю вихідної потужності, а потім його швидке зниження. В збиральних машинах особливо прийнятно встановлювати датчики кількості зібраної маси, що проходить потоком через машину, які задають зміну необхідної потужності певних допоміжних передач. Наприклад, за допомогою датчика в приймальному каналі комбайна можна було б виявляти збільшення маси, що надходить на молотильний орган, із-за чого автоматично відбувається короткотермінове збільшення потужності двигуна привода, завдяки чому в молотильному барабані, що обертається, з його моментом інерції своєчасно накопичується енергія для її використання у випадку необхідності переробки більшої кількості зібраної маси. Все це відбувається під контролем пристрою оцінки та управління. В подальшому варіанті виконання винаходу передбачено управління потужністю, яке при нерівномірному завантаженні робочої машини забезпечує її рівномірну роботу. Для цього при короткотерміновому збільшенні потужності або раптовому зменшенні числа обертів пристрій оцінки та управління без перестановки педалі газу короткотерміново збільшує за допомогою відповідного регулюючого алгоритму подачу палива в двигун привода, а після цього повертає подачу з більшою постійною часу до початкового значення. Подальше поліпшення роботи пристрою досягається тоді, коли відповідні датчики, встановлені перед робочим агрегатом, споживаючим більшу частину наявної потужності, виявляють зміни в потоці зібраної маси і передають дані про це пристрою оцінки та управління. Пристрій оцінки та управління може після цього заздалегідь визначити необхідну потужність і виробити регулюючий сигнал на збільшення потужності двигуна і/або передачі і передати їм. Наступний пік навантаження компенсується після цього додатковим маховим моментом і/або управляючим моментом. Точно так само можливим є для економії палива зменшити потужність двигуна при зменшенні потреби в потужності. Такий пристрій, наприклад, в польовому подрібнювачі з великою необхідною потужністю подрібнювального барабана може відвернути різке падіння числа обертів всіх елементів і, крім того, вирівняти робочу швидкість, щоб виключити перешкоди у вивантаженні зібраної маси на перевантажувальний транспортний засіб, що рухається поряд з робочою машиною. Винахід, що пропонується, може бути використаний не тільки в самохідних робочих машинах, але і в комбінації тягового транспортного засобу з причепним або навісним робочим агрегатом, який приводиться від тягового засобу щонайменше через одну допоміжну передачу. Для цього між навісним агрегатом і робочою машиною може бути передбачено рознімання, через яке обмежуючі потужність величини, наприклад, обертаючий момент на допоміжній передачі або на відгалуженій від неї передачі відомим способом, наприклад, з використанням шинної системи CAN, передається на пристрій оцінки та управління. Винахід пояснюється нижче наведеними прикладами здійснення та кресленнями, що додаються, на яких зображені: на фіг.1 - схема зернозбирального комбайна з допоміжними передачами (робочими агрегатами), що приводяться від двигуна, в розрізі; на фіг.2 - блочна схема привода; на фіг.3 - схема привода самохідного польового подрібнювана; на фіг.4 - трактор як тягова машина з навісним пресом для формування кіп. На фіг.1 показана схема зернозбирального комбайна в розрізі. Від докладніше не позначеного двигуна привода через допоміжні передачі приводяться докладніше не показані робочі агрегати. При цьому цифрою (3) позначена, наприклад, допоміжна передача на жатці, цифрою (4) - допоміжна передача на молотильні органи і цифрою (5) - допоміжна передача на соломорізку. Інші допоміжні передачі (робочі агрегати) з міркувань наочності не наведені. Цифрою (7) позначений привод допоміжних передач. На фіг.2 також схематично показана блочна схема з приводним двигуном (1), регулятором його потужності (1А), редуктором для ходової передачі (2) і трьома допоміжними передачами (3, 4, 5). Вихідна потужність двигуна (РА) розподіляється між редуктором (PG) та допоміжними передачами (PN, PN1, PN2, PN3). Вимірювальні пристрої (2А, 3 А, 4А, 5 А) для розпізнання обмежуючих потужність величин, в основному обертаючих моментів, подають вхідні сигнали (MG, MN1, МN2 , МN 3) на пристрої оцінки та управління (6). Пристрій оцінки та управління (6) приймає зміряні величини від вимірювальних приладів (2А, 3А, 4 А, 5 А) і перетворює їх в управляючий сигнал (S). Програми оцінки та граничні величини для окремих передач зберігаються в блоку пам'яті (6А). Перетворення їх в управляючий сигнал (S) здійснюється з використанням відповідного програмного забезпечення як програми оцінки шляхом порівняння зміряних величин з тими граничними величинами, що зберігаються в блоку пам'яті. Якщо при порівнянні виявляється, що зміряні величини перевищують граничні в одному або більше робочих агрегатах і/або в ходовій передачі чи якщо зміряні величини значно менше гранично допустимих, то на регулятор потужності (1А) передається поправочний управляючий сигнал (S), що формується з різниці між зміряними та заданими граничними величинами. Поправка може вироблятися, наприклад, з використанням поля характеристик або відповідного регулюючого алгоритму. Якщо наступне порівняння пристроєм оцінки та управління (6) зміряних та граничних величин дасть зміну в різниці цих величин, то пристрій оцінки та управління (6) видасть новий управляючий сигнал (S), який знов передається на регулятор потужності (1А). Якщо порівняння зміряних і граничних величин відбувається в короткій часовій послідовності, то досягається вузькоступінчасте регулювання, яке забезпечується водієм самохідної робочої машини як поточне і без великих стрибків в регулюванні. Завдяки цьому регулюванню можна уникнути перевантажень одного або більше робочих агрегатів шля хом зменшення потужності двигуна привода (1). Можливо також мобілізувати резерви потужності двигуна привода (1), якщо визначати за допомогою датчиків неповне розвантаження ходової передачі (2) або однієї з допоміжних передач (3, 4, 5). В обох напрямках регулювання більш прийнятно співставляти в процесі регулювання експлуатаційні параметри двигуна привода. Тому пристрій оцінки та управління (6) може запитувати як параметри (Z), наприклад, значення температур охолоджувального засобу і/або масла в двигуні (1), тиску завантаження турбозавантажувача, температури займання палива в двигуні привода (1) або часу регулювання клапана і включати їх у процес визначення управляючого сигналу (S). При такій формі виконання винаходу не тільки розташовані за двигуном (1) елементи передач, але і самий двигун (1) включається в систему регулювання привода і захищається від перевантаження та зайвого зносу. Крім того, як параметр (Z) можуть розглядатися також експлуатаційні показники, наприклад, температури охолоджувального засобу і/або масла в ходовій передачі, а також параметри однієї або декількох допоміжних чи інши х передач. Однак пристрій оцінки та управління (6) може переробляти як параметр (Z) також уведені вручн у або задані автоматично відхилення граничних значень, що зберігаються у блоку пам'яті, або регулюючі алгоритми. Так, граничні значення можуть змінюватися при заміні пристроїв на вході, наприклад, жатки, або при підключенні додаткових агрегатів самохідної робочої машини, наприклад, підготовчих, подрібнювальних або різальних пристроїв. Автоматизована зміна граничних величин, що зберігаються в блоку пам'яті, може здійснюватися, наприклад, з використанням відшукувача, який розпізнає підключені на вхід робочої машини пристрої, причому при підключенні цих пристроїв сигнали їхнього впізнання передаються на пристрої оцінки та управління або, що більш прийнятно, підключення або відключення цих пристроїв здійснюється, наприклад, шляхом опитування місць експлуатаційного підключення. На фіг.3 показана схема привода польового подрібнювача. Двигун привода (1) передає свою потужність через привод (7) допоміжним передачам. Для регулювання ходової передачі (2) і окремих передач до привода (7) підключені гідронасоси (10), продуктивність яких контролюється датчиком (20А). Потужність привода передається через допоміжні передачі (3, 4, 5) на робочі агрегати: кидалку (11), зернодробильні валки (12), барабан подрібнювача (13) та підпресовуючі валки (14). Потужність, що передається допоміжною передачею (3), контролюють розміщені на приводних валах датчики (20А, 12А, 3 А, 4 А), які передають свої дані пристрою оцінки та управління (6). Пристрій оцінки та управління (6) передає управляючий сигнал (S) на регулятор потужності (1А) двигуна привода (1). Для винаходу незалежно від показаного на фіг.3 прикладу виконання не має значення, відбувається порівняння граничних величин в пристрої оцінки та управління (6) чи вже в датчиках (2А, 3А, 4 А, 5 А, 12 А, 20 А), які до того ж оснащені відповідними комп'ютерними елементами оцінки і пам'яті для порівняння і видачі визначених ними величин, причому датчики ((2А, 3А, 4А, 5А, 12А, 20А) передають генерований сигнал на пристрій оцінки та управління (6). Для забезпечення пристроєм оцінки та управління високої швидкості регулювання більш прийнятно, щоб він не виробляв всі оцінки, а лише оцінював передані від датчиків (2А, 3А, 4 А, 5А, 12А, 20А) відносні величини. При цьому мережа комунікацій CAN, до якої можуть бути підключені всі елементи системи та датчики (2А, 3А, 4 А, 5 А, 12А, 20 А), завантажується незначною кількістю даних. Якщо від одного з датчиків (2А, ЗА, 4 А, 5А, 12А, 20А) надходить сигнал про перевантаження, то пристрій оцінки та управління (6) передає управляючий сигнал (S), за яким знижується потужність двигуна привода. Якщо датчики (2А, 3А, 4 А, 5 А, 12А, 20А) сигналізують, що граничні значення не досягнуті, то пристрій оцінки та управління (6) може передати управляючий сигнал (S), який для забезпечення оптимальної робочої потужності самохідної машини збільшує або зменшує потужність двигуна. Регулювання залежить тільки від заданих величин, які уведені водієм або можуть бути викликані із запам'ятовуючого пристрою. До підпресовуючого валка (14) підключений датчик (14А), який визначає зумовлене кількістю зібраної маси відхилення валка (14), щоб по відхиленню валка, приблизно пропорційному кількості завантаженої маси, визначити наступні навантаження робочих агрегатів. Зміряне значення передається на пристрої оцінки та управління (6). Якщо порівняння зміряних датчиками (4А) та (14А) величин покаже, що обертаючий момент, який передається, недостатній для переробки маси, що надійшла від барабана подрібнювача (13), без значного зниження продуктивності, то пристрій оцінки та управління (6) передає на регулятор потужності (1А) управляючий сигнал (S), за яким для забезпечення безперешкодної переробки маси, що надійшла, короткотерміново підвищуються потужність або число обертів двигуна привода (1). Сенсорика датчика (14А) могла б також вимірювати відхилення притиску, обертаючий момент завантажувального шнека або захватного пристосування, а лазерний сканер - сканувати висоту валка пшениці перед самохідним польовим подрібнювачем. Функціонально подібна сенсорика може бути використана відповідним чином в будь-яких інших самохідних робочих машинах, наприклад, в жатці або скісному транспортері комбайна, а також в причіпних або самохідних пресах для формування кіп. На фіг.4 схематично показаний трактор (20) з причіпним пресом (22) для формування великих кіп. Трактор (20) має двигун привода (1), який віддає свою потужність редуктору (24), від якого потужність передається ходовій передачі (2), показаній тут як привод на усі колеса, і на вал відбору потужності (26). Через муфту зчеплення (28) потужність з вала відбору потужності (26) передається на карданний вал (30) причепленого до трактора (20) преса (22) для формування великих кіп. Карданний вал (30) передає потужність головному редуктору (32) причіпного преса (22) для формування великих кіп. Головний редуктор (32) приводить різноманітні робочі агрегати преса (22), а саме, захватне пристосування від допоміжної передачі (3), пристрої, транспортувальний пристрій від допоміжної передачі (4) та пристрій для в'язки від подавального вала (5). Розміщені на ходовій передачі, а також на допоміжних передачах причепного преса (22) датчики (2А, 3 А, 4 А, 5А, 30А) безпосередньо або через рознімання зв'язані з пристроєм оцінки та управління (6), який після оцінки зміряних величин передає похідний від них управляючий сигнал (S) на регулятор потужності (1А) двигуна (1). Таким чином може бути здійснене запропоноване регулювання привода також і в комбінації тягового транспортного пристрою з навісним або причіпним робочим агрегатом, що приводиться від тягового транспортного засобу. Даний опис слід розуміти тільки як приклад. Фахівець спроможний легко знайти варіанти запропонованого рішення, які відповідали б його технічним потребам або конкретним машинам, в яких він хотів би використати запропоноване рішення.
ДивитисяДодаткова інформація
Назва патенту англійськоюSelf-propelled working machine
Автори англійськоюDiekhans Norbert
Назва патенту російськоюСамоходная рабочая машина
Автори російськоюДикханс Норберт
МПК / Мітки
МПК: F02D 31/00, A01D 43/00
Мітки: робоча, самохідна, машина
Код посилання
<a href="https://ua.patents.su/8-69373-samokhidna-robocha-mashina.html" target="_blank" rel="follow" title="База патентів України">Самохідна робоча машина</a>
Самохідна бурякозбиральна машина

Номер патенту: 1678
Опубліковано: 25.10.1994
Автори: Данильченко Михайло Григорович, Кашурко Олександр Савелович, Черняков Фелікс Аронович, Смакоуз Георгій Микитович, Козіброда Ярослав Іванович
МПК: A01D 27/00
Мітки: бурякозбиральна, машина, самохідна
Формула / Реферат:
Самоходная свеклоуборочная машина, содержащая установленные на раме рабочие органы, механический копирводитель автомата управления передними колесами с цилиндром, гидростатический привод задних колес с напорным и возвратным маслопроводами, сообщающимися между собой через регулируемый реверсивный насос, мотор и линию подпитки с обратным клапаном, отличающаяся тем, что, с целью повышения надежности работы, напорный и возвратный маслопроводы...
Самохідна коренезбиральна машина

Номер патенту: 69202
Опубліковано: 16.08.2004
Автори: Кондрачук Петро Іванович, Кичма Ігор Данилович, Маланчин Анатолій Миколайович, Вовк Ярослав Юрійович, Безпальок Андрій Петрович, Кривицька Ірина Владиславівна, Павлов Ярослав Антонович
МПК: A01D 27/00
Мітки: машина, коренезбиральна, самохідна
Формула / Реферат:
Самохідна коренезбиральна машина, що містить основну раму і раму з викопуючими органами, що з’єднана задньою частиною з основною рамою за допомогою сферичного шарніра, а від поперечного відхилення відносно шарового шарніра утримана роликами, що вільно оперті на поверхні клинових опорних поверхонь пристрою, встановленого на основній рамі і яким регулюють поперечне її відхилення відносно шарового шарніра, і оперта передньою своєю частиною на...
Самохідна збиральна машина

Номер патенту: 26142
Опубліковано: 07.06.1999
Автор: ЛАНДВЕР Карл-Хайнц
МПК: A01D 41/02
Мітки: збиральна, самохідна, машина
Формула / Реферат:
1. Самоходная уборочная машина с двигателем, радиатором с вентилятором и расположенным перед последним ротационным сетчатым устройством для отделения частиц грязи, содержащихся в засасываемом для охлаждения воздухе, причем ротационное сетчатое устройство в зоне со стороны всасывания воздуха снабжено, по крайней мере, частично открытым к сетчатому устройству всасывающим кожухом, активная площадь разрежения которого меньше воздухозаборной...
Самохідна зернозбиральна машина

Номер патенту: 42702
Опубліковано: 15.11.2001
Автор: Дамманн Йоганнес
МПК: A01D 41/02, B62D 55/00
Мітки: машина, зернозбиральна, самохідна
Формула / Реферат:
1. Самоходная зерноуборочная машина, имеющая шасси, отличающаяся тем, что шасси состоит из двух соединенных полугусениц спереди и одной управляемой полугусеницы сзади.2. Самоходная зерноуборочная машина по п. 1, отличающаяся тем, что задний конец управляемой полугусеницы в направлении движения находится перед концом отдачи разделяющего направления.3. Самоходная зерноуборочная машина по п. 1, отличающаяся тем, что задний конец...
Самохідна збиральна машина

Номер патенту: 25938
Опубліковано: 26.02.1999
Автори: Гюнтер Айс, Хайнріх Оструп
МПК: A01D 75/00, A01D 41/14
Мітки: машина, самохідна, збиральна
Формула / Реферат:
1. Самоходная уборочная машина, содержащая смонтированный на фронтальной стороне самоходного шасси рабочий орган, установленный с возможностью поворота поперечно к направлению движения машины и имеющий средства для указанного поворота рабочего органа, которые выполнены в виде двух расположенных на расстоянии друг от друга в поперечной плоскости гидроцилиндров, концы штоков которых посредством несущих элементов закреплены в имеющихся на...
Попередній патент: Фармацевтична композиція для лікування зниженої кісткової маси (варіанти) та набір (варіанти)
Наступний патент: Спосіб вилучення бурштину з родовища
Випадковий патент: Спосіб виготовлення спіральних пружних профілів зі стрічок сплавів, що дисперсійно твердіють