Самохідна сільськогосподарська збиральна машина з керованим перенавантажувальним пристроєм
Номер патенту: 95459
Опубліковано: 10.08.2011
Автори: Дікханс Норберт, Нінабер Герхард, Бруннерт Андреас, Меєр цу Хелліген Ларс
Формула / Реферат
1. Самохідна сільськогосподарська збиральна машина (2), оснащена навігаційною системою (6) для збору даних про відносні місцеположення транспортних засобів-учасників (2, 3), системою передачі даних (8) для обміну даними між транспортними засобами (2, 3), перевантажувальним пристроєм (9) для передачі зібраного врожаю на вантажний транспортний засіб (3), причому перевантажувальний пристрій (9) має пересипне пристосування (10), керуючу систему (12) для позиціонування пересипного пристрою (10) і відкидний щиток (11) пересипного пристосування, яка відрізняється тим, що точка падіння (13) струменя перевантажуваної продукції (14) знаходиться в області дозволеності (15), яка обмежується зоною із замкненим контуром (16), при цьому область дозволеності (15) і зона із замкненим контуром (16) відтворюють вантажну площу (17) транспортного контейнера (5).
2. Самохідна сільськогосподарська збиральна машина за п. 1, яка відрізняється тим, що вантажна площа (17) транспортного контейнера (5) утворюється контуром (18) транспортного контейнера.
3. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що контур (18) транспортного контейнера утворює зовнішнє обмеження (19) зони із замкненим контуром (16).
4. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що зовнішнє обмеження (19) є змінне регульованим.
5. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що внутрішнє обмеження (20) зони із замкненим контуром (16) знаходиться всередині контурного обмеження (18) вантажної площі (17).
6. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що внутрішнє обмеження (20) частково або повністю збігається із зовнішнім обмеженням (19) зони із замкненим контуром (16).
7. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що через змінне регульоване внутрішнє обмеження (20) зони із замкненим контуром (16) також регулюється і розмір області дозволеності (15) для точки падіння (13) струменя перевантажуваної продукції (14).
8. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що із зміною залежних від машини та умов збирання врожаю параметрів здійснюється зміна встановлення зони із замкненим контуром (16).
9. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що із зміною залежних від умов збирання врожаю параметрів здійснюється встановлення внутрішнього обмеження (20) зони із замкненим контуром (16).
10. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що із зміною насипного конуса здійснюється зміна внутрішнього обмеження (20) зони із замкненим контуром (16).
11. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що із зміною залежних від машини параметрів здійснюється зміна внутрішнього обмеження (20) зони із замкненим контуром (16).
12. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що із зміною відносної швидкості машини здійснюється зміна внутрішнього обмеження (20) зони із замкненим контуром (16).
13. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що утворене між внутрішнім та зовнішнім обмеженнями (19, 20) зони із замкненим контуром (16) поле являє собою заборонену зону (23) для точки падіння (13) струменя перевантажуваної продукції (14).
14. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що теоретично визначене місцеположення точки падіння (13) вирішальним чином впливає на запуск процесу перевантаження.
15. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що процес перевантаження не розпочинається, якщо точка падіння (13) струменя перевантажуваної продукції (14) знаходиться у забороненій зоні (23).
16. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що процес перевантаження розпочинається, якщо точка падіння (13) струменя перевантажуваної продукції (14) знаходиться в області дозволеності (15).
17. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що процес перевантаження припиняється, якщо точка падіння (13) струменя перевантажуваної продукції (14) виходить за межі області дозволеності (15).
18. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що внутрішнє обмеження (20) зони із замкненим контуром (16) утворюється із чотирьох обмежувальних ліній (24, 25, 26, 27).
19. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що пересипне пристосування (10) у зернозбиральному комбайні, як одного з засобів-учасників, утворюється із вивантажувальної труби зернового бункера.
20. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що пересипне пристосування (10) у косарці-подрібнювача, як одного з засобів-учасників, утворюється із викидного коліна.
21. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що перевантаження зібраного врожаю із збиральної машини (2) на вантажний транспортний засіб (3) здійснюється безперервно або з зупинками.
Текст
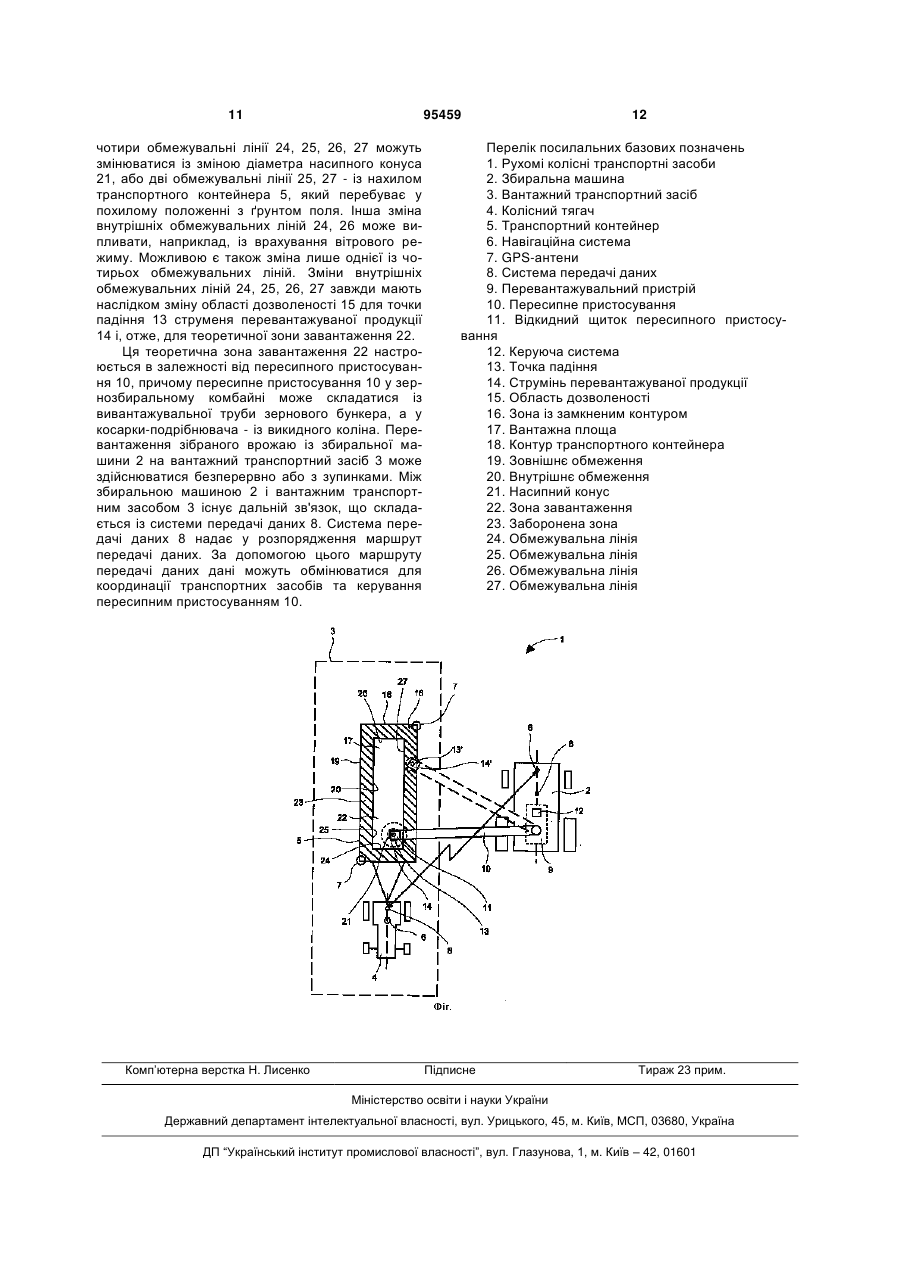
1. Самохідна сільськогосподарська збиральна машина (2), оснащена навігаційною системою (6) для збору даних про відносні місцеположення транспортних засобів-учасників (2, 3), системою передачі даних (8) для обміну даними між транспортними засобами (2, 3), перевантажувальним пристроєм (9) для передачі зібраного врожаю на вантажний транспортний засіб (3), причому перевантажувальний пристрій (9) має пересипне пристосування (10), керуючу систему (12) для позиціонування пересипного пристрою (10) і відкидний щиток (11) пересипного пристосування, яка відрізняється тим, що точка падіння (13) струменя перевантажуваної продукції (14) знаходиться в області дозволеності (15), яка обмежується зоною із замкненим контуром (16), при цьому область дозволеності (15) і зона із замкненим контуром (16) відтворюють вантажну площу (17) транспортного контейнера (5). 2. Самохідна сільськогосподарська збиральна машина за п.1, яка відрізняється тим, що вантажна 2 (19) 1 3 95459 4 10. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що із зміною насипного конуса здійснюється зміна внутрішнього обмеження (20) зони із замкненим контуром (16). 11. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що із зміною залежних від машини параметрів здійснюється зміна внутрішнього обмеження (20) зони із замкненим контуром (16). 12. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що із зміною відносної швидкості машини здійснюється зміна внутрішнього обмеження (20) зони із замкненим контуром (16). 13. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що утворене між внутрішнім та зовнішнім обмеженнями (19, 20) зони із замкненим контуром (16) поле являє собою заборонену зону (23) для точки падіння (13) струменя перевантажуваної продукції (14). 14. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що теоретично визначене місцеположення точки падіння (13) вирішальним чином впливає на запуск процесу перевантаження. 15. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що процес перевантаження не розпочинається, якщо точка падіння (13) струменя перевантажуваної продукції (14) знаходиться у забороненій зоні (23). 16. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що процес перевантаження розпочинається, якщо точка падіння (13) струменя перевантажуваної продукції (14) знаходиться в області дозволеності (15). 17. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що процес перевантаження припиняється, якщо точка падіння (13) струменя перевантажуваної продукції (14) виходить за межі області дозволеності (15). 18. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що внутрішнє обмеження (20) зони із замкненим контуром (16) утворюється із чотирьох обмежувальних ліній (24, 25, 26, 27). 19. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що пересипне пристосування (10) у зернозбиральному комбайні, як одного з засобівучасників, утворюється із вивантажувальної труби зернового бункера. 20. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що пересипне пристосування (10) у косарці-подрібнювача, як одного з засобівучасників, утворюється із викидного коліна. 21. Самохідна сільськогосподарська збиральна машина за одним з попередніх пунктів, яка відрізняється тим, що перевантаження зібраного врожаю із збиральної машини (2) на вантажний транспортний засіб (3) здійснюється безперервно або з зупинками. Даний винахід стосується загалом галузі сільського господарства та переробки збираної рослинної продукції. Для цього використовуються рухомі колісні транспортні засоби, зокрема самохідні сільськогосподарські збиральні машини, які призначені для підбирання врожаю та для переробки продукції. Під самохідними сільськогосподарськими машинами мова, як правило, йде про зернозбиральні комбайни, косарки-подрібнювачі та всі види копальних машин, які оснащені механізмами для переробки та пристроями для транспортування збираного врожаю. Одним з таких транспортувальних пристроїв є, наприклад, перевантажувальне пристосування, яким увесь збираний врожай переправляється на вантажний транспортний засіб або причіпний транспортний контейнер. Збиральні машини під час процесу збирання врожаю безперервно підбирають продукцію, переробляють її відомими способом та засобами і передають урожай або потокове, наприклад, у випадку самохідної косарки-подрібнювача, або після проміжного накопичування, наприклад, у випадку зернозбирального комбайна, на вантажний транспортний засіб, що рухається паралельно поруч або ззаду збиральної машини. Передача зібраного врожаю здійснюється через перевантажувальний пристрій, який у зернозбиральному комбайні та інших збиральних машинах складається із пересипного пристосування. Пересипне пристосування у зернозбиральному комбайні може бути виконане у вигляді випускної труби зернового бункера, а у косарки-подрібнювача - у вигляді викидного коліна, на кінці яких знаходиться відкидний щиток. За допомогою пересипного пристосування передача зібраного врожаю між самохідною збиральною машиною та вантажним транспортним засобом здійснюється з якомога меншими втратами. З цією метою пересипне пристосування обладнане керуючим пристроєм для автоматичного або ручного регулювання, а самохідна сільськогосподарська збиральна машина - навігаційною системою для збору даних про місцеположення транспортних засобів-учасників. Такі транспортні засоби, - зокрема самохідні сільськогосподарські збиральні машини з перевантажувальним пристроєм для передачі зібраного врожаю на вантажний транспортний засіб або причіпний транспортний контейнер, причому перевантажувальний пристрій має пересипне пристосування, керуючий пристрій для встановлення робочого положення пересипного пристосування, відкидного щитка пересипного пристосування та 5 вихідного струменя зібраного врожаю, а також навігаційну систему для визначення відносних позицій транспортних засобів-учасників та передачі даних між транспортними засобами, - досить відомі з рівня техніки. При цьому відомі різні способи автоматичного завантаження вантажного транспортного засобу з косарки-подрібнювача за допомогою автоматичного пересування викидного коліна. Наочним є приклад із патентної заявки ЕР 1 454 520 А1. У цьому документі описаний керуючий пристрій для позиціонування пересипного пристосування відповідно до його степеня вільності, у якому висота викиду, тобто висота вихідного отвору розвантажувального пристрою може утримуватися незалежно від лінії поверхні ґрунту та обертання навколо вертикальної осі. Недолік цього керуючого пристрою полягає у тому, що не проводиться облік, наприклад, відносної швидкості та позиції вантажного транспортного засобу і, отже, не може визначатися точка падіння перевантажувальної продукції на транспортному засобі, який цю продукцію приймає. Щоб усунути вищезазначений недолік, в зв'язку з цим у рівні техніки описуються різні способи збору даних про позиції транспортних засобівучасників та їхні габарити. Такий пристрій для збору даних про позицію та визначення габаритів самохідних сільськогосподарських транспортних засобів розкриті у патентній заявці DE 100 64 862 А1, яка стосується встановленої на транспортних засобах навігаційної системи, яка визначає відносну позицію транспортних засобів-учасників, між якими має перевантажуватися зібраний врожай, що складаються, наприклад, із збиральної та вантажної транспортної машин. Визначені числові дані використовуються для поліпшення координації транспортних засобів один до одного. Числові дані застосовуються також для керування пересипним пристосуванням, тобто за даними про фактичне положення збиральної машини та вантажного транспортного засобу обчислюється робоче положення пересипного пристрою. Потім за зібраними даними обчислюється теоретична точка падіння перевантажуваної продукції на вантажному транспортному засобі, виходячи із габаритів транспортного контейнера і/або вантажного транспортного засобу та фактичного робочого положення пересипного пристосування. Якщо точка падіння перевантажуваної продукції знаходиться поза контуром транспортувального контейнера чи відповідного іншого транспортного засобу, тоді генерується попереджувальне повідомлення. Щоб у подальшому скоротити втрати врожаю при перевантаженні або принаймні звести їх до мінімуму, необхідно, аби точка падіння перевантажуваної продукції на вантажному транспортному засобі визначалася ще точніше та була керованою. І тому у пріоритетному описі винаходу DE 10 2004 052 298 А1 була запропонована керуюча система для пересипного пристосування, яка скорочує безперервний контроль водієм процесу перевантаження та забезпечує передачу зібраного врожаю на вантажний транспортний засіб з неве 95459 6 личкими втратами. Метою цієї автоматизованої системи керування є позиціонування безперервного потоку перевантажуваної продукції в межах заданої геометричної схеми. Визначувана геометрична схема складається із віртуальної координатної сітки, яка обводить часткову зону або всю зону збиральної машини і таким чином перекриває також вантажний транспортний засіб. Сітка складається із множини полів. За допомогою керування вихідним струменем перевантажуваної продукції водій може спрямовувати цей струмінь при вивантаженні із пересипного пристосування на націлене поле віртуальної сітки. Загалом передача зібраного врожаю орієнтується на положення та розмір віртуальної сітки, а також на розмір та положення полів, так що зона повертання пересипного пристосування визначається віртуальною сіткою та віртуальними полями. Недостатнім у цій формі виконання керуючої системи для пересипного пристрою є те, що водій самохідної сільськогосподарської збиральної машини, окрім того, повинен займатися наведенням пересипного пристосування і, відповідно, вихідного струменя перевантажуваної продукції, щоб змінювати точку падіння цієї продукції на вантажній площі транспортного засобу таким чином, аби перевантаження зібраного врожаю у цілому відбувалося без втрат і не здійснювалося мимо вантажного транспортного засобу, залишаючись лежати на полі як невиправдані втрати. Тому в основу винаходу поставлено задачу створити пристрій керування або, відповідно, керуючу систему зазначеного на початку типу, які б були позбавлені вказаних недоліків, відомих з рівня техніки систем і надавали технічне рішення, що забезпечувало б можливість при виконанні процесу перевантаження допомагати водієві або звільняти його від зайвих обов'язків таким чином, щоб виключалися втрати зібраного врожаю через недостатньо скоординоване перевантаження, ускладнений візуальний зв'язок з транспортними засобами або перевантажувальні роботи у нічний час. Згідно з винаходом, ця проблема вирішується за допомогою характеризуючих ознак пункту 1 патентної формули. Переважні розробки та удосконалення винаходу випливають із нижченаведених залежних пунктів формули та наступних описів. Для того, щоб виготовляти транспортні засоби з такими ознаками даного винаходу, зокрема самохідні сільськогосподарські збиральні машини, оснащені навігаційною системою для визначення відносних місцеположень транспортних засобівучасників, системою передачі даних для обміну даними між транспортними засобами, перевантажувальним пристроєм для передачі зібраного врожаю на вантажний транспортний засіб, причому перевантажувальний пристрій має пересипне пристосування, керуючий пристрій для позиціонування пересипного пристосування та відкидний щиток перевантажувального механізму, згідно з винаходом, пропонується виконати відомі з рівня техніки засоби керування такими, щоб перевантаження зібраного врожаю на вантажний транспортний засіб або його причіпний контейнер здійснювалося тільки у межах дозволеної зони, тобто 7 бажана точка падіння струменя перевантажуваного врожаю повинна знаходитися у заданій дозволеній області. Область дозволеності обмежується зоною із замкненим контуром, при цьому область дозволеності і зона із замкненим контуром відтворюють поле транспортного контейнера. Поле транспортного контейнера утворюється контуром цього контейнера і, відповідно, габаритами вантажної транспортної машини і/або транспортного контейнера. Контур транспортного контейнера утворює при цьому зовнішнє обмеження зони із замкненим контуром. Зовнішнє обмеження зони із замкненим контуром залежне від геометричних параметрів вантажної транспортної машини і/або транспортного контейнера і тому може змінно регулюватися. Збір даних про габарити та визначення місцеположення вантажної транспортної машини/транспортного контейнера можуть здійснюватися сенсорним шляхом, наприклад через навігаційну систему з GPS-антенами на транспортному контейнері і/або комбінацією із датчиків та математичної моделі. Внутрішнє обмеження зони із замкненим контуром, навпаки, знаходиться всередині обмеження поля транспортного контейнера і є частиною вантажної площі, при цьому внутрішнє обмеження зони із замкненим контуром в окремому випадку може збігатися, частково або повністю, із зовнішнім обмеженням зони із замкненим контуром. Тобто завдяки змінно встановлюваному внутрішньому обмеженню зони із замкненим контуром під час процесу перевантаження може бути регульований також розмір області дозволеності для точки падіння струменя перевантажуваної продукції. Регулювання розміру області дозволеності обумовлюється необхідністю і/або умовами збирання врожаю. Необхідність регулювання є, отже, залежною від різноманітних параметрів, як, наприклад, залежні від машини та умов збирання врожаю параметри, внаслідок чого може здійснюватися зміна встановлення зони із замкненим контуром, а саме внутрішнього і/або зовнішнього обмеження зони із замкненим контуром. Із зміною залежних від умов збирання врожаю параметрів, таким чином, може здійснюватися зміна встановлення внутрішнього обмеження зони із замкненим контуром. Залежними від умов збирання врожаю параметрами є, наприклад, насипний конус транспортованого зібраного врожаю, який внаслідок різної вологості продукції може змінюватися за величиною. Суха перевантажувана продукція утворює малий насипний конус, а волога продукція, навпаки, - великий насипний конус. Із зміною величини насипного конуса повинно також варіюватися встановлення внутрішнього обмеження зони із замкненим контуром, а отже, і розмір області дозволеності для точки падіння струменя перевантажуваної продукції. Вплив на форму насипного конуса мають також сорт і/або довжина подрібнення збираної злакової культури. Зміни залежних від машини параметрів можуть також спричинити собою зміну внутрішнього обмеження зони із замкненим контуром. Залежними від машини параметрами є, наприклад, швид 95459 8 кість руху збиральної машини і/або вантажного транспортного засобу, а також відносна швидкість машин стосовно одна одної, внаслідок чого внутрішнє обмеження зони із замкненим контуром під час процесу перевантаження може змінюватися та встановлюватися відповідно до нових обставин. Наступний залежний від машини параметр враховує похиле положення збиральної машини та вантажного транспортного засобу, тобто кут кривизни поверхні поля або нахил вантажного транспортного засобу і/або збиральної машини до ґрунту. Ці параметри при встановленні внутрішнього обмеження зони із замкненим контуром надходять також до пристрою обчислювальної обробки даних для керуючої системи. До пристрою обробки даних для керуючої системи пересипного пристосування можуть надходити також параметри від датчиків, які реєструють умови навколишнього середовища. Параметрами умов навколишнього середовища є, наприклад, напрямок та швидкість вітру. Утворене між внутрішньою та зовнішньою обмежувальними лініями зони із замкненим контуром поле являє собою заборонену зону для точки падіння струменя перевантажуваної продукції. У цю заборонену зону продукція не повинна потрапляти. Заборонена зона утворює для перевантаження зібраного врожаю запобіжну зону по контуру транспортного контейнера, яка, за необхідності, може збільшуватися або зменшуватися. Теоретична точка падіння струменя перевантажуваної продукції на вантажному транспортному засобі і, відповідно, транспортному контейнері визначається згідно з описаними способами із рівня техніки патентних заявок DE 100 64 862 А1 та DE 10 2004 052 298 A1. Визначене положення точки падіння вирішує, може розпочинатися процес перевантаження чи ні. Якщо теоретично визначена точка падіння струменя продукції знаходиться в межах забороненої зони, процес перевантаження не запускається. Транспортування продукції при вже запущеному процесі перевантаження припиняється до тих пір, поки теоретична точка падіння зібраного врожаю знов не опиниться в області дозволеності вантажної зони. Якщо теоретична точка падіння струменя врожаю знаходиться в області дозволеності вантажної зони, пересипне пристосування вмикається і процес перевантаження запускається. Тобто процес перевантаження автоматично запускається і/або здійснюється лише за умови перебування точки падіння перевантажуваної продукції в межах дозволеної зони. У випадку виходу точки падіння продукції за межі дозволеної зони процес перевантаження автоматично вимикається і водій збиральної машини та вантажного транспортувального засобу інформуються за допомогою попереджувального сигналу. Водій збиральної машини має тепер можливість продовжувати процес перевантаження шляхом ручного керування пересипним пристосуванням. Конкретний приклад виконання винаходу чисто схематично показаний на кресленні на основі процесу перевантаження і в подальшому описується більш детально. На ньому показано: - схематичне зображення транспортних засобів-учасників під час процесу збирання та перева 9 нтаження врожаю, причому один транспортний засіб є збиральною машиною, а другий - вантажним транспортним засобом з зоною перевантаження згідно з винаходом. - у схематичному зображенні два транспортних засоби 1, що рухаються паралельно поруч один з одним, у горизонтальній проекції. Один транспортний засіб складається із самохідної збиральної машини 2 у вигляді зернозбирального комбайна з відомими елементами, наприклад механізмом підбирання врожаю, кабіною водія, зерновим бункером, приводом ходової частини, шасі і т.д., на яких тут не слід детально зупинятися, а другий вантажний транспортний засіб 3 складається із колісного тягача 4 з причіпним транспортним контейнером 5. Вантажний транспортний засіб 3 може також складатися із колісного тягача 4 з інтегрованим транспортним контейнером 5, так званим напівпричепом, наприклад вантажним автомобілем. Але під самохідною збиральною машиною 2 мова може йти також, наприклад, про косаркуподрібнювач. Косарка-подрібнювач підбирає врожай приймальним механізмом з оброблюваного поля, подрібнює його і передає за допомогою перевантажувального пристрою 9 на вантажний транспортний засіб 3 або транспортний контейнер 5, при цьому перевантажувальний пристрій 9 складається із керуючої системи 12, пересипного пристосування 10 і відкидного щитка 11 пересипного пристосування для безперервного перевантаження збираної продукції. Зернозбиральний комбайн 2 теж підбирає врожай приймальним механізмом з оброблюваного поля, подрібнює і сепарує його, причому солом'яна частина викидається, а зернова частина накопичується у зерновому бункері. Зернозбиральний комбайн так само має перевантажувальний пристрій 9, який бере на себе вивантаження зернового бункера, при цьому перевантаження зібраного врожаю із зернового бункера на вантажний транспортний засіб 3 і/або транспортний контейнер 5 здійснюється за допомогою пересипного пристосування 10 та відкидного щитка 11 перевантажувального пристосування. Перевантаження зібраного врожаю і, відповідно, вивантаження зернового бункера може здійснюватися безперервно під час руху у процесі збирання врожаю або з перервами. Саме при безперервному підбиранні збираного врожаю є необхідним не обтяжувати водія при цій роботі додатково іншими обов'язками, щоб забезпечити його повну сконцентрованість на процесі збирання врожаю. Зменшення навантаження на водія, згідно з винаходом, базується на тому, що перевантаження врожаю може здійснюватися повністю автоматично. Для повністю автоматичного перевантаження необхідно за допомогою навігаційної системи 6 визначати фактичні місцеположення транспортних засобів-учасників 1 - збиральної машини 2 та вантажного транспортного засобу 3. Для цього самохідна збиральна машина 2 і вантажний транспортний засіб 3, а також його транспортний контейнер 5 обладнані GPS-антенами 7. Навігаційна система 6 потрібна, щоб, з одного боку, 95459 10 надавати можливість координування між транспортними засобами-учасниками 2, 3, а з іншого боку, визначати габарити вантажного транспортного засобу 3 і/або транспортного контейнера 5 і ці специфічні дані про вантажний транспортний засіб 3 і/або транспортний контейнер 5 надсилати до запам'ятовуючого пристрою (не показаний). Ці спеціальні дані необхідні для точної керуючої системи 12 пересипного пристосування 10. За сумою зареєстрованих даних, що складаються із різних машинних та пов'язаних з умовами збирання врожаю параметрів, обчислюється теоретична точка падіння 13 струменя зібраного врожаю 14 на транспортному контейнері 5 і долучається до керування пересипним пристосуванням 10 та відкидним щитком 11 пересипного пристосування. Для того, щоб надалі скорочувати втрати врожаю при перевантаженні зібраної продукції, згідно з винаходом, пропонується для точки падіння 13 струменя перевантажуваної продукції 14 визначати область дозволеності 15, яка знаходиться всередині обмеження вантажної площі 17. Вантажна площа 17 визначається контуром транспортного контейнера 5. Для зменшення втрат врожаю необхідно струмінь перевантажуваної продукції 14 не наближати до контуру транспортного контейнера 5, а витримувати певний проміжок до нього. Розмір цього проміжку однак повинен бути змінно регульований на основі різних залежних від машини та умов збирання врожаю параметрів. Щоб для точки падіння 13 струменя перевантажуваної продукції 14 утримувати визначений проміжок до контуру 18 транспортного контейнера, навколо контуру останнього створюється зона із замкненим контуром 16, яка являє собою заборонену зону 23 для точки падіння 13 струменя перевантажуваної продукції 14. Зона із замкненим контуром 16 утворюється з однієї сторони зовнішнім обмеженням 19, а з іншої сторони внутрішнім обмеженням 20. Зовнішнє обмеження 19 зони із замкненим контуром 16 регламентується контуром 18 транспортного контейнера, при цьому внутрішнє обмеження 20 цієї зони визначає область дозволеності 15 для теоретичної зони завантаження 22. Зона завантаження 22 і зона із замкненим контуром 16 утворюють разом вантажну площу 17. Як вже зазначалося раніше, внутрішнє обмеження 20 зони із замкненим контуром 16 може змінюватися у ході робіт із збирання та, відповідно, перевантаження врожаю і таким чином налаштовуватися під умови цих робіт, причому внутрішнє обмеження 20 зони із замкненим контуром 16 у поданому на Фіг. прикладі утворюється із чотирьох внутрішніх обмежувальних ліній 24, 25, 26 і 27. Кожні дві обмежувальні лінії 24, 26 та 25, 27 приблизно паралельно віддалені і задані контуром 18 транспортного контейнера. Інші геометричні контури 18 транспортного контейнера зумовлюють встановлення інших геометричних внутрішніх обмежувальних ліній. Зміна внутрішнього обмеження 20 зони із замкненим контуром 16 може стосуватися всіх чотирьох обмежувальних ліній 24, 25, 26, 27. Можливою є також зміна кожної окремої обмежувальної лінії на підставі залежних від машини та умов збирання врожаю параметрів. Наприклад, всі 11 95459 чотири обмежувальні лінії 24, 25, 26, 27 можуть змінюватися із зміною діаметра насипного конуса 21, або дві обмежувальні лінії 25, 27 - із нахилом транспортного контейнера 5, який перебуває у похилому положенні з ґрунтом поля. Інша зміна внутрішніх обмежувальних ліній 24, 26 може випливати, наприклад, із врахування вітрового режиму. Можливою є також зміна лише однієї із чотирьох обмежувальних ліній. Зміни внутрішніх обмежувальних ліній 24, 25, 26, 27 завжди мають наслідком зміну області дозволеності 15 для точки падіння 13 струменя перевантажуваної продукції 14 і, отже, для теоретичної зони завантаження 22. Ця теоретична зона завантаження 22 настроюється в залежності від пересипного пристосування 10, причому пересипне пристосування 10 у зернозбиральному комбайні може складатися із вивантажувальної труби зернового бункера, а у косарки-подрібнювача - із викидного коліна. Перевантаження зібраного врожаю із збиральної машини 2 на вантажний транспортний засіб 3 може здійснюватися безперервно або з зупинками. Між збиральною машиною 2 і вантажним транспортним засобом 3 існує дальній зв'язок, що складається із системи передачі даних 8. Система передачі даних 8 надає у розпорядження маршрут передачі даних. За допомогою цього маршруту передачі даних дані можуть обмінюватися для координації транспортних засобів та керування пересипним пристосуванням 10. Комп’ютерна верстка Н. Лиcенко 12 Перелік посилальних базових позначень 1. Рухомі колісні транспортні засоби 2. Збиральна машина 3. Вантажний транспортний засіб 4. Колісний тягач 5. Транспортний контейнер 6. Навігаційна система 7. GPS-антени 8. Система передачі даних 9. Перевантажувальний пристрій 10. Пересипне пристосування 11. Відкидний щиток пересипного пристосування 12. Керуюча система 13. Точка падіння 14. Струмінь перевантажуваної продукції 15. Область дозволеності 16. Зона із замкненим контуром 17. Вантажна площа 18. Контур транспортного контейнера 19. Зовнішнє обмеження 20. Внутрішнє обмеження 21. Насипний конус 22. Зона завантаження 23. Заборонена зона 24. Обмежувальна лінія 25. Обмежувальна лінія 26. Обмежувальна лінія 27. Обмежувальна лінія Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSelf-propelled agricultural harvesting machine with controllable transfer device
Автори англійськоюBrunnert Andreas, Meyer zu Helligen Lars, Nienaber Gerhard, Diekhans Norbert
Назва патенту російськоюСамоходная сельскохозяйственная уборочная машина с управляемым перегрузочным устройством
Автори російськоюБруннерт Андреас, Мейер цу Хеллиген Ларс, Нинабер Герхард, Дикханс Норберт
МПК / Мітки
МПК: G05D 1/02, A01D 90/00, A01D 87/00, A01D 43/00, A01D 13/00, A01D 41/127
Мітки: пристроєм, збиральна, перенавантажувальним, машина, керованим, сільськогосподарська, самохідна
Код посилання
<a href="https://ua.patents.su/6-95459-samokhidna-silskogospodarska-zbiralna-mashina-z-kerovanim-perenavantazhuvalnim-pristroehm.html" target="_blank" rel="follow" title="База патентів України">Самохідна сільськогосподарська збиральна машина з керованим перенавантажувальним пристроєм</a>
Самохідна збиральна машина

Номер патенту: 73505
Опубліковано: 15.08.2005
Автор: Шверсманн Бертольд
МПК: A01F 17/00, A01D 34/00, A01D 41/00
Мітки: збиральна, самохідна, машина
Формула / Реферат:
1. Самохідна збиральна машина, зокрема зернозбиральний комбайн, щонайменше з одним щонайменше частково розташованим у роторному корпусі і обладнаним приводом обертання сепаруючим ротором, розташований спереду за напрямком руху машини, кінець якого встановлений щонайменше в одному підшипнику, розміщеному у фронтальному щитку, що частково перекриває вхідний отвір роторного корпусу, при цьому щонайменше одна з нижніх відбортовок фронтального...
Сільськогосподарська збиральна машина з перевантажувальним пристроєм
Номер патенту: 92600
Опубліковано: 25.11.2010
Автори: Ердманн Хуберт, Фреріхс Людгер, Хафферт Андреас
МПК: A01B 73/00, A01D 43/00
Мітки: перевантажувальним, машина, сільськогосподарська, збиральна, пристроєм
Формула / Реферат:
1. Сільськогосподарська збиральна машина (2), зокрема самохідний польовий подрібнювач (1), з розташованим на ній поворотним навколо вертикальної осі обертання (28) та горизонтальної осі (38) перевантажувальним пристроєм (29) для перевантаження збираної сільськогосподарської продукції на транспортний засіб, який здатний повертатися в робоче положення експлуатації і в транспортувальне положення експлуатації, і з різними робочими агрегатами...
Збиральна машина

Номер патенту: 66817
Опубліковано: 15.06.2004
Автори: Хайд'ян Франц, Фьогелінг Вальтер, Дамман Мартін, Шпеккамп Дірк, Кюн Бодо, Арнольд Андреас
МПК: A01F 12/30, A01D 41/00
Формула / Реферат:
1. Збиральна машина, зокрема зернозбиральний комбайн, з сепаратором для відокремлення зернової маси від маси рослинних залишків, за яким встановлено соломотряс, причому для подачі маси від сепаратора на соломотряс передбачений подавальний вузол з напрямними зубцями, яка відрізняється тим, що містить принаймні один скидальний елемент (12) для скидання маси з вільних кінців (11) напрямних зубців (8).2. Збиральна машина за п. 1, яка...
Сільськогосподарська збиральна машина (варіанти)

Номер патенту: 71578
Опубліковано: 15.12.2004
Автори: Тіманн Холгер, Улендінг Хуберт
МПК: A01D 75/00
Мітки: машина, варіанти, сільськогосподарська, збиральна
Формула / Реферат:
1. Сільськогосподарська збиральна машина з корпусом і привідною головною віссю ходової частини, на кінцях якої поворотно встановлені за допомогою проміжного підключення зубчастих передач або безпосередньо ходові колеса, а також з переставними пристроями, що здійснюють горизонтальне вирівнювання корпусу машини або ходових коліс на нерівній місцевості, з фронтальним пристроєм, сполученим з корпусом машини через регульований поворотний пристрій...
Сільськогосподарська збиральна машина

Номер патенту: 75588
Опубліковано: 15.05.2006
Автори: Шверсманн Бертольд, Гоголін Грегор
МПК: A01D 41/00, A01F 7/00, A01F 12/44
Мітки: машина, збиральна, сільськогосподарська
Формула / Реферат:
1. Сільськогосподарська збиральна машина із засобами для вивільнення суплідь із збираної сільськогосподарської маси та для виділення їх з цієї маси, причому щонайменше вивільнення суплідь із збираної маси і часткове попереднє виділення їх з цієї маси відбувається в утвореній молотильними органами зоні обмолоту, а до виходу цієї зони приєднана щонайменше одна зона сепарації для поділу збираної маси та відокремлення суплідь, що утворена...
Попередній патент: Вакцина проти pcv-2 у mda-позитивних поросят
Наступний патент: Похідна сполука феніламідину, способи їх одержання та способи боротьби із фітопатогенними грибами сільськогосподарських культур та зі шкідливими комахами
Випадковий патент: Магістраль трансфузійно-інфузійна для одноголкового проточного плазмаферезу