Самохідна сільськогосподарська збиральна машина з пристроєм виміру втрат зерна
Номер патенту: 96276
Опубліковано: 25.10.2011
Автори: Цурхаке Крістіан, Бруне Маркус, Баумгартен Йоахім
Формула / Реферат
1. Самохідна збиральна машина (1), зокрема зернозбиральний комбайн (2), з пристроєм виміру втрат зерна (21) для решіт (12, 13) очищувального пристрою (11) з щонайменше одним розташованим на задньому кінці очищувального пристрою (11) сенсорним датчиком (22), яка відрізняється тим, що сенсорний датчик (22) розташований в кінці очищувального пристрою (11) позаду щонайменше одного решета (12, 13) таким чином, що складові частини збираної продукції, які просипаються на сенсорну поверхню (38) датчика і фракції збираної маси , які ним детектуються, залишаються у збиральній машині (1) та подаються на обробку у напрямку повернення збираної маси.
2. Самохідна збиральна машина (1) за п. 1, яка відрізняється тим, що сенсорна поверхня (38) датчика розташована не паралельно до поверхні решітки (20), прилягаючої до щонайменше одного решета (12, 13), а під певним кутом (43) нахилена до очищувального пристрою (11).
3. Самохідна збиральна машина (1) за одним з попередніх пунктів, яка відрізняється тим, що позиціонування визначається опорою датчика (29), яка має декілька функціональних ділянок, що утворені із щонайменше одного отвору (31), щонайменше одного кріпильного елемента (33) та щонайменше одного напрямного елемента (32).
4. Самохідна збиральна машина (1) за п. 3, яка відрізняється тим, що щонайменше один отвір (31) призначений для приймання сенсорного датчика (22).
5. Самохідна збиральна машина (1) за одним з пунктів 3-4, яка відрізняється тим, що щонайменше один кріпильний елемент (33) призначений для кріплення опори датчика (29) до постачального донного механізму (39) метального розкидача полови (17).
6. Самохідна збиральна машина (1) за одним з пунктів 3-5, яка відрізняється тим, що напрямний елемент (32) виконаний східчастим.
7. Самохідна збиральна машина (1) за одним з пунктів 3-6, яка відрізняється тим, що на щонайменше одному кінці напрямного елемента (32) розташована подовжувальна мата (34).
8. Самохідна збиральна машина (1) за одним з попередніх пунктів, яка відрізняється тим, що пристрій виміру втрат (21) продувається потоком повітря (37), вироблюваного за допомогою очищувальної повітродувки (14).
9. Самохідна збиральна машина (1) за одним з попередніх пунктів, яка відрізняється тим, що довжина та ширина сенсорного поля розподілені по ширині решета на окремі часткові сенсорні поверхні (38) датчика.
10. Самохідна збиральна машина (1) за одним з попередніх пунктів, яка відрізняється тим, що сенсорна поверхня (38) та опора (29) датчика рознімно або нерознімно з'єднані одна з одною.
11. Самохідна збиральна машина (1) за п. 10, яка відрізняється тим, що сенсорна поверхня (38) датчика технічно литтям під тиском з'єднана з опорою (29) датчика.
12. Самохідна збиральна машина (1) за одним з пунктів 10-11, яка відрізняється тим, що сенсорна поверхня (38) датчика еластично та з гасінням коливань з'єднана з опорою (29) датчика.
13. Самохідна збиральна машина (1) за одним з пунктів 10-12, яка відрізняється тим, що опора (29) датчика по контуру навколо сенсорної поверхні (38) датчика має конусне звуження у матеріалі.
Текст
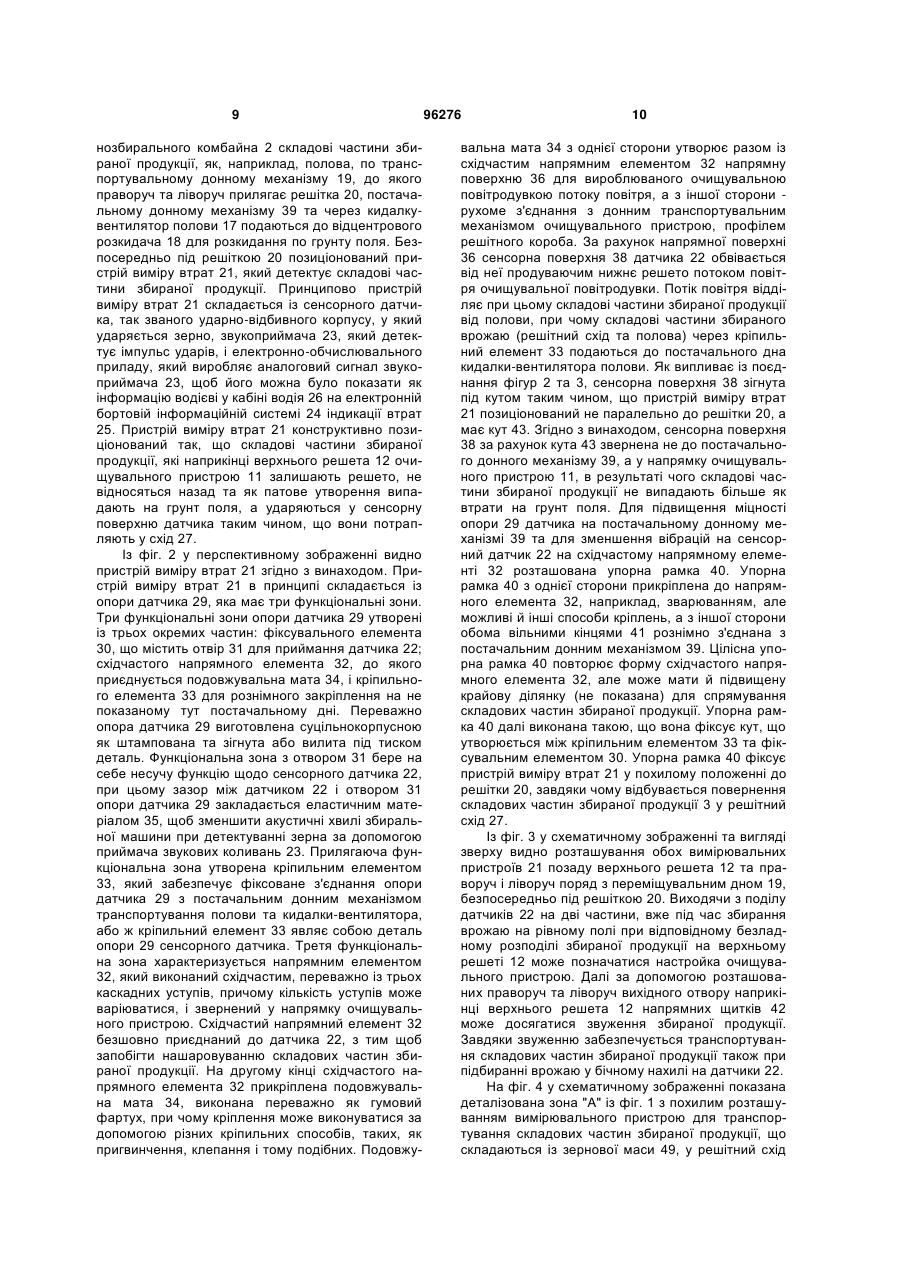
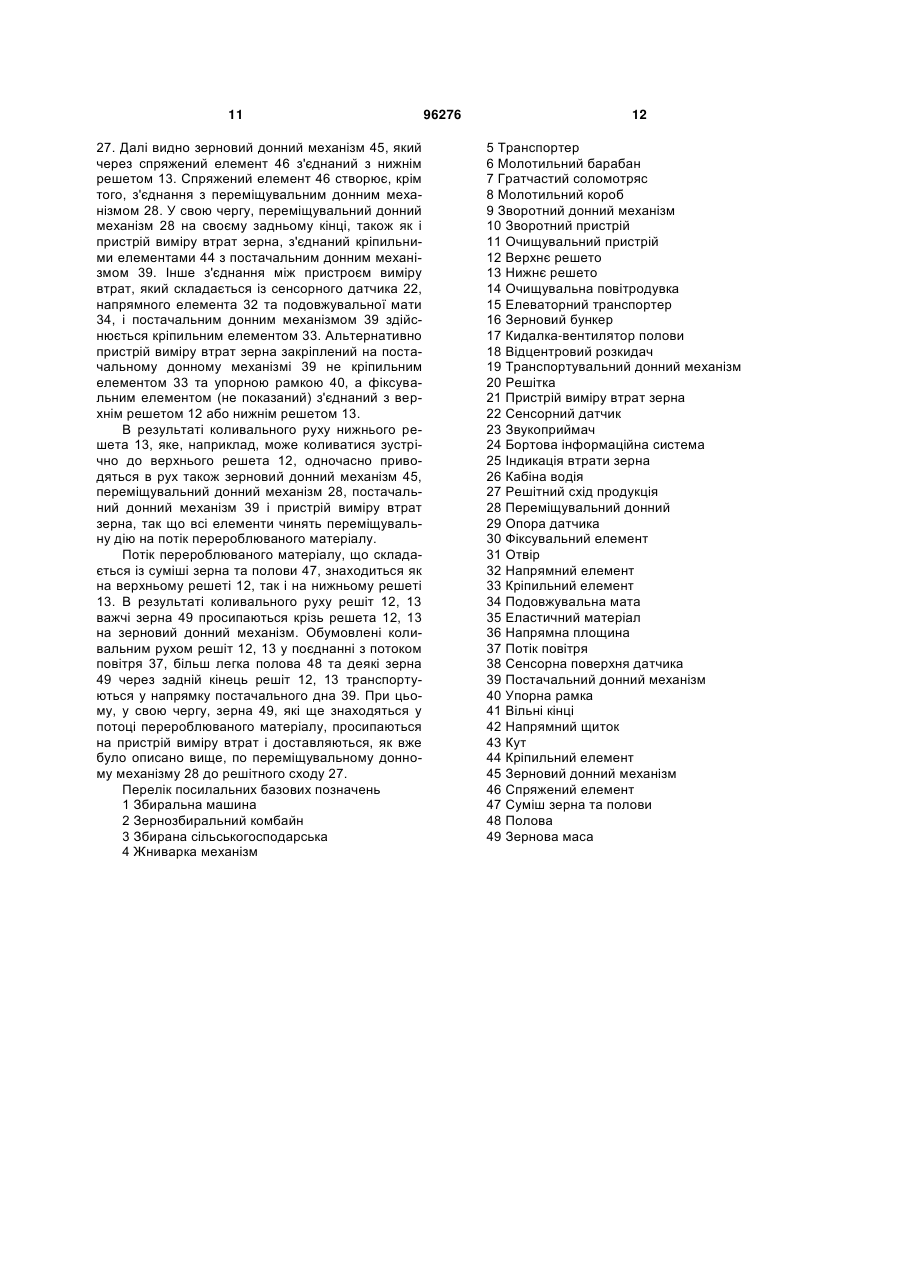
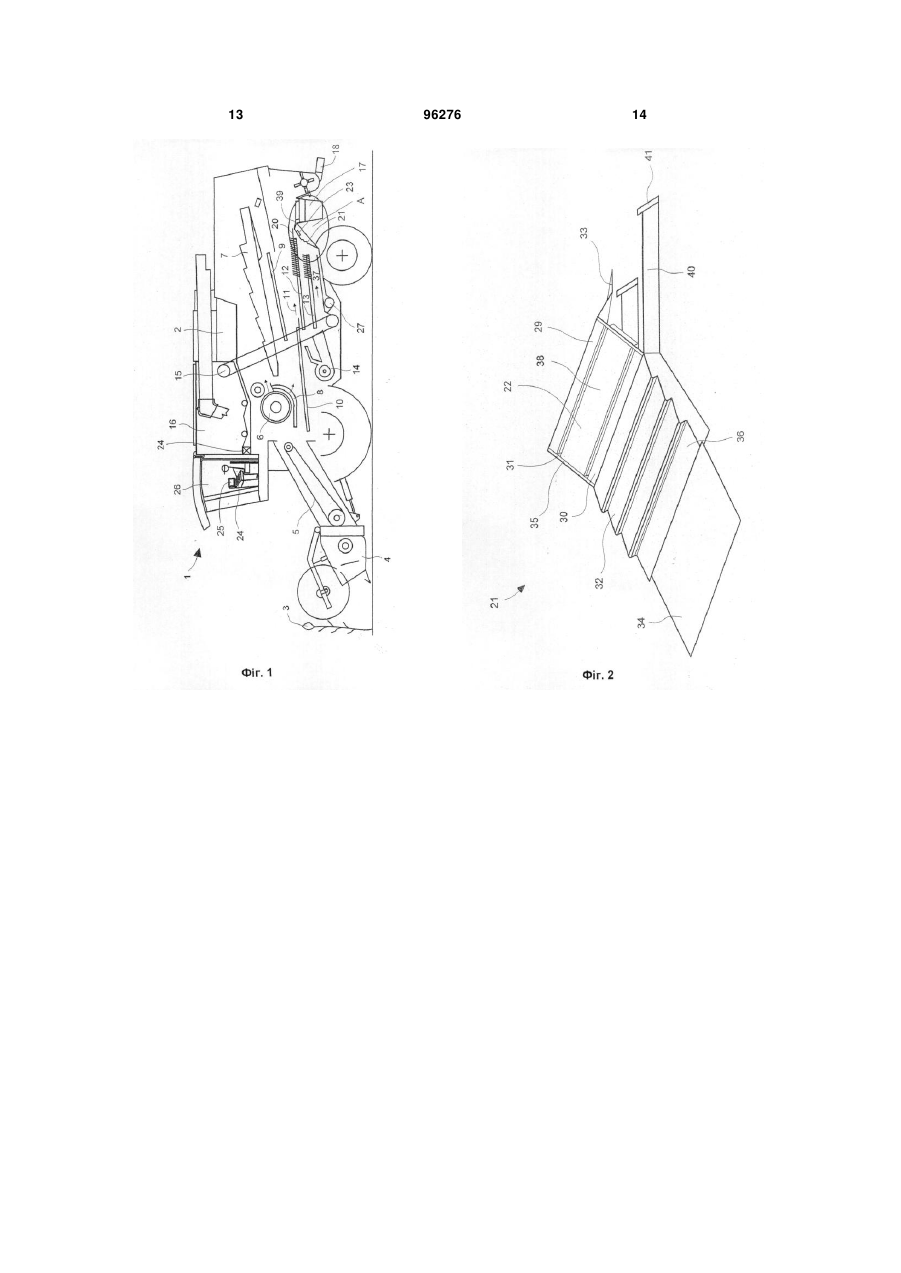
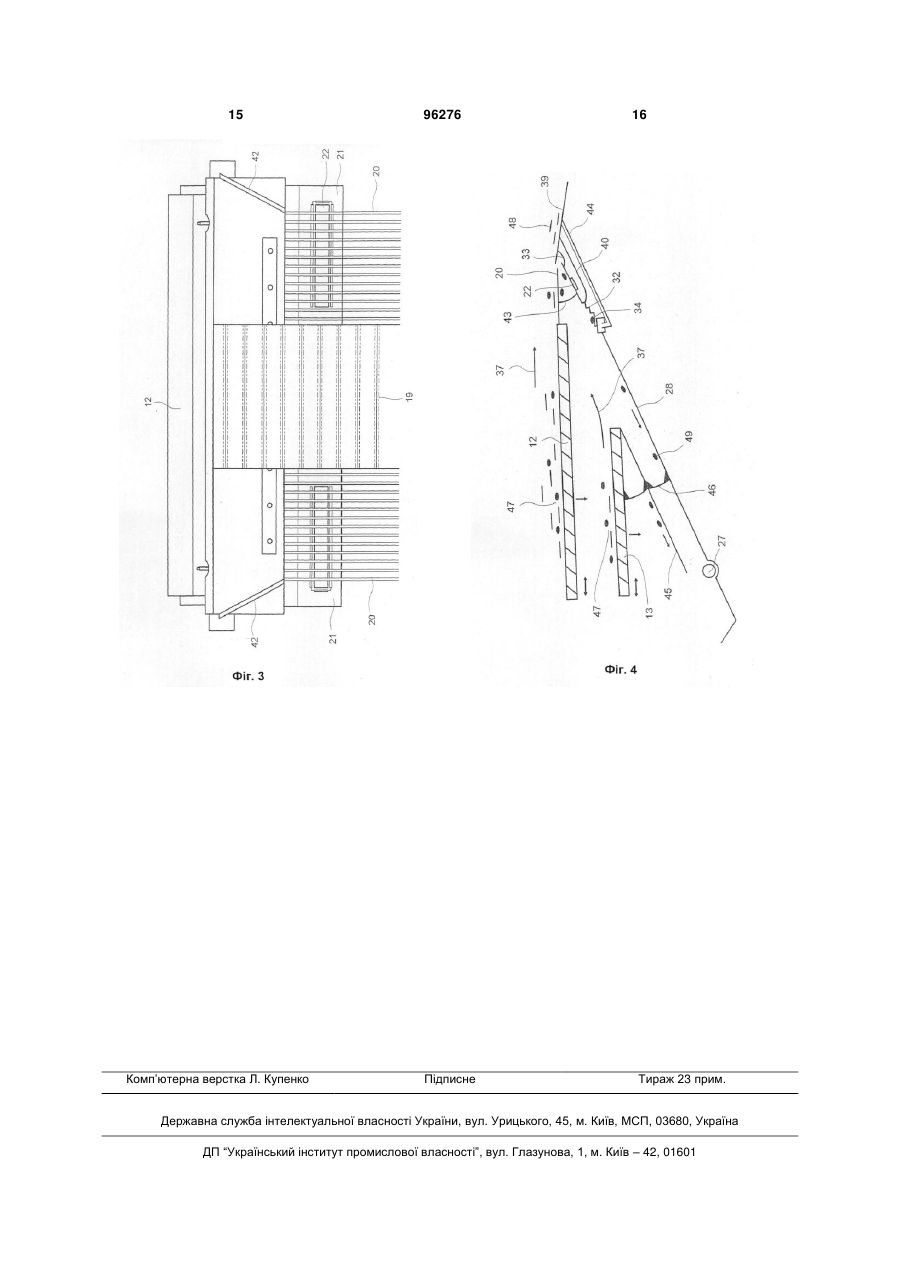
1. Самохідна збиральна машина (1), зокрема зернозбиральний комбайн (2), з пристроєм виміру втрат зерна (21) для решіт (12, 13) очищувального пристрою (11) з щонайменше одним розташованим на задньому кінці очищувального пристрою (11) сенсорним датчиком (22), яка відрізняється тим, що сенсорний датчик (22) розташований в кінці очищувального пристрою (11) позаду щонайменше одного решета (12, 13) таким чином, що складові частини збираної продукції, які просипаються на сенсорну поверхню (38) датчика і фракції збираної маси , які ним детектуються, залишаються у збиральній машині (1) та подаються на обробку у напрямку повернення збираної маси. 2. Самохідна збиральна машина (1) за п. 1, яка відрізняється тим, що сенсорна поверхня (38) датчика розташована не паралельно до поверхні решітки (20), прилягаючої до щонайменше одного решета (12, 13), а під певним кутом (43) нахилена до очищувального пристрою (11). 3. Самохідна збиральна машина (1) за одним з попередніх пунктів, яка відрізняється тим, що позиціонування визначається опорою датчика (29), яка має декілька функціональних ділянок, що утворені із щонайменше одного отвору (31), що 2 (19) 1 3 96276 4 13. Самохідна збиральна машина (1) за одним з пунктів 10-12, яка відрізняється тим, що опора (29) датчика по контуру навколо сенсорної поверхні (38) датчика має конусне звуження у матеріалі. Даний винахід стосується галузі сільського господарства в цілому та переробки продукції збираного врожаю зокрема. Для цього застосовуються транспортні засоби, зокрема самохідні сільськогосподарські збиральні машини, які призначенні для підбирання врожаю та переробки матеріалу. Під самохідними сільськогосподарськими збиральними машинами розуміються, як правило, зернозбиральні комбайни, які оснащені пристроями для переробки та механізмами для транспортування збираної продукції. Таким транспортувальним механізмом є, наприклад, очищувальний пристрій, яким збирана продукція розділяється на зернові та незернові складові частини. Такий очищувальний пристрій складається, наприклад, з повітродувки, верхнього решета та нижнього решета, причому верхнє та нижнє решета виконані як регульоване пластинчасте решето і продуваються створюваним повітродувкою потоком повітря. Крупні та легкі незернові складові частини, перш ніж вони досягнуть верхнього решета, підхоплюються потоком повітря і осідають у задньому кінці зернозбирального комбайна. Як і потік повітря, транспортуванню зернових та незернових складових частин до заднього кінця верхнього решета сприяє також коливальний рух решіт. Зернові та незернові складові частини, в залежності від настройки ширини просвітів верхнього решета, з одного боку, просипаються на нижнє решето, а, з другого боку, від сенсорного датчика, що складається з ударно-відбивного корпусу, вилітають із заднього кінця зернозбирального комбайна. Ударно-відбивний корпус може містити один або декілька приймачів звукових коливань для детектування зернових складових частин. Сенсорні датчики детектують зернові складові частини, які через налиплі незернові складові частини не провалюються крізь верхнє решето. Ця складова частина збираної продукції, що покидає зернозбиральний комбайн, позначається як втрата при очищенні. Щоб брати на облік втрати зерна при очищенні, з рівня техніки відомі різні самохідні сільськогосподарські збиральні машини, зокрема зернозбиральні комбайни, з пристроєм виміру втрат для решіт очищувального пристрою з щонайменше одним, розташованим у задньому кінці очищувального пристрою, сенсорним датчиком. Принципово пристрій виміру втрат складається із сенсорного датчика, так званого ударно-відбивного тіла, у яке ударяється зерно, а також звукоприймача, що детектує імпульс ударів, та електроннообчислювального блока, який виробляє аналоговий сигнал звукоприймача, щоб його можна було належним чином представити як інформацію водієві на електронній бортовій інформаційній системі в індикації втрат. Сенсорний датчик такого типу відомий із патентної заявки DE 197 25 028 А1. Однак цей вид да тчиків при детектуванні зернового матеріалу виявляє слабкі сторони. Так, сенсорний датчик в результаті фіксовано пригвинченого на рамі машини монтажного положення є дуже залежним від поздовжнього нахилу, внаслідок чого зерновий матеріал може перелітати повз датчик і тим самим не детектуватися. Має також недоліки сенсорний датчик і в обмолоті ріпаку, тому що зерновий матеріал недостатньо розпізнається через малу вагу. У патентній заявці ЕР 0 093 991 В1 розкрито відомості про такого роду пристрій виміру втрат зерна для решіт очищувального пристрою зернозбиральних комбайнів, який містить передбачені у задньому кінці очищувального пристрою сенсорні датчики. Недолік цієї конструктивної системи датчиків полягає у тому, що зерна, які просипаються на чутливий елемент крізь решітчастий екранований пристрій, після детектування вилітають на грунт поля як втрати при очищенні і не розподіляються, внаслідок чого може виникнути так зване патове утворення. Це патове утворення пізніше із проростанням зерна та подальшим зростанням рослин перетворюється у небажану зелену смугу на полі. В інших виконаннях у рівні техніки сенсорні датчики інтегровані у/або поверх постачального механізму, наприклад, постачального транспортувального дна кидалки полови. Хоча таким чином зерновий матеріал детектується, проте кидалкоювентилятором полови розкидається до відцентрового розкидача соломи. Той, у свою чергу, потім викидає зерна разом з соломою на грунт поля за шириною захвату жниварки. Транспортування полови від кидалки-вентилятора полови до відцентрового розкидача соломи здійснюється у спрямованому струмені за допомогою повітря. Відцентровий розкидач соломи обладнаний для цього отвором для приймання полови у напрямку руху машини. В результаті такої конструктивної побудови стрижневі частинки із зернових та незернових складових частин кожної миті можуть з великою швидкістю відкидатися назад та породжувати додаткові сигнали на сенсорних датчиках. Це означає, що через відсіювання полови та внаслідок дій відцентрового розкидача соломи або постачального транспортувального дна заміри пристрою виміру втрат зазнають негативних впливів і вираховується та показується на індикаторі більш висока втрата зерна при очищенні, ніж існує насправді, що, таким чином, може потягти за собою помилкове встановлення очищувальних решіт та ширини просвітів верхнього решета, в результаті чого, у свою чергу, більше неповноцінних складових частин збираної продукції забруднюватимуть у зерновому бункері повноцінні складові частини. Щоб скоротити або мінімізувати в подальшому під час процесу очищення втрату повноцінних складових частин збираного врожаю, причому під 5 повноцінними складовими частинами збираного врожаю розуміються плодові компоненти кукурудзи, гороху, квасолі, пшениці, ячменя, жита, ріпаку та райграсу, необхідно ще точніше визначати точку зустрічі складових частин збираної продукції із сенсорним датчиком та тримати його вільним від незернових складових частин. В основі винаходу покладена задача створити пристрій виміру втрат зерна згаданого раніше типу, який би був позбавлений зазначених недоліків відомих з рівня техніки пристроїв, і запропонувати технічне рішення, яке б надавало можливість підтримувати і відповідно зменшувати навантаження на процес очищення, з тим щоб можна було виключити втрату складових частин збираної продукції через нераціональне позиціонування сенсорних датчиків. Згідно з винаходом, ця проблема вирішується за допомогою відмітних ознак пункту 1 патентної формули. Переважні форми виконання та дальшого розвитку винаходу випливають із залежних пунктів формули та подальшого опису. Розташування датчика наприкінці очищувального пристрою позаду щонайменше одного решета таким чином, що складові частини збираної продукції, які просипаються на поверхню датчика та детектуються ним, залишаються у збиральній машині і подаються до пристрою повернення решітного сходу, надає, зокрема, перевагу у тому, що вони можуть сепаруватися знов та не викидаються кидалкою-вентилятором полови як втрата на грунт поля і, отже, до кидалки-вентилятора полови потрапляють лише незернові складові частини. У переважному наступному розвитку винаходу сенсорна поверхня розташована не паралельно до поверхні прилягаючої щонайменше до одного решета решітки. Кут спряження між обома цими поверхнями встановлюється таким, щоб сенсорна поверхня датчика була розташована відверненою від відцентрового розкидача соломи і з нахилом до очищувального пристрою. Завдяки такому розташуванню та положенню сенсорного датчика істотно зменшується загроза того, що турбулентно переносимі назад під дією метального розкидача полови і/або відцентрового розкидача соломи частинки полови і/або соломи потраплятимуть на поверхню датчика та негативно впливатимуть на результати виміру. Цим самим виключається помилкове встановлення ширини просвітів решета та його пропускної здатності. В результаті спадання складових частин збираної продукції з верхнього решета крізь решітку на сенсорну поверхню датчика ударна швидкість складових частин збираної продукції для створення великої амплітуди загасаючого коливання для детектування приймачем звукових коливань є визначальним фактором висоти амплітуди і легко піддається впливу шляхом зміни висоти падіння складових частин збираної продукції. Ударна позиція збираної продукції також має значний вплив на сигнал датчика. Чим далі віддалена ударна позиція складових частин збираної продукції від датчика, тим меншою стає амплітуда. Також завдяки малій висоті падіння та похилому положенню сенсорної поверхні датчика 96276 6 виключаються для датчика помилкові виміри складових частин збираної продукції через поздовжній нахил самохідної сільського господарської машини при збиранні врожаю. Розташовані паралельно до поверхні решітки або інших поверхонь решіт сенсорні поверхні датчиків мають недолік залежності від поздовжнього нахилу збиральної машини. При робочій їзді по схилах поля створюється поздовжній нахил, при якому складові частини збираної продукції летять поза сенсорну поверхню датчика і таким чином не можуть більше детектуватися, в результаті чого, у свою чергу, виникають помилкові виміри. Постійне повертання складових частин збираної продукції у схід з решета досягається тим, що для кріплення сенсорного датчика згідно з винаходом була створена одно- або багатоелементна опора датчика з кількома функціональними ділянками. Переважно три функціональних ділянки утворюються щонайменше одним отвором, щонайменше одним кріпильним елементом і щонайменше одним напрямним елементом. Отвір призначений переважно для встановлення датчика. Кріпильний елемент переважно служить для закріплення опори датчика на постачальному донному механізмі кидалки-вентилятора полови. Напрямний елемент виконаний переважно східчастим, подібно до каскадних уступів. У переважному наступному розвитку винаходу на щонайменше одному кінці напрямного елемента розташована рухома подовжувальна мата, переважно гумовий елемент, який утворює рухоме з'єднання з коробчастим профілем решета. Щоб обмежити вібраційну властивість опори сенсорного датчика, на східчастому напрямному елементі розташована упорна рамка. Упорна рамка може бути прикріплена на східчастих уступах будь-яким кріпильним способом, таким, наприклад, як зварювання, паяння, пригвинчування, клепання або тому подібним. Вільні кінці упорної рамки служать додатковому кріпленню опори датчика до постачального дна кидального розподільника полови. В іншій формі виконання упорної рамки вона така само служить для кріплення до опори датчика, а своїми вільними кінцями кріпиться до кінцевого профілю, який приєднується до верхнього або нижнього решета, завдяки чому не потрібне кріплення упорної рамки до дна постачального механізму. Подовжувальна мата та східчастий напрямний елемент утворюють свого роду напрямну поверхню для проникаючого між нижнім решетом та коробчастим профілем решета потоку повітря, вироблюваного очищувальною повітродувкою, завдяки чому пристрій виміру втрат обдувається потоком повітря, так що складова частина збираної продукції, яка вдаряється у подовжувальну мату, напрямну поверхню та сенсорну поверхню датчика, дістає додаткове очищення. Потік повітря відокремлює при цьому зернові складові частини збираної продукції від полови, при чому полова доставляється до кидалки-вентилятора полови, а зернові складові частини врожаю - до решітного сходу. Зернові складові частини збираної продукції, що повертаються таким чином у цикл перероб 7 ки, з решітним сходом знов доставляються до молотильного та очищувального процесів і тим самим не можуть породжувати патове утворення на полі. Завдяки спрямуванню повітря повітродувки на подовжувальну мату та уступчасту поверхню, а також східчасту напрямну поверхню напрямного елемента, додатково очищається прилягаюча до них сенсорна поверхня датчика і відповідно зберігається вільною від осадів. На основі обробки виміряних результатів при дослідах ударювання складових частин збираної продукції у поверхню датчика в подальшому було встановлено, що для реєстрації втрат складових частин збираної продукції у процентному відношенні понад 95 % всього обсягу є достатньою довжина ударно-відбивного тіла, дорівнююча 60 % ширини решітного короба. Тож розташування сенсорного датчика по всій ширині очищувального пристрою у цьому випадку є непотрібним. Необхідні довжина та ширина сенсорного поля за шириною решета в окремих часткових сенсорних поверхнях можуть розподілятися, наприклад, на два, три або чотири окремі сенсорні датчики, щоб досягти точного інформування про те, як відбувається поперечний розподіл втрат зерна при очищенні. З інформуванням про поперечний розподіл втрат при очищенні вже заздалегідь стає можливим точне настроювання очищувального пристрою. Переважно два часткові датчики розподілені праворуч та ліворуч по ширині і розташовані наприкінці очищувального пристрою, при цьому довжина кожного датчика перекриває приблизно до 30% ширини решітного короба. Таким чином, у процентному відношенні системою спостереження надійно розпізнається більш ніж 95 % втрат складових частин. Сенсорна поверхня та опора датчика з'єднані між собою переважно рознімно або нерознімно. Для уникнення спотворюючих результат виміру забруднень важливо, щоб між сенсорною поверхнею і опорою датчика не було щілини, в якій могли б збиратися складові частини збираної продукції. Якщо опора датчика виготовлена, наприклад, із пластмасового матеріалу, то сенсорна поверхня, наприклад, технічно литтям під тиском, може бути сполучена з опорою датчика, причому місце злиття може бути виконане уступами або, для підвищення міцності сполучення, двома прямокутно зігнутими одна до одної полицями. Тобто, одна прямокутна полиця була б шарнірно приєднана до сенсорної поверхні датчика, а друга прямокутна полиця -до опори датчика, так що обидві полиці були б розташовані двома паралельними поверхнями одна до одної, завдяки чому створювалася б більша поверхня сполучення з вищою міцністю. Але обидві полиці можуть сполучатися також й різними кріпильними засобами, переважно нерознімно - клепанням, або рознімно - пригвинчуванням. Місце стикування, що утворюється у формі зазору між обома полицями, заповнюється, наприклад, еластичним матеріалом, щоб запобігти утворенню забруднень. Розташований наприкінці очищувального пристрою пристрій виміру втрат на підставі свого розташування бере на себе транспортувальну функ 96276 8 цію для потрапляння збираної продукції, що ударяється в нього, у решітний схід, при цьому опора датчика набуває функції еластичної та гасячої коливання опори сенсорної поверхні. Опора сенсорного датчика може бути виконана з будь-якого матеріалу, такого, наприклад, як метал або пластмаса. Якщо опора датчика складається, наприклад, із металу, то сполучення з сенсорною поверхнею, що вставляється у передбачений отвір опори датчика, проводиться за допомогою еластичного матеріалу. Як еластичні матеріали придатні, наприклад, різні силікони або, в залежності від того, який технологічний метод використовується при монтажі, - також матеріали, що знаходять застосування при способі вулканізації, наприклад, EPDM (суміш етилен-пропілен-дієн-каучуку). Далі опора датчика може мати по контуру навколо сенсорної поверхні датчика певні конусні звуження в матеріалі, завдяки чому опора датчика формується еластичною і позитивно поліпшуються її демпфірувальні властивості, так що створювані збиральною машиною вібрації менше та з послабленням впливають на результат виміру сенсорного датчика. Приклад виконання винаходу суто схематично представлений на кресленнях і більш докладно описується далі. Він показує: Фіг. 1 - схематичне зображення зернозбирального комбайна з пристроєм виміру втрат зерна для очищувального пристрою; Фіг. 2 - перспективне зображення пристрою виміру втрат у комплекті; Фіг. 3 - схематичний вигляд зверху приєднаних до кінця верхнього решета та нижче решітки вимірювальних пристроїв і Фіг. 4 - у схематичному зображенні деталізовану зону "А" із фіг. 1. На фіг. 1 у схематичному зображенні показана самохідна сільськогосподарська збиральна машина 1, яка призначена для підбирання та переробки збираної продукції 3. Під самохідною сільськогосподарською збиральною машиною 1 мова йде про зернозбиральний комбайн 2, оснащений жниваркою 4, яка за допомогою транспортера 5 доставляє збирану продукцію 3 до молотильного барабана 6, до якого прилягає ґратчастий соломотряс 7. Під молотильним коробом 8 та ґратчастим соломотрясом 7 знаходяться зворотний донний механізм 9 та зворотний пристрій 10, які доставляють сепаровану збирану продукцію 3 до очищувального пристрою 11, що складається з верхнього решета 12 та нижнього решета 13. Решета 12, 13 забезпечуються через очищувальну повітродувку 14 очищувальним повітрям, яке спрямовується крізь та поверх решіт 12, 13. Очищена збирана продукція 3 потрапляє по елеваторному транспортеру 15 у зерновий бункер 16 і там накопичується. Переміщувана за допомогою ґратчастого соломотряса 7 складова частина збираної продукції, як, наприклад, солома, доставляється через нижню частину зернозбирального комбайна 2 до відцентрового розкидача 18, який розкидає складові частини збираної продукції по грунту поля. Також переміщувані через решета 12,13 під дією руху решіт та очищувального повітря до заднього кінця зер 9 нозбирального комбайна 2 складові частини збираної продукції, як, наприклад, полова, по транспортувальному донному механізму 19, до якого праворуч та ліворуч прилягає решітка 20, постачальному донному механізму 39 та через кидалкувентилятор полови 17 подаються до відцентрового розкидача 18 для розкидання по грунту поля. Безпосередньо під решіткою 20 позиціонований пристрій виміру втрат 21, який детектує складові частини збираної продукції. Принципово пристрій виміру втрат 21 складається із сенсорного датчика, так званого ударно-відбивного корпусу, у який ударяється зерно, звукоприймача 23, який детектує імпульс ударів, і електронно-обчислювального приладу, який виробляє аналоговий сигнал звукоприймача 23, щоб його можна було показати як інформацію водієві у кабіні водія 26 на електронній бортовій інформаційній системі 24 індикації втрат 25. Пристрій виміру втрат 21 конструктивно позиціонований так, що складові частини збираної продукції, які наприкінці верхнього решета 12 очищувального пристрою 11 залишають решето, не відносяться назад та як патове утворення випадають на грунт поля, а ударяються у сенсорну поверхню датчика таким чином, що вони потрапляють у схід 27. Із фіг. 2 у перспективному зображенні видно пристрій виміру втрат 21 згідно з винаходом. Пристрій виміру втрат 21 в принципі складається із опори датчика 29, яка має три функціональні зони. Три функціональні зони опори датчика 29 утворені із трьох окремих частин: фіксувального елемента 30, що містить отвір 31 для приймання датчика 22; східчастого напрямного елемента 32, до якого приєднується подовжувальна мата 34, і кріпильного елемента 33 для рознімного закріплення на не показаному тут постачальному дні. Переважно опора датчика 29 виготовлена суцільнокорпусною як штампована та зігнута або вилита під тиском деталь. Функціональна зона з отвором 31 бере на себе несучу функцію щодо сенсорного датчика 22, при цьому зазор між датчиком 22 і отвором 31 опори датчика 29 закладається еластичним матеріалом 35, щоб зменшити акустичні хвилі збиральної машини при детектуванні зерна за допомогою приймача звукових коливань 23. Прилягаюча функціональна зона утворена кріпильним елементом 33, який забезпечує фіксоване з'єднання опори датчика 29 з постачальним донним механізмом транспортування полови та кидалки-вентилятора, або ж кріпильний елемент 33 являє собою деталь опори 29 сенсорного датчика. Третя функціональна зона характеризується напрямним елементом 32, який виконаний східчастим, переважно із трьох каскадних уступів, причому кількість уступів може варіюватися, і звернений у напрямку очищувального пристрою. Східчастий напрямний елемент 32 безшовно приєднаний до датчика 22, з тим щоб запобігти нашаровуванню складових частин збираної продукції. На другому кінці східчастого напрямного елемента 32 прикріплена подовжувальна мата 34, виконана переважно як гумовий фартух, при чому кріплення може виконуватися за допомогою різних кріпильних способів, таких, як пригвинчення, клепання і тому подібних. Подовжу 96276 10 вальна мата 34 з однієї сторони утворює разом із східчастим напрямним елементом 32 напрямну поверхню 36 для вироблюваного очищувальною повітродувкою потоку повітря, а з іншої сторони рухоме з'єднання з донним транспортувальним механізмом очищувального пристрою, профілем решітного короба. За рахунок напрямної поверхні 36 сенсорна поверхня 38 датчика 22 обвівається від неї продуваючим нижнє решето потоком повітря очищувальної повітродувки. Потік повітря відділяє при цьому складові частини збираної продукції від полови, при чому складові частини збираного врожаю (решітний схід та полова) через кріпильний елемент 33 подаються до постачального дна кидалки-вентилятора полови. Як випливає із поєднання фігур 2 та 3, сенсорна поверхня 38 зігнута під кутом таким чином, що пристрій виміру втрат 21 позиціонований не паралельно до решітки 20, а має кут 43. Згідно з винаходом, сенсорна поверхня 38 за рахунок кута 43 звернена не до постачального донного механізму 39, а у напрямку очищувального пристрою 11, в результаті чого складові частини збираної продукції не випадають більше як втрати на грунт поля. Для підвищення міцності опори 29 датчика на постачальному донному механізмі 39 та для зменшення вібрацій на сенсорний датчик 22 на східчастому напрямному елементі 32 розташована упорна рамка 40. Упорна рамка 40 з однієї сторони прикріплена до напрямного елемента 32, наприклад, зварюванням, але можливі й інші способи кріплень, а з іншої сторони обома вільними кінцями 41 рознімно з'єднана з постачальним донним механізмом 39. Цілісна упорна рамка 40 повторює форму східчастого напрямного елемента 32, але може мати й підвищену крайову ділянку (не показана) для спрямування складових частин збираної продукції. Упорна рамка 40 далі виконана такою, що вона фіксує кут, що утворюється між кріпильним елементом 33 та фіксувальним елементом 30. Упорна рамка 40 фіксує пристрій виміру втрат 21 у похилому положенні до решітки 20, завдяки чому відбувається повернення складових частин збираної продукції 3 у решітний схід 27. Із фіг. 3 у схематичному зображенні та вигляді зверху видно розташування обох вимірювальних пристроїв 21 позаду верхнього решета 12 та праворуч і ліворуч поряд з переміщувальним дном 19, безпосередньо під решіткою 20. Виходячи з поділу датчиків 22 на дві частини, вже під час збирання врожаю на рівному полі при відповідному безладному розподілі збираної продукції на верхньому решеті 12 може позначатися настройка очищувального пристрою. Далі за допомогою розташованих праворуч та ліворуч вихідного отвору наприкінці верхнього решета 12 напрямних щитків 42 може досягатися звуження збираної продукції. Завдяки звуженню забезпечується транспортування складових частин збираної продукції також при підбиранні врожаю у бічному нахилі на датчики 22. На фіг. 4 у схематичному зображенні показана деталізована зона "А" із фіг. 1 з похилим розташуванням вимірювального пристрою для транспортування складових частин збираної продукції, що складаються із зернової маси 49, у решітний схід 11 27. Далі видно зерновий донний механізм 45, який через спряжений елемент 46 з'єднаний з нижнім решетом 13. Спряжений елемент 46 створює, крім того, з'єднання з переміщувальним донним механізмом 28. У свою чергу, переміщувальний донний механізм 28 на своєму задньому кінці, також як і пристрій виміру втрат зерна, з'єднаний кріпильними елементами 44 з постачальним донним механізмом 39. Інше з'єднання між пристроєм виміру втрат, який складається із сенсорного датчика 22, напрямного елемента 32 та подовжувальної мати 34, і постачальним донним механізмом 39 здійснюється кріпильним елементом 33. Альтернативно пристрій виміру втрат зерна закріплений на постачальному донному механізмі 39 не кріпильним елементом 33 та упорною рамкою 40, а фіксувальним елементом (не показаний) з'єднаний з верхнім решетом 12 або нижнім решетом 13. В результаті коливального руху нижнього решета 13, яке, наприклад, може коливатися зустрічно до верхнього решета 12, одночасно приводяться в рух також зерновий донний механізм 45, переміщувальний донний механізм 28, постачальний донний механізм 39 і пристрій виміру втрат зерна, так що всі елементи чинять переміщувальну дію на потік перероблюваного матеріалу. Потік перероблюваного матеріалу, що складається із суміші зерна та полови 47, знаходиться як на верхньому решеті 12, так і на нижньому решеті 13. В результаті коливального руху решіт 12, 13 важчі зерна 49 просипаються крізь решета 12, 13 на зерновий донний механізм. Обумовлені коливальним рухом решіт 12, 13 у поєднанні з потоком повітря 37, більш легка полова 48 та деякі зерна 49 через задній кінець решіт 12, 13 транспортуються у напрямку постачального дна 39. При цьому, у свою чергу, зерна 49, які ще знаходяться у потоці перероблюваного матеріалу, просипаються на пристрій виміру втрат і доставляються, як вже було описано вище, по переміщувальному донному механізму 28 до решітного сходу 27. Перелік посилальних базових позначень 1 Збиральна машина 2 Зернозбиральний комбайн 3 Збирана сільськогосподарська 4 Жниварка механізм 96276 12 5 Транспортер 6 Молотильний барабан 7 Гратчастий соломотряс 8 Молотильний короб 9 Зворотний донний механізм 10 Зворотний пристрій 11 Очищувальний пристрій 12 Верхнє решето 13 Нижнє решето 14 Очищувальна повітродувка 15 Елеваторний транспортер 16 Зерновий бункер 17 Кидалка-вентилятор полови 18 Відцентровий розкидач 19 Транспортувальний донний механізм 20 Решітка 21 Пристрій виміру втрат зерна 22 Сенсорний датчик 23 Звукоприймач 24 Бортова інформаційна система 25 Індикація втрати зерна 26 Кабіна водія 27 Решітний схід продукція 28 Переміщувальний донний 29 Опора датчика 30 Фіксувальний елемент 31 Отвір 32 Напрямний елемент 33 Кріпильний елемент 34 Подовжувальна мата 35 Еластичний матеріал 36 Напрямна площина 37 Потік повітря 38 Сенсорна поверхня датчика 39 Постачальний донний механізм 40 Упорна рамка 41 Вільні кінці 42 Напрямний щиток 43 Кут 44 Кріпильний елемент 45 Зерновий донний механізм 46 Спряжений елемент 47 Суміш зерна та полови 48 Полова 49 Зернова маса 13 96276 14 15 Комп’ютерна верстка Л. Купенко 96276 Підписне 16 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSelf-propelled agricultural harvesting machine with loss-measuring device
Автори англійськоюBAUMGARTEN JOACHIM, Brune Markus, Zurhake Christian
Назва патенту російськоюСамоходная сельскохозяйственная уборочная машина с устройством измерения потерь зерна
Автори російськоюБаумгартен Иоахим, Бруне Маркус, Цурхаке Кристиан
МПК / Мітки
МПК: A01D 41/127, A01D 75/18, A01F 12/44, A01F 12/58, A01D 41/12
Мітки: зерна, втрат, машина, збиральна, пристроєм, виміру, сільськогосподарська, самохідна
Код посилання
<a href="https://ua.patents.su/8-96276-samokhidna-silskogospodarska-zbiralna-mashina-z-pristroehm-vimiru-vtrat-zerna.html" target="_blank" rel="follow" title="База патентів України">Самохідна сільськогосподарська збиральна машина з пристроєм виміру втрат зерна</a>
Самохідна сільськогосподарська збиральна машина з керованим перенавантажувальним пристроєм
Номер патенту: 95459
Опубліковано: 10.08.2011
Автори: Дікханс Норберт, Нінабер Герхард, Бруннерт Андреас, Меєр цу Хелліген Ларс
МПК: A01D 43/00, A01D 41/127, A01D 13/00, G05D 1/02, A01D 87/00, A01D 90/00
Мітки: самохідна, машина, збиральна, сільськогосподарська, керованим, перенавантажувальним, пристроєм
Формула / Реферат:
1. Самохідна сільськогосподарська збиральна машина (2), оснащена навігаційною системою (6) для збору даних про відносні місцеположення транспортних засобів-учасників (2, 3), системою передачі даних (8) для обміну даними між транспортними засобами (2, 3), перевантажувальним пристроєм (9) для передачі зібраного врожаю на вантажний транспортний засіб (3), причому перевантажувальний пристрій (9) має пересипне пристосування (10), керуючу систему...
Сільськогосподарська збиральна машина з пристроєм розпізнавання чужорідних предметів
Номер патенту: 95925
Опубліковано: 26.09.2011
Автори: Клаузінг Андреас, Поллклас Манфред
МПК: A01D 75/18, A01F 29/16
Мітки: предметів, пристроєм, розпізнавання, збиральна, сільськогосподарська, чужорідних, машина
Формула / Реферат:
1. Сільськогосподарська збиральна машина для збирання і/або наступної переробки врожаю з перевантажувальним пристроєм для перевантаження збираної продукції і з пристроєм розпізнавання чужорідних предметів для виявлення сторонніх тіл у подавальному механізмі, що містить контрольовану зону потоку збираної продукції, яка відрізняється тим, що при виявленні стороннього тіла у потоці збираної продукції за допомогою пристрою розпізнавання...
Сільськогосподарська збиральна машина з перевантажувальним пристроєм
Номер патенту: 92600
Опубліковано: 25.11.2010
Автори: Ердманн Хуберт, Хафферт Андреас, Фреріхс Людгер
МПК: A01B 73/00, A01D 43/00
Мітки: сільськогосподарська, перевантажувальним, машина, пристроєм, збиральна
Формула / Реферат:
1. Сільськогосподарська збиральна машина (2), зокрема самохідний польовий подрібнювач (1), з розташованим на ній поворотним навколо вертикальної осі обертання (28) та горизонтальної осі (38) перевантажувальним пристроєм (29) для перевантаження збираної сільськогосподарської продукції на транспортний засіб, який здатний повертатися в робоче положення експлуатації і в транспортувальне положення експлуатації, і з різними робочими агрегатами...
Сільськогосподарська збиральна машина

Номер патенту: 75588
Опубліковано: 15.05.2006
Автори: Шверсманн Бертольд, Гоголін Грегор
МПК: A01F 7/00, A01D 41/00, A01F 12/44
Мітки: збиральна, сільськогосподарська, машина
Формула / Реферат:
1. Сільськогосподарська збиральна машина із засобами для вивільнення суплідь із збираної сільськогосподарської маси та для виділення їх з цієї маси, причому щонайменше вивільнення суплідь із збираної маси і часткове попереднє виділення їх з цієї маси відбувається в утвореній молотильними органами зоні обмолоту, а до виходу цієї зони приєднана щонайменше одна зона сепарації для поділу збираної маси та відокремлення суплідь, що утворена...
Сільськогосподарська збиральна машина (варіанти)

Номер патенту: 71578
Опубліковано: 15.12.2004
Автори: Тіманн Холгер, Улендінг Хуберт
МПК: A01D 75/00
Мітки: варіанти, сільськогосподарська, збиральна, машина
Формула / Реферат:
1. Сільськогосподарська збиральна машина з корпусом і привідною головною віссю ходової частини, на кінцях якої поворотно встановлені за допомогою проміжного підключення зубчастих передач або безпосередньо ходові колеса, а також з переставними пристроями, що здійснюють горизонтальне вирівнювання корпусу машини або ходових коліс на нерівній місцевості, з фронтальним пристроєм, сполученим з корпусом машини через регульований поворотний пристрій...
Попередній патент: Імунотерапевтичне індукування зворотного розвитку атеросклеротичних бляшок у пацієнтів
Наступний патент: Похідні бензімідазолу
Випадковий патент: Спосіб діагностики місцевих гнійних ускладнень після оперативних втручань