Високоточний пристрій фільтрації параметрів траєкторії балістичної цілі та визначення елементів орбіти космічного об’єкта
Номер патенту: 116811
Опубліковано: 12.06.2017
Автори: Андрєєв Фелікс Михайлович, Статкус Андрій Віталійович
Формула / Реферат
Високоточний пристрій фільтрації параметрів траєкторії балістичної цілі та визначення елементів орбіти космічного об'єкта, що містить паралельно з'єднані блоки вимірювання дальності, азимуту, кута місця і послідовно з'єднані з ними вузол розширеного векторного фільтра Калмана у складі послідовно з'єднаних блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення, блока формування уточненого вектора навчальних наближень, блока обчислення параметрів траєкторій БКО, причому вихід блока визначення коефіцієнта підсилення з'єднаний з другим, а через блок екстраполяції із третім входами блока фільтрації; підключеного до виходу блока фільтрації вузла уточнення траєкторних оцінок дальності у складі послідовно з'єднаних блока уточнення прискорення, блока остаточного уточнення прискорення, блока уточнення радіальної швидкості, блока усунення неоднозначності, блока формування уточнених оцінок, причому вихід блока остаточного уточнення прискорення з'єднаний відповідно з другими входами блоків усунення неоднозначності та формування уточнених оцінок, треті входи цих блоків - з виходом блока фільтрації, а вихід блока формування уточнених оцінок з'єднаний з другим входом блока формування уточненого вектора навчальних наближень і другим входом вузла уточнення кутових швидкостей; підключеного до входів блоків вимірювання дальності, азимуту, кута місця вузла оцінки радіальної швидкості за даними режиму когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора, блока оцінки радіальної швидкості, блока остаточної оцінки радіальної швидкості, вихід якого підключений до другого входу блока уточнення прискорення та четвертого входу блока усунення неоднозначності, а другий вхід блока корелятора з'єднаний з другим виходом блока уточнення радіальної швидкості; підключеного до виходу блока усунення неоднозначності вузла уточнення кутових швидкостей в складі послідовно з'єднаних блока визначення уточненого значення радіального прискорення та блока уточнення азимутальної та кутомісної швидкостей, третій вхід якого з'єднаний з виходом блока визначення коефіцієнта підсилення, а вихід - з третім входом блока формування уточненого вектора навчальних наближень, який відрізняється тим, що додатково введений вузол класифікації, який складається з підключених паралельно до виходів блока обчислення параметрів траєкторій БКО блока оцінки модуля радіус-вектора цілі та блока оцінки інтеграла енергії, другий вхід якого підключений до виходу блока формування уточнених оцінок, причому блок оцінки модуля радіус-вектора цілі через блок оцінки інтеграла енергії підключений до входу блока прийняття рішень, якій формує ознаку класу цілі, що надходить до другого входу блока обчислення параметрів траєкторій БКО.
Текст
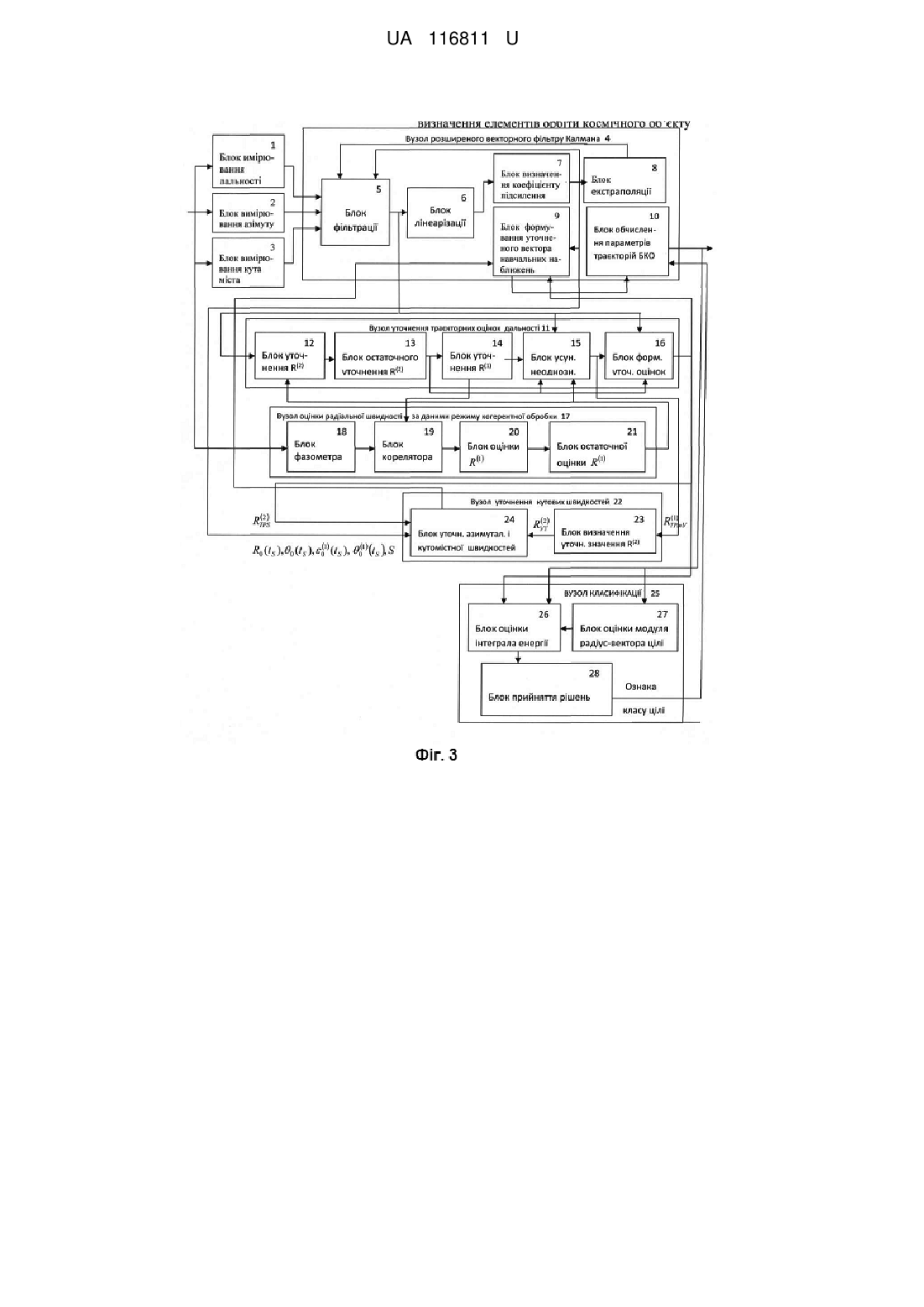
Реферат: UA 116811 U UA 116811 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі радіолокації і може бути використана для побудови траєкторії балістичної цілі та визначення елементів орбіти космічного об'єкта (КО), уточнення їх параметрів за даними режиму когерентної обробки. Відомий пристрій фільтрації параметрів траєкторії цілі [1], який містить блок вимірювання дальності та вузол розширеного фільтра Калмана у складі послідовно з'єднаних блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення і блока екстраполяції, а також вузол уточнення траєкторних оцінок у складі послідовно з'єднаних блока усунення (2) неоднозначності, блока уточнення прискорення ΔR (другої похідної дальності), блока (1) уточнення швидкості ΔR (першої похідної дальності) і блока формування уточнених оцінок та вузол оцінки радіальної швидкості за даними режиму когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора і блока оцінки радіальної швидкості. Пристрій реалізує ефективний нелінійний алгоритм обробки радіолокаційної інформації в умовах невідповідності вибраної моделі руху цілі її реальній траєкторії за рахунок використання точних даних режиму когерентної обробки пачечного луна-сигналу із N імпульсів про радіальну швидкість цілі. Недоліком цього пристрою є недостатньо висока точність побудови параметрів траєкторії цілі по дальності R із-за помилок дискретності вимірювань радіальної швидкості та можливість (ймовірність) наявності грубих помилок за рахунок неврахування вищих похідних дальності при проведені процедури усунення неоднозначності вимірювань радіальної швидкості за даними режиму когерентної обробки. Більш високі точності забезпечує інший пристрій фільтрації параметрів траєкторії цілі [2]. Він містить послідовно з'єднані блок вимірювання дальності і вузол розширеного фільтра Калмана у складі послідовно з'єднаних блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення і блока екстраполяції, причому виходи блоків визначення коефіцієнта підсилення та екстраполяції з'єднані відповідно з другим і третім входами блока фільтрації; підключеного до входу блока вимірювання дальності вузла оцінки швидкості за даними режиму когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора і блока оцінки радіальної швидкості; підключеного до виходу блока фільтрації вузла уточнення траєкторних оцінок у складі блоків усунення неоднозначності, уточнення прискорення, уточнення швидкості і формування уточнених оцінок. Крім того, в вузол уточнення траєкторних оцінок додатково введений блок остаточного уточнення прискорення, а структура вузла складається з послідовно з'єднаних блоків уточнення прискорення, остаточного уточнення прискорення, уточнення швидкості, усунення неоднозначності та формування уточнених оцінок, причому вихід блока остаточного уточнення прискорення додатково з'єднаний з четвертим входом блока усунення неоднозначності та другим входом блока формування уточнених оцінок, а вихід блока фільтрації з'єднаний з першим входом блока уточнення прискорення та третіми входами блоків усунення неоднозначності та формування уточнених оцінок; в вузол оцінки швидкості за даними режиму когерентної обробки додатково введений блок остаточної оцінки радіальної швидкості, послідовно з'єднаний з блоком оцінки радіальної швидкості, причому його вихід з'єднаний з другими входами блоків уточнення прискорення та усунення неоднозначності, при цьому входом пристрою є входи блоків вимірювання дальності та фазометра, а виходом - вихід блока формування уточнених оцінок. Недолік пристрою є недостатньо висока точність побудови параметрів траєкторії балістичної цілі та елементів орбіт КО. Незбурені траєкторії руху балістичної цілі (також КО) в полі тяготіння Землі описуються векторним диференціальним рівнянням другого порядку [3, С. 201]. В сферичної системі координат з центром в точки розміщення РЛС маємо систему трьох диференціальних рівнянь руху балістичної цілі або КО другого порядку відносно R0 t 0 дальності, 0 t 0 - азимута, 0 t 0 - кута місця. Воно задає сімейство кривих другого порядку, за якими можливий рух балістичної цілі (також КО). Конкретна крива задається початковими умовами, що є постійними інтегрування системи рівнянь. Постійних інтегрування системи рівнянь, які є параметрами траєкторії балістичної цілі, шість. Як такі параметри вибирають значення координат R0 t 0 - дальності, 0 t 0 - азимута, 0 t 0 - кута місця та три складових 1 1 1 швидкості змінення цих координат R0 t 0 , 0 t 0 , 0 t 0 в момент виміряння t 0 . Вони визначаються розширеним векторним фільтром Калмана і використовуються як навчальне наближення при інтегруванні системи рівнянь. В оточенні цього нульового наближення здійснюється лінеаризація нелінійних функцій. Потім система нормальних рівнянь, отриманих з урахуванням наявності помилок вимірювань, використовується для відшукання оцінок шуканих параметрів траєкторії (орбіт КО) за методом найменших квадратів (МНК) [4, С. 141-149]. 1 UA 116811 U 5 10 15 20 25 30 35 40 45 50 55 60 Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип, є пристрій фільтрації параметрів траєкторії балістичної цілі та визначення елементів орбіт космічного об'єкта [5]. Він містить паралельно з'єднані блоки вимірювання дальності, азимуту, кута місця і послідовно з'єднані з ними вузол розширеного векторного фільтра Калмана у складі послідовно з'єднаних блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення, блока формування уточненого вектора навчальних наближень, блока обчислення параметрів траєкторій БКО, причому вихід блока визначення коефіцієнта підсилення з'єднаний з другим, а через блок екстраполяції і третім входами блока фільтрації; підключеного до виходу блока фільтрації вузла уточнення траєкторних оцінок дальності у складі послідовно з'єднаних блока уточнення прискорення, блока остаточного уточнення прискорення, блока уточнення радіальної швидкості, блока усунення неоднозначності, блока формування уточнених оцінок, причому вихід блока остаточного уточнення прискорення з'єднаний відповідно з другими входами блоків усунення неоднозначності та формування уточнених оцінок, треті входи цих блоків - з виходом блока фільтрації, а вихід блока формування уточнених оцінок з'єднаний з другим входом блока формування уточненого вектора навчальних наближень і другим входом вузла уточнення кутових швидкостей; підключеного до входів блоків вимірювання дальності, азимуту, кута місця вузла оцінки радіальної швидкості за даними режиму когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора, блока оцінки радіальної швидкості, блока остаточної оцінки радіальної швидкості, вихід якого підключений до другого входу блока уточнення прискорення та четвертого входу блока усунення неоднозначності, а другий вхід блока корелятора з'єднаний з другим виходом блока уточнення радіальної швидкості; підключеного до виходу блока усунення неоднозначності вузла уточнення кутових швидкостей в складі послідовно з'єднаних блока визначення уточненого значення радіального прискорення та блока уточнення азимутальної та кутомісної швидкостей, третій вхід якого з'єднаний з виходом блока визначення коефіцієнта підсилення, а вихід - з третім входом блока формування уточненого вектора навчальних наближень. Клас цілей в радіолокації - безліч цілей, що характеризуються певними алфавітними ознаками [6]. При радіолокаційному розпізнаванні для отримання якісної траєкторної і координатної інформації необхідно для кожного об'єкта, що лоціюється, вирішувати задачу розпізнавання його класу. При радіолокаційному розпізнаванні виявлені об'єкти класифікуються на космічні, балістичні, гіперзвукові аеродинамічні (крилаті ракети, літаки) і аеробалістичні (головні частини ракет, що планують), аеродинамічні, наземні, надводні. Кожен із зазначених класів розбивається на підкласи (види). Розпізнавання класу об'єкта необхідно для подальшого включення в роботу тієї гілки алгоритму супроводження, яка для цього виду призначена. В іншому випадку не забезпечується необхідна точність визначення параметрів траєкторій і елементів орбіт об'єктів. Недоліком пристрою-прототипу є можливість неотримання високоточної інформації про об'єкти в випадку, коли в зоні дії РЛС має місце складна цільова обстановка, обумовлена наявністю об'єктів різних класів. В основу корисної моделі поставлена задача створити пристрій фільтрації параметрів траєкторії балістичної цілі та визначення елементів орбіт КО, в якому введення нових вузлів та блоків забезпечить усунення вказаного недоліку. Поставлена задача вирішується за рахунок того, що до пристрою-прототипу додатково введений вузол класифікації, який складається з підключених паралельно до виходів блока обчислення параметрів траєкторій БКО блока оцінки модуля радіус-вектора цілі та блока оцінки інтеграла енергії, другий вхід якого підключений до виходу блока формування уточнених оцінок, причому блок оцінки модуля радіус-вектора цілі через блок оцінки інтеграла енергії підключений до входу блока прийняття рішень, який формує ознаку класу цілі. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає в забезпеченні високої точності оцінок параметрів траєкторії балістичної цілі (елементів орбіт КО), коли в зоні дії РЛС спостерігаються об'єкти різних класів. Суть корисної моделі пояснюють креслення (фіг. 1, фіг. 2, фіг. 3). Запропонований високоточний пристрій фільтрації параметрів траєкторії балістичної цілі та визначення елементів орбіт КО містить паралельно з'єднані блоки вимірювання дальності 1, азимуту 2, кута місця 3 і послідовно з'єднані з ними вузол розширеного векторного фільтра Калмана 4, вузол уточнення траєкторних оцінок дальності 11, підключений до входу пристрою вузол оцінки радіальної швидкості за даними режиму когерентної обробки 17, підключений до виходів блока визначення коефіцієнта підсилення 7, блока усунення неоднозначності 15, блока формування уточнених оцінок 16 вузла уточнення кутових швидкостей 22, підключений до виходів блока обчислення параметрів траєкторій БКО 10 та блока формування уточнених оцінок 2 UA 116811 U 5 10 15 20 25 30 35 40 45 16 додатковий вузол класифікації 25. Вузол розширеного векторного фільтра Калмана 4 складається з послідовно з'єднаних блока фільтрації 5, блока лінеаризації 6, блока визначення коефіцієнта підсилення 7, при цьому вихід блока визначення коефіцієнта підсилення 7 підключений до другого входу блока фільтрації 5, підключених паралельно до виходу блока визначення коефіцієнта підсилення 7 блока екстраполяції 8, вихід якого підключений до третього входу блока фільтрації 5, та підключеного через блок формування уточненого вектора навчальних наближень 9 блока обчислення параметрів траєкторій балістичних і космічних об'єктів (БКО) 10, вихід якого є виходом пристрою. Вузол уточнення траєкторних оцінок дальності 11 складається з послідовно з'єднаних блока уточнення прискорення 12, блока остаточного уточнення прискорення 13, блока уточнення радіальної швидкості 14, блока усунення неоднозначності 15 та блока формування уточнених оцінок 16, при цьому вихід блока остаточного уточнення прискорення 13 з'єднаний відповідно з четвертим входом блока усунення неоднозначності 15 та другим входом блока формування уточнених оцінок 16, при цьому вихід блока формування уточнених оцінок 16 підключений до другого входу блока формування уточненого вектора навчального наближення 9, розташованого в вузлі розширеного фільтра Калмана 4, та другого входу блока уточнення азимутальної та кутомісної швидкостей 24, розташованого в вузлі уточнення кутових швидкостей 22. Вузол оцінки радіальної швидкості за даними режиму кореляційної обробки 17 складається з послідовно з'єднаних блока фазометра 18, блок корелятора 19, блок оцінки радіальної швидкості 20, блок остаточної оцінки радіальної швидкості 21, при цьому другий вхід блока корелятора 19 з'єднаний з виходом блока уточнення радіальної швидкості 14; вхід вузла 17 з'єднаний з входом пристрою, а вихід вузла 17 - з другими входами блоків уточнення прискорення 12 та усунення неоднозначності 15, розташованих в вузлі уточнення траєкторних оцінок дальності 11. Вузол уточнення кутових швидкостей 22 складається з послідовно з'єднаних блока визначення уточненого значення радіальної швидкості 23 і блока уточнення азимутальної та кутомісної швидкостей 24, при цьому вхід блока визначення уточненого значення радіальної швидкості 23 з'єднаний з виходом блока усунення неоднозначності 15, розташованого в вузлі уточнення траєкторних оцінок дальності 11, перший вхід блока уточнення азимутальної та кутомісної швидкостей 24 з'єднаний з виходом блока визначення коефіцієнта 7, другій вхід - з виходом блока формування уточнених оцінок 16, а вихід з другим входом блока формування уточненого вектора навчального наближення 9. Додатковий вузол класифікації 25 складається з підключених паралельно до виходу блока обчислення параметрів траєкторій БКО 10 блока оцінки модуля-вектора цілі 27 та блока оцінки інтеграла енергії 26, другий вхід якого підключений до виходу блока формування уточнених оцінок 16, причому блок оцінки модуля радіус-вектора цілі 27 через блок оцінки інтеграла енергії 26 підключений до входу блока прийняття рішень 28, який формує ознаку класу цілі, яка надходить до блока обчислення параметрів траєкторій БКО 10. Входом пристрою є входи блоків вимірювання дальності 1, азимуту 2, кута місця 3 і блока фазометра 18, а виходом - вихід блока обчислення параметрів траєкторії БКО 10. Робота запропонованого пристрою полягає в наступному. На вхід блока вимірювання дальності, азимуту, кута місця 1 надходять луна-сигнали від цілей, які використовуються для отримання одиночних вимірів дальності R i азимуту i1 , кута 1 місця i1 в моменти часу t i , де i1=1,2,…S. 1 В вузлі розширеного векторного фільтра Калмана 4 здійснюється фільтрація вимірів R i , i1 , 1 i1 , з отриманням рекурентних оцінок параметрів траєкторій TP , 1 , 2 , R, , у TP TP відповідності із співвідношенням для розширеного векторного фільтра Калмана [7, С. 355-362], тобто побудова траєкторії БКО з використанням кінематичної моделі на момент часу t 0 : 50 55 TP t TP 1 t t 0 0,52 t t 0 2 , де R, , . (1) TP TP З виходу блока визначення коефіцієнта підсилення 7 інформація про вектор положення 1 1 1 ( R0 t 0 , 0 t 0 , 0 t 0 ) та вектор швидкості ( R0 t 0 , 0 t 0 , 0 t 0 ), що отримана за результатами згладжування на момент t 0 , надходить на блок формування уточненого вектора навчальних наближень 9. В блоці 9 формується шестивимірний вектор навчального 1 1 1 наближення RHH (R0 t 0 , 0 t 0 , 0 t 0 ,R0 t 0 , 0 t 0 , 0 t 0 ) . На другий вхід блока 9 надходять 3 UA 116811 U уточнені за даними режиму когерентної обробки високоточні вимірювання азимутальної 1 t 0 УТ 5 та кутомісної 1 t 0 швидкостей. Вони використовуються для формування шестивимірного УТ УТ уточненого вектора навчального наближення RHH (R0 t 0 , 0 t 0 , 0 t 0 , R 1 t 0 , 1 t 0 , 1 t 0 ) . 0 УТ УТ УТ Вектор RHH надходить на блок обчислення параметрів траєкторій БКО 10. Він використовується як початкові умови для вирішення системи диференціальних рівнянь руху БКО [3, С. 201] R R sin , 1 R2 fR R0 t 0 , 0 t 0 , 0 t 0 ,R0 t 0 , 1 t 0 , 1 t 0 УТ УТ 3 1 2 R cos f R0 t 0 , 0 t 0 , 0 t 0 , R0 t 0 , 1 t 0 , 1 t 0 0 , (2) УТ УТ 1 2R f R0 t 0 , 0 t 0 , 0 t 0 ,R0 t 0 , 1 t 0 , 1 t 0 УТ УТ 10 R cos , 3 де μ=398600 км /с - гравітаційна постійна Землі; ρ - геоцентричній радіус-вектор точки стояння РЛС. Рішення системи (2) в блоці 10 здійснюється наближено з використанням лінеаризації рівнянь (3) і МНК [4, С. 141-149]. Вихідної інформацією блока 10 є або вектор параметрів траєкторії балістичної цілі b1 RБЦ, БЦ, БЦ,R1 , 1 , 1 , або вектор елементів БЦ БЦ БЦ орбіти космічного об'єкта b2 a, e, , , i, u , де а – велика піввісь, ε - ексцентриситет, ω аргумент перицентра, Ω - довгота висхідного вузла, і - нахил, u - аргумент широти. Когерентна обробка пачки луна-сигналів здійснюється в вузлі оцінки радіальної швидкості 17. Для цього в блоці фазометра 18 в межах m-ої когерентної пачки із N імпульсів формуються значення фази сигналів відносно фази зондуючого сигналу (чи сигналу когерентного гетеродину) i . Отримана функція фаза в часі визначається параметрами руху цілі (дальності 3 2 15 20 R0 на момент часу t 0 , першої та другої похідних дальності R1 , R 2 ): 2Ri 4 R 0 R 1 t i t m 0,5R 2 t i t m 2 , (3) c де f - робоча частота PЛC; с - швидкість світла; λ - довжина хвилі; і=1,2,…N. i 2f Високоточні оцінка радіальної швидкості цілі за даними когерентної обробки R 1 на Кm поточний момент часу t m здійснюється методом кореляційної обробки отриманої функції фази 25 i . Для цього в блоці корелятора 19 обчислюється значення модуля кореляційного інтегралу j як результат порівняння функцій фази i з набором із J опорних (еталонних) функцій фази з відомими параметрами R 1 . OЇЇ j 2 2 N 1 N sin i OЇ ij cos i OЇ ij ; (4) N i 1 i1 4 1 R t i t m 0,5R 2 óm t i t m 2 ; j 12,J , (5) , TP OЇЇ де R 2 - поточні оцінки радіального прискорення після уточнення в блоці 14 на m-ому OЇ ij 30 TP óm 1 кроці в момент часу tm. За первинні високоточні оцінки радіальної швидкості RKm за даними режиму когерентної обробки приймаються параметри тієї r-ої опорної функції, при порівнянні з якими отримано максимальне значення кореляційного інтегралу j max : 35 1 1 RKm ROЇ r . (6) Пошук максимуму кореляційного інтегралу j здійснюється з дискретністю, яка не перевищує розмір області високої кореляції функції неузгодженості когерентної пачки імпульсів по радіальній швидкості R1 на рівні - 3 Дб. Він дорівнює [8] R1 / 2TЇ / 2NT~ , (7) NE 4 UA 116811 U де TЇ , T~ - тривалість пачки імпульсів і період слідування імпульсів в пачки відповідно. NE Діапазон однозначного вимірювання радіальної швидкості R 1 в режимі когерентної обробки 0 пачечного луна-сигналу складає [8] 1 ~ R0 / 2TNE . (8) 5 Мінімальне число опорних функцій R 1 / R 1 N має місце, коли крок опорних функцій 0 R1 . Первинні за даними режиму когерентної обробки дорівнює розрізнювальній спроможності пачки по радіальній швидкості високоточні оцінки радіальної швидкості R1 R1 Km OЇ r формуються в блоці 20. Вони відповідають оцінкам максимального правдоподібності (ОМП) 10 15 20 1 1 (RKm )ˆ ÌÏ ROЇ r при величині дискрети R1 . I Так як помилки дискретності розподілені за рівномірним законом, то середньоквадратичні відхилення (СКВ) помилки дискретності оцінки (R1 )ˆ R1 при величині кроку R1 Km I ÌÏ OЇ r дорівнюють 1 D R 1 / 2 3 . (9) Їх зменшення здійснюється в блоці остаточної оцінки радіальної швидкості 21, в якому ОМП уточнюються методом триточкової інтерполяції max1 max1 ˆ 1 ˆ 1 , (10) (RKm )ˆ Ï 2 (RKm )ˆ R1 I I ÌÏ max1 2max max1 де max - значення максимуму модуля кореляційного інтегралу та двох сусідніх max1 зліва та max1 - справа відповідно. Отримані в ході траєкторної обробки оцінки похідних дальності уточнюються L вимірами ˆ 1 )ˆ 2 , за даними когерентної обробки, які надходять для цього з виходу блока 21 на другі (R Km I Ï входи блоків 12 і 15. Спочатку уточнюється радіальне прискорення R 2 (ступінь кривизни TP функції R TP чи кут нахилу функції R 1 в блоці 12. Для цього здійснюється кореляційна обробка TP різницевої функції 1 1 ˆ 1 Rm (RKm )ˆÏ 2 Km R0 R1 R2 tm t0 0,5R3 tm t 0 2 , (11) TP TP TP I 25 де Km - ціле число інтервалів однозначності R 1 радіальної швидкості. 0 2 , яке забезпечує максимум коефіцієнта кореляції Q . Проводиться пошук значення R d ˆ I Ïmd ˆ R1 1 L Km OЇ 2 R2 , (12) exp j2 ˆ Їmd 1 I L m 1 R0 ˆ 1 2 на інтервалі спостереження за ціллю T t t , t , t де L - кількість вимірювань R L L 1 L 1 Km ˆ Ї I ˆ 1 2 відповідно. Крок пошуку максимуму дорівнює - моменти L-ого та першого вимірювань R Qd 30 RL2 R 1 0 2TL Km ˆ Ї I . (13) 1 За первинні оцінки радіального прискорення Rm ˆ ÌÏ - приймаються параметри тієї d-ої I опорної функції, якої відповідає максимальному значенню кореляційного інтегралу max Qd d Qmax R 2 m ˆ ÌÏ I 35 : 2 ROЇmd . (14) 2 2 Число опорних функцій R2 дорівнює M1 Rmax / RL2 , де Rmax - максимальне ˆ Їmd I можливе значення радіального прискорення цілі. В блоці остаточного уточнення прискорення 2 13 ОМП прискорення Rm ˆ R2 уточнюються методом триточкової інтерполяції I ÌÏ OЇ md 5 UA 116811 U ˆ R Qmax1 Qmax1 , (15) Qmax1 2Qmax Qmax1 де Qmax - значення максимуму модуля кореляційного інтегралу та двох сусідніх Qmax1 зліва та Qmax1 - справа відповідно. ˆ На наступному етапі в блоці 14 уточнена оцінка радіального прискорення R 2 ˆ 2 2 m ˆÏ 2 I ˆ2 Rm ˆ ÌÏ I 0,5RL2 ˆ 2 RKm ˆI Ï m IÏ 5 використовується для розрахунку поправки до оцінки радіальної швидкості цілі Відповідна поправка розраховується за співвідношенням: R 1 Ó R 1 0 2 2 . L sin m , (16) arctg m 1 L cos m m 1 де m ˆ R 1 2 ˆ ˆ 2 2 Km IЇ Rm R 1 0 ˆЇ 2 I tm t 0 . На наступному етапі поправки до першої R1 та другої Ó 10 2 m ˆЇ 2 I похідних дальності використовуються для усунення неоднозначності високоточних вимірювань радіальної швидкості, отриманих за даними режиму когерентної обробки. Для цього в блоці усунення неоднозначності 15 визначається кількість інтервалів однозначності Km в вимірюваннях ˆ радіальної швидкості за даними режиму когерентної обробки R1 ˆ 2 . Km I Ї ˆ ˆ R1 R1 (R2 R2 ˆ 2 )t t 0,5R3 t t 2 R1 2 m IЇ m 0 0 TPm TPm m Km ˆЇ 1 , (17) I Ó TPm Km E 1 2 R0 1 ; R 2 - значення оцінок похідних дальності, де E - ціла частина числа , R TPm TPm 15 ˆ R отриманих в ході траєкторної обробки в блоці фільтрації 5 на момент часу t m . З виходу блока усунення неоднозначності 15 на вхід блока формування уточнених оцінок 16 надходить . В блоці 15 визначення кількості R 1 TPmУ однозначності Km здійснюється з урахуванням вищих похідних дальності. В блоці 16 остаточно уточнюються траєкторні оцінки похідних дальності ˆ R1 R1 R1 K R1 ; R2 R2 R2 ˆ 2 . (18) значення 20 TPmÓ радіальної TPm швидкості Ó m 0 TPmÓ TPm інтервалів m IЇ В роботі [4, С. 120] встановлено, що додатково використання високоточних вимірювань радіального прискорення R 2 дозволяє підвищити точність вимірювання кутових швидкостей. УТ Тому пристрій має вузол уточнення кутових швидкостей 22. Високоточне вимірювання 25 R 2 здійснюється в блоці визначення уточненого значення УТ радіального прискорення 23. Для цього на його вхід надходять високоточні вимірювання радіального прискорення радіальної швидкості R 1 з виходу блока усунення неоднозначності 15, які згладжуються в ТРmУ блоці 23 лінійним фільтром Калмана. З виходу блока 23 високоточне вимірюване радіальне 30 прискорення R 2 надходить на третій вхід блока уточнення азимутальної та кутомісної УТ швидкостей 24, на другий вхід з виходу блока формування уточнених оцінок 16 надходить останнє не уточнене значення радіальної швидкості R 2 , яке отримане без використання ТPS даних режиму когерентної обробки, а на перший - значення дальності R0 t S , кута місця 0 t S , 1 1 азимутальної 0 t S , кутомісної 0 t S швидкостей, отриманих на момент часу t S , що відповідає останньому номеру вимірювання координат цілі S. 6 UA 116811 U Формування уточненого вектора R (і кореляційної матриці його похибок) здійснюється шляхом заміни оцінок кутових швидкостей 1 t S , 1 t S в складі вектора RHH нa оцінки 1 , ÓÒ 0 , (19) R cos R , (20) R 4R p p , (21) 1 сos p p p p 4R 4R p p , (22) 1 p p 4R p p cos де , - дисперсії уточнених оцінок , . В виразах (19)…(22) введені 4m 1 1 1 1 0 1 4m01R0 cos2 02 0 R2 R2 УT УТ ТPS 5 1 УT 2 1 0 0 1 0 1 УТ 2 2 1 0 4 1 0 2 0 0 1 2 0 1 0 2 1 0 2 0 2 2 1 УТ 2 1 0 2 0 1 2 2 1 ÓÒ 1 4 0 1 УТ 1 УТ p R / R , (24) p , (25) p , (26) де , - постійні, що враховують можливі систематичні помилки і 2 2 1 0 2 2 2 2 2 3 2 УТ 2 1 1 0 1 2 2 2 1 0 1 1 1 1 1 1 1 1 1 при оцінюванні 0 , 0 шляхом згладжування вимірювань відповідних кутів. Вектор параметрів траєкторії або елементів орбіт космічного об'єкта, які уточнені більш точними даними режиму когерентної обробки надходить на блок 9, де використовується як уточнений вектор навчальних наближень. Класифікацію балістичних і космічних об'єктів на пасивному ділянці руху можна проводити за величиною інтеграла енергії, що розраховується з допомогою включених послідовно блоків оцінки модуля радіус-вектора цілі 27 та оцінки інтеграла енергії 26. В блоці 27 оцінка модуля радіус-вектора цілі формується як [4] 25 1 1 2 2 2 1 2 2 1 2 m0 2 R2 / R3 2 0 4R0 0 4R0 0 cos4 02 0 , (23) УТ 0 20 1/ 2 2 ТPS 2 1 ÓÒ позначення: 15 2 УТ 1/ 2 2 1 2 0 C 0 2 2 1 2 0 1 0 C 1 2 10 УT 0 1 , які обчислюють за формулами [4, С. 120] УT 1/ 2 2 . (27) R2 R3 2RR 3Sin Sin Необхідна для обчислення інформація про дальність R, азимуту надходить з виходу блока обчислення параметрів траєкторій БКО 10. Як оцінка використовується кутовий напрямок, який відповідає центру сектора огляду РЛС по куту місця. В блоці 26 формується оцінка інтеграла енергії h без урахування обертання Землі відповідно виразу [4] 2 1/ 2 2 2 2 , (28) h V2 R1 RR 2 R 2R3 3RR 3Sin Sin 3 де V R1 1 1 - абсолютне значення швидкості цілі, R3=6371 км - радіус 3 2 Землі, μ=398605 км /с - гравітаційна постійна. Необхідна для обчислення h інформація про дальність R, азимуту , куту місця надходить з виходу блока обчислення параметрів 2 30 2 2 траєкторій БКО 10, а дані про R1 , R 2 - від блока формування їх уточнених значень 16. Діапазон можливих значень h ділиться на проміжки hi hi1, hi , i 0,5 . Їх граничні значення наведені в таблиці 1. 35 7 UA 116811 U Таблиця 1 Розподіл діапазону можливих значень h на проміжки і 2 2 hi, км /с 5 10 15 20 0 -125 1 -115 2 -90 3 -72 4 -65 5 0 Між проміжками і типами траєкторій цілей hi , існує наступне відповідність класам цілей: 0. Гіперзвукова аеродинамічна ціль; 1. Ціль з гранично низькими значеннями інтеграла енергії; 2. Балістична ракета середньої дальності (БРСД); 3. Міжконтинентальна БР (МБР); 4. Потенційно небезпечна ціль; 5. Штучний супутник Землі (ШСЗ). Результати класифікації надходять до блока обчислення параметрів траєкторій БКО 10. У разі надходження ознак з номерами від 2 до 5 блок 10 видає необхідну інформацію. На вихід пристрою видаються вектор параметрів траєкторії балістичної цілі або вектор елементів космічного об'єкта, які уточнені більш точними даними режиму когерентної обробки, тобто більш точні дані режиму когерентної обробки дозволяють підвищити точність оцінки параметрів траєкторій та елементів орбіт балістичних і космічних об'єктів, а наявність вузла класифікації зробити це при наявності в зоні дії РЛС одночасно цілей різних класів. Як оцінку ефективності в теорії розпізнавання використовують число хибних тривог [6]. Цей показник залежить від похибок вимірювання інтегралу енергії. При класифікації виконується низка спеціальних вимог відносно рівня точності визначення координат і параметрів руху цілей, тому можна вважати, що систематичні помилки оцінювання інтеграла енергії відсутні. Для опису помилок оцінки значення інтеграла енергії h цілі можна використовувати розкладання функціональної залежності (28) в ряд за ступенями малих значень параметрів Zi , що мають сенс помилок вимірювання аргументів Z i залежності (22) 4 ˆ h h h0 ~ aiZi , (29) i0 25 де ai hZ0 / Zi - часні похідні детермінованої залежності (28) по її аргументах в точці істинного значення оцінюваної величини h0 hZ0 . Середній квадрат помилки h з урахуванням її центрованості має вигляд 2 h h2 4 4 4 4 M ai2 Zi 2 2 ai a j Zi Z j ai2 i2 2 ai a j k ji i j , (30) i0 i0 i 0 i0 j1 j1 30 де i2 - дисперсія i-ої компоненти вектора оцінки параметрів цілі Z R,R1,R2, , а k ij коефіцієнт кореляції i-й та j-й компонент вектора Z. В запропонованому пристрої для компонент вектора Z кореляція відсутня k ij ij, j 0,4 . Тому маємо 2 h T 4 ai2i2 . (31) i0 Аналіз виразу (31) показав, що домінуючим фактором при визначенні точності оцінки 35 значення інтеграла енергії цілі є точність оцінки R 2 . Тому далі вважаємо 2 h ~ a 22 R 22 eì4 / ~4 , (32) 2 2 n 2 ˆ ˆ де 2 R 2 - результуюча середньоквадратична помилка (СКП) оцінки R 2 . З огляду на 40 максимальні близькості характеру руху БР і низькоорбітальних ШСЗ визначальне значення при оперативної класифікації мають оцінки, одержувані з цього класу ШСЗ. Згідно з (32), точність ˆ оцінки h залежить від максимальної дальності цього класу цілей. Аналіз геометрії відповідного завдання для цілі, що рухається по круговій орбіті з висотою Н і спостерігається під кутом місця , призводить до вираження для Rmax вигляду 8 UA 116811 U Rmax H, rSin 0 / Cos r 1 Cos 0 1/ 2 / Cos , (33) де r RÈÑÇ / R3 R3 H / R3 ; (34) 0 - центральний кут між напрямком на РЛС і напрямком на ціль 5 1/ 2 Cos 0 Cos 2 r 2 Cos 2 Sin / r . (35) Беручи до уваги зв'язок інтеграла енергії ШСЗ, що рухається по круговій орбіті з радіусом RÈÑÇ із (34) h / RÈÑÇ , (36) при мінімальному для РЛС виявлення БКО кута місця γ=5° отримуємо залежність Rmax (h) у вигляді лінійної апроксимації Rmax h 5 800 362,5 h hÈÑÇ , [км], (37) min 10 яка забезпечує погрішність не більше 5 % для h hÈÑÇ , hÈÑÇ , де hÈÑÇ 615 км2 / с 2 , min min ÍÎ мінімальне значення h для ШСЗ, відповідне мінімальній висоті орбітального польоту 120 км, hÈÑÇ 57 км2 / с 2 - граничне значення h для низькоорбітальних ШСЗ, що формують хибні ÍÎ 15 тривоги при класифікації. Остаточно вираз для дисперсії оцінки в ході класифікації отримуємо підстановкою Rmax (h) в (32) замість дальності цілі R: 20 2 2 h Rmax h2 км4 / с 4 , (38) 2 Хибні тривоги при класифікації призводять до суттєвих "непродуктивних" витрат енергетичних ресурсів РЛС і знижують її пропускну здатність по БР або інших особливо небезпечних цілях. Розроблена методика оцінки числа хибних тривог NF при класифікації за одне проходження сукупності низькоорбітальних ШСЗ через зону огляду РЛС, що дозволяє враховувати фактичний розподіл ШСЗ в навколоземному просторі по інтегралу енергії RÈÑÇ h : 25 1. Задається СКП вимірювання радіальної швидкості R 2 2 . 2. Задається розподіл ШСЗ в навколоземному космічному просторі по інтегралу енергії RÈÑÇ h . Як приклад на фіг. 1 наведено розподіл за даними каталогу NORAD станом на 04.02.2000 р. 3. Задається зона огляду РЛС і визначається розподіл ШСЗ в цій зоні огляду по інтегралу енергії RÈÑÇ h . 30 4. Розраховуються точності характеристики оцінки інтеграла енергії відповідно до виразів ˆ ˆ (32) … (38) і визначаються розподілу оцінки інтеграла енергії f1К h для кожного k-го підкласу ˆ класу 1 (ШСЗ) і f2 h для класу 2 (БР). 5. Розраховується інтенсивність хибних тривог при класифікації за один прохід сукупності низькоорбітальних ШСЗ через зону огляду РЛС НГО як математичне очікування числа помилкових тривог, обумовлених ШСЗ k-го класу, відповідно до виразу 35 NF NÈÑÇ Fk , (39) k де k ÈÑÇ Nk - число ШСЗ k-го підкласу відповідно до гістограми на фіг. 1; Fk - ймовірність помилкової тривоги при оперативній класифікації для ШСЗ k-го підкласу Fk h12 ˆ ˆ f1k h dh ; (40) h12 - межа класів 1 (ШСЗ) та 2 (БР), зміщена відносно вихідного рівня; 40 0 h12 65 км2 / с 2 для забезпечення ймовірності правильного виявлення БР, що дорівнює DÊÒÖ 9 UA 116811 U DÊÒÖ h12 ˆ ˆ f2 h dh (41) 0 ˆ h12 h12 X ÊÒÖ h , (42) ˆ де X - квантіль розподілу помилки оцінки h при рівні значущості квантіль розподілу ÊÒÖ 5 10 ˆ помилки оцінки при рівні значущості ; ˆ - СКП оцінки h , КТЦ - класифікація ÊÒÖ 1 DÊÒÖ h типу цілі. Відповідно до цієї методики інтенсивність помилкових тривог при оперативній класифікації типу траєкторії цілі було розраховано для таких припущень, що виконуються в умовах функціонування РЛС: 1. Низькоорбітальні складові розподілів ШСЗ в навколоземному просторі і в зоні огляду РЛС практично збігаються: RÈÑÇ h MÈÑÇ h при h hÈÑÇ . ÍÎ ˆ 2. Розподілу оцінки h нормальні: h ~ N h1k , 1k h , k , де h1k - середнє значення k-гo під інтервалу h з класу 1 (ШСЗ), a 1k h задаються виразом (38). Залежності інтенсивності хибних тривог КТЦ від СКП оцінки радіального прискорення R 2 для різних значень D наведені на фіг. 2. ÊÒÖ 15 20 25 30 35 40 45 На підставі аналізу значень помилок вимірювання радіальних швидкості R1 і прискорення R 2 без компенсації і з компенсацією іоносферних помилок, що доставляються аналітичною моделлю, розглянутою в роботі [9], можна зробити наступні висновки: 1. Точність оцінки R 2 навіть за умови високих кінематичних властивостей цілі R 2 15 g , характерних для БКО, при компенсації впливу іоносфери поліпшується в значно меншому ступені, ніж точність оцінки R1 . Тому вимога компенсації іоносферної помилки з точки зору вимірювання R 2 для штатного режиму роботи РЛС (когерентна пачка з 16 імпульсів) не є категоричним. 2. Результуюча СКП оцінки R 2 при відсутності компенсації іоносферних помилок для РЛС метрового діапазону з аналого-цифрової системою когерентної обробки може досягати 2 2 0,75…0,8 м/с , а з цифровою системою - 0,5 м/с . Такі помилки можуть бути отримані під час вступу п'яти вимірювань на етапі захоплення-супроводу мети і одного призначення режиму когерентної обробки пачкою із 16 імпульсів. З використанням залежностей, наведених на фіг. 2, встановлюємо, що в штатному режимі 2 роботи РЛС при = 0,75…0,8 м/с і DÊÒÖ=0,95 інтенсивність хибних тривог при КТЦ за одне проходження сукупності низькоорбітальних ШСЗ через зону огляду РЛС становить NF0=30…35. Досвід експлуатації РЛС виявлення БКО розглядати дане значення показника ефективності як допустимий для практики. Для РЛС метрового діапазону з цифровою системою ця цифра знижується до 5. Послідовність включення в роботу окремих блоків пристрою та їх взаємодія визначається сіткою керуючих і синхронізуючих імпульсів, які "прив'язані" до сітки частот синхронізатора РЛС (вузол синхронізації і керування на схемі пристрою не показаний). Джерела інформації: 1. Орехов С.В., Піскунов С.М., Челпанов В.В., Акулінін Г.В. Патент на корисну модель "Пристрій фільтрації параметрів траєкторії цілі" 52485. Бюл. № 16, 2010 р. 2. Андреев Ф.М., Меленті Є.О., Рибалка Г.В., Статкус А.В., Челпанов А.В. Патент на корисну модель № 93389 "Пристрій фільтрації параметрів траєкторії цілі" //Харківський університет Повітряних Сил імені Івана Кожедуба. Зареєстровано в Державному реєстрі патентів України на корисні моделі 25.09.2014, Бюл. № 18. 3. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации /С.3. Кузьмин. - М.: Сов. Радио. - 1974. -432 с. 4. Саврасов Ю.С. Алгоритмы и программы в радиолокации. - М.: Радио и связь, 1985. - 216 с. 5. Андреев Ф.М., Статкус А.В. Патент на корисну модель № 107172 "Пристрій фільтрації параметрів траєкторії балістичної цілі та визначення елементів орбіти космічного об'єкта" 10 UA 116811 U 5 10 //Харківський національний університет імені В.Н. Каразіна. Зареєстровано в Державному реєстрі патентів України на корисні моделі 25.05.2016, Бюл. № 10. 6. Горелик А.Л. Методы распознавания. Учебное пособие /Л.А. Горелик, В.А. Скрипник. - М.: Высшая школа, 1984. - 208 с. 7. Кузьмин С.З. Цифровая обработка радиолокационной информации /С.З. Кузьмин. - М.: Сов. Радио. - 1967. - 400 с. 8. Андреев Ф.М. Потенциальные возможности корреляционной обработки пачечных когерентных радиолокационных сигналов в координатах первых трех производных дальности цели /Ф.М. Андреев. А.В. Статкус //Сб. науч. трудов 2-го Международного радиоэлектронного форума "Прикладная радиоэлектроника. Состояние и перспективы развития". - Харьков. - Т. 2. 2005. - С. 147-150. 9. Андреев Ф.М. Оценка точности измерения радиальных скорости и ускорения цели по данным системы когерентной обработки РЛС /Ф.М. Андреев. А.В. Статкус //Системы управления, навигации та зв'язку, Київ, 2012, вип. 4 (24). - С. 17-24. 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 40 45 50 Високоточний пристрій фільтрації параметрів траєкторії балістичної цілі та визначення елементів орбіти космічного об'єкта, що містить паралельно з'єднані блоки вимірювання дальності, азимуту, кута місця і послідовно з'єднані з ними вузол розширеного векторного фільтра Калмана у складі послідовно з'єднаних блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення, блока формування уточненого вектора навчальних наближень, блока обчислення параметрів траєкторій БКО, причому вихід блока визначення коефіцієнта підсилення з'єднаний з другим, а через блок екстраполяції із третім входами блока фільтрації; підключеного до виходу блока фільтрації вузла уточнення траєкторних оцінок дальності у складі послідовно з'єднаних блока уточнення прискорення, блока остаточного уточнення прискорення, блока уточнення радіальної швидкості, блока усунення неоднозначності, блока формування уточнених оцінок, причому вихід блока остаточного уточнення прискорення з'єднаний відповідно з другими входами блоків усунення неоднозначності та формування уточнених оцінок, треті входи цих блоків - з виходом блока фільтрації, а вихід блока формування уточнених оцінок з'єднаний з другим входом блока формування уточненого вектора навчальних наближень і другим входом вузла уточнення кутових швидкостей; підключеного до входів блоків вимірювання дальності, азимуту, кута місця вузла оцінки радіальної швидкості за даними режиму когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора, блока оцінки радіальної швидкості, блока остаточної оцінки радіальної швидкості, вихід якого підключений до другого входу блока уточнення прискорення та четвертого входу блока усунення неоднозначності, а другий вхід блока корелятора з'єднаний з другим виходом блока уточнення радіальної швидкості; підключеного до виходу блока усунення неоднозначності вузла уточнення кутових швидкостей в складі послідовно з'єднаних блока визначення уточненого значення радіального прискорення та блока уточнення азимутальної та кутомісної швидкостей, третій вхід якого з'єднаний з виходом блока визначення коефіцієнта підсилення, а вихід - з третім входом блока формування уточненого вектора навчальних наближень, який відрізняється тим, що додатково введений вузол класифікації, який складається з підключених паралельно до виходів блока обчислення параметрів траєкторій БКО блока оцінки модуля радіус-вектора цілі та блока оцінки інтеграла енергії, другий вхід якого підключений до виходу блока формування уточнених оцінок, причому блок оцінки модуля радіус-вектора цілі через блок оцінки інтеграла енергії підключений до входу блока прийняття рішень, якій формує ознаку класу цілі, що надходить до другого входу блока обчислення параметрів траєкторій БКО. 11 UA 116811 U 12 UA 116811 U Комп’ютерна верстка Л. Литвиненко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 13
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 13/52
Мітки: балістичної, пристрій, орбіти, об'єкта, траєкторії, цілі, високоточний, параметрів, космічного, визначення, елементів, фільтрації
Код посилання
<a href="https://ua.patents.su/15-116811-visokotochnijj-pristrijj-filtraci-parametriv-traehktori-balistichno-cili-ta-viznachennya-elementiv-orbiti-kosmichnogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Високоточний пристрій фільтрації параметрів траєкторії балістичної цілі та визначення елементів орбіти космічного об’єкта</a>
Пристрій фільтрації параметрів траєкторії балістичної цілі та визначення елементів орбіти космічного об’єкта
Номер патенту: 107172
Опубліковано: 25.05.2016
Автори: Статкус Андрій Віталійович, Андрєєв Фелікс Михайлович
МПК: G01S 13/52, G01S 7/02
Мітки: космічного, параметрів, об'єкта, визначення, балістичної, цілі, траєкторії, елементів, орбіти, пристрій, фільтрації
Формула / Реферат:
Пристрій фільтрації параметрів траєкторії балістичної цілі та визначення елементів орбіт космічного об'єкта, що містить паралельно з'єднані блоки вимірювання дальності, азимуту, кута місця і послідовно з'єднані з ними вузол розширеного векторного фільтра Калмана у складі послідовно з'єднаних блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення, блока екстраполяції, причому виходи блоків визначення коефіцієнта...
Пристрій фільтрації параметрів траєкторії цілі

Номер патенту: 52405
Опубліковано: 25.08.2010
Автори: Піскунов Станіслав Миколайович, Акулінін Гліб Васильович, Орєхов Сергій Васильович, Челпанов Володимир Валентинович
МПК: G01S 13/52
Мітки: пристрій, цілі, параметрів, траєкторії, фільтрації
Формула / Реферат:
Пристрій фільтрації параметрів траєкторії цілі, що містить послідовно з'єднані блок вимірювання дальності і вузол розширеного фільтра Калмана у складі послідовно з'єднаних блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення і блока екстраполяції, який відрізняється тим, що додатково введені вузол уточнення траєкторних оцінок у складі послідовно з'єднаних блока усунення неоднозначності, блока уточнення прискорення,...
Пристрій фільтрації параметрів траєкторії цілі
Номер патенту: 93389
Опубліковано: 25.09.2014
Автори: Челпанов Артем Володимирович, Статкус Андрій Віталійович, Меленті Євген Олександрович, Рибалка Григорій Валерійович, Андрєєв Фелікс Михайлович
МПК: G01S 13/52
Мітки: траєкторії, параметрів, пристрій, цілі, фільтрації
Формула / Реферат:
Пристрій фільтрації параметрів траєкторії цілі, який містить послідовно з'єднані блок вимірювання дальності, вузол розширеного фільтра Калмана, вузол уточнення траєкторних оцінок та вузол оцінки швидкості за даними режиму когерентної обробки, який відрізняється тим, що додатково введені блок остаточного уточнення прискорення та блок остаточної оцінки радіальної швидкості, вузол розширеного фільтра Калмана у складі послідовно з'єднаного блока...
Пристрій фільтрації параметрів траєкторії цілі
Номер патенту: 12818
Опубліковано: 15.03.2006
Автори: Челпанов Артем Володимирович, Карлов Володимир Дмитрович, Квіткін Костянтин Петрович, Луковський Олег Ярославович, Петрушенко Микола Миколайович, Коваль Олександр Андрійович
МПК: G01S 13/52
Мітки: траєкторії, параметрів, цілі, фільтрації, пристрій
Формула / Реферат:
Пристрій фільтрації параметрів траєкторії цілі, що містить лінійний фільтр Калмана, N паралельно включених узгоджених фільтрів, блок вибору максимуму і блок порівняння з порогом, який відрізняється тим, що додатково введений другий фільтр Калмана, блок аналізу динамічних помилок, блок аналізу оцінок і блок комутатора, причому перший вихід першого фільтра Калмана з'єднаний із входом блока аналізу динамічних помилок, другий вихід - із входом...
Пристрій рекурентної фільтрації параметрів траєкторії цілі
Номер патенту: 50281
Опубліковано: 25.05.2010
Автори: Ворошилов Сергій Вікторович, Смоляков Денис Олександрович, Піскунов Станіслав Миколайович, Челпанов Артем Володимирович
МПК: G01S 13/52
Мітки: параметрів, фільтрації, рекурентної, траєкторії, цілі, пристрій
Формула / Реферат:
Пристрій рекурентної фільтрації параметрів траєкторії цілі, який містить фільтр Калмана у складі послідовно з'єднаних блока фільтрації, блока екстраполяції і визначення кореляційної матриці помилок (КМП) та блока визначення коефіцієнта підсилення, який відрізняється тим, що додатково введено вузол визначення характеристик помилок та корекції КМП у складі послідовно з'єднаних блока визначення характеристик корельованих помилок, блока...
Попередній патент: Малеїльований галотанін з протимікробними властивостями
Випадковий патент: Гирловий генератор імпульсів