Пристрій фільтрації параметрів траєкторії цілі
Номер патенту: 52405
Опубліковано: 25.08.2010
Автори: Акулінін Гліб Васильович, Орєхов Сергій Васильович, Челпанов Володимир Валентинович, Піскунов Станіслав Миколайович



Формула / Реферат
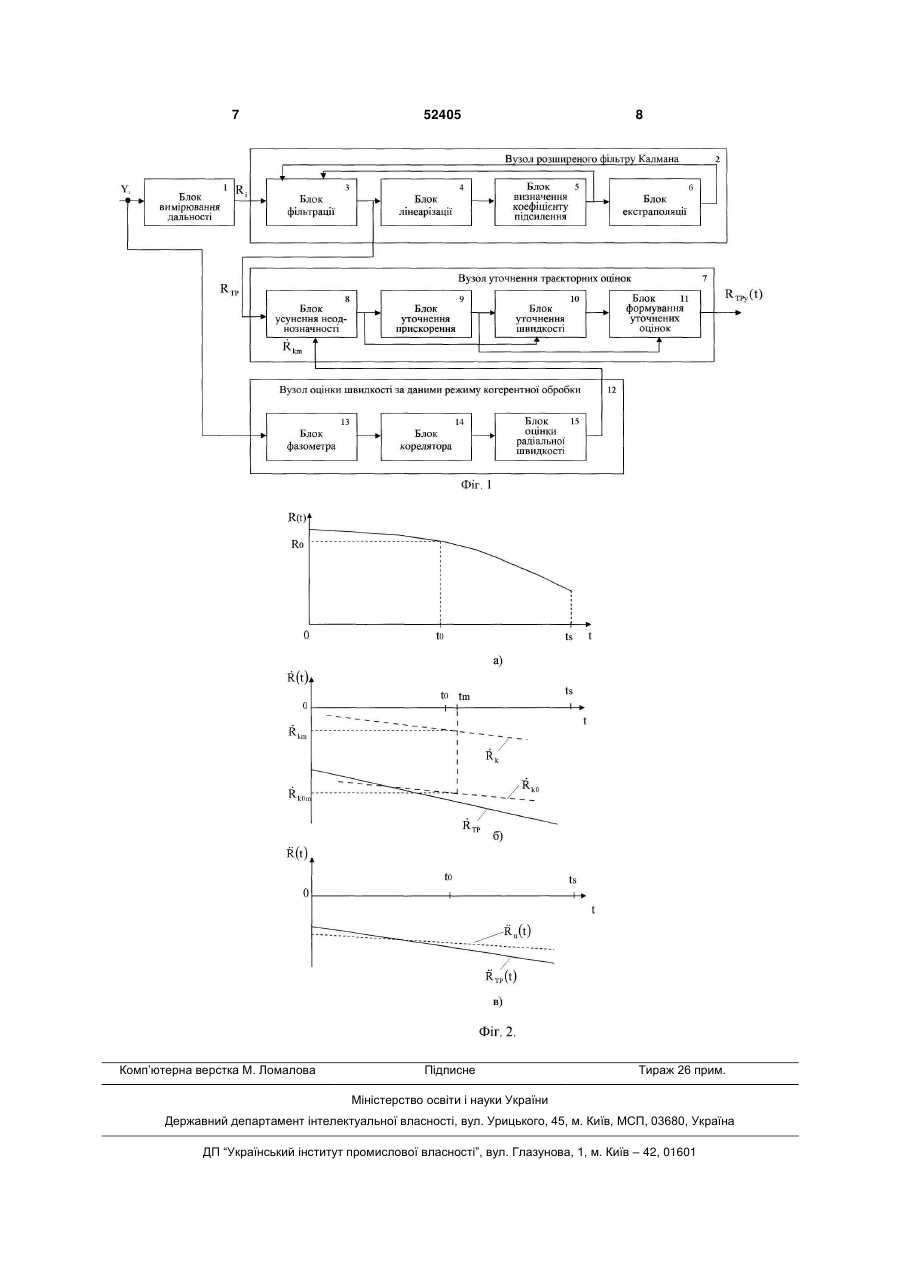
Пристрій фільтрації параметрів траєкторії цілі, що містить послідовно з'єднані блок вимірювання дальності і вузол розширеного фільтра Калмана у складі послідовно з'єднаних блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення і блока екстраполяції, який відрізняється тим, що додатково введені вузол уточнення траєкторних оцінок у складі послідовно з'єднаних блока усунення неоднозначності, блока уточнення прискорення, блока уточнення швидкості і блока формування уточнених оцінок, та вузол оцінки радіальної швидкості за даними режиму когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора і блока оцінки радіальної швидкості, причому виходи блоків визначення коефіцієнта підсилення та екстраполяції додатково з'єднані відповідно з другим та третім входами блока фільтрації, виходи блоків усунення неоднозначності та уточнення прискорення додатково з'єднані із другими входами відповідно блока уточнення швидкості і блока формування уточнених оцінок, вхід вузла оцінки швидкості за даними режиму когерентної обробки з'єднаний з входом пристрою, а вихід - з другим входом блока усунення неоднозначності, при цьому входом пристрою є вхід блока вимірювання дальності, а виходом - вихід блока формування уточнених оцінок.
Текст
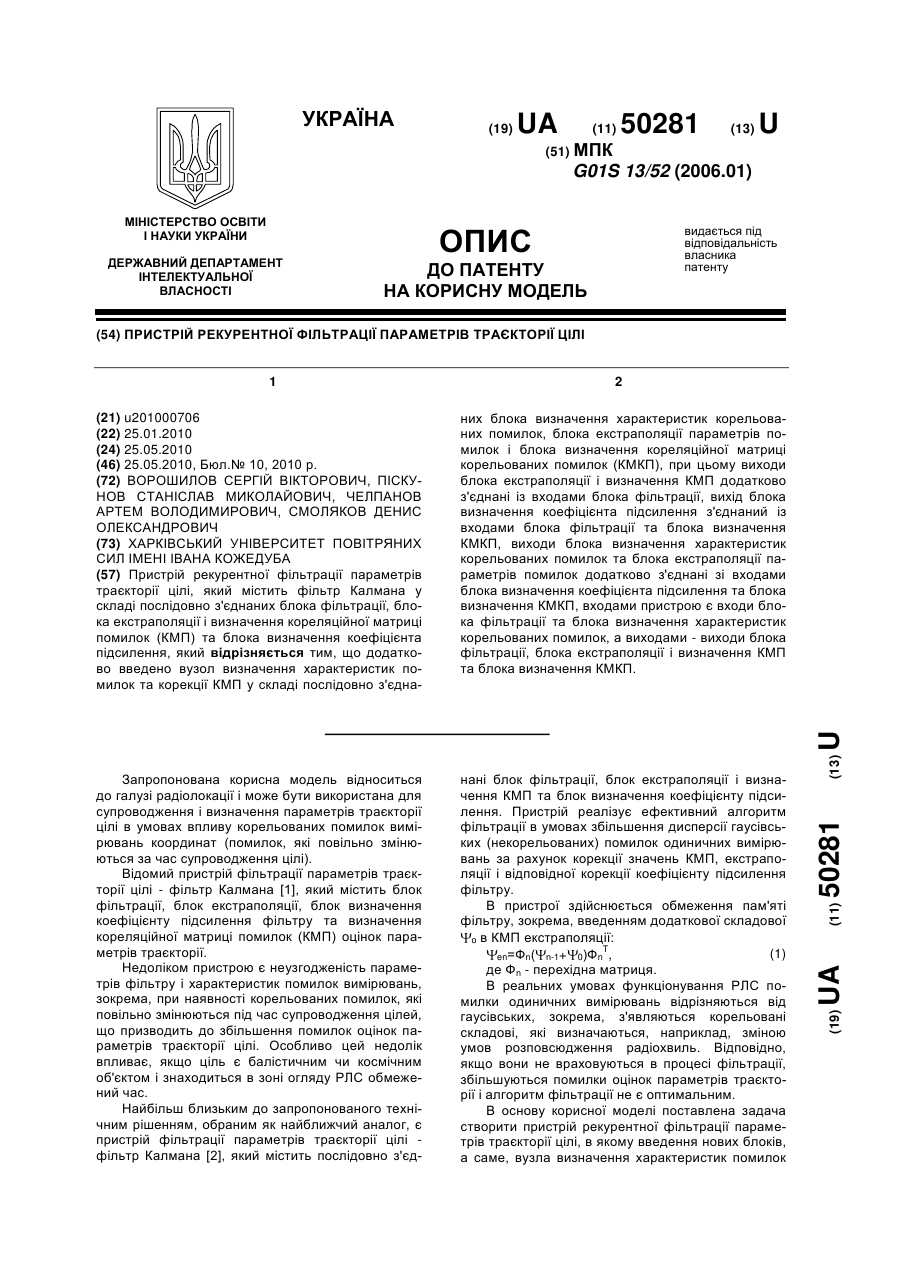
Пристрій фільтрації параметрів траєкторії цілі, що містить послідовно з'єднані блок вимірювання дальності і вузол розширеного фільтра Калмана у складі послідовно з'єднаних блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення і блока екстраполяції, який відрізняється тим, що додатково введені вузол уточнення траєкторних оцінок у складі послідовно з'єднаних блока усунення неоднозначності, блока уточнення прис 3 рентних оцінок параметрів траєкторії цілі за рахунок використання більш точних даних режиму когерентної обробки. Поставлена задача вирішується за рахунок того, що в пристрій - прототип додатково введені вузол уточнення траєкторних оцінок у складі послідовно з'єднаних блока усунення неоднозначності, блока уточнення прискорення, блока уточнення швидкості і блока формування уточнених оцінок, та вузол оцінки швидкості за даними режиму когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора і блока оцінки радіальної швидкості. Вихід блока фільтрації з'єднаний з першим входом блока усунення неоднозначності, вхід вузла оцінки швидкості за даними режиму когерентної обробки з'єднаний із входом пристрою, а вихід - з другим входом блока усунення неоднозначності. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає в уточненні траєкторних оцінок похідних дальності за більш точними, але неоднозначними даними режиму когерентної обробки. На Фіг.1 приведена структурна схема запропонованого пристрою. На Фіг.2 показано вид функцій зміни дальності, радіальної швидкості та прискорення цілі, отриманих за результатами рекурентної фільтрації та режиму когерентної обробки. Запропонований пристрій фільтрації параметрів траєкторії цілі містить послідовно з'єднані блок вимірювання дальності 1, вузол розширеного фільтра Калмана 2, вузол уточнення траєкторних оцінок 7 та вузол оцінки швидкості за даними режиму когерентної обробки 12. Вузол розширеного фільтра Калмана 2 складається з послідовно з'єднаних блока фільтрації 3, блока лінеаризації 4, блока визначення коефіцієнту підсилення 5 та блока екстраполяції 6, при цьому виходи блока визначення коефіцієнту підсилення та блока екстраполяції додатково з'єднані відповідно з другим та третім входами блока фільтрації 3. Вузол уточнення траєкторних оцінок 7 складається з послідовно з'єднаних блока усунення неоднозначності 8, блока уточнення прискорення 9, блока уточнення швидкості 10 та блока формування уточнених оцінок 11, при цьому виходи блока усунення неоднозначності та блока уточнення прискорення додатково з'єднані з другими входами відповідно блока уточнення швидкості та блока формування уточнених оцінок. Вузол оцінки швидкості за даними режиму когерентної обробки 12 складається з послідовно з'єднаних блока фазометра 13, блока корелятора 14, блока оцінки радіальної швидкості 15, при цьому вхід вузла з'єднаний зі входом пристрою, а вихід вузла - з другим входом блока усунення неоднозначності 8. Входом пристрою є входи блока вимірювання дальності 1 та блока фазометра 13, а виходом пристрою - вихід блока формування уточнених оцінок 11. Робота запропонованого пристрою полягає у наступному. На вхід блока вимірювання дальності 1 надходять луна-сигнали від цілей, які використовуються 52405 4 для отримання одиночних вимірів дальності Ri в моменти часу ti, де і=1, 2, ...s. В вузлі розширеного фільтра Калмана 2 здійснюється фільтрація вимірів Ri з отриманням реку рентних оцінок параметрів траєкторії R ТР , RТР , RТР у відповідності із співвідношеннями для розширеного фільтру Калмана [2], тобто побудова траєкторії цілі на момент часу t0: 1 R ТР t R ТР R ТР t t 0 R ТР t t 0 2 ,(1) 2 Для балістичних об'єктів визначається третя похідна на основі функціональних залежностей між параметрами балістичної траєкторії [3]: R R RТР 3 ТР ТР . (2) RТР Когерентна обробка здійснюється в вузлі оцінки швидкості 7. Для цього в блоці фазометра 13 в межах m-ой когерентної пачки із N сигналів формуються значення фази сигналів відносно фази зондуючого сигналу (чи сигналу когерентного гетеродина) φi. Отримана функція фази визначається параме трами руху цілі R 0 , R , R : 2 f i 2R i c 4 R ti R0 tm 1 R ti 2 t m 2 , (3) де - довжина хвилі; і = 1,2,...N. Оцінка радіальної швидкості цілі за даними ко герентної обробки Rkm , на поточний момент часу tm здійснюється методом кореляційної обробки отриманої функції фази φi. Для цього в блоці корелятора 14 обчислюються значення кореляційного інтегралу j, як результат порівняння функції фази φi з набором із J опорних (еталонних) функ цій фази з відомими параметрами R оп j , R оп j . j 1 N оп ij 2 N sin i i 1 4 Rоп j ti оп ij tm 2 N cos i i 1 1 Rоп j ti 2 оп ij tm 2 ; j ;(4) 1 2 ...J . , За оцінку швидкості Rkm , і прискорення Rkm , за даними режиму когерентної обробки приймаються параметри тієї (r-ой) опорної функції, при порівнянні з якою отримано максимальне значення кореляційного інтегралу r= mах: Rkm Rоп r ; Rkm Rоп r . Точні оцінки Rkm , Rkm формуються в блоці 15. Діапазон однозначного вимірювання радіальної швидкості в режимі когерентної обробки складає R0 , 2T де Т - період слідування імпульсів. При =2м, Т=40мс отримаємо R 0 25 м . с Діапазон реальних швидкостей цілей значно більший, тому використання оцінок Rkm для уточ 5 52405 нення траєкторних параметрів можливо із усуненням їх неоднозначності, яке здійснюється в блоці 8 вузла уточнення траєкторних оцінок 7: R R 1 Rk0m Rkm E ТРm km R0 , (5) 2 R0 де Е[∙] - ціла частина числа [∙]. Отримані в ході траєкторної обробки оцінки похідних дальності RТР , RТР уточнюються L вимірами Rk 0m за даними когерентної обробки. Спочатку уточнюються значення прискорення RТР (ступінь кривизни функції R(t), чи кут нахилу функції R( t )) . Для цього в блоці 9 здійснюється кореляційна обробка розносної функції Rm Rk 0m RТРm : Qr 1 L 2 exp j L R0 m 1 Rm Rоп m ; (6) 1 Rтр tm t0 2 . 2 Кореляційна обробка функції R m здійснюється за рахунок порівняння її з набором із М опо рних функцій Rоп rm , які мають різні кути нахи Rтр m Rтр Rтр tm лу, тобто різні параметри t0 Rоп rm : Rоп rm Rоп r tm t0 , Rоп 1 0 ; Rоп 2 R; Rоп 3 R; Rоп 4 2 R . Дискретність зміни параметра прискорення R визначається часом супроводження с і діапазоном однозначного вимірювання радіальної швидкості: R0 R . c Наприклад, при R 0 25 м та с=25 с в діас м пазоні аналізу R відносно R тр отри4 с2 , маємо R 10 м , J=9. с2 За поправку прискорення R у до значення оцінки RТР приймається параметр Rоп r тієї опорної функції, при порівнянні з якою отримане максимальне значення кореляційного інтегралу: Q max max Q r . r 6 В блоці 10 здійснюється уточнення траєктор ної оцінки радіальної швидкості цілі R тр даними режиму когерентної обробки. Відповідна поправка R у розраховується за співвідношенням: L sin i R0 arctg m 1 ; L 2 cos i m 1 Ry (7) 2 R Rm R y tm t0 . 0 При цьому попередньо віднімається складова за рахунок прискорення. В блоці 11 остаточно уточнюються траєкторні оцінки похідних дальності: Rтр y Rтр Ry; i Rтр y Rтр Ry. На вихід пристрою видаються параметри траєкторії цілі, отримані в ході рекурентної фільтрації, які уточнені даними режиму когерентної обробки, з усуненням неоднозначності їх відліку. Послідовність включення в роботу окремих блоків пристрою та їх взаємодія визначається сіткою керуючих і синхронізуючих імпульсів, "прив'язаних" до сітки частот синхронізатора РЛС (вузол синхронізації і керування на схемі пристрою не показаний). Точність оцінки за даними когерентної обробки складає величину Rк Rк . 2NT При =2м, N=16, Т=40мс отримаємо м . R к 1,56 с Тобто більш точні дані режиму когерентної обробки дозволяють підвищити точність оцінки параметрів траєкторії, які отримані за результатами рекурентної фільтрації. Джерела інформації: 1. Кузьмин С.З. Цифровая радиолокация. Введение в теорию - К.: КВІЦ, 2000 - С. 204. 2. Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. / Пер. с англ. - М.: Радио и связь, 1993. - С. 119. 3. Саврасов Ю.С. Алгоритмы и программы в радиолокации - М.: Радио и связь, 1985 - 216с. 7 Комп’ютерна верстка М. Ломалова 52405 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for filtration of parameters of trajectory of a target
Автори англійськоюOrekhov Serhii Vasyliovych, Piskunov Stanislav Mykolaiovych, Chelpanov Volodymyr Valentynovych, Akulinin Hlib Vasyliovych
Назва патенту російськоюУстройство фильтрации параметров траектории цели
Автори російськоюОрехов Сергей Васильевич, Пискунов Станислав Николаевич, Челпанов Владимир Валентинович, Акулинин Глеб Васильевич
МПК / Мітки
МПК: G01S 13/52
Мітки: параметрів, цілі, фільтрації, пристрій, траєкторії
Код посилання
<a href="https://ua.patents.su/4-52405-pristrijj-filtraci-parametriv-traehktori-cili.html" target="_blank" rel="follow" title="База патентів України">Пристрій фільтрації параметрів траєкторії цілі</a>
Пристрій рекурентної фільтрації параметрів траєкторії цілі
Номер патенту: 50281
Опубліковано: 25.05.2010
Автори: Челпанов Артем Володимирович, Смоляков Денис Олександрович, Ворошилов Сергій Вікторович, Піскунов Станіслав Миколайович
МПК: G01S 13/52
Мітки: параметрів, цілі, рекурентної, пристрій, траєкторії, фільтрації
Формула / Реферат:
Пристрій рекурентної фільтрації параметрів траєкторії цілі, який містить фільтр Калмана у складі послідовно з'єднаних блока фільтрації, блока екстраполяції і визначення кореляційної матриці помилок (КМП) та блока визначення коефіцієнта підсилення, який відрізняється тим, що додатково введено вузол визначення характеристик помилок та корекції КМП у складі послідовно з'єднаних блока визначення характеристик корельованих помилок, блока...
Пристрій фільтрації параметрів траєкторії цілі
Номер патенту: 12818
Опубліковано: 15.03.2006
Автори: Петрушенко Микола Миколайович, Луковський Олег Ярославович, Челпанов Артем Володимирович, Коваль Олександр Андрійович, Квіткін Костянтин Петрович, Карлов Володимир Дмитрович
МПК: G01S 13/52
Мітки: траєкторії, параметрів, пристрій, цілі, фільтрації
Формула / Реферат:
Пристрій фільтрації параметрів траєкторії цілі, що містить лінійний фільтр Калмана, N паралельно включених узгоджених фільтрів, блок вибору максимуму і блок порівняння з порогом, який відрізняється тим, що додатково введений другий фільтр Калмана, блок аналізу динамічних помилок, блок аналізу оцінок і блок комутатора, причому перший вихід першого фільтра Калмана з'єднаний із входом блока аналізу динамічних помилок, другий вихід - із входом...
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі

Номер патенту: 19892
Опубліковано: 15.01.2007
Автори: Квіткін Костянтин Петрович, Луковський Олег Ярославович, Петрушенко Микола Миколайович, Карлов Володимир Дмитрович, Челпанов Артем Володимирович, Гаврілкін Володимир Вільевич
МПК: G01S 13/52
Мітки: цілі, траєкторії, адаптивний, фільтрації, маневруючої, пристрій, параметрів
Формула / Реферат:
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі, що містить фільтр Калмана 2-го порядку, фільтр Калмана 3-го порядку і комутатор, який відрізняється тим, що додатково введені блок формування вибірки, блок корегування кореляційної матриці помилок (КМП) вимірювань у складі послідовно з'єднаних першого блока оцінювання середнього, першого блока оцінювання КМП фільтрації і блока розрахунку КМП вимірювань, блок виявлення і...
Адаптивний фільтр оцінки параметрів траєкторії цілі
Номер патенту: 48843
Опубліковано: 15.08.2002
Автори: Карлов Володимир Дмитрович, Челпанов Артем Володимирович, Фик Олександр Ілліч, Савченко Микола Павлович
МПК: G01S 13/52, G01S 13/00
Мітки: оцінки, адаптивний, траєкторії, параметрів, цілі, фільтр
Формула / Реферат:
Адаптивний фільтр оцінки параметрів траєкторії цілі, що містить блок обчислення кореляційної матриці помилок, послідовно з'єднані блок обчислення оцінок параметрів, пристрій що запам'ятовує та блок екстраполяції параметрів, який відрізняється тим, що додатково введено блок фазометра і вузол оцінки швидкості та прискорення у складі послідовно з'єднаних блоків генератора опорних функцій, блоку вирахування, корелятора і блоку формування оцінок,...
Адаптивний пристрій фільтрації параметрів траєкторії цілей
Номер патенту: 67043
Опубліковано: 15.06.2004
Автори: Яровий Сергій Володимирович, Челпанов Артем Володимирович, Петрушенко Миколай Миколайович, Карлов Володимир Дмитрийович, Рафальський Юрій Іванович
МПК: G01S 13/52
Мітки: адаптивний, пристрій, параметрів, фільтрації, траєкторії, цілей
Формула / Реферат:
Адаптивний пристрій фільтрації параметра траєкторії цілі, що містить фільтр Калмана, пороговий блок і блок вибору максимуму, який відрізняється тим, що додатково введені три блоки пам'яті, блок суматора, блок формування вибірки, блок оцінки прискорення і блок корекції, до того ж, перший блок пам'яті, блок фільтра Калмана, другий блок пам'яті, блок суматора, блок формування вибірки, пороговий блок і блок вибору максимуму з'єднані послідовно,...
Попередній патент: Спосіб метрологічного діагностування вимірювальних трубопроводів із загальними вхідним і вихідним колекторами, які входять до складу витратомірів газу
Наступний патент: Спосіб лікування експериментальної виразки шлунку та дванадцятипалої кишки у тварин
Випадковий патент: Спосіб відбору молока-сировини для виготовлення сиру кисломолочного за ознаками його якості