Пристрій рекурентної фільтрації параметрів траєкторії цілі
Номер патенту: 50281
Опубліковано: 25.05.2010
Автори: Піскунов Станіслав Миколайович, Ворошилов Сергій Вікторович, Смоляков Денис Олександрович, Челпанов Артем Володимирович
Формула / Реферат
Пристрій рекурентної фільтрації параметрів траєкторії цілі, який містить фільтр Калмана у складі послідовно з'єднаних блока фільтрації, блока екстраполяції і визначення кореляційної матриці помилок (КМП) та блока визначення коефіцієнта підсилення, який відрізняється тим, що додатково введено вузол визначення характеристик помилок та корекції КМП у складі послідовно з'єднаних блока визначення характеристик корельованих помилок, блока екстраполяції параметрів помилок і блока визначення кореляційної матриці корельованих помилок (КМКП), при цьому виходи блока екстраполяції і визначення КМП додатково з'єднані із входами блока фільтрації, вихід блока визначення коефіцієнта підсилення з'єднаний із входами блока фільтрації та блока визначення КМКП, виходи блока визначення характеристик корельованих помилок та блока екстраполяції параметрів помилок додатково з'єднані зі входами блока визначення коефіцієнта підсилення та блока визначення КМКП, входами пристрою є входи блока фільтрації та блока визначення характеристик корельованих помилок, а виходами - виходи блока фільтрації, блока екстраполяції і визначення КМП та блока визначення КМКП.
Текст
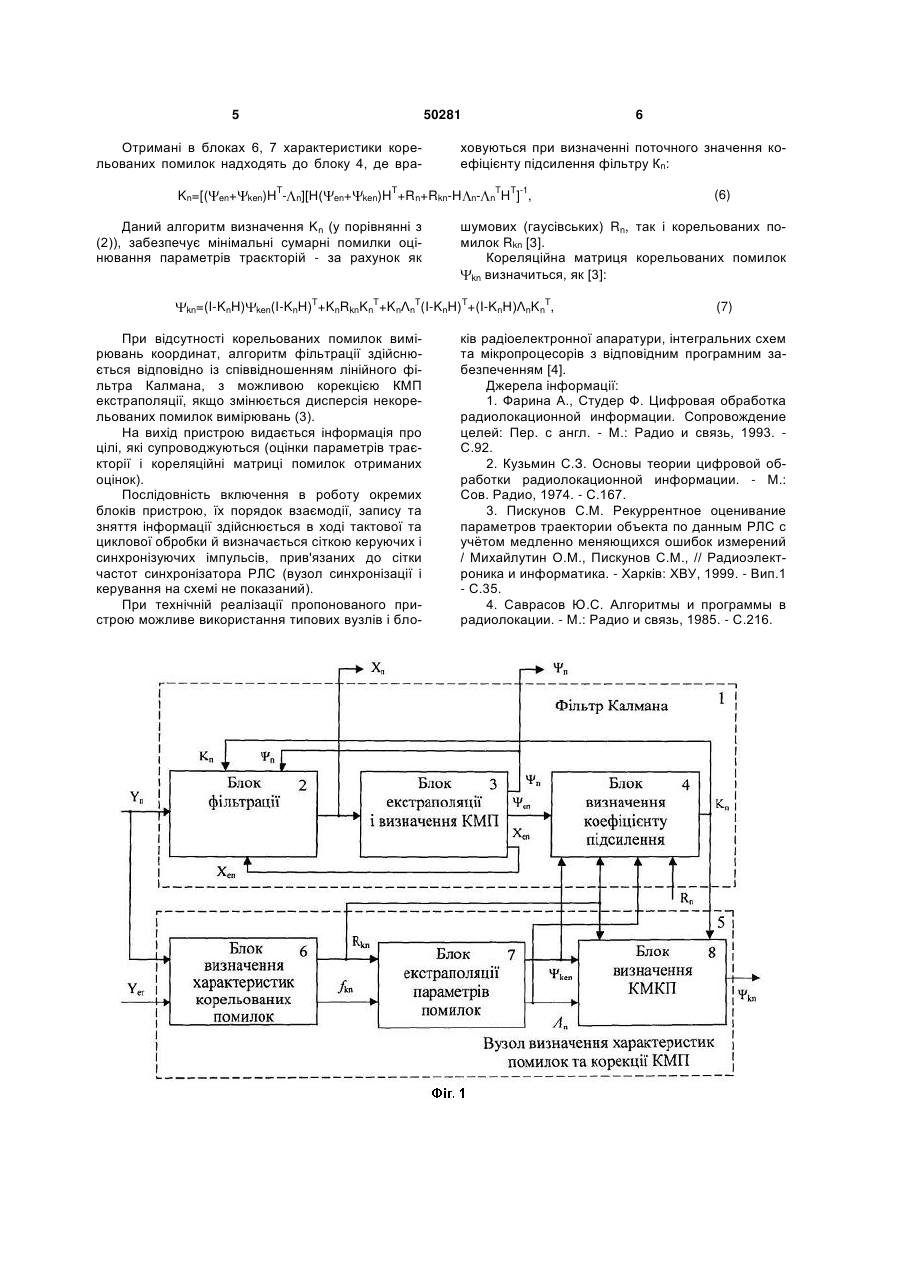
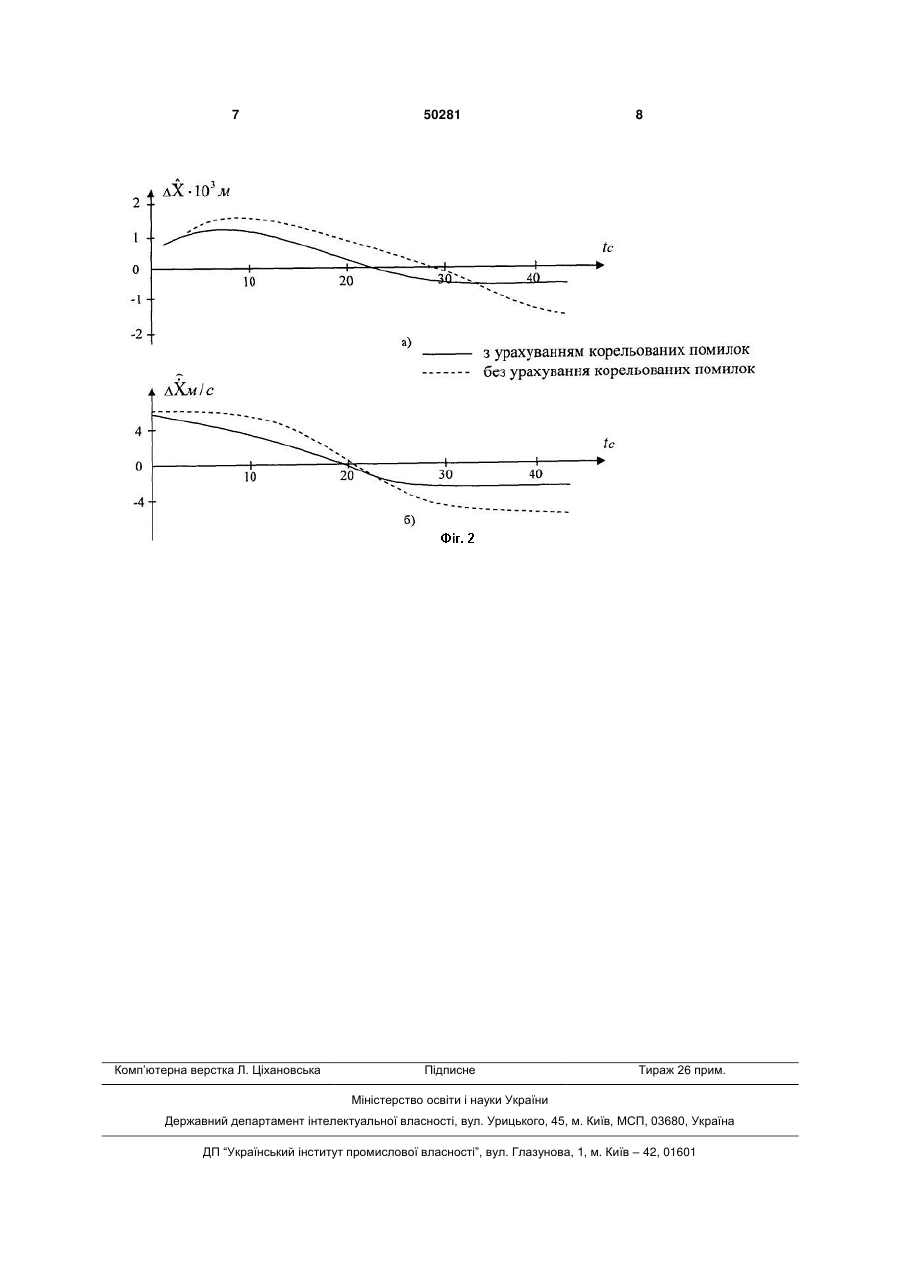
Пристрій рекурентної фільтрації параметрів траєкторії цілі, який містить фільтр Калмана у складі послідовно з'єднаних блока фільтрації, блока екстраполяції і визначення кореляційної матриці помилок (КМП) та блока визначення коефіцієнта підсилення, який відрізняється тим, що додатково введено вузол визначення характеристик помилок та корекції КМП у складі послідовно з'єдна 3 та корекції КМП у складі послідовно з'єднаних блока визначення характеристик корельованих помилок, блока екстраполяції параметрів помилок та блока визначення кореляційної матриці корельованих помилок (КМКП) дозволить забезпечити більш точні оцінки параметрів траєкторії цілі. Поставлена задача вирішується за рахунок того, що в пристрій фільтрації параметрів траєкторії - фільтр Калмана [2], який містить послідовно з'єднані блок фільтрації, блок екстраполяції і визначення КМП, та блок визначення коефіцієнту підсилення, додатково введено вузол визначення характеристик помилок та корекції КМП у складі послідовно з'єднаних блока визначення характеристик корельованих помилок, блока екстраполяції параметрів помилок та блока визначення КМКП. Визначення характеристик корельованих помилок вимірювань координат здійснюється за даними супроводження контрольних цілей і еталонних об'єктів (зокрема, космічних з відомими орбітальними параметрами) та за даними системи юстирування. Перший вихід блоку визначення характеристик корельованих помилок додатково з'єднаний зі входами блока визначення коефіцієнту підсилення і блока визначення КМКП. Виходи блока екстраполяції параметрів помилок додатково з'єднані зі входами блока визначення коефіцієнту підсилення. Вихід блока визначення коефіцієнту підсилення з'єднаний зі входами блока фільтрації і блока визначення КМКП. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає в уточненні оцінок параметрів траєкторії і підвищенні сталості супроводження за рахунок визначення характеристик корельованих помилок одиничних вимірювань координат і відповідної рекурентної корекції значень кореляційної матриці помилок та коефіцієнту підсилення фільтру. На Фіг.1 приведена структурна схема запропонованого пристрою. На Фіг.2 приведені типові залежності помилок оцінок параметрів траєкторії без урахування та з урахуванням корельованих помилок вимірювань (дані отримані за результатами цифрового моделювання траєкторної обробки радіолокаційної інформації). Запропонований пристрій рекурентної фільтрації параметрів траєкторії цілі містить фільтр Калмана 1 у складі послідовно з'єднаних блока фільтрації 2, блока екстраполяції і визначення КМП 3, блока визначення коефіцієнту підсилення 4 та вузол визначення характеристик помилок та корекції КМП 5 у складі послідовно з'єднаних блока визначення характеристик корельованих помилок 6, блока екстраполяції параметрів помилок 7 і блока визначення КМКП 8. Виходи блока екстраполяції і визначення КМП 3 додатково з'єднані зі входами блока фільтрації. Вихід блока визначення коефіцієнту підсилення з'єднаний зі входами блока фільтрації і блока визначення КМКП. Виходи блока визначення характеристик корельованих помилок та блока екстраполяції параметрів помилок додатково з'єднані зі входами визна 50281 4 чення коефіцієнту підсилення та блока визначення КМКП. Входами пристрою є входи блока фільтрації 2 та блока визначення характеристик корельованих помилок 6, а виходами - виходи блока фільтрації, блока екстраполяції і визначення КМП 3 і блока визначення КМКП 8. Робота запропонованого пристрою полягає у наступному. На вхід блока фільтрації за час супроводження надходять результати одиничних вимірювань координат цілей Yn в моменти часу tn, де n - номер циклу супроводження, n=1, 2, 3,..., здійснюється рекурентне згладжування вимірів відповідно із співвідношеннями для фільтра Калмана [1, 2], зокрема, формуються поточні значення оцінок параˆ метрів траєкторії Xn та кореляційної матриці помилок (КМП) оцінок n: ˆ Xn X en K n Yn HX en , (2) n en K nH en де Хеn, еn - екстрапольовані значення відповідно координати X та КМП екстраполяції; Kn - коефіцієнт підсилення фільтра; Н - матриця перерахунку. Поточні значення Хеn, еn та n визначаються в блоці 3 з використанням рекурентних співвідношень фільтра Калмана на основі даних попередніх циклів супроводження цілі. Коефіцієнт підсилення фільтру Кn визначиться як (3) Kn= nHT(H enHT+Rn)-1, де Rn - кореляційна матриця помилок одиночних вимірювань. Значення Rn звичайно вважають відомими, наприклад, розподіленими по нормальному закону з нульовим середнім, при цьому алгоритм фільтрації буде оптимальним за критерієм максимальної правдоподібності. Порівняння одиночних вимірювань Yn і еталонних даних Yeт здійснюється в блоці 6, по результатам якого визначаються характеристики корельованих помилок, зокрема, значення, корельованих складових помилок вимірювань Ykn, значення кореляційної матриці корельованих помилок (КМКП) Rkn та параметри функції fkn, відповідно з якою змінюються постійні складові цих помилок на інтервалі супроводження цілі: (4) Rkn=M[ Ykn·YnT], де М [ ] - математичне очікування [ ]; Ykn= Yko fn, де Yko - випадкова складова з нульовим середнім і заданою кореляційною матрицею. Отримані характеристики Rkn та fkn використовуються в блоці 7 для розрахунку поточних значень кореляційної матриці корельованих помилок екстраполяції ken і матриці коефіцієнтів кореляції n: T ken=M[ Xken· Xken ], (5) T n=M[ Xken· Ykn ] де Xken - помилки екстраполяції оцінок параметрів траєкторії за рахунок корельованих складових помилок вимірювань. 5 50281 Отримані в блоках 6, 7 характеристики корельованих помилок надходять до блоку 4, де враKn=[( en+ T ken)H n][Н( en+ kn=(I-KnH) ховуються при визначенні поточного значення коефіцієнту підсилення фільтру Кn: T ken)H +Rn+Rkn-H Даний алгоритм визначення Kn (у порівнянні з (2)), забезпечує мінімальні сумарні помилки оцінювання параметрів траєкторій - за рахунок як 6 n T T -1 n H ] , шумових (гаусівських) Rn, так і корельованих помилок Rkn [3]. Кореляційна матриця корельованих помилок kn визначиться, як [3]: T T T T T ken(I-KnH) +KnRknKn +KnΛn (I-KnH) +(I-KnH)ΛnKn , При відсутності корельованих помилок вимірювань координат, алгоритм фільтрації здійснюється відповідно із співвідношенням лінійного фільтра Калмана, з можливою корекцією КМП екстраполяції, якщо змінюється дисперсія некорельованих помилок вимірювань (3). На вихід пристрою видається інформація про цілі, які супроводжуються (оцінки параметрів траєкторії і кореляційні матриці помилок отриманих оцінок). Послідовність включення в роботу окремих блоків пристрою, їх порядок взаємодії, запису та зняття інформації здійснюється в ході тактової та циклової обробки й визначається сіткою керуючих і синхронізуючих імпульсів, прив'язаних до сітки частот синхронізатора РЛС (вузол синхронізації і керування на схемі не показаний). При технічній реалізації пропонованого пристрою можливе використання типових вузлів і бло (6) (7) ків радіоелектронної апаратури, інтегральних схем та мікропроцесорів з відповідним програмним забезпеченням [4]. Джерела інформації: 1. Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей: Пер. с англ. - М.: Радио и связь, 1993. С.92. 2. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Сов. Радио, 1974. - С.167. 3. Пискунов С.М. Рекуррентное оценивание параметров траектории объекта по данным РЛС с учѐтом медленно меняющихся ошибок измерений / Михайлутин О.М., Пискунов С.М., // Радиоэлектроника и информатика. - Харків: ХВУ, 1999. - Вип.1 - С.35. 4. Саврасов Ю.С. Алгоритмы и программы в радиолокации. - М.: Радио и связь, 1985. - С.216. 7 Комп’ютерна верстка Л. Ціхановська 50281 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for recurring filtration of parameters of target trajectory
Автори англійськоюVoroshylov Sergii Viktorovych, Piskunov Stanislav Mykolaiovych, Chelpanov Artem Volodymyrovych, Smoliakov Denys Oleksandrovych
Назва патенту російськоюУстройство рекуррентной фильтрации параметров траектории цели
Автори російськоюВорошилов Сергей Викторович, Пискунов Станислав Николаевич, Челпанов Артем Владимирович, Смоляков Денис Александрович
МПК / Мітки
МПК: G01S 13/52
Мітки: рекурентної, траєкторії, фільтрації, цілі, параметрів, пристрій
Код посилання
<a href="https://ua.patents.su/4-50281-pristrijj-rekurentno-filtraci-parametriv-traehktori-cili.html" target="_blank" rel="follow" title="База патентів України">Пристрій рекурентної фільтрації параметрів траєкторії цілі</a>
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі

Номер патенту: 19892
Опубліковано: 15.01.2007
Автори: Карлов Володимир Дмитрович, Петрушенко Микола Миколайович, Луковський Олег Ярославович, Гаврілкін Володимир Вільевич, Челпанов Артем Володимирович, Квіткін Костянтин Петрович
МПК: G01S 13/52
Мітки: адаптивний, маневруючої, цілі, параметрів, траєкторії, пристрій, фільтрації
Формула / Реферат:
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі, що містить фільтр Калмана 2-го порядку, фільтр Калмана 3-го порядку і комутатор, який відрізняється тим, що додатково введені блок формування вибірки, блок корегування кореляційної матриці помилок (КМП) вимірювань у складі послідовно з'єднаних першого блока оцінювання середнього, першого блока оцінювання КМП фільтрації і блока розрахунку КМП вимірювань, блок виявлення і...
Пристрій фільтрації параметрів траєкторії цілі
Номер патенту: 12818
Опубліковано: 15.03.2006
Автори: Луковський Олег Ярославович, Петрушенко Микола Миколайович, Коваль Олександр Андрійович, Карлов Володимир Дмитрович, Челпанов Артем Володимирович, Квіткін Костянтин Петрович
МПК: G01S 13/52
Мітки: фільтрації, параметрів, траєкторії, пристрій, цілі
Формула / Реферат:
Пристрій фільтрації параметрів траєкторії цілі, що містить лінійний фільтр Калмана, N паралельно включених узгоджених фільтрів, блок вибору максимуму і блок порівняння з порогом, який відрізняється тим, що додатково введений другий фільтр Калмана, блок аналізу динамічних помилок, блок аналізу оцінок і блок комутатора, причому перший вихід першого фільтра Калмана з'єднаний із входом блока аналізу динамічних помилок, другий вихід - із входом...
Адаптивний фільтр оцінки параметрів траєкторії цілі
Номер патенту: 48843
Опубліковано: 15.08.2002
Автори: Челпанов Артем Володимирович, Фик Олександр Ілліч, Савченко Микола Павлович, Карлов Володимир Дмитрович
МПК: G01S 13/00, G01S 13/52
Мітки: адаптивний, фільтр, цілі, параметрів, оцінки, траєкторії
Формула / Реферат:
Адаптивний фільтр оцінки параметрів траєкторії цілі, що містить блок обчислення кореляційної матриці помилок, послідовно з'єднані блок обчислення оцінок параметрів, пристрій що запам'ятовує та блок екстраполяції параметрів, який відрізняється тим, що додатково введено блок фазометра і вузол оцінки швидкості та прискорення у складі послідовно з'єднаних блоків генератора опорних функцій, блоку вирахування, корелятора і блоку формування оцінок,...
Адаптивний пристрій фільтрації параметрів траєкторії цілей
Номер патенту: 67043
Опубліковано: 15.06.2004
Автори: Петрушенко Миколай Миколайович, Рафальський Юрій Іванович, Карлов Володимир Дмитрийович, Челпанов Артем Володимирович, Яровий Сергій Володимирович
МПК: G01S 13/52
Мітки: фільтрації, цілей, пристрій, параметрів, траєкторії, адаптивний
Формула / Реферат:
Адаптивний пристрій фільтрації параметра траєкторії цілі, що містить фільтр Калмана, пороговий блок і блок вибору максимуму, який відрізняється тим, що додатково введені три блоки пам'яті, блок суматора, блок формування вибірки, блок оцінки прискорення і блок корекції, до того ж, перший блок пам'яті, блок фільтра Калмана, другий блок пам'яті, блок суматора, блок формування вибірки, пороговий блок і блок вибору максимуму з'єднані послідовно,...
Пристрій для визначення траєкторії сегментації ембріона
Номер патенту: 39418
Опубліковано: 25.02.2009
Автори: Смеляков Кирило Сергійович, Елькін Борис Соломонович, Путятін Валерій Петрович, Елькін Олександр Борисович
МПК: A61D 19/02
Мітки: пристрій, визначення, траєкторії, ембріона, сегментації
Формула / Реферат:
Пристрій для визначення траєкторії сегментації ембріона, який містить освітлення у прохідному світлі чашки Петрі з поживною речовиною, де знаходиться біоматеріал (ембріон), одержання та кодування оптичної інформації за допомогою відповідно мікроскопа та підключеної до нього телекамери, який відрізняється тим, що введено блок обробки оптичної інформації, блок аналізу структури бластомерів, блок розрахунку траєкторії, блок задання відхилення...
Попередній патент: Спосіб лікування захворювань пародонта
Наступний патент: Пристрій калоприймача при коло- та ілеостомах
Випадковий патент: Мийна машина для зерна камінського в.д.