Пристрій фільтрації параметрів траєкторії цілі
Номер патенту: 93389
Опубліковано: 25.09.2014
Автори: Челпанов Артем Володимирович, Рибалка Григорій Валерійович, Меленті Євген Олександрович, Андрєєв Фелікс Михайлович, Статкус Андрій Віталійович
Формула / Реферат
Пристрій фільтрації параметрів траєкторії цілі, який містить послідовно з'єднані блок вимірювання дальності, вузол розширеного фільтра Калмана, вузол уточнення траєкторних оцінок та вузол оцінки швидкості за даними режиму когерентної обробки, який відрізняється тим, що додатково введені блок остаточного уточнення прискорення та блок остаточної оцінки радіальної швидкості, вузол розширеного фільтра Калмана у складі послідовно з'єднаного блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення і блока екстраполяції, вузол уточнення траєкторних оцінок, який містить послідовно з'єднані блок уточнення прискорення, блок уточнення швидкості, блок усунення неоднозначності і блок формування уточнених оцінок, вузол оцінки швидкості за даними режиму когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора, блока оцінки радіальної швидкості і блока остаточної оцінки радіальної швидкості, причому вихід блока вимірювання дальності з'єднаний з входом блока фільтрації, виходи блоків визначення коефіцієнта підсилення і екстраполяції додатково з'єднані відповідно з другим і третім входами блока фільтрації, вихід блока фільтрації з'єднаний з першим входом блока уточнення прискорення та третіми входами блока усунення неоднозначності і блока формування уточнених оцінок, вихід блока остаточної оцінки радіальної швидкості з'єднаний з другими входами блока усунення неоднозначності і блока уточнення прискорення, вихід блока остаточного уточнення прискорення додатково з'єднаний з четвертим входом блока усунення неоднозначності та другим входом блока формування уточнених оцінок, другий вихід блока уточнення швидкості з'єднаний з другим входом блока корелятора, при цьому входом пристрою є входи блоків вимірювання дальності та фазометра, а виходом - вихід блока формування уточнених оцінок.
Текст
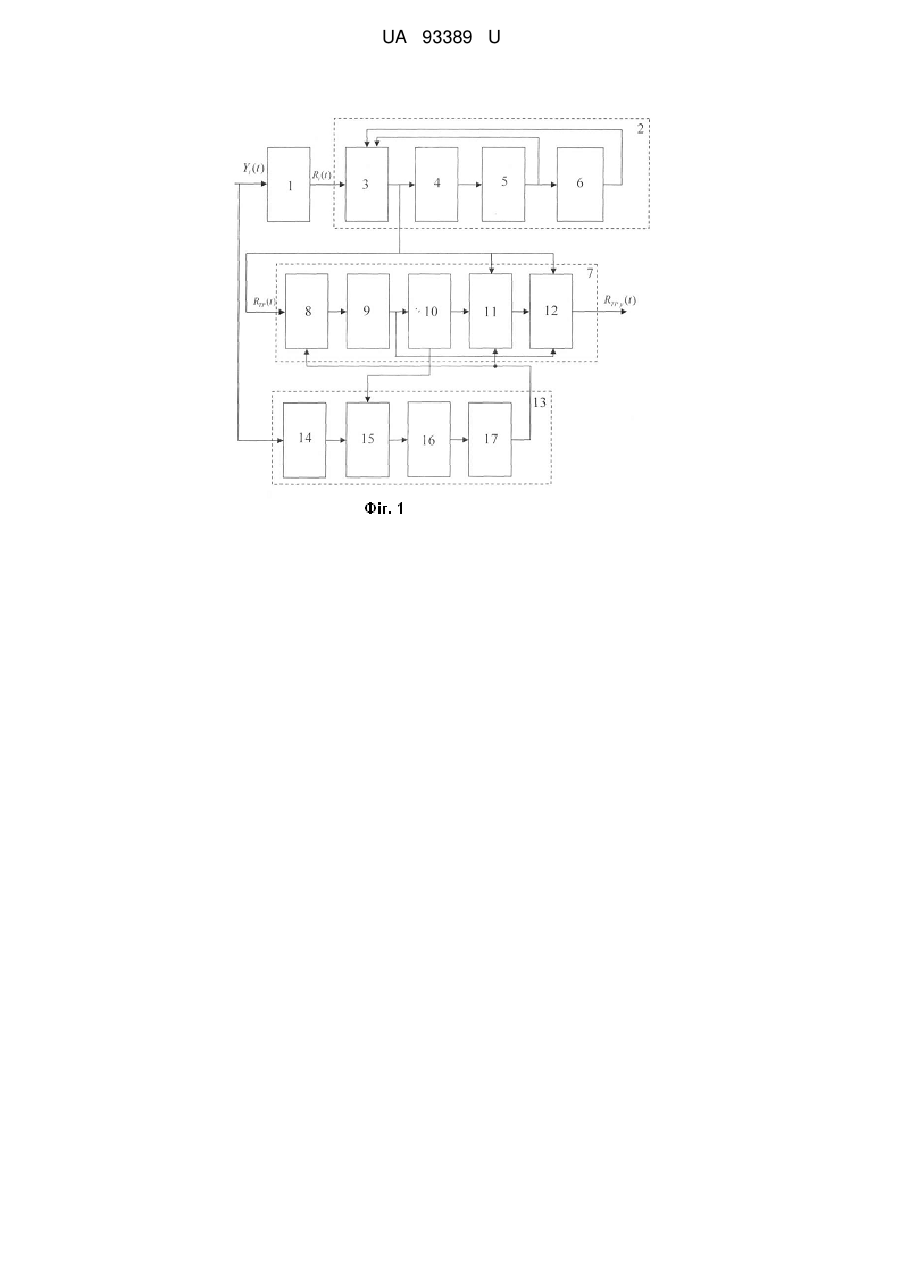
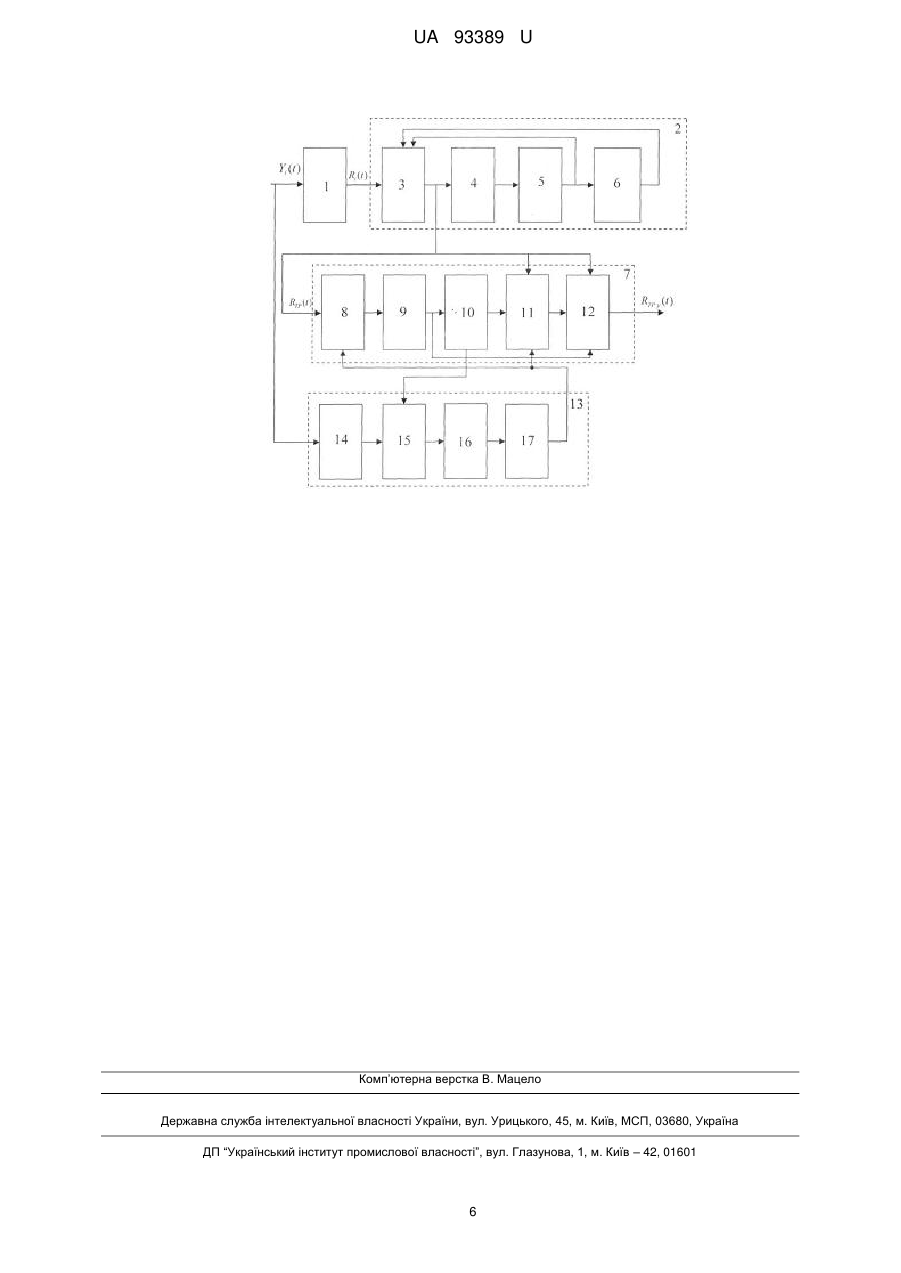
Реферат: Пристрій фільтрації параметрів траєкторії цілі містить послідовно з'єднані блок вимірювання дальності, вузол розширеного фільтра Калмана, вузол уточнення траєкторних оцінок та вузол оцінки швидкості за даними режиму когерентної обробки. Додатково введені блок остаточного уточнення прискорення та блок остаточної оцінки радіальної швидкості, вузол розширеного фільтра Калмана у складі послідовно з'єднаного блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення і блока екстраполяції, вузол уточнення траєкторних оцінок, який містить послідовно з'єднані блок уточнення прискорення, блок уточнення швидкості, блок усунення неоднозначності і блок формування уточнених оцінок, вузол оцінки швидкості за даними режиму когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора, блока оцінки радіальної швидкості і блока остаточної оцінки радіальної швидкості. UA 93389 U (54) ПРИСТРІЙ ФІЛЬТРАЦІЇ ПАРАМЕТРІВ ТРАЄКТОРІЇ ЦІЛІ UA 93389 U UA 93389 U 5 10 15 20 25 30 35 40 45 50 55 60 Запропонована корисна модель належить до галузі радіолокації і може бути використана для побудови траєкторії цілі і уточнення її параметрів за даними режиму когерентної обробки. Відомий пристрій фільтрації параметрів траєкторії цілі [1], який містить блок вимірювання дальності та вузол розширеного фільтра Калмана у складі послідовно з'єднаних блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення і блока екстраполяції. Пристрій реалізує нелінійний алгоритм обробки радіолокаційної інформації в умовах невідповідності обраної моделі руху цілі її реальної траєкторії. Недоліком пристрою є недостатньо висока точність побудови параметрів траєкторії цілі, яка обмежується відносно грубими вимірами дальності з використанням огинаючих луна-сигналів. Особливо цей недолік впливає, якщо ціль є балістичною чи космічним об'єктом і знаходиться в зоні огляду РЛС обмежений час. Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип, є пристрій фільтрації параметрів траєкторії цілі [2], який містить послідовно з'єднані блок вимірювання дальності, вузол розширеного фільтра Калмана, вузол уточнення траєкторних оцінок, у складі послідовно з'єднаних блока усунення неоднозначності, блока уточнення прискорення R(2) (другої похідної дальності), блока уточнення швидкості R( 2) (першої похідної дальності) і блока формування уточнених оцінок та вузол оцінки швидкості за даними режиму когерентної обробки, у складі послідовно з'єднаних блока фазометра, блока корелятора і блока оцінки радіальної швидкості. Пристрій реалізує алгоритм обробки радіолокаційної інформації в умовах невідповідності обраної моделі руху цілі її реальної траєкторії за рахунок використання більш точних даних режиму когерентної обробки пачечного луна - сигналу із N імпульсів про радіальну швидкість цілі. Недоліком пристрою-прототипу є недостатньо висока точність побудови параметрів траєкторії цілі через помилки дискретності вимірювань радіальної швидкості та ймовірність наявності грубих помилок за рахунок неврахування вищих похідних дальності при проведенні процедури усунення неоднозначності вимірювань радіальної швидкості за даними режиму когерентної обробки. В основу корисної моделі поставлена задача створити пристрій фільтрації параметрів траєкторії цілі, в якому введення нових блоків і зміна порядку та алгоритму обробки інформації забезпечить усунення грубих помилок та підвищення точності побудови параметрів траєкторії цілі. Поставлена задача вирішується за рахунок того, що у вузол оцінки радіальної швидкості за даними режиму когерентної обробки введений блок остаточної оцінки радіальної швидкості, вхід якого підключений до виходу існуючого блока оцінки радіальної швидкості, а вихід до других входів блоків уточнення прискорення та усунення неоднозначності, розташованих у вузлі уточнення траєкторних оцінок, в який додатково введені блок остаточного уточнення прискорення, блок уточнення швидкості, блок усунення неоднозначності та блок формування уточнених оцінок. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає в підвищенні точності оцінок похідних дальності за рахунок зменшення похибок дискретності та підвищенні ймовірності усунення неоднозначності вимірювань радіальної швидкості в когерентному режимі за рахунок використання для цього значень поправок швидкості, а також поправок прискорення (третій похідної для балістичних об'єктів). На кресленні приведена структурна схема запропонованого пристрою. Запропонований пристрій фільтрації параметрів траєкторії цілі містить послідовно з'єднані блок вимірювання дальності 1, вузол розширеного фільтра Калмана 2, вузол уточнення траєкторних оцінок 7 та вузол оцінки швидкості за даними режиму когерентної обробки 13. Вузол розширеного фільтра Калмана 2, який містить послідовно з'єднані блок фільтрації 3, блок лінеаризації 4, блок визначення коефіцієнта підсилення 5 і блок екстраполяції 6. Вузол уточнення траєкторних оцінок 7 містить послідовно з'єднані блок уточнення прискорення 8, блок уточнення швидкості 10, блок усунення неоднозначності 11 і блок формування уточнених оцінок 12. Вузол оцінки швидкості за даними режиму когерентної обробки 13 містить послідовно з'єднані блок фазометра 14, блок корелятора 15, блок оцінки радіальної швидкості 16 і блок остаточної оцінки радіальної швидкості 17, причому вихід блока вимірювання дальності 1 з'єднаний з входом блока фільтрації 3. Виходи блоків визначення коефіцієнта підсилення 5 і екстраполяції 6 додатково з'єднані відповідно з другим і третім входами блока фільтрації 3. Вихід блока фільтрації 3 з'єднаний з першим входом блока уточнення прискорення 8 та третіми входами блока усунення неоднозначності 11 і блока формування уточнених оцінок 12. Вихід блока остаточної оцінки радіальної швидкості 17 з'єднаний з другими входами блока усунення неоднозначності 11 і блока уточнення прискорення 8. Вихід блока остаточного уточнення 1 UA 93389 U 5 прискорення 9 додатково з'єднаний з четвертим входом блока усунення неоднозначності 11 та другим входом блока формування уточнених оцінок 12. Другий вихід блока уточнення швидкості 10 з'єднаний з другим входом блока корелятора 15, при цьому входом пристрою є входи блоків вимірювання дальності 1 та фазометра 14, а виходом - вихід блока формування уточнених оцінок 12. Робота запропонованого пристрою полягає у наступному. На вхід блока вимірювання дальності 1 надходять луна-сигнали від цілей, які використовуються для отримання одиночних вимірів дальності R i в моменти часу t i , де 1 10 1 i1 12,...S . , У вузлі розширеного фільтра Калмана 2 здійснюється фільтрація вимірів R i з отриманням 1 рекурентних оцінок параметрів траєкторії R ,R(1) ,R( 2) у відповідності із співвідношенням для TP TP TP розширеного фільтра Калмана [1], тобто побудова траєкторії цілі на момент часу t 0 : R TP ( t ) R TP R(1) ( t t 0 ) 0,5R( 2) ( t t 0 )2 . (1) TP TP 15 Для балістичних об'єктів визначається третя похідна на основі функціональних залежностей між параметрами балістичної траєкторії [3]: R ( 3 ) 3 TP R(1) R( 2) TP TP 20 . (2) R TP Когерентна обробка пачки луна-сигналів здійснюється в вузлі оцінки радіальної швидкості 13. Для цього в блоці фазометра 14 в межах m тої когерентної пачки із T імпульсів формуються значення фази сигналів відносно фази зондуючого сигналу (чи сигналу когерентного гетеродину) i . Отримана функція фази в часі визначається параметрами руху 25 цілі (дальності R0 на момент часу t 0 , першої та другої похідних дальності R(1),R( 2) ): 2Ri 4 i 2f R0 R(1) (ti tm ) 0,5R(2) (ti tm )2 , (3) c де f - робоча частота РЛС; c - швидкість світла; , - довжина хвилі, i 12,...N. (1) Високоточна оцінка радіальної швидкості цілі, за даними когерентної обробки RKm на поточний момент часу tm , здійснюється методом кореляційної обробки отриманої функції фази i . Для цього в блоці корелятора обчислюється значення модуля кореляційного інтегралу j , як результат порівняння функцій фази i з набором із J опорних (еталонних) функцій фази з 30 відомими параметрами R (1) . OПП 1 j N 2 2 N N sin( i ОППi ) cos(i ОППi ) ; (4) i1 i1 4 , R(1) (ti tm ) 0,5R(2) Р(ti tm )2 ; j 12,...J , ТРу ОПП де R(2) - поточні оцінки радіального прискорення після уточнення в блоці 10 на m -тому ТРу Р ОППi кроці в момент часу tm . 35 (1) За первинні високоточні оцінки радіальної швидкості RKm , за даними режиму когерентної обробки, приймаються параметри тієї r -тої опорної функції, при порівнянні з якими отримується максимальне значення кореляційного інтегралу j max : (1) RKm R(1) . (5) ОПП Пошук максимуму кореляційного інтегралу 40 j здійснюється з дискретністю, яка не перевищує розмір області високої кореляції функції неузгодженості когерентної пачки імпульсів по радіальної швидкості R(1) на рівні - 3 Дб. Він дорівнює [4]: R(1) / 2TП / 2NTСЛ , (6) 2 UA 93389 U де ТП, ТСЛ - тривалість пачки імпульсів і період слідування імпульсів в пачки відповідно. Діапазон однозначного вимірювання радіальної швидкості R(1) , в режимі когерентної 0 обробки пачечного луна - сигналу, складає [4] R(1) / 2Т СЛ . (7) 0 5 Мінімальне число опорних функцій R(1) / R(1) N має місце, коли крок опорних функцій 0 дорівнює розрізнювальній спроможності пачки по радіальній швидкості R(1) . Первинні за даними режиму когерентної обробки високоточні оцінки радіальної швидкості R(1) R(1) Km ОПП формуються у блоці 16. Вони відповідають оцінкам максимального правдоподібності (ОМП) 10 (1) (RKm )ОМП R(1) при величині дискрети R(1) . ОПП Так як помилки дискретності розподілені за рівномірним законом, то середньоквадратичні відхилення (СКВ) помилки дискретності оцінки (R(1) )ОМП R(1) при величині кроку R(1) Km ОПП дорівнюють (1 D ) R(1) / 2 3 . (8) 15 (1 Отримані значення СКВ помилок дискретності D ) та сумарної (потенційна + апаратурна аналого-цифрової системи когерентної обробки пачки) СКВ оцінок вимірювань радіальної ˆ швидкості R (1) в залежності від числа імпульсів в пачці N стосовно РЛС з 2 м, Т 40 мс , зменшує (1) РЕЗ (1) 2 уточнення 20 СЛ Km помилки (1) 2 D ОМП дискретності, оскільки в даному випадку (1 за рахунок D ) збільшується приблизно в (1) (RKm )ОМП R(1) ОПП зменшення величини результуюча СКВ 2 разів. Простіший метод дискрети. На практиці використовується, як правило, крок, що дорівнює R(1) 0,5R(1) . Це дозволяє зменшити (1) РЕЗ до 112(1) . , В блоці 17 отримується оцінка максимальної правдоподібності (ОМП) методом триточкової інтерполяції max1 max1 ˆ (1) ˆ (1) , (9) (RKm )ОПІ RKm ОМП 0,5R(1) max1 2max max1 де max - значення максимуму модуля кореляційного інтегралу та двох сусідніх max1 25 ліворуч та max1 - праворуч відповідно. СКВ ОПІ при постійній СКВ вимірювань фаз i в фазометрі 14 практично не залежить i 30 (1) від положення (RKm )ОМП в межах дискрети. При 0,2 рад отримується (1) 1,1(1) , тобто РЕЗ i похибка дискретності вважається нехтовно малою надходять отримані в ході траєкторної ˆ обробки оцінки похідних дальності L , уточнені вимірами (R (1) ) за даними когерентної Km ОПІ обробки. В блоці 8 уточнюється радіальне прискорення R ( 2 ) (ступінь кривизни функції RТР чи кут ТР нахилу функції R (1) за допомогою кореляційної обробки різницевої функції: ТР ˆ (1) R(1) RKm ОПІ Km R(1) R(1) R(2) (tm t0 ) 0,5R(3) (tm t0 )2 , (10) m 0 ТР ТР ТР 35 де Km ціле число інтервалів однозначності R(1) радіальної швидкості. 0 Проводиться пошук значення R( 2) , забезпечує максимум коефіцієнта кореляції Qd . ОПmd R(1) ˆ Km ОПП R(2) , (11) exp j2 ОПmd (1) m1 R0 ˆ (1) де L - кількість вимірювань R на інтервалі спостереження за ціллю TL tL t1 (tL, t1 Km ОПІ 1 Qd L L ˆ - моменти L-того та першого вимірювань R(1) відповідно). Km ОПІ 3 UA 93389 U Крок пошуку максимуму дорівнює ( RL2) R(1) 0 2TL (12) За первинні оцінки радіального прискорення (R( 2) )ОМП приймаються параметри d-тої m опорної функції, якій відповідає максимальне значення кореляційного інтегралу Qmax max Qd : 5 ( R( 2) )ОМП R( 2) . (13) m ОППm Число опорних функцій R( 2) дорівнює ОПmd ( M R( 2) / RL2) , max де R( 2) - максимальне можливе значення радіального прискорення цілі. max В блоці 9 проводиться остаточне уточнення ОМП 10 ( R( 2) )ОМП m R( 2) . методом ОППm прискорення триточкової інтерполяції: Qmax1 Qmax1 , (14) Qmax1 2Qmax Qmax1 де Qmax - значення максимуму модуля кореляційного інтегралу та двох сусідніх: Qmax1 праворуч та Qmax1 - праворуч відповідно. ( ˆ ˆ2 ( R(2) )ОПІ Rm ОМП 0,5RL2) m 15 ˆ В блоці 10 уточнена оцінка радіального прискорення (R( 2) )ОПІ використовується для m ˆ розрахунку поправки до оцінки радіальної швидкості цілі (R (1) )ОПІ . Відповідна поправка Km розраховується за співвідношенням: L R(1) У R(1) 0 2 sin m arctg , (15) cos m 20 m1 L m1 ˆ R(1) ˆ . де m 2 Km ОПІ R( 2) m ОПІ( t m t 0 ) R(1) 0 В блоці 11 визначається кількість інтервалів однозначності Km в вимірюваннях радіальної ˆ (1) швидкості за даними режиму когерентної обробки (RKm )ОПІ для формування наступної ˆ поправки до похідних дальності R(1) та (R( 2) )ОПІ . Для цього усуваються неоднозначності m У високоточних вимірювань радіальної швидкості, отриманих за даними режиму когерентної обробки: 25 ˆ R(1) R(1) (R( 2) R( 2) m ТРm У ТРm K m E де E - ціла частина числа ; ОПІ )(t m ˆ (1) t 0 ) 0,5R(3) ( tm t 0 )2 RKm ТРm R(1) 0 ОПІ 1 , (16) 2 R (1) ; R ( 2 ) - значення оцінок похідних дальності, отриманих в ході траєкторної обробки в ТРm ТРm блоці фільтрації 3 на момент часу tm . З виходу блока усунення неоднозначності 11 на вхід блока формування уточнених оцінок 12 30 надходить значення радіальної швидкості R(1) K m R(1) . У 0 В блоці 11 визначення кількості інтервалів однозначності Km здійснюється з урахуванням вищих похідних дальності. В блоці 12 остаточно уточнюються траєкторні оцінки похідних дальності: ˆ . (17) R(1) R(1) R(1) K R(1) ; R( 2) R( 2 ) R( 2 ) ТРmУ 35 ТРm У m 0 ТРmУ ТРm m ОПІ На вихід пристрою видаються параметри траєкторії цілі, отримані в ході рекурентної фільтрації, які уточнені більш точними даними режиму когерентної обробки з підвищеної ймовірністю вірного усунення неоднозначності радіальної швидкості. Більш точні дані режиму 4 UA 93389 U 5 10 15 когерентної обробки дозволяють підвищити точність оцінки параметрів траєкторії, які отримані за результатами рекурентної фільтрації. Послідовність включення в роботу окремих блоків пристрою та їх взаємодія визначається сіткою керуючих і синхронізуючих імпульсів, які "прив'язані" до сітки частот синхронізатора PЛC (вузол синхронізації і керування на схемі пристрою не показаний). Джерела інформації: 1. Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. / Пер. с англ. - М.: Радио и связь, 1993.-С. 199. 2. Патент на корисну модель 52405, Україна, МПК G01S13/52. Пристрій фільтрації параметрів траєкторії цілі / С.В. Орєхов, С.М. Піскунов, В.В. Челпанов, Г.В. Акулінін - № 201001988; Заявл. 23.02.10, опубл. 25.08.10, Бюл. № 6. 3. Саврасов Ю.С. Алгоритмы и программы в радиолокации. - М: Радио и связь, 1985.-216с. 4. Андреев Ф.М, Статкус А.В. Потенциальные возможности корреляционной обработки пачечных когерентных радиолокационных сигналов в координатах первых трех производных дальности цели // Сб. науч. трудов 2-го Международного радиоэлектронного форума "Прикладная радиоэлектроника. Состояние и перспективы развития". - Т.2 - Харьков.-2005.-С. 147-150. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 40 Пристрій фільтрації параметрів траєкторії цілі, який містить послідовно з'єднані блок вимірювання дальності, вузол розширеного фільтра Калмана, вузол уточнення траєкторних оцінок та вузол оцінки швидкості за даними режиму когерентної обробки, який відрізняється тим, що додатково введені блок остаточного уточнення прискорення та блок остаточної оцінки радіальної швидкості, вузол розширеного фільтра Калмана у складі послідовно з'єднаного блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення і блока екстраполяції, вузол уточнення траєкторних оцінок, який містить послідовно з'єднані блок уточнення прискорення, блок уточнення швидкості, блок усунення неоднозначності і блок формування уточнених оцінок, вузол оцінки швидкості за даними режиму когерентної обробки у складі послідовно з'єднаних блока фазометра, блока корелятора, блока оцінки радіальної швидкості і блока остаточної оцінки радіальної швидкості, причому вихід блока вимірювання дальності з'єднаний з входом блока фільтрації, виходи блоків визначення коефіцієнта підсилення і екстраполяції додатково з'єднані відповідно з другим і третім входами блока фільтрації, вихід блока фільтрації з'єднаний з першим входом блока уточнення прискорення та третіми входами блока усунення неоднозначності і блока формування уточнених оцінок, вихід блока остаточної оцінки радіальної швидкості з'єднаний з другими входами блока усунення неоднозначності і блока уточнення прискорення, вихід блока остаточного уточнення прискорення додатково з'єднаний з четвертим входом блока усунення неоднозначності та другим входом блока формування уточнених оцінок, другий вихід блока уточнення швидкості з'єднаний з другим входом блока корелятора, при цьому входом пристрою є входи блоків вимірювання дальності та фазометра, а виходом - вихід блока формування уточнених оцінок. 5 UA 93389 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюChelpanov Artem Volodymyrovych, Melenti Yevhen Oleksandrovych, Rybalka Hryhorii Valeriiovych
Автори російськоюЧелпанов Артем Владимирович, Меленти Евгений Александрович, Рыбалка Григорий Валериевич
МПК / Мітки
МПК: G01S 13/52
Мітки: параметрів, фільтрації, пристрій, траєкторії, цілі
Код посилання
<a href="https://ua.patents.su/8-93389-pristrijj-filtraci-parametriv-traehktori-cili.html" target="_blank" rel="follow" title="База патентів України">Пристрій фільтрації параметрів траєкторії цілі</a>
Пристрій фільтрації параметрів траєкторії цілі

Номер патенту: 52405
Опубліковано: 25.08.2010
Автори: Піскунов Станіслав Миколайович, Акулінін Гліб Васильович, Челпанов Володимир Валентинович, Орєхов Сергій Васильович
МПК: G01S 13/52
Мітки: пристрій, фільтрації, параметрів, цілі, траєкторії
Формула / Реферат:
Пристрій фільтрації параметрів траєкторії цілі, що містить послідовно з'єднані блок вимірювання дальності і вузол розширеного фільтра Калмана у складі послідовно з'єднаних блока фільтрації, блока лінеаризації, блока визначення коефіцієнта підсилення і блока екстраполяції, який відрізняється тим, що додатково введені вузол уточнення траєкторних оцінок у складі послідовно з'єднаних блока усунення неоднозначності, блока уточнення прискорення,...
Пристрій фільтрації параметрів траєкторії цілі
Номер патенту: 12818
Опубліковано: 15.03.2006
Автори: Коваль Олександр Андрійович, Петрушенко Микола Миколайович, Карлов Володимир Дмитрович, Квіткін Костянтин Петрович, Челпанов Артем Володимирович, Луковський Олег Ярославович
МПК: G01S 13/52
Мітки: фільтрації, параметрів, траєкторії, цілі, пристрій
Формула / Реферат:
Пристрій фільтрації параметрів траєкторії цілі, що містить лінійний фільтр Калмана, N паралельно включених узгоджених фільтрів, блок вибору максимуму і блок порівняння з порогом, який відрізняється тим, що додатково введений другий фільтр Калмана, блок аналізу динамічних помилок, блок аналізу оцінок і блок комутатора, причому перший вихід першого фільтра Калмана з'єднаний із входом блока аналізу динамічних помилок, другий вихід - із входом...
Пристрій рекурентної фільтрації параметрів траєкторії цілі
Номер патенту: 50281
Опубліковано: 25.05.2010
Автори: Челпанов Артем Володимирович, Смоляков Денис Олександрович, Ворошилов Сергій Вікторович, Піскунов Станіслав Миколайович
МПК: G01S 13/52
Мітки: фільтрації, пристрій, рекурентної, траєкторії, цілі, параметрів
Формула / Реферат:
Пристрій рекурентної фільтрації параметрів траєкторії цілі, який містить фільтр Калмана у складі послідовно з'єднаних блока фільтрації, блока екстраполяції і визначення кореляційної матриці помилок (КМП) та блока визначення коефіцієнта підсилення, який відрізняється тим, що додатково введено вузол визначення характеристик помилок та корекції КМП у складі послідовно з'єднаних блока визначення характеристик корельованих помилок, блока...
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі

Номер патенту: 19892
Опубліковано: 15.01.2007
Автори: Петрушенко Микола Миколайович, Челпанов Артем Володимирович, Луковський Олег Ярославович, Квіткін Костянтин Петрович, Гаврілкін Володимир Вільевич, Карлов Володимир Дмитрович
МПК: G01S 13/52
Мітки: маневруючої, цілі, адаптивний, параметрів, траєкторії, фільтрації, пристрій
Формула / Реферат:
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі, що містить фільтр Калмана 2-го порядку, фільтр Калмана 3-го порядку і комутатор, який відрізняється тим, що додатково введені блок формування вибірки, блок корегування кореляційної матриці помилок (КМП) вимірювань у складі послідовно з'єднаних першого блока оцінювання середнього, першого блока оцінювання КМП фільтрації і блока розрахунку КМП вимірювань, блок виявлення і...
Адаптивний фільтр оцінки параметрів траєкторії цілі
Номер патенту: 48843
Опубліковано: 15.08.2002
Автори: Челпанов Артем Володимирович, Савченко Микола Павлович, Карлов Володимир Дмитрович, Фик Олександр Ілліч
МПК: G01S 13/52, G01S 13/00
Мітки: оцінки, фільтр, параметрів, цілі, адаптивний, траєкторії
Формула / Реферат:
Адаптивний фільтр оцінки параметрів траєкторії цілі, що містить блок обчислення кореляційної матриці помилок, послідовно з'єднані блок обчислення оцінок параметрів, пристрій що запам'ятовує та блок екстраполяції параметрів, який відрізняється тим, що додатково введено блок фазометра і вузол оцінки швидкості та прискорення у складі послідовно з'єднаних блоків генератора опорних функцій, блоку вирахування, корелятора і блоку формування оцінок,...
Попередній патент: Спосіб лікування хворих на інфільтративний туберкульоз у поєднанні з хронічним бронхітом
Наступний патент: Пристрій для розвантажування коксу з коксової рампи
Випадковий патент: Процес виготовлення вуглеводневих продуктів