Багатокоординатний двосторонній модульний електропривод аерокосмічних тренажерних систем
Номер патенту: 104273
Опубліковано: 10.01.2014
Автори: Васильєв Валерій Валентинович, Яглінський Віктор Петрович, Фелько Микола В'ячеславович, Ковалішин Сергій Семенович, Беліков Віктор Тріфонович


Формула / Реферат
1. Багатокоординатний модульний електропривод аерокосмічних тренажерних систем, що складається з двокоординатного функціонального блока-модуля з паралельним кінематичним механізмом гексаподного типу, що має шість ступенів свободи, причому двокоординатний функціональний блок-модуль виконаний у вигляді кінематичного об'єднання двох пар взаємно перпендикулярних однокоординатних форсованих лінійних широкорегульованих електричних приводів з високою перевантажувальною здатністю, плоскі шляхові структури яких попарно паралельно встановлені уздовж кожної з чотирьох меж обслуговуваної прямокутної координатної площини та активні рухомі блоки-модулі яких жорстко закріплені на взаємно перпендикулярних направляючих координатних стрижнях, що знаходяться в паралельних площинах, який відрізняється тим, що виконаний двостороннім з утворенням двох двокоординатних лінійних приводів, причому кожен однокоординатний форсований лінійний широкорегульований електричний привод містить по два активні рухомі блоки-модулі, які розміщені з можливістю подовжнього переміщення по обидві сторони загальної плоскої шляхової структури і механічно зв'язані замкнутою металевою або композитною стрічкою або замкнутим тросом, при цьому кожен двокоординатний лінійний привід оснащений гексаподним механізмом, площадка-основа якого несе опорні вузли кочення, в яких встановлені направляючі координатні стрижні.
2. Багатокоординатний модульний електропривод аерокосмічних тренажерних систем за п. 1, який відрізняється тим, що його двокоординатний функціональний блок-модуль встановлений у вертикальній площині на опорних елементах анкерного типу, жорстко прикріплених до горизонтальних або вертикальних елементів каркаса тренажерних приміщень.
3. Багатокоординатний модульний електропривод аерокосмічних тренажерних систем за п. 1 або п. 2, який відрізняється тим, що його двокоординатний функціональний блок-модуль встановлений на вертикальних анкерних опорах з можливістю повороту навколо своєї горизонтальної осі за допомогою одного або двох серводвигунів обертального типу.
4. Багатокоординатний модульний електропривод аерокосмічних тренажерних систем за будь-яким із пп. 1-3, який відрізняється тим, що між горизонтальними площадками, що розміщені на взаємно перпендикулярних направляючих координатних стрижнях двокоординатного функціонального блока-модуля, і основами гексаподних механізмів встановлені плоскі торцеві електричні двигуни прямого приводу.
5. Багатокоординатний модульний електропривод аерокосмічних тренажерних систем за будь-яким із пп. 1-4, який відрізняється тим, що площадки гексаподів, що несуть кабіни тренованих операторів, оснащені плоскими торцевими електричними двигунами прямого приводу.
Текст
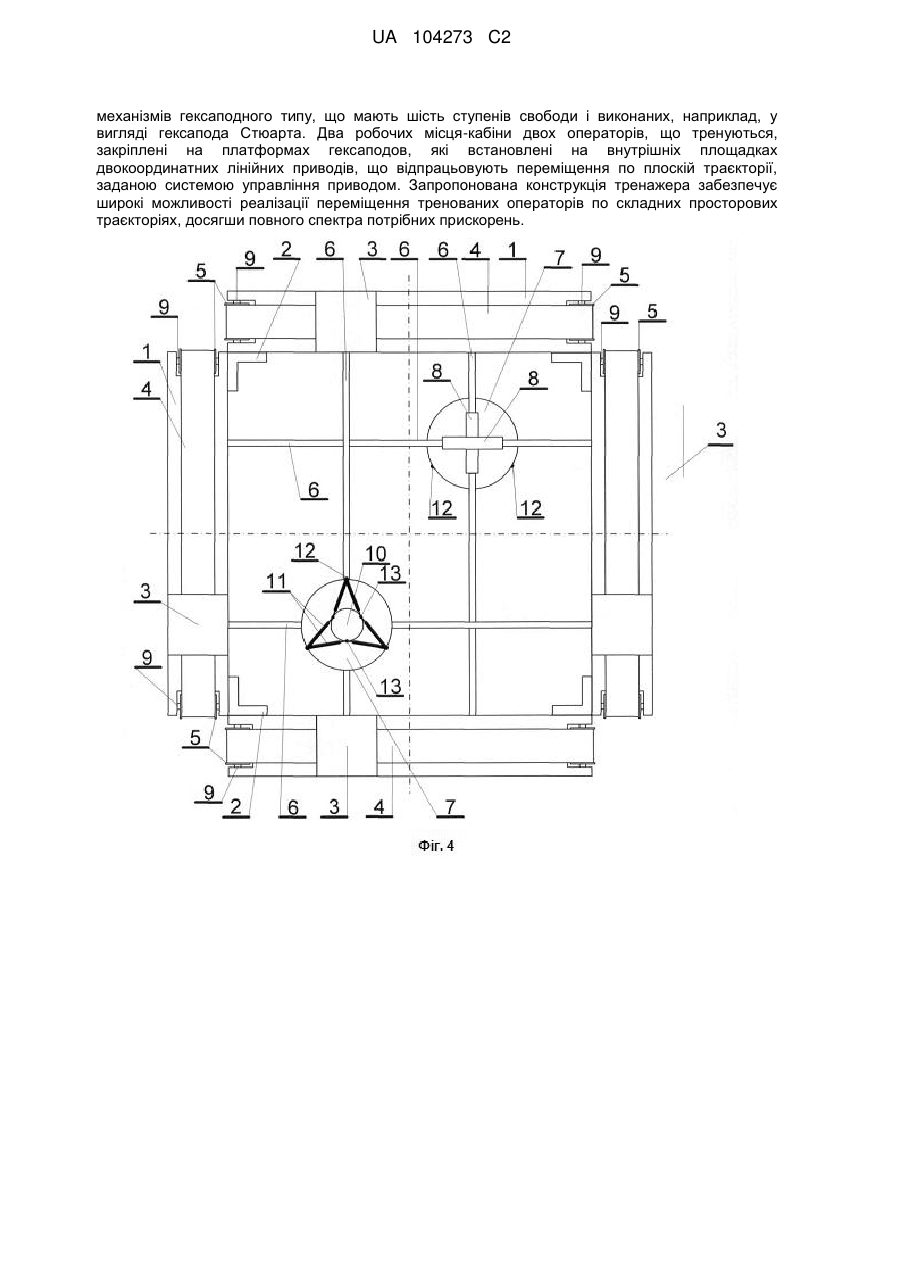
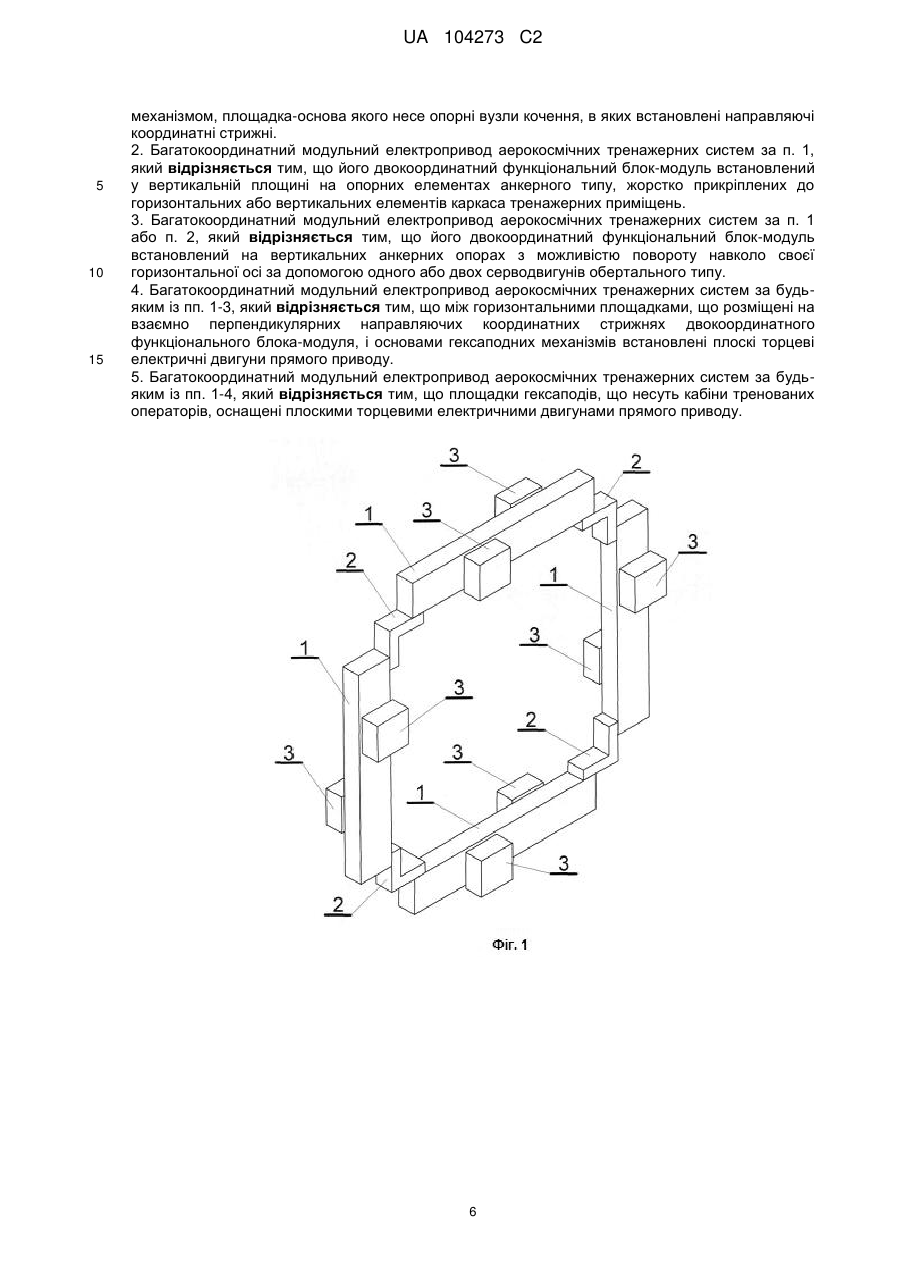
Реферат: Винахід належить до тренажерних механізмів і комплексів, що використовуються для підготовки операторів аерокосмічних військових транспортних систем і призначені для вироблення у них стійких динамічних стереотипів управління сучасними повітряними і космічними військовими транспортними установками. Кінематична схема багатокоординатного тренажера, який запропоновано, заснована на об'єднанні вертикально розміщеного двостороннього лінійного двокоординатного функціонального блока-модуля з парою паралельних кінематичних UA 104273 C2 (12) UA 104273 C2 механізмів гексаподного типу, що мають шість ступенів свободи і виконаних, наприклад, у вигляді гексапода Стюарта. Два робочих місця-кабіни двох операторів, що тренуються, закріплені на платформах гексаподов, які встановлені на внутрішніх площадках двокоординатних лінійних приводів, що відпрацьовують переміщення по плоскій траєкторії, заданою системою управління приводом. Запропонована конструкція тренажера забезпечує широкі можливості реалізації переміщення тренованих операторів по складних просторових траєкторіях, досягши повного спектра потрібних прискорень. UA 104273 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до області військової техніки, а саме до багатокоординатних електричних приводів спеціалізованих аерокосмічних тренажерних систем, призначених для індивідуального і групового тренування операторів військової авіаційної і космічної техніки з метою вироблення у них стійких навиків управління цією технікою при постійній дії на оператора різноспрямованих динамічних зусиль. Перспективною галуззю застосування багатокоординатного двостороннього модульного електроприводу аерокосмічних тренажерних систем, який запропоновано, є тренажерні механізми і комплекси, що використовуються для такої підготовки операторів військової транспортної техніки, включаючи армійську авіацію сухопутних військ, яка повинна гарантувати вироблення у них стійких динамічних стереотипів управління сучасними військовими аерокосмічними і авіаційними бойовими системами у складних фізико-географічних і кліматичних умовах. Відомі і достатньо часто використовуються у вітчизняній і зарубіжній практиці тренажери операторів наземної, морської і повітряної транспортної техніки, розроблені на основі багатокоординатних кінематичних механізмів, що мають так звану паралельну структуру. Докладний аналіз цих багатокоординатних кінематичних механізмів на високому теоретичному і практичному рівні представлений в монографії російського професора І.Н.Єгорова "Позиционно-силовое управление робототехническими и мехатронними устройствами" [Владимир: Видавництво ВГУ, 2010.-192 c.]. Одним з найбільш характерних і широко поширених в тренажерній техніці кінематичних механізмів вказаного вище типу є платформа Стюарта (див. вказану вище монографію проф. Єгорова І.Н., с. 14-17), гексапод, що має шість ступенів свободи. На верхній платформі гексапода встановлено робоче місце-кабіну оператора аерокосмічних тренажерних систем, який повинен тренуватися. Як прототип багатокоординатного двостороннього модульного електропривода аерокосмічних тренажерних систем, що запропоновано, прийнятий винахід під назвою: "Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами» за заявкою № а 2012 00487 від 16.01.2012р (співавтори Фелько М.В., Гончарук А.А., Коваль А.А., Ярмолюк В.М., Беліков В.Т., Васильєв В.В.), по якому рішення за №18530/3А/13 про видачу патенту було прийнято 01.08.2013 р. Тренажер-прототип, який було призначено для підготовки операторів військової транспортної техніки, має головний модульний електромеханічний привод, що складається з двокоординатного функціонального блока-модуля, що є кінематичним об'єднанням двох пар взаємно перпендикулярних однокоординатних лінійних широкорегульованих електричних приводів з високою перевантажувальною здатністю. Прямолінійні шляхові структури вказаних приводів попарно паралельно встановлені уздовж кожної з чотирьох меж обслуговуваної прямокутної координатної площини. Активні рухомі блоки-модулі координатних лінійних електричних двигунів симетрично розміщені один проти одного жорстко і закріплені на взаємно перпендикулярних направляючих координатних стрижнях, що знаходяться в паралельних площинах, причому двокоординатний функціональний блок-модуль забезпечений горизонтальною площадкою довільної форми, що розміщена усередині координатної площини і несе дві пари опор кочення, в яких з можливістю вільного переміщення проходять направляючі координатні стрижні. Платформу-основу паралельного кінематичного механізму гексаподного типу з шістьма ступенями свободи жорстко закріплено на верхній площині горизонтальної площадки двокоординатного функціонального блока-модуля. Кабіна оператора, що тренується, встановлена на верхній площадці гексаподу. Він має ряд недоліків, що обмежують сферу його практичного застосування. Так, у механізмах з паралельною структурою, до яких належить платформа Стюарта, унаслідок наявності сил і моментів сил тертя в кінематичних парах з'являється небезпека заклинювання механізму поблизу особливих положень. Проте найсерйознішим недоліком гексаподних механізмів є наявність принципових кінематичних обмежень величин лінійних переміщень оператора в горизонтальних площинах, паралельних площині основи тренажера. Це пов'язано з тим, що збільшення довжин його шести опор в процесі роботи гексапода приводить до різкої втрати стійкості всього механізму в цілому. Остання обставина значно знижує функціональність тренажера-прототипу, кінематика якого заснована виключно на використанні механізмів гексаподного типу. Задачею усунення вказаних вище недоліків прототипу вирішене в багатокоординатному двосторонньому модульному електроприводу аерокосмічних тренажерних систем, що запропоновано, таким чином. 1 UA 104273 C2 5 10 15 20 25 30 35 40 45 50 55 60 Багатокоординатний двосторонній модульний електропривод аерокосмічних тренажерних систем запропоновано виконати на основі двокоординатного функціонального блока-модуля, що є кінематичним об'єднанням двох пар взаємно перпендикулярних однокоординатних форсованих лінійних широкорегульованих електричних приводів з високою перевантажувальною здатністю, прямолінійні шляхові структури яких попарно паралельно встановлені уздовж кожної з чотирьох меж обслуговуваної прямокутної координатної площини. При цьому симетрично розміщені один проти одного комплекти активних рухомих блоківмодулів координатних лінійних електричних двигунів повинні бути жорстко закріплені на взаємно перпендикулярних направляючих координатних стрижнях, що знаходяться в паралельних площинах. Кожен з однокоординатних лінійних широкорегульованих приводів, що створюють пару, складається з двох активних рухомих елементів, які розміщені з можливістю повздовжнього переміщення по обидві сторони загальної плоскої лінійної шляхової структури. Вказані активні рухомі елементи механічно зв'язані замкнутою металевою або композитною стрічкою або замкнутим тросом, що забезпечує повне взаємне механічне урівноваження кожного з приводів в процесі довільного просторового переміщення двокоординатного функціонального блока-модуля, що є основою пропонованого багатокоординатного двостороннього модульного електроприводу аерокосмічних тренажерних систем, який запропоновано. Нижні основи двох паралельних кінематичних механізмів гексаподного типу, кожен з яких має шість ступенів свободи, жорстко закріплені на координатних площадках двокоординатного функціонального блока-модуля, що відпрацьовують задані системою управління приводом переміщення по плоских траєкторіях. Кабіни для розміщення операторів військової аерокосмічної техніки, які тренуються, встановлені на верхніх площадках гексаподних механізмів. Основу багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем може бути нерухомо встановлено у вертикальній площині на вертикальних або горизонтальних анкерних опорах портального типу. Запропоновано збільшити функціональні можливості цього багатокоординатного двостороннього модульного електроприводу аерокосмічних тренажерних систем на основі установки на вертикальних або горизонтальних опорах портального типу одного або двох серводвигунів обертального типу для реалізації повороту і обертання двокоординатного функціонального блока-модуля навколо своєї горизонтальної осі за допомогою одного або двох серводвигунів обертального типу. З метою подальшого розширення області функціональних можливостей багатокоординатного двостороннього модульного електроприводу аерокосмічних тренажерних систем запропоновано застосувати систему прямого, безпосереднього приводу обертання основ гексаподних механізмів, закріплених на рухомих площадках його двокоординатного функціонального блока-модуля, і кабін операторів аерокосмічної техніки, що тренуються, на основі торцевих електричних двигунів обертального типу. Очевидно, що в першому випадку торцеві привідні електродвигуни прямого приводу повинні бути закріплені на рухомих площадках двокоординатного приводу, а в другому випадку, - на верхніх площадках гексаподних механізмів. На кресленнях, що ілюструють конструктивну суть пропонованого багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем, представлені: Фіг. 1 Компонувальна конструктивна схема просторового розташування елементів функціонального блока-модуля двостороннього двокоординатного лінійного електродвигуна, аксонометрична проекція; Фіг. 2 Компонувальна конструктивна схема розміщення опорних барабанів плоскої сполучної стрічки щодо шляхової структури кожного з двосторонніх координатних лінійних функціональних блоків-модулів двокоординатного приводу, аксонометрична проекція; Фіг. 3 Компонувальна конструктивна схема закріплення плоскої гнучкої сполучної стрічки на корпусах активних рухомих елементів кожного з двосторонніх координатних лінійних функціональних блоків-модулів двокоординатного приводу, аксонометрична проекція; Фіг. 4 Конструктивна схема багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем, вигляд спереду; Фіг. 5 Конструктивна схема багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем, вигляд ззаду; Фіг. 6 Конструктивна схема багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем, вигляд збоку; 2 UA 104273 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 7 Конструктивна схема багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем, вигляд зверху; Фіг. 8 Конструктивна схема вертикального багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем, аксонометрична проекція передньої половини; Фіг. 9 Конструктивна схема вертикального багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем, аксонометрична проекція з виглядом задньої половини; Фіг. 10 Конструктивна схема багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем з анкерним портальним кріпленням двокоординатного приводу на нижній горизонтальній площині приміщення тренувального комплексу, аксонометрична проекція; Фіг. 11 Конструктивна схема багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем з анкерним портальним кріпленням двокоординатного приводу на бічній вертикальній площині (стіні) приміщення тренувального комплексу, аксонометрична проекція; Фіг. 12 Конструктивна схема багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем з анкерним портальним кріпленням двокоординатного приводу на нижній горизонтальній площині тренувального комплексу і сервоприводом повороту і обертання двокоординатного приводу, аксонометрична проекція; Фіг. 13 Конструктивна схема установки кабіни оператора на верхній площадці гексаподного механізму, закріпленого на верхній рухомій площадці двокоординатного функціонального блокумодуля, вид збоку; Фіг. 14 Конструктивна схема установки кабіни оператора на верхній площадці гексаподного механізму, закріпленого на нижній рухомій площадці двокоординатного функціонального блокумодуля, вид збоку; Фіг. 15 Конструктивна схема установки торцевих електродвигунів прямого приводу поворотів нижньої основи гексаподного механізму і кабіни оператора тренажера, відповідна верхній рухомій площадці двокоординатного функціонального блоку-модуля, вид збоку; Фіг. 16 Конструктивна схема установки торцевих електродвигунів прямого приводу поворотів нижньої основи гексаподного механізму і кабіни оператора тренажера, відповідна нижній рухомій площадці двокоординатного функціонального блоку-модуля, вид збоку. Фіг. 17 Зразок дизайнерського розроблення конструктивної схеми багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем з анкерним портальним кріпленням двокоординатного приводу на нижній горизонтальній площині тренувального комплексу і сервоприводом повороту і обертання двокоординатного приводу. На фігурах 1, 2 і 3 у вигляді аксонометричних проекцій представлені компонувальні конструктивні схеми складових елементів функціонального блока-модуля двостороннього двокоординатного приводного лінійного електричного двигуна, що є основним елементом багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем, що запропоновано. Чотири його пасивних нерухомих плоских шляхових структури 1 об'єднані в загальний жорсткий вертикально розміщений прямокутний каркас за допомогою кутових монтажних елементів 2. Вісім рухомих активних елементів 3 вказаних двосторонніх лінійних приводних електродвигунів, які попарно з можливістю подовжнього переміщення на опорах кочення, на фіг. 1, 2 і 3 не показаних, встановлені по обидві сторони кожної з нерухомих плоских шляхових структур 1, сполучені один з одним за допомогою гнучкої гладкої металевої або гладкої, або зубчатої композитної стрічки 4. З цією метою на кожній шляховий структурі 1 встановлена пара циліндрових гладких або зубчатих шківів 5, вали яких закріплені на обох кінцях шляхової структури 1 і забезпечені опорами кочення. Останні на фіг. 1, 2 і 3 також не показані. Гнучкі стрічки 4, які сполучають активні елементи 3, що переміщаються уздовж площин шляхових структур 1 двокоординатного приводного електродвигуна, які протилежать, можуть бути замінені гнучкими тонкими тросами, що спираються на вузькі шківи з кільцевими канавками для фіксації тросів. Запропоноване в справжній заявці на видачу патенту попарне механічне об'єднання рухомих елементів 3 одних і тих же шляхових структури 1 за допомогою гнучких смуг або тросів 4 в кожному з чотирьох лінійних приводів, що складають конструктив основи багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних 3 UA 104273 C2 5 10 15 20 25 30 35 40 45 50 55 60 тренажерних систем, забезпечує повне взаємне механічне урівноваження кожного блокамодуля з приводів в процесі довільного переміщення двокоординатного функціонального основи в просторі. На фігурах 4, 5, 6 і 7 представлений необхідний для опису кінематики набір проекцій загального виду конструктивної схеми багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем, який запропоновано. Кожна з двох пар активних рухомих координатних блоків-модулів 3, розміщених в одній площині відносно зібраного в жорсткий конструктив за допомогою кутових монтажних елементів 2 прямокутного комплекту нерухомих шляхових структур 1, сполучена жорсткими координатними стрижнями 6. Взаємно перпендикулярні жорсткі стрижні 6 координатних напрямів X і Y розміщені в паралельних площинах. Кожен з двох паралельних плоских координатних площадок 7, що відпрацьовують задане системою управління переміщення в координатній площині X-Y, забезпечена вузлом жорстко зв'язаних пар взаємно перпендикулярних лінійних опор кочення 8, відповідних кожному з жорстких стрижнів 6. На кінцевих ділянках кожної з чотирьох шляхових структур 1 на валах 9 встановлені циліндрові гладкі або зубчаті шківи 5, що служать опорами тонких гнучких металевих або композитних стрічок 4, які використовуються для з'єднання рухомих активних координатних блоків-модулів 3. Очевидно, що завдяки вказаним сполучним стрічкам 4 досягнуте повне урівноваження мас рухомих блоків-модулів 3. Остання обставина особливо важлива при вертикальному розташуванні багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем. Пара плоских координатних площадок 7, розміщених на протилежних сторонах двокоординатного приводу і таких, що відпрацьовують сумарний рух по заданих плоских траєкторіях, використана в пропонованому багатокоординатному комбінованому двосторонньому модульному електроприводі аерокосмічних тренажерних систем як основа для установки пари шестиступеневих гексаподних механізмів Стюарта. Кожна з двох пар плоских площадок 10 гексаподних механізмів Стюарта сполучена з площадкою-основою 7 гексапода за допомогою шести жорстких стрижнів-механізмів 11 регульованої довжини. Вказані стрижнімеханізми 11 можуть бути виконані у вигляді гідроприводів, циліндрових лінійних електричних двигунів або електроприводів, що обертаються, з прецизійними механічними передачами типу "гвинт - гайка кочення". Обидва кінці кожного із стрижнів-механізмів 11 пов'язані з опорними площадками 7 і 10 кожного з пари гексаподних механізмів за допомогою шарнірних з'єднань 12 і 13, відповідно. Очевидно, що з метою повного взаємного урівноваження гексаподних механізмів Стюарта вони повинні бути повністю ідентичними за масогабаритними показниками. На фігурах 8 і 9 в аксонометричних проекціях представлені конструктивні схеми передньої і задньої половин вертикального багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем. Очевидно, що конструктивні схеми, приведені на фігурах 8 і 9, дають більш наочне уявлення про основи взаємодії складових елементів пропонованого модульного приводу аерокосмічних тренажерних систем. На фіг. 10 в аксонометричній проекції показана конструктивна схема запропонованого багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем з анкерним портальним кріпленням двокоординатного приводу на нижній горизонтальній площині (підлозі) приміщення тренувального комплексу. Вертикальні стійки 14 опор порталу жорстко закріплено в анкерах 15, встановлених в горизонтальній площині (підлозі) тренувального комплексу, яка у вигляді окремої позиції на фіг. 10 не позначена. Бічні вертикальні шляхові структури 1 двокоординатного приводу жорстко прикріплені до горизонтальних частин 16 портальних стійок 14 за допомогою регулювальних монтажних елементів 17. На фіг. 11 в аксонометричній проекції показана конструктивна схема запропонованого багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем з анкерним портальним кріпленням двокоординатного приводу до бічної вертикальної площини (стіни) приміщення тренувального комплексу. Тут горизонтальні стійки 18 порталу так само, як і у попередньому випадку, жорстко закріплені в анкерах 19 встановлених у вертикальній площині (стіні) тренувального комплексу, яка у вигляді окремої позиції на фіг. 11 не позначена. Бічні вертикальні шляхові структури 1 двокоординатного приводу жорстко прикріплені до горизонтальних частин 20 портальних стійок 18 за допомогою регулювальних монтажних елементів 17. На фіг. 12 у вигляді аксонометричної проекції представлена конструктивна схема багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем з анкерним портальним кріпленням двокоординатного приводу до нижньої горизонтальної площини (підлоги) тренувального комплексу і сервоприводом повороту і 4 UA 104273 C2 5 10 15 20 25 30 35 40 обертання двокоординатного приводу. У цьому технічному рішенні підвищення рівня функціональних можливостей запропонованого багатокоординатного приводу тренажерів досягнуте завдяки установці на торцях горизонтальних частин 16 вертикальних портальних стійок 14 одного або пари серводвигунів 21, вали яких приводять в рух регулювальні монтажні елементи 17, жорстко пов'язані з вертикальними шляховими структурами 1. Таким чином, двокоординатне переміщення рухомих площадок 7 з гексаподами доповнено поворотами і обертаннями двокоординатного блоку-модуля, що значно розширює спектр переміщень тренованого оператора в просторі. На фігурах 13 і 14 у вигляді збоку представлені конструктивні схеми установки кабін 22 операторів на верхніх площадках гексаподних механізмів, встановлених як на верхній рухомій площадці 7 двокоординатного функціонального блоку-модуля, так і на його нижній рухомої площадці. Жорсткі стрижні 6 знаходяться в опорах кочення 23, розміщених в корпусах 8. На фігурах 15 і 16 у вигляді збоку представлені конструктивні схеми установки торцевих електродвигунів 24 і 25 прямого приводу поворотів нижньої основи гексаподного механізму і кабіни оператора тренажера, які відповідають верхній і нижній рухомим площадкам двокоординатного функціонального блоку-модуля. На фіг. 17 представлений зразок дизайнерського розроблення конструктивної схеми багатокоординатного комбінованого двостороннього модульного електроприводу аерокосмічних тренажерних систем з анкерним портальним кріпленням рами двокоординатного приводу з шляхових структур 1 на нижній горизонтальній площині тренувального комплексу з допомогою вертикальних стояків 14 і анкерів 15. Сервопривод повороту і обертання двокоординатного приводу, який має активні елементи 3, виконаний з допомогою електродвигунів 21 прямого приводу. Кабіна 22 з оператором, що тренується, закріплена на верхній платформі гексапода Стюарта. Багатокоординатний двосторонній модульний електропривод аерокосмічних тренажерних систем, що запропоновано, працює таким чином. Перед початком навчання операторів аерокосмічного устаткування на тренажері, обладнаному описаним вище багатокоординатним двостороннім модульним електроприводом, теоретично підготовлений до тренування на такому тренажері оператор (оператори) самостійно або за допомогою інструктора повинен бути розміщений на робочому місці в одній з двох кабін 22 тренажера. Далі інструктор-керівник тренувального процесу вводить в комп'ютер програму навчання, яка відповідає порядку проведення конкретних технологічних циклів реальним агрегатом аерокосмічного комплексу, після чого подається пусковий імпульс на систему управління комплексом електричних приводів тренажера. З моменту початку просторових переміщень кабіни 22 тренажеру з оператором, що тренується, останній за допомогою наявних в кабіні 22 засобів управління, повністю аналогічних тому виду аерокосмічного устаткування, яке буде згодом включено в зону його відповідальності, починає керувати механізмами багатокоординатного модульного приводу відповідно до програми тренування. Після закінчення кожного тренувального сеансу, у разі потреби, повинна бути проведена відповідна переналадка систем управління тренажера операторів аерокосмічної техніки, який забезпечений запропонованим багатокоординатним двостороннім модульним електроприводом аерокосмічних тренажерних систем ФОРМУЛА ВИНАХОДУ 45 50 55 60 1. Багатокоординатний модульний електропривод аерокосмічних тренажерних систем, що складається з двокоординатного функціонального блока-модуля з паралельним кінематичним механізмом гексаподного типу, що має шість ступенів свободи, причому двокоординатний функціональний блок-модуль виконаний у вигляді кінематичного об'єднання двох пар взаємно перпендикулярних однокоординатних форсованих лінійних широкорегульованих електричних приводів з високою перевантажувальною здатністю, плоскі шляхові структури яких попарно паралельно встановлені уздовж кожної з чотирьох меж обслуговуваної прямокутної координатної площини та активні рухомі блоки-модулі яких жорстко закріплені на взаємно перпендикулярних направляючих координатних стрижнях, що знаходяться в паралельних площинах, який відрізняється тим, що виконаний двостороннім з утворенням двох двокоординатних лінійних приводів, причому кожен однокоординатний форсований лінійний широкорегульований електричний привод містить по два активні рухомі блоки-модулі, які розміщені з можливістю подовжнього переміщення по обидві сторони загальної плоскої шляхової структури і механічно зв'язані замкнутою металевою або композитною стрічкою або замкнутим тросом, при цьому кожен двокоординатний лінійний привід оснащений гексаподним 5 UA 104273 C2 5 10 15 механізмом, площадка-основа якого несе опорні вузли кочення, в яких встановлені направляючі координатні стрижні. 2. Багатокоординатний модульний електропривод аерокосмічних тренажерних систем за п. 1, який відрізняється тим, що його двокоординатний функціональний блок-модуль встановлений у вертикальній площині на опорних елементах анкерного типу, жорстко прикріплених до горизонтальних або вертикальних елементів каркаса тренажерних приміщень. 3. Багатокоординатний модульний електропривод аерокосмічних тренажерних систем за п. 1 або п. 2, який відрізняється тим, що його двокоординатний функціональний блок-модуль встановлений на вертикальних анкерних опорах з можливістю повороту навколо своєї горизонтальної осі за допомогою одного або двох серводвигунів обертального типу. 4. Багатокоординатний модульний електропривод аерокосмічних тренажерних систем за будьяким із пп. 1-3, який відрізняється тим, що між горизонтальними площадками, що розміщені на взаємно перпендикулярних направляючих координатних стрижнях двокоординатного функціонального блока-модуля, і основами гексаподних механізмів встановлені плоскі торцеві електричні двигуни прямого приводу. 5. Багатокоординатний модульний електропривод аерокосмічних тренажерних систем за будьяким із пп. 1-4, який відрізняється тим, що площадки гексаподів, що несуть кабіни тренованих операторів, оснащені плоскими торцевими електричними двигунами прямого приводу. 6 UA 104273 C2 7 UA 104273 C2 8 UA 104273 C2 9 UA 104273 C2 10 UA 104273 C2 11 UA 104273 C2 12 UA 104273 C2 13 UA 104273 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 14
ДивитисяДодаткова інформація
Автори англійськоюBelikov Viktor Tryfonovych, Vasyliev Valerii Valentynovych
Автори російськоюБеликов Виктор Трифонович, Васильев Валерий Валентинович
МПК / Мітки
МПК: F41G 3/26, F41A 33/00, A63B 24/00, G09B 9/52, G09B 9/10
Мітки: електропривод, двосторонній, аерокосмічних, систем, тренажерних, модульний, багатокоординатний
Код посилання
<a href="https://ua.patents.su/16-104273-bagatokoordinatnijj-dvostoronnijj-modulnijj-elektroprivod-aerokosmichnikh-trenazhernikh-sistem.html" target="_blank" rel="follow" title="База патентів України">Багатокоординатний двосторонній модульний електропривод аерокосмічних тренажерних систем</a>
Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами
Номер патенту: 103250
Опубліковано: 25.09.2013
Автори: Коваль Андрій Андрійович, Беліков Віктор Тріфонович, Васильєв Валерій Валентинович, Ярмолюк Вадим Михайлович, Фелько Микола В'ячеславович, Гончарук Антон Антонович
МПК: H02K 41/00, F41A 33/00, F41G 5/00, F41G 3/26, A63B 24/00
Мітки: багатокоординатний, транспортної, приводами, техніки, комбінований, військової, тренажер, модульними, операторів, електромеханічними
Формула / Реферат:
1. Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами, що складається з двокоординатного функціонального блока-модуля з паралельним кінематичним механізмом гексаподного типу, що має шість ступенів свободи, при якому нижня основа має жорсткий механічний зв'язок з центральним рухомим елементом двокоординатного електромеханічного приводу, робоче місце тренованого...
Модульний комбінований осьовий інструмент
Номер патенту: 49356
Опубліковано: 26.04.2010
Автори: Карпусь Владислав Євгенович, Іванова Марина Сергіївна
МПК: B23B 51/00
Мітки: модульний, комбінований, осьовий, інструмент
Формула / Реферат:
Модульний комбінований осьовий інструмент, що складається з осьового модуля та закріпленого на ньому кільцевого модуля, який відрізняється тим, що хвостова частина осьового модуля має зовнішню різьбу, а кільцевого модуля має внутрішню різьбу.
Спосіб оцінювання параметрів руху зварювальної дуги в дугових тренажерних системах
Номер патенту: 86909
Опубліковано: 25.05.2009
Автори: Чередник Анатолій Дмитрович, Гавва Віктор Маркович, Патон Борис Євгенович, Коротинський Олександр Євтихієвич, Буряк Владислав Юрійович, Богдановський Валентин Олександрович, Махлін Наум Мордухович
МПК: B23K 9/10, G09B 19/24
Мітки: зварювальної, системах, параметрів, дугових, спосіб, руху, тренажерних, дуги, оцінювання
Формула / Реферат:
Спосіб оцінювання параметрів руху зварювальної дуги в дугових тренажерних системах, при якому швидкість зварювання визначають шляхом вимірювання довжини шляху зварювальної дуги за обраний інтервал часу при її переміщенні уздовж зварювального зразку, виконаного у вигляді однорідної електропровідної пластини з незмінною по всій її довжині площею поперечного перерізу, яка обома торцями підключена до одного з полюсів джерела зварювального...
Модульний двокоординатний електромеханічний тренажер стрільця

Номер патенту: 98236
Опубліковано: 25.04.2012
Автори: Хижняк Олексій Андрійович, Васильєв Валерій Валентинович, Беліков Віктор Тріфонович, Толстой Олексій Володимирович, Грачьов Микола Миколайович, Клименко Вадим Миколайович
МПК: F41G 5/00, A63B 24/00, F41A 33/00, F41G 3/26, H02K 41/00, F41G 3/30
Мітки: тренажер, стрільця, модульний, електромеханічний, двокоординатний
Формула / Реферат:
1. Модульний двокоординатний електромеханічний тренажер стрільця, що містить двокоординатний функціональний блок-модуль з двох взаємно перпендикулярних лінійних широкорегульованих електричних приводів, форсованих з високою перевантажувальною здатністю, прямолінійні путьові структури яких попарно паралельно встановлені уздовж кожної з чотирьох меж обслуговуваної прямокутної координатної площини, а симетрично розміщені один проти одного...
Спосіб дешифрування оптичних аномалій на аерокосмічних знімках
Номер патенту: 95679
Опубліковано: 25.08.2011
Автори: Підгородецька Людмила Володимирівна, Федоровський Олександр Дмитрович, Якимчук Владислав Григорович, Тимченко Ігор Євгенович
МПК: G06K 9/74
Мітки: дешифрування, спосіб, оптичних, аномалій, аерокосмічних, знімках
Формула / Реферат:
Спосіб дешифрування оптичних аномалій на аерокосмічних знімках, який оснований на взаємозв’язку між параметрами природного середовища: мультиспектральними, геологічними, топографічними з наявністю відповідних оптичних аномалій, який полягає у тому, що на основі аерокосмічних та наземних досліджень отримують кількісні значення вказаних параметрів для прийнятих за еталонні та досліджуваних ділянок з аналогічними їм параметрами, та...
Попередній патент: Вітроенергетична установка
Наступний патент: Спосіб одержання карбофункціональних борвмісних олігоспиртів
Випадковий патент: Одиничний варіабельний домен імуноглобуліну проти рецептора типу 1 tnfa