Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами
Номер патенту: 103250
Опубліковано: 25.09.2013
Автори: Васильєв Валерій Валентинович, Коваль Андрій Андрійович, Ярмолюк Вадим Михайлович, Беліков Віктор Тріфонович, Фелько Микола В'ячеславович, Гончарук Антон Антонович
Формула / Реферат
1. Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами, що складається з двокоординатного функціонального блока-модуля з паралельним кінематичним механізмом гексаподного типу, що має шість ступенів свободи, при якому нижня основа має жорсткий механічний зв'язок з центральним рухомим елементом двокоординатного електромеханічного приводу, робоче місце тренованого оператора закріплене на верхній площадці гексаподного механізму, який відрізняється тим, що двокоординатний електромеханічний виконавчий привід є механічно жорстким об'єднанням двох пар координатних лінійних приводів, що кінематично взаємно незалежні один від одного, причому центральний рухомий елемент двокоординатного функціонального блока-модуля виконаний у вигляді повзуна для кожного з взаємно перпендикулярних жорстких стрижнів, що сполучають протилежні рухомі модулі лінійних приводів кожного з координатних напрямів.
2. Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами за п. 1, який відрізняється тим, що платформа-основа паралельного кінематичного механізму гексаподного типу забезпечена як мінімум трьома вертикальними осями, встановленими з можливістю вільного обертання в опорах кочення, на яких ексцентрично закріплені опорні колеса, що мають механічний опорний контакт з платформою-основою тренажера.
3. Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами за п. 1 або 2, який відрізняється тим, що платформа-основа гексаподного механізму з шістьма ступенями свободи жорстко закріплена на роторі плоского торцевого електричного двигуна обертального типу, статор якого встановлений на центральній рухомій площадці двокоординатного лінійного електроприводу.
4. Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами за п. 1 або 3, який відрізняється тим, що його двокоординатний лінійний електропривід закріплений на вертикальних опорах або стельових балках-перекриттях тренажерного приміщення, причому гексаподний механізм з шістьма ступенями свободи встановлений на горизонтальній рухомій площадці двокоординатного лінійного електроприводу або на роторі її торцевого поворотного електродвигуна так, щоб рухома платформа гексаподного механізму була обернена вниз і забезпечена додатковою паралельною площадкою для розміщення робочого місця-кабіни тренованого оператора.
Текст
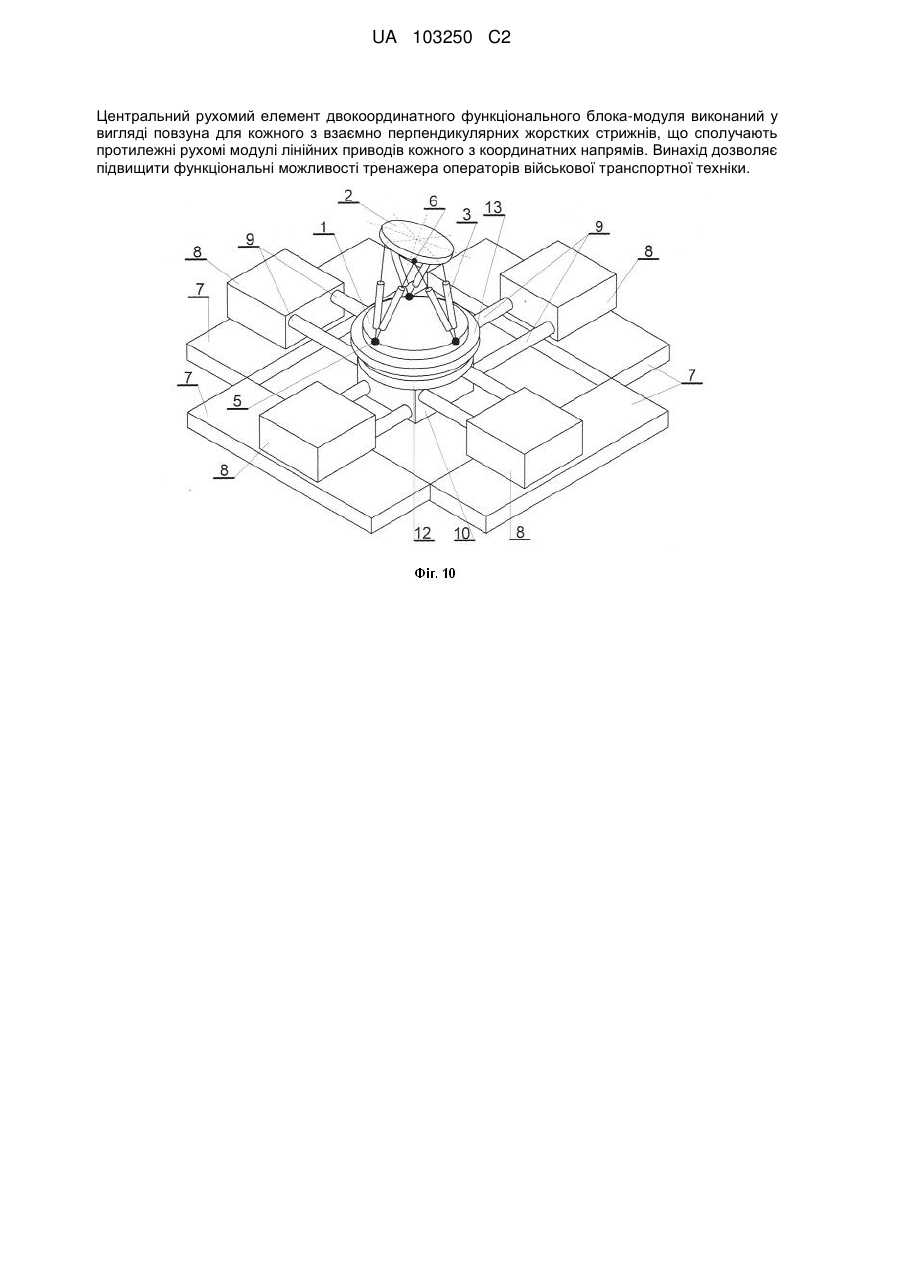
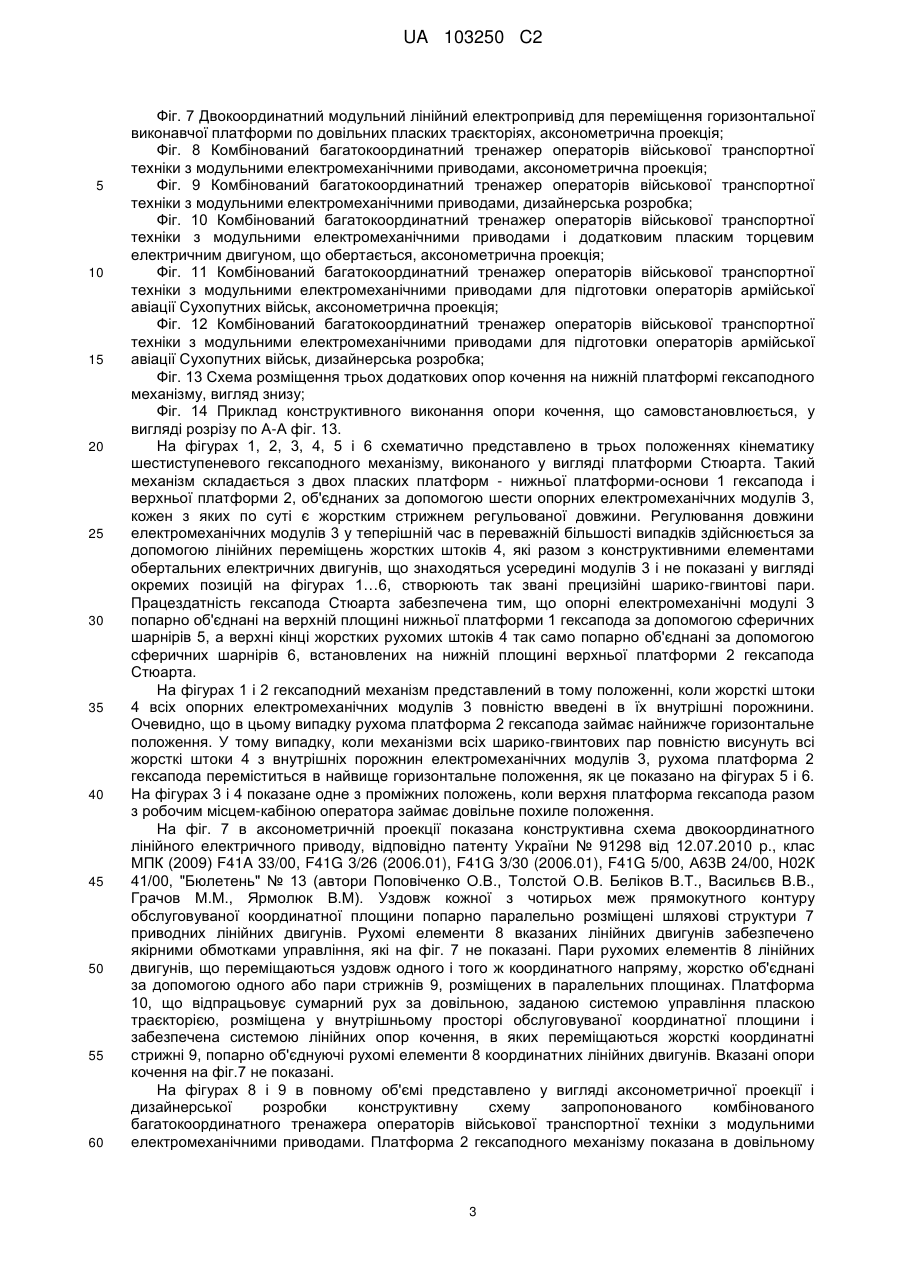
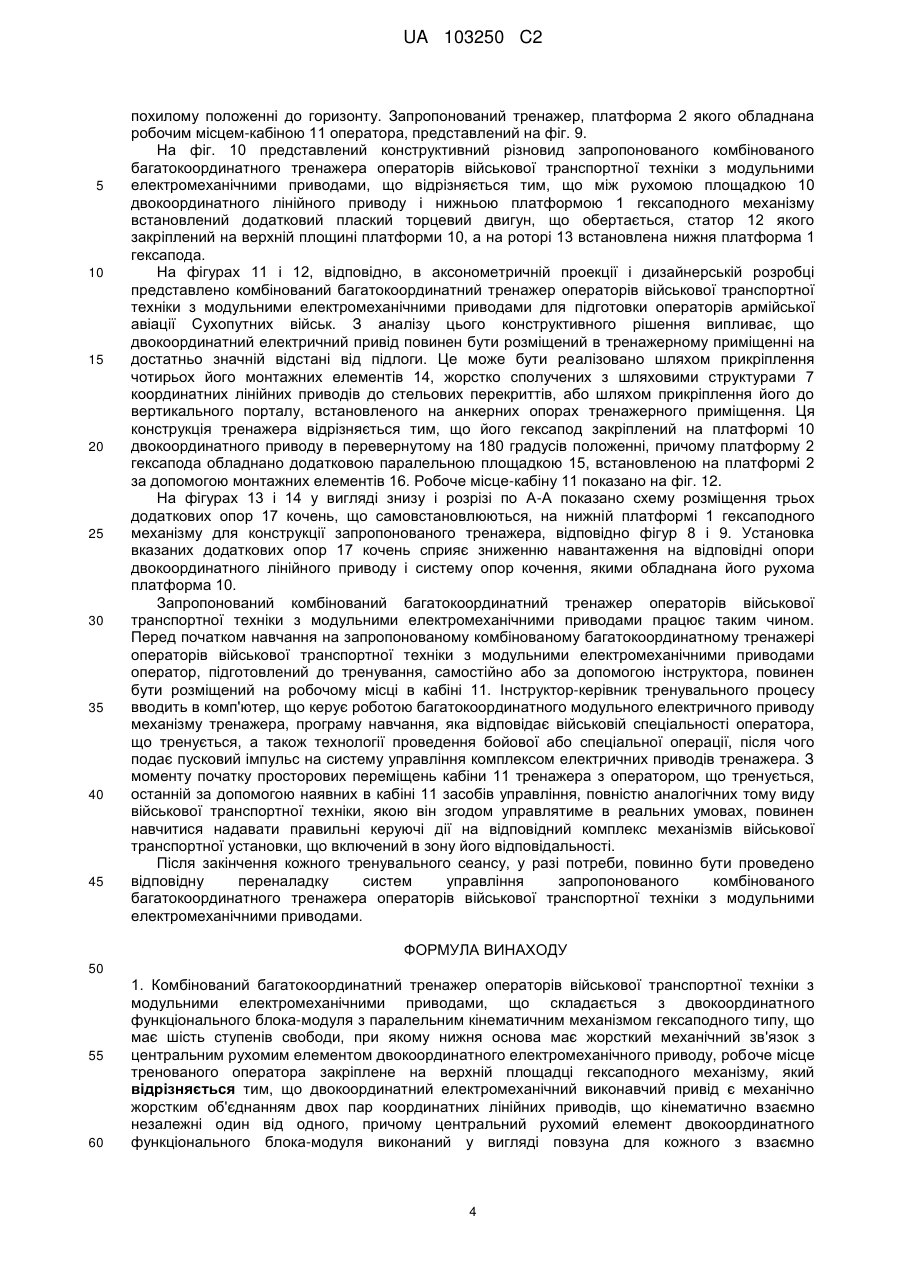
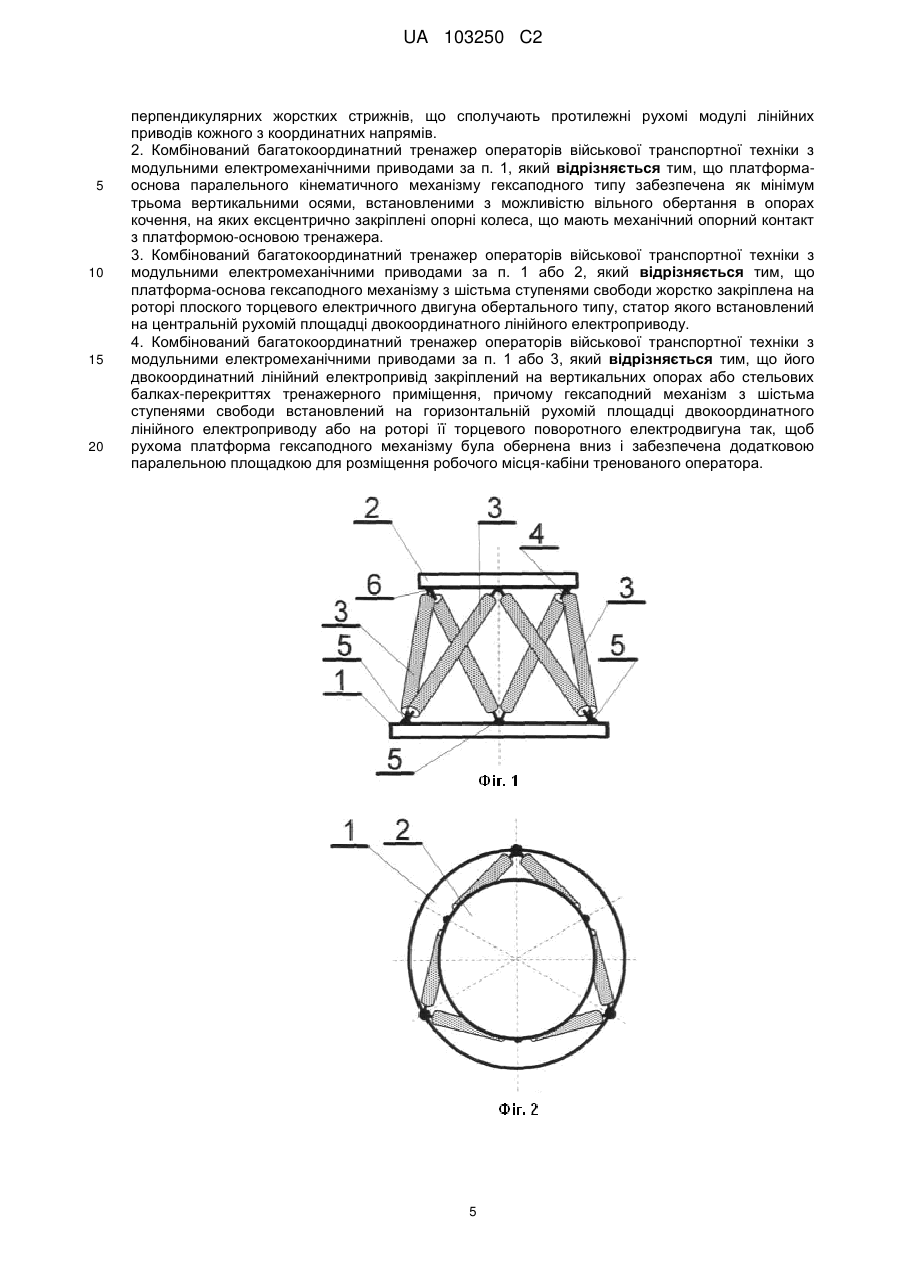
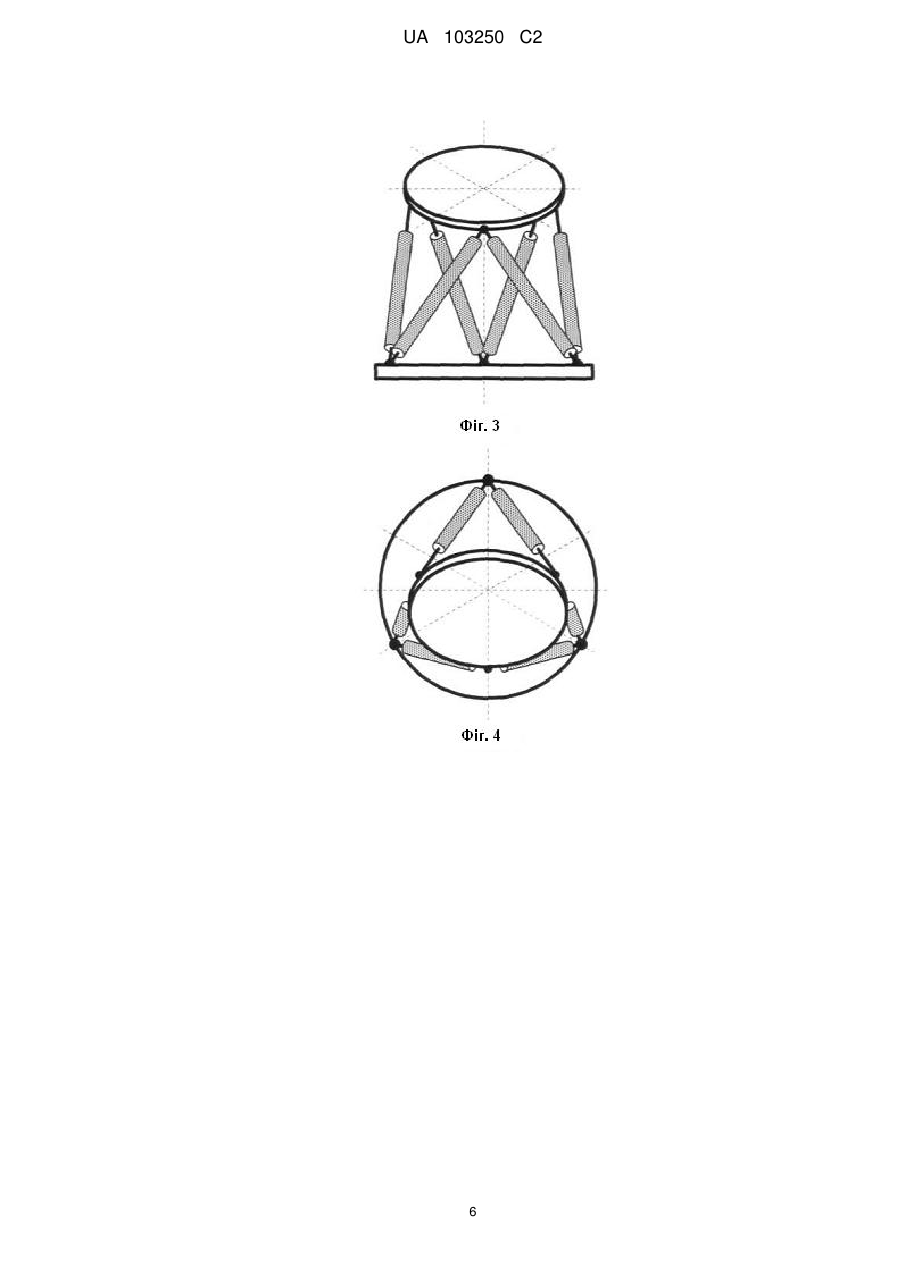
Реферат: Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами складається з двокоординатного функціонального блока-модуля з паралельним кінематичним механізмом гексаподного типу, що має шість ступенів свободи, при якому нижня основа має жорсткий механічний зв'язок з центральним рухомим елементом двокоординатного електромеханічного приводу, робоче місце тренованого оператора закріплене на верхній площадці гексаподного механізму. Двокоординатний електромеханічний виконавчий привід є механічно жорстким об'єднанням двох пар координатних лінійних приводів, що кінематично взаємно незалежні один від одного. UA 103250 C2 (12) UA 103250 C2 Центральний рухомий елемент двокоординатного функціонального блока-модуля виконаний у вигляді повзуна для кожного з взаємно перпендикулярних жорстких стрижнів, що сполучають протилежні рухомі модулі лінійних приводів кожного з координатних напрямів. Винахід дозволяє підвищити функціональні можливості тренажера операторів військової транспортної техніки. UA 103250 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до області військової техніки, а саме, до спеціальної тренажерної техніки військового призначення, що призначена для індивідуального тренування операторів військової транспортної техніки з метою вироблення стійких навичок водіння при постійній дії на водія різноспрямованих динамічних зусиль, які виникають, наприклад, при русі з постійними змінами напряму руху, що особливо характерне при необхідності швидкого переміщення по пересіченій місцевості, а так само в умовах проведення інтенсивних бойових дій в населених пунктах. Перспективна галузь застосування запропонованого комбінованого багатокоординатного тренажера операторів військової транспортної техніки з модульними електромеханічними приводами - тренажерні механізми і комплекси, що використовуються для такої підготовки операторів військової транспортної техніки, включаючи армійську авіацію Сухопутних військ, яка повинна гарантувати вироблення у них стійких динамічних стереотипів водіння сучасних військових бойових і транспортних машин в складних фізико-географічних і кліматичних умовах. Відомі і достатньо часто використовуються у вітчизняній і зарубіжній практиці тренажери операторів наземної, морської і повітряної транспортної техніки, що розроблені на основі багатокоординатних кінематичних механізмів, які мають так звану паралельну структуру. Докладний аналіз цих багатокоординатних кінематичних механізмів на високому теоретичному і практичному рівні представлений в монографії російського професора І.Н. Єгорова "Позиционно-силовое управление робототехническими и мехатронными устройствами" (Владимир: Видавництво ВГУ, 2010. - 192 с.). Одним з найбільш характерних і широко поширених в тренажерній техніці кінематичних механізмів вказаного вище типу є платформа Стюарта (див. вказану вище монографію проф. Єгорова І.Н., с. 14-17). Це є гексапод, що має шість ступенів свободи. На верхній платформі гексапода встановлено робоче місце-кабіна оператора військового транспортного засобу. Як прототип комбінованого багатокоординатного тренажера операторів військової транспортної техніки з модульними електромеханічними приводами, що пропонується, прийнятий шестиступеневий динамічний стенд опорного типу, який описаний в патенті України № 23144, клас МПК G09B9/08. "Бюлетень" № 3, 30.06.98 г. на "Спосіб управління приводними ланками шестиступеневого динамічного стенда опорного типу при формуванні кутових переміщень платформи" (автори Сотников Д.А., Кабанячий В.В.). Тренажер-прототип для підготовки операторів військової транспортної техніки, який має кінематичний механізм у вигляді гексапода Стюарта, що має шість ступенів свободи, властивий ряд недоліків, які обмежують сферу його практичного застосування. Так, в механізмах з паралельною структурою, до яких належить платформа Стюарта, унаслідок наявності сил і моментів сил тертя в кінематичних парах з'являється небезпека заклинювання механізму поблизу особливих положень. Проте найсерйознішим недоліком гексаподних механізмів є наявність принципових кінематичних обмежень величин лінійних переміщень оператора в горизонтальних площинах, паралельних площині основи тренажера. Це пов'язано з тим, що збільшення довжини його шести опор, що змінюються в процесі роботи гексапода, призводить до різкої втрати стійкості всього механізму в цілому. Остання обставина значно знижує функціональність тренажера-прототипу, кінематика якого заснована виключно на використанні механізмів гексаподного типу. Задача усунення вказаних вище недоліків прототипу вирішена в комбінованому багатокоординатному тренажері операторів військової транспортної техніки з модульними електромеханічними приводами, що пропонується, наступним чином. Кінематичну схему запропонованого багатокоординатного тренажера виконано у вигляді конструктивного об'єднання лінійного двокоординатного електричного приводу, що складається з двох взаємно перпендикулярних широкорегульованих електродвигунів, що форсуються, розміщених в одній координатній площині, запропонованого в патенті України № 91298 від 12.07.2010 p., клас МПК (2009) F41A 33/00, F41G 3/26 (2006.01), F41G 3/30 (2006.01), F41G 5/00, А63В 24/00, Н02К 41/00, "Бюлетень" №13 (автори Поповіченко О.В., Толстой О.В. Беліков В.Т., Васильєв В.В., Грачов М.М., Ярмолюк В.М.) для двокоординатного електромеханічного тренажера стрільця, з паралельним кінематичним механізмом гексаподного типу з шістьма ступенями свободи, що має конструктивну форму гексапода Стюарта. При цьому нижню опорну платформу такого гексаподного механізму жорстко закріплено на верхній площині рухомого майданчику двохкоординатного лінійного приводу, який відпрацьовує задане системою управління переміщення гексапода по довільній пласкій траєкторії. В цьому випадку робоче місце-кабіна оператора повинно знаходитися на верхній площині верхньої платформи гексаподного механізму. Кінематичний аналіз запропонованої в цій заявці на видачу патенту конструкції тренажера показав, що він здатний забезпечити широкий діапазон реалізації переміщень водія 1 UA 103250 C2 5 10 15 20 25 30 35 40 45 50 55 60 оператора, що тренується, по складних просторових траєкторіях, досягши повного спектра потрібних прискорень. Подальше підвищення функціональних можливостей комбінованого багатокоординатного тренажера операторів військової транспортної техніки з модульними електромеханічними приводами, що пропонується, досягнуто шляхом установки нижньої платформи гексаподного механізму безпосередньо на роторі плаского торцевого електричного двигуна обертального типу, статор якого закріплений на верхній площині рухомої платформи двокоординатного лінійного електричного приводу. З метою використання комбінованого багатокоординатного тренажера операторів військової транспортної техніки з модульними електромеханічними приводами, що пропонується, для спеціальної підготовки операторів армійської авіації Сухопутних військ, запропоновано встановити його двокоординатний лінійний привід на вертикальних опорах або прикріпити його до стельових балок-перекриттів тренажерного приміщення, причому в цьому випадку гексаподний механізм повинен бути обернений на 180 градусів в порівнянні з його положенням у попередньому випадку. Очевидно, що для забезпечення нормального функціонування цієї конструктивної модифікації запропонованого тренажера функціональну платформу гексаподного механізму необхідно обладнати додатковою паралельною площадкою для розміщення робочого місця-кабіни оператора. З метою розвантаження напрямних двокоординатного приводу запропоновано закріпити на основі гексаподного механізму щонайменше три опори кочення, що самовстановлюються. Їх колеса повинні рухатись по верхній площині основи тренажера. Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами складається з двокоординатного функціонального блока-модуля паралельним кінематичним механізмом гексаподного типу, що має шість ступенів свободи, при якому нижня основа має жорсткий механічний зв'язок з центральним рухомим елементом двокоординатного електромеханічного приводу, робоче місце тренованого оператора закріплене на верхній площадці гексаподного механізму. Двокоординатний електромеханічний виконавчий привід є механічно жорстким об`єднанням двох пар координатних лінійних приводів, що кінематично взаємно незалежні один від одного, причому центральний рухомий елемент двокоординатного функціонального блока-модуля виконаний у вигляді повзуна для кожного з взаємно перпендикулярних жорстких стрижнів, що сполучають протилежні рухомі модулі лінійних приводів кожного з координатних напрямів. Платформа-основа паралельного кінематичного механізму гексаподного типу забезпечена як мінімум трьома вертикальними осями, встановленими з можливістю вільного обертання в опорах кочення, на яких ексцентрично закріплені опорні колеса, що мають механічний опорний контакт з платформою-основою тренажера. Платформа-основа гексаподного механізму з шістьма ступенями свободи жорстко закріплена на роторі плоского торцевого електричного двигуна обертального типу, статор якого встановлений на центральній рухомій площадці двокоординатного лінійного електроприводу. Двокоординатний лінійний електропривод закріплений на вертикальних опорах або стельових балках перекриттях тренажерного приміщення, причому гексаподний механізм з шістьма ступенями свободи встановлений на горизонтальній рухомій площадці двокоординатного лінійного електроприводу або на роторі її торцевого поворотного електродвигуна так, щоб рухома платформа гексаподного механізму була обернена вниз і забезпечена додатковою паралельною площадкою для розміщення робочого місця-кабіни тренованого оператора. На кресленнях, що ілюструють конструктивну суть запропонованого модульного електромеханічного двокоординатного тренажера стрільця, представлені: Фіг. 1. Гексаподний механізм у вигляді платформи Стюарта при розташуванні верхньої платформи в крайньому нижньому, горизонтальному положенні, вигляд спереду; Фіг. 2. Гексаподний механізм у вигляді платформи Стюарта при розташуванні верхньої платформи в крайньому нижньому, горизонтальному положенні, вигляд зверху; Фіг. 3. Гексаподний механізм у вигляді платформи Стюарта при розташуванні верхньої платформи в довільному похилому положенні, вигляд спереду; Фіг. 4. Гексаподний механізм у вигляді платформи Стюарта при розташуванні верхньої платформи в довільному похилому положенні, вигляд зверху; Фіг. 5. Гексаподний механізм у вигляді платформи Стюарта при розташуванні верхньої платформи в крайньому верхньому, горизонтальному положенні, вигляд спереду; Фіг. 6. Гексаподний механізм у вигляді платформи Стюарта при розташуванні верхньої платформи в крайньому верхньому, горизонтальному положенні, вигляд зверху; 2 UA 103250 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 7 Двокоординатний модульний лінійний електропривід для переміщення горизонтальної виконавчої платформи по довільних пласких траєкторіях, аксонометрична проекція; Фіг. 8 Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами, аксонометрична проекція; Фіг. 9 Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами, дизайнерська розробка; Фіг. 10 Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами і додатковим пласким торцевим електричним двигуном, що обертається, аксонометрична проекція; Фіг. 11 Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами для підготовки операторів армійської авіації Сухопутних військ, аксонометрична проекція; Фіг. 12 Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами для підготовки операторів армійської авіації Сухопутних військ, дизайнерська розробка; Фіг. 13 Схема розміщення трьох додаткових опор кочення на нижній платформі гексаподного механізму, вигляд знизу; Фіг. 14 Приклад конструктивного виконання опори кочення, що самовстановлюється, у вигляді розрізу по А-А фіг. 13. На фігурах 1, 2, 3, 4, 5 і 6 схематично представлено в трьох положеннях кінематику шестиступеневого гексаподного механізму, виконаного у вигляді платформи Стюарта. Такий механізм складається з двох пласких платформ - нижньої платформи-основи 1 гексапода і верхньої платформи 2, об'єднаних за допомогою шести опорних електромеханічних модулів 3, кожен з яких по суті є жорстким стрижнем регульованої довжини. Регулювання довжини електромеханічних модулів 3 у теперішній час в переважній більшості випадків здійснюється за допомогою лінійних переміщень жорстких штоків 4, які разом з конструктивними елементами обертальних електричних двигунів, що знаходяться усередині модулів 3 і не показані у вигляді окремих позицій на фігурах 1…6, створюють так звані прецизійні шарико-гвинтові пари. Працездатність гексапода Стюарта забезпечена тим, що опорні електромеханічні модулі 3 попарно об'єднані на верхній площині нижньої платформи 1 гексапода за допомогою сферичних шарнірів 5, а верхні кінці жорстких рухомих штоків 4 так само попарно об'єднані за допомогою сферичних шарнірів 6, встановлених на нижній площині верхньої платформи 2 гексапода Стюарта. На фігурах 1 і 2 гексаподний механізм представлений в тому положенні, коли жорсткі штоки 4 всіх опорних електромеханічних модулів 3 повністю введені в їх внутрішні порожнини. Очевидно, що в цьому випадку рухома платформа 2 гексапода займає найнижче горизонтальне положення. У тому випадку, коли механізми всіх шарико-гвинтових пар повністю висунуть всі жорсткі штоки 4 з внутрішніх порожнин електромеханічних модулів 3, рухома платформа 2 гексапода переміститься в найвище горизонтальне положення, як це показано на фігурах 5 і 6. На фігурах 3 і 4 показане одне з проміжних положень, коли верхня платформа гексапода разом з робочим місцем-кабіною оператора займає довільне похиле положення. На фіг. 7 в аксонометричній проекції показана конструктивна схема двокоординатного лінійного електричного приводу, відповідно патенту України № 91298 від 12.07.2010 p., клас МПК (2009) F41A 33/00, F41G 3/26 (2006.01), F41G 3/30 (2006.01), F41G 5/00, А63В 24/00, Н02К 41/00, "Бюлетень" № 13 (автори Поповіченко О.В., Толстой О.В. Беліков В.Т., Васильєв В.В., Грачов М.М., Ярмолюк В.М). Уздовж кожної з чотирьох меж прямокутного контуру обслуговуваної координатної площини попарно паралельно розміщені шляхові структури 7 приводних лінійних двигунів. Рухомі елементи 8 вказаних лінійних двигунів забезпечено якірними обмотками управління, які на фіг. 7 не показані. Пари рухомих елементів 8 лінійних двигунів, що переміщаються уздовж одного і того ж координатного напряму, жорстко об'єднані за допомогою одного або пари стрижнів 9, розміщених в паралельних площинах. Платформа 10, що відпрацьовує сумарний рух за довільною, заданою системою управління пласкою траєкторією, розміщена у внутрішньому просторі обслуговуваної координатної площини і забезпечена системою лінійних опор кочення, в яких переміщаються жорсткі координатні стрижні 9, попарно об'єднуючі рухомі елементи 8 координатних лінійних двигунів. Вказані опори кочення на фіг.7 не показані. На фігурах 8 і 9 в повному об'ємі представлено у вигляді аксонометричної проекції і дизайнерської розробки конструктивну схему запропонованого комбінованого багатокоординатного тренажера операторів військової транспортної техніки з модульними електромеханічними приводами. Платформа 2 гексаподного механізму показана в довільному 3 UA 103250 C2 5 10 15 20 25 30 35 40 45 похилому положенні до горизонту. Запропонований тренажер, платформа 2 якого обладнана робочим місцем-кабіною 11 оператора, представлений на фіг. 9. На фіг. 10 представлений конструктивний різновид запропонованого комбінованого багатокоординатного тренажера операторів військової транспортної техніки з модульними електромеханічними приводами, що відрізняється тим, що між рухомою площадкою 10 двокоординатного лінійного приводу і нижньою платформою 1 гексаподного механізму встановлений додатковий плаский торцевий двигун, що обертається, статор 12 якого закріплений на верхній площині платформи 10, а на роторі 13 встановлена нижня платформа 1 гексапода. На фігурах 11 і 12, відповідно, в аксонометричній проекції і дизайнерській розробці представлено комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами для підготовки операторів армійської авіації Сухопутних військ. З аналізу цього конструктивного рішення випливає, що двокоординатний електричний привід повинен бути розміщений в тренажерному приміщенні на достатньо значній відстані від підлоги. Це може бути реалізовано шляхом прикріплення чотирьох його монтажних елементів 14, жорстко сполучених з шляховими структурами 7 координатних лінійних приводів до стельових перекриттів, або шляхом прикріплення його до вертикального порталу, встановленого на анкерних опорах тренажерного приміщення. Ця конструкція тренажера відрізняється тим, що його гексапод закріплений на платформі 10 двокоординатного приводу в перевернутому на 180 градусів положенні, причому платформу 2 гексапода обладнано додатковою паралельною площадкою 15, встановленою на платформі 2 за допомогою монтажних елементів 16. Робоче місце-кабіну 11 показано на фіг. 12. На фігурах 13 і 14 у вигляді знизу і розрізі по А-А показано схему розміщення трьох додаткових опор 17 кочень, що самовстановлюються, на нижній платформі 1 гексаподного механізму для конструкції запропонованого тренажера, відповідно фігур 8 і 9. Установка вказаних додаткових опор 17 кочень сприяє зниженню навантаження на відповідні опори двокоординатного лінійного приводу і систему опор кочення, якими обладнана його рухома платформа 10. Запропонований комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами працює таким чином. Перед початком навчання на запропонованому комбінованому багатокоординатному тренажері операторів військової транспортної техніки з модульними електромеханічними приводами оператор, підготовлений до тренування, самостійно або за допомогою інструктора, повинен бути розміщений на робочому місці в кабіні 11. Інструктор-керівник тренувального процесу вводить в комп'ютер, що керує роботою багатокоординатного модульного електричного приводу механізму тренажера, програму навчання, яка відповідає військовій спеціальності оператора, що тренується, а також технології проведення бойової або спеціальної операції, після чого подає пусковий імпульс на систему управління комплексом електричних приводів тренажера. З моменту початку просторових переміщень кабіни 11 тренажера з оператором, що тренується, останній за допомогою наявних в кабіні 11 засобів управління, повністю аналогічних тому виду військової транспортної техніки, якою він згодом управлятиме в реальних умовах, повинен навчитися надавати правильні керуючі дії на відповідний комплекс механізмів військової транспортної установки, що включений в зону його відповідальності. Після закінчення кожного тренувального сеансу, у разі потреби, повинно бути проведено відповідну переналадку систем управління запропонованого комбінованого багатокоординатного тренажера операторів військової транспортної техніки з модульними електромеханічними приводами. ФОРМУЛА ВИНАХОДУ 50 55 60 1. Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами, що складається з двокоординатного функціонального блока-модуля з паралельним кінематичним механізмом гексаподного типу, що має шість ступенів свободи, при якому нижня основа має жорсткий механічний зв'язок з центральним рухомим елементом двокоординатного електромеханічного приводу, робоче місце тренованого оператора закріплене на верхній площадці гексаподного механізму, який відрізняється тим, що двокоординатний електромеханічний виконавчий привід є механічно жорстким об'єднанням двох пар координатних лінійних приводів, що кінематично взаємно незалежні один від одного, причому центральний рухомий елемент двокоординатного функціонального блока-модуля виконаний у вигляді повзуна для кожного з взаємно 4 UA 103250 C2 5 10 15 20 перпендикулярних жорстких стрижнів, що сполучають протилежні рухомі модулі лінійних приводів кожного з координатних напрямів. 2. Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами за п. 1, який відрізняється тим, що платформаоснова паралельного кінематичного механізму гексаподного типу забезпечена як мінімум трьома вертикальними осями, встановленими з можливістю вільного обертання в опорах кочення, на яких ексцентрично закріплені опорні колеса, що мають механічний опорний контакт з платформою-основою тренажера. 3. Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами за п. 1 або 2, який відрізняється тим, що платформа-основа гексаподного механізму з шістьма ступенями свободи жорстко закріплена на роторі плоского торцевого електричного двигуна обертального типу, статор якого встановлений на центральній рухомій площадці двокоординатного лінійного електроприводу. 4. Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами за п. 1 або 3, який відрізняється тим, що його двокоординатний лінійний електропривід закріплений на вертикальних опорах або стельових балках-перекриттях тренажерного приміщення, причому гексаподний механізм з шістьма ступенями свободи встановлений на горизонтальній рухомій площадці двокоординатного лінійного електроприводу або на роторі її торцевого поворотного електродвигуна так, щоб рухома платформа гексаподного механізму була обернена вниз і забезпечена додатковою паралельною площадкою для розміщення робочого місця-кабіни тренованого оператора. 5 UA 103250 C2 6 UA 103250 C2 7 UA 103250 C2 8 UA 103250 C2 9 UA 103250 C2 10 UA 103250 C2 Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Автори англійськоюYarmoliuk Vadym Mykhailovych, Belikov Viktor Tryfonovych, Vasyliev Valerii Valentynovych
Автори російськоюЯрмолюк Вадим Михайлович, Беликов Виктор Трифонович, Васильев Валерий Валентинович
МПК / Мітки
МПК: F41G 5/00, F41A 33/00, H02K 41/00, A63B 24/00, F41G 3/26
Мітки: військової, модульними, операторів, техніки, багатокоординатний, транспортної, приводами, електромеханічними, комбінований, тренажер
Код посилання
<a href="https://ua.patents.su/13-103250-kombinovanijj-bagatokoordinatnijj-trenazher-operatoriv-vijjskovo-transportno-tekhniki-z-modulnimi-elektromekhanichnimi-privodami.html" target="_blank" rel="follow" title="База патентів України">Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами</a>
Універсальна електромеханічна реабілітаційна установка з модульними приводами
Номер патенту: 99583
Опубліковано: 27.08.2012
Автори: Петоян Володимир Каренович, Васильєв Валерій Валентинович, Петоян Карен Володимирович, Беліков Віктор Тріфонович, Гончарук Антон Антонович
МПК: A63B 23/04, A63B 24/00, A63B 69/06, A63B 22/00
Мітки: реабілітаційна, установка, модульними, універсальна, електромеханічна, приводами
Формула / Реферат:
1. Універсальна електромеханічна реабілітаційна установка з модульними приводами, що складається з одного або декількох основних функціональних блоків-модулів у вигляді лінійних електричних приводів, у яких виконавчі рухомі силові органи, що несуть фіксатори кінцівок пацієнта, що розроблюються, можуть бути виконані у вигляді укорочених активних конструктивних елементів лінійних електродвигунів, що несуть якірні обмотки управління, підключені...
Пересувна майстерня ремонту озброєння і військової техніки
Номер патенту: 77641
Опубліковано: 25.02.2013
Автори: Яльницький Олег Дмитрович, Мельник Борис Олександрович, Дачковський Володимир Олександрович, Семененко В'ячеслав Михайлович
МПК: B60S 5/00
Мітки: пересувна, ремонту, озброєння, техніки, військової, майстерня
Формула / Реферат:
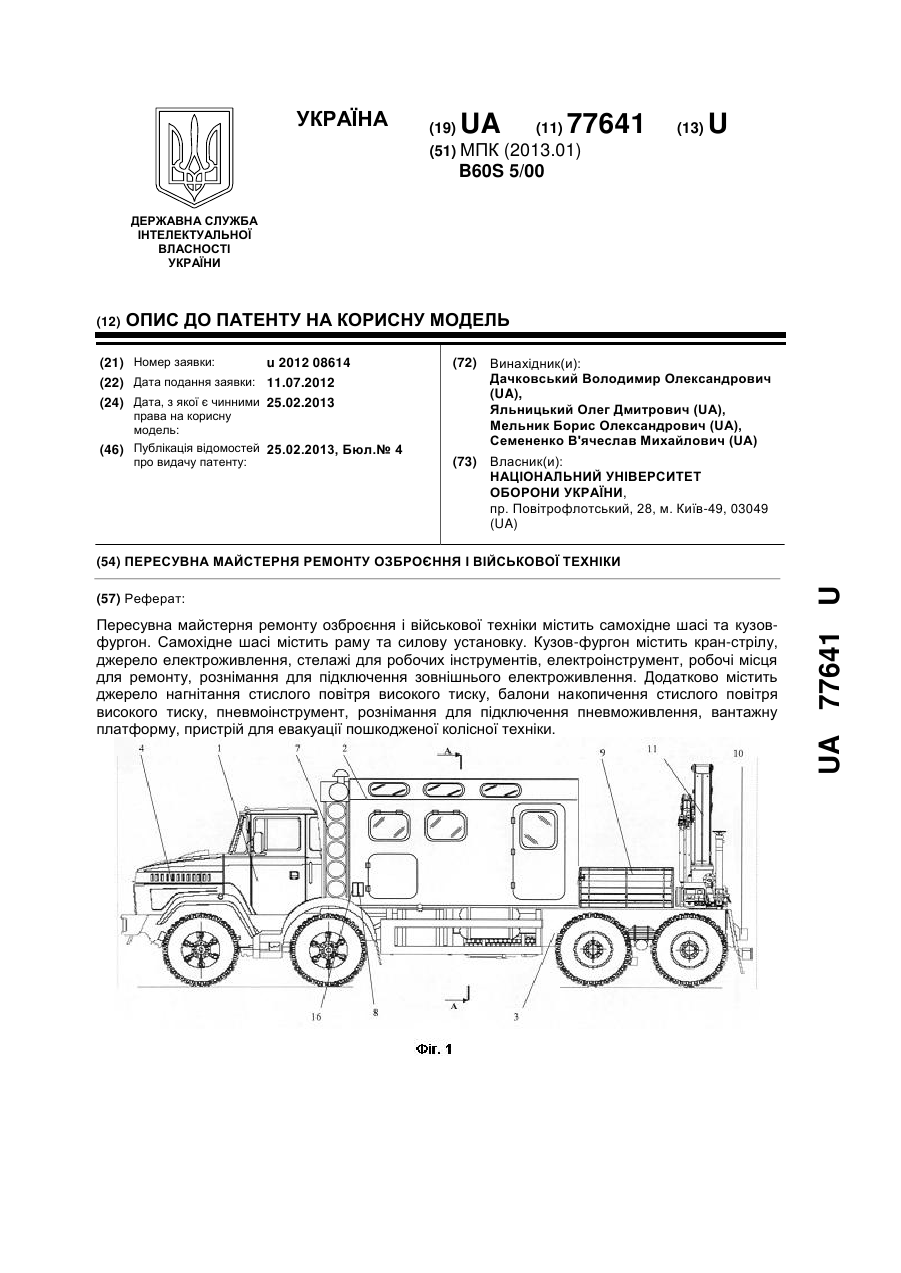
Пересувна майстерня ремонту озброєння і військової техніки, що містить самохідне шасі, кузов-фургон, при цьому самохідне шасі містить раму, силову установку, а кузов-фургон містить кран-стрілу, джерело електроживлення, стелажі для робочих інструментів, електроінструмент, робочі місця для ремонту, рознімання для підключення зовнішнього електроживлення, причому кузов-фургон розташований на самохідному шасі, яка відрізняється тим, що додатково...
Тренажер для операторів транспортних засобів

Номер патенту: 49722
Опубліковано: 16.09.2002
Автори: Ярмолюк Вадим Михайлович, Головань В'ячеслав Григорович, Крапива Валерій Вікторович
Мітки: тренажер, операторів, засобів, транспортних
Формула / Реферат:
1. Тренажер для операторів транспортних засобів, який містить раму, кабіни, симетрично розміщені на кінцях хитної рами, кінематично зв'язаної із системою переміщення кабін, привід для їх переміщення, який відрізняється тим, що система переміщення кожної кабіни складається з електричних двигунів, корпуси яких жорстко з'єднані з основою кабін, другорядним елементом яких є напрямні рами, виконані у вигляді каркасів, що опираються на шаровий...
Тренажер для відпрацювання техніки лапароскопічних та відеоасистованих оперативних втручань
Номер патенту: 53124
Опубліковано: 27.09.2010
Автори: Гривенко Ірина Сергіївна, Гривенко Сергій Геннадійович
МПК: A61B 17/00
Мітки: тренажер, оперативних, лапароскопічних, відеоасистованих, відпрацювання, техніки, втручань
Формула / Реферат:
1. Тренажер для відпрацювання техніки лапароскопічних та відеоасистованих оперативних втручань, що містить ящик з технологічними отворами в проксимальній стінці і пристрій для відеонагляду, який відрізняється тим, що верхня стінка тренажера має напівкруглу форму, а в технологічних отворах розміщені гумові вставки з хрестоподібними розрізами для фіксування портів з ендовідеоінструментами.2. Тренажер для відпрацювання техніки...
Тренажер для відпрацювання техніки ударів тє-1
Номер патенту: 66995
Опубліковано: 15.06.2004
Автор: Єрьомін Сергій Анатолійович
МПК: A63B 69/00
Мітки: тренажер, тє-1, техніки, ударів, відпрацювання
Формула / Реферат:
Тренажер для відпрацювання техніки ударів ТЄ-1, що містить вертикальну вісь, на якій розміщені імітатор голови і імітатор верхніх кінцівок, виконаний у вигляді двох горизонтальних протилежно розміщених рук, який відрізняється тим, що він додатково оснащений імітатором нижніх кінцівок, причому останній і імітатор голови виконані у вигляді автомобільних покришок, зафіксованих на вертикальній осі одна над одною, між якими встановлений з...
Попередній патент: Газовий двигун внутрішнього згоряння, конвертований з дизеля
Наступний патент: Спосіб агломерації залізорудних матеріалів
Випадковий патент: Спосіб профілактики рецидиву генералізованого пародонтиту у наркозалежних із токсичним гепатитом