Спосіб і пристрій для вимірювання циліндрів
Номер патенту: 109263
Опубліковано: 10.08.2015
Автори: абоарді Паоло, юкользі Массіміліано, Порта Фабріціо, Андерссон Томас

Формула / Реферат
1. Пристрій для визначення геометрії робочих циліндрів, зокрема, під час їх шліфування, який містить:
пару затискачів (13, 14), виконаних з можливістю рухатись в напрямку один від одного або в напрямку один до одного відносно проміжної нерухомої структури (15),
затискачі (13, 14) мають поверхні (19, 20), нахилені в протилежних напрямках так, що вони відхиляються одна від одної відносно циліндра (11), геометрію якого вимірюють, причому затискачі виконано так, що циліндр розміщується між ними і між поверхнею (21) нерухомої проміжної структури (15),
причому поверхні (19, 20) затискачів (13, 14) і поверхня (21) нерухомої проміжної структури (15) завжди перебувають в контакті з циліндром (11), незалежно від того чи знаходиться циліндр в статичному стані, чи обертається,
нерухома структура (15) має у своїй внутрішній частині частини групи, які взаємодіють одна з одною (32, 33; 29,43; 28, 35, 36, 3738) , для кореляції руху затискачів (13, 14),
група має верхні рухомі стрижні або частини (32) і нижні рухомі стрижні або частини (33), що несуть затискачі (13, 14) і з'єднані для синхронного руху в протилежних напрямках за допомогою тросової або дротової системи (43) і шківа (29), і
верхній і нижній рухомі стрижні або частини мають різну вагу, а саме верхній рухомий стрижень або частина (32) має більшу вагу, ніж нижній рухомий стрижень або частина (33), і різниця у вазі між ними дозволяє піднімати нижній рухомий стрижень або частину (33).
2. Пристрій для визначення геометрії робочих циліндрів, зокрема, під час їх шліфування, який містить:
пару затискачів (13, 14), виконаних з можливістю рухатись в напрямку один від одного або в напрямку один до одного відносно проміжної нерухомої структури (15),
затискачі (13, 14) мають поверхні (19, 20), нахилені в протилежних напрямках так, що вони відхиляються одна від одної відносно циліндра (11), геометрію якого вимірюють, причому затискачі виконано так, що циліндр розміщується між ними і між поверхнею (21) нерухомої проміжної структури (15),
причому поверхні (19, 20) затискачів (13, 14) і поверхня (21) нерухомої проміжної структури (15) завжди перебувають в контакті з циліндром (11), незалежно від того чи знаходиться циліндр в статичному стані, чи обертається,
нерухома структура (15) має у своїй внутрішній частині частини групи, які взаємодіють одна з одною (32, 33; 29, 43; 28, 35, 36, 37, 38) для кореляції руху затискачів (13, 14),
група має верхні рухомі стрижні або частини (32) і нижні рухомі стрижні або частини (33), що несуть затискачі (13, 14) і з'єднані для синхронного руху в протилежних напрямках за допомогою тросової або дротової системи (43) і шківа (29), і
тросова або дротова система (43) і шків (29) має кінець дроту (43) прикріпленого до стопора (28), прикріпленого до верхнього стрижня (32), причому дріт (43) намотано на шків (29), розміщений у верхній частині нерухомої структури (15), після намотки половини витка навколо шківа (29) і опускання для з'єднання із нижнім стрижнем (33), і дріт пропущено крізь перший блок (35), невід'ємний від дроту (43), але не від нижнього стрижня (33), другий блок (36), невід'ємний від нижнього стрижня (33, але не від дроту (43), який вільно проходить крізь отвір блока (36), і третій блок (37), невід'ємний від іншого кінця дроту (43), утворюючи кінцевий стопор і точку прикладення реакції для попередньо навантаженої пружини (38), яка забезпечує постійний контакт між верхнім затискачем (13), нижнім затискачем (14) і циліндром (11).
3. Пристрій за п. 2, виконаний з можливістю використання при різних відстанях між точкою контакту між циліндром (11) і верхнім затискачем (13) і теоретичною віссю циліндра і точкою контакту між циліндром (11) і нижнім затискачем (14) і віссю циліндра.
4. Спосіб для визначення геометрії робочих циліндрів, зокрема, під час їх шліфування, який полягає в тому, що
циліндр (11), який підлягає відновленню, розміщують у пристрої, який має пару затискачів (13, 14), а саме верхній затискач і нижній затискач, виконаних з можливістю рухатись в напрямку один від одного або в напрямку один до одного відносно проміжної нерухомої структури (15),
створюють у затискачів (13, 14) поверхні (19, 20), нахилені в протилежних напрямках так, що вони відхиляються одна від одної відносно циліндра (11) для його розміщення між затискачами і між поверхнею (21) нерухомої проміжної структури (15), та
утримують поверхні (19, 20) затискачів (13, 14) і поверхню (21) нерухомої проміжної структури (15) завжди в контакті з циліндром (11) незалежно від того чи знаходиться циліндр в статичному стані, чи обертається,
створюють у внутрішній частині проміжної нерухомої структури (15) частини групи (32, 33; 29, 43; 28, 35, 36, 37, 38), які взаємодіють між собою і викликають рух затискачів (13, 14), встановлених на верхньому (32) і нижньому (33) стрижнях,
причому стрижні (32, 33) рухають синхронно в протилежних напрямках і верхній та нижній стрижні (32, 33) мають різну вагу, а саме верхній стрижень (32) має більшу вагу, ніж нижній стрижень (33), і різниця у вазі між ними дозволяє піднімати нижній стрижень (33) за наявності зменшення діаметра циліндра (11), точка (16) контакту між верхнім затискачем (13) і циліндром (11) забезпечується зміщенням угору верхнього стрижня (32) внаслідок контакту між затискачем (13) і циліндром, причому зміщення верхнього стрижня (32) викликає однакове і протилежне зміщення нижнього кронштейна (33), викликане приєднанням за допомогою дроту (43) пружини (38) і різниці у вазі, так що ці обидва затискачі (13, 14) завжди знаходяться у контакті з циліндром (11).
5. Спосіб за п. 4, в якому під час руху верхньої точки контакту до центрального напрямку верхній стрижень опускається під дією сили тяжіння, і натяг дроту стискає пружину (38) на величину, що дорівнює зміщенню, яке враховують, причому це зміщення викликає збільшення попереднього навантаження пружини (38), сила ваги верхнього стрижня здатна викликати її попереднє навантаження, таким чином завжди забезпечуючи контакт двох затискачів (13, 14) з циліндром (11).
6. Спосіб за п. 4, в якому під час руху верхньої точки контакту від центру верхній стрижень піднімається, оскільки його штовхає профіль циліндра, результуюче послаблення натягу дроту компенсується розтягненням пружини (38), тобто втратою попереднього навантаження пружини, що дорівнює зміщенню, яке враховують, причому пристрій є здатним компенсувати зміщення такого типу, доки початкове попереднє навантаження пружини (38) не дорівнюватиме нулю, таким чином завжди забезпечуючи контакт двох затискачів (13, 14) з циліндром (11).
7. Спосіб за п. 4, в якому під час руху нижньої точки контакту до центру нижній стрижень піднімається для підтримання контакту з циліндром, оскільки його штовхає пружина (38), розвантажена на величину, що дорівнює зміщенню, яке враховують, причому пристрій компенсує зміщення такого типу, доки початкове попереднє навантаження пружини (38) не дорівнюватиме нулю, таким чином завжди забезпечуючи контакт двох затискачів (13, 14) з циліндром (11).
8. Спосіб за п. 4, в якому під час руху нижньої точки контакту від центру нижній стрижень опускається, стискаючи пружину (38), відповідно збільшуючи попереднє навантаження, причому правильна робота пристрою забезпечується доти, доки попереднє навантаження пружини не досягне значень, за яких відбувається від'єднання верхнього затискача від циліндра і тому завжди забезпечується контакт двох затискачів (13, 14) з циліндром (11).
9. Спосіб для визначення геометрії робочих циліндрів, зокрема, під час їх шліфування, який полягає в тому, що
циліндр (11), який підлягає відновленню, розміщують у пристрої, який має пару затискачів (13, 14), а саме верхній затискач і нижній затискач, виконаних з можливістю рухатись в напрямку один від одного або в напрямку один до одного відносно проміжної нерухомої структури (15),
створюють у затискачів (13,14) поверхні (19, 20), нахилені в протилежних напрямках одна до одної відносно циліндра (11), для його розміщення між затискачами і між поверхнею (21) нерухомої проміжної структури (15), та утримують поверхні (19,20) затискачів (13,14) і поверхню (21) нерухомої проміжної структури (15) завжди в контакті з циліндром (11) незалежно від того чи знаходиться циліндр в статичному стані, чи обертається, створюють у внутрішній частині проміжної нерухомої структури (15) частини групи (32, 33; 29, 43; 28, 35 З6, 37, 38), які взаємодіють між собою і викликають рух затискачів (13 14), встановлених на верхньому (32) і нижньому (33) стрижнях,
причому стрижні (32, 33) рухають синхронно в протилежних напрямках і верхній та нижній стрижні (32, 33) мають різну вагу, а саме верхній стрижень (32) має більшу вагу, ніж нижній стрижень (33), і різниця у вазі між ними дозволяє піднімати нижній стрижень (33), за наявності збільшення діаметра циліндра (11), точка (16) контакту між верхнім затискачем (13) і циліндром (11) забезпечується зміщенням угору верхнього стрижня (32) внаслідок контакту між затискачем (13) і циліндром, причому зміщення верхнього стрижня (32) викликає однакове і протилежне зміщення нижнього кронштейна (33), викликане приєднанням з допомогою дроту (43) пружини (38) і різниці у вазі, так що ці обидва затискачі (13,14) завжди знаходяться у контакті з циліндром (11).
Текст
Реферат: Пристрій для визначення геометрії робочих циліндрів, зокрема, в ході їх шліфування, який містить у собі пару рухомих вимірювальних затискачів (13, 14), які можуть рухатись в напрямку одна до одної і в напрямку одна від одної відносно нерухомої проміжної структури (15), вимірювальні губи (13, 14) мають похилі поверхні (19, 20), нахилені у протилежних напрямках згідно з V-подібною формою відносно циліндра (11), який вимірюють, і який встановлений між ними і між поверхнею (21) нерухомої проміжної структури (15), поверхні (19, 20) рухомих вимірювальних затискачів (13, 14) і поверхня (21) нерухомої проміжної структури (15) завжди перебувають у контакті з циліндром (11) як при його зупинці, так і при його обертанні, нерухома структура (15) також має всередині частини групи (32, 33; 29, 43; 28, 35, 36, 37, 38), які взаємодіють одна з одною для контролювання руху вимірювальних затискачів (13, 14). UA 109263 C2 (12) UA 109263 C2 UA 109263 C2 5 10 15 20 25 30 35 40 45 50 55 60 Предметом цього винаходу є спосіб і пристрій для визначення геометрії робочих циліндрів, наприклад, циліндрів для обробки матеріалів, таких як ті, які призначені для прокатних станів. Спосіб і пристрій згідно винаходу зокрема, але не виключно, призначені для використання в ході шліфування вказаних робочих циліндрів. Крім того, спосіб і пристрій згідно винаходу можуть бути застосовані не тільки для циліндрів в прокатних станах для отримання металевих стрічок, а також в інших галузях, де використовується обробка шліфуванням циліндрів, вальців і подібних деталей для паперової промисловості, в загальному випадку, плоских слоїстих матеріалів з кольорових металів і/або в таких галузях як будівництво двигунів для морських кораблів і/або гідравлічних систем, які мають великі розміри, тобто для промисловості взагалі. Як добре відомо експертам в цій галузі, прокатні стани зменшують товщину листових матеріалів вихідних матеріалів (сталі, алюмінію або інших матеріалів) до потрібного розміру. Циліндри прокатних станів розроблені для передачі навантаження, необхідного для деформації матеріалу з нерухомої структури (корпус прокатного стану) в стрічку. В ході прокатування навантаження, викликане прямим контактом зі стрічкою або з іншими циліндрами (у випадку проміжних або опорних циліндрів), додаткове навантаження і, у багатьох випадках, піддавання високим температурам викликають явище зношування, втоми і різних типів пошкоджень самих циліндрів. Ці явища механічного і термічного походження погіршують поверхню циліндрів і, з одного боку, викликають дефекти, наприклад, порушення форми, зубці або нерівності поверхні, що знижує якість стрічки і, таким чином, ціну її продажу, з іншого боку, вони також можуть викликати порушення структури (наприклад, вигорання і тріщини), які можуть призвести до катастрофічних наслідків, таких як руйнування циліндра під час прокатування, що призводить до більш серйозних економічних втрат. Тому циліндри періодично демонтують з корпусів, їх геометричні розміри вимірюють, аналізують за допомогою технологій неруйнуючого контролю (НК) і відновлюють шліфуванням перед відновленням їх роботи. В результаті для набору циліндрів необхідні значні інвестиції, і кожна інновація, яка дозволяє зменшити час вимірювання і відновлення, підвищує їх точність і надійність і подовжує термін їх служби, призводить до чистого і відчутного прибутку виробника прокату. Зокрема, поточний огляд пристроїв для вимірювання геометричних розмірів робочих циліндрів характеризується дуже складними і дорогими рішеннями, в яких визначення геометричних розмірів циліндра виконується пристроями в кількох точках вимірювання з дотриманням необхідних умов, що через їх складність є також обтяжливим. Рішення такого типу запропоноване в патенті WO2006084072. Крім того, в патенті US 6, 159, 074 або патенті JP 8285504 описані засоби вимірювання з двома точками вимірювання, які можуть вимірювати відхилення форми за допомогою двох вимірювальних інструментів, розміщених діаметрально протилежних позиціях, або за допомогою одного інструменту з роздвоєним кінцем. Одначе, у цих випадках простота конструкції і обмежена вартість досягаються за рахунок зменшення точності і надійності вимірювання та критичного і складного калібрування інструмента. Головним предметом цього винаходу є надання вимірювального пристрою, який вільний від недоліків відомих в цій галузі рішень за рахунок простоти, яка в будь-якому випадку здатна забезпечити надійність і точність, необхідні для цього типу вимірювань. Крім того, предметом винаходу є надання вимірювального пристрою для визначення геометричних розмірів циліндрів, зокрема, в ході шліфування, який є дуже простим, економним і функціональним. З огляду на вказані вище обставини спосіб і пристрій згідно цього винаходу задумані для визначення профілю циліндрів і мають властивості, вказані у формулі винаходу. Структурні і функціональні властивості цього винаходу і його переваги відносно відомих в цій галузі рішень будуть описані нижче з посиланням на рисунки, на яких показаний пристрій, виготовлений згідно винаходу. На фігурах: - фіг.1 – збільшений вигляд збоку, на якому схематично показаний пристрій згідно винаходу, який може бути встановлений, наприклад, на шліфувальній машині (не показана); - фіг.2 – збільшений вигляд, подібний вигляду, показаному на рис. 1, на якому пристрій вимірює циліндр екстремально малих розмірів порівняно з фіг.1; - фіг.3 – схематичний вигляд, на якому показаний пристрій, встановлений на шліфувальній машині; - фіг.4 і фіг.5 – розрізи одного з варіантів реалізації пристрою згідно винаходу; - фіг.6 – збільшений вигляд деталей з фіг.4; 1 UA 109263 C2 5 10 15 20 25 30 35 40 45 50 55 - фіг.7-9 – вигляди, подібні виглядам, показаним на фіг. 1 фіг.2 в ході різних робочих етапів; - фіг.10 – частковий збільшений розріз пристрою з фіг.1-9 для ілюстрації деяких деталей; - фіг.11-14 – вигляди, які ілюструють роботу способу і пристрою згідно винаходу. Відомо, шліфувальна машина, на якій може бути встановлений пристрій, який є предметом винаходу, має шліфувальний візок CR, який ковзає по основі, вказаний візок CR підтримує шліфувальну головку 61, оснащену відповідним шліфувальним кругом. На фіг.3 видно, що пристрій, як показано, може бути встановлений на передній частині шліфувальної машини для циліндрів, вальців та їм подібним, яким би не було їх призначення, це рішення може бути реалізоване встановленням пристрою на головку тримача шліфувального круга або візка тримача шліфувального круга, на спеціальний візок, який ковзає на додатковій основі, розміщеній на протилежній стороні головки тримача шліфувального круга відносно циліндра. Пристрій згідно винаходу 12, зазвичай, встановлюють на незалежній системі (фіг.3), наприклад, на нерухомій структурі 60, інтегрованої з головкою 61 машини або шліфувальної машини. На фіг. 1 показано, як циліндр вставлений між парою затискачів, верхньою вимірювальною губою 13 і нижньою вимірювальною губою 14, які можуть рухатись в напрямку одна до одної або в напрямку одна від одної відносно проміжної нерухомої структури 15. Слід зазначити, що ці рухомі деталі не мають своєї привідної системи, тому вони приводяться в рух безпосередньо комбінацією зусилля, яке привідна система рухомої деталі 62 прикладає до циліндра, який вимірюють, і особливої форми вимірювальних губ, в яких використовується принцип скошеної поверхні. Цей рух разом з геометричними формами системи дозволяє циліндру 11 завжди мати три обмежені контактні точки або області з пристроєм згідно винаходу, як для циліндра 11, який має певні розміри (фіг.1), так і для циліндра 11, який має мінімальні розміри (фіг.2). Два затискачі 13 і 14 мають похилі контактні поверхні 19 і 20 для контакту з циліндром 11, нахилені у протилежних напрямках згідно V-подібного розміщення, так, що обмежені точки або області контакту з циліндром 16 (верхня точка) і 17 (нижня точка) ковзають уздовж похилих поверхонь 19 і 20 залежно від діаметра циліндра. Таке розміщення також дозволяє циліндру одночасно мати контакт з фіксованою точкою або обмеженою областю 18 поверхні 21 нерухомої проміжної структури 15, розміщеної між двома губами 13 і 14. V-подібне розміщення передбачає, що контактні поверхні 19 і 20 утворюють між собою фіксований кут, навіть якщо вони рухаються в напрямку одна від одної або в напрямку одна до одної. Тому пристрій згідно винаходу передбачає, що додатково до трьохточкового вимірювання дві контактні точки є рухомими, тобто точки 16 і 17, визначені на контактних поверхнях 19 і 20 вимірювальних губ 13 і 14, і одна контактна точка є фіксованою, тобто точка 18 поверхні 21 нерухомої проміжної структури 15. Згідно способу, який є предметом винаходу, три точки 16, 17 і 18 завжди повинні бути в контакті з поверхнею циліндра 11 в ході всіх етапів вимірювання при нерухомому циліндрі чи при обертанні циліндра. Таким чином підтримуючи контакт між поверхнею 21 і циліндром 11, коли відомий кут нахилу контактних поверхонь 19 і 20 вимірювальних губ 13 і 14, і коли відома відносна відстань між тими ж вимірювальними губами 13 і 14, можна визначити діаметр циліндра 11. Крім того, при ковзанні пристрою вздовж осі циліндра можна виявити профіль твірної самого циліндра. Нарешті, обертанням циліндра 11 виявляють ексцентриситет і помилки в округлості частини циліндра, яка відповідає вимірювальним точкам пристрою. Вказані вище результати отримують шляхом обробки даних, отриманих від вимірювального приладу, за відповідними алгоритмами. Таким чином можуть бути встановлені коректні геометричні форми обстежуваного циліндра. Крім того, це неперервне обстеження робить можливим безперервно вести відповідну активацію шліфувального круга шліфувальної машини для відновлення бажаних геометричних параметрів циліндра, який обстежують. Тому пристрій, який може бути застосований для широкого ряду діаметрів циліндрів: від "найменшого" (такого як прокатний стан Сендзіміра) до найбільших, функціонує одночасно з процесом шліфування, має просту конструкцію і гарантує точність, необхідну для контролю процесу в реальному часі. Крім того, цей винахід може бути легко застосований на спеціальному шасі, розміщеному в позиції, діаметрально протилежній шліфувальному кругу, і яке ковзає на додатковій основі, таке 2 UA 109263 C2 5 10 15 20 25 30 35 40 45 50 55 рішення дозволяє вимірювальному пристрою працювати незалежно від візка тримача шліфувального круга. Нижче будуть описані деякі деталі реалізації, які забезпечують отримання характеристик предмету цього винаходу. Всі механізми, які дозволяють визначати геометричні параметри циліндра 11, розміщені всередині нерухомої структури 15. Більш точно, згідно варіанту реалізації верхній кронштейн 33 і нижній кронштейн 33 ковзають в його внутрішню частину завдяки лінійним направляючим. Рух двох кронштейнів 32 і 33 відбувається синхронно і в протилежних напрямках, тобто коли верхній кронштейн 32 рухається вгору, нижній кронштейн 33 рухається вниз і навпаки. Ця специфічна властивість руху двох кронштейнів 32, 33 забезпечена з'єднанням за допомогою тросу або дроту або системи шківів. Засоби, за допомогою яких здійснюється з'єднання між верхнім кронштейном 32 і нижнім кронштейном 33 за допомогою тросу або дроту 43 (фіг.4, 5 і 6), є наступними. На верхньому кронштейні 32 з'єднання між дротом 43 і самим кронштейном виконане за допомогою стопора 28, вгвинченого в сам кронштейн, в якому зафіксований дріт 43. Дріт 43 виходить зі стопора 28 і намотаний на шків 29, розміщений у верхній частині нерухомої структури 15. Після половини витка навколо шківа 29 дріт 43 опускається для з'єднання з нижнім кронштейном 33, проходячи через три блоки. Перший блок 35, який не інтегрований з дротом 43, другий блок 36, який інтегрований з нижнім кронштейном 33, але не з дротом 43 так, що останній може вільно проходити через отвір (не показаний) у блоці 36, і третій блок 37, який також не з'єднаний з кронштейном 33, але з'єднаний з дротом 43, утворює завершальний стопор для дроту 43 і точку прикладення реакції пружини 38. Слід зауважити, що верхній край блоку 37 має форму для утримання пружини, забезпечення оптимального позиціонування і, в той же час, забезпечувати стабільність її з'єднання з двома блоками 36 і 37. Також слід відзначити, що рухома деталь або верхній кронштейн і рухома деталь або нижній кронштейн мають різну вагу. Зокрема, верхній кронштейн 32 має більшу вагу, і різниця у вазі між ними здатна піднімати нижній кронштейн 33 так, що коли пристрій перебуває в стані простою, тобто, коли немає циліндра між двома губами 13 і 14, верхня губа опускається і піднімає нижню губу вгору, доки пристрої 52 і 53, встановлені на нижньому кронштейні 33 і на верхньому стопорі 54 відповідно, торкнуться один одного, і система встановиться у стан рівноваги (фіг.10). Правильна робота пристрою означає, що два затискачі 13 і 14 постійно перебувають у контакті з циліндром, який обстежують, також за наявності невеликих відхилень від симетрії профілю самого циліндра, викликаних, наприклад, ексцентриситетом або порушенням круглої форми, що в деяких моментах призводить до того, що відстань між точками контакту (між циліндром і відповідною вимірювальною губою) і теоретична вісь циліндра (або вісь машини або з'єднання центрів, які підтримують циліндр) не будуть точно еквівалентними. Тому необхідно, щоб була вільна взаємодія між двома вимірювальними губами, властивість, яка не може бути забезпечена простим з'єднанням зі шківом і тросом. Отже, для того, щоб дозволити малі варіації або мікроваріації позиції нижнього затискача 14 відносно верхнього затискача 13, нижній кронштейн 33 (і з'єднана з ним вимірювальна губа) підштовхується вгору пружиною 38, описаною вище. В ході активації вимірювального пристрою попереднє навантаження пружини 38 виставляється зміщенням позиції центральної лінії пристрою 12 відносно теоретичної осі циліндра 11 у вертикальному напрямі згідно наступного визначення: коли пристрій 12 наближається до циліндра 11 завдяки управлінню рухомого кронштейна 62, нижня вимірювальна губа 14 торкається циліндра раніше, ніж верхня вимірювальна губа, викликаючи зміщення униз нижнього кронштейна 33, з'єднаного з нею, що призводить до стискання пружини 38. Вказане вище відхилення вираховується так, що верхня вимірювальна губа торкається поверхні циліндра доки наявне попереднє навантаження пружини 38 (яке дорівнює добутку ходу відхилення на коефіцієнт еластичності пружини) перевищує вагу верхньої рухомої частини, зокрема, система розрахована так, що пружина дозволяє подальше попереднє навантаження в ході роботи системи, і таким чином, подальше відносне дистанціонування двох кронштейнів 32, 33, доки вказане попереднє навантаження стане рівним вазі верхньої рухомої частини, викликаючи її відокремлення від циліндра. Таким чином, постійний контакт двох вимірювальних губ з циліндром досягається чисто механічним способом за допомогою простого і надійного пристрою. Цей пристрій за наявності малих відхилень або мікровідхилень між відстанню між контактними точками між вимірювальними губами і теоретичною віссю самого циліндра працює наступним чином: 3 UA 109263 C2 5 10 15 20 25 30 35 40 45 50 55 a) Якщо верхня контактна точка рухається в напрямку центру: верхній кронштейн опускається під дією сили земного тяжіння, і натяжіння дроту стискає пружину 38 на величину, еквівалентну розглянутому зміщенню. Це зміщення викликає збільшення попереднього навантаження пружини, для правильної роботи пристрою важливо, щоб сила ваги верхнього кронштейна була здатна створити це додаткове попереднє навантаження, інакше не буде контакту між верхньою вимірювальною губою і циліндром (фіг.11). b) Якщо верхня контактна точка рухається від центру: верхній кронштейн піднімається, оскільки його штовхає профіль циліндра, наступна втрата натяжіння дроту компенсується розтисканням пружини (тобто, втратою її попереднього навантаження), яке дорівнює вказаному зміщенню. Завдяки особливостям конструкції пристрій може компенсувати такий тип зміщення, доки вихідне попереднє навантаження пружини не стане нульовим, від цієї точки немає контакту між нижньою губою і циліндром (фіг.12). c) Якщо нижня контактна точка рухається до центру: нижній кронштейн піднімається, щоб утримати контакт з циліндром, оскільки його штовхає пружина 38, яка розвантажена на величину, яка дорівнює розглянутому зміщенню. Пристрій може компенсувати цей тип зміщення, доки вихідне попереднє навантаження пружини не стане нульовим, від цієї точки немає контакту між нижньою вимірювальною губою і циліндром (фіг.13). d) Якщо нижня контактна точка рухається від центру: нижній кронштейн опускається, тисне на пружину і збільшує попереднє навантаження. Правильна робота пристрою гарантується доти, доки попереднє навантаження пружини не досягає значень, які викликають від'єднання верхнього затискача від циліндра (фіг.14). Іншою перевагою вільної взаємодії між двома вимірювальними губами, описаними вище, є те, що система може досконало виконувати свої функції також при наявності невеликої неспівосності між віссю циліндра і віссю пристрою, предмета цього винаходу, викликаної, наприклад, допусками конструкції і складання самого пристрою і машини, на якій він встановлений. Компоненти вимірювального пристрою, до складу яких входять оптична лінія 49 і зчитувальний пристрій 50, також встановлені на двох кронштейнах 32, 33. Оптична лінія 49 встановлена на нижньому кронштейні 33, а зчитувальний пристрій 50 розміщений в супорті 58, встановленому на верхньому кронштейні 32. Оптична лінія 49 – лінія інкрементного типу, тобто вона вимірює відносне зміщення між двома кронштейнами, але не може визначити абсолютне значення відстані між двома вимірювальними губами 13 і 14. Для отримання опорної точки, яка представляє нуль системи, опорний рівень 52 встановлений на нижньому кронштейні 33 і опорний рівень 53 – на верхньому стопорі 54 (який встановлений на верхньому кронштейні 32). Таким чином, оскільки деталі 52 і 53 перебувають у контакті, коли вимірювальний пристрій не працює (фіг.10), тобто коли між двома вимірювальними губами немає циліндра, при кожному початку роботи пристрою реєструється відносне положення між оптичною лінією і зчитувальним пристроєм, яке визначає нуль вимірювальної системи. Одначе, слід зауважити, що при першому початку роботи системи необхідно виміряти діаметр зразкового циліндра, це вимірювання використовується для присвоєння опорного значення нульовому положенню, описаному вище, і яке використовується для виконання вимірювань. Для захисту пристроїв, які містять всередині нерухому частину 15, від проникнення рідини і уникнення осаду встановлені дві гофровані трубки: верхня 56 і нижня 57, які з'єднані з верхнім стопором 54 і нижнім стопором 55 відповідно. Крім того, для покращення ущільнення цих двох гофрованих трубок всередину структури 15 закачане повітря під незначним тиском, який утворює вхідний бар'єр для проникнення забруднення. Коротко робота всього пристрою 12 є наступною. У неробочому стані рухома частина 62 пристрою (як показано на фіг.3) вставлена в нерухому структуру 60, інтегровану з супортом вимірювального пристрою або шліфувальної машини, а два кронштейни 32 і 33 тіла пристрою або вимірювального пристрою знаходяться в кінцевій точці, деталь 52 нижнього кронштейна контактує з деталлю 53 верхнього кронштейна. Для виконання вимірювання рухома частина 62, з якою інтегрований пристрій 12, вимірювального пристрою рухається в напрямку циліндра 11, доки поверхня 20 нижнього затискача 14 торкнеться циліндра 11 (фіг.7). Рухомий кронштейн 62 продовжує рухатись в напрямку до циліндра 11 і, завдяки похилій поверхні 20 затискача 14, викликає зміщення вниз нижнього кронштейна 33, який визначає попереднє навантаження пружини 38, як вже говорилось, це попереднє навантаження менше, ніж вага верхнього кронштейна. 4 UA 109263 C2 5 10 15 20 25 Як було описано вище, таким чином забезпечується неперервний контакт між двома вимірювальними губами 13, 14 і циліндром також і при наявності нерівностей (асиметричності) циліндра. Кронштейн 62 вимірювального пристрою продовжує рухатись вперед, доки верхня вимірювальна губа 13 також входить в контакт з циліндром через поверхню 19 (фіг.8), повторюємо, що геометрія системи розроблена так, що коли верхня вимірювальна губа 13 торкається циліндра 11, пружина 38 може в деякій мірі ще мати попереднє навантаження без суми сил, викликаних від'єднанням верхнього затискача 13 від циліндра 11. V-подібна форма вимірювальних губ вимірювального пристрою забезпечує те, що коли вимірювальний пристрій рухається вперед до циліндра 11, верхній кронштейн 32 і нижній кронштейн 33 рухаються відповідно вгору і вниз. Рух кронштейна 62 вимірювального пристрою в напрямку циліндра 11 продовжується доти, доки поверхня 21 нерухомої частини 15 тіла вимірювального пристрою увійде в контакт з циліндром 11 (фіг.9), утворюючи центральну контактну точку 18 і, в той же час, механічно зупиняючи рух кронштейна 62 без допомоги інших електромеханічних пристроїв контролю позиціонування. Таким чином, між вимірюваним пристроєм 12 і циліндром 11 утворені три контактні точки: підтримуючи ці контактні точки і обертаючи циліндр 11 визначають геометрію (ексцентриситет, округлість) частини циліндра відповідно до вимірювальних губ за допомогою відповідних алгоритмів. При тій же конфігурації, але утримуючи циліндр нерухомим можна, навпаки, визначити абсолютний діаметр циліндра 11. Утримуючи циліндр нерухомим і переміщуючи вимірювальний пристрій по всій довжині поверхні циліндра можна визначити профіль твірних самого циліндра. В кінці вимірювання рухомий кронштейн 62 вимірювального пристрою повертається в неробоче положення і верхній кронштейн опускається, доки не досягне неробочого положення під дією власної ваги. Опускання верхнього кронштейна викликає одночасний підйом нижнього кронштейна. Таким чином досягається мета, вказана в преамбулі опису. Звичайно, можуть бути численні варіанти реалізації пристрою згідно винаходу. Рамки винаходу визначаються формулою винаходу. 30 ФОРМУЛА ВИНАХОДУ 35 40 45 50 55 1. Пристрій для визначення геометрії робочих циліндрів, зокрема, під час їх шліфування, який містить: пару затискачів (13, 14), виконаних з можливістю рухатись в напрямку один від одного або в напрямку один до одного відносно проміжної нерухомої структури (15), затискачі (13, 14) мають поверхні (19, 20), нахилені в протилежних напрямках так, що вони відхиляються одна від одної відносно циліндра (11), геометрію якого вимірюють, причому затискачі виконано так, що циліндр розміщується між ними і між поверхнею (21) нерухомої проміжної структури (15), причому поверхні (19, 20) затискачів (13, 14) і поверхня (21) нерухомої проміжної структури (15) завжди перебувають в контакті з циліндром (11), незалежно від того чи знаходиться циліндр в статичному стані, чи обертається, нерухома структура (15) має у своїй внутрішній частині частини групи, які взаємодіють одна з одною (32, 33; 29, 43; 28, 35, 36, 3738) , для кореляції руху затискачів (13, 14), група має верхні рухомі стрижні або частини (32) і нижні рухомі стрижні або частини (33), що несуть затискачі (13, 14) і з'єднані для синхронного руху в протилежних напрямках за допомогою тросової або дротової системи (43) і шківа (29), і верхній і нижній рухомі стрижні або частини мають різну вагу, а саме верхній рухомий стрижень або частина (32) має більшу вагу, ніж нижній рухомий стрижень або частина (33), і різниця у вазі між ними дозволяє піднімати нижній рухомий стрижень або частину (33). 2. Пристрій для визначення геометрії робочих циліндрів, зокрема, під час їх шліфування, який містить: пару затискачів (13, 14), виконаних з можливістю рухатись в напрямку один від одного або в напрямку один до одного відносно проміжної нерухомої структури (15), затискачі (13, 14) мають поверхні (19, 20), нахилені в протилежних напрямках так, що вони відхиляються одна від одної відносно циліндра (11), геометрію якого вимірюють, причому затискачі виконано так, що циліндр розміщується між ними і між поверхнею (21) нерухомої проміжної структури (15), 5 UA 109263 C2 5 10 15 20 25 30 35 40 45 50 55 причому поверхні (19, 20) затискачів (13, 14) і поверхня (21) нерухомої проміжної структури (15) завжди перебувають в контакті з циліндром (11), незалежно від того чи знаходиться циліндр в статичному стані, чи обертається, нерухома структура (15) має у своїй внутрішній частині частини групи, які взаємодіють одна з одною (32, 33; 29, 43; 28, 35, 36, 37, 38) для кореляції руху затискачів (13, 14), група має верхні рухомі стрижні або частини (32) і нижні рухомі стрижні або частини (33), що несуть затискачі (13, 14) і з'єднані для синхронного руху в протилежних напрямках за допомогою тросової або дротової системи (43) і шківа (29), і тросова або дротова система (43) і шків (29) має кінець дроту (43) прикріпленого до стопора (28), прикріпленого до верхнього стрижня (32), причому дріт (43) намотано на шків (29), розміщений у верхній частині нерухомої структури (15), після намотки половини витка навколо шківа (29) і опускання для з'єднання із нижнім стрижнем (33), і дріт пропущено крізь перший блок (35), невід'ємний від дроту (43), але не від нижнього стрижня (33), другий блок (36), невід'ємний від нижнього стрижня (33, але не від дроту (43), який вільно проходить крізь отвір блока (36), і третій блок (37), невід'ємний від іншого кінця дроту (43), утворюючи кінцевий стопор і точку прикладення реакції для попередньо навантаженої пружини (38), яка забезпечує постійний контакт між верхнім затискачем (13), нижнім затискачем (14) і циліндром (11). 3. Пристрій за п. 2, виконаний з можливістю використання при різних відстанях між точкою контакту між циліндром (11) і верхнім затискачем (13) і теоретичною віссю циліндра і точкою контакту між циліндром (11) і нижнім затискачем (14) і віссю циліндра. 4. Спосіб для визначення геометрії робочих циліндрів, зокрема, під час їх шліфування, який полягає в тому, що циліндр (11), який підлягає відновленню, розміщують у пристрої, який має пару затискачів (13, 14), а саме верхній затискач і нижній затискач, виконаних з можливістю рухатись в напрямку один від одного або в напрямку один до одного відносно проміжної нерухомої структури (15), створюють у затискачів (13, 14) поверхні (19, 20), нахилені в протилежних напрямках так, що вони відхиляються одна від одної відносно циліндра (11) для його розміщення між затискачами і між поверхнею (21) нерухомої проміжної структури (15), та утримують поверхні (19, 20) затискачів (13, 14) і поверхню (21) нерухомої проміжної структури (15) завжди в контакті з циліндром (11) незалежно від того чи знаходиться циліндр в статичному стані, чи обертається, створюють у внутрішній частині проміжної нерухомої структури (15) частини групи (32, 33; 29, 43; 28, 35, 36, 37, 38), які взаємодіють між собою і викликають рух затискачів (13, 14), встановлених на верхньому (32) і нижньому (33) стрижнях, причому стрижні (32, 33) рухають синхронно в протилежних напрямках і верхній та нижній стрижні (32, 33) мають різну вагу, а саме верхній стрижень (32) має більшу вагу, ніж нижній стрижень (33), і різниця у вазі між ними дозволяє піднімати нижній стрижень (33) за наявності зменшення діаметра циліндра (11), точка (16) контакту між верхнім затискачем (13) і циліндром (11) забезпечується зміщенням угору верхнього стрижня (32) внаслідок контакту між затискачем (13) і циліндром, причому зміщення верхнього стрижня (32) викликає однакове і протилежне зміщення нижнього кронштейна (33), викликане приєднанням за допомогою дроту (43) пружини (38) і різниці у вазі, так що ці обидва затискачі (13, 14) завжди знаходяться у контакті з циліндром (11). 5. Спосіб за п. 4, в якому під час руху верхньої точки контакту до центрального напрямку верхній стрижень опускається під дією сили тяжіння, і натяг дроту стискає пружину (38) на величину, що дорівнює зміщенню, яке враховують, причому це зміщення викликає збільшення попереднього навантаження пружини (38), сила ваги верхнього стрижня здатна викликати її попереднє навантаження, таким чином завжди забезпечуючи контакт двох затискачів (13, 14) з циліндром (11). 6. Спосіб за п. 4, в якому під час руху верхньої точки контакту від центру верхній стрижень піднімається, оскільки його штовхає профіль циліндра, результуюче послаблення натягу дроту компенсується розтягненням пружини (38), тобто втратою попереднього навантаження пружини, що дорівнює зміщенню, яке враховують, причому пристрій є здатним компенсувати зміщення такого типу, доки початкове попереднє навантаження пружини (38) не дорівнюватиме нулю, таким чином завжди забезпечуючи контакт двох затискачів (13, 14) з циліндром (11). 7. Спосіб за п. 4, в якому під час руху нижньої точки контакту до центру нижній стрижень піднімається для підтримання контакту з циліндром, оскільки його штовхає пружина (38), розвантажена на величину, що дорівнює зміщенню, яке враховують, причому пристрій компенсує зміщення такого типу, доки початкове попереднє навантаження пружини (38) не 6 UA 109263 C2 5 10 15 20 25 дорівнюватиме нулю, таким чином завжди забезпечуючи контакт двох затискачів (13, 14) з циліндром (11). 8. Спосіб за п. 4, в якому під час руху нижньої точки контакту від центру нижній стрижень опускається, стискаючи пружину (38), відповідно збільшуючи попереднє навантаження, причому правильна робота пристрою забезпечується доти, доки попереднє навантаження пружини не досягне значень, за яких відбувається від'єднання верхнього затискача від циліндра і тому завжди забезпечується контакт двох затискачів (13, 14) з циліндром (11). 9. Спосіб для визначення геометрії робочих циліндрів, зокрема, під час їх шліфування, який полягає в тому, що циліндр (11), який підлягає відновленню, розміщують у пристрої, який має пару затискачів (13, 14), а саме верхній затискач і нижній затискач, виконаних з можливістю рухатись в напрямку один від одного або в напрямку один до одного відносно проміжної нерухомої структури (15), створюють у затискачів (13, 14) поверхні (19, 20), нахилені в протилежних напрямках одна до одної відносно циліндра (11), для його розміщення між затискачами і між поверхнею (21) нерухомої проміжної структури (15), та утримують поверхні (19, 20) затискачів (13,14) і поверхню (21) нерухомої проміжної структури (15) завжди в контакті з циліндром (11) незалежно від того чи знаходиться циліндр в статичному стані, чи обертається, створюють у внутрішній частині проміжної нерухомої структури (15) частини групи (32, 33; 29, 43; 28, 35 З6, 37, 38), які взаємодіють між собою і викликають рух затискачів (13 14), встановлених на верхньому (32) і нижньому (33) стрижнях, причому стрижні (32, 33) рухають синхронно в протилежних напрямках і верхній та нижній стрижні (32, 33) мають різну вагу, а саме верхній стрижень (32) має більшу вагу, ніж нижній стрижень (33), і різниця у вазі між ними дозволяє піднімати нижній стрижень (33), за наявності збільшення діаметра циліндра (11), точка (16) контакту між верхнім затискачем (13) і циліндром (11) забезпечується зміщенням угору верхнього стрижня (32) внаслідок контакту між затискачем (13) і циліндром, причому зміщення верхнього стрижня (32) викликає однакове і протилежне зміщення нижнього кронштейна (33), викликане приєднанням з допомогою дроту (43) пружини (38) і різниці у вазі, так що ці обидва затискачі (13,14) завжди знаходяться у контакті з циліндром (11). 30 7 UA 109263 C2 8 UA 109263 C2 9 UA 109263 C2 10 UA 109263 C2 11 UA 109263 C2 12 UA 109263 C2 13 UA 109263 C2 Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 14
ДивитисяДодаткова інформація
Автори англійськоюAndersson, Thomas, Gaboardi, Paolo, Giucolsi, Massimiliano, Porta, Fabrizio
Автори російськоюАндерссон Томас, Габоарди Паоло, Гюкользи Массимилиано, Порта Фабрицио
МПК / Мітки
МПК: G01B 3/20, G01B 5/252, G01B 5/20, G01B 5/10
Мітки: вимірювання, пристрій, спосіб, циліндрів
Код посилання
<a href="https://ua.patents.su/16-109263-sposib-i-pristrijj-dlya-vimiryuvannya-cilindriv.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для вимірювання циліндрів</a>
Пристрій для вимірювання зносу гільз циліндрів
Номер патенту: 14950
Опубліковано: 15.06.2006
Автори: Дудчак Віталій Петрович, Кузьменко Анатолій Григорович
МПК: G01B 3/22
Мітки: гільз, циліндрів, вимірювання, зносу, пристрій
Формула / Реферат:
1. Пристрій для вимірювання зносу гільз циліндрів, який включає індикаторний нутромір, який відрізняється тим, що додатково містить тригранну перевірочну лінійку і затискачі.2. Пристрій для вимірювання зносу гільз циліндрів за п. 1, який відрізняється тим, що на регулюючому стержні індикаторного нутроміра виконано паз по радіусу під кутом 60° на глибину 1,0-1,5 мм.
Пристрій для осьового переміщення розтиральних циліндрів друкарських машин

Номер патенту: 62391
Опубліковано: 15.12.2003
Автори: Никифорук Богдан Васильович, Бабінець Василь Михайлович, Гук Ігор Богданович, Верхола Михайло Іванович
МПК: B41F 31/00
Мітки: розтиральних, машин, циліндрів, переміщення, осьового, друкарських, пристрій
Формула / Реферат:
Пристрій для осьового переміщення розтиральних циліндрів друкарських машин, що включає пазовий кулачок, двоплечі важелі з опорами, який відрізняється тим, що осьове переміщення двох і більше розтиральних циліндрів фарбового апарата друкарських машин забезпечує лише один закріплений на валу формного циліндра пазовий кулачок, у спіралеподібний замкнутий паз якого, що задає закон осьового руху розтиральних циліндрів, встановлені ролики, рухомо...
Пристрій для установлювання і базування в процесі обробки нежорстких циліндрів
Номер патенту: 85602
Опубліковано: 10.02.2009
Автор: Пашков Євгеній Валентинович
МПК: B23B 1/00, B23B 31/00
Мітки: циліндрів, нежорстких, установлювання, пристрій, базування, процесі, обробки
Формула / Реферат:
Пристрій для установлювання і базування в процесі обробки нежорстких циліндрів, що містить шпиндель з вбудованим прапорцевим пневмодвигуном, центрувальний циліндр, що обертається, із спіральною канавкою під кульки, на яких змонтований спіральний розтискний елемент з профільною внутрішньою поверхнею, який відрізняється тим, що спіральний розтискний елемент виконаний трубчастим, тобто забезпечений порожниною, яка сполучена з джерелом тиску, а...
Спосіб кування циліндрів
Номер патенту: 74327
Опубліковано: 25.10.2012
Автор: Жбанков Ярослав Геннадійович
МПК: B21J 5/00
Мітки: спосіб, кування, циліндрів
Формула / Реферат:
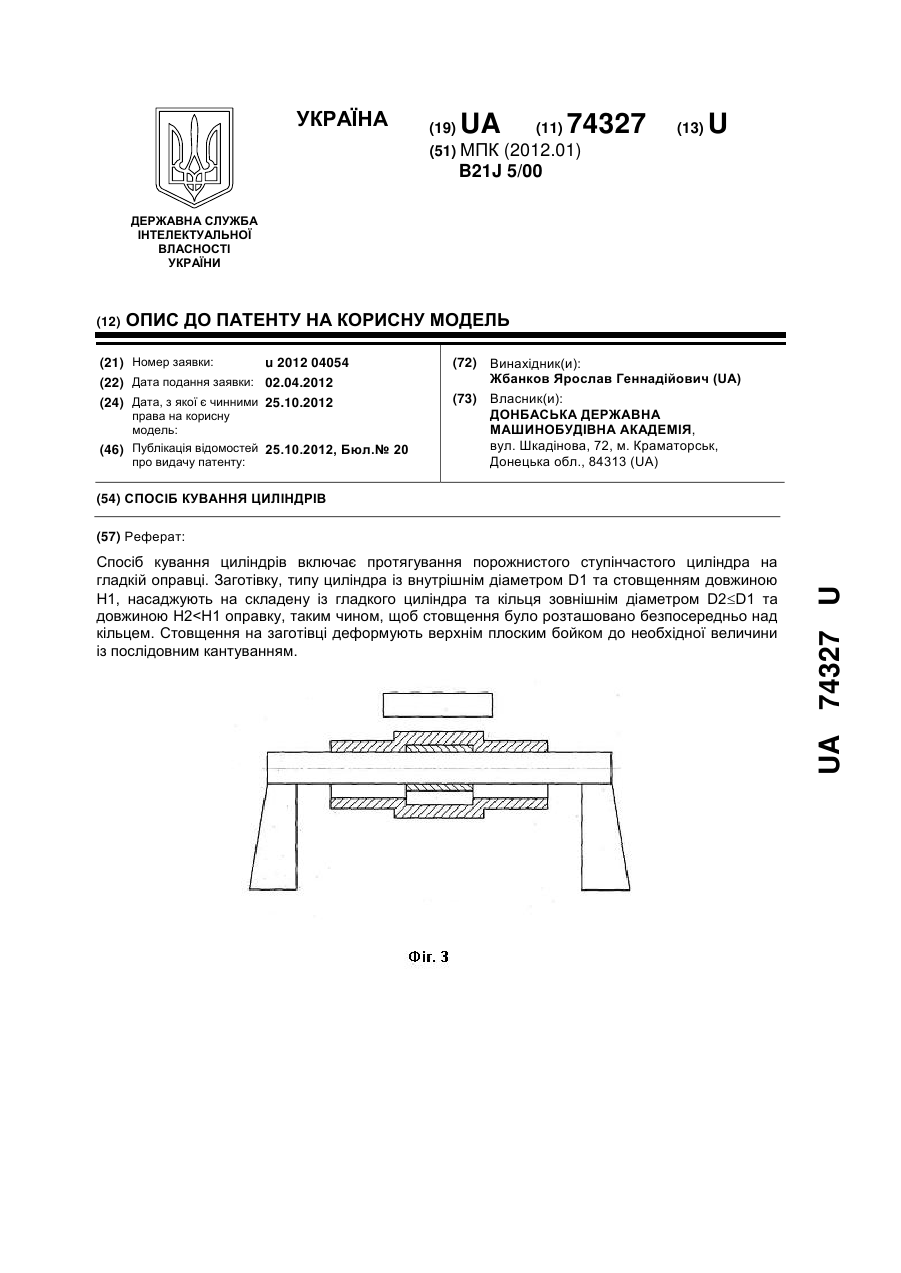
Спосіб кування циліндрів, що включає протягування порожнистого ступінчастого циліндра на гладкій оправці, який відрізняється тим, що заготівку, типу циліндра із внутрішнім діаметром D1 та стовщенням довжиною Н1, насаджують на складену із гладкого циліндра та кільця зовнішнім діаметром D2£D1 та довжиною Н2<Н1 оправку, таким чином, щоб стовщення було розташовано безпосередньо над кільцем, після чого стовщення на заготівці деформують...
Пристрій для розточування ущільнювальних поясків під гільзи блоків циліндрів двигунів
Номер патенту: 69563
Опубліковано: 15.09.2004
Автори: Матвійчук Анатолій Васильович, Гевко Ігор Богданович, Романовська Лілія Михайлівна
МПК: B23B 35/00
Мітки: циліндрів, двигунів, гільзи, ущільнювальних, блоків, поясків, пристрій, розточування
Формула / Реферат:
Пристрій для розточування ущільнювальних поясків під гільзи блоків циліндрів двигунів, який виконаний у вигляді нерухомого і рухомого циліндричного корпусів, кріпильних елементів, фланця, циліндричного конуса, який є у взаємодії з торцями розточувальних різців, який відрізняється тим, що по зовнішньому діаметру фланець виконаний конусним і є у взаємодії з відповідним оберненим конусом центрувальної втулки, яка встановлена у блоці циліндра і є...
Попередній патент: Спінений чайний напій і спосіб його приготування
Наступний патент: Пристрій для доставки лікарських речовин, що приводиться в дію долонею руки
Випадковий патент: Спосіб хірургічного лікування рецидивного птозу молочних залоз