Підтримка визначення місцеположення, базованого на супутниках
Номер патенту: 91857
Опубліковано: 10.09.2010
Автори: Валіо Гаррі, Аланен Кіммо, Кяппі Яні, Галіваара Ісмо, Сюрьярінне Ярі
Формула / Реферат
1. Спосіб підтримання базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних, за яким у зазначеному мобільному пристрої:
- приймають допоміжні дані від мережі зв'язку, які містять параметри моделі орбіти, що описують рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника;
- приймають диференційні коригування для зазначених прийнятих параметрів зазначеної моделі орбіти; і
- коригують зазначені прийняті параметри зазначеної моделі орбіти, базуючись на зазначених диференційних коригуваннях.
2. Спосіб за п. 1, в якому зазначена модель орбіти, параметри якої приймаються, є більш точною, ніж зазначена модель орбіти, визначена для базованої на супутниках системи визначення місцеположення.
3. Спосіб за п. 1, за яким додатково оцінюють у зазначеному мобільному пристрої положення зазначеного супутника, базоване на прийнятих параметрах зазначеної моделі орбіти.
4. Спосіб за п. 1, за яким додатково оцінюють положення зазначеного мобільного пристрою у мобільному пристрої з використанням прийнятих параметрів зазначеної моделі орбіти.
5. Спосіб підтримання базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних, за яким:
- отримують у мережі зв'язку параметри моделі орбіти, що описує рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника, і
- забезпечують отриманими параметрами і диференційними коригуваннями для отриманих параметрів як частиною допоміжних даних для базованого на супутниках визначення місцеположення щонайменше один мобільний пристрій, причому диференційні коригування дозволяють мобільному пристрою коригувати зазначені параметри.
6. Спосіб за п. 5, в якому зазначена модель орбіти, параметри якої були отримані, є більш точною, ніж зазначена модель орбіти, визначена для базованої на супутниках системи визначення місцеположення.
7. Спосіб за п. 5, за яким додатково оцінюють у зазначеній мережі зв'язку положення мобільного пристрою, для якого були забезпечені зазначені отримані параметри, з використанням зворотного зв'язку від мобільного пристрою.
8. Спосіб за п. 5, за яким зазначені допоміжні дані передають до конкретного мобільного пристрою за вимогою мобільного пристрою.
9. Пристрій підтримки базованого на супутниках визначення місцеположення зазначеного пристрою з використанням допоміжних даних, який має:
- компонент зв'язку, виконаний з можливістю приймати від мережі зв'язку допоміжні дані, що включають параметри моделі орбіти, яка описує рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення, і диференційні коригування для параметрів зазначеної моделі орбіти, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника, і
- обробний вузол, виконаний з можливістю коригувати зазначені прийняті параметри зазначеної моделі орбіти, базуючись на зазначених диференційних коригуваннях.
10. Пристрій за п. 9, який має обробний компонент, виконаний з можливістю оцінювати положення цього пристрою з використанням прийнятих параметрів зазначеної моделі орбіти.
11 Пристрій за п. 9, в якому модель орбіти, параметри якої приймаються, є більш точною, ніж модель орбіти, визначена для базованої на супутниках системи визначення місцеположення.
12. Пристрій за п. 9, яким є мобільний телефон.
13. Пристрій для підтримки базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних, який має обробний компонент, виконаний з можливістю приймати параметри моделі орбіти, яка описує рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для зазначеної базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника; а також з можливістю забезпечувати отриманими параметрами і диференційними коригуваннями для зазначених прийнятих параметрів як частиною допоміжних даних для базованого на супутниках визначення місцеположення щонайменше один мобільний пристрій , причому диференційні коригування дозволяють мобільному пристрою коригувати зазначені параметри.
14. Пристрій за п. 13, в якому обробний компонент виконаний із додатковою можливістю оцінювати положення мобільного пристрою, для якого забезпечено отримані параметри, з використанням зворотного зв'язку від мобільного пристрою.
15. Пристрій за п. 13, в якому модель орбіти, параметри якої приймаються, є більш точною, ніж модель орбіти, визначена для базованої на супутниках системи визначення місцеположення.
16. Пристрій за п. 13, яким є мережевий сервер або базова станція мережі зв'язку.
17. Машинозчитуваний носій, що містить програмний код, який придатний для підтримання базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних, та який здійснює операції:
- прийому від мережі зв'язку допоміжних даних, які включають параметри моделі орбіти, що описують рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника;
- прийому диференційних коригувань для прийнятих параметрів зазначеної моделі орбіти; і
- коригування прийнятих параметрів моделі орбіти, базуючись на зазначених диференційних коригуваннях.
18. Машинозчитуваний носій, що містить програмний код, який придатний для підтримання базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних та який здійснює операції:
- отримання у мережі зв'язку параметрів моделі орбіти, яка описує рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для зазначеної базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника; і
- забезпечення отриманими параметрами і диференційними коригуваннями для отриманих параметрів як частиною допоміжних даних для зазначеного базованого на супутниках визначення місцеположення щонайменше одного мобільного пристрою, причому зазначені диференційні коригування дозволяють мобільному пристрою коригувати зазначені параметри.
19. Пристрій для підтримання базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних, який має:
- засіб прийому від мережі зв'язку допоміжних даних, які включають параметри моделі орбіти, що описують рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення і прийому диференційних коригувань для прийнятих параметрів моделі орбіти, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для зазначеної базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника;
- засіб для коригування зазначених прийнятих параметрів моделі орбіти, базуючись на зазначених диференційних коригуваннях.
20. Пристрій для підтримання базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних, який має:
- засіб для отримання у мережі зв'язку параметрів моделі орбіти, що описує рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для зазначеної базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника, і
- засіб для забезпечення отриманих параметрів і диференційних коригувань для отриманих параметрів як частини допоміжних даних для базованого на супутниках визначення місцеположення для щонайменше одного мобільного пристрою, причому диференційні коригування дозволяють мобільному пристрою коригувати зазначені параметри.
Текст
1. Спосіб підтримання базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних, за яким у зазначеному мобільному пристрої: - приймають допоміжні дані від мережі зв'язку, які містять параметри моделі орбіти, що описують рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника; - приймають диференційні коригування для зазначених прийнятих параметрів зазначеної моделі орбіти; і - коригують зазначені прийняті параметри зазначеної моделі орбіти, базуючись на зазначених диференційних коригуваннях. 2. Спосіб за п.1, в якому зазначена модель орбіти, параметри якої приймаються, є більш точною, ніж зазначена модель орбіти, визначена для базованої на супутниках системи визначення місцеположення. 3. Спосіб за п.1, за яким додатково оцінюють у зазначеному мобільному пристрої положення зазначеного супутника, базоване на прийнятих параметрах зазначеної моделі орбіти. 4. Спосіб за п.1, за яким додатково оцінюють положення зазначеного мобільного пристрою у мобільному пристрої з використанням прийнятих параметрів зазначеної моделі орбіти. 5. Спосіб підтримання базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних, за яким: 2 (19) 1 3 моделі орбіти, базуючись на зазначених диференційних коригуваннях. 10. Пристрій за п.9, який має обробний компонент, виконаний з можливістю оцінювати положення цього пристрою з використанням прийнятих параметрів зазначеної моделі орбіти. 11. Пристрій за п.9, в якому модель орбіти, параметри якої приймаються, є більш точною, ніж модель орбіти, визначена для базованої на супутниках системи визначення місцеположення. 12. Пристрій за п.9, яким є мобільний телефон. 13. Пристрій для підтримки базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних, який має обробний компонент, виконаний з можливістю приймати параметри моделі орбіти, яка описує рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для зазначеної базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника; а також з можливістю забезпечувати отриманими параметрами і диференційними коригуваннями для зазначених прийнятих параметрів як частиною допоміжних даних для базованого на супутниках визначення місцеположення щонайменше один мобільний пристрій , причому диференційні коригування дозволяють мобільному пристрою коригувати зазначені параметри. 14. Пристрій за п.13, в якому обробний компонент виконаний із додатковою можливістю оцінювати положення мобільного пристрою, для якого забезпечено отримані параметри, з використанням зворотного зв'язку від мобільного пристрою. 15. Пристрій за п.13, в якому модель орбіти, параметри якої приймаються, є більш точною, ніж модель орбіти, визначена для базованої на супутниках системи визначення місцеположення. 16. Пристрій за п.13, яким є мережевий сервер або базова станція мережі зв'язку. 17. Машинозчитуваний носій, що містить програмний код, який придатний для підтримання базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних, та який здійснює операції: - прийому від мережі зв'язку допоміжних даних, які включають параметри моделі орбіти, що описують рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника; - прийому диференційних коригувань для прийнятих параметрів зазначеної моделі орбіти; і - коригування прийнятих параметрів моделі орбіти, базуючись на зазначених диференційних коригуваннях. 91857 4 18. Машинозчитуваний носій, що містить програмний код, який придатний для підтримання базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних та який здійснює операції: - отримання у мережі зв'язку параметрів моделі орбіти, яка описує рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для зазначеної базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника; і - забезпечення отриманими параметрами і диференційними коригуваннями для отриманих параметрів як частиною допоміжних даних для зазначеного базованого на супутниках визначення місцеположення щонайменше одного мобільного пристрою, причому зазначені диференційні коригування дозволяють мобільному пристрою коригувати зазначені параметри. 19. Пристрій для підтримання базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних, який має: - засіб прийому від мережі зв'язку допоміжних даних, які включають параметри моделі орбіти, що описують рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення і прийому диференційних коригувань для прийнятих параметрів моделі орбіти, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для зазначеної базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника; - засіб для коригування зазначених прийнятих параметрів моделі орбіти, базуючись на зазначених диференційних коригуваннях. 20. Пристрій для підтримання базованого на супутниках визначення місцеположення мобільного пристрою з використанням допоміжних даних, який має: - засіб для отримання у мережі зв'язку параметрів моделі орбіти, що описує рух відповідного супутника конкретної базованої на супутниках системи визначення місцеположення, причому зазначені параметри мають формат, відмінний від формату параметрів моделі орбіти, визначеного для зазначеної базованої на супутниках системи визначення місцеположення, або такий, що походить від іншого джерела, відмінного від широкомовних даних супутника, і - засіб для забезпечення отриманих параметрів і диференційних коригувань для отриманих параметрів як частини допоміжних даних для базованого на супутниках визначення місцеположення для щонайменше одного мобільного пристрою, причому диференційні коригування дозволяють мобільному пристрою коригувати зазначені параметри. 5 Винахід стосується способів підтримки базованого на супутниках визначення місцеположення мобільного засобу за наявності допоміжних даних і з використанням цих допоміжних даних. Винахід стосується також елементів мережі зв'язку, призначених для підтримки базованого на супутниках визначення місцеположення мобільного засобу з використанням допоміжних даних. Крім того, винахід стосується систем, що мають у складі такі елементи мережі і такі мобільні засоби, а також відповідних програмних кодів і програмних продуктів. У наш час існують дві працюючі базовані на супутниках системи визначення місцеположення американська система GPS (Глобальна система визначення місцеположення) і російська система GLONASS (Глобальна орбітальна навігаційна супутникова система). У майбутньому має з'явитись ще Європейська система GALILEO. Загальною назвою цих систем є GNSS (Глобальна навігаційна супутникова система). Для GPS, наприклад, більше 20 супутників (їх також називають космічними носіями -SV) рухаються по орбітах навколо Землі. Кожний з цих супутників передає два сигнали-носії L1 і L2. Один з цих сигналів-носіїв, L1, використовується для навігаційних повідомлень і кодових сигналів стандартної служби визначення місцеположення (SPS). Фаза носія L1 модулюється у кожному супутнику різними кодами С/А (Грубого виявлення). Таким чином, для передач різними супутниками використовуються різні канали. Код С/А є псевдорандомізованим шумовим кодом (PRN), спектр якого охоплює номінальну ширину смуги частот 20,46МГц і повторюється кожні 1023 біт з періодом дискретизації 1мс. Біти коду С/А також називають чіпами. Несуча частота L1 модульована навігаційною інформацією з бітовою швидкістю 50біт/с. Навігаційна інформація включає, зокрема, часову мітку, що вказує час передачі і параметри ефемериди і альманаху. Параметри ефемерид і альманаху GPS є, головним чином, орбітальними параметрами супутника для короткотермінової поліноміальної орбітальної моделі справжньої траєкторії супутника. Ці параметри обслуговуються і оновлюються сервером контролю GPS і потім оновлюються на супутниках. Алгоритм, базований на параметрах ефемерид або альманаху може дати оцінку положення супутник для будь-якого часу, поки супутник знаходиться у відповідному визначеному секторі. Поліноміальні моделі орбіти мають лише одну ступінь свободи, а саме, час. Часовою базою для параметрі ефемерид і альманаху є час GPS, а саме, час тижня GPS (TOW). Обчислення положення супутник є, по суті, екстраполяцією положення супутника на орбіті у функції часу, базована на відомому положенні. Початкове положення також визначається параметрами даних ефемерид і альманаху. Часова мітка, крім того, вказує, коли супутник займає задане положення на орбіті. Часові мітки називають часом ефемериди (TOE) у параметрах ефемерид і часом придатності (ТОА) у 91857 6 параметрах альманаху. TOE і ТОА входять у склад GPS TOW. Параметри ефемерид взагалі можна використовувати лише протягом 2-4год. для визначення положення супутника, внаслідок доволі короткотермінової придатності. З іншого боку, така короткотермінова придатність дозволяє отримати вищу точність порівняно з довготерміновою придатністю. Можна досягти точності 2-5м. На відміну від цього параметри альманаху можуть бути використані для грубого визначення місцеположення супутника навіть для тижнів, але вони не є придатними для точного фактичного визначення місцеположення внаслідок низької точності, зумовленої довготерміновою придатністю і меншою кількістю параметрів. Дані ефемерид і альманаху широкомовно передаються з супутників GPS у форматі, визначеному у відкритому документі, що визначає контроль інтерфейсу GPS (ICD-GPS200). Всі приймачі GPS мають підтримувати цей формат. Приймач GPS, положення якого має бути визначене, приймає сигнали, передані доступним у даний час супутником, і виявляє і простежує канали, що використовуються різними супутниками, базуючись на різних включених кодах С/А. Для отримання і стеження за сигналом супутника цей сигнал прийнятий радіочастотною частиною (РЧ) приймача GPS спочатку перетворюють у смугу частот модуляції, де міксером видаляють відхилення частоти, зумовлені ефектом Доплера. Після цього сигнал корелюють з екземпляром кодів усіх супутників. Кореляцію можна проводити, наприклад, використовуючи узгоджений фільтр. Значення кореляції когерентно або некогерентно інтегрують і/або для підвищення чутливості виявлення. Значення кореляції, що перевищує поріг, дає код С/А і фазу коду, необхідні для стискання сигналу і отримання таким чином навігаційної інформації. Приймач визначає час передачі коду від кожного супутника, звичайно базуючись на дані у декодованому навігаційному повідомлені і на обчисленні періодів дискретизації і чипів кодів С/А. Час передачі і виміряний час надходження сигналу до приймач дозволяють визначити час, необхідний для проходження сигналу від супутника до приймача. Множення цього часу проходження на швидкість світла дає відстань між приймачем і відповідним супутником. Далі приймач оцінює положення супутника у момент передачі, звичайно базуючись на параметрах ефемериди у декодованих навігаційних повідомленнях. Обчислені відстані і оцінки положення супутників дозволяють обчислити поточне положення приймача, оскільки приймач розташовується не перетинанні відстаней від групи супутників. Подібним чином загальною ідеєю визначення місцеположення GNSS через прийом сигналів супутника приймачем, місцеположення якого має бути визначене, є виміряння часу, потрібного сигналу для проходження від оціненого положення супутника до приймача, обчислення з цього часу проходження відстані між приймачем і відповідним 7 супутник і потім визначення місцеположення приймача, використовуючи додатково оцінки положень супутників. Як вважають, Європейська Супутникова Навігаційна Система Galileo матиме власний ICD. Згідно з ескізним проектом, "L1 band part of Galileo Signal in Space ICD (SIS ICD)", 2005, виконаним групою Galileo Joint Undertaking, Galileo ICD буде близьким до GPS ICD, але не збігатиметься. Дані ефемерид і альманаху Galileo будуть віднесені до часової системи Galileo. Визначення місцеположення GPS може виконуватись у трьох різних режимах визначення місцеположення. Першим режимом є автономне визначення місцеположення, базоване на GPS. Це означає, що приймач GPS приймає сигнали від супутника GPS і обчислює з них його положення без будь-якої додаткової інформації від інших джерел. Другим режимом є підтримане мережею визначення місцеположення мобільної станції, базоване на GPS. У цьому режимі приймач GPS може бути пов'язаний з мобільним пристроєм зв'язку. Приймач GPS може бути вбудований у цей пристрій або бути його додатком. Мобільна мереж зв'язку надає допоміжні дані, які приймає мобільний пристрій і пересилає їх до приймач GPS для поліпшення її ефективності. Наприклад, допоміжними даними можуть бути щонайменше ефемерида, положення і час отримання інформації. Обчислення місцеположення у цьому випадку також здійснюється у приймачі GPS. Третім режимом є визначення місцеположення системою GPS за допомогою мережевої мобільної станції. У цьому режимі приймач GPS також має зв'язок з мобільним пристроєм зв'язку, а мобільна мережа зв'язку через мобільний пристрій зв'язку надає щонайменше допомогу в отриманні даних і часу отримання інформації для приймача GPS для підтримки вимірювань. Результати вимірювань після цього надсилаються через мобільний пристрій зв'язку до мобільної мережі зв'язку, яка обчислює місцеположення. Другий і третій підходи називають підтриманою GPS (A-GPS). Якщо допоміжні дані включають дані про еталонне положення і ефемериду для певного супутника, наприклад, приймач GPS може визначити приблизне положення супутника і рух і, отже, обмежити можливий час проходження сигналу супутника і доплерівську частоту. Маючи межі часу проходження і доплерівської частоти, можна обмежити можливі фази коду, що підлягають перевірці. Допоміжні дані для A-GPS визначено і стандартизовано для всіх стільникових систем зв'язку. Надання допоміжних даних побудовано на спеціальних протоколах стільникової системи зв'язку, а саме, RRLP для GSM, IS-801 для CDMA (паралельний доступ з кодовим ущільненням каналів), RRC для WCDMA і ОМА SUPL. Режим допомоги у мобільних станціях наразі втілено у мережах CDMA США для визначення місцеположення невідкладних викликів. Є багато спільного в усіх стільникових протоколах, наприклад, у режимі підтримки GPS, тобто усі стільникові протоколи підтримують GPS, базовану на мобільних станціях, GPS, що отримує допомогу від мобільних станцій, і автономну GPS. 91857 8 Крім того, всі протоколи мають високу залежність від GPS. Як уже відзначалось, допоміжні дані для A-GPS від стільникової мережі зв'язку можуть включати супутникові навігаційні дані, включаючи дані ефемерид і альманаху GPS. Усі стільникові протоколи для допоміжних даних GPS визначають інформаційні дані ефемерид і альманаху (IE) з дуже невеликими відмінностями. IE для ефемерид і альманахів, визначені у стільникових протоколах, є практично ідентичними визначеним у ICD-GPS200. Таким чином, вони мають ті ж обмеження і очікувану точність, як і дані ефемерид і альманаху, що широкомовно передаються супутниками. Ця відповідність полегшує для приймача GPS використання допоміжних даних при обчисленні місцеположення, оскільки усуває необхідність у перетвореннях або додаткового програмного забезпечення. Крім того, іоносферна модель GPS надсилається через стільникові зв'язки згідно з усіма стільниковими протоколами. Елементи допоміжних даних GPS пов'язані з часом GPS також згідно з усіма стільниковими протоколами. Крім того, допомога в отриманні даних пристосована лише для GPS не може бути використана для обчислення місцеположення у мобільній станції згідно з усіма стільниковими протоколами. Нарешті, всі елементи даних індексовано згідно з сузір'ям супутників GPS згідно з усіма стільниковими протоколами. Хоча і є багато спільного в усіх пов'язаних з GPS стільникових протоколах, існують також відмінності. Це означає, що програмне забезпечення терміналу, що приймає допоміжні дані, має або мати рівень адаптації до стільникових протоколів, або підтримувати лише деякі з стільникових протоколів. Крім того, відмінності у стільникових протоколах, зокрема, між контентами повідомлень, впливають на функціонування A-GPS, а саме, на час до першої фіксації і на чутливість. Ще однією проблемою є те, що для використання параметрів ефемерид або альманаху для точного прогнозування очікуваних фаз коду супутника і доплерівських частот у приймачі GPS для початкового захоплення сигналу допоміжні дані від мережі мають також включати точні допоміжні дані для GPS TOW. У мережах GSM і WCDMA надання точних даних для GPS TOW потребує наявності Вузла Вимірювання Місцеположення (LMU) у кожній стільниковій базовій станції, здатній приймати і оцінювати сигнали GPS. Однак, LMU є дорогими і потребують постійного обслуговування. Крім того, поточні формати даних ефемерид і альманаху у стільникових протоколах базуються на форматах, визначених виключно для GPS. Допоміжні дані є важливими також для Galileo, щоб ефективність Galileo була еквівалентною ефективності A-GPS. Можна чекати, що формат ефемерид Galileo буде відрізнятись від форматів ефемерид і альманаху GPS, і тому формат допоміжних даних GPS не може бути безпосередньо використаний для Galileo. Якщо ефемериди Galileo відрізняються від ефемерид GPS, стільникові стандарти мають бути доповнені інформаційними елементами, специфічними для Galileo, і використання Galileo для визначення місцеположення потребуватиме 9 додаткового програмного забезпечення у приймачах. Крім того, Galileo і GPS можуть мати різну якість обслуговування, тобто дані ефемерид Galileo можуть бути більш точними ніж дані ефемерид GPS, і тоді визначення місцеположення за допомогою Galileo буде більш точним. Крім того, параметри ефемерид Galileo і GPS можуть мати різні довговічності. У такому випадку одночасне оновлення допоміжних даних буде неможливим, але планування оновлення допоміжних даних має бути незалежним для Galileo і GPS. Отже, існують певні проблеми, пов'язані з поточними допоміжними даними GPS. Було запропоновано доповнити елементи допоміжних даних 3GPP GPS для сигналів Galileo шляхом модифікування індексації елементів даних ефемерид таким чином, щоб ця індексація могла включати супутники Galileo супутник. Формат даних ефемерид після цього буде, по суті, однаковим для супутників GPS і Galileo. Завдяки такому рішенню допоміжні дані для GPS і Galileo будуть зведені до обмежень поточних даних ефемерид і альманаху GPS і залишиться потреба у наданні TOW GPS. Поліпшити точність і цілісність моделей орбіти можна використанням корекційних даних. Європейська Служба Геостаціонарного Навігаційного Покриття (EGNOS) і Широкоплощинна Служба Доповнення (WAAS), наприклад, визначають корекційні дані GPS як такі, що ураховують, наприклад, затримки сигналу GPS, викликані атмосферою і іоносферою. Корекційні дані передаються геостаціонарними супутниками і можуть бути прийняті відповідними приймачами GPS і використані для підвищення точності базованого на GPS визначення місцеположення. Крім того для послаблення впливу селективної доступності були введені диференційні корекції для GPS (DGPS). Вони також придатні для усунення атмосферних ефектів і дрейфу положення супутника і годинника. Корекції WAAS, EGNOS і DGPS завжди пов'язані з єдиним набором ефемерид. Коли використовуються довготермінові орбітальні параметри супутника замість нормальних параметрів ефемериди, корекції WAAS, EGNOS і DGPS не можуть бути використані, оскільки вони прив'язані до нормальних даних ефемериди. Винахід пропонує альтернативи звичайному забезпеченню і використанню допоміжних даних для базованого на супутниках визначення місцеположення мобільного засобу. Згідно з першим аспектом винаходу, запропоновано перший спосіб підтримки базованого на супутниках визначення місцеположення мобільного засобу допоміжними даними, згідно з яким мобільний засіб пристосовують до зв'язку з мережею зв'язку і отримання сигналів, переданих супутниками щонайменше однієї базованої на супутниках системи визначення місцеположення. Цей спосіб включає конвертування у мережі зв'язку наявних параметрів спеціалізованої моделі орбіти, яка описує рух супутника і визначена для конкретної базованої на супутниках системі визначення місцеположення, у параметри загальної моделі орбіти, що описує рух супутника. Спосіб також включає 91857 10 підготування конвертованих параметрів як частини допоміжних даних для базованого на супутниках визначення місцеположення. Згідно з першим аспектом винаходу, крім того, запропоновано другий спосіб підтримки базованого на супутниках визначення місцеположення мобільного засобу з використанням допоміжних даних, згідно з яким мобільний засіб пристосовують до зв'язку з мережею зв'язку і отримання сигналів, переданих супутниками щонайменше однієї базованої на супутниках системі визначення місцеположення. Цей спосіб включає прийом у мобільному засобі допоміжних даних від мережі зв'язку, які включають параметри загальної моделі орбіти, яка описує рух супутника. Спосіб, крім того, включає оцінювання положення супутника цієї щонайменше однієї базованої на супутниках системи визначення місцеположення, базоване на прийнятих параметрах загальної моделі орбіти. Крім того, згідно з першим аспектом винаходу, запропоновано мережевий елемент для мережі зв'язку, призначений для підтримки базованого на супутниках визначення місцеположення мобільного засобу з використанням допоміжних даних, причому мобільний засіб пристосовують до зв'язку з мережею зв'язку і до отримання сигналів, переданих супутниками щонайменше однієї базованої на супутниках системі визначення місцеположення. Цей мережевий елемент включає засіб обробки, адаптований конвертувати наявні параметри спеціалізованої моделі орбіти, яка описує рух супутника і визначена для конкретної базованої на супутниках системі визначення місцеположення, у параметри загальної моделі орбіти, яка описує рух супутника. Засіб обробки, крім того, пристосовано для підготування конвертованих параметрів як частини допоміжних даних для базованого на супутниках визначення місцеположення. Згідно з першим аспектом винаходу, запропоновано також мобільний засіб, який використовує допоміжні дані для підтримки базованого на супутниках визначення місцеположення цього мобільного засобу і має у складі приймач сигналу супутника, адаптований отримувати сигнали, передані супутниками щонайменше однієї базованої на супутниках системі визначення місцеположення. Цей мобільний засіб, крім того, включає компонент зв'язку, пристосований приймати від мережі зв'язку допоміжні дані з параметрами загальної моделі орбіти, яка описує рух супутника. Цей мобільний засіб також включає засіб обробки, пристосований оцінювати положення супутника щонайменше однієї базованої на супутниках системі визначення місцеположення, базуючись на прийнятих параметрах загальної моделі орбіти. Згідно з першим аспектом винаходу, запропоновано також систему, яка включає запропонований мережевий елемент першого аспекту винаходу і запропонований мобільний засіб першого аспекту винаходу. Згідно з першим аспектом винаходу, крім того, запропоновано перший код програмного забезпечення для підтримки базованого на супутниках визначення місцеположення мобільного засобу з використанням допоміжних даних, причому мобі 11 льний засіб пристосовано для зв'язку з мережею зв'язку і для прийому сигналів, переданих супутниками щонайменше однієї базованої на супутниках системи визначення місцеположення. При виконанні обробляючим-вузлом елемента мережі зв'язку цей код програмного забезпечення реалізує перший спосіб першого аспекту винаходу. Крім того, згідно з першим аспектом винаходу, запропоновано перший програмний продукт програмного забезпечення, в якому зберігається код першого програмного забезпечення, запропонований для першого аспекту винаходу. Згідно з першим аспектом винаходу, запропоновано також другий код програмного забезпечення для підтримки базованого на супутниках визначення місцеположення мобільного засобу з використанням допоміжних даних, причому мобільний засіб пристосовано мати зв'язок з мережею зв'язку і приймати сигнали, передані супутниками щонайменше однієї базованої на супутниках системі визначення місцеположення. При виконанні обробляючим вузлом мобільного засобу цей код програмного забезпечення реалізує другий спосіб першого аспекту винаходу. Крім того, згідно з першим аспектом винаходу, запропоновано другий програмний продукт програмного забезпечення, в якому зберігається код другого програмного забезпечення, запропонований для першого аспекту винаходу. Перший аспект винаходу базується на тому, що формат параметрів моделі орбіти, що надаються як допоміжні дані для базованого на супутниках визначення місцеположення, може бути від'єднаний від формату параметрів орбіти, визначених у межах відповідної базованої на супутниках системі визначення місцеположення. У зв'язку з цим запропоновано конвертувати наявні параметри орбіти для певної базованої на супутниках системи визначення місцеположення у параметри загальної моделі орбіти, яка може бути (але не обов'язково) визначена загалом для щонайменше двох базованих на супутниках систем визначення місцеположення. Слід відзначити, що термін "конверсія" включає також переобчислення параметрів для загальної моделі орбіти. Перевагою першого аспекту винаходу є те, що одна модель орбіти може бути використана для допоміжних даних різних базованих на супутниках систем визначення місцеположення. З загальною моделлю орбіти таке використання с точки зору точності може бути досягнуте для всіх підтриманих базованих на супутниках систем визначення місцеположення. Легко можуть бути додані нові базовані на супутниках системи визначення місцеположення. Отже, визначення місцеположення з використанням допоміжних даних, як у A-GNSS, може бути гармонізоване у різних стандартах зв'язку, наприклад, в усіх стільникових стандартах. У мобільних засобах загальна модель орбіти уможливлює, крім того, гібридизацію, наприклад, Galileo-GPS, яка дозволяє мобільним засобам виконувати обчислення місцеположення, базуючись на сигналах супутників GPS і Galileo. Стає можливим також використовувати загальну модель орбіти як єдину модель орбіти для певної базованої на 91857 12 супутниках системи визначення місцеположення, наприклад, замість моделі ефемерид і альманаху GPS, і також як єдину модель орбіти для всіх режимів визначення місцеположення, наприклад, для GNSS з допомогою мобільної станції і GNSS, базованої на мобільній станції. Отже, використання загальної моделі орбіти знижує кількість елементів даних, які необхідно підтримувати у стандартах зв'язку. Розмір і складність програмного забезпечення для визначення місцеположення у мобільному засобі можуть бути мінімізовані у мобільному засобі використанням загальної моделі орбіти, можливо, для приймача гібриду GPS/Galile, що дозволяє обійтись без автономного визначення місцеположення. Тобто у цьому випадку мобільний засіб як такий не має ніякого програмного забезпечення для декодування навігаційних даних супутника, і має лише програмне забезпечення підтримки запропонованої загальної моделі орбіти, хоча таке втілення не є бажаним. Така загальна модель орбіти могла б навіть бути використана додатково для забезпечення допоміжних даних для наземної системи визначення місцеположення. Перевагою першого аспекту винаходу є також те, що уможливлюються зміни у форматі параметрів спеціалізованих моделей орбіти, наприклад, параметрів, визначених у ICD-GPS-200, без введення змін у конвертовані параметри. Отже, інтерфейс між мережею зв'язку і мобільними засобами може залишатись таким же. Має бути адаптоване лише проведення конверсії параметрів. Іншою перевагою першого аспекту винаходу є те, що формат конвертованих параметрів не є пов'язаним з форматом первісних параметрів. Таким чином, конверсія уможливлює надання поліпшених параметрів і цим поліпшує ефективність визначення місцеположення з використанням допоміжних даних. Загальна модель орбіти може включати, наприклад, більше параметрів, ніж спеціалізована модель, або параметри з більшою довжиною слова, ніж відповідні параметри спеціалізованої моделі орбіти. Це дозволяє підвищити точність моделі орбіти і/або часової придатності відповідних параметрів. Якщо модель орбіти є більше точною, більш точним буде визначення місцеположення. Якщо параметри є придатними протягом довшого часу, кількість необхідних оновлень зменшується, а це зменшує витрату ширини смуги частот зв'язку у системі зв'язку. У Jet Propulsion Laboratory (Лабораторії реактивного руху) Каліфорнійського Технологічного Інституту була показана можливість підвищити точність і тривалість дійсності моделей орбіт супутників підвищенням довжини слова в орбітальних параметрах. Міжнародна Служба GPS (IGS) через JPL спільно використовує моделі орбіти високої точності на період 48год. через Інтернет. JPL публікує так звані надшвидкі дані щодо положення на орбіті, які мають дециметрову точність і є дійсними щонайменше протягом +/-24год., тобто на 24год. випереджають поточний час. Дані звичайно мають формат sp3, який містить координати положення супутника і швидкості у структурі ECEF (Фіксація 13 відносно центру Землі), час за годинником і оцінки точності, отримані з певним інтервалом, звичайно 15хвил. Дані надаються для повного сузір'я супутників GPS. Ці дані є непридатними у терміналі для визначення місцеположення як такого, але мають бути використані у моделі, наприклад, поліноміальній, для отримання компактного набору параметрів положення супутника для терміналу і для екстраполяції швидкості у функції часу. У поліноміальній моделі можна використовувати "поліноміальний формат", визначений для даних ефемерид GPS. Моделювання також необхідне для дрейфу годинника супутника. IGS дає точну інформацію також для годинників супутників, які потребують моделювання, наприклад, на поліноміальній моделі. Модель годинника включена у стандартні широкомовні передачі супутника у субструктурі 1 згідно з GPS ICD і включена також у стільникові допоміжні дані. Модель годинника звичайно є частиною ефемериди, але не як власне модель. Global Locate Inc. показала, що можна підвищити точність і довговічність моделей орбіт супутників обчисленням на сумісній з ICD-GPS-200 поліноміальній моделі з використанням критеріїв відповідності, відмінних від тих, що використовуються службою ефемерид супутників GPS у Global Locate Inc. у форматі ICD-GPS-200 у довготерміновій моделі орбіти для повного сузір'я GPS. Довговічність довготермінової моделі може бути значно більшою, ніж довговічність переданих широкомовленням ефемерид. Останнє рішення, однак, ще прив'язане до формату ефемерид GPS. Наявні параметри спеціалізованої моделі орбіти можуть бути, наприклад, переданими ефемеридами або іншими орбітальними даними, наданими сегментом контролю GNSS і/або іншими, зовнішніми джерелами, наприклад, IGS. Загальна модель орбіти може базуватись на кеплерівських орбітах і параметрах, що використовуються для моделей ефемерид і альманаху GPS, але можна також використовувати різні інші репрезентації інформації для моделювання положення супутника. Прикладами є сплайнполіноміальні, ермітові поліноміальні, лінійноламані безперервні поліноміальні репрезентації тощо. Наприклад, поліноміальна модель четвертого порядку може бути прикладена до справжньої орбітальної траєкторії супутника, розміщеної у структурі ECEF. Поліноміальна модель може бути застосована з використанням критерію мінімуму середньоквадратичних відхилень (RMSE). Після цього може бути використана поліноміальна модель для екстраполяції даних положення супутника на майбутній час. Завдяки формату sp3, який включає положення ECEF, швидкість ECEF і точності зсуву/дрейфу годинника (std), дані IGS можуть бути легко використані, наприклад, у поліноміальній моделі, зокрема, сплайн- або ермітовій поліноміальній моделі, завдяки чому поліном добре відображатиме дані положення супутника і його швидкості на період попередніх 24-48год. Запропонована загальна модель орбіти дає більшу свободу у виборі параметрів порівняно з простим використанням "полі 91857 14 номіального формату", визначеного для даних ефемерид GPS. Порядок поліному, кількість параметрів і довжини слова можуть бути обрані згідно з бажаною точністю і очікуваною довговічністю узгодженості моделі. Параметри загальної моделі орбіти, які зрештою надаються як частина допоміжних даних, можуть включати параметри для усього сузір'я супутників певної базованої на супутниках системи визначення місцеположення, для усього сузір'я супутників сукупності базованих на супутниках систем визначення місцеположення, або для одного або більше супутників у сузір'ї залежно від інформаційної здатності мобільного засобу. Підтриману базовану на супутниках систему визначення місцеположення можна вибирати довільно. Це може бути, наприклад, GPS, GLONASS і Galileo, але також EGNOS і WAAS тощо. На додаток до конвертованих параметрів надані допоміжні дані можуть включати, зокрема, еталонний час, наприклад, у формі параметрів моделі годинника, і еталонне положення. Слід відзначити, що загальна модель орбіти на додаток до моделі для даних положення і швидкості супутника також може містити модель для зсуву і дрейфу годинника супутника, еталонний час для ініціалізації, оцінку положення супутника, його швидкості і точності годинника і, можливо, модель орієнтації супутника для остаточної корекції фази при обчисленні пункту точного місцеположення (РРР). Координатна структура для моделі положення і швидкості є переважно структурою ECEF, оскільки корекцію обертання Землі можна легко виконувати у структурі ECEF. Конверсія у локальні структури (East-North-Up) може бути здійснена простим множенням матриць. Дані IGS можуть бути включені у структуру ECEF. Крім того, надані допоміжні дані можуть включати різну іншу інформацію. Прикладами є корекції DGPS, корекції Кінематики Реального Часу (RTK) і вимірювання фази несучої частоти сигналів супутників. Щодо високоточного визначення місцеположення RTK див. WO 2004/000732 А1. Вимірювання фази несучої частоти і еталонні дані RTK, наприклад, придатні для підтримка визначення місцеположення з високою точністю. Зрозуміло, що відомі корекції RTK для GPS можуть бути адаптовані згідно з потребою для підтримки базованого на Galileo визначення місцеположення тощо. Іншими прикладами додаткових допоміжних даних є корекції EGNOS і WAAS. Дані, що широкомовно передаються з геостаціонарних супутників EGNOS і WAAS, важко приймати на високих широтах. Тому ці дані можуть бути надані як мережеві допоміжні дані замість, наприклад, випадку, коли, зокрема, загальна модель орбіти є короткотерміновою моделлю, оскільки поточні корекції EGNOS/WAAS як такі не придатні для довготермінових моделей орбіти. Іншим прикладом додаткових допоміжних даних є короткотермінові диференційні корекції для довготермінової моделі орбіти. Ще одним прикладом додаткових допоміжних даних є параметри моделі іоносфери і/або параметри моделі тропосфери. Подальшим прикладом додаткових допоміжних даних є короткотермінові попередження сто 15 совно цілісності, які можуть надсилатись у випадку раптового виходу супутника з ладу, щоб виключити цей супутник з обчислення місцеположення. Прикладом додаткових допоміжних даних є також біти даних щонайменше однієї базованої на супутниках системи визначення місцеположення, які дозволяють стирати ці дані за вимогою мобільного засобу. Стирання даних є способом підвищення чутливості приймача сигналів супутників. Наприклад, якщо контент даних. GPS є невідомим, можна когерентно інтегрувати сигнали GPS лише для періодів 20мс (1 біт GPS). У випадку, коли біти даних є відомими, когерентне інтегрування сигналу може бути продовжене на декілька біт GPS і дати поліпшення чутливості приблизно 1,5дБ, причому кожного разу час інтегрування подвоюється. Наприклад, при 40мс (2 біти) можна отримати підсилення 1,5дБ, а при 80мс (4 біти) - 3дБ. В одному з втілень винаходу той або інший мережевий елемент мережі зв'язку замінює еталонне значення у конвертованих параметрах, використовуючи час супутників системи визначення місцеположення через еталонне значення, базоване на часі системи зв'язку. Інакше кажучи, загальна модель орбіти посилається лише на час системи зв'язку, і інформація про положення супутника може бути обчислена як функція часу системи зв'язку замість часу, наприклад, GPS або Galileo. Якщо відношення між часами системи GNSS і системи зв'язку є точно відомими, часова база системи зв'язку може бути використана для уможливлення точного прогнозування фази сигналу і прогнозування зсуву Доплера для підвищення чутливості. Залежно від системи зв'язку для часу системи зв'язку можуть бути передбачені опційні поля у допоміжних даних. Інформацією про систему може бути кадр, часова щілина і біт для GSM, номер кадру, щілина і чіп для WCDMA і час КТС для CDMA. Застосування часової щілини і біту або чіпу, відповідно, також у GSM і WCDMA дає достатнє розрізнення. Поля можуть також містити оцінку невизначеності оцінки часу (std) для оцінювання невизначеності прогнозування фази сигналу і доплерівського зсуву. В іншому втілені винаходу загальна модель орбіти використовує дві часові бази, наприклад, час КТС і/або час системи зв'язку. Час КТС забезпечує універсальний еталон часу для всіх систем GNSS і робить можливим оцінювання кількості можливих змін кадр/суперкадр, властивої, наприклад, стільниковим системам. Використання часу КТС може допомогти в усуненні проблем, пов'язаних з можливою різницею часів різних систем GNSS. GPS, Galileo і Glonass мають різні системні часи. Отже, зсув між системними часами має бути відомим, якщо ці системи утворюють гібрид для визначення місцеположення, наприклад, використовуючи один GPS для прогнозування фази сигналів Galileo. Ця проблема усувається базуванням моделі на спільній часові базі, тобто на часі КТС. Відмінності між часами систем GNSS можуть бути компенсовані у моделі годинника. Загальна модель годинника може бути, наприклад, безперервною поліноміальною моделлю другого порядку з 91857 16 трьома параметрами, зсувом, дрейфом і короткими відхиленнями. У цілому вона нагадує модель годинника у поточному GPS ICD. Будь-яка інша модель також може бути використана. Модель годинника може також включати точну або неточну оцінку відхилення годинника. Час КТС може також бути часовою міткою/ідентифікатором моделі орбіти. Допоміжні дані можуть бути передані до конкретного мобільного засобу, зокрема, за вимогою мобільного засобу. В іншому варіанті, однак, вони можуть бути передані широкомовно, наприклад, у відповідній комірці стільникової системи зв'язку. Мобільний засіб після прийому допоміжних даних може оцінити положення супутника через щонайменше одну базовану на супутниках систему визначення місцеположення, використовуючи конвертовані параметри. Згідно з другим аспектом винаходу, запропоновано перший спосіб підтримки базованого на супутниках визначення місцеположення мобільного засобу з використанням допоміжних даних, згідно з яким мобільний засіб пристосовують мати зв'язок з мережею зв'язку і отримувати сигнали передані супутниками щонайменше однієї базованої на супутниках системи визначення місцеположення. Цей спосіб включає заміну у мережі зв'язку еталонного значення, базованого на часі базованої на супутниках системи визначення місцеположення у наявних параметрах моделі орбіти, що описує рух супутник, еталонним значенням, базованим на часі системи зв'язку. Цей спосіб, крім того, включає надання параметрів, включаючи замінене еталонне значення як частину допоміжних даних для базованого на супутникахвизначення місцеположення. Згідно з другим аспектом винаходу, запропоновано також другий спосіб підтримки мобільного засобу, базований на супутниках визначення місцеположення, з використанням допоміжних даних, згідно з яким мобільний засіб пристосовують мати зв'язок з мережею зв'язку і отримувати сигнали, передані супутниками щонайменше однієї базованої на супутниках систем визначення місцеположення. Цей спосіб включає прийом мобільним засобом допоміжних даних від мережі зв'язку, які включають часову мітку, базовану на часі системи зв'язку. Цей спосіб, крім того, включає визначення у мобільному засобі часу системи зв'язку. Спосіб також включає оцінку у мобільному засобі положення супутника щонайменше однієї базованої на супутниках системи визначення місцеположення з використанням параметрів допоміжних даних, базованих на визначеному часі системи зв'язку. Крім того, згідно з другим аспектом винаходу, запропоновано мережевий елемент для мережі зв'язку, призначений для підтримки базованого на супутниках визначення місцеположення мобільного засобу з використанням допоміжних даних, причому цей мобільний засіб пристосовують до зв'язку з мережею зв'язку і до отримання сигналів, переданих супутниками щонайменше однієї базованої на супутниках системі визначення місцеположення. Цей мережевий елемент включає засіб обробки, адаптований заміняти еталонне значен 17 ня, базоване на часі базованої на супутниках системи визначення місцеположення у наявних параметрах моделі орбіти, що описує рух супутника, еталонним значенням, базованим на часі системи зв'язку. Цей засіб обробки також пристосовують готувати параметри, що включають замінені еталонні значення, як частину допоміжних даних для базованого на супутниках визначення місцеположення. Згідно з другим аспектом винаходу, запропоновано також мобільний засіб, який використовує допоміжні дані для підтримки базованого на супутниках визначення місцеположення цього мобільного засобу і має у складі приймач сигналу супутника, пристосований отримувати сигнали, передані супутниками щонайменше однієї базованої на супутниках системи визначення місцеположення. Цей мобільний засіб, крім того, включає компонент зв'язку, пристосований приймати від мережі зв'язку допоміжні дані з часовою міткою, базованою на часі системи зв'язку. Цей мобільний засіб також включає засіб обробки, пристосований визначати час системи зв'язку, і включає засіб обробки, пристосований оцінювати положення супутника щонайменше однієї базованої на супутниках системи визначення місцеположення з використанням у прийнятих допоміжних даних параметрів, базованих на визначеному часі системи зв'язку. Згідно з другим аспектом винаходу, запропоновано також систему, яка включає запропонований мережевий елемент другого аспекту винаходу і запропонований мобільний засіб другого аспекту винаходу. Згідно з другим аспектом винаходу, крім того, запропоновано перший код програмного забезпечення для підтримки базованого на супутниках визначення місцеположення мобільного засобу з використанням допоміжних даних, причому цей мобільний засіб пристосовують мати зв'язок з мережею зв'язку і отримувати сигнали, передані супутниками щонайменше однієї базованої на супутниках системи визначення місцеположення. При виконанні обробляючим вузлом мережевого елемента мережі зв'язку цей код програмного забезпечення реалізує перший спосіб другого аспекту винаходу. Згідно з другим аспектом винаходу, запропоновано також перший програмний продукт першого програмного забезпечення/ в якому зберігається перший код програмного забезпечення, запропонований для другого аспекту винаходу. Крім того, згідно з другим аспектом винаходу, запропоновано другий код програмного забезпечення для підтримки базованого на супутниках визначення місцеположення мобільного засобу з використанням допоміжних даних, причому цей мобільний засіб пристосовують мати зв'язок з мережею зв'язку і отримувати сигнали передані супутниками щонайменше однієї базованої на супутниках системи визначення місцеположення. При виконанні обробляючим вузлом мобільного засобу цей код програмного забезпечення реалізує другий спосіб другого аспекту винаходу. Згідно з другим аспектом винаходу, запропоновано також програмний продукт другого програ 91857 18 много забезпечення, в якому зберігається код другого програмного забезпечення, запропонований для другого аспекту винаходу. Другий аспект винаходу базується на тому, що положення супутників можна оцінити, базуючись на параметрах моделі орбіти і використовуючи час системи зв'язку замість часу базованої на супутниках системи визначення місцеположення. Для здійснення такого оцінювання запропоновано заміняти еталонні значення в наявних параметрах, базованих на часі базованої на супутниках системи визначення місцеположення еталонним значенням, базованим на часі системи зв'язку. Наприклад, у параметрах ефемерид GPS TOE заміщується часом системи зв'язку, а для параметрів альманаху GPS TOA заміщується часом системи зв'язку. Відношення між часом базованої на супутниках системи визначення місцеположення і часом системи зв'язку має бути відомим у мереж зв'язку для заміщення еталонних значень, як це було запропоновано, але, оскільки точність цього часового відношення є не дуже точним, це відношення може бути зроблене доступним для мережі декількома шляхами. Перевагою другого аспекту винаходу є те, що допоміжні дані приготовляються незалежно від часу базованої на супутниках системи визначення місцеположення, а час базованої на супутниках системи визначення місцеположення можна не надавати мобільному засобу. Другий аспект винаходу може бути застосований у будь-якій базованій на супутниках системі визначення місцеположення, яка використовує допоміжні дані, наприклад, у A-GPS або Galileo. Якщо мережею зв'язку є мережа GPS зв'язку, час можна визначати через відповідну комбінацію номера кадру, часової щілини і номера біту. Якщо мережею зв'язку є мережа WCDMA, час може бути визначений через відповідну систему номера кадру, щілини і чіпу. Всі поточні стільникові термінали, наприклад, вже декодують номери кадри. Отже, вже є у наявності придатна часова інформація для обчислення положення супутника, тобто для екстраполяції положення супутників з використанням часу стільникової системи зв'язку. У випадку GPS є легким розповсюдження поточних стільникових GSM і WCDMA. стандартів з стільниковими часовими мітками. У наявності є IE і параметри для передачі точного часу. Ті ж параметри можуть бути додані до ефемерид і альманаху IE для використання замість TOE і ТОА, але з тією ж тимчасовою інформацією і використанням як TOW. Таке рішення є зворотно сумісним. Мобільний засіб може приймати допоміжні дані з заміненим еталонним значенням від мережі зв'язку. Після цього він може визначити час системи зв'язку і оцінити положення супутника щонайменше однієї базованої на супутниках системи визначення місцеположення, використовуючи параметри у допоміжних даних, базовані на часі системи зв'язку. Інформація про положення супутника дозволяє отримувати точні прогнози фаз коду і доплерівських частот прийнятих сигналів супутників, хоча час базованої на супутниках системи ви 19 значення місцеположення на надається мобільному засобу. Після прийому допоміжних даних від мережі зв'язку мобільний засіб може надати мережі зв'язку заздалегідь визначений набір даних зворотного зв'язку за замовчування. В існуючих рішеннях цей набір даних зворотного зв'язку залежить, на відміну від режиму визначення місцеположення, від того чи базується визначення місцеположення на мобільній станції або отримує допомогу від мобільної станції. Дані зворотного зв'язку можуть включати інформацію про положення, наприклад, про визначене положення мобільного засобу, визначену швидкість мобільного засобу, визначений час щонайменше однієї базованої на супутниках системи визначення місцеположення і визначених неточностей вимірювання і/або визначення місцеположення. Дані зворотного зв'язку можуть також включати вимірювання на прийнятих сигналах супутників і/або відношення між часом базованої на супутниках системи визначення місцеположення і часом системи зв'язку. Дані зворотного зв'язку можуть включати також вимірювання Спостереженої Різниці Часів (OTD), виконане на основі сигналів, прийнятих від сукупності базових станцій мережі зв'язку. Мобільний засіб може повертати вимірювання OTD до мережі зв'язку у сек., тобто мкс або нсек, замість різниць у кадрах або субкадрах, для забезпечення незалежності інформації. Для мобільного засобу може бути також необхідним підтримувати відношення між часом щонайменше однієї базованої на супутниках системи визначення місцеположення і часом системи зв'язку. Якщо мобільний засіб отримує фіксацію від GNSS, він може пов'язувати її з поточним часом системи зв'язку, наприклад, в одиницях кадрів, субкадрів, щілин, бітів і чипів, з визначеним часом базованої на супутниках системи визначення місцеположення. В іншому варіанті мобільний засіб може отримувати початкове відношення часів як допоміжні дані. Відношення часів може бути підтримане, наприклад, через оцінювання різниці часів від мережі, через оцінювання вимірювань OTD, виконаних у мобільному засобі, і повторне встановлення відношення з стільниковим часом КТС, якщо невизначеність відношення стає занадто великою, або оцінюванням допоміжного часу GNSS від мережі. Наприклад, у мережах CDMA, GPS і КТС часи є доступними за замовчування. Якщо мобільний засіб має точне відношення часів, воно може бути використане для поліпшення ефективності стосовно часу першого визначення і чутливості. Поліпшення ефективності може бути досягнуте з відношенням часів з точністю до сотень мкс. Підтримання відношення часів може потребувати вимог допоміжних даних мобільним засобом від мережі зв'язку. Мережа зв'язку може збирати дані щодо місцеположення, відношення часів і вимірювання OTD як дані зворотного зв'язку через мобільні засоби для створення бази даних різниць часів між базовими станціями. Ця база даних може бути використана для надання допоміжних даних з точним часом мобільним засобам для поліпшення чутливості без надання базованій на супутниках 91857 20 системі визначення місцеположення часу як такого. Якщо мобільний засіб не в змозі обчислити місцеположення, вимірювання сигналів супутника у зворотному зв'язку також можуть бути використані для оцінювання положення мобільного засобу у мережі зв'язку. Згідно з третім аспектом винаходу, запропоновано спосіб підтримки базованого на супутниках визначення місцеположення мобільного засобу з використанням допоміжних даних, згідно з яким цей мобільний засіб пристосовують мати зв'язок з мережею зв'язку і отримувати сигнали, передані супутниками щонайменше однієї базованої на супутниках системи визначення місцеположення, причому мережу зв'язку пристосовують підтримувати щонайменше два різні режими визначення місцеположення. Цей спосіб включає передачу щонайменше одного набору даних, незалежних від використаного режиму визначення місцеположення, у щонайменше одному напрямку між мобільним засобом і мережею зв'язку у процесі визначення місцеположення цього мобільного засобу. Згідно з третім аспектом винаходу, запропоновано також мережевий елемент для мережі зв'язку, що підтримує базоване на супутниках визначення місцеположення мобільного засобу з використанням допоміжних даних, причому цей мобільний засіб пристосовують мати зв'язок з мережею зв'язку і отримувати сигнали, передані супутниками щонайменше однієї базованої на супутниках системи визначення місцеположення. Цей мережевий елемент включає засоби обробки, пристосовані передавати щонайменше один набір даних, незалежних від використаного режиму визначення місцеположення, до мобільного засобу і/або приймати щонайменше один набір даних, незалежних від використаного режиму визначення місцеположення, від мобільного засобу у процесі визначення місцеположення цього мобільного засобу. Крім того, згідно з третім аспектом винаходу, запропоновано мобільний засіб, який використовує допоміжні дані для підтримки базованого на супутниках визначення місцеположення цього мобільного засобу і має у складі приймач сигналу супутника, пристосований отримувати сигнали, передані супутниками щонайменше однієї базованої на супутниках системи визначення місцеположення. Цей мобільний засіб також включає компонент зв'язку, пристосований передавати щонайменше один набір даних, незалежних від використаного режиму визначення місцеположення, до мобільного засобу і/або приймати щонайменше один набір даних, незалежних від використаного режиму визначення місцеположення, від мобільного засобу у процесі визначення місцеположення цього мобільного засобу. Згідно з третім аспектом винаходу, крім того, запропоновано систему, яка включає запропонований мережевий елемент третього аспекту винаходу і запропонований мобільний засіб третього аспекту винаходу. Згідно з третім аспектом винаходу, крім того, запропоновано перший код програмного забезпечення для підтримки базованого на супутниках 21 визначення місцеположення мобільного засобу з використанням допоміжних даних, причому цей мобільний засіб адаптують мати зв'язок з мережею зв'язку і отримувати сигнали, передані супутниками щонайменше однієї базованої на супутниках системи визначення місцеположення. При виконанні обробляючим вузлом мережевого елемента мережі зв'язку цей код програмного забезпечення передає щонайменше один набір даних, незалежних від використаного режиму визначення місцеположення, до мобільного засобу і/або приймає щонайменше один набір даних, незалежних від використаного режиму визначення місцеположення, від мобільного засобу у процесі визначення місцеположення цього мобільного засобу. Крім того, згідно з третім аспектом винаходу, запропоновано програмний продукт першого коду програмного забезпечення, в якому зберігається перший код програмного забезпечення, запропонований для третього аспекту винаходу. Згідно з третім аспектом винаходу, запропоновано також другий код програмного забезпечення для підтримки базованого на супутниках визначення місцеположення мобільного засобу з використанням допоміжних даних, причому цей мобільний засіб адаптують мати зв'язок з мережею зв'язку і отримувати сигнали, передані супутниками щонайменше однієї базованої на супутниках системи визначення місцеположення. При виконанні обробляючим вузлом мережевого елемента мережі зв'язку цей код програмного забезпечення передає щонайменше один набір даних, незалежних від використаного режиму визначення місцеположення, до мобільного засобу і/або приймає щонайменше один набір даних, незалежних від використаного режиму визначення місцеположення, від мобільного засобу у процесі визначення місцеположення цього мобільного засобу. Згідно з третім аспектом винаходу, запропоновано програмний продукт другого коду програмного забезпечення, в якому зберігається другий код програмного забезпечення, запропонований для третього аспекту винаходу. Третій аспект винаходу базується на тому, що різні поточні допоміжні стандарти надають різні специфікації для різних режимів визначення місцеположення. Для уніфікації і спрощення специфікацій і режимів обробки запропоновано, щоб щонайменше один набір даних, якими обмінюються мобільний засіб і мережа зв'язку у процесі визначення місцеположення, був одним і тим же незалежно від використаного режиму визначення місцеположення. Щонайменше один набір даних може належати, наприклад, допоміжним даним, переданим від мережі зв'язку до мобільного засобу. Це дозволяє забезпечити, щоб операції, що виконуються у мобільному засобі для базованого на супутниках визначення місцеположення також були однаковими незалежно від використаного режиму визначення місцеположення. Крім того, щонайменше один набір даних може бути частиною інформації зворотного зв'язку, переданої від мобільного засобу до мережі зв'язку. У цьому випадку щонайменше один набір даних 91857 22 може включати, наприклад, інформацію про вимірювання сигналів супутників, отриманих мобільним засобом. Якщо мобільний засіб визначає власне місцеположення, базуючись на отриманих сигналах супутників, це місцеположення може бути додане до загального набору даних. Слід відзначити, що місцеположення мобільного засобу може бути обчислене як у цьому мобільному засобі, так і у мережі зв'язку. Ще один аспект винаходу базується на тому, що замість обчислення будь-яких корекційних даних, базованих на нормальних параметрах ефемериди, ці корекційні дані можна обчислити з параметрів довготермінової моделі орбіти, дійсної протягом щонайменше одного дня. Тому корекційні дані можуть бути використані з довготерміновими орбітальними параметрами, а не лише з короткотерміновими параметрами ефемерид. Параметри можуть бути надані раніше, ніж корекційні дані або одночасно з ними. Корекційними даними можуть бути, наприклад, корекційні дані WAAS, EGNOS або DGPS або інші, або нові типи корекційних даних. Точні параметри довготермінової моделі орбіти деградують з часом, але запропоновані корекційні дані дозволяють продовжити довговічність цих довготермінових орбітальних параметрів. Отже, запропоновані корекційні дані дозволяють підвищити точність і цілісність довготермінових моделей орбіти. Оскільки точні корекційні дані дозволяють оновлювати модель орбіти менш часто, кількість даних, що мають передаватись між мережею зв'язку і мобільним засобом, зменшується і навантаження на смугу частот знижується. Крім того, корекційні моделі можуть бути більш точними і довготерміновими, ніж існуючі моделі. Внаслідок природи селективної доступності корекції DGPS, наприклад, були спочатку дуже короткотерміновими і не дуже точними. Оскільки зараз селективна доступність не використовується, корекції DGP-S нового типу можуть бути отримані дуже точними. Крім того, єдиний формат корекційних даних може бути використаний для всіх сузір'їв супутників, наприклад, GPS, Galileo, Glonass тощо. У мережі сервер може обчислювати корекційні дані для довготермінових моделей орбіти згідно з третім аспектом винаходу. Параметри довготермінової моделі орбіти можуть бути дійсними протягом декількох днів і потребувати деякої смуги частот мережі, якщо їх передавати як частину допоміжних даних до мобільного засобу. Корекційні дані можуть бути дійсними протягом декількох годин, але вони потребують меншої смуги частот, ніж передачі параметрів довготермінової моделі орбіти. Відповідний набір корекційних даних може бути обчислений різними способами. Фактично корекційні дані можуть бути обчислені, наприклад, на основі реальних вимірювань, отриманих від базових станцій, або базуючись на існуючій моделі EGNOS/WAAS. Форма фактичних корекційних даних не залежить від способу обчислення корекцій. У мобільному засобі корекційні дані приймаються і використовуються для корекції параметрів довготермінової моделі орбіти перед виконанням 23 відповідного оцінювання положення супутника. Реалізація у мобільному засобі може передбачати використання корекційних даних подібно до звичайних корекцій DGPS. Однак, кількість обчислень корекцій псевдодально-сті для одного супутника залежить від корекційної моделі. Модель для обчислення корекційних даних може бути, наприклад, поліноміальною моделлю високого порядку, наприклад, 2-гоабо 3-го порядку, лінійно-ламаною безперервною поліноміальною моделлю або навіть більш складною моделлю. Зрозуміло, що запропоноване обчислення корекційних даних може бути використане з першим, другим і третім аспектами винаходу. Мережевим елементом першого, другого і третього аспектів винаходу може бути, наприклад, сервер мережі або базова станція мережі зв'язку згідно з першим, другим і третім аспектами винаходу; придатною є, наприклад, стільникова мережа зв'язку, зокрема мережа GSM, мережа WCDMA або мережа CDMA тощо, а також нестільникова мережа, наприклад, мережі WLAN, Bluetooth™ або мережа WiMax тощо. Мобільні засоби у першому, другому і третьому аспектах винаходу можуть включати мобільний пристрій зв'язку, наприклад, мобільний телефон, в який вбудовано приймач сигналу супутника. В іншому варіанті приймач сигналу супутника може бути допоміжним пристроєм для мобільного пристрою зв'язку. Зрозуміло, що всі елементи, описані для першого аспекту винаходу можуть бути комбіновані з втіленнями другого аспекту винаходу і навпаки. Інші об'єкти і ознаки винаходу розглядаються у подальшому детальному описі з посиланнями на креслення, в яких: Фіг.1 - блок-схема системи підтримки A-GNSS; Фіг.2 - блок-схема операцій у системі Фіг.1. Фіг.1 містить блок-схему системи підтримки AGNSS згідно з одним з втілень винаходу. У цій системі уникнуто необхідності надавати час GNSS час як допоміжні дані і використано допоміжні дані. Система включає базову станцію 10 і сервер 20 мережі GSM або будь-якої іншої стільникової мережі зв'язку. Система також включає першу мобільну станцію (MS1) 30, другу мобільну станцію (MS2) 40, супутники GPS (GPS SV) 50 і супутники Galileo (GPS SV) 60. Базова станція 10 забезпечує радіоінтерфейс для мобільних станцій 20, 30, розташованих у її зоні. Вона має обробляючий вузол 11, здатний виконувати різні компоненти коду прикладного програмного забезпечення, включаючи компонент 12 отримання параметру, компонент 13 заміни еталонного часу, компонент 14 компонування повідомлення і компонент 15 пересилання зворотного зв'язку. До сервера 20 мережі можуть мати доступ різні базові станції 10 цієї стільникової мережі зв'язку. Крім того, є приєднаний до GPS і до Galileo сервер контролю (не показаний). Він має пам'ять 21 для збереження бази даних і обробляючий вузол 22, здатний виконувати різні компоненти коду прикладного програмного забезпечення, включаючи компонент 23 обчислення параметру, компо 91857 24 нент 24 оновлення бази даних і компонент 25 оцінки місцеположення. Перша мобільна станція 30 є мобільним засобом який включає приймач 31 GPS. Приймач 31 GPS має компонент 32 захоплення і стеження, який може бути реалізований схемно і/або програмно. Наприклад, захоплення і стеження за сигналами, прийнятими від супутників 50 GPS, вимірювання сигналів, задачі кореляції можуть виконуватись схемою під керуванням коду програмного забезпечення, який виконується обробляючим вузлом приймача 31 GPS. Мобільна станція 30, крім того, має стільниковий виконавчий вузол 35 як стільниковий компонент зв'язку. Виконавчим вузлом є модуль, що включає всі компоненти, потрібні для звичайного мобільного зв'язку між мобільним телефоном 30 і стільниковою мережею зв'язку, і може поліпшений додатковими функціями. Стільниковий виконавчий вузол 35 має вузол обробки даних, здатний виконувати різні компоненти коду прикладного програмного забезпечення. У цьому втіленні ці компоненти коду програмного забезпечення включають прикладний компонент 36, компонент 37 оцінювання повідомлення і компонент 38 оцінювання місцеположення. Задачі, що виконуються прикладним компонентом 36, можуть бути будь-якими прикладними задачами, які потребують інформації стосовно місцеположення, наприклад, навігаційними задачами або задачами, що забезпечують певне обслуговування, що надається користувачу мобільної станції 30 у певному місцеположенні тощо. В іншому варіанті задачі прикладного компонента 36 і компонента 38 оцінювання місцеположення можуть виконуватись іншим вузлом обробки, наприклад, обробляючим вузлом приймача 31 GPS. Друга мобільна станція 40 є подібною першій мобільній станції 30, але замість приймача GPS вона має приймач Galileo, пристосований приймати і стежити за сигналами від супутників 60 Galileo. В іншому варіанті друга мобільна станція 40 може включати, наприклад, гібридний приймач GPS і Galileo. Далі розглядається інформація, потрібна для визначення місцеположення мобільних станцій 30, 40 у системі Фіг.1 з посиланнями на Фіг.2, яка містить схему операцій однієї з мобільних станцій 30, 40 (ліва частина Фіг.2), базової станції 10 (середня частина) і сервера 20 мережі (права частина). Сервер 20 мережі приймає з регулярним інтервалом параметри ефемериди і альманаху GPS від сервера контролю GPS для всіх наявних супутників 50 GPS і відповідні параметри Galileo від сервера контролю Galileo для всіх наявних супутників 60 Galileo. Параметри GPS узгоджені з GPS ICD і тому належать до моделі орбіти GPS, що відповідає даним ефемериді або альманаху. Параметри Galileo узгоджені з Galileo ICD і тому належать до даній моделі орбіти Galileo. Сервер 20 мережі може також приймати додаткову інформацію від сервера контролю GPS, від сервера контролю Galileo або від іншого джерела, наприклад, від корекцій EGNOS і WAAS які передаються ши 25 рокомовно геостаціонарними супутниками EGNOS і WAAS. Компонент 23 обчислення параметрів конвертує прийняті параметри GPS у параметри загальної моделі орбіти (опер. 201). Далі він конвертує прийняті параметри Galileo у параметри такої ж загальної моделі орбіти. Супутник, якому відповідають ці параметри, може бути ідентифікований, наприклад, через індекси, що містять не лише PRN, але й ідентифікатор сузір'я. Загальна модель орбіти є описом орбітальних параметрів і алгоритмом обчислення інформації про положення супутника, наприклад, положення, швидкості і прискорення для супутників GPS і Galileo, і, можливо, також для супутників будь-якої іншої системи (GNSS, наприклад, GLONASS, EGNOS і/або WAAS). Крім того, загальна модель орбіти дозволяє обчислювати корекції до сигнали супутника, зумовлені дрейфом годинника. Слід відзначити, що будь-які корекційні дані, що включають корекційні дані типу WAAS, EGNOS і/або DGPS, можуть бути обчислені або переобчислені спеціально для даної загальної моделі орбіти. Конверсія параметрів дозволяє використати параметри GNSS, тобто кількість параметрів і довжина слова у них є однаковими для GPS і Galileo тощо. Параметри загальної моделі орбіти можуть бути придатними протягом довшого періоду, ніж параметри ефемерид GPS. Крім того, вони можуть визначати положення супутників більш точно, ніж, наприклад, модель орбіти альманаху GPS. Цього можна досягти, наприклад, використанням більшої кількості параметрів або більшої довжини слів, ніж у параметрах переданих супутниками. Отже, загальна модель орбіти може бути моделлю орбіти лише для GPS. Зрозуміло, що конверсія параметрів включає також їх переобчислення. Отримані параметри загальної моделі орбіти для відповідного супутника включають еталонні значення, які визначають еталонний час для включеної інформації, базованої на системному часі GNSS, до якої належить супутник, наприклад, TOE для даних ефемерид GPS або ТОА для даних альманаху GPS. Наприклад, для супутника GPS еталонний час базується на відліку TOW GPS, наприклад, TOE або ТОА. Прикладний компонент 36 мобільної станції 30, 40 може потребувати деякої інформації стосовно місцеположення. Для отримання цієї інформації він може потребувати допоміжних даних для GPS і/або Galileo від стільникової мережі зв'язку (опер. 301). Вимога допомоги містить визначення типу GNSS, який підтримується мобільною станцією 30, 40. Коли базова станція 10 приймає вимогу допомоги, компонент 12 отримання параметру інструктує сервер 20 мережі надати параметри загальної моделі орбіти для цих супутників 50, 60 для GNSS, які є наразі видимими від базової станції 10 (опер. 101). Інструкція включає ідентифікатор базової станції 10 і ідентифікатори GNSS. Після цього компонент 23 обчислення параметру у сервері 20 мережі визначає супутники 50, 60, видимі від базової станції 10, які належать до зазначених GNSS (опер. 202). Поточні положення 91857 26 супутників можуть бути визначені засобами формування параметрів моделі орбіти. Супутники, видимі від ідентифікованої базової станції 10 можуть бути легко визначені, якщо зв'язок між відповідними ідентифікаторами всіх базових станцій і їх місцеположеннями зафіксований і зберігається у сервері 20 мережі, наприклад, у базі даних у пам'яті 21. Компонент 23 обчислення параметру обирає параметри моделі орбіти для видимих супутників і надає їх базовій станції 10, можливо, разом з додаткової інформацією. Така додаткова інформація може включати, наприклад, корекції DGPS і RTK, корекції EGNOS і/або WAAS, короткотермінові диференційні корекції, короткотермінові попередження стосовно цілісності і вимірювання фази несучої частоти. За спеціальною вимогою мобільної станції 30, 40, переданою базовою станцією 10, у додаткову інформацію можуть бути також включені біти даних, до визначають їх стирання. Компонент 12 отримання параметру у базовій станції 10 приймає надану інформацію і передає її до компоненту 13 заміни еталонного часу. Компонент 13 заміни еталонного часу базової станції 10 замінює базований на GNSS еталонний час моделі орбіти параметрів для кожного видимого супутника 50, 60 еталонним часом стільникової системи (опер. 102). Якщо ця стільникова мережа зв'язку є мережею GSM, еталонний час стільникової системи може включати, наприклад, групу номерів кадрів, часову щілину і номер біту {FN, TS, BN}, які репрезентують базований на GNSS еталонний час. Якщо стільникова мережа зв'язку є мережею WCDM, еталонний час стільникової системи може включати, наприклад, системний номер кадру (SFN), щілину і чіп, які репрезентують базований на GNSS еталонний час. Для здійснення заміни базованого на GNSS еталонного часу еталонним часом стільникової системи, базова станція 10 має мати поточне відношення між часом GNSS і часом стільникової системи зв'язку. Це відношення може бути забезпечене для базової станції 10 декількома шляхами, оскільки вимоги до точності цього відношення є не дуже суворими. Достатньо мати відношення з точністю 10-100мкс або навіть 1мс. Супутник рухається з швидкістю приблизно 3,8км/с, і тому помилка визначення положення супутника, яка відповідає 1мс, становитиме щонайбільше 4м, що є припустимим. У першому варіанті LMU пов'язується з базовою станцією 10. У цьому випадку LMU може визначати час GNSS і надавати його до базової станції 10, яка після цього сама визначає відношення. Слід відзначити, що може виявитись досить коштовним надання всім базовим станціям мережі власний LMU. У другому варіанті стільникова мереж зв'язку має лише один LMU і різниці часів для всіх базових станцій 10 виміряються стільниковою мережею зв'язку у місці, де знаходиться цей LMU. Наприклад, одна базова станція у мережі може бути обладнана LMU для отримання відношення між часом GNSS і часом стільникової системи зв'язку. Часові різниці між обладнаною LMU базовою ста 27 нцією і всіма іншими базовими станціями 10 у мереж виміряються для створення відношення часу GNSS і часу систем зв'язку для будь-якої базової станції 10 у стільниковій мережі зв'язку. Часові різниці можуть бути виміряні, наприклад, збиранням і оцінюванням вимірювань OTD, наданих за замовчування мобільними станціями 30, 40 стільниковій мережі зв'язку. У третьому варіанті є лише один LMU у стільниковій мережі зв'язку, і часові різниці виміряються з використанням матричних методів. У цьому випадку мобільні станції 30, 40 забезпечують обладнанням для виміряння часових різниць, базуючись на вимірюваннях OTD. Кембриджська Система визначення місцеположень (CPS), наприклад, пропонує визначати місцеположення і підтримувати час саме у такий спосіб. Цей спосіб включає більш спеціалізовані вимірювання часових різниць для базової станції у мобільній станції, підтримання відповідної бази даних у мобільній станції і використання цієї бази даних для визначення місцеположення і часу GPS. Цей спосіб називають поліпшеним GPS (E-GPS). Використання способу E-GPS дозволяє стільниковій мережі зв'язку отримувати також у стільниковій системі часові різниці між LMU базової станції і іншими базовими станціями 10, якщо ці часові різниці визначено у мобільній станції 30, 40 і передано до стільникової мережі зв'язку. У четвертому варіанті LMU не є потрібним у стільниковій мережі зв'язку. Замість цього мобільна станція 30, 40 забезпечує отримання відношення між часом GNSS і часом стільникової системи зв'язку. Якщо мобільна станція 30, 40 вже має придатне відношення від попереднього сеансу визначення місцеположення або від рішень EGPS, ця інформація може бути надіслана до стільникової мережі зв'язку разом з вимогою допоміжних даних. Далі будуть розглянуті деякі варіанти отримання і підтримання придатного відношення часів у мобільній станції 30, 40 (опер. 306). Базова станція 10 після цього може використовувати відношення часів, надане мобільною станцією 30, 40, для обчислення базованого на стільниковій системі еталонного часу для параметрів моделі орбіти. Зв'язок часу GNSS з часом стільникової системи зв'язку був також описаний у патентах США 6 678.510 В2 І 6 748 202 В2. Після заміни базованого на GNSS еталонного часу у параметрах моделі орбіти для кожного видимого супутника 50, 60 GNSS відповідним базованим на стільниковій системі еталонним часом повідомлення компонент 14 компонування компонує повідомлення для кожного з цих супутників 50, 60 (опер. 103). Повідомлення є однаковим для будь-якого типу режиму визначення місцеположення. Це повідомлення з параметрами моделі орбіти включає інформаційні елементи (IE), які містять замінений еталонний час. Крім того, воно може включати еталонні місцеположення, а саме, відоме місцеположення базової станції 10. Воно може включати також будь-яку інформацію, надану сервером 20 мережі або будь-яким іншим джерелом, або інформацію, генеровану у самій базовій станції 10. 91857 28 Після цього повідомлення передаються до мобільної станції 30, 40, яка вимагала його. Слід відзначити, що в іншому варіанті базова станція 10 може формувати такі повідомлення з регулярними інтервалами для всіх видимих супутників 50, 60 і широкомовно передавати ці повідомлення до всіх мобільних станцій 30, 40 комірки, що обслуговується базовою станцією 10. Компонент 37 оцінювання повідомлень мобільної станції 30, 40 приймає повідомлення і декодує номер кадру, часову щілину і номер біту для визначення часу стільникової системи зв'язку. Крім того, від відділяє інформацію, включену у прийняті повідомлення (опер. 302). Показник часу стільникової системи зв'язку, можливо, у відношенні до локального часу і ця відділена інформація, що включає параметри моделі орбіти надсилаються до компонента 38 оцінювання місцеположення. Компонент 38 використовує алгоритми загальної моделі орбіти. Базуючись на цих алгоритмах, компонент 38 оцінювання місцеположення екстраполює траєкторію відповідного супутника як функцію поточного часу стільникової системи зв'язку, використовуючи надані параметри моделі орбіти і, можливо, ураховуючи короткотермінові диференційні корекції тощо (опер 303). Базуючись на отриманій траєкторії супутника, компонент 38 оцінювання місцеположення може у звичайний спосіб визначити межі часу проходження сигналу супутника і доплерівської частоти Знання меж часу проходження і доплерівської частоти, дозволяє обмежити можливі фази коду, що підлягають перевірці. Такі межі фази коду визначаються для всіх супутників, для яких були надані параметри моделі орбіти, за винятком тих, для яких крім того було надіслане попередження про короткотермінову цілісність. Це попередження може надаватись сервером 20 мережі через базову станцію 10 в усіх випадках раптового виходу супутника з ладу. Компонент 38 оцінювання місцеположення пересилає визначені межі фази коду і, можливо, додаткову інформацію, включену у прийняті повідомлення до компонента 32 захоплення і стеження. Компонент 32 захоплює видимі супутники (опер 304). Надіслана інформація використовується для прискорення пошуку сигналів супутників обмеженням варіантів цього пошуку. Компонент 32 захоплення і стеження може також декодувати навігаційні дані в отриманих сигналах супутників. Компонент 32 надсилає результати вимірювань, що включають будь-які декодовані навігаційні дані до компонента 38 оцінювання місцеположення. Компонент 38 може тепер визначити місцеположення мобільної станції 30, 40 у звичайний спосіб (опер 305), тобто визначити псевдовідстані до тих супутників 50, 60, від яких були прийняті сигнали. Крім того, він визначає точні положення супутників, базуючись на декодованих навігаційних даних на час передачі сигналів, вказаний у декодованих навігаційних даних і уточнених результатами вимірювань. Компонент 38 оцінювання місцеположення після цього використовує псевдовідстані разом з визначеними положеннями супутників для оцінювання місцеположення мобільної станції. Компонент 38 може також визначати 29 у звичайний спосіб будь-яке іншу бажану інформацію, пов'язану з місцеположенням, наприклад, швидкість, час GNSS неточності вимірювань і визначення місцеположення тощо. Ця інформація може після цього бути надіслана до компонента 36 прикладних задач для відповідного використання. Компонент 38 оцінювання місцеположення мобільної станції 10 за замовчування налає визначену додаткову інформацію, прийняті результати вимірювань і відношення між часом стільникової системи зв'язку і часом GNSS як дані зворотного зв'язку до стільникової мережі зв'язку. Дані зворотного зв'язку завжди є однаковими незалежно від використаного режиму визначення місцеположення, за винятком того, що місцеположення мобільної станції 10 може бути отримане лише тоді, коли воно було визначене мобільною станцією 10. Дані зворотного зв'язку пересилаються компонентом 15 пересилання зворотного зв'язку базової станції 10 до сервера 20 мережі (опер 104). Компонент 24 оновлення бази даних сервера 20 мережі може збирати інформацію про місцеположення, відношення між часом стільникової системи зв'язку і часом GNSS і, крім того, вимірювання OTD, для створення і оновлення бази даних 21 часових різниць між різними базовими станціями (опер. 203). База даних 21 може використовуватись для надання точних за часом допоміжних даних до мобільних станцій 30, 40 для поліпшення чутливості без надання часу GNSS як такого. Компонент 25 обчислення місцеположення сервера 20 мережі може використовувати результати вимірювань з даних зворотного зв'язку (якщо вони є) для оцінювання місцеположення мобільної станції 30, 40, якщо мобільні станції 30, 40 не можуть самі обчислити їх місцеположення (опер. 204). Мобільна станція 30, 40 може також підтримувати відношення між часом стільникової системи зв'язку і часом GNSS за замовчування (опер. 306). Це може бути здійснене, якщо мобільна станція 30, 40 отримала належне місцеположення від GNSS і здатна пов'язати поточний час стільникової системи зв'язку, наприклад, у вигляді кадрів, субкадрів, щілини, біту і чіпу, з часом GNSS, або прийняла початкове відношення як допоміжні дані. У цьому випадку мобільна станція 30, 40 може реконструювати або отримати час GNSS у будь-який момент, просто оцінюючи час, що пройшов після останнього отримання місцеположення від GNSS з використанням часу стільникової системи зв'язку, і вважаючи, що мобільна станція 30, 40 не перейшла з однієї комірки в іншу. Якщо мобільна станція 30,.40 переходить з однієї комірки до іншої, відно 91857 30 шення між часом GNSS і часом стільникової системи зв'язку має бути встановлений наново, базуючись на новому отримання місцеположення від GNSS. В іншому варіанті існуюче відношення може бути оновлене на основі часової різниці між базовою станцією, що обслуговувала попередню комірку, і базовою станцією, що обслуговує поточну комірку. Часова різниця може бути отримана з допоміжних даних мережі OTD за припущення наявності бази даних часових різниць. Часова різниця може бути також отримана з вимірювань OTD, виконаних самим терміналом або з різниці часу проходження і/або часу проходження у прямому і зворотному напрямках у попередній і поточній комірках. В іншому варіанті відношення часів може підтримуватись, наприклад, даними часу GPS від стільникової мережі зв'язку. У мережах CDMA, наприклад, час GPS є доступним за замовчування. Якщо мобільна станція 30, 40 має дійсне відношення часів GNSS і стільникової системи зв'язку, це відношення може бути використане для поліпшення ефективності, тобто часу до першого отримання місцеположення і чутливості. Відношення часів GNSS і стільникової системи зв'язку має точність до сотень мкс, що є достатнім для такого поліпшення ефективності. Мобільна станція 30, 40 може повертати виконані вимірювання OTD до стільникової мережі зв'язку з кожною вимогою допоміжних даних (опер. 301). Вона може повертати вимірювання OTD, наприклад, у сек., зокрема, мкс або не, замість кадрових або субкадрових різниць, щоб зробити цю інформацію незалежною від часу стільникової системи зв'язку. Слід відзначити, що описані втілення складають частину можливих втілень винаходу. Наприклад, замість GPS і/або Galileo можуть бути підтримані інші або додаткові GNSS. Як уже відзначалось, замість мережі GSM може бути використана будь-яка стільникова мережа зв'язку іншого типу. Крім того, деякі операції можуть бути розподілені між різними елементами. Наприклад, заміна еталонного часу може виконуватись централізовано на всіх базових станціях або у сервері мережі. Інформація, що надається, також може варіюватись. Замість нової моделі орбіти для супутників GPS і супутників інших GNSS можуть бути використані відомі ефемериди GPS і/або альманах моделі орбіти GPS. Можуть бути використані також одна або більше моделей орбіти, стандартизованих для інших GNSS. Крім того, заміна еталонного часу є не потрібною, якщо час GNSS є легко доступним для мобільних станцій тощо. 31 Комп’ютерна верстка Т. Чепелева 91857 Підписне 32 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSupport of determination of location based on satellites
Автори англійськоюSiuriarinne Yari, Valio Harry, Alanen Kimmo, Kiappi Yani, Galivaara Ismo
Назва патенту російськоюПоддержка определения местоположения, базирующегося на спутниках
Автори російськоюСюрьяринне Яри, Валио Гарри, Аланен Киммо, Кяппи Яни, Галиваара Исмо
МПК / Мітки
МПК: G01S 1/00
Мітки: базованого, супутниках, підтримка, визначення, місцеположення
Код посилання
<a href="https://ua.patents.su/16-91857-pidtrimka-viznachennya-miscepolozhennya-bazovanogo-na-suputnikakh.html" target="_blank" rel="follow" title="База патентів України">Підтримка визначення місцеположення, базованого на супутниках</a>
Спосіб визначення орієнтації і місцеположення транспортного засобу
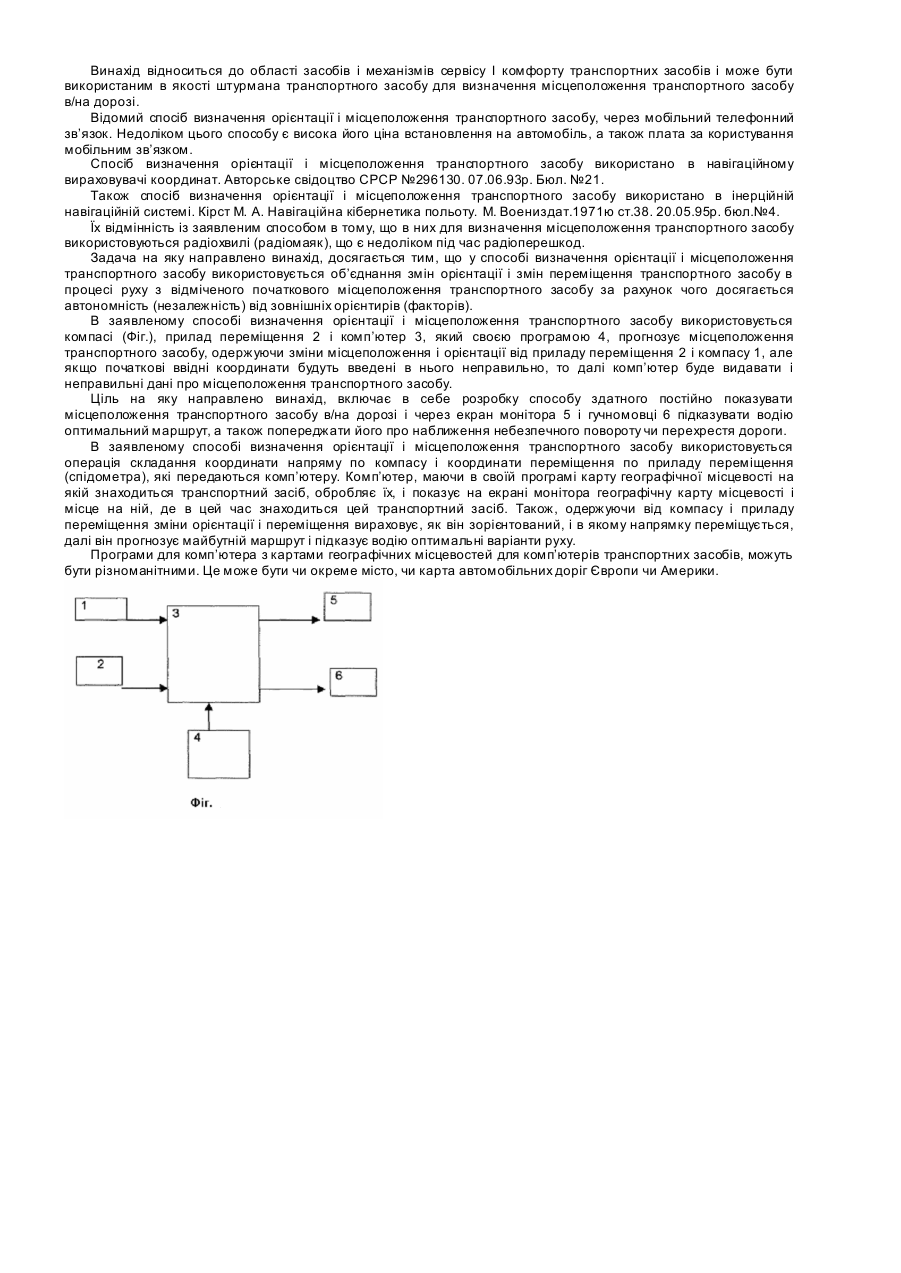
Номер патенту: 64162
Опубліковано: 16.02.2004
Автор: Гайдук Павло Миколайович
МПК: G01C 21/00, G01C 23/00
Мітки: спосіб, орієнтації, транспортного, місцеположення, засобу, визначення
Формула / Реферат:
Спосіб визначення орієнтації і місцеположення транспортного засобу, що полягає в визначенні місцеположення транспортного засобу на географічній карті, який відрізняється тим, що відмічають початкове місцеположення транспортного засобу на географічній карті, введеній у комп’ютер, та визначають його орієнтацію відносно сторін світу, а в процесі руху транспортного засобу зміни його місцеположення і орієнтації передають в комп’ютер, і одержують...
Спосіб визначення місцеположення літального апарата
Номер патенту: 49076
Опубліковано: 12.04.2010
Автори: Герасименко Володимир Вікторович, Слєпов Лев Іванович, Блаженний Валерій Іванович, Щипанський Павло Володимирович
МПК: G01S 5/10
Мітки: літального, визначення, спосіб, апарата, місцеположення
Формула / Реферат:
Спосіб визначення місцеположення літального апарата, при якому визначають місцеположення літального апарата за допомогою використання оглядового радіолокатора, який відрізняється тим, що додатково отримують інформацію про координати місцеположення літального апарата за допомогою двох і більше оглядових радіолокаторів та оцінюють за допомогою формули,і...
Спосіб визначення місцеположення свищів у виробах
Номер патенту: 27486
Опубліковано: 12.11.2007
Автори: Пономаренко Олександр Васильович, Бабак Віталій Павлович, Філоненко Сергій Федорович
МПК: G01N 29/00, F17D 5/02, G01M 3/00, G01N 29/14
Мітки: свищів, виробах, місцеположення, спосіб, визначення
Формула / Реферат:
Спосіб визначення місцеположення свищів у виробах, що включає встановлення на об'єкті контролю двох датчиків, реєстрацію сигналів акустичної емісії з одночасним вимірюванням їх характеристик, за якими визначають місцеположення свищів, який відрізняється тим, що як вищезгадані характеристики використовують положення в часі енергетичного центра ваги пікового сигналу у взаємній кореляційній функції, за яким визначають місцеположення свища у...
Спосіб однозначного визначення місцеположення об’єкта на площині
Номер патенту: 45179
Опубліковано: 26.10.2009
Автори: Шинкарук Олег Миколайович, Солонніков Владислав Григорович, Сівак Вадим Анатолійович, Лисий Микола Іванович
МПК: G08B 13/00, G01S 5/00
Мітки: визначення, спосіб, площині, місцеположення, об'єкта, однозначного
Формула / Реферат:
Спосіб однозначного визначення місцеположення об'єкта на площині, який базується на визначенні пеленга об'єкта тріадою ненаправлених пасивних датчиків, який відрізняється тим, що шукане однозначне місцеположення об'єкта, у вигляді лінійних координат, визначають як точку перетину двох гіпербол і пеленга, які є лініями положення об'єкта.
Спосіб визначення місцеположення термінала (варіанти) та система зв’язку для здійснення способу
Номер патенту: 81240
Опубліковано: 25.12.2007
Автори: Гулкконен Тоні, Бак Юга, Мугонен Янне
МПК: H04Q 7/38
Мітки: зв'язку, система, варіанти, місцеположення, термінала, здійснення, спосіб, визначення, способу
Формула / Реферат:
1. Спосіб визначення місцеположення термінала, який діє в системі зв'язку, що має щонайменше дві мережі з перекривними ділянками покриття, і кожна з мереж підтримує щонайменше один спосіб визначення місцеположення термінала, а термінал знаходиться у зв'язку з першою з мереж,спосіб включає:оцінювання того, яка з мереж є прийнятною для здійснення більш точного визначення місцеположення термінала; іякщо це перша з мереж, то...
Попередній патент: Суспензія для виготовлення гіпсових виробів, гіпсовий обшивальний лист та спосіб його виготовлення
Наступний патент: Спосіб одержання корозійностійкої мідної фольги для друкованих плат
Випадковий патент: Спосіб одержання гідразин гідрату