Процес для передвіщення відповіді датчика параметра


Формула / Реферат
1. Процес для передвіщення відповіді датчика параметра, що включає визначення першої похідної і другої похідної вимірюваного параметра, який відрізняється тим, що визначають постійні часу ланок датчика параметра (D0), при цьому заздалегідь формують перший коректуючий ланцюг (D00), що складається принаймні з двох ланок, визначають вихідні сигнали кожної ланки ланцюга, потім вводять структуру повторення (for) і визначають час від початку обчислення (Si), потім формують другий коректуючий ланцюг (D0K), що складається принаймні з двох ланок, визначають вихідні сигнали кожної ланки ланцюга, після чого формують третій коректуючий ланцюг (Р), що складається з однієї ланки, визначають першу похідну (DM) вихідного сигналу третього коректуючого ланцюга (Р) і обчислюють постійний час ланки (Т) датчика параметра (D0), після цього записують обчислений час (Т) і присвоюють його першому часу (Td1), який вводиться в першу ланку другого коректуючого ланцюга (D0K), потім визначають наступний параметр часу (Т) і присвоюють його другому часу (Td2), які потім вводять в другу ланку другого коректуючого ланцюга (D0K), при цьому поточний рівень обчислюваного часу (Т) визначають безперервно, і якщо він менше мінімальної межі зони нечутливості (Tz1) і при цьому похідна (DM) менше нуля, то лічильник ступеня (n) віднімає одиницю, а якщо (Т) більше максимальної межі зони нечутливості (Tz2) і при цьому похідна (DM) більше нуля, то лічильник ступеня (n) підсумовує одиницю, при цьому по поточному часу (Т) обчислюють нові значення часу опиту датчика параметра (Т0) і по його значенню визначають поточну мінімальну межу зони нечутливості (Tz1), коли лічильник ступеня (n) віднімає одиницю і поточну максимальну межу зони нечутливості (Tz2), коли лічильник ступеня (n) підсумовує одиницю, межі точності обчислення (Ch) обчислюваного часу (Т) визначають безперервно за показаннями лічильника ступеня (n), поточні параметри обчислювача записують безперервно, а час припинення циклу вимірювання визначають після запису обчислених часів, при цьому визначають абсолютне значення першої похідної (DB0) від сигналу другого коректуючого ланцюга (D0K), і якщо воно менше величини заданого коефіцієнта (К24), то продовженню циклу (ТІ) присвоюють поточне значення керуючої змінною (і), потім формують еквівалент вихідного сигналу датчика параметра (D0) для перевірки обчислювача постійної часу датчика параметра.
2. Процес за п. 1, який відрізняється тим, що вихідний сигнал першої коректуючої ланки (Р01) першого коректуючого ланцюга (D00) визначають по формулі:
Р01=D0+С01*Кt01,
де: Р01 - вихідний сигнал першої коректуючої ланки;
D0 - вихідний сигнал датчика параметра;
С01 - похідна сигналу датчика параметра;
Кt01 - перший коефіцієнт посилення від першого часу Тd01;
С01=D0-E01;
Е01=Е01+С01;
Е01 - інтеграл від похідної С01;
Кt01=Тk01*((Td01/Т0)-К3+К4*(Т0/Td01));
Tk01 - коефіцієнт захисту;
Td01 - перший час, першої коректуючої ланки;
Т0 - час опиту датчика параметра;
К3 - коефіцієнт, рівний 0,5;
К4 - коефіцієнт, рівний 0,083333194445.
3. Процес за п. 1, який відрізняється тим, що вихідний сигнал другої коректуючої ланки першого коректуючого ланцюга (D00) визначають по формулі:
D00=Р01+С02*Кt02,
де: D00 - вихідний сигнал першого коректуючого ланцюга, відповідний вихідному сигналу другої коректуючої ланки;
Р01 - вихідний сигнал першої коректуючої ланки;
С02 - похідна сигналу першої коректуючої ланки;
Кt02 - другий коефіцієнт посилення від часу Td02;
С02=Р01-Е02;
Е02=Е02+С02;
Е02 - інтеграл від похідної С02;
Кt02= k02*((Td02/Т0)-К3+К4*(Т0/Td02));
Tk02 - коефіцієнт захисту;
Td02 - другий час, другої коректуючої ланки;
Т0 - час опиту датчика параметра;
К3 - коефіцієнт, рівний 0,5;
К4 - коефіцієнт, рівний 0,083333194445.
4. Процес за п. 1, який відрізняється тим, що час від початку обчислення (Si) до моменту запису (Т) визначають по формулі:
Si=Si+Т0.
5. Процес за п. 1, який відрізняється тим, що вихідний сигнал першої коректуючої ланки (Р1) другого коректуючого ланцюга (D0K) визначають по формулі:
Р1=D0+С1*Kt1,
де: Р1 - вихідний сигнал першої коректуючої ланки;
D0 - вихідний сигнал датчика параметра;
С1 - похідна сигналу датчика параметра;
Kt1 - перший коефіцієнт посилення, від першого часу Td1;
С1=D0-E1;
E1=E1+C1;
E1 - інтеграл від похідної С1;
Kt1=Тk1*((Td1/Т0)-К3+К4*(Т0/Тd1));
Тk1 - коефіцієнт захисту;
Td1 - перший час, першої коректуючої ланки;
Т0 - час опиту датчика параметра;
К3 - коефіцієнт, рівний 0,5;
К4 - коефіцієнт, рівний 0,083333194445.
6. Процес за п. 1, який відрізняється тим, що вихідний сигнал другої коректуючої ланки другого коректуючого ланцюга (D0K) визначають по формулі:
D0K=Р1+С2*Kt2,
де: D0K - вихідний сигнал другого коректуючого ланцюга, відповідний вихідному сигналу другої коректуючої ланки;
Р1 - вихідний сигнал першої коректуючої ланки;
С2 - похідна сигналу першої коректуючої ланки;
Kt2 - другий коефіцієнт посилення, від другого часу Td2;
С2=Р1-Е2;
Е2=Е2+С2;
Е2 - інтеграл від похідної С2;
Kt2=Tk2*((Td2/Т0)-К3+К4*(Т0/Td2));
Tk2 - коефіцієнт захисту;
Td2 - другий час другої коректуючої ланки;
Т0 - час опиту датчика параметра;
К3 - коефіцієнт, рівний 0,5;
К4 - коефіцієнт, рівний 0,083333194445.
7. Процес за п. 1, який відрізняється тим, що вихідний сигнал третього коректуючого ланцюга (Р) визначають по формулі:
Р=D0K+DE0*Q,
де: Р - вихідний сигнал третього коректуючого ланцюга;
D0K - вихідний сигнал другого коректуючого ланцюга;
DE0 - перша похідна від вихідного сигналу другого коректуючого ланцюга D0K;
Q - інтеграл, пропорційний обчислюваному часу Т;
DE0=D0K-F;
F=F+DE0;
F - інтеграл від похідної DE0;
Q=Q+А1*Y*W;
А1 - проміжна змінна, що керує інтегралом;
Y - коефіцієнт, що дозволяє/забороняє обчислювати інтеграл, визначуваний через другу похідну DK від сигналу другого коректуючого ланцюга D0K;
W - коефіцієнт стійкості обчислення інтеграла, кожний такт, що змінюється, з нуля на одиницю і навпаки;
А1=DM*KU*Q2;
DM - перша похідна вихідного сигналу третього коректуючого ланцюга (Р);
KU - коефіцієнт посилення, залежний від рівня вихідного сигналу другого коректуючого ланцюга D0K і сигналу збудження КО датчика параметра.
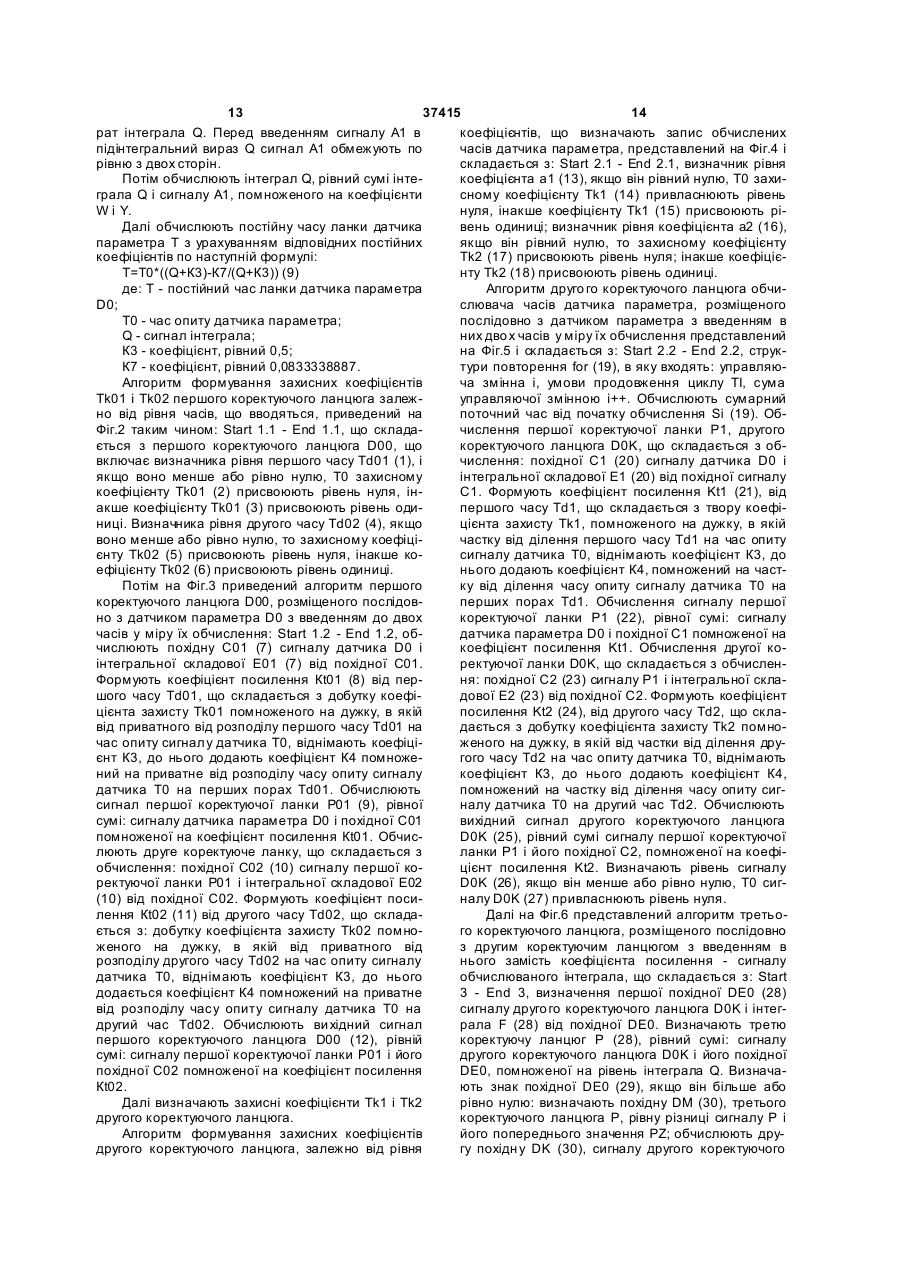
8. Процес за п. 1, який відрізняється тим, що обчислення постійної часу ланки (Т) датчика параметра (D0) визначають залежно від часу опиту датчика параметра (Т0) по наступній формулі:
Т=Т0*((Q+К3)-К7/(Q+К3)),
де: Т - постійна часу ланки датчика параметра D0;
Т0 - час опиту датчика параметра;
Q - інтеграл;
К3 - коефіцієнт, рівний 0,5;
К7 - коефіцієнт, рівний 0,0833338887.
9. Процес за п. 8, який відрізняється тим, що час опиту датчика параметра (Т0) визначають по формулі:
T0=pow(До, n)*К10,
де: Т0 - час опиту датчика параметра;
pow (До, n) - число До в степені n;
К10 - коефіцієнт, рівний 0,000001.
10. Процес за п. 1, який відрізняється тим, що величину мінімальної межі (Tz1) зони нечутливості визначають по формулі:
Tz1=T0*K14,
де: Tz1 - мінімальна межа зони нечутливості;
К14 - коефіцієнт, рівний 250.
11. Процес за п. 1, який відрізняється тим, що величину максимальної межі (Tz2) зони нечутливості визначають по формулі:
Tz2=T0*K16,
де: Tz2 - максимальна межа зони нечутливості;
К16 - коефіцієнт, рівний 750.
12. Процес за п. 1, який відрізняється тим, що величину першого вихідного сигналу (D1) еквівалента датчика параметра (D0) визначають по формулі:
D1=D1+(K0-D1)/t1,
де: D1 - перший вихідний сигнал еквівалента датчика параметра (D0) (вихідний сигнал першої аперіодичної ланки (АПЛ);
К0 - сигнал збудження датчика параметра;
t1 - час першої аперіодичної ланки (АПЛ) від першого часу, що задається (Т1);
t1=(Т1/Т0)+К3+К4*(Т0/Т1);
Т1 - перший час, що задається, першої ланки;
Т0 - час опиту датчика параметра;
К3 - коефіцієнт, рівний 0,5;
К4 - коефіцієнт, рівний 0,083333194445.
13. Процес за п. 1, який відрізняється тим, що величину другого вихідного сигналу (D2) еквівалента датчика параметра (D0) визначають по формулі:
D2=D2+(D1-D2)/12,
де: D2 - другий вихідний сигнал еквівалента датчика параметра (D0) (вихідний сигнал другої аперіодичної ланки);
D1 - вихідний сигнал першої аперіодичної ланки;
t2 - час другої аперіодичної ланки (АПЛ) від другого часу, що задається (Т2);
t2=(Т2/Т0)+К3+К4*(Т0/Т2);
Т2 - другий час, що задається, другої ланки;
Т0 - час опиту датчика параметра;
К3 - коефіцієнт, рівний 0,5;
К4 - коефіцієнт, рівний 0,083333194445.
14. Процес за п. 1, який відрізняється тим, що перевірку обчислювача проводять по вихідному сигналу еквівалента датчика параметра (D0):
D0=D1*d1+D2*d2,
де: D1 - вихідний сигнал першої аперіодичної ланки;
d1 - коефіцієнт вибору, якщо він рівний одиниці, Т0 коефіцієнт вибору d2, рівний нулю і навпаки;
D2 - вихідний сигнал другої аперіодичної ланки;
d2 - коефіцієнт вибору.
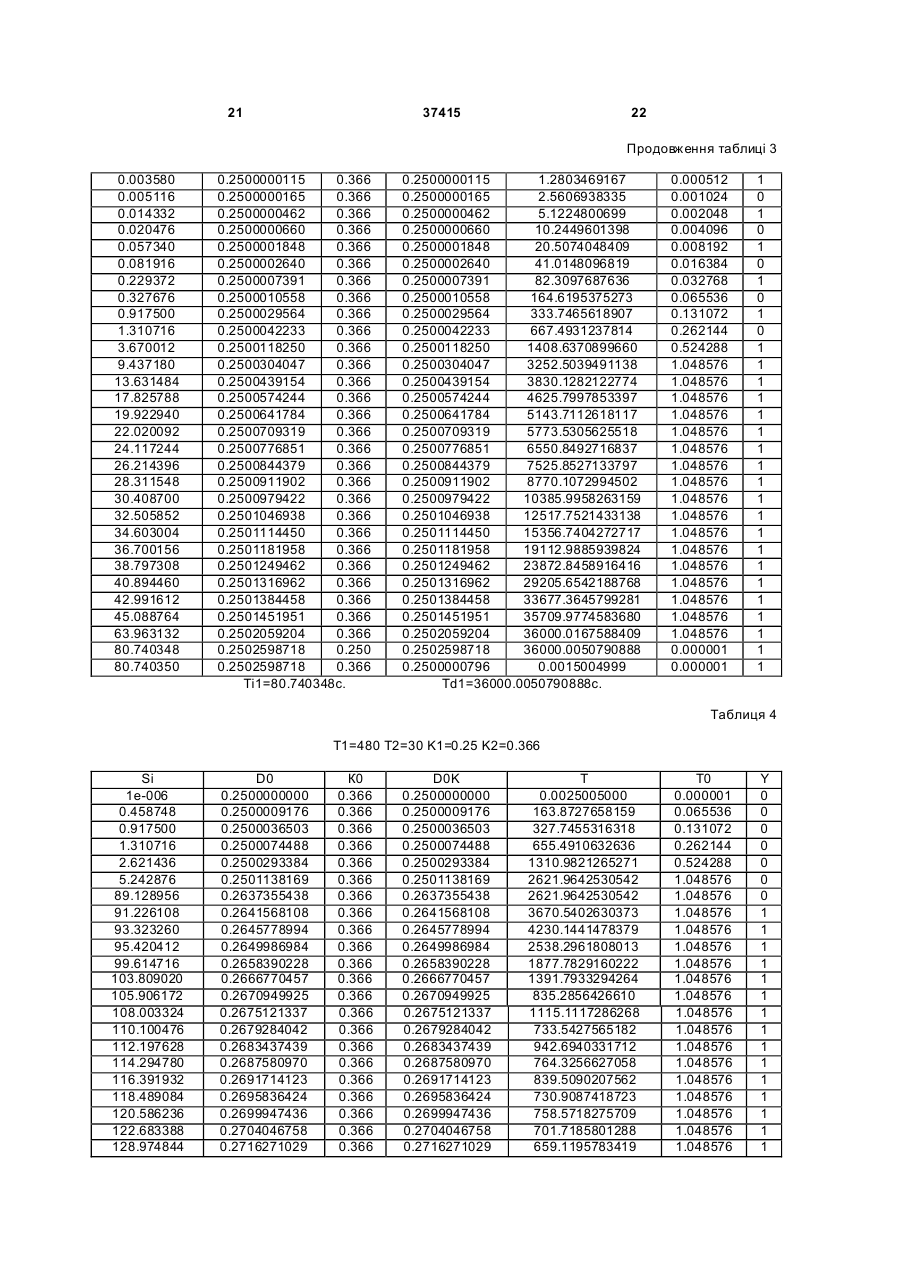
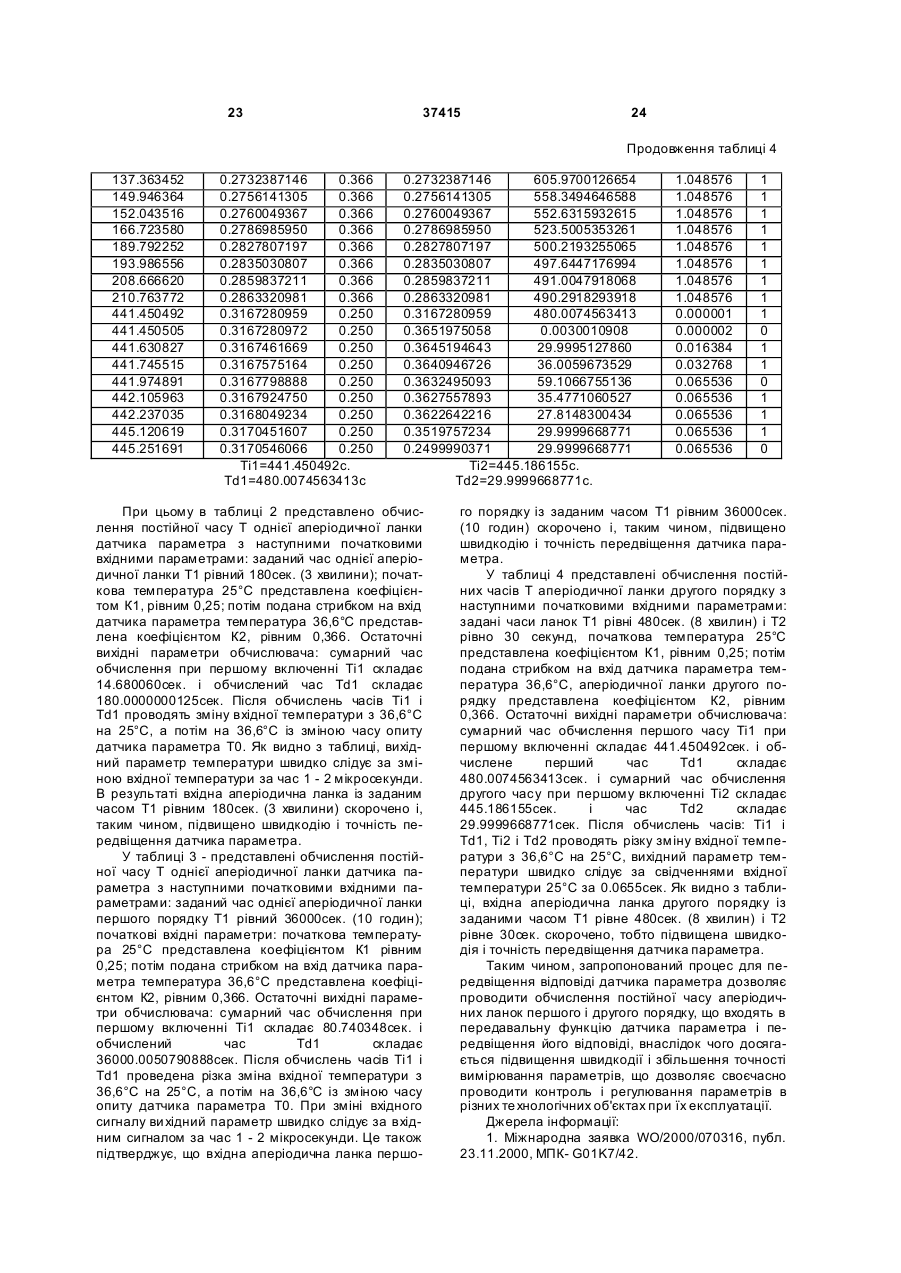
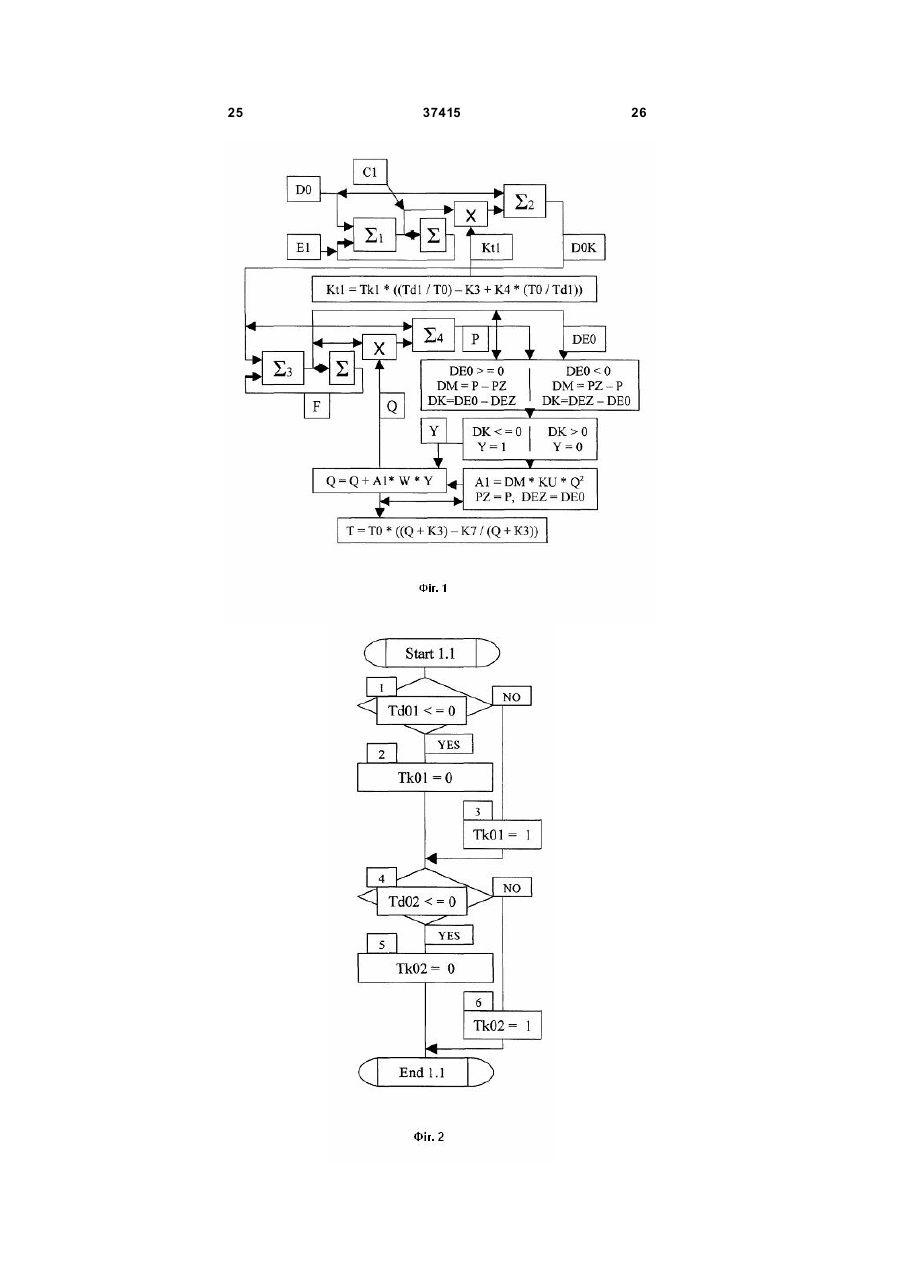
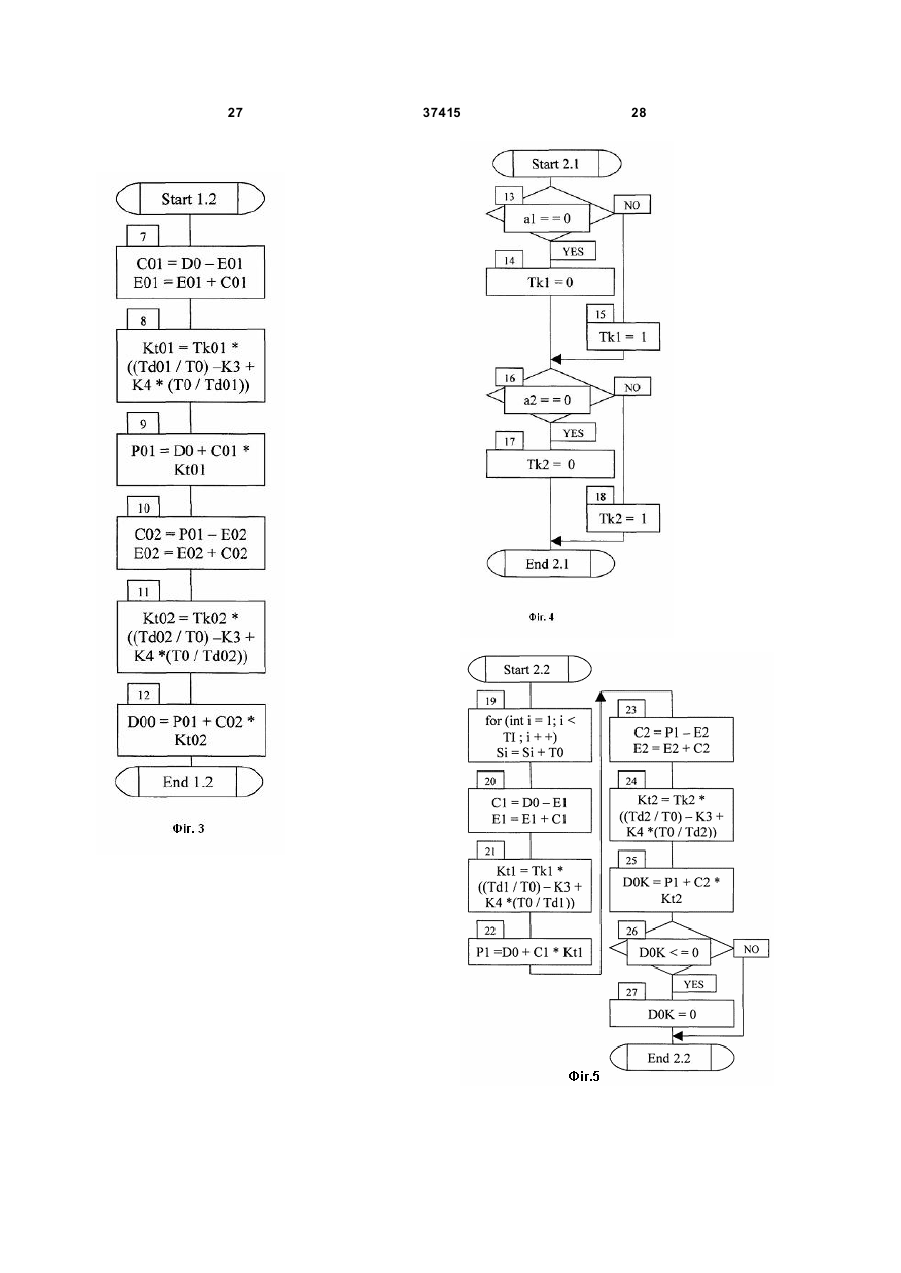
Текст
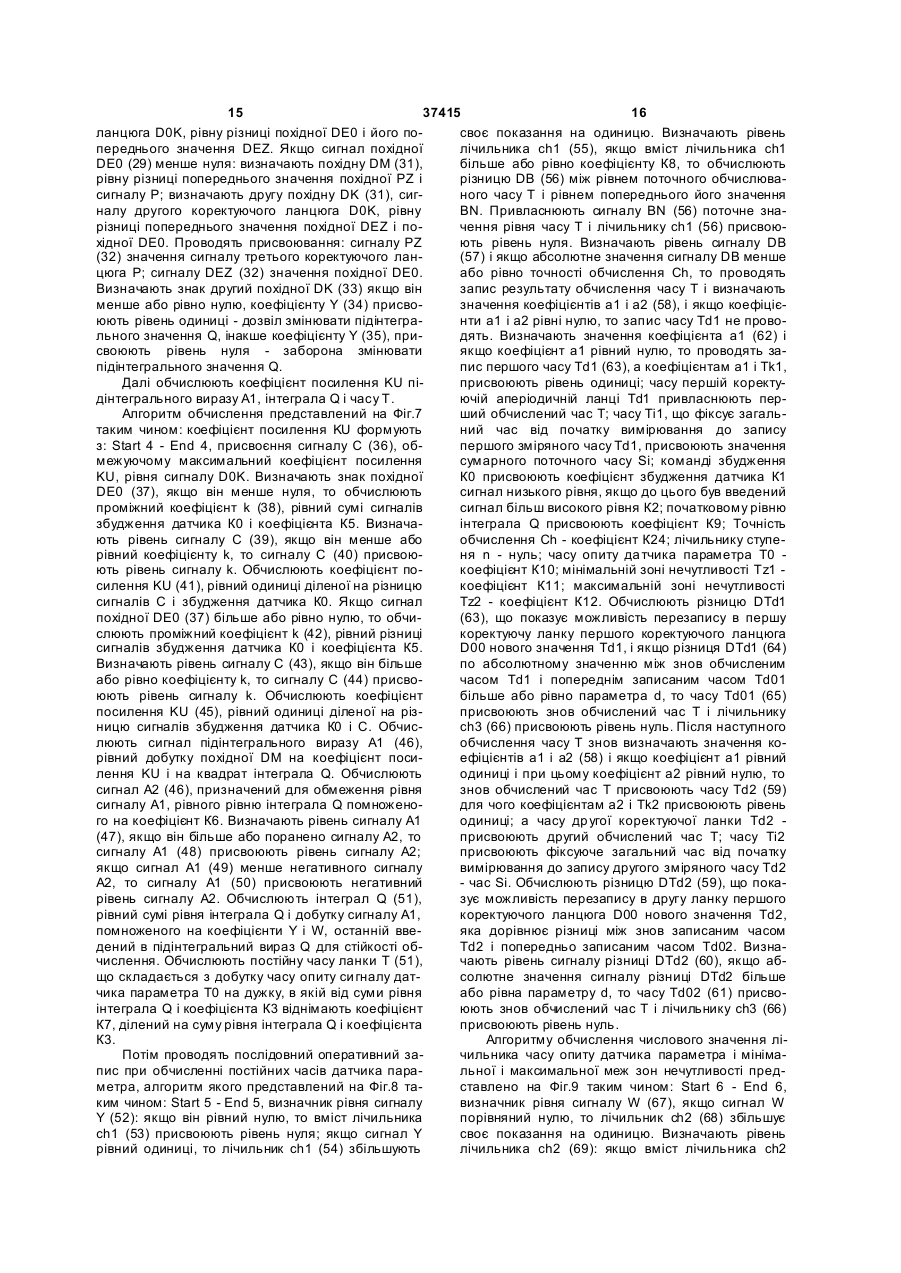
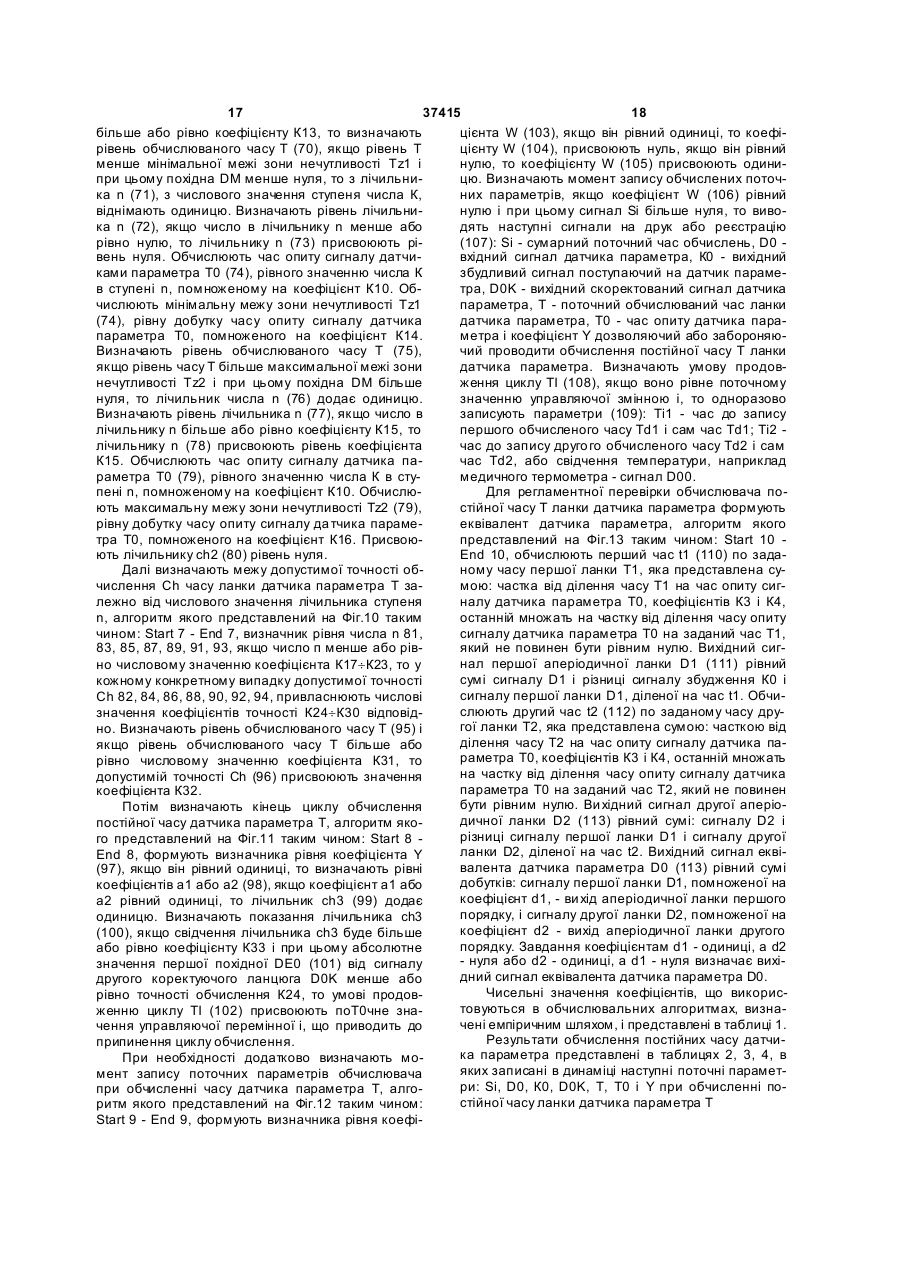
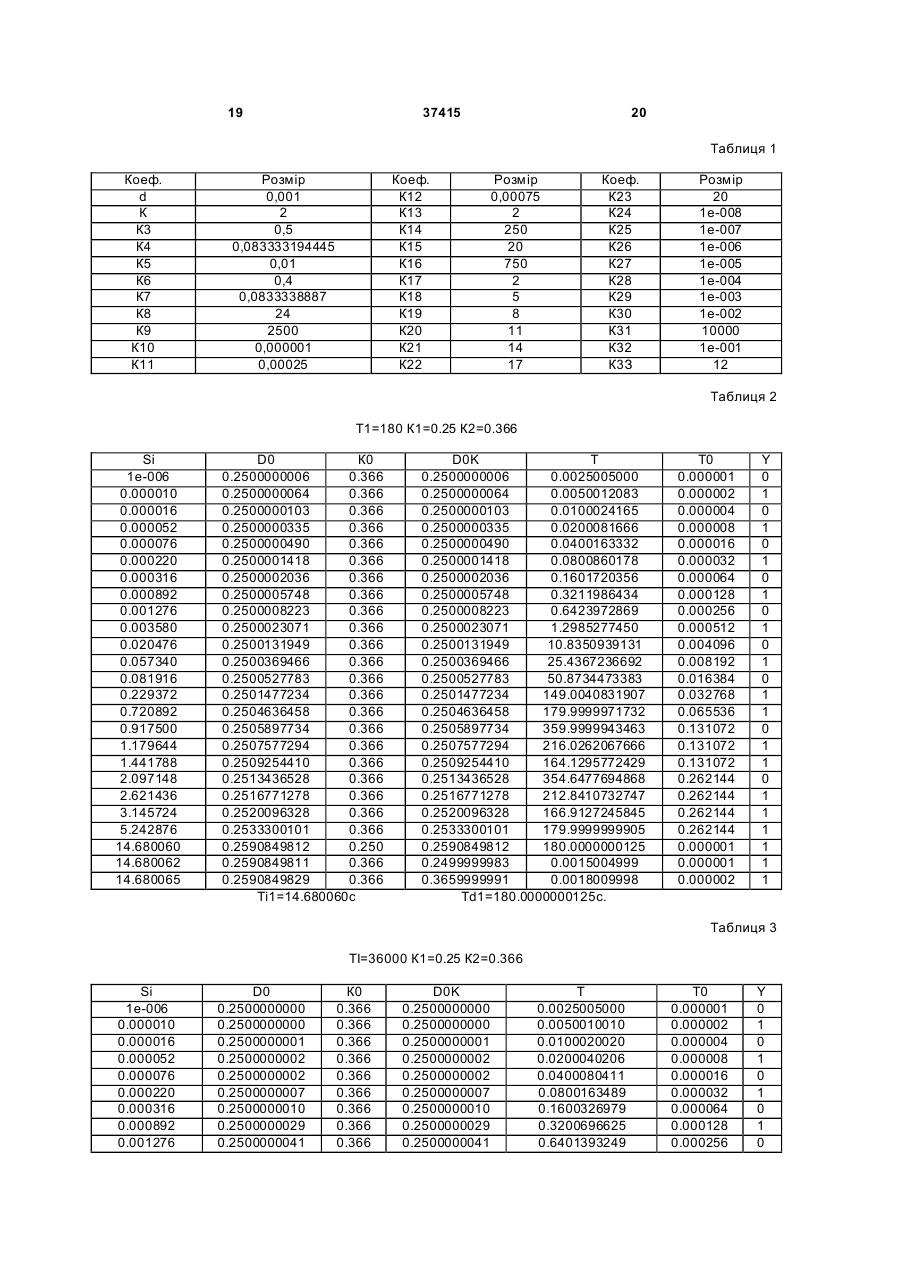
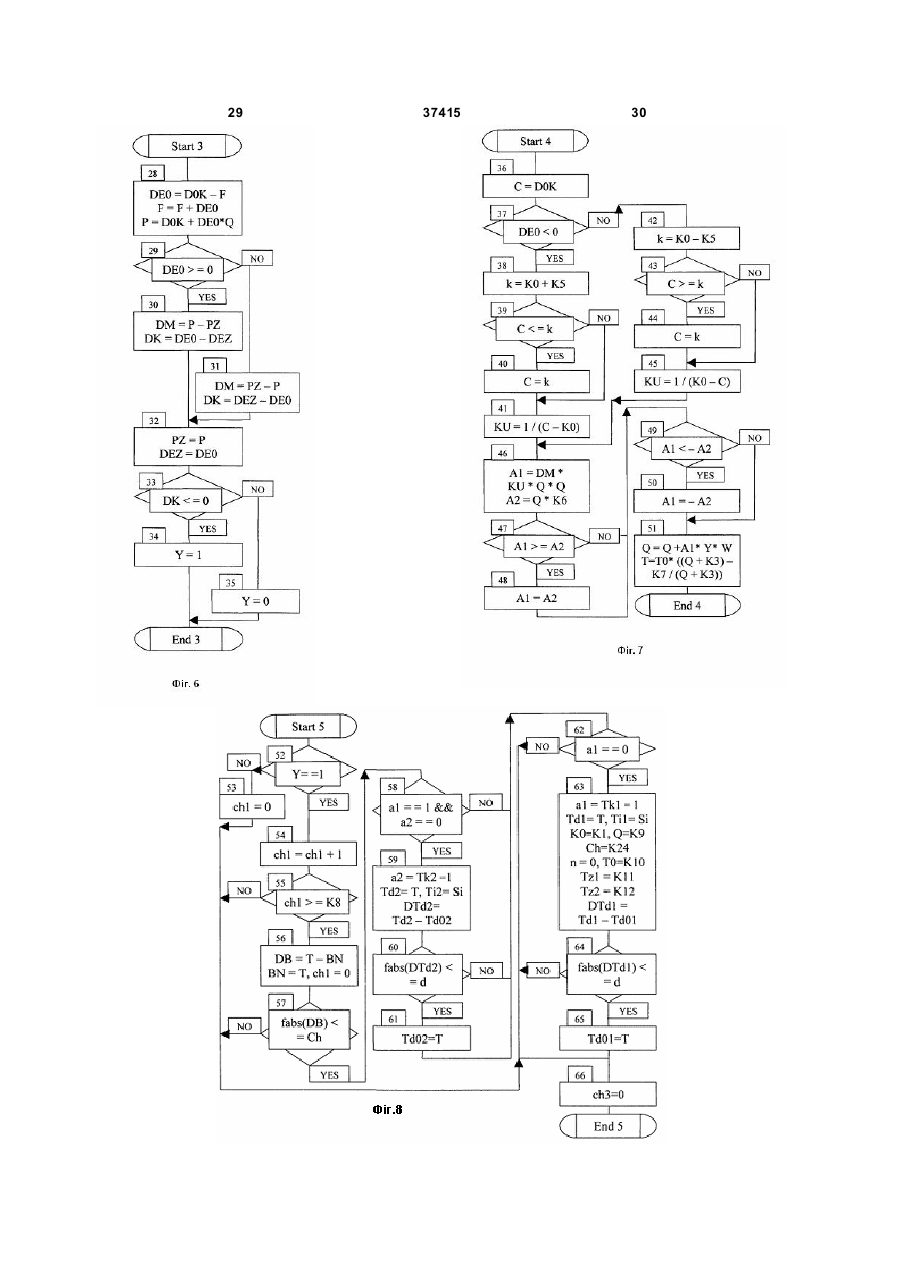
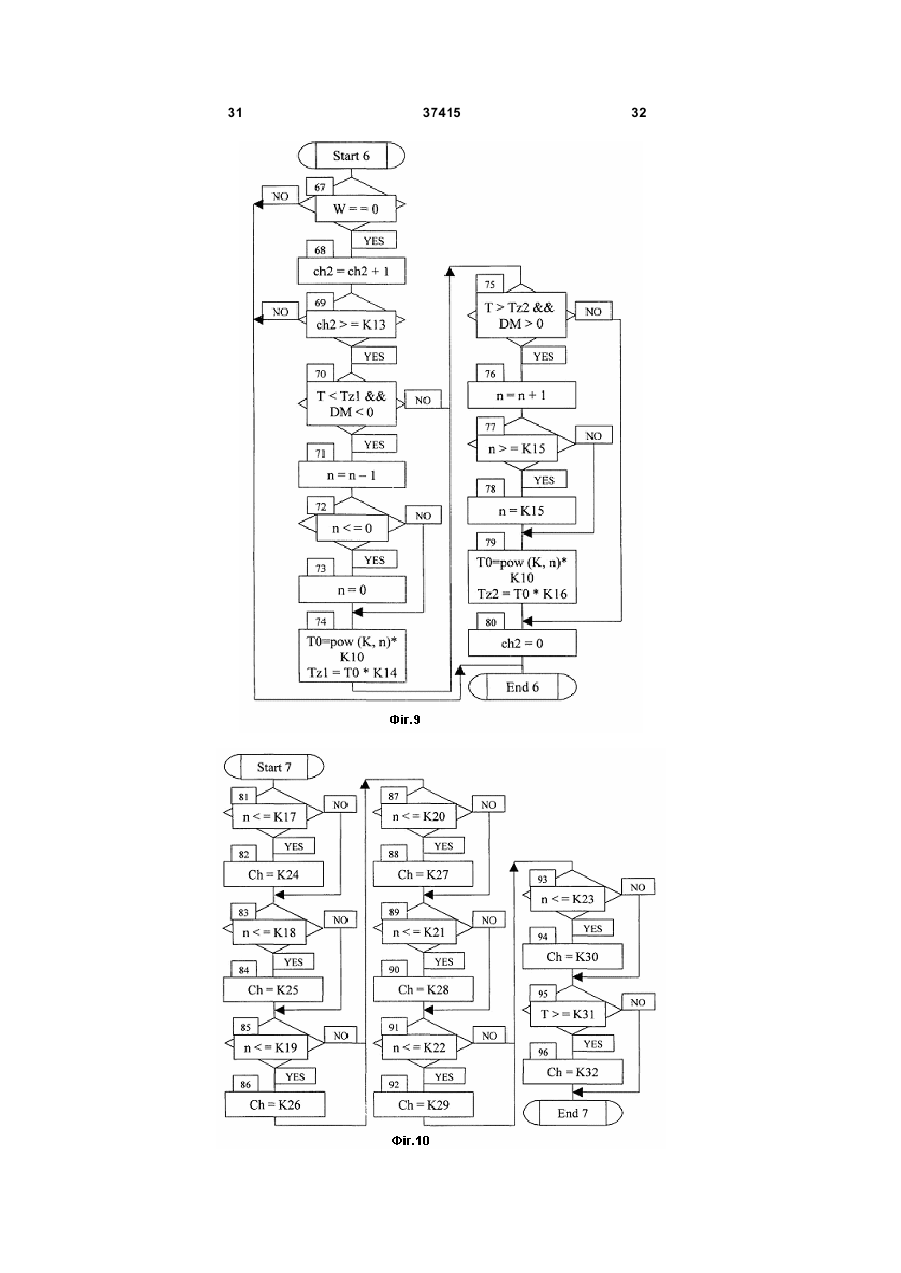
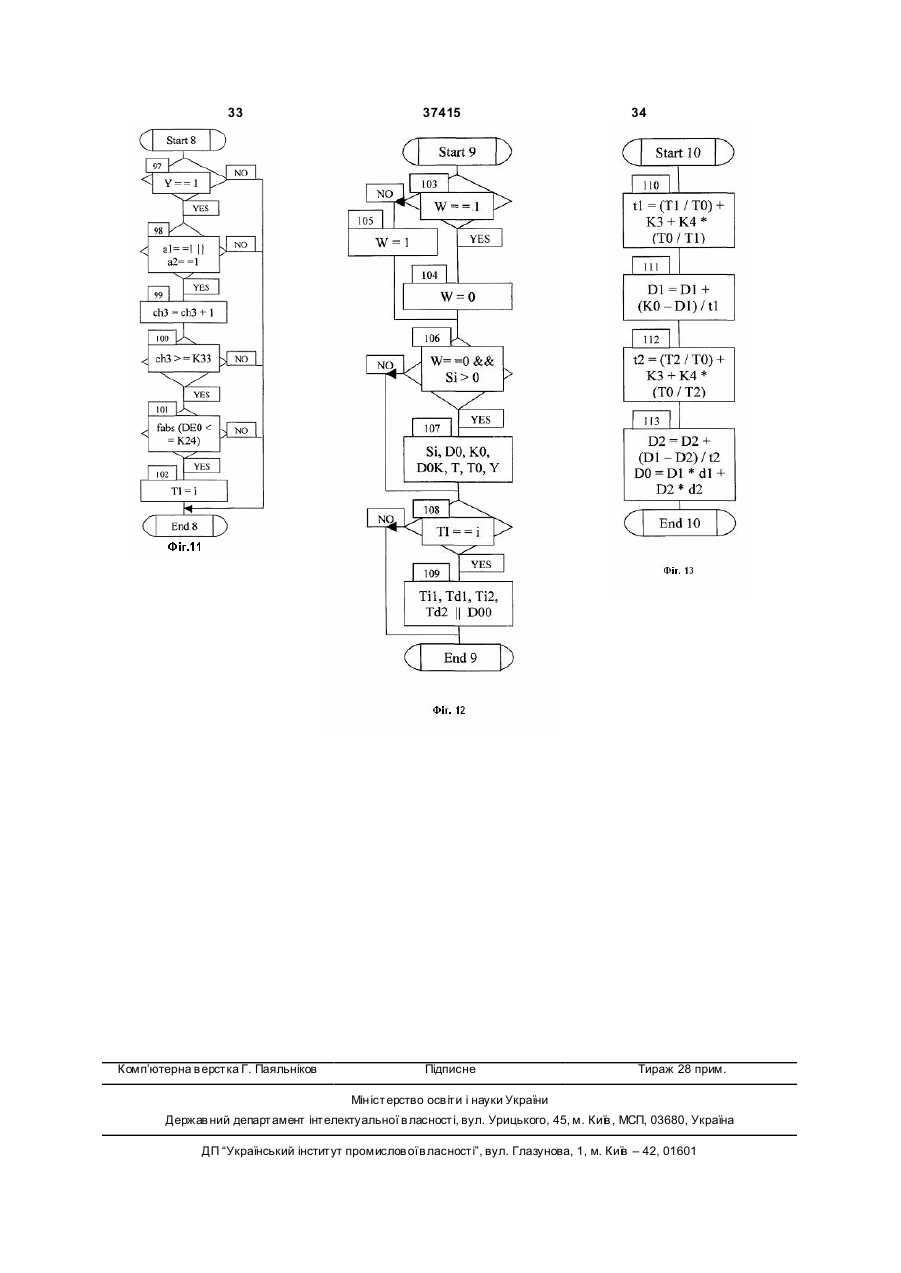
УКРАЇНА (19) UA (11) 37415 (13) U (51) МПК (2006) G01K 7/42 МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ ДЕРЖАВНИЙ Д ЕПАРТАМЕНТ ІНТЕЛ ЕКТУАЛЬНОЇ ВЛАСНОСТІ ОПИС в идається під в ідпов ідальність в ласника патенту ДО ПАТЕНТУ НА КОРИСНУ МОДЕЛЬ (54) ПРОЦЕС ДЛЯ П ЕРЕДВІЩЕННЯ ВІДПОВІДІ ДАТЧИКА ПАРАМЕТРА U (13) 37415 (11) визначають після запису обчислених часів, при цьому визначають абсолютне значення першої похідної (DB0) від сигналу другого коректуючого ланцюга (D0K), і якщо воно менше величини заданого коефіцієнта (К24), то продовженню циклу (ТІ) присвоюють поточне значення керуючої змінною (і), потім формують еквівалент вихідного сигналу датчика параметра (D0) для перевірки обчислювача постійної часу датчика параметра. 2. Процес за п. 1, який відрізняється тим, що вихідний сигнал першої коректуючої ланки (Р01) першого коректуючого ланцюга (D00) визначають по формулі: Р01=D0+С01*Кt01, де: Р01 - вихідний сигнал першої коректуючої ланки; D0 - вихідний сигнал датчика параметра; С01 - похідна сигналу датчика параметра; Кt01 - перший коефіцієнт посилення від першого часу Тd01; С01=D0-E01; Е01=Е01+С01; Е01 - інтеграл від похідної С01; Кt01=Тk01*((Td01/Т0)-К3+К4*(Т0/Td01)); Tk01 - коефіцієнт захисту; Td01 - перший час, першої коректуючої ланки; Т0 - час опиту датчика параметра; К3 - коефіцієнт, рівний 0,5; К4 - коефіцієнт, рівний 0,083333194445. 3. Процес за п. 1, який відрізняється тим, що вихідний сигнал другої коректуючої ланки першого коректуючого ланцюга (D00) визначають по формулі: D00=Р01+С02*Кt02, де: D00 - вихідний сигнал першого коректуючого ланцюга, відповідний вихідному сигналу др угої коректуючої ланки; Р01 - вихідний сигнал першої коректуючої ланки; С02 - похідна сигналу першої коректуючої ланки; Кt02 - другий коефіцієнт посилення від часу Td02; С02=Р01-Е02; Е02=Е02+С02; Е02 - інтеграл від похідної С02; Кt02= k02*((Td02/Т0)-К3+К4*(Т0/Td02)); Tk02 - коефіцієнт захисту; Td02 - другий час, др угої коректуючої ланки; Т0 - час опиту датчика параметра; К3 - коефіцієнт, рівний 0,5; UA (21) u200808284 (22) 19.06.2008 (24) 25.11.2008 (46) 25.11.2008, Бюл.№ 22, 2008 р. (72) БУЦЕНКО ВОЛОДИМИР МИКОЛАЙОВИЧ, U A (73) БУЦЕНКО ВОЛОДИМИР МИКОЛАЙОВИЧ, U A (57) 1. Процес для передвіщення відповіді датчика параметра, що включає визначення першої похідної і другої похідної вимірюваного параметра, який відрізняє ться тим, що визначають постійні часу ланок датчика параметра (D0), при цьому заздалегідь формують перший коректуючий ланцюг (D00), що складається принаймні з двох ланок, визначають вихідні сигнали кожної ланки ланцюга, потім вводять структур у повторення (for) і визначають час від початку обчислення (Si), потім формують другий коректуючий ланцюг (D0K), що складається принаймні з двох ланок, визначають вихідні сигнали кожної ланки ланцюга, після чого формують третій коректуючий ланцюг (Р), що складається з однієї ланки, визначають першу похідну (DM) ви хідного сигналу третього коректуючого ланцюга (Р) і обчислюють постійний час ланки (Т) датчика параметра (D0), після цього записують обчислений час (Т) і присвоюють його першому часу (Td1), який вводиться в першу ланку другого коректуючого ланцюга (D0K), потім визначають наступний параметр часу (Т) і присвоюють його другому часу (Td2), які потім вводять в другу ланку другого коректуючого ланцюга (D0K), при цьому поточний рівень обчислюваного часу (Т) визначають безперервно, і якщо він менше мінімальної межі зони нечутливості (Tz1) і при цьому похідна (DM) менше нуля, то лічильник ступеня (n) віднімає одиницю, а якщо (Т) більше максимальної межі зони нечутливості (Tz2) і при цьому похідна (DM) більше нуля, то лічильник ступеня (n) підсумовує одиницю, при цьому по поточному часу (Т) обчислюють нові значення часу опиту датчика параметра (Т0) і по його значенню визначають поточну мінімальну межу зони нечутливості (Tz1), коли лічильник ступеня (n) віднімає одиницю і поточну максимальну межу зони нечутливості (Tz2), коли лічильник ступеня (n) підсумовує одиницю, межі точності обчислення (Ch) обчислюваного часу (Т) визначають безперервно за показаннями лічильника ступеня (n), поточні параметри обчислювача записують безперервно, а час припинення циклу вимірювання 2 (19) 1 3 37415 4 К4 - коефіцієнт, рівний 0,083333194445. W - коефіцієнт стійкості обчислення інтеграла, 4. Процес за п. 1, який відрізняється тим, що час кожний такт, що змінюється, з нуля на одиницю і від початку обчислення (Si) до моменту запису (Т) навпаки; визначають по формулі: А1=DM*KU*Q2 ; Si=Si+Т0. DM - перша похідна вихідного сигналу третього 5. Процес за п. 1, який відрізняється тим, що викоректуючого ланцюга (Р); хідний сигнал першої коректуючої ланки (Р1) друKU - коефіцієнт посилення, залежний від рівня гого коректуючого ланцюга (D0K) визначають по вихідного сигналу другого коректуючого ланцюга формулі: D0K і сигналу збудження КО датчика параметра. Р1=D0+С1*Kt1, 8. Процес за п. 1, який відрізняється тим, що обде: Р1 - вихідний сигнал першої коректуючої ланчислення постійної часу ланки (Т) датчика парамеки; тра (D0) визначають залежно від часу опиту датD0 - вихідний сигнал датчика параметра; чика параметра (Т0) по наступній формулі: С1 - похідна сигналу датчика параметра; Т=Т0*((Q+К3)-К7/(Q+К3)), Kt1 - перший коефіцієнт посилення, від першого де: Т - постійна часу ланки датчика параметра D0; часу Td1; Т0 - час опиту датчика параметра; С1=D0-E1; Q - інтеграл; E1=E1+C1; К3 - коефіцієнт, рівний 0,5; E1 - інтеграл від похідної С1; К7 - коефіцієнт, рівний 0,0833338887. Kt1=Тk1*((Td1/Т0)-К3+К4*(Т0/Тd1)); 9. Процес за п. 8, який відрізняється тим, що час Тk1 - коефіцієнт захисту; опиту датчика параметра (Т0) визначають по фоTd1 - перший час, першої коректуючої ланки; рмулі: Т0 - час опиту датчика параметра; T0=pow(До, n)*К10, К3 - коефіцієнт, рівний 0,5; де: Т0 - час опиту датчика параметра; К4 - коефіцієнт, рівний 0,083333194445. pow (До, n) - число До в степені n; 6. Процес за п. 1, який відрізняється тим, що виК10 - коефіцієнт, рівний 0,000001. хідний сигнал другої коректуючої ланки другого 10. Процес за п. 1, який відрізняється тим, що коректуючого ланцюга (D0K) визначають по форвеличину мінімальної межі (Tz1) зони нечутливості мулі: визначають по формулі: D0K=Р1+С2*Kt2, Tz1=T0*K14, де: D0K - вихідний сигнал другого коректуючого де: Tz1 - мінімальна межа зони нечутливості; ланцюга, відповідний вихідному сигналу др угої К14 - коефіцієнт, рівний 250. коректуючої ланки; 11. Процес за п. 1, який відрізняється тим, що Р1 - вихідний сигнал першої коректуючої ланки; величину максимальної межі (Tz2) зони нечутлиС2 - похідна сигналу першої коректуючої ланки; вості визначають по формулі: Kt2 - другий коефіцієнт посилення, від другого часу Tz2=T0*K16, Td2; де: Tz2 - максимальна межа зони нечутливості; С2=Р1-Е2; К16 - коефіцієнт, рівний 750. Е2=Е2+С2; 12. Процес за п. 1, який відрізняється тим, що Е2 - інтеграл від похідної С2; величину першого вихідного сигналу (D1) еквіваKt2=Tk2*((Td2/Т0)-К3+К4*(Т0/Td2)); лента датчика параметра (D0) визначають по фоTk2 - коефіцієнт захисту; рмулі: Td2 - другий час др угої коректуючої ланки; D1=D1+(K0-D1)/t1, Т0 - час опиту датчика параметра; де: D1 - перший вихідний сигнал еквівалента датК3 - коефіцієнт, рівний 0,5; чика параметра (D0) (вихідний сигнал першої апеК4 - коефіцієнт, рівний 0,083333194445. ріодичної ланки (АПЛ); 7. Процес за п. 1, який відрізняється тим, що виК0 - сигнал збудження датчика параметра; хідний сигнал третього коректуючого ланцюга (Р) t1 - час першої аперіодичної ланки (АПЛ) від первизначають по формулі: шого часу, що задається (Т1); Р=D0K+DE0*Q, t1=(Т1/Т0)+К3+К4*(Т0/Т1); де: Р - вихідний сигнал третього коректуючого лаТ1 - перший час, що задається, першої ланки; нцюга; Т0 - час опиту датчика параметра; D0K - вихідний сигнал другого коректуючого ланК3 - коефіцієнт, рівний 0,5; цюга; К4 - коефіцієнт, рівний 0,083333194445. DE0 - перша похідна від вихідного сигналу другого 13. Процес за п. 1, який відрізняється тим, що коректуючого ланцюга D0K; величину другого ви хідного сигналу (D2) еквівалеQ - інтеграл, пропорційний обчислюваному часу Т; нта датчика параметра (D0) визначають по форDE0=D0K-F; мулі: F=F+DE0; D2=D2+(D1-D2)/12, F - інтеграл від похідної DE0; де: D2 - другий вихідний сигнал еквівалента датчиQ=Q+А1*Y*W; ка параметра (D0) (вихідний сигнал другої аперіоА1 - проміжна змінна, що керує інтегралом; дичної ланки); Y - коефіцієнт, що дозволяє/забороняє обчислюD1 - вихідний сигнал першої аперіодичної ланки; вати інтеграл, визначуваний через другу похідну t2 - час другої аперіодичної ланки (АПЛ) від другоDK від сигналу др угого коректуючого ланцюга D0K; го часу, що задається (Т2); t2=(Т2/Т0)+К3+К4*(Т0/Т2); 5 37415 6 Т2 - другий час, що задається, другої ланки; D0=D1*d1+D2*d2, Т0 - час опиту датчика параметра; де: D1 - вихідний сигнал першої аперіодичної ланК3 - коефіцієнт, рівний 0,5; ки; К4 - коефіцієнт, рівний 0,083333194445. d1 - коефіцієнт вибору, якщо він рівний одиниці, Т0 14. Процес за п. 1, який відрізняється тим, що коефіцієнт вибору d2, рівний нулю і навпаки; перевірку обчислювача проводять по вихідному D2 - вихідний сигнал другої аперіодичної ланки; сигналу еквівалента датчика параметра (D0): d2 - коефіцієнт вибору. Корисна модель відноситься до вимірювальної техніки і може бути використана в різних областях науки і техніки, особливо в енергетиці, наприклад, при вимірюванні температур атомних реакторів, парогенераторів, стопорно-регулюючих клапанів, циліндрів турбін, що мають великі металеві маси. Визначення передвіщення відповіді датчика вимірюваного параметра є вельми актуальним. При цьому важливим є визначення передвіщення відповіді датчика параметра без запізнювання, наприклад, при експлуатації атомних станцій для визначення точної температури, що використовується в зворотному зв'язку регуляторів температур при змінних режимах експлуатації, дозволяє підвищити надійність роботи технологічного устаткування блоків атомних станцій в цілому. Крім того, важливим є скорочення часу запізнювання датчиків параметра при визначенні параметрів медичних термометрів, вимірників потужності і інших параметричних датчиків, а також при дослідженні і наладці систем автоматичного регулювання. Найближчим до технічного рішення, що заявляється, є процес для передвіщення відповіді датчика параметра [1], що включає визначення першої похідної і другої похідної вимірюваного параметра. При цьому визначають середнє значення першої похідної і другої похідної вимірюваного параметра, засноване на певній кількості вимірювань температурних зразків з урахуванням чинника надбавки до кожного середнього значення обчисленої температури. Час передвіщення відповіді датчика параметра складає близько двох секунд. Даний спосіб дозволяє одержати передвіщення відповіді датчика параметра. Проте, до недоліків способу відноситься те, що передвіщення датчика параметра визначають із запізнюванням, що знижує точність вимірювання. Це обумовлено тим, що даний спосіб не враховує постійні часу, що входять в передавальні функції датчиків параметра, що знижує швидкість вимірювання параметра. У основу корисної моделі поставлена задача створення такого процесу для передвіщення відповіді датчика параметра, в якому шляхом формування декількох коректуючи х ланцюгів, гн учкого управління вхідним сигналом аперіодичних ланок і визначення постійних часу аперіодичних ланок першого і другого порядку, що входять в передавальну функцію датчика параметра, досягається підвищення точності і швидкодії вимірювання параметрів. Поставлена задача вирішується тим, що у відомому процесі для передвіщення відповіді датчика параметра, що включає визначення першої по хідної і другої похідної вимірюваного параметра, згідно корисної моделі, визначають постійні часу ланок датчика параметра (D0), при цьому заздалегідь формують перший коректуючий ланцюг (D00), що полягає по менше мірі з двох ланок, визначають вихідні сигнали кожної ланки ланцюга, потім вводять структуру повторення (for), і визначають час від початку обчислення (Si), потім формують другий коректуючий ланцюг (D0K), що полягає по менше мірі з двох ланок, визначають вихідні сигнали кожної ланки ланцюга, після чого формують третій коректуючий ланцюг (Р), що складається з однієї ланки, визначають першу похідну (DM) ви хідного сигналу третього коректуючого ланцюга (Р) і обчислюють постійний час ланки (Т) датчика параметра (D0), після цього записують обчислений час (Т) і привласнюють його першому часу (Td1), яке вводиться в першу ланку, друго го коректуючого ланцюга (D0K), потім визначають наступний параметр часу (Т) і привласнюють його другому часу (Td2), які потім вводять в другу ланку, другого коректуючого ланцюга (D0K), при цьому поточний рівень обчислюваного часу (Т) визначають безперервно, і якщо він менше мінімальної межі зони нечутливості (Tz1) і при цьому похідна (DM) менше нуля, то лічильник ступеня (n) віднімає одиницю, а якщо (Т) більше максимальної межі зони нечутливості (Tz2) і при цьому похідна (DM) більше нуля, то лічильник ступеня (n) підсумовує одиницю, при цьому по поточному часу (Т) обчислюють нові значення часу опиту датчика параметра (Т0) і по його значенню визначають поточну мінімальну межу зони нечутливості (Tz1), коли лічильник ступеня (n) віднімає одиницю і поточну максимальну межу зони нечутливості (Tz2), коли лічильник ступеня (n) підсумовує одиницю, межі точності обчислення (Ch) обчислюваного часу (Т) визначають безперервно за свідченнями лічильника ступеня (n), поточні параметри обчислювача записують безперервно, а час припинення циклу вимірювання визначають після запису обчислених часів, при цьому визначають абсолютне значення першої похідної (DB0) від сигналу другого коректуючого ланцюга (D0K), і якщо воно менше величини заданого коефіцієнта (К24), то продовженню циклу (ТІ) привласнюють поточне значення управляючої змінною (і), потім формують еквівалент вихідного сигналу датчика параметра (D0) для перевірки обчислювача постійної часу датчика параметра. При цьому вихідний сигнал першої коректуючої ланки (Р01) першого коректуючого ланцюга (D00) визначають по формулі: Р01=D0+С01*Кt01 7 37415 8 де: Р01 - вихідний сигнал першої коректуючої Р1 - вихідний сигнал першої коректуючої ланланки; ки; D0 - вихідний сигнал датчика параметра; С2 - похідна сигналу першої коректуючої ланС01 - похідна сигналу датчика параметра; ки; Кt01 - перший коефіцієнт посилення від перKt2 - другий коефіцієнт посилення, від другого шого часу Td01; часу Td2; С01=D0-E01; С2=Р1-Е2; Е01=Е01+С01; Е2=Е2+С2; Е01 - інтеграл від похідної С01; Е2 - інтеграл від похідної С2; Кt01=Тk01*((Td01/Т0)–К3+К4* (Т0/Td01)); Kt2=Tk2*((Td2/Т0)-К3+К4*(Т0/Td2)); Tk01 - коефіцієнт захисту; Tk2 - коефіцієнт захисту; Td01 - перший час першої коректуючої ланки; Td2 - другий час др угої коректуючої ланки; T0 - час опиту датчика параметра; Т0 - час опиту датчика параметра; К3 - коефіцієнт, рівний 0,5; К3 - коефіцієнт, рівний 0,5; К4 - коефіцієнт, рівний 0,083333194445. К4 - коефіцієнт, рівний 0,083333194445. Крім того, вихідний сигнал другої коректуючої Переважно вихідний сигнал третього коректуланки першого коректуючого ланцюга (D00) визнаючого ланцюга (Р) визначати по формулі: чають по формулі: Р=D0K+DEO*Q D00=Р01+С02*Кt02 де: Р - ви хідний сигнал третього коректуючого де: D00 - вихідний сигнал першого коректуюланцюга; чого ланцюга, відповідний вихідному сигналу друD0K - вихідний сигнал другого коректуючого гої коректуючої ланки; ланцюга; Р01 - вихідний сигнал першої коректуючої ланDE0 - перша похідна від вихідного сигналу ки; другого коректуючого ланцюга D0K; С02 - похідна сигналу першої коректуючої ланQ - інтеграл, пропорційний обчислюваному чаки; су Т; Кt02 - другий коефіцієнт посилення від часу DE0=D0K-F; Td02; F=F+DE0; С02=Р01-Е02; F - інтеграл від похідної DE0; Е02=Е02+С02; Q=Q+А1*Y*W; Е02 - інтеграл від похідної С02; А1 - проміжна змінна, що управляє інтегралом; Кt02=Tk02*((Td02/Т0)-К3+К4*(Т0/Td02)); Y - коефіцієнт, що дозволяє/забороняє обчисTk02 - коефіцієнт захисту; лювати інтеграл, визначуваний через другу похідTd02 - другий час др угої коректуючої ланки; ну DK від сигналу другого коректуючого ланцюга Т0 - час опиту датчика параметра; D0K; К3 - коефіцієнт, рівний 0,5; W - коефіцієнт стійкості обчислення інтеграла, К4 - коефіцієнт, рівний 0,083333194445. кожний такт, що змінюється, з нуля на одиницю і При цьому час від початку обчислення (Si) до навпаки; моменту записи (Т) визначають по формулі: А1=DM*KU*Q2 ; Si=Si+Т0. DM - перша похідна вихідного сигналу третьоДоцільно вихідний сигнал першої коректуючої го коректуючого ланцюга (Р); ланки (Р1) другого коректуючого ланцюга (D0K) KU - коефіцієнт посилення, залежний від рівня визначати по формулі: вихідного сигналу другого коректуючого ланцюга Р1=D0+С1*Kt1 D0K і сигналу збудження K0 датчика параметра. де: Р1 - вихідний сигнал першої коректуючої Крім того, обчислення постійної часу ланки (Т) ланки; датчика параметра (D0) визначають залежно від D0 - вихідний сигнал датчика параметра; час опиту датчика параметра (Т0) по наступній С1 - похідна сигналу датчика параметра; формулі: Kt1 - перший коефіцієнт посилення від першоT=Т0*((Q+К3)-К7/(Q+К3)) го часу Td1; де: Т - постійна часу ланки датчика параметра С1=D0-E1; D0; Е1=Е1+С1; Т0 - час опиту датчика параметра; Е1 - інтеграл від похідної С1; Q - інтеграл; Kt1=Tk1*((Td1/Т0)-К3+К4*(Т0/Td1)); К3 - коефіцієнт, рівний 0,5; Tk1 - коефіцієнт захисту; К7 - коефіцієнт, рівний 0,0833338887. Td1 - перший час, першої коректуючої ланки; Доцільно час опиту датчика параметра (Т0) Т0 - час опиту датчика параметра; визначати по формулі: К3 - коефіцієнт, рівний 0,5; T0=pow(K, n)*K10 К4 - коефіцієнт, рівний 0,083333194445. де: Т0 - час опиту датчика параметра; Крім того, вихідний сигнал другої коректуючої pow (К, n) - число К в ступені n; ланки другого коректуючого ланцюга (D0K) визнаК - коефіцієнт, рівний 2; чають по формулі: К10 - коефіцієнт, рівний 0,000001. D0K=Р1+С2*Kt2 При цьому величину мінімальної межі (Tz1) де: D0K - вихідний сигнал другого коректуючозони нечутливості визначають по формулі: го ланцюга, відповідний вихідному сигналу др угої Tz1=T0*K14 коректуючої ланки; де: Tz1 - мінімальна межа зони нечутливості; 9 37415 10 К14 - коефіцієнт рівний 250. Вихідний сигнал АПЛ, визначений по формулі Крім того, величину максимальної межі (Tz2) (1), замінюють вихідним сигналом розробленої зони нечутливості визначають по формулі: ланки АПЛ, і визначають по наступній формулі: Tz2=T0*K16 Хви х=Хви х+(Хвх-Хви х)/Тапл (2) де: Tz2 - максимальна межа зони нечутливосде: Хвих - ви хідний сигнал АПЛ; ті; Хвх - вхідний сигнал змінюється від нуля до К16 - коефіцієнт, рівний 750. одиниці при східчастому сигналі збудження; Переважно величину першого вихідного сигТапл - постійна часу нового АПЛ. налу (D1) еквівалента датчика параметра (D0) Вихідні сигнали АПЛ, представлені формулавизначати по формулі: ми (1) і (2), відрізняються по точності своїми переD1=D1+(K0-D1)/t1 хідними характеристиками. Експериментально з де: D1 - перший вихідний сигнал еквівалента урахуванням введених постійних коефіцієнтів було датчика параметра (D0) (вихідний сигнал першої скоректовано новий час Тапл відповідне часу Т, аперіодичної ланки); який визначають по наступній формулі: К0 - сигнал збудження датчика параметра; Тапл=(Т/Т0)+К3+К4*(Т0/Т) (3) t1 - час першої аперіодичної ланки від першого де: Тапл - скоректована постійна часу АПЛ; часу, що задається (Т1); T - постійна часу АПЛ, яка не повинна бути ріt1=(Т1/Т0)+К3+К4*(Т0/Т1); вна нулю; Т1 - перший час, що задається, першої ланки; Т0 - час опиту датчика параметра; Т0 - час опиту датчика параметра; К3 - коефіцієнт, рівний 0,5; К3 - коефіцієнт, рівний 0,5; К4 - коефіцієнт, рівний 0,083333194445. К4 - коефіцієнт, рівний 0,083333194445. Одержана таким чином скоректована постійна Крім того, величину другого вихідного сигналу часу АПЛ підви щує точність передачі між перехід(D2) еквівалента датчика параметра (D0) визнаними характеристиками АПЛ, представлені форчають по формулі: мулами (1) і (2), з точністю до 15 знаку після коми. D2=D2+(D1-D2)/t2 Алгоритм формування вихідного сигналу АПЛ, де: D2 - другий вихідний сигнал еквівалента представлений формулами (2) і (3), використовудатчика параметра (D0) (відповідає вихідному сигють надалі при регламентній перевірці всього алналу другої аперіодичної ланки); горитму обчислювача постійних часу ланок датчиD1 - вихідний сигнал першої аперіодичної ланка параметра як одна ланка еквівалента датчика ки; параметра. t2 - час другої аперіодичної ланки від другого Вихідний сигнал форсуючої ланки (ФЛ) часу, що задається (Т2); звичайно перевіряють при вхідному сигналі від t2=(Т2/Т0)+К3+К4*(Т0/Т2); нуля до одиниці і початковому нульовому часі по Т2 - другий час, що задається, другої ланки; наступній формулі: Т0 - час опиту датчика параметра; Xви х=e xp(-t/Td) (4) К3 - коефіцієнт, рівний 0,5; де: Хвих - ви хідний сигнал ФЛ; К4 - коефіцієнт, рівний 0,083333194445. t - сумарний поточний час; При цьому перевірку обчислювача проводять Td - постійна часу ФЛ. по вихідному сигналу еквівалента датчика парамеСигнал форсуючої ланки, визначений по фортра (D0): мулі (4), замінюють сигналом розробленої форсуD0=D1*d1+D2*d2 ючої ланки, і визначають по наступній формулі: де: D1 - вихідний сигнал першої аперіодичної Хви х=С*КТ (5) ланки; де: Хвих - ви хідний сигнал форсуючої ланки d1 - коефіцієнт вибору, якщо він рівний одини(ФЛ); ці, то коефіцієнт вибору d2 рівний нулю і навпаки; С - похідна вхідного сигналу Хвх; D2 - вихідний сигнал другої аперіодичної ланКТ - коефіцієнт посилення, відповідний постійки, відповідний двом ланкам; ній часу Td. d2 - коефіцієнт вибору. При цьому похідна С вхідного сигналу Хвх виДля удосконалення процесу прогнозу відповіді значають по формулі: С=Хвх-Е (5.1) датчика вимірюваного параметра послідовно сфоде: Хвх - вхідний сигнал змінюється від нуля рмовано три коректуючі ланцюги, що складаються до одиниці, при східчастому сигналі збудження; з елементарних аперіодичних і форсуючи х ланок, Е - інтеграл від похідної С. які розроблені спеціально для гнучкого управління При цьому інтеграл Е від похідної С визначавхідним сигналом, які також входять в передавають по наступній формулі: льну функцію еквівалента датчика параметра. При Е=Е+С (5.2) цьому коефіцієнт пропорційності ланок прийнятий Вихідні сигнали форсуючих ланок, представрівним одиниці. лені формулами (4) і (5), відрізняються по точності Вихідний сигнал аперіодичної ланки (АПЛ) своїми перехідними характеристиками. Експерипершого порядку звичайно визначають при вхідментально визначений скоректований коефіцієнт ному сигналі від нуля до одиниці і початковому посилення похідної вихідного сигналу КТ з урахунульовому часі по наступній формулі: ванням введених постійних коефіцієнтів і постійноХви х=1-exp(-t/T) (1) го часу форсуючої ланки Td, який визначають по де: Хвих - ви хідний сигнал АПЛ; наступній формулі: t - сумарний поточний час; КТ=Kz*((Td/Т0)-К3+К4*(Т0/Td)) (6) Т - постійна часу АПЛ. де: КТ - скоректований коефіцієнт посилення; 11 37415 12 Kz - коефіцієнт захисту; ка параметра; на Фіг.11 - блок - схема алгоритму Td - постійна часу ФЛ; визначення кінця циклу обчислення постійних чаТ0 - час опиту датчика параметра; сів ланки датчика параметра; на Фіг.12 - блок К3 - коефіцієнт, рівний 0,5; схема алгоритму визначення моменту запису поК4 - коефіцієнт, рівний 0,083333194445. точних параметрів обчислювача при обчисленні Одержаний таким чином скоректований коефічасу датчика параметра; на Фіг.13 - блок - схема цієнт посилення похідної вихідного сигналу КТ алгоритму визначення еквівалента датчика парапідвищує точність передачі між перехідними прометра. цесами вихідних сигналів форсуючи х ланок, предПроцес для прередвіщення відповіді датчика ставленими формулами (4) і (5), з точністю до 15 параметра здійснюється таким чином. знаку після коми. Алгоритм обчислення відповіді датчика параАлгоритм формування вихідного сигналу форметра приведений на Фіг.1. суючої ланки, визначений формулою (5), викорисВхідний сигнал датчика параметра D0 постутовують надалі в послідовному коректуючому припає, наприклад, на одну ланку послідовного корекстрої (ПКП) безпосередньо в ланцюзі датчика туючого ланцюга, що складається з першого сумапараметра і в самому обчислювачі часів датчика тора S1, на перший вхід якого поступає вхідний параметра. сигнал датчика D0, на другий вхід поступає сигнал Вихідний сигнал послідовного коректуючого інтегратора Е1 із зворотним знаком від першої пристрою (ПКП) визначають залежно від сигналу похідної С1. датчика параметра і вихідного форсуючого сигнаНа другий суматор 12, на перший вхід постулу, помноженого на коефіцієнт посилення відповіпає вхідний сигнал датчика D0, а на другий вхід дний часу однієї форсуючої ланки і визначають по поступає перша похідна датчика С1, помножена на наступній формулі: коефіцієнт посилення Kt1, відповідний обчисленоХви х=Хвх+С*КТк (7) му часу ланки датчика параметра Td1. де: Хвих - ви хідний сигнал ПКП; Скорегований коефіцієнт посилення Kt1 виХвх - вхідний сигнал; значаємо аналогічно по формулі 6, приведеної С - похідна вхідного сигналу Хвх; раніше. КТk - скоректований коефіцієнт посилення (виПри цьому коефіцієнт посилення КТ позначазначається аналогічно по формулі 6). ємо як Kt1, а коефіцієнт захисту Kz представляємо Таким чином, визначені постійні часу аперіояк Тk1 і таким чином, обчислення коефіцієнта подичних ланок першого і другого порядку, що вхосилення Kt1 проводять відповідно до формули: дять в передавальну функцію датчика параметра, Kt1=Tk1*((TcH/Т0)-К3+К4*(Т0/Td1)). (8) що значно підвищує швидкодію і точність вимірюВихід друго го суматора D0K залежно від ввевання параметрів. деного або не введеного часу Td1 є скоректоваСуть корисної моделі пояснюється на кресним або не скоректованим сигналом датчика паленнях, де на Фіг.1 представлена структура зв'язку раметра D0. між ланками обчислювача часу; на Фіг.2 - блок Далі вважають, що чac Td1 не був введений, схема алгоритму формування захисних коефіцієнкоефіцієнт захисту Тk1 рівний нулю, і тоді вихідний тів першого коректуючого ланцюга, залежно від сигнал D0K відповідатиме вхідному сигналу датчирівня часів, що вводяться; на Фіг.3 - блок - схема ка параметра D0. алгоритму першого коректуючого ланцюга, розміОбчислювач постійної часу датчика параметра щеного послідовно з датчиком параметра з ввескладається з послідовного коректуючого ланцюга денням до двох часів у міру їх обчислення; на Фіг.4 з інтегратором F замість Е1 першою похідною дат- блок-схема алгоритму формування захисних кочика DE0 замість С1, помноженої на значення інефіцієнтів другого коректуючого ланцюга залежно тегратора Q, замість Kt1, і вихідного сигналу Р, від рівня коефіцієнтів, що визначають запис обчизамість D0K. слених часів датчика параметра; на Фіг.5 - блокОбчислюють рівень інтеграла Q, який відповісхема алгоритму другого коректуючого ланцюга дає обчислюваній постійній часу датчика параметобчислювача часів датчика параметра, розміщера Т. Первоначально обчислюють похідну DM сигного послідовно з датчиком параметра з введенналу Р, знак якої визначають залежно від знаку ням в них двох часів у міру їх обчислення; на Фіг.6 першої похідної DE0 вхідного сигналу датчика па- блок-схема алгоритму третього коректуючого раметра D0. ланцюга, розміщеного послідовно з другим корекПотім обчислюють другу похідну DK, яка необтуючим ланцюгом з введенням в нього замість хідна для обчислення коефіцієнта Y - коефіцієнта, коефіцієнта посилення - сигналу обчислюваного що дозволяє/забороняє обчислювати інтеграл, інтеграла; на Фіг.7 - блок-схема алгоритму обчисвизначуваний через другу по хідну DK від сигналу лення: підінтегрального виразу, коефіцієнта посидругого коректуючого ланцюга D0K. Якщо друга лення підінтегрального виразу і часу ланки датчипохідна DK вхідного сигналу D0K менше або рівно ка параметра; на Фіг.8 - блок-схема алгоритму нулю, то коефіцієнту Y привласнюють рівень одипослідовного оперативного запису при обчисленні ниці, що дозволяє зміни підінтегрального виразу постійних часів датчика параметра; на Фіг.9 - блокQ, якщо друга похідна DK більше нуля, то коефіцісхема алгоритму обчислення числового значення єнту Y присвоюють рівень нуля, що забороняє лічильника часу опиту датчика параметра, мінімазміни підінтегрального виразу Q. льної і максимальної меж зон нечутливості; на Далі обчислюють сигнал підінтегрального виФіг.10 - блок-схема алгоритму визначення межі разу А1 інтеграла Q, який є добутком сигналів: допустимої точності обчислення часу ланки датчипохідної DM на коефіцієнт посилення KU і на квад 13 37415 14 рат інтеграла Q. Перед введенням сигналу А1 в коефіцієнтів, що визначають запис обчислених підінтегральний вираз Q сигнал А1 обмежують по часів датчика параметра, представлений на Фіг.4 і рівню з двох сторін. складається з: Start 2.1 - End 2.1, визначник рівня Потім обчислюють інтеграл Q, рівний сумі інтекоефіцієнта а1 (13), якщо він рівний нулю, Т0 захиграла Q і сигналу А1, помноженого на коефіцієнти сному коефіцієнту Тk1 (14) привласнюють рівень W і Y. нуля, інакше коефіцієнту Тk1 (15) присвоюють ріДалі обчислюють постійну часу ланки датчика вень одиниці; визначник рівня коефіцієнта а2 (16), параметра Т з урахуванням відповідних постійних якщо він рівний нулю, то захисному коефіцієнту коефіцієнтів по наступній формулі: Тk2 (17) присвоюють рівень нуля; інакше коефіцієТ=Т0*((Q+К3)-К7/(Q+К3)) (9) нту Тk2 (18) присвоюють рівень одиниці. де: Т - постійний час ланки датчика параметра Алгоритм друго го коректуючого ланцюга обчиD0; слювача часів датчика параметра, розміщеного Т0 - час опиту датчика параметра; послідовно з датчиком параметра з введенням в Q - сигнал інтеграла; них дво х часів у міру їх обчислення представлений К3 - коефіцієнт, рівний 0,5; на Фіг.5 і складається з: Start 2.2 - End 2.2, струкК7 - коефіцієнт, рівний 0,0833338887. тури повторення for (19), в яку входять: управляюАлгоритм формування захисних коефіцієнтів ча змінна і, умови продовження циклу ТІ, сума Тk01 і Тk02 першого коректуючого ланцюга залежуправляючої змінною і++. Обчислюють сумарний но від рівня часів, що вводяться, приведений на поточний час від початку обчислення Si (19). ОбФіг.2 таким чином: Start 1.1 - End 1.1, що складачислення першої коректуючої ланки Р1, другого ється з першого коректуючого ланцюга D00, що коректуючого ланцюга D0K, що складається з обвключає визначника рівня першого часу Td01 (1), і числення: похідної С1 (20) сигналу датчика D0 і якщо воно менше або рівно нулю, Т0 захисному інтегральної складової Е1 (20) від похідної сигналу коефіцієнту Тk01 (2) присвоюють рівень нуля, інС1. Формують коефіцієнт посилення Kt1 (21), від акше коефіцієнту Тk01 (3) присвоюють рівень одипершого часу Td1, що складається з твору коефіниці. Визначника рівня другого часу Td02 (4), якщо цієнта захисту Тk1, помноженого на дужку, в якій воно менше або рівно нулю, то захисному коефіцічастку від ділення першого часу Td1 на час опиту єнту Тk02 (5) присвоюють рівень нуля, інакше косигналу датчика Т0, віднімають коефіцієнт К3, до ефіцієнту Тk02 (6) присвоюють рівень одиниці. нього додають коефіцієнт К4, помножений на частПотім на Фіг.3 приведений алгоритм першого ку від ділення часу опиту сигналу датчика Т0 на коректуючого ланцюга D00, розміщеного послідовперших порах Td1. Обчислення сигналу першої но з датчиком параметра D0 з введенням до двох коректуючої ланки Р1 (22), рівної сумі: сигналу часів у міру їх обчислення: Start 1.2 - End 1.2, обдатчика параметра D0 і похідної С1 помноженої на числюють похідну С01 (7) сигналу датчика D0 і коефіцієнт посилення Kt1. Обчислення другої коінтегральної складової Е01 (7) від похідної С01. ректуючої ланки D0K, що складається з обчисленФормують коефіцієнт посилення Кt01 (8) від перня: похідної С2 (23) сигналу Р1 і інтегральної склашого часу Td01, що складається з добутку коефідової Е2 (23) від похідної С2. Формують коефіцієнт цієнта захисту Тk01 помноженого на дужку, в якій посилення Kt2 (24), від другого часу Td2, що склавід приватного від розподілу першого часу Td01 на дається з добутку коефіцієнта захисту Тk2 помночас опиту сигналу датчика Т0, віднімають коефіціженого на дужку, в якій від частки від ділення друєнт К3, до нього додають коефіцієнт К4 помножегого часу Td2 на час опиту датчика Т0, віднімають ний на приватне від розподілу часу опиту сигналу коефіцієнт К3, до нього додають коефіцієнт К4, датчика Т0 на перших порах Td01. Обчислюють помножений на частку від ділення часу опиту сигсигнал першої коректуючої ланки Р01 (9), рівної налу датчика Т0 на другий час Td2. Обчислюють сумі: сигналу датчика параметра D0 і похідної С01 вихідний сигнал другого коректуючого ланцюга помноженої на коефіцієнт посилення Кt01. ОбчисD0K (25), рівний сумі сигналу першої коректуючої люють друге коректуюче ланку, що складається з ланки Р1 і його похідної С2, помноженої на коефіобчислення: похідної С02 (10) сигналу першої коцієнт посилення Kt2. Визначають рівень сигналу ректуючої ланки Р01 і інтегральної складової Е02 D0K (26), якщо він менше або рівно нулю, Т0 сиг(10) від похідної С02. Формують коефіцієнт посиналу D0K (27) привласнюють рівень нуля. лення Кt02 (11) від другого часу Td02, що складаДалі на Фіг.6 представлений алгоритм третьоється з: добутку коефіцієнта захисту Тk02 помного коректуючого ланцюга, розміщеного послідовно женого на дужку, в якій від приватного від з другим коректуючим ланцюгом з введенням в розподілу другого часу Td02 на час опиту сигналу нього замість коефіцієнта посилення - сигналу датчика Т0, віднімають коефіцієнт К3, до нього обчислюваного інтеграла, що складається з: Start додається коефіцієнт К4 помножений на приватне 3 - End 3, визначення першої похідної DE0 (28) від розподілу часу опиту сигналу датчика Т0 на сигналу друго го коректуючого ланцюга D0K і інтегдругий час Td02. Обчислюють ви хідний сигнал рала F (28) від похідної DE0. Визначають третю першого коректуючого ланцюга D00 (12), рівній коректуючу ланцюг Р (28), рівний сумі: сигналу сумі: сигналу першої коректуючої ланки Р01 і його другого коректуючого ланцюга D0K і його похідної похідної С02 помноженої на коефіцієнт посилення DE0, помноженої на рівень інтеграла Q. ВизначаКt02. ють знак похідної DE0 (29), якщо він більше або Далі визначають захисні коефіцієнти Тk1 і Тk2 рівно нулю: визначають похідну DM (30), третього другого коректуючого ланцюга. коректуючого ланцюга Р, рівну різниці сигналу Р і Алгоритм формування захисних коефіцієнтів його попереднього значення PZ; обчислюють друдругого коректуючого ланцюга, залежно від рівня гу похідн у DK (30), сигналу другого коректуючого 15 37415 16 ланцюга D0K, рівну різниці похідної DE0 і його посвоє показання на одиницю. Визначають рівень переднього значення DEZ. Якщо сигнал похідної лічильника ch1 (55), якщо вміст лічильника сh1 DE0 (29) менше нуля: визначають похідну DM (31), більше або рівно коефіцієнту К8, то обчислюють рівну різниці попереднього значення похідної PZ і різницю DB (56) між рівнем поточного обчислювасигналу Р; визначають другу похідну DK (31), сигного часу Т і рівнем попереднього його значення налу другого коректуючого ланцюга D0K, рівну BN. Привласнюють сигналу BN (56) поточне знарізниці попереднього значення похідної DEZ і почення рівня часу Т і лічильнику ch1 (56) присвоюхідної DE0. Проводять присвоювання: сигналу PZ ють рівень нуля. Визначають рівень сигналу DB (32) значення сигналу третього коректуючого лан(57) і якщо абсолютне значення сигналу DB менше цюга Р; сигналу DEZ (32) значення похідної DE0. або рівно точності обчислення Ch, то проводять Визначають знак другий похідної DK (33) якщо він запис результату обчислення часу Т і визначають менше або рівно нулю, коефіцієнту Y (34) присвозначення коефіцієнтів а1 і а2 (58), і якщо коефіцієюють рівень одиниці - дозвіл змінювати підінтегранти а1 і а2 рівні нулю, то запис часу Td1 не провольного значення Q, інакше коефіцієнту Y (35), придять. Визначають значення коефіцієнта а1 (62) і своюють рівень нуля - заборона змінювати якщо коефіцієнт а1 рівний нулю, то проводять запідінтегрального значення Q. пис першого часу Td1 (63), а коефіцієнтам а1 і Тk1, Далі обчислюють коефіцієнт посилення KU піприсвоюють рівень одиниці; часу першій коректудінтегрального виразу А1, інтеграла Q і часу Т. ючій аперіодичній ланці Td1 привласнюють перАлгоритм обчислення представлений на Фіг.7 ший обчислений час Т; часу Ті1, що фіксує загальтаким чином: коефіцієнт посилення KU формують ний час від початку вимірювання до запису з: Start 4 - End 4, присвоєння сигналу С (36), обпершого зміряного часу Td1, присвоюють значення межуючому максимальний коефіцієнт посилення сумарного поточного часу Si; команді збудження KU, рівня сигналу D0K. Визначають знак похідної К0 присвоюють коефіцієнт збудження датчика К1 DE0 (37), якщо він менше нуля, то обчислюють сигнал низького рівня, якщо до цього був введений проміжний коефіцієнт k (38), рівний сумі сигналів сигнал більш високого рівня К2; початковому рівню збудження датчика К0 і коефіцієнта К5. Визначаінтеграла Q присвоюють коефіцієнт К9; Точність ють рівень сигналу С (39), якщо він менше або обчислення Ch - коефіцієнт К24; лічильнику ступерівний коефіцієнту k, то сигналу С (40) присвоюня n - нуль; часу опиту да тчика параметра Т0 ють рівень сигналу k. Обчислюють коефіцієнт покоефіцієнт К10; мінімальній зоні нечутливості Tz1 силення KU (41), рівний одиниці діленої на різницю коефіцієнт К11; максимальній зоні нечутливості сигналів С і збудження датчика К0. Якщо сигнал Tz2 - коефіцієнт К12. Обчислюють різницю DTd1 похідної DE0 (37) більше або рівно нулю, то обчи(63), що показує можливість перезапису в першу слюють проміжний коефіцієнт k (42), рівний різниці коректуючу ланку першого коректуючого ланцюга сигналів збудження датчика К0 і коефіцієнта К5. D00 нового значення Td1, і якщо різниця DTd1 (64) Визначають рівень сигналу С (43), якщо він більше по абсолютному значенню між знов обчисленим або рівно коефіцієнту k, то сигналу С (44) присвочасом Td1 і попереднім записаним часом Td01 юють рівень сигналу k. Обчислюють коефіцієнт більше або рівно параметра d, то часу Td01 (65) посилення KU (45), рівний одиниці діленої на різприсвоюють знов обчислений час Т і лічильнику ницю сигналів збудження датчика К0 і С. Обчисch3 (66) присвоюють рівень нуль. Після наступного люють сигнал підінтегрального виразу А1 (46), обчислення часу Т знов визначають значення корівний добутку похідної DM на коефіцієнт посиефіцієнтів а1 і а2 (58) і якщо коефіцієнт а1 рівний лення KU і на квадрат інтеграла Q. Обчислюють одиниці і при цьому коефіцієнт а2 рівний нулю, то сигнал А2 (46), призначений для обмеження рівня знов обчислений час Т присвоюють часу Td2 (59) сигналу А1, рівного рівню інтеграла Q помноженодля чого коефіцієнтам а2 і Тk2 присвоюють рівень го на коефіцієнт К6. Визначають рівень сигналу А1 одиниці; а часу др угої коректуючої ланки Td2 (47), якщо він більше або поранено сигналу А2, то присвоюють другий обчислений час Т; часу Тi2 сигналу А1 (48) присвоюють рівень сигналу А2; присвоюють фіксуюче загальний час від початку якщо сигнал А1 (49) менше негативного сигналу вимірювання до запису другого зміряного часу Td2 А2, то сигналу А1 (50) присвоюють негативний - час Si. Обчислюють різницю DTd2 (59), що покарівень сигналу А2. Обчислюють інтеграл Q (51), зує можливість перезапису в другу ланку першого рівний сумі рівня інтеграла Q і добутку сигналу А1, коректуючого ланцюга D00 нового значення Td2, помноженого на коефіцієнти Y і W, останній ввеяка дорівнює різниці між знов записаним часом дений в підінтегральний вираз Q для стійкості обTd2 і попередньо записаним часом Td02. Визначислення. Обчислюють постійну часу ланки Т (51), чають рівень сигналу різниці DTd2 (60), якщо абщо складається з добутку часу опиту си гналу датсолютне значення сигналу різниці DTd2 більше чика параметра Т0 на дужку, в якій від суми рівня або рівна параметру d, то часу Td02 (61) присвоінтеграла Q і коефіцієнта К3 віднімають коефіцієнт юють знов обчислений час Т і лічильнику сh3 (66) К7, ділений на суму рівня інтеграла Q і коефіцієнта присвоюють рівень нуль. К3. Алгоритму обчислення числового значення ліПотім проводять послідовний оперативний зачильника часу опиту датчика параметра і мінімапис при обчисленні постійних часів датчика паральної і максимальної меж зон нечутливості предметра, алгоритм якого представлений на Фіг.8 таставлено на Фіг.9 таким чином: Start 6 - End 6, ким чином: Start 5 - End 5, визначник рівня сигналу визначник рівня сигналу W (67), якщо сигнал W Y (52): якщо він рівний нулю, то вміст лічильника порівняний нулю, то лічильник ch2 (68) збільшує ch1 (53) присвоюють рівень нуля; якщо сигнал Y своє показання на одиницю. Визначають рівень рівний одиниці, то лічильник ch1 (54) збільшують лічильника ch2 (69): якщо вміст лічильника ch2 17 37415 18 більше або рівно коефіцієнту К13, то визначають цієнта W (103), якщо він рівний одиниці, то коефірівень обчислюваного часу Т (70), якщо рівень Т цієнту W (104), присвоюють нуль, якщо він рівний менше мінімальної межі зони нечутливості Tz1 і нулю, то коефіцієнту W (105) присвоюють одинипри цьому похідна DM менше нуля, то з лічильницю. Визначають момент запису обчислених поточка n (71), з числового значення ступеня числа К, них параметрів, якщо коефіцієнт W (106) рівний віднімають одиницю. Визначають рівень лічильнинулю і при цьому сигнал Si більше нуля, то вивока n (72), якщо число в лічильнику n менше або дять наступні сигнали на друк або реєстрацію рівно нулю, то лічильнику n (73) присвоюють рі(107): Si - сумарний поточний час обчислень, D0 вень нуля. Обчислюють час опиту сигналу датчивхідний сигнал датчика параметра, К0 - вихідний ками параметра Т0 (74), рівного значенню числа К збудливий сигнал поступаючий на датчик парамев ступені n, помноженому на коефіцієнт К10. Обтра, D0K - вихідний скоректований сигнал датчика числюють мінімальну межу зони нечутливості Tz1 параметра, Т - поточний обчислюваний час ланки (74), рівну добутку часу опиту сигналу датчика датчика параметра, Т0 - час опиту датчика парапараметра Т0, помноженого на коефіцієнт К14. метра і коефіцієнт Y дозволяючий або забороняюВизначають рівень обчислюваного часу Т (75), чий проводити обчислення постійної часу Т ланки якщо рівень часу Т більше максимальної межі зони датчика параметра. Визначають умову продовнечутливості Tz2 і при цьому похідна DM більше ження циклу ТІ (108), якщо воно рівне поточному нуля, то лічильник числа n (76) додає одиницю. значенню управляючої змінною і, то одноразово Визначають рівень лічильника n (77), якщо число в записують параметри (109): Ті1 - час до запису лічильнику n більше або рівно коефіцієнту К15, то першого обчисленого часу Td1 і сам час Td1; Ti2 лічильнику n (78) присвоюють рівень коефіцієнта час до запису друго го обчисленого часу Td2 і сам К15. Обчислюють час опиту сигналу датчика пачас Td2, або свідчення температури, наприклад раметра Т0 (79), рівного значенню числа К в стумедичного термометра - сигнал D00. пені n, помноженому на коефіцієнт К10. ОбчислюДля регламентної перевірки обчислювача поють максимальну межу зони нечутливості Tz2 (79), стійної часу Т ланки датчика параметра формують рівну добутку часу опиту сигналу да тчика парамееквівалент датчика параметра, алгоритм якого тра Т0, помноженого на коефіцієнт К16. Присвоюпредставлений на Фіг.13 таким чином: Start 10 ють лічильнику ch2 (80) рівень нуля. End 10, обчислюють перший час t1 (110) по задаДалі визначають межу допустимої точності обному часу першої ланки Т1, яка представлена сучислення Сh часу ланки датчика параметра Т замою: частка від ділення часу Т1 на час опиту сиглежно від числового значення лічильника ступеня налу датчика параметра Т0, коефіцієнтів К3 і К4, n, алгоритм якого представлений на Фіг.10 таким останній множать на частку від ділення часу опиту чином: Start 7 - End 7, визначник рівня числа n 81, сигналу датчика параметра Т0 на заданий час Т1, 83, 85, 87, 89, 91, 93, якщо число п менше або рівякий не повинен бути рівним нулю. Вихідний сигнал першої аперіодичної ланки D1 (111) рівний но числовому значенню коефіцієнта К17¸К23, то у сумі сигналу D1 і різниці сигналу збудження К0 і кожному конкретному випадку допустимої точності сигналу першої ланки D1, діленої на час t1. ОбчиСh 82, 84, 86, 88, 90, 92, 94, привласнюють числові слюють другий час t2 (112) по заданому часу друзначення коефіцієнтів точності К24¸К30 відповідгої ланки Т2, яка представлена сумою: часткою від но. Визначають рівень обчислюваного часу Т (95) і ділення часу Т2 на час опиту сигналу датчика паякщо рівень обчислюваного часу Т більше або раметра Т0, коефіцієнтів К3 і К4, останній множать рівно числовому значенню коефіцієнта К31, то на частку від ділення часу опиту сигналу датчика допустимій точності Ch (96) присвоюють значення параметра Т0 на заданий час Т2, який не повинен коефіцієнта К32. бути рівним нулю. Ви хідний сигнал другої аперіоПотім визначають кінець циклу обчислення дичної ланки D2 (113) рівний сумі: сигналу D2 і постійної часу датчика параметра Т, алгоритм якорізниці сигналу першої ланки D1 і сигналу другої го представлений на Фіг.11 таким чином: Start 8 ланки D2, діленої на час t2. Вихідний сигнал еквіEnd 8, формують визначника рівня коефіцієнта Y валента датчика параметра D0 (113) рівний сумі (97), якщо він рівний одиниці, то визначають рівні добутків: сигналу першої ланки D1, помноженої на коефіцієнтів а1 або а2 (98), якщо коефіцієнт а1 або коефіцієнт d1, - ви хід аперіодичної ланки першого а2 рівний одиниці, то лічильник сh3 (99) додає порядку, і сигналу другої ланки D2, помноженої на одиницю. Визначають показання лічильника ch3 коефіцієнт d2 - вихід аперіодичної ланки другого (100), якщо свідчення лічильника ch3 буде більше порядку. Завдання коефіцієнтам d1 - одиниці, a d2 або рівно коефіцієнту К33 і при цьому абсолютне - нуля або d2 - одиниці, a d1 - нуля визначає вихізначення першої похідної DE0 (101) від сигналу дний сигнал еквівалента датчика параметра D0. другого коректуючого ланцюга D0K менше або Чисельні значення коефіцієнтів, що викорисрівно точності обчислення К24, то умові продовтовуються в обчислювальних алгоритмах, визнаженню циклу ТІ (102) присвоюють поТ0чне значені емпіричним шляхом, і представлені в таблиці 1. чення управляючої перемінної і, що приводить до Результати обчислення постійних часу датчиприпинення циклу обчислення. ка параметра представлені в таблицях 2, 3, 4, в При необхідності додатково визначають мояких записані в динаміці наступні поточні параметмент запису поточних параметрів обчислювача ри: Si, D0, К0, D0K, T, Т0 і Y при обчисленні попри обчисленні часу датчика параметра Т, алгостійної часу ланки датчика параметра Т ритм якого представлений на Фіг.12 таким чином: Start 9 - End 9, формують визначника рівня коефі 19 37415 20 Таблиця 1 Коеф. d К К3 К4 К5 К6 К7 К8 К9 К10 К11 Розмір 0,001 2 0,5 0,083333194445 0,01 0,4 0,0833338887 24 2500 0,000001 0,00025 Коеф. К12 К13 К14 К15 К16 К17 К18 К19 К20 К21 К22 Розмір 0,00075 2 250 20 750 2 5 8 11 14 17 Коеф. К23 К24 К25 К26 К27 К28 К29 К30 К31 К32 К3З Розмір 20 1е-008 1е-007 1е-006 1е-005 1е-004 1е-003 1е-002 10000 1е-001 12 Таблиця 2 Т1=180 К1=0.25 К2=0.366 Si 1е-006 0.000010 0.000016 0.000052 0.000076 0.000220 0.000316 0.000892 0.001276 0.003580 0.020476 0.057340 0.081916 0.229372 0.720892 0.917500 1.179644 1.441788 2.097148 2.621436 3.145724 5.242876 14.680060 14.680062 14.680065 D0 К0 0.2500000006 0.366 0.2500000064 0.366 0.2500000103 0.366 0.2500000335 0.366 0.2500000490 0.366 0.2500001418 0.366 0.2500002036 0.366 0.2500005748 0.366 0.2500008223 0.366 0.2500023071 0.366 0.2500131949 0.366 0.2500369466 0.366 0.2500527783 0.366 0.2501477234 0.366 0.2504636458 0.366 0.2505897734 0.366 0.2507577294 0.366 0.2509254410 0.366 0.2513436528 0.366 0.2516771278 0.366 0.2520096328 0.366 0.2533300101 0.366 0.2590849812 0.250 0.2590849811 0.366 0.2590849829 0.366 Ti1=14.680060с D0K T 0.2500000006 0.0025005000 0.2500000064 0.0050012083 0.2500000103 0.0100024165 0.2500000335 0.0200081666 0.2500000490 0.0400163332 0.2500001418 0.0800860178 0.2500002036 0.1601720356 0.2500005748 0.3211986434 0.2500008223 0.6423972869 0.2500023071 1.2985277450 0.2500131949 10.8350939131 0.2500369466 25.4367236692 0.2500527783 50.8734473383 0.2501477234 149.0040831907 0.2504636458 179.9999971732 0.2505897734 359.9999943463 0.2507577294 216.0262067666 0.2509254410 164.1295772429 0.2513436528 354.6477694868 0.2516771278 212.8410732747 0.2520096328 166.9127245845 0.2533300101 179.9999999905 0.2590849812 180.0000000125 0.2499999983 0.0015004999 0.3659999991 0.0018009998 Td1=180.0000000125с. Т0 0.000001 0.000002 0.000004 0.000008 0.000016 0.000032 0.000064 0.000128 0.000256 0.000512 0.004096 0.008192 0.016384 0.032768 0.065536 0.131072 0.131072 0.131072 0.262144 0.262144 0.262144 0.262144 0.000001 0.000001 0.000002 Y 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1 0 1 1 0 1 1 1 1 1 1 Таблиця 3 ТІ=36000 К1=0.25 К2=0.366 Si 1е-006 0.000010 0.000016 0.000052 0.000076 0.000220 0.000316 0.000892 0.001276 D0 0.2500000000 0.2500000000 0.2500000001 0.2500000002 0.2500000002 0.2500000007 0.2500000010 0.2500000029 0.2500000041 К0 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 D0K 0.2500000000 0.2500000000 0.2500000001 0.2500000002 0.2500000002 0.2500000007 0.2500000010 0.2500000029 0.2500000041 Т 0.0025005000 0.0050010010 0.0100020020 0.0200040206 0.0400080411 0.0800163489 0.1600326979 0.3200696625 0.6401393249 Т0 0.000001 0.000002 0.000004 0.000008 0.000016 0.000032 0.000064 0.000128 0.000256 Y 0 1 0 1 0 1 0 1 0 21 37415 22 Продовження таблиці 3 0.003580 0.005116 0.014332 0.020476 0.057340 0.081916 0.229372 0.327676 0.917500 1.310716 3.670012 9.437180 13.631484 17.825788 19.922940 22.020092 24.117244 26.214396 28.311548 30.408700 32.505852 34.603004 36.700156 38.797308 40.894460 42.991612 45.088764 63.963132 80.740348 80.740350 0.2500000115 0.366 0.2500000165 0.366 0.2500000462 0.366 0.2500000660 0.366 0.2500001848 0.366 0.2500002640 0.366 0.2500007391 0.366 0.2500010558 0.366 0.2500029564 0.366 0.2500042233 0.366 0.2500118250 0.366 0.2500304047 0.366 0.2500439154 0.366 0.2500574244 0.366 0.2500641784 0.366 0.2500709319 0.366 0.2500776851 0.366 0.2500844379 0.366 0.2500911902 0.366 0.2500979422 0.366 0.2501046938 0.366 0.2501114450 0.366 0.2501181958 0.366 0.2501249462 0.366 0.2501316962 0.366 0.2501384458 0.366 0.2501451951 0.366 0.2502059204 0.366 0.2502598718 0.250 0.2502598718 0.366 Ті1=80.740348с. 0.2500000115 1.2803469167 0.2500000165 2.5606938335 0.2500000462 5.1224800699 0.2500000660 10.2449601398 0.2500001848 20.5074048409 0.2500002640 41.0148096819 0.2500007391 82.3097687636 0.2500010558 164.6195375273 0.2500029564 333.7465618907 0.2500042233 667.4931237814 0.2500118250 1408.6370899660 0.2500304047 3252.5039491138 0.2500439154 3830.1282122774 0.2500574244 4625.7997853397 0.2500641784 5143.7112618117 0.2500709319 5773.5305625518 0.2500776851 6550.8492716837 0.2500844379 7525.8527133797 0.2500911902 8770.1072994502 0.2500979422 10385.9958263159 0.2501046938 12517.7521433138 0.2501114450 15356.7404272717 0.2501181958 19112.9885939824 0.2501249462 23872.8458916416 0.2501316962 29205.6542188768 0.2501384458 33677.3645799281 0.2501451951 35709.9774583680 0.2502059204 36000.0167588409 0.2502598718 36000.0050790888 0.2500000796 0.0015004999 Td1=36000.0050790888с. 0.000512 0.001024 0.002048 0.004096 0.008192 0.016384 0.032768 0.065536 0.131072 0.262144 0.524288 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 0.000001 0.000001 1 0 1 0 1 0 1 0 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 Таблиця 4 Т1=480 T2=30 K1=0.25 K2=0.366 Si 1e-006 0.458748 0.917500 1.310716 2.621436 5.242876 89.128956 91.226108 93.323260 95.420412 99.614716 103.809020 105.906172 108.003324 110.100476 112.197628 114.294780 116.391932 118.489084 120.586236 122.683388 128.974844 D0 0.2500000000 0.2500009176 0.2500036503 0.2500074488 0.2500293384 0.2501138169 0.2637355438 0.2641568108 0.2645778994 0.2649986984 0.2658390228 0.2666770457 0.2670949925 0.2675121337 0.2679284042 0.2683437439 0.2687580970 0.2691714123 0.2695836424 0.2699947436 0.2704046758 0.2716271029 К0 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 0.366 D0K 0.2500000000 0.2500009176 0.2500036503 0.2500074488 0.2500293384 0.2501138169 0.2637355438 0.2641568108 0.2645778994 0.2649986984 0.2658390228 0.2666770457 0.2670949925 0.2675121337 0.2679284042 0.2683437439 0.2687580970 0.2691714123 0.2695836424 0.2699947436 0.2704046758 0.2716271029 T 0.0025005000 163.8727658159 327.7455316318 655.4910632636 1310.9821265271 2621.9642530542 2621.9642530542 3670.5402630373 4230.1441478379 2538.2961808013 1877.7829160222 1391.7933294264 835.2856426610 1115.1117286268 733.5427565182 942.6940331712 764.3256627058 839.5090207562 730.9087418723 758.5718275709 701.7185801288 659.1195783419 T0 0.000001 0.065536 0.131072 0.262144 0.524288 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 Y 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 23 37415 24 Продовження таблиці 4 137.363452 149.946364 152.043516 166.723580 189.792252 193.986556 208.666620 210.763772 441.450492 441.450505 441.630827 441.745515 441.974891 442.105963 442.237035 445.120619 445.251691 0.2732387146 0.366 0.2756141305 0.366 0.2760049367 0.366 0.2786985950 0.366 0.2827807197 0.366 0.2835030807 0.366 0.2859837211 0.366 0.2863320981 0.366 0.3167280959 0.250 0.3167280972 0.250 0.3167461669 0.250 0.3167575164 0.250 0.3167798888 0.250 0.3167924750 0.250 0.3168049234 0.250 0.3170451607 0.250 0.3170546066 0.250 Ті1=441.450492с. Td1=480.0074563413c 0.2732387146 605.9700126654 0.2756141305 558.3494646588 0.2760049367 552.6315932615 0.2786985950 523.5005353261 0.2827807197 500.2193255065 0.2835030807 497.6447176994 0.2859837211 491.0047918068 0.2863320981 490.2918293918 0.3167280959 480.0074563413 0.3651975058 0.0030010908 0.3645194643 29.9995127860 0.3640946726 36.0059673529 0.3632495093 59.1066755136 0.3627557893 35.4771060527 0.3622642216 27.8148300434 0.3519757234 29.9999668771 0.2499990371 29.9999668771 Ti2=445.186155с. Td2=29.9999668771с. При цьому в таблиці 2 представлено обчислення постійної часу Т однієї аперіодичної ланки датчика параметра з наступними початковими вхідними параметрами: заданий час однієї аперіодичної ланки Т1 рівний 180сек. (3 хвилини); початкова температура 25°С представлена коефіцієнтом К1, рівним 0,25; потім подана стрибком на вхід датчика параметра температура 36,6°С представлена коефіцієнтом К2, рівним 0,366. Остаточні вихідні параметри обчислювача: сумарний час обчислення при першому включенні Ті1 складає 14.680060сек. і обчислений час Td1 складає 180.0000000125сек. Після обчислень часів Ті1 і Td1 проводять зміну вхідної температури з 36,6°С на 25°С, а потім на 36,6°С із зміною часу опиту датчика параметра Т0. Як видно з таблиці, вихідний параметр температури швидко слідує за зміною вхідної температури за час 1 - 2 мікросекунди. В результаті вхідна аперіодична ланка із заданим часом Т1 рівним 180сек. (3 хвилини) скорочено і, таким чином, підвищено швидкодію і точність передвіщення датчика параметра. У таблиці 3 - представлені обчислення постійної часу Т однієї аперіодичної ланки датчика параметра з наступними початковими вхідними параметрами: заданий час однієї аперіодичної ланки першого порядку Т1 рівний 36000сек. (10 годин); початкові вхідні параметри: початкова температура 25°С представлена коефіцієнтом К1 рівним 0,25; потім подана стрибком на вхід датчика параметра температура 36,6°С представлена коефіцієнтом К2, рівним 0,366. Остаточні вихідні параметри обчислювача: сумарний час обчислення при першому включенні Ті1 складає 80.740348сек. і обчислений час Td1 складає 36000.0050790888сек. Після обчислень часів Ті1 і Td1 проведена різка зміна вхідної температури з 36,6°С на 25°С, а потім на 36,6°С із зміною часу опиту датчика параметра Т0. При зміні вхідного сигналу ви хідний параметр швидко слідує за вхідним сигналом за час 1 - 2 мікросекунди. Це також підтверджує, що вхідна аперіодична ланка першо 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 1.048576 0.000001 0.000002 0.016384 0.032768 0.065536 0.065536 0.065536 0.065536 0.065536 1 1 1 1 1 1 1 1 1 0 1 1 0 1 1 1 0 го порядку із заданим часом Т1 рівним 36000сек. (10 годин) скорочено і, таким чином, підвищено швидкодію і точність передвіщення датчика параметра. У таблиці 4 представлені обчислення постійних часів Т аперіодичної ланки другого порядку з наступними початковими вхідними параметрами: задані часи ланок Т1 рівні 480сек. (8 хвилин) і Т2 рівно 30 секунд, початкова температура 25°С представлена коефіцієнтом К1, рівним 0,25; потім подана стрибком на вхід датчика параметра температура 36,6°С, аперіодичної ланки другого порядку представлена коефіцієнтом К2, рівним 0,366. Остаточні вихідні параметри обчислювача: сумарний час обчислення першого часу Ті1 при першому включенні складає 441.450492сек. і обчислене перший час Td1 складає 480.0074563413сек. і сумарний час обчислення другого часу при першому включенні Ті2 складає 445.186155сек. і час Td2 складає 29.9999668771сек. Після обчислень часів: Ті1 і Td1, Ti2 і Td2 проводять різку зміну вхідної температури з 36,6°С на 25°С, вихідний параметр температури швидко слідує за свідченнями вхідної температури 25°С за 0.0655сек. Як видно з таблиці, вхідна аперіодична ланка другого порядку із заданими часом Т1 рівне 480сек. (8 хвилин) і Т2 рівне 30сек. скорочено, тобто підвищена швидкодія і точність передвіщення датчика параметра. Таким чином, запропонований процес для передвіщення відповіді датчика параметра дозволяє проводити обчислення постійної часу аперіодичних ланок першого і другого порядку, що входять в передавальну функцію датчика параметра і передвіщення його відповіді, внаслідок чого досягається підвищення швидкодії і збільшення точності вимірювання параметрів, що дозволяє своєчасно проводити контроль і регулювання параметрів в різних те хнологічних об'єктах при їх експлуатації. Джерела інформації: 1. Міжнародна заявка WO/2000/070316, публ. 23.11.2000, МПК- G01K7/42. 25 37415 26 27 37415 28 29 37415 30 31 37415 32 33 Комп’ютерна в ерстка Г. Паяльніков 37415 Підписне 34 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюProcess for prediction of response of parameter indicator
Автори англійськоюButsenko Volodymyr Mykolaiovych
Назва патенту російськоюПроцесс для предсказания ответа датчика параметра
Автори російськоюБуценко Владимир Николаевич
МПК / Мітки
МПК: G01K 7/42
Мітки: датчика, процес, передвіщення, відповіді, параметра
Код посилання
<a href="https://ua.patents.su/17-37415-proces-dlya-peredvishhennya-vidpovidi-datchika-parametra.html" target="_blank" rel="follow" title="База патентів України">Процес для передвіщення відповіді датчика параметра</a>
Процес оцінювання типу імунної відповіді
Номер патенту: 11004
Опубліковано: 15.12.2005
Автори: Дроздова Лариса Анатоліївна, Клімова Олена Михайлівна
МПК: A61B 10/00
Мітки: відповіді, процес, імунної, оцінювання, типу
Формула / Реферат:
Процес оцінювання типу імунної відповіді, що включає якісну та кількісну характеристику показників клітинного імунітету по експресії диференціюючих рецепторів Т-лімфоцитів і оцінювання показників гуморального імунітету шляхом виявлення імуноглобулінових антитіл, який відрізняється тим, що додатково проводять оцінювання показників неспецифічної резистентності організму шляхом оцінювання фагоцитуючої активності гранулоцитарних нейтрофілів і...
Операційний підсилювач сигналу датчика, наприклад наявності вагона на колії
Номер патенту: 12099
Опубліковано: 16.01.2006
Автор: Снітовський Володимир Михайлович
МПК: H03K 3/023
Мітки: датчика, наприклад, підсилювач, операційний, наявності, сигналу, вагона, колії
Формула / Реферат:
Операційний підсилювач сигналу датчика, наприклад наявності вагона на колії, що містить датчик, наприклад наявності вагона на колії, вхідний фільтр і власне операційний підсилювач, який відрізняється тим, що до виходу власне операційного підсилювача підключений своїм входом вихідний фільтр, вихід якого з'єднаний із входом вузла видачі дискретного сигналу.
Пристрій для підсилювання сигналів датчика наявності вагона на колії
Номер патенту: 18574
Опубліковано: 15.11.2006
Автор: Снітовський Володимир Михайлович
МПК: H03K 3/023
Мітки: вагона, підсилювання, сигналів, датчика, пристрій, колії, наявності
Формула / Реферат:
1. Пристрій для підсилювання сигналів датчика наявності вагона на колії, що включає принаймні один канал 1К датчика Д і принаймні один операційний підсилювач ОП1 сигналу датчика, який відрізняється тим, що датчик наявності вагона на колії має другий аналогічний канал 2К, до якого своїм першим входом підключений другий аналогічний операційний підсилювач ОП2 сигналу датчика, а останній своїм виходом підключений через вузол заборони В3 до...
Спосіб визначення температурної залежності параметра порядку фазового переходу у твердих тілах
Номер патенту: 13684
Опубліковано: 17.04.2006
Автор: Студеняк Ігор Петрович
МПК: G01N 25/02, G01N 3/40
Мітки: порядку, температурної, фазового, тілах, визначення, твердих, переходу, параметра, спосіб, залежності
Формула / Реферат:
Спосіб визначення температурної залежності параметра порядку фазового переходу у твердих тілах, який включає визначення параметра порядку шляхом температурних ізоабсорбційних досліджень краю оптичного поглинання, який відрізняється тим, що із експериментально отриманої температурної залежності ширини оптичної псевдощілини
Спосіб визначення критичного індексу параметра порядку фазового переходу у твердих тілах
Номер патенту: 15135
Опубліковано: 15.06.2006
Автор: Студеняк Ігор Петрович
МПК: G01K 7/00
Мітки: спосіб, визначення, тілах, параметра, фазового, критичного, переходу, індексу, твердих, порядку
Формула / Реферат:
Спосіб визначення критичного індексу параметра порядку фазового переходу у твердих тілах, який включає температурні ізоабсорбційні дослідження краю оптичного поглинання твердих тіл, який відрізняється тим, що із експериментально отриманої температурної залежності ширини псевдозабороненої зони спочатку розраховують приріст
Попередній патент: Спосіб одержання рідкого органічного добрива “вермибіомаг”
Наступний патент: Пристрій для контролю та реєстрації параметрів роботи трамвая
Випадковий патент: Спосіб вирощування стиглих соснових деревостанів при відтворенні середньої крупності деревини в господарстві помірного приросту