Спосіб супроводження цілі та пристрій для його реалізації
Номер патенту: 81384
Опубліковано: 25.12.2007
Автори: Нікітченко Віталій Григорович, Григор'єва Людмила Володимирівна, Клепфер Євгеній Іванович, Мартинів Мирон Стефанович, Чайковський Роман Іванович, Лобур Михайло Васильович, Антонюк Володимир Павлович, Лозовий Орест Михайлович, Максімов Сєргєй Владіміровіч

Формула / Реферат
1. Спосіб супроводження цілі, що включає неперервне радіолокаційне вимірювання відносного розташування цілі по відстані, кутових координатах і доплерівському зміщенню частоти відбитого від цілі зондувального сигналу, напрямок надходження якого розрізняють шляхом слідкуючого пеленгування за рахунок сформованих двох вузьких діаграм спрямованості антени, що перетинаються між собою і сканують в просторі в точці перетину діаграм спрямованості антени і оптичної лінії візування антени на ціль навколо цієї лінії візування, який відрізняється тим, що додатково проводять пасивну пеленгацію цілі радіометричним каналом, а також порівняння кутового шуму в активному радіолокаційному каналі пеленгації з шумовими похибками в пасивному радіометричному каналі пеленгації і, при перевищенні кутового шуму в активному радіолокаційному каналі пеленгації над шумовими похибками в пасивному радіометричному каналі пеленгації, проводять автоматичне переключення контуру супроводу з активного радіолокаційного каналу на пасивний радіометричний канал.
2. Спосіб супроводження цілі за п. 1, який відрізняється тим, що при наближенні цілі до системи, що її супроводжує, на відстань, при якій кутові розміри цілі стають співвимірні з шириною розкриття пеленгаційних характеристик, після перевищення кутового шуму в каналах пеленгації наперед заданого порогу, додатково проводять розширення пеленгаційних характеристик системи супроводження цілі шляхом розширення діаграм спрямованості антени, зміщення рівносигнального напрямку на ширину парціальної діаграми спрямованості антени і повертання парціальних діаграм спрямованості антени одночасно навколо цієї лінії візування антени на ціль.
3. Спосіб супроводження цілі за п. 1, який відрізняється тим, що при скануванні діаграм спрямованості антен додатково проводять розв'язування рухомих осей приводу антени від впливу коливань корпусу об'єкта системи, що супроводжує ціль, шляхом розкручування динамічно збалансованих рефлектора і контррефлектора антени навколо оптичної осі візування антени, та формування опорних сигналів для забезпечення виділення сигналів похибок по осях Y і Z та виділення сигналів похибок по осях Y і Z в мережі замкнутого контуру супроводження цілі.
4. Спосіб супроводження цілі за п. 1, який відрізняється тим, що при повороті осі приводу антени на кут механічного обмеження на керуючий вхід приводу додатково подають інвертований і підсилений сигнал похибки супроводження, а оцінку кутового відхилення цілі за межі механічного обмеження кута повертання антени проводять шляхом накопичення з кінцевим запам'ятовуванням сигналу похибки контуру супроводження за межею механічного обмеження.
5. Спосіб супроводження цілі за п. 1, який відрізняється тим, що додатково проводять оцінку кутової швидкості лінії візування шляхом Калмановської фільтрації на основі кінематичного рівняння руху об'єкта за даними цілевказування і супроводження цілі та врахування початкового вектора стану при запуску об'єкта з системою супроводження цілі, вектора стану об'єкта в процесі супроводження цілі і екстраполяції координат цілі при втраті сигналу.
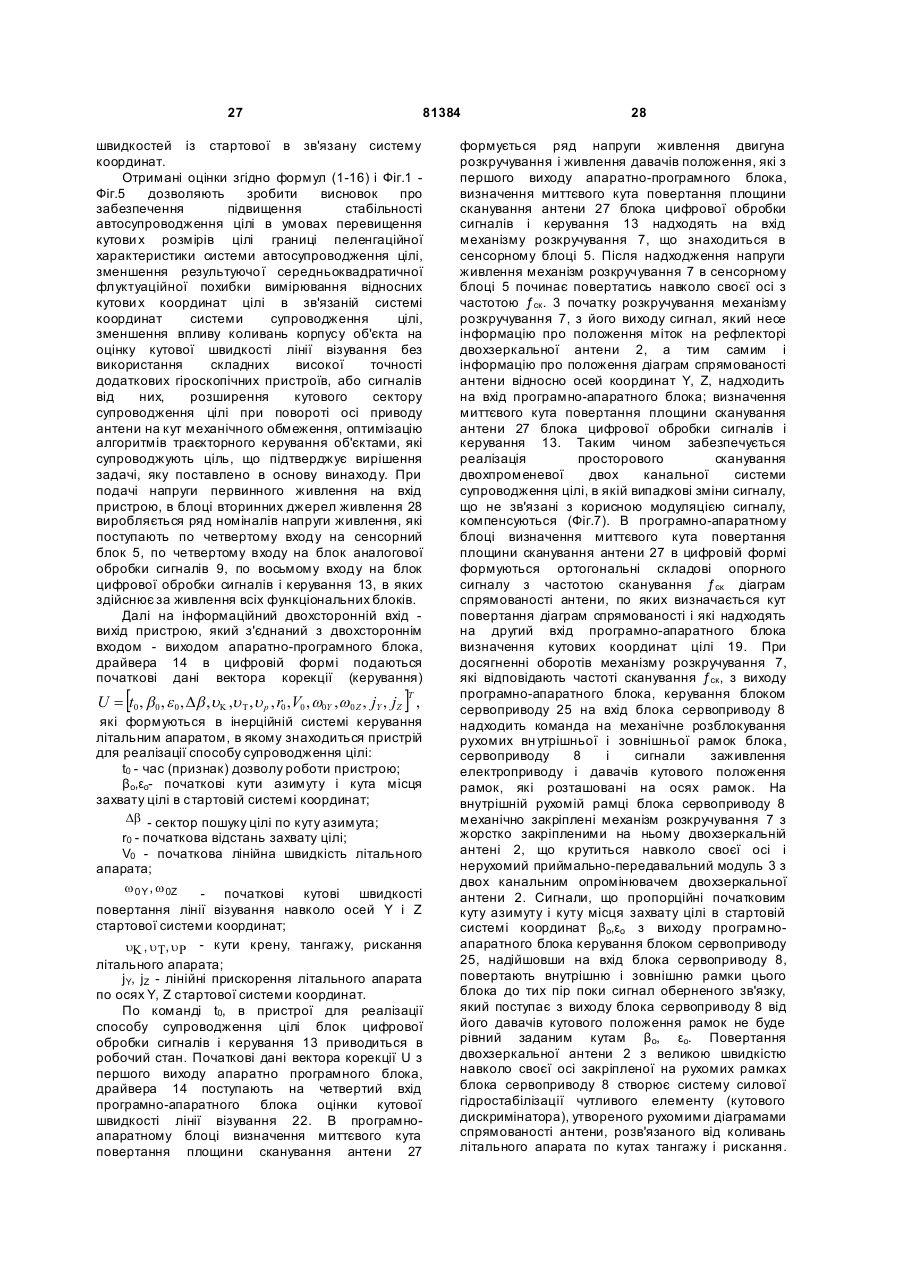
6. Пристрій супроводження цілі, що містить захисний радіопрозорий обтічник, дводзеркальну антену, двоканальний приймально-передавальний модуль і опорний генератор, який відрізняється тим, що додатково введені сенсорний блок, який містить механізм зміни типу контррефлектора, механізм розкручування, блок сервоприводу, причому механізм розкручування своєю рухомою віссю механічно з'єднаний з дводзеркальною антеною і двоканальним приймально-передавальним модулем, вхід механізму розкручування є першим входом сенсорного блока, вихід механізму розкручування є першим виходом сенсорного блока, виконавчий елемент механізму зміни типу контррефлектора механічно зв'язаний з контррефлектором дводзеркальної антени, вхід механізму зміни типу контррефлектора є другим входом сенсорного блока, механізм розкручування і двоканальний приймально-передавальний модуль механічно закріплені на рамках з ортогональними осями повертання блока сервоприводу, керуючий вхід блока сервоприводу є третім входом сенсорного блока, вихід блока сервоприводу є третім виходом сенсорного блока, блок аналогової обробки сигналів, який містить двоканальний підсилювач проміжної частоти з розділенням в кожному із каналів радіотеплових і радіолокаційних сигналів по частоті, пристрій фільтрації сигналу радіометричного каналу, пристрій формування модулюючих сигналів і захисту передавача, причому перший і другий входи двоканального підсилювача проміжної частоти з розділенням в кожному із каналів радіотеплових і радіолокаційних сигналів по частоті є, відповідно, першим і другим входом блока аналогової обробки сигналів, перший і другий виходи двоканального підсилювача проміжної частоти з розділенням в кожному із каналів радіотеплових і радіолокаційних сигналів по частоті з'єднані, відповідно, з першим і другим входами пристрою фільтрації сигналу радіометричного каналу, третій і четвертий виходи двоканального підсилювача проміжної частоти з розділенням в кожному із каналів радіотеплових і радіолокаційних сигналів по частоті є, відповідно, третім і четвертим виходами блока аналогової обробки сигналів, перший і другий виходи пристрою фільтрації сигналу радіометричного каналу є, відповідно, першим і другим виходами блока аналогової обробки сигналів, вхід і вихід пристрою формування модулюючих сигналів і захисту передавача є, відповідно, третім входом та п'ятим виходом блока аналогової обробки сигналів, а також містить блок цифрової обробки сигналів і керування, який містить апаратно-програмний блок драйвера, аналого-цифровий перетворювач (АЦП) радіометричних каналів, АЦП радіолокаційних каналів, апаратно-програмний блок накопичення сигналів, апаратно-програмний блок вимірювання відстані і швидкості, апаратно-програмний блок визначення кутових координат цілі, апаратно-програмний блок переключення на роботу по пасивному каналу, апаратно-програмний блок переключення на широку діаграму спрямованості, апаратно-програмний блок оцінки кутової швидкості лінії візування, апаратно-програмний блок екстраполяції кутової швидкості лінії візування, апаратно-програмний блок розв'язування установки осей сервоприводу від коливань корпусу носія, апаратно-програмний блок керування блоком сервоприводу, апаратно-програмний блок керування блоком сервоприводу і оцінки кутового відхилення лінії візування в умовах знаходження осей сервоприводу на кутах механічного обмеження, апаратно-програмний блок визначення миттєвого кута повертання площини сканування антени, причому квадратурні виходи АЦП радіометричних каналів з'єднані, відповідно, з першими квадратурними входами апаратно-програмного блока накопичення сигналів, квадратурні виходи АЦП радіолокаційних каналів з'єднані, відповідно, з другими квадратурними входами апаратно-програмного блока накопичення сигналів, вихід апаратно-програмного блока накопичення сигналів з'єднаний з входом апаратно-програмного блока вимірювання відстані і швидкості, перший вихід апаратно-програмного блока вимірювання відстані і швидкості з'єднаний з входами апаратно-програмного блока переключення на роботу по пасивному каналу і є одночасно першим виходом блока цифрової обробки сигналів і керування, другий вихід апаратно-програмного блока вимірювання відстані і швидкості з'єднаний з входом апаратно-програмного блока переключення на широку діаграму спрямованості, вихід апаратно-програмного блока переключення на роботу по пасивному каналу з'єднаний з першим входом апаратно-програмного блока визначення кутових координат цілі, другий вхід апаратно-програмного блока визначення кутових координат цілі з'єднаний з другим виходом апаратно-програмного блока визначення миттєвого кута повертання площини сканування антени, вихід апаратно-програмного блока визначення кутових координат цілі з'єднаний з першим входом апаратно-програмного блока оцінки кутової швидкості лінії візування, третій вихід апаратно-програмного блока вимірювання відстані і швидкості з'єднаний з другим входом апаратно-програмного блока оцінки кутової швидкості лінії візування, третій вхід апаратно-програмного блока оцінки кутової швидкості лінії візування з'єднаний з виходом апаратно-програмного блока керування блоком сервоприводу і оцінки кутового відхилення лінії візування в умовах знаходження осей сервоприводу на кутах механічного обмеження, четвертий вхід апаратно-програмного блока оцінки кутової швидкості лінії візування з'єднаний з першим виходом апаратно-програмного блока драйвера, перший вихід апаратно-програмного блока оцінки кутової швидкості лінії візування з'єднаний з першим входом апаратно-програмного блока драйвера, другий вихід апаратно-програмного блока оцінки кутової швидкості лінії візування з'єднаний з першими входами апаратно-програмного блока екстраполяції кутової швидкості лінії візування і апаратно-програмного блока керування блоком сервоприводу, перший вихід апаратно-програмного блока екстраполяції кутової швидкості лінії візування з'єднаний з другим входом апаратно-програмного блока драйвера, другий вихід апаратно-програмного блока екстраполяції кутової швидкості лінії візування з'єднаний з входом апаратно-програмного блока розв'язування установки осей сервоприводу від коливань корпусу носія, вихід апаратно-програмного блока розв'язування установки осей сервоприводу від коливань корпусу носія з'єднаний з третім входом апаратно-програмного блока керування блоком сервоприводу, двосторонній вхід-вихід апаратно-програмного блоку керування блоком сервоприводу з'єднаний з двостороннім входом-виходом апаратно-програмного блока керування блоком сервоприводу і оцінки кутового відхилення лінії візування в умовах знаходження осей сервоприводу на кутах механічного обмеження, двосторонній вхід-вихід апаратно-програмного блока драйвера є інформаційним двостороннім входом-виходом пристрою, вихід апаратно-програмного блока переключення на широку діаграму спрямованості є другим виходом блока цифрової обробки сигналів і керування, треті входи АЦП радіометричних каналів і АЦП радіолокаційних каналів з'єднані між собою і є першим входом блока цифрової обробки сигналів і керування, перший і другий входи АЦП радіолокаційних каналів є, відповідно, другим і третім входами блока цифрової обробки сигналів і керування, перший і другий входи АЦП радіометричних каналів є, відповідно, четвертим і п'ятим входами блока цифрової обробки сигналів і керування, другий вхід апаратно-програмного блока керування блоком сервоприводу є шостим входом блока цифрової обробки сигналів і керування, а вихід апаратно-програмного блока керування блоком сервоприводу є третім виходом блока цифрової обробки сигналів і керування, вхід апаратно-програмного блока визначення миттєвого кута повертання площини сканування антени є сьомим входом блока цифрової обробки сигналів і керування, перший вихід апаратно-програмного блока визначення миттєвого кута повертання площини сканування антени є четвертим виходом блока цифрової обробки сигналів і керування, а також містить блок вторинних джерел живлення, причому перший, другий і третій виходи блока вторинних джерел живлення з'єднані, відповідно, з четвертим входом сенсорного блока, четвертим входом блока аналогової обробки сигналів, та восьмим входом блока цифрової обробки сигналів і керування, перший вхід якого з'єднаний з першим виходом опорного генератора, а другий, третій, четвертий та п'ятий входи, відповідно, з'єднані з третім, четвертим та першим, другим виходами блока аналогової обробки сигналів, шостий і сьомий входи, відповідно, з'єднані з третім і першим виходами сенсорного блока, перший вихід блока цифрової обробки сигналів і керування з'єднаний з входом опорного генератора, другий, третій і четвертий виходи, відповідно, з'єднані з другим, третім та першим входами сенсорного блока, а перший і другий опромінювачі дводзеркальної антени з'єднані безпосередньо, відповідно, з першим і другим входом-виходом двоканального приймально-передавального модуля, в якого перший і другий виходи по проміжній частоті з'єднані з першим і другим входами блока аналогової обробки сигналів, вхід модулюючих сигналів і захисту двоканального приймально-передавального модуля з'єднаний з п'ятим виходом блока аналогової обробки сигналів, третій вхід якого з'єднаний з другим виходом опорного генератора, а вхід блока вторинних джерел живлення є входом живлення пристрою.
Текст
1. Спосіб супроводження цілі, що включає неперервне радіолокаційне вимірювання відносного розташування цілі по відстані, кутових координатах і доплерівському зміщенню частоти відбитого від цілі зондувального сигналу, напрямок надходження якого розрізняють шляхом слідкуючого пеленгування за рахунок сформованих двох вузьких діаграм спрямованості антени, що перетинаються між собою і сканують в просторі в точці перетину діаграм спрямованості антени і оптичної лінії візування антени на ціль навколо цієї лінії візування, який відрізняється тим, що додатково проводять пасивну пеленгацію цілі радіометричним каналом, а також порівняння кутового шуму в активному радіолокаційному каналі пеленгації з шумовими похибками в пасивному радіометричному каналі пеленгації і, при перевищенні кутового шуму в активному радіолокаційному каналі пеленгації над шумовими похибками в пасивному радіометричному каналі пеленгації, проводять автоматичне переключення контуру супроводу з активного радіолокаційного каналу на пасивний радіометричний канал. 2. Спосіб супроводження цілі за п. 1, який відрізняє ться тим, що при наближенні цілі до системи, що її супроводжує, на відстань, при якій кутові розміри цілі стають співвимірні з шириною 2 (19) 1 3 81384 тим, що додатково введені сенсорний блок, який містить механізм зміни типу контррефлектора, механізм розкручування, блок сервоприводу, причому механізм розкручування своєю рухомою віссю механічно з'єднаний з дводзеркальною антеною і двоканальним приймальнопередавальним модулем, вхід механізму розкручування є першим входом сенсорного блока, вихід механізму розкручування є першим виходом сенсорного блока, виконавчий елемент механізму зміни типу контррефлектора механічно зв'язаний з контррефлектором дводзеркальної антени, вхід механізму зміни типу контррефлектора є другим входом сенсорного блока, механізм розкручування і двоканальний приймально-передавальний модуль механічно закріплені на рамках з ортогональними осями повертання блока сервоприводу, керуючий вхід блока сервоприводу є третім входом сенсорного блока, вихід блока сервоприводу є третім виходом сенсорного блока, блок аналогової обробки сигналів, який містить двоканальний підсилювач проміжної частоти з розділенням в кожному із каналів радіотеплових і радіолокаційних сигналів по частоті, пристрій фільтрації сигналу радіометричного каналу, пристрій формування модулюючих сигналів і захисту передавача, причому перший і другий входи двоканального підсилювача проміжної частоти з розділенням в кожному із каналів радіотеплових і радіолокаційних сигналів по частоті є, відповідно, першим і другим входом блока аналогової обробки сигналів, перший і другий ви ходи двоканального підсилювача проміжної частоти з розділенням в кожному із каналів радіотеплових і радіолокаційних сигналів по частоті з'єднані, відповідно, з першим і другим входами пристрою фільтрації сигналу радіометричного каналу, третій і четвертий виходи двоканального підсилювача проміжної частоти з розділенням в кожному із каналів радіотеплових і радіолокаційних сигналів по частоті є, відповідно, третім і четвертим виходами блока аналогової обробки сигналів, перший і другий виходи пристрою фільтрації сигналу радіометричного каналу є, відповідно, першим і другим виходами блока аналогової обробки сигналів, вхід і вихід пристрою формування модулюючих сигналів і захисту передавача є, відповідно, третім входом та п'ятим виходом блока аналогової обробки сигналів, а також містить блок цифрової обробки сигналів і керування, який містить апаратно-програмний блок драйвера, аналого-цифровий перетворювач (АЦП) радіометричних каналів, АЦП радіолокаційних каналів, апаратно-програмний блок накопичення сигналів, апаратно-програмний блок вимірювання відстані і швидкості, апаратнопрограмний блок визначення кутових координат цілі, апаратно-програмний блок переключення на роботу по пасивному каналу, апаратнопрограмний блок переключення на широку діаграму спрямованості, апаратно-програмний блок оцінки кутової швидкості лінії візування, апаратно-програмний блок екстраполяції кутової швидкості лінії візування, апаратно-програмний 4 блок розв'язування установки осей сервоприводу від коливань корпусу носія, апаратно-програмний блок керування блоком сервоприводу, апаратнопрограмний блок керування блоком сервоприводу і оцінки кутового відхилення лінії візування в умовах знаходження осей сервоприводу на кутах механічного обмеження, апаратно-програмний блок визначення миттєвого кута повертання площини сканування антени, причому квадратурні виходи АЦП радіометричних каналів з'єднані, відповідно, з першими квадратурними входами апаратно-програмного блока накопичення сигналів, квадратурні виходи АЦП радіолокаційних каналів з'єднані, відповідно, з другими квадратурними входами апаратно-програмного блока накопичення сигналів, вихід апаратнопрограмного блока накопичення сигналів з'єднаний з входом апаратно-програмного блока вимірювання відстані і швидкості, перший вихід апаратно-програмного блока вимірювання відстані і швидкості з'єднаний з входами апаратнопрограмного блока переключення на роботу по пасивному каналу і є одночасно першим виходом блока цифрової обробки сигналів і керування, другий вихід апаратно-програмного блока вимірювання відстані і швидкості з'єднаний з входом апаратно-програмного блока переключення на широку діаграму спрямованості, вихід апаратно-програмного блока переключення на роботу по пасивному каналу з'єднаний з першим входом апаратно-програмного блока визначення кутових координат цілі, другий вхід апаратно-програмного блока визначення кутових координат цілі з'єднаний з другим виходом апаратно-програмного блока визначення миттєвого кута повертання площини сканування антени, вихід апаратно-програмного блока визначення кутових координат цілі з'єднаний з першим входом апаратно-програмного блока оцінки кутової швидкості лінії візування, третій вихід апаратно-програмного блока вимірювання відстані і швидкості з'єднаний з другим входом апаратно-програмного блока оцінки кутової швидкості лінії візування, третій вхід апаратнопрограмного блока оцінки кутової швидкості лінії візування з'єднаний з виходом апаратнопрограмного блока керування блоком сервоприводу і оцінки кутового відхилення лінії візування в умовах знаходження осей сервоприводу на кутах механічного обмеження, четвертий вхід апаратно-програмного блока оцінки кутової швидкості лінії візування з'єднаний з першим виходом апаратно-програмного блока драйвера, перший вихід апаратно-програмного блока оцінки кутової швидкості лінії візування з'єднаний з першим входом апаратно-програмного блока драйвера, другий вихід апаратнопрограмного блока оцінки кутової швидкості лінії візування з'єднаний з першими входами апаратнопрограмного блока екстраполяції кутової швидкості лінії візування і апаратно-програмного блока керування блоком сервоприводу, перший вихід апаратно-програмного блока екстраполяції кутової швидкості лінії візування з'єднаний з другим входом апаратно-програмного блока 5 81384 6 драйвера, другий вихід апаратно-програмного блока екстраполяції кутової швидкості лінії візування з'єднаний з входом апаратнопрограмного блока розв'язування установки осей сервоприводу від коливань корпусу носія, вихід апаратно-програмного блока розв'язування установки осей сервоприводу від коливань корпусу носія з'єднаний з третім входом апаратнопрограмного блока керування блоком сервоприводу, двосторонній вхід-вихід апаратнопрограмного блоку керування блоком сервоприводу з'єднаний з двостороннім входомвиходом апаратно-програмного блока керування блоком сервоприводу і оцінки кутового відхилення лінії візування в умовах знаходження осей сервоприводу на кутах механічного обмеження, двосторонній вхід-вихід апаратно-програмного блока драйвера є інформаційним двостороннім входом-виходом пристрою, вихід апаратнопрограмного блока переключення на широку діаграму спрямованості є другим виходом блока цифрової обробки сигналів і керування, треті входи АЦП радіометричних каналів і АЦП радіолокаційних каналів з'єднані між собою і є першим входом блока цифрової обробки сигналів і керування, перший і другий входи АЦП радіолокаційних каналів є, відповідно, другим і третім входами блока цифрової обробки сигналів і керування, перший і другий входи АЦП радіометричних каналів є, відповідно, четвертим і п'ятим входами блока цифрової обробки сигналів і керування, другий вхід апаратно-програмного блока керування блоком сервоприводу є шостим входом блока цифрової обробки сигналів і керування, а вихід апаратно-програмного блока керування блоком сервоприводу є третім виходом блока цифрової обробки сигналів і керування, вхід апаратно-програмного блока визначення миттєвого кута повертання площини сканування антени є сьомим входом блока цифрової обробки сигналів і керування, перший вихід апаратнопрограмного блока визначення миттєвого кута повертання площини сканування антени є четвертим виходом блока цифрової обробки сигналів і керування, а також містить блок вторинних джерел живлення, причому перший, другий і третій виходи блока вторинних джерел живлення з'єднані, відповідно, з четвертим входом сенсорного блока, четвертим входом блока аналогової обробки сигналів, та восьмим входом блока цифрової обробки сигналів і керування, перший вхід якого з'єднаний з першим виходом опорного генератора, а другий, третій, четвертий та п'ятий входи, відповідно, з'єднані з третім, четвертим та першим, другим виходами блока аналогової обробки сигналів, шостий і сьомий входи, відповідно, з'єднані з третім і першим виходами сенсорного блока, перший вихід блока цифрової обробки сигналів і керування з'єднаний з входом опорного генератора, другий, третій і четвертий виходи, відповідно, з'єднані з другим, третім та першим входами сенсорного блока, а перший і другий опромінювачі дводзеркальної антени з'єднані безпосередньо, відповідно, з першим і другим входом-виходом двоканального приймально-передавального модуля, в якого перший і другий виходи по проміжній частоті з'єднані з першим і другим входами блока аналогової обробки сигналів, вхід модулюючих сигналів і захисту двоканального приймальнопередавального модуля з'єднаний з п'ятим виходом блока аналогової обробки сигналів, третій вхід якого з'єднаний з другим виходом опорного генератора, а вхід блока вторинних джерел живлення є входом живлення пристрою. Винахід належить до галузі радіотехніки, а саме до радіолокації. Відомий спосіб супроводження цілі [1], оснований на неперервному радіолокаційному вимірюванні відносного розташування цілі по відстані, кутових координатах і допплерівському зміщенню частоти відбитого від цілі зондувального сигналу, напрямок приходу якого розрізняють шляхом слідкуючого пеленгування за рахунок сформованої, відповідним чином, вузької діаграми спрямованості антени системи супроводження цілі, яка має конічне сканування в просторі навколо оптичної лінії візування антени на ціль. Основними недоліками цього способу є велика чутливість способу до амплітудних флуктуацій сигналу, низька стабільність авто супроводу цілі в умовах перевищення кутових розмірів цілі границі пеленгаційної характеристики системи авто супроводу цілі. Найбільш близьким по сукупності ознак є спосіб супроводження цілі [2], оснований на неперервному радіолокаційному вимірюванні відносного розташування цілі по відстані, кутових координатах і допплерівському зміщенню частоти відбитого від цілі зондувального сигналу, напрямок приходу якого розрізняють шляхом слідкуючого пеленгування за рахунок сформованих двох вузьких діаграм спрямованості антени системи супроводження цілі, що перетинаються між собою на рівносигнальному напрямку і сканують в просторі в точці перетину діаграм спрямованості антени і оптичної лінії візування антени на ціль навколо цієї лінії візування. Основними недоліками цього способу є низька стабільність автосупроводу цілі в умовах перевищення кутових розмірів цілі границі пеленгаційної характеристики системи автосупроводу цілі, велика результуюча середньоквадратична флуктуаційна похибка вимірювання відносних кутових координат цілі в зв'язаній системі координат системи супроводження цілі на малих відстанях до цілі, наявність впливу коливань корпусу об'єкта на оцінку кутової швидкості лінії візування, обмеження кутового сектору супроводження цілі кутами механічного обмеження повертання 7 81384 антени, неможливість оцінки кутової швидкості лінії візування на ціль. Найбільш близьким по сукупності технічних ознак до пристрою, який заявляються є пристрій супроводження цілей [3] з використанням способу супроводження цілі, що містить антену, приймально-передавальний пристрій і синхронізатор з блоком керування приймачем, автоматичний вимірювач відстані, вихідні елементи кутомірного пристрою, антена хвилеводним трактом з'єднана з приймальнопередавальним пристроєм, перший вихід синхронізатора і блока керування приймачем з'єднаний з першим входом приймальнопередавального пристрою, другий ви хід синхронізатора і блока керування приймачем з'єднаний з першим входом автоматичного вимірювача відстані, перший вихід автоматичного вимірювача відстані з'єднаний з входом синхронізатора і блока керування приймачем, другий ви хід приймально-передавального пристрою з'єднаний з другим входом автоматичного вимірювачавідстані і першим входом вихідних елементів кутомірного пристрою, вихідні елементи кутомірного пристрою механічно зв'язані з антеною, другий вхід приймальнопередавального пристрою є входом сигналу настроювання приймача, третій вихід приймальнопередавального пристрою є виходом приймача, третій вхід автоматичного вимірювача відстані є входом сигналу цілевказівок, четвертий вхід автоматичного вимірювача відстані є входом коректую чого сигналу давача прискорення, третій вихід автоматичного вимірювача відстані є виходом оберненого зв'язку в ланці цілевказівок по відстані, четвертий вихід автоматичного вимірювача відстані є виходом по відстані і похідній відстані для автопілота, другий вхід вихідних елементів кутомірного пристрою є входом коректуючого сигналу давача кутової швидкості, третій вхід ви хідних елементів кутомірного пристрою є входом сигналу керування антеною, четвертий вхід ви хідних елементів кутомірного пристрою є входом сигналів цілевказівок по кутових координатах, перший вихід вихідних елементів кутомірного пристрою є виходом обернених зв'язків по цілевказівках кутови х координат, другий вихід вихідних елементів кутомірного пристрою є виходом сигналів похибок супроводження по кутових координатах для автопілота. Пристрій працює наступним чином. На пристрій автоматичного вимірювача відстані і вихідні елементи кутомірного пристрою подаються сигнали цілевказування і коректуючи сигнали від гіроскопічних пристроїв, сигнали настроювання приймачів і сигнали керування антеною. Від пристрою надходять імпульсні сигнали приймача і сигнали обернених зв'язків в ланці цілевказівок. Під дією сигналів керування, при необхідності здійснюється огляд простору антеною. Сигнали цілевказування полегшують процес захвату цілі на авто супроводження. За рахунок сигналів цілевказування по кутах, антена встановлюється в напрямку на ціль. В режимі авто супроводження 8 цілі пристрій формує вихідні сигнали, які необхідні для роботи автопілота. До недоліків даного пристрою відносяться: - низька стабільності авто супроводу цілі в умовах перевищення кутових розмірів цілі границі пеленгаційної характеристики системи авто супроводу цілі; - велика результуюча середньоквадратична флуктуаційна похибка вимірювання відносних кутови х координат цілі в зв'язаній системі координат системи супроводження цілі на малих відстанях до цілі; - необхідність отримання коректуючи х сигналів від інерційної системи літального апарата для забезпечення розв'язування кутових переміщень антени і коливань літального апарата навколо центру мас; - обмеження кутового сектору супроводження цілі кутами механічного обмеження повертання антени; - велика похибка оцінки кутової швидкості лінії візування на ціль на малих відстанях, що обумовлена кутовим шумом. В основу винаходу поставлено задачу удосконалити спосіб супроводження цілі, оснований на неперервному радіолокаційному вимірюванні відносного розташування цілі по відстані, кутових координатах і допплерівському зміщенню частоти відбитого від цілі зондувального сигналу, напрямок приходу якого розрізняють шляхом слідкуючого пеленгування за рахунок сформованих, відповідним чином, двох вузьких діаграм спрямованості антени системи супроводження цілі, що перетинаються між собою на рівносигнальному напрямку і сканують в просторі в точці перетину діаграм спрямованості антени і оптичної лінії візування антени на ціль навколо цієї лінії візування, шляхом додаткового проведення пасивної пеленгації цілі радіометричним каналом, а також порівняння кутового шуму в активному радіолокаційному каналі пеленгації з шумовими похибками в пасивному радіометричному каналі пеленгації і, при перевищенні кутового шуму в активному радіолокаційному каналі пеленгації над шумовими похибками в пасивному радіометричному каналі пеленгації, проведення автоматичного переключення контур у супроводу з активного радіолокаційного каналу на пасивний радіометричний канал, що привело б до зменшення результуючо ї середньоквадратичної флуктуаційної похибки вимірювання відносних кутови х координат цілі в зв'язаній системі координат системи супроводження цілі на малих відстанях до цілі; Крім того удосконалити спосіб супроводження цілі, шляхом додаткового розширення діаграм спрямованості антени, зміщення рівносигнального напрямку відносно оптичної лінії візування антени на ціль на ширину парціальної діаграми спрямованості антени і повертання парціальних діаграм спрямованості антени одночасно навколо цієї лінії візування антени на ціль при наближенні цілі до системи, що її супроводжує, на відстань, при якій кутові розміри цілі стають співвимірні з 9 81384 шириною пеленгаційних характеристик, після перевищення кутового шуму в каналах пеленгації, наперед заданого порогу, що привело б до підвищення стабільності авто супроводу цілі в умовах перевищення кутових розмірів цілі границі пеленгаційної характеристики системи авто супроводу цілі; Крім того удосконалити спосіб супроводження цілі, шляхом додаткового проведення розв'язування рухомих осей привода антени від впливу коливань корпусу об'єкта системи супроводження цілі шляхом розкручування динамічно збалансованих рефлектора і контррефлектора антени навколо оптичної лінії візування антени, формування опорних сигналів для забезпечення виділення сигналів похибок по осях Υ і Ζ, виділення сигналів похибок по осях Υ і Ζ в мережі замкнутого контуру самонаведення, що привело б до зменшення впливу коливань корпусу об'єкта на оцінку кутової швидкості лінії візування без використання складних високої точності додаткових гіроскопічних пристроїв, або сигналів від них. Крім того удосконалити спосіб супроводження цілі, шляхом додаткового підключення інвертованого і підсиленого сигналу похибки супроводження, при повороті осі приводу антени на кут механічного обмеження і оцінки кутового відхилення цілі за межі механічного обмеження кута повертання антени шляхом накопичення з кінцевим запам'ятовуванням сигналу похибки контуру супроводження за межами механічного обмеження, що привело до розширення кутового сектору супроводження цілі. Крім того удосконалити спосіб супроводження цілі, шляхом додаткової оцінки кутової швидкості лінії візування за рахунок Калмановської фільтрації на основі кінематичного рівняння руху об'єкта по даних цілевказування і супроводження цілі, та врахуванні початкового вектору стану при запуску об'єкта системи супроводження цілі, вектору стану об'єкта в процесі супроводження і екстраполяції координат цілі при втраті сигналу, що привело б до оптимізації алгоритмів траєкторного керування об'єктами, які супроводжують ціль. Поставлена задача досягається тим, що в способі супроводження цілі, який включає неперервне радіолокаційне вимірювання відносного розташування цілі по відстані, кутових координатах і допплерівському зміщенню частоти відбитого від цілі зондувального сигналу, напрямок приходу якого розрізняють шляхом слідкуючого пеленгування за рахунок сформованих, двох вузьких діаграм спрямованості антени, що перетинаються між собою і сканують в просторі в точці перетину діаграм спрямованості антени і оптичної лінії візування антени на ціль навколо цієї лінії візування, згідно винаходу, додатково проводять пасивну пеленгацію цілі радіометричним каналом, а також порівняння кутового шуму в активному радіолокаційному каналі пеленгації з шумовими похибками в пасивному радіометричному каналі пеленгації і, при перевищенні кутового шуму в активному 10 радіолокаційному каналі пеленгації над шумовими похибками в пасивному радіометричному каналі пеленгації, проводять автоматичне переключення контуру супроводу з активного радіолокаційного каналу на пасивний радіометричний канал. Крім того, в способі супроводження цілі, згідно винаходу, при наближенні цілі до системи, що її супроводжує, на відстань, при якій кутові розміри цілі стають співвимірні з шириною розкриття пеленгаційних характеристик, після перевищення кутового шум у в каналах пеленгації, наперед заданого порогу, додатково проводять розширення пеленгаційних характеристик системи супроводження цілі шляхом розширення діаграм спрямованості антени, зміщення рівно сигнального напрямку на ширину парціальної діаграми спрямованості антени і повертання парціальних діаграм спрямованості антени одночасно навколо цієї лінії візування антени на ціль. А також в способі супроводження цілі, згідно винаходу, при скануванні діаграм спрямованості антен додатково проводять розв'язування рухомих осей привода антени від впливу коливань корпусу об'єкта системи, що супроводжує ціль, шляхом розкручування динамічно збалансованих рефлектора і контррефлектора антени навколо оптичної осі візування антени, та формування опорних сигналів для забезпечення виділення сигналів похибок по осях Υ і Z, виділення сигналів похибок по осях Υ і Ζ в мережі замкнутого контуру супроводження цілі. Крім того, в способі супроводження цілі, згідно винаходу, при повороті осі приводу антени на кут механічного обмеження на керуючий вхід приводу додатково підключають інвертований і підсилений сигнал похибки супроводження, а оцінку кутового відхилення цілі за межі механічного обмеження кута повертання антени проводять шляхом накопичення з кінцевим запам'ятовуванням сигналу похибки контур у супроводження за межею механічного обмеження. А також в способі супроводження цілі, згідно винаходу, додатково проводять оцінку кутової швидкості лінії візування шляхом Калмановської фільтрації на основі кінематичного рівняння руху об'єкта по даних, цілевказівок і супроводження цілі, та врахуванні початкового вектору стану при запуску об’єкта з системою супроводження цілі, вектору стану об’єкта в процесі супроводження цілі і екстраполяції координат цілі при втраті сигналу. В основу винаходу поставлено другу задачу удосконалити пристрій супроводження цілі, який містить радіопрозорий обтікач, двохзеркальну антену, двохканальний приймальнопередавальний модуль, опорний генератор, шляхом введення в пристрій додаткових пристроїв і нових зв'язків між ними, які забезпечують проведення пасивної пеленгації цілі радіометричним каналом системи супроводження цілі, а також порівняння кутового шум у в активному радіолокаційному каналі пеленгації з шумовими похибками в пасивному радіометричному каналі пеленгації, і при перевищенні кутового шуму в активному радіолокаційному каналі пеленгації над шумовими 11 81384 похибками в пасивному радіометричному каналі пеленгації проведення автоматичного переключення контур у супроводу з активного радіолокаційного каналу на пасивний радіометричний канал, що привело б до зменшення результуючо ї середньоквадратичної флуктуаційної похибки вимірювання відносних кутови х координат цілі в зв'язаній системі координат системи супроводження цілі; Крім того, удосконалити пристрій супроводження цілі, шляхом введення в пристрій додаткових пристроїв і нових зв'язків між ними, які забезпечують розширення пеленгаційних характеристик системи супроводження цілі шляхом розширення діаграм спрямованості антени, зміщення рівно сигнального напрямку відносно оптичної лінії візування антени на ціль на ширину парціальної діаграми спрямованості антени і повертання парціальних діаграм спрямованості антени одночасно навколо цієї лінії візування антени на ціль, що привело б до підвищення стабільності автосупроводження цілі в умовах перевищення кутових розмірів цілі границі пеленгаційної характеристики системи автосупроводження цілі; Крім того, удосконалити пристрій супроводження цілі, шляхом введення в пристрій додаткових пристроїв і нових зв'язків між ними, які забезпечують проведення розв'язування рухомих осей привода антени від впливу коливань корпусу об'єкта системи супроводження цілі шляхом розкручування динамічно збалансованих рефлектора і контррефлектора антени навколо оптичної лінії візування антени, формування опорних сигналів для забезпечення виділення сигналів похибок по осях Υ і Ζ, виділення сигналів похибок по осях Υ і Ζ в мережі замкнутого контуру супроводження цілі, що привело б до зменшення впливу коливань корпуса, об'єкта на оцінку кутової швидкості лінії візування без використання складних високої точності додаткових гіроскопічних пристроїв, або сигналів від них. Крім того, удосконалити пристрій супроводження цілі, шляхом введення в пристрій додаткових пристроїв і нових зв'язків між ними, які забезпечують проведення підключення інвертованого і підсиленого сигналу похибки супроводження, при повороті осі приводу антени на кут механічного обмеження і оцінки кутового відхилення цілі за межі механічного обмеження кута повертання антени шляхом накопичення з кінцевим запам'ятовуванням сигналу похибки супроводження за межею механічного обмеження. Крім того, удосконалити пристрій супроводження цілі, шляхом введення в пристрій додаткових пристроїв і нових зв'язків між ними, які забезпечують проведення оцінки кутової швидкості лінії візування за рахунок Калмановської фільтрації на основі кінематичного рівняння руху об'єкта, по даним цілевказування і супроводження цілі, та врахуванні початкового вектору стану при запуску об’єкта супроводження цілі, вектору стану об'єкта в процесі супроводження і екстраполяції координат цілі при втраті сигналу, що привело б 12 до оптимізації алгоритмів траєкторного керування, об’єктами і, які супроводжують ціль. Поставлені задачі досягаються тим, що в пристрій супроводження цілі, який містить захисний радіо прозорий обтікач, двохзеркальну антену, двохканапьний приймальнопередавальний модуль, опорний генератор, згідно винаходу, додатково введені сенсорний блок, який містить механізм зміни типу контррефлектора, механізм розкручування, блок сервоприводу, причому механізм розкручування своєю рухомою віссю механічно з'єднаний з двохзеркальною антеною і двохканальним приймальнопередавальним модулем, вхід механізму розкручування є першим входом сенсорного блока, вихід механізму розкручування є першим виходом сенсорного блока, виконавчий елемент механізму зміни типу контррефлектора механічно зв'язаний з контррефлектором двохзеркальної антени, вхід механізму зміни типу контррефлектора є другим входом сенсорного блока; механізм розкручування і двохканальнии приймально-передавальний модуль механічно закріплені на рамках з ортогональними осями повертання блока сервоприводу, керуючий вхід блока сервоприводу є третім входом сенсорного блока, вихід блока сервоприводу є третім виходом сенсорного блока, блок аналогової обробки сигналів, який містить двохканальний підсилювач проміжної частоти з розділенням в кожному із каналів радіо теплових і радіолокаційних сигналів по частоті, пристрій фільтрації сигналу радіометричного каналу, пристрій формування модулюючих сигналів і захисту передавача, причому перший і другий входи двохканального підсилювача проміжної частоти з розділенням в кожному із каналів радіо теплових і радіолокаційних сигналів по частоті є відповідно першим і другим входом блока аналогової обробки сигналів, перший і другий виходи двохканального підсилювача проміжної частоти з розділенням в кожному із каналів радіо теплових і радіолокаційних сигналів по частоті з'єднані, відповідно, з першим і другим входами пристрою фільтрації сигналу радіометричного каналу, третій і четвертий виходи дво хканального підсилювача проміжної частоти з розділенням в кожному із каналів радіо теплових і радіолокаційних сигналів по частоті є, відповідно, третім і четвертим виходами блока аналогової обробки сигналів, перший і другий виходи пристрою фільтрації сигналу радіометричного каналу є, відповідно, першим і другим виходами блока аналогової обробки сигналів, вхід і вихід пристрою формування модулюючих сигналів і захисту передавача є, відповідно, третім входом та п'ятим виходом блока аналогової обробки сигналів, блок цифрової обробки сигналів і керування, який містить апаратно-програмний блок драйвера, АЦП радіометричних каналів, АЦП радіолокаційних каналів, апаратно-програмний блок накопичення сигналів, апаратно-програмний блок вимірювання відстані і швидкості, апаратно-програмний блок визначення кутових координат цілі, апаратнопрограмний блок переключення на роботу по 13 81384 пасивному каналу, апаратно-програмний блок переключення на широку діаграму спрямованості, апаратно-програмний блок оцінки кутової швидкості лінії візування, апаратно-програмний блок екстраполяції кутової швидкості лінії візування, апаратно-програмний блок розв'язування установки осей сервоприводу від коливань корпусу носія, апаратно-програмний блок керування блоком сервоприводу, апаратнопрограмний блок керування блоком сервоприводу і оцінки кутового відхилення лінії візування в умовах знаходження осей сервоприводу на кутах механічного обмеження, апаратно-програмний блок визначення миттєвого кута повертання площини сканування антени, причому квадратурні виходи АЦП радіометричних каналів з'єднані, відповідно, з першими квадратурними входами апаратно-програмного блока накопичення сигналів, квадратурні виходи АЦП радіолокаційних каналів з'єднані, відповідно, другими квадратурними входами апаратно-програмного блока накопичення сигналів, вихід апаратнопрограмного блока накопичення сигналів з’єднаний з входом апаратно-програмного блока вимірювання відстані і швидкості, перший вихід апаратно-програмного блока вимірювання відстані і швидкості з'єднаний з входами апаратнопрограмного блока переключення на роботу по пасивному каналу і є одночасно першим виходом блока цифрової обробки сигналів і керування, другий вихід апаратно-програмного блока вимірювання відстані і швидкості з'єднаний з входом апаратно-програмного блока переключення на широку діаграму спрямованості, вихід апаратно-програмного блока переключення на роботу по пасивному каналу з'єднаний з першим входом апаратно-програмного блока визначення кутових координат цілі, другий вхід апаратно-програмного блока визначення кутових координат цілі з'єднаний з другим виходом апаратно-програмного блока визначення миттєвого кута повертання площини сканування антени, вихід апаратно-програмного блока визначення кутових координат цілі з'єднаний з першим входом апаратно-програмного блока оцінки кутової швидкості лінії візування, третій вихід апаратно-програмного блока вимірювання відстані і швидкості з'єднаний з другим входом апаратно-програмного блока оцінки кутової швидкості лінії візування, третій вхід апаратнопрограмного блока оцінки кутової швидкості лінії візування з'єднаний з виходом апаратнопрограмного блока керування блоком сервоприводу і оцінки кутового відхилення лінії візування в умовах знаходження осей сервоприводу на кутах механічного обмеження, четвертий вхід апаратно-програмного блока оцінки кутової швидкості лінії візування з'єднаний з першим виходом апаратно-програмного блока драйвера, перший вихід апаратно-програмного блока оцінки кутової швидкості лінії візування з'єднаний з першим входом апаратно-програмного блока драйвера, другий вихід апаратнопрограмного блока оцінки кутової швидкості лінії візування з'єднаний з першими входами апаратно 14 програмного блока екстраполяції кутової швидкості лінії візування і апаратно-програмного блока керування блоком сервоприводу, перший вихід апаратно-програмного блока екстраполяції кутової швидкості лінії візування з'єднаний з другим входом апаратно-програмного блока драйвера, другий вихід апаратно-програмного блока екстраполяції кутової швидкості лінії візування з’єднаний з входом апаратнопрограмного блока розв’язування установки осей сервоприводу від коливань корпусу носія, вихід апаратно-програмного блока розв'язування установки осей сервоприводу від коливань корпусу носія з'єднаний з третім входом апаратнопрограмного блока керування блоком сервоприводу, двохсторонній вхід вихід апаратно-програмного блока керування блоком сервоприводу з'єднаний з двохстороннім входом виходом апаратно-програмного блока керування блоком сервоприводу і оцінки кутового відхилення лінії візування в умовах знаходження осей сервоприводу на кутах механічного обмеження, двохсторонній вхід - вихід апаратно-програмного блока драйвера є інформаційним двохстороннім входом - виходом пристрою, вихід апаратнопрограмного блока переключення на широку діаграму спрямованості є другим виходом блока цифрової обробки сигналів і керування, треті входи АЦП радіометричних каналів і АЦП радіолокаційних каналів з'єднані між собою і є першим входом блока цифрової обробки сигналів і керування, перший і другий входи АЦП радіолокаційних каналів є відповідно другим і третім входами блока цифрової обробки сигналів і керування, перший і другий входи АЦП радіометричних каналів є відповідно четвертим і п’ятим входами блока цифрової обробки сигналів і керування, а другий вхід апаратно-програмного блока керування блоком сервоприводу є шостим входом блока цифрової обробки сигналів і керування, а вихід апаратно-програмного блока керування блоком сервоприводу є третім виходом блока цифрової обробки сигналів і керування, вхід апаратно-програмного блока визначення миттєвого кута повертання площини сканування антени є сьомим входом блока цифрової обробки сигналів і керування, перший вихід апаратнопрограмного блока визначення миттєвого кута повертання площини сканування антени є четвертим виходом блока цифрової обробки сигналів і керування, блок вторинних джерел живлення, прийому перший, другий і третій виходи блока вторинних джерел живлення з'єднані, відповідно, з четвертим входом сенсорного блока четвертим входом блока аналогової обробки сигналів, та восьмим входом блока цифрової обробки сигналів і керування, перший вхід якого з'єднаний з першим виходом опорного генератора, а другий третій четвертий, п'ятий входи відповідно з'єднані з третім четвертим та першим другим виходами блока аналогової обробки сигналів, а шостий і сьомий входи, відповідно з'єднані з третім і першим виходами сенсорного блока; а перший вихід блока цифрової обробки сигналів і керування з'єднаний з входом опорного генератора, а другий, 15 81384 третій і четвертий виходи відповідно, з'єднані з другим, третім та першим входами сенсорного блока, а перший і другий опромінювачі двохзеркальноі антени з'єднані безпосередньо, відповідно, з першим і другим входом - виходом двох канального приймально-передавального модуляв якого перший і другий виходи по проміжній частоті з'єднані з першим і другим входами блока, аналогової обробки сигналів, вхід модулюючих сигналів і захисту двохканального приймально-передавального модуля, з'єднаний з п'ятим виходом блока аналогової обробки сигналів, третій вхід якого з'єднаний з другим виходом опорного генератора, а вхід блока вторинних джерел живлення є входом живлення пристрою. Здійснення пасивної пеленгації цілі радіометричним каналом системи супроводження цілі, а також порівняння кутового шум у в активному радіолокаційному каналі пеленгації з шумовими похибками в пасивному радіометричному каналі пеленгації, і при перевищенні кутового шуму в активному радіолокаційному каналі пеленгації над шумовими похибками в пасивному радіометричному каналі пеленгації проведення автоматичного переключення контур у супроводу з активного радіолокаційного каналу на пасивний радіометричний канал, дозволило зменшити результуючу середньоквадратичну флуктуаційну похибку вимірювання відносних кутови х координат цілі в зв'язаній системі координат системи супроводження цілі; Введення в спосіб і пристрій додаткового розширення діаграм спрямованості антени, зміщення рівносигнального напрямку відносно оптичної лінії візування антени на ціль на ширину парціальної діаграми спрямованості антени і повертання парціальних діаграм спрямованості антени одночасно навколо цієї лінії візування антени на ціль при наближенні цілі до системи що її супроводжує, на відстань, при якій кутові розміри цілі стають співвимірні з шириною пеленгаційних характеристик, після перевищення кутового шуму в каналах пеленгації, наперед заданого порогу, дозволило підвищити стабільність автосупроводу цілі в умовах перевищення кутови х розмірів цілі границі пеленгаційної характеристики системи автосупроводу цілі; Розв'язування рухомих осей приводу антени від впливу коливань корпусу, об'єкта системи супроводження цілі шляхом розкручування динамічно збалансованих рефлектора і контррефлектора антени з передавачем навколо оптичної лінії візування антени, формування опорних сигналів для забезпечення виділення сигналів похибок по осях Υ і Z, виділення сигналів похибок по осях Υ і Ζ в мережі замкнутого контуру супроводження цілі, дозволило зменшити вплив коливань корпусу об'єкта на оцінку кутової швидкості лінії візування без використання складних високої точності додаткових гіроскопічних пристроїв, або сигналів від них. Підключення інвертованого і підсиленого сигналу похибки супроводження, при повороті осі приводу 16 антени на кут механічного обмеження і оцінка кутового відхилення цілі за межі механічного обмеження кута повертання антени шляхом накопичення з кінцевим запам'ятовуванням сигналу похибки контуру супроводження за межами механічного обмеження, дозволило розширити кутовий сектор супроводження цілі. Оцінка кутової швидкості лінії візування за рахунок Калмановської фільтрації на основі кінематичного рівняння руху об'єкта по даних цілевказування і супроводження цілі, та врахування початкового вектору стану при запуску об'єкта супроводження цілі, вектору стану об'єкта в процесі супроводження і екстраполяції координат цілі при втраті сигналу дозволило оптимізувати алгоритми траєкторного керування об'єктами, які супроводжують ціль. Порівняльний аналіз рішення, яке заявляється з прототипом показує, що запропонований спосіб відрізняється від відомого наявністю нових дій над сигналами при їх випромінюванні, прийманні, а також первинному і вторинному обробленні: здійснення пасивної пеленгації цілі радіометричним каналом системи самонаведення, а також порівняння кутового шуму в активному радіолокаційному каналі пеленгації з шумовими похибками в пасивному радіометричному каналі пеленгації, і при перевищенні кутового шуму в активному радіолокаційному каналі пеленгації над шумовими похибками в пасивному радіометричному каналі пеленгації проведення автоматичного переключення контуру супроводу з активного радіолокаційного каналу на пасивний радіометричний канал, розширення діаграм спрямованості антени, зміщення рівносигнального напрямку відносно оптичної лінії візування антени на ціль на ширину парціальної діаграми спрямованості антени, повертання парціальних діаграм спрямованості антени одночасно навколо цієї лінії візування антени на ціль при наближенні цілі до системи, що супроводжує її, на відстань, при якій кутові розміри цілі стають співвимірні з шириною пеленгаційних характеристик, після перевищення кутового шуму в каналах пеленгації, наперед заданого порогу, розв'язування рухомих осей приводу антени від впливу коливань корпусу об'єкта системи супроводження цілі шляхом розкручування динамічно збалансованих рефлектора і контррефлектора антени з передавачем навколо оптичної лінії візування антени, формування опорних сигналів для забезпечення виділення сигналів похибок по осях Υ і Z, виділення сигналів похибок по осях Υ і Ζ в мережі замкнутого контуру супроводження цілі, підключення інвертованого і підсиленого сигналу похибки супроводження, при повороті осі приводу антени на кут механічного обмеження і оцінка кутового відхилення цілі за межі механічного обмеження кута повертання антени шляхом накопичення з кінцевим запам'ятовуванням сигналу похибки супроводження за межею механічного обмеження, оцінка кутової швидкості лінії візування за рахунок Калмановської фільтрації на основі кінематичного рівняння руху об'єкта по даним цілевказування і супроводження 17 81384 цілі, та врахування початкового вектору стану при запуску об'єкта з системою супроводження цілі, вектору стану об'єкта в процесі самонаведення і екстраполяції координат цілі при втраті сигналу. На Фіг.1 приведена функціональна схема пристрою супроводження цілі. На Фіг.2 зображена пеленгаційна характеристика системи супроводження цілі з позначенням на ній зон стабільного супроводу цілі і зон зриву супроводу цілі. На Фіг.3 зображена розширена пеленгаційна характеристика системи супроводження цілі з позначенням на ній зон стабільного супроводу цілі на фоні пеленгаційної характеристики до розширення. На Фіг.4 приведена залежність сумарної похибки і похибок, обумовлених внутрішнім шумом слідкуючої системи і кутовим шумом. На Фіг.5 приведена залежність середньоквадратичної похибки вимірювання кутів в каналі радіотеплової локації sjT від відстані при двох значеннях ширини діаграми спрямованості антени φ1=2×10-2рад, j2=8×10-2рад і при характеристиках приймального тракту, які можуть бути досягн уті, наприклад, в діапазоні довжин хвиль 3мм: Tсист=2300°К, Δ¦=1,5ГГц ,ηn=0,25. На Фіг.6 приведена залежність від відстані результуючої середньоквадратичної флуктуаційної похибки вимірювання кутів, яка сформована шляхом спряження sφΣ і sφΤ в точці а, або b переключення каналів і переключення ширини діаграми спрямованості антени в точці b. На Фіг.7 приведена схема сканування діаграм спрямованості антени. Пристрій супроводження цілі, який містить (Фіг.1) захисний радіопрозорий обтічник 1, двохзеркальну антену 2, двохканальний приймально-передавальний модуль 3, опорний генератор 4, згідно винаходу, додатково введені сенсорний блок 5, який містить механізм зміни типу контр рефлектора 6, механізм розкручування 7, блок сервоприводу 8, причому механізм розкручування 7 своєю рухомою віссю механічно з'єднаний з двохзеркальною антеною 2 і двохканальним приймально-передавальним модулем 3, вхід механізму розкручування 7 є першим входом сенсорного блока 5, вихід механізму розкручування 7 є першим виходом сенсорного блока 5, виконавчий елемент механізму зміни типу контррефлектора 6 механічно зв'язаний з контррефлектором двохзеркальної антени 2, вхід механізму зміни типу контррефлектора 6 є другим входом сенсорного блока. 5, механізм розкручування 7 і двох канальний приймально-передавальний модуль 3 механічно закріплені на рамках з ортогональними осями повертання блока сервоприводу 8, керуючий вхід блока сервоприводу 8 є третім входом сенсорного блока 5, вихід блока сервоприводу 8 є третім виходом сенсорного блока 5, блок аналогової обробки сигналів, який містить двохканальний підсилювач проміжної частоти з розділенням в кожному із каналів радіотеплових і радіолокаційних сигналів по частоті 10, пристрій фільтрації сигналу 18 радіометричного каналу 11, пристрій формування модулюючих сигналів і захисту передавача 12, причому перший і другий входи двохканального підсилювача проміжної частоти з розділенням в кожному із каналів радіотеплових і радіолокаційних сигналів по частоті 10 є відповідно першим і другим входом блока аналогової обробки сигналів 9, перший і другий виходи двохканального підсилювача проміжної частоти з розділенням в кожному із каналів радіотеплових і радіолокаційних сигналів по частоті 10 з'єднані відповідно з першим і другим входами пристрою фільтрації сигналу радіометричного каналу 11, третій і четвертий виходи двохканального підсилювача проміжної частоти з розділенням в кожному із каналів радіотеплових і радіолокаційних сигналів по частоті 10 є відповідно третім і четвертим виходами блока аналогової обробки сигналів 9, перший і другий виходи пристрою фільтрації сигналу радіометричного каналу 11 є відповідно першим і другим виходами блока аналогової обробки сигналів 9, вхід і вихід пристрою формування модулюючих сигналів і захисту передавача 12 є відповідно третім входом та п'ятим виходом блока аналогової обробки сигналів 9, блок цифрової обробки сигналів і керування 13, який містить, апаратно-програмний блок драйвера 14, АЦП радіометричних каналів 15, АЦП радіолокаційних каналів 16, апаратно-програмний блок накопичення сигналів 17, апаратнопрограмний блок вимірювання відстані і швидкості 18, апаратно-програмний блок визначення кутових координат цілі 19, апаратно-програмний блок переключення на роботу по пасивному каналу 20, апаратно-програмний блок переключення на широку діаграму спрямованості 21, апаратнопрограмний блок оцінки кутової швидкості лінії візування 22, апаратно-програмний блок екстраполяції кутової швидкості лінії візування 23, апаратно-програмний блок розв'язування установки осей сервоприводу від коливань корпусу носія 24, апаратно-програмний блок керування блоком сервоприводу 25, апаратнопрограмний блок керування блоком сервоприводу і оцінки кутового відхилення лінії візування в умовах знаходження осей сервоприводу на кутах механічного обмеження 26, апаратно-програмний блок визначення миттєвого кута повертання площини сканування антени 27, причому квадратурні виходи АЦП радіометричних каналів 15 з'єднані відповідно з першими квадратурними входами апаратно-програмного блока накопичення сигналів 17, квадратурні виходи АЦП радіолокаційних каналів 16 з'єднані відповідно з другими квадратурними входами апаратнопрограмного блока накопичення сигналів 17, вихід апаратно-програмного блока накопичення сигналів 17 з'єднаний з входом апаратно-програмного блока вимірювання відстані і швидкості 18, перший вихід апаратно-програмного блока вимірювання відстані і швидкості 18 з'єднаний з входами апаратно-програмного блока переключення на роботу по пасивному каналу 20 і є одночасно першим виходом блока цифрової обробки сигналів 19 81384 і керування 13, другий вихід апаратно-програмного блока вимірювання відстані і швидкості 18 з’єднаний з входом апаратно-програмного блока переключення на широку діаграму спрямованості 21, вихід апаратно-програмного блокапереключення на роботу по пасивному каналу 20 з'єднаний з першим входом апаратно-програмного блока визначення кутових координат цілі 19, другий вхід апаратно-програмного блока визначення кутових координат цілі 19 з'єднаний з другим виходом апаратно-програмного блока визначення миттєвого кута повертання площини сканування антени 27, вихід апаратно-програмного блока визначення кутови х координат цілі 19 з'єднаний з першим входом апаратно-програмного блока оцінки кутової швидкості лінії візування 22, третій вихід апаратно-програмного блока вимірювання відстані і швидкості 18 з'єднаний з другим входом апаратно-програмного блока оцінки кутової швидкості лінії візування 22, третій вхід апаратно-програмного блока оцінки кутової швидкості лінії візування 22 з'єднаний з виходом апаратно-програмного блока керування блоком сервоприводу і оцінки кутового відхилення лінії візування в умовах знаходження осей сервоприводу на кутах механічного обмеження 26, четвертий вхід апаратно-програмного блока оцінки кутової швидкості лінії візування 22 з'єднаний з першим виходом апаратно-програмного блока драйвера 14, перший вихід апаратно-програмного блока оцінки кутової швидкості лінії візування 22 з'єднаний з першим входом апаратно-програмного блока драйвера 14, другий ви хід апаратнопрограмного блока оцінки кутової швидкості лінії візування 22 з'єднаний з першими входами апаратно-програмного блока екстраполяції кутової швидкості лінії візування 23 і апаратнопрограмного блока керування блоком сервоприводу 25, перший вихід апаратнопрограмного блока екстраполяції кутової швидкості лінії візування 23 з'єднаний з другим входом апаратно-програмного блока драйвера 14, другий вихід апаратно-програмного блока екстраполяції кутової швидкості лінії візування 23 з'єднаний з входом апаратно-програмного блока розв'язування установки осей сервоприводу від коливань корпусу носія 24, вихід апаратнопрограмного блока розв’язування установки осей сервоприводу від коливань корпусу носія 24 з'єднаний з третім входом апаратно-програмного блока керування блоком сервоприводу 25, двохсторонній вхід - вихід апаратно-програмного блока керування блоком сервоприводу 25 з'єднаний з двохстороннім входом - виходом апаратно-програмного блока керування блоком сервоприводу і оцінки кутового відхилення лінії візування в умовах знаходження осей сервоприводу на кутах механічного обмеження 26, двохсторонній вхід-вихід апаратно-програмного блока драйвера 14 є інформаційним двохстороннім входом - виходом пристрою, вихід апаратно-програмного блока перемикання на широку діаграму спрямованості 21 є другим виходом блока цифрової обробки сигналів і керування 13, треті входи АЦП радіометричних 20 каналів 15 і АЦП радіолокаційних каналів 16 з'єднані між собою і є першим входом блока цифрової обробки сигналів і керування 13, перший і другий входи АЦП радіолокаційних каналів 16 є відповідно другим і третім входами блока цифрової обробки сигналів і керування 13, перший і другий входи АЦП радіометричних каналів 15 є відповідно четвертим і п’ятим входами блока цифрової обробки сигналів і керування 13, а другий вхід апаратно-програмного блока керування блоком сервоприводу 25 є шостим входом блока цифрової обробки сигналів і керування 13, а вихід апаратно-програмного блока керування блоком сервоприводу 25 є третім виходом блока цифрової обробки сигналів і керування 13, вхід апаратно-програмного блока, визначення миттєвого кута повертання площини сканування антени 27 є сьомим входом блока цифрової обробки сигналів і керування 13, перший вихід апаратно-програмного блока визначення миттєвого кута повертання площини сканування антени 27 є четвертим виходом блока цифрової обробки сигналів і керування 13, блок вторинних джерел живлення 28, при чому перший, другий і третій виходи блока вторинних джерел живлення 28 з'єднані відповідно з четвертим входом сенсорного блока 5, четвертим входом блока аналогової обробки сигналів 9, та восьмим входом блока цифрової обробки сигналів і керування 13, перший вхід якого з'єднаний з першим виходом опорного генератора 4, а другий третій четвертий, п'ятий входи відповідно з'єднані з третім четвертим та першим другим виходами блока аналогової обробки сигналів 9, а шостий і сьомий входи, відповідно, з'єднані з третім і першим виходами сенсорного блока 5, а перший вихід блока цифрової обробки сигналів і керування 13 з'єднаний з входом опорного генератора 4, а другий, третій і четвертий виходи, відповідно, з'єднані з другим, третім та першим входами сенсорного блока 5, а перший і другий опромінювані двохзеркальної антени 2 з'єднані безпосередньо відповідно з першим і другим входом-виходом двох канального приймальнопередавального модуля 3, в якого перший і другий виходи по проміжній частоті, з'єднані з першим і другим входами блока аналогової обробки сигналів 9, вхід модулюючих сигналів і захисту двохканального приймально-передавального модуля 3 з'єднаний з п'ятим виходом блока аналогової обробки сигналів 9, третій вхід якого з'єднаний з другим виходом опорного генератора 4, а вхід блока вторинних джерел живлення 28 є входом живлення пристрою. Даний спосіб супроводження цілі реалізується наступним чином. В слідкуючій системі супроводження цілі типова нормована пеленгаційна характеристика, яка формується діаграмами спрямованості антени, має вигляд зображений на Фіг.2. Коли ціль находиться на великий відстані від антени системи що її супроводжує, коли її лінійні розміри набагато менші від відстані, і розміри, якої невеликі в порівнянні з довжиною хвилі зондувального сигналу, вона спостерігається в вигляді невеликих 21 81384 точкових джерел, як по відстані, так і по кутових координатах. В режимі слідкуючого супроводження цілі, сигнал в замкнутому кільці каналу пеленгації знаходиться в зоні нульової точки автосупроводу пеленгаційної характеристики, показаної на Фіг.2. Коли сигнал розузгодження по пеленгаційній характеристиці додатній, то антена повертається вправо, а коли від’ємний то - вліво. Якщо ціль пеленгується основним пелюстком діаграми спрямованості, то антена завжди повертається в напрямку до нульової точки пеленгаційної характеристики і захват і супровід цілі здійснюється стабільно. При наближені цілі до антени системи що її супроводжує, кутові розміри цілі збільшуються і вона спостерігається як протяжна ціль з флуктуацією фазового фронту відбитого сигналу. Флуктуація фазового фронту відбитого від цілі сигналу, обумовлена інтерференцією сигналу, який розсіюється різними елементами цілі і призводить до зміни кута приходу сигналу в межах зони однозначного супроводу цілі, яка показана на Фіг.2. З наближенням цілі до антени системи супроводження цілі центр відбиття, що здається, на протязі певного часу може знаходитись за межами границь цілі, або в межах зон викидання системи з режиму автосупроводу цілі, як показано на Фіг.2. В результаті цього ціль може бути безповоротно втрачена, так як антена згідно Фіг.2 буде повертатись в сторону протилежну від напрямку цілі. По запропонованому способу якщо кутові розміри цілі перевищують на пеленгацій ній характеристиці зону однозначного захвату цілі на автосупровід, розширивши ширину діаграм спрямованості антени, збільшується ширина зони однозначного захвату на супровід цілі, як показано на Фіг.3, що дозволило підвищити стабільність супроводу цілі. Можливості виявлення цілі і формування оцінки вектора вимірювань Ν=[r,β,ε]τ, який визначається параметрами електромагнітного поля, що приймається антеною і який містить в собі полярні координати цілі в зв'язаній системі координат системи супроводу цілі, визначаються характеристиками радіолокаційного контрасту цілі і енергетичними параметрами системи супроводу цілі. Радіолокаційний контраст визначається співвідношенням рівнів сигналів, які формуються ціллю і навколишнім середовищем в елементі роздільної здатності системи спостереження. Сигнали формуються за рахунок радіофізичних властивостей цілей по відбиттю і розсіюванню електромагнітного поля зовнішніх джерел випромінювання. Такими джерелами можуть бути або автономний радіопередавач системи супроводу (активна радіолокація), або радіотеплове випромінювання Землі і атмосфери (теплова радіолокація). Найгірший випадок має місце тоді, коли ціль спостерігається на фоні відбиваючої поверхні Землі і в умовах одночасної дії об'ємно розподілених завад. В цьому випадку контраст цілі в режимі активної радіолокації визначається виразом 22 sÖ (1) ka = , S t × s0 + Vt × hn s де Ö - ефективна відбиваюча поверхня цілі; l St = r × d t d - площа поверхні Землі в елементі роздільної здатності; l - довжина хвилі електромагнітного випромінювання; d - діаметр антени; r - відстань між ціллю і системою супроводу цілі; d t - довжина елемента роздільної здатності по відстані; Vt = p l2 2 × × r ×dt 8 d2 - об’єм елемента роздільної здатності; s 0 - питома ефективна поверхня розсіяння одиниці площі підстилаючої поверхні, яка спостерігається під кутом ковзання u , h n - питома ефективна поверхня розсіяння одиниці об'єму; Радіотепловий контраст на фоні земної поверхні визначається відмінністю радіояскравих температур підстилаючої поверхні і цілі. Радіояскрава температура тіла залежить від його характеристик відбиття і поглинання електромагнітної енергії. Якщо провідність поверхні цілі на фоні Землі суттєво перевищує провідність підстилаючої поверхні, то можна прийняти радіояскраву температуру поверхні Землі рівну Т3=300°К, а радіояскраву температуру цілі Тц - рівну радіояскравій температурі неба Тн. Приріст шумової температури антени системи супроводу цілі, при наведені її діаграми спрямованості на ціль з врахуванням кутового розміру цілі і радіояскравої температури середовища, в якому вона поширюється, яка рівна Т3 і визначається виразом 2 ægö g (2) DTa = ç ÷ × (TH - TЗ ) × exp(- a × r ) при £1 , ç j÷ j è ø l j= d - кутовий розхил діаграми спрямованості де антени; l g= r - кутовий розмір цілі; l - лінійний розмір цілі; α - коефіцієнт затухання електромагнітної хвилі в середовищі поширення; З наближенням цілі до системи супроводу співвідношення між кутовим розміром цілі і і кутовим розхилом діаграми спрямованості антени зростає в квадратній залежності, а значить в квадратній залежності зростає приріст шумової температури антени системи супроводу цілі. Позитивна особливість радіотеплового випромінювання полягає в тому, що його просторова ізотропність і широкосмуговість 23 81384 обумовлюють мінімальні флуктуації положення ефективного центру відбиття в межах геометричної площі цілі. Ця особливість забезпечує потенційну можливість супроводу по кутови х координатах на малих відстанях до цілі, кутові розміри, якої займають значну частину діаграми спрямованості антени системи супроводу, з мінімальними флуктуаційними похибками. Формування оцінок вектора N здійснюється після прийняття рішення по виявленню в режимі автоматичного супроводу цілі по відстані r і кутови х координатах β, ε. В похибку вимірювання входять три складові: - похибки, які обумовлені флуктуаціями координат ефективного центру і рівня відбиття сигналу від цілі; - флуктуаційні похибки, які обумовлені внутрішнім шумом приймача; - динамічні похибки контуру супроводу і стабілізації. Для цілі, яка складається із рівномірно розподілених на її поверхні розсіювачів, еквівалентні середньоквадратичні похибки, які обумовлені флуктуаціями координат ефективного центру відбиття сигналу, і рівні: l s j = 0,35 r - по кутови х координатах; æ 2l × wY( Z ) ö ÷ s f = 0,35ç ç ÷ l è ø - по допплерівському зсуву частоти; sr = 0,35l - по відстані, w Y (Z ) де - проекція кутової швидкості лінії візування на осі Y і Z. Потенційні можливості підвищення точності вимірювань за рахунок фільтрації оцінок, що отримуються, обмежуються часом спостереження і інтервалом кореляції процесу змін відбитого сигналу, який спостерігається. Для моделі відбитого від цілі радіолокаційного сигналу з законом розподілу Стерлінга 1-го роду по рівню і з розподілом положення ефективного центру відбиття з рівною імовірністю в межах геометричної площі цілі інтервал кореляції рівний l tC = (3) 2w Y ( Z) × l і при малих кутови х швидкостях лінії візування може суттєво перевищувати інтервал оновлення оцінок, що суттєво обмежує можливості фільтрування. Зменшення похибок вимірювання кутови х координат продовженої цілі на малих відстанях можливе за рахунок переходу на супровід по радіотепловому контрасту. Ознака такого переходу повинна формуватись на основі порівняння кутових флуктуацій сигналу від цілі в каналах активної радіолокації і і радіо теплової локації. Середньоквадратична (RMS) флуктуаційна похибка вимірювання дорівнює s jфл = 2S екв j × D f еф (4) 24 S еквj де, - еквівалентна спектральна густина кутови х флуктуацій на виході кутового дискримінатора; Df еф - ефективна смуга замкнутої слідкуючої системи. Еквівалентна спектральна густина для методу двохканального сканування з компенсацією в активному радіолокаційному каналі дорівнює S екв j = 1 8m 2 а æ × (1 - к )2 × ~ (W) + TP × ç 1 S0 ç 2m 2 ç q 'å (1 + к )2 a è + ö 1 ÷ ÷ q' 2 ÷ å ø (5) pd 2 l - крутизна діаграми спрямованості де, антени в напрямку осі сканування; K2 k= 1 K2 2 - відношення квадратів коефіцієнтів підсилення каналів; ~ S 0 (W ) - нормована спектральна густина флуктуацій амплітуди сигналу на круговій частоті сканування W = 2pfCK; q'å - відношення енергії сигналу за період повторення Тn до спектральної густини внутрішнього шуму з врахуванням втрат обробки. При апроксимації нормованої кореляційної функції флуктуацій амплітуди сигналу експонентою і при визначенні інтервалу кореляції tс по рівню е-1 нормована спектральна густина флуктуації на частоті сканування fC дорівнює ma = ~ S 0 (f CK ) = tC (p × f CK × t C )2 + 1 . (6) При імпульсному зондувальному сигналі з періодом повторення Тn q 'å = де RC × TP 2 × NШ × h' = q × h' , 2 (7) PC - середня потужність прийнятого сигналу за період спостереження; h' £ 1 - коефіцієнт втрат обробки; Сумарна середньоквадратична похибка вимірювання кутів в активному радіолокаційному каналі, обумовлена всіма видами флуктуацій відбитого сигналу і внутрішнім шумом системи, дорівнює s jå = s 2 + s 2фл j j (8) Для прикладу на Фіг.4, приведені залежності від відстані середньоквадратичних похибок s jå , sj i sjôë , згідно з виразами, які приведені вище, при наступних параметрах системи супроводження цілі k=0,5, fCK=100Гц, h' = 0,6, Dfåô = 10Ãö. tC=0,365c, Аналіз залежностей середньоквадратичних похибок s jå , sj i sjôë Фіг.4 показує, що в активному 25 81384 радіолокаційному каналі при заданих обмеженнях на параметри системи встановлення норми на значення сумарної похибки, наприклад £ 0,1° виконуються в межах відстані від 1000м до 2800м. На великих відстанях обмеження обумовлене внутрішнім шумом слідкуючої системи, а на малих відстанях - кутовим шумом, обумовленим флуктуаціями координат ефективного центру відбиття сигналу. Еквівалентна спектральна густина кутових флуктуацій на виході кутового дискримінатора визначається виразом S екв jT = 2 Tсист 2 2 × m 2 × hn × DTa × 2Df а , (9) де, Tсист=Т Ш+Т3 - шумова температура системи; h n < 1 - коефіцієнт втрат, який враховує зміну крутизни пеленгаційної характеристики антени при спостереженні протяжної цілі і втратах приймальному тракті; DTa - приріст шумової температури антени за рахунок цілі; 2Df - подвійна (з врахуванням приймання по дзеркальному каналу) смуга підсилення сигналу по проміжній частоті. Середньоквадратична похибка вимірювання s jT кутів в каналі радіотеплової локації , з врахуванням (2), визначається виразом (10) s jT = 2 S еквj T × Df еф На Фіг.5 для підтвердження вирішення задачі s приведена залежність jT від відстані при двох значеннях ширини діаграми спрямованості антени j 1 =2•10-2рад, j 2 =8•10-2paд і при характеристиках приймального тракту, які можуть бути досягнуті, наприклад, в діапазоні довжин хвиль 3мм: Tсист = 2300°K, Df = 15GG ц, hn = 0,25. , На Фіг.6 приведена залежність від відстані результуючої середньоквадратичної флуктуаційної похибки вимірювання кутів, яка сформована s i s jT шляхом спряження jå в точці а, або b переключення каналів і переключення ширини діаграми спрямованості антени в точці b, що підтверджує вирішення задачі, яку поставлено в основу винаходу. Норма на максимальну динамічну похибку d max супроводження і стабілізації просторового положення антени визначається умовою рівності незалежних складових сумарної похибки в системі вимірювання. Ознака tH захвату цілі на супроводження формується безпосередньо по моменту виявлення і замикання контуру авто супроводу. Формування оцінок проекції кутової швидкості ) ) лінії візування wY i wZ здійснюється шляхом Калманівської фільтрації комплексної інформації від інерціальної системи керування літального апарата, на якому встановлена система 26 автосупроводу цілі, і результатів безпосередніх вимірювань в системі автосупроводження цілі на основі кінематичного рівняння руху центра мас літального апарата. Кінематичне рівняння руху мас літального апарата в одній площині має вид: 2× r & 1 (11) w+ w = ( j Ц - j), & r r де, w - кутова швидкість лінії візування в цій площині; jЦ - лінійне нормальне або бокове прискорення цілі; j - лінійне нормальне або бокове прискорення літального апарата. При високій точності вимірювання відстані r можливе обмеження системи рівнянь вимірювань; (12) z1 = w + V, z 2 = j + x, де, V i x - похибки вимірювань. Вводячи позначення x1=ω, x3=jÖ , x4=j, в дискретному представленні отримуємо матричне рівняння стану ) ) (13) X k / k-1 = F × X k-1, ) ) ) ) ) T X k -1 = [x 1, x 2 , x 3 , x 4 ](k -1) де, - вектор стану на попередньому кроці оцінки; 1 - 2 ×r & F= r 0 0 Dt 0 0 1 -1 r r 1 0 0 1 0 0 0 (14) матриця стану; Dt - інтервал дискретизації оцінок. Скоректована по результатах вимірювань оцінка вектору стану на наступному кроці рівна ) ) ) (15) X k = X k /k -1 + A × ( Zk - H × X k / k-1) T де, Р k/k-1•H •(G+H•Рk/k-1•HT)-1 = А матричний коефіцієнт підсилення похибок; Рk/k-1=F•P k-1•FT+Q - ковариаційна матриця похибок оцінювання; Q [4] [4] - ковариаційна матриця доповнення; P0 [4] [4] - початкова ковариаційна матриця похибок оцінювання; 1 0 0 0 H= 0 0 1 0 - матриця вимірювань; G= s2 V 0 0 s2 x матриця дисперсій шумів вимірювань. Дисперсія похибок оцінювання на k-му кроці визначається матрицею Рk=Р k/k-1+A•H•Pk/k-1 (16) Безпосереднє використання вихідного відфільтрованого сигналу можливе тільки для керування сервоприводом з силовою стабілізацією, при якій гіростабілізатор одночасно є приводом для повертання антени. При цьому забезпечується розв'язування чутливого елемента системи супроводження цілі від коливань носія цієї системи. У випадку індикаторної стабілізації чутливого елемента необхідно додатково здійснити перетворення всіх кутів і кутових 27 81384 швидкостей із стартової в зв'язану систему координат. Отримані оцінки згідно формул (1-16) і Фіг.1 Фіг.5 дозволяють зробити висновок про забезпечення підвищення стабільності автосупроводження цілі в умовах перевищення кутови х розмірів цілі границі пеленгаційної характеристики системи автосупроводження цілі, зменшення результуючо ї середньоквадратичної флуктуаційної похибки вимірювання відносних кутови х координат цілі в зв'язаній системі координат системи супроводження цілі, зменшення впливу коливань корпусу об'єкта на оцінку кутової швидкості лінії візування без використання складних високої точності додаткових гіроскопічних пристроїв, або сигналів від них, розширення кутового сектору супроводження цілі при повороті осі приводу антени на кут механічного обмеження, оптимізацію алгоритмів траєкторного керування об'єктами, які супроводжують ціль, що підтверджує вирішення задачі, яку поставлено в основу винаходу. При подачі напруги первинного живлення на вхід пристрою, в блоці вторинних джерел живлення 28 виробляється ряд номіналів напруги живлення, які поступають по четвертому входу на сенсорний блок 5, по четвертому входу на блок аналогової обробки сигналів 9, по восьмому входу на блок цифрової обробки сигналів і керування 13, в яких здійснює за живлення всіх функціональних блоків. Далі на інформаційний двохсторонній вхід вихід пристрою, який з'єднаний з двохстороннім входом - виходом апаратно-програмного блока, драйвера 14 в цифровій формі подаються початкові дані вектора корекції (керування) [ ] T U = t0 , b0 , e 0 , Db , uK ,u T , u p , r0 , V0 , w0Y , w0 Z , jY , jZ , які формуються в інерційній системі керування літальним апаратом, в якому знаходиться пристрій для реалізації способу супроводження цілі: t0 - час (признак) дозволу роботи пристрою; βο,εο- початкові кути азимуту і кута місця захвату цілі в стартовій системі координат; Db - сектор пошуку цілі по куту азимута; r0 - початкова відстань захвату цілі; V0 - початкова лінійна швидкість літального апарата; w 0 Y , w 0Z - початкові кутові швидкості повертання лінії візування навколо осей Y і Z стартової системи координат; uK , uT, uR - кути крену, тангажу, рискання літального апарата; jY, jZ - лінійні прискорення літального апарата по осях Y, Z стартової системи координат. По команді t0, в пристрої для реалізації способу супроводження цілі блок цифрової обробки сигналів і керування 13 приводиться в робочий стан. Початкові дані вектора корекції U з першого виходу апаратно програмного блока, драйвера 14 поступають на четвертий вхід програмно-апаратного блока оцінки кутової швидкості лінії візування 22. В програмноапаратному блоці визначення миттєвого кута повертання площини сканування антени 27 28 формується ряд напруги живлення двигуна розкручування і живлення давачів положення, які з першого виходу апаратно-програмного блока, визначення миттєвого кута повертання площини сканування антени 27 блока цифрової обробки сигналів і керування 13 надходять на вхід механізму розкручування 7, що знаходиться в сенсорному блоці 5. Після надходження напруги живлення механізм розкручування 7 в сенсорному блоці 5 починає повертатись навколо своєї осі з частотою ƒск . 3 початку розкручування механізму розкручування 7, з його виходу сигнал, який несе інформацію про положення міток на рефлекторі двохзеркальної антени 2, а тим самим і інформацію про положення діаграм спрямованості антени відносно осей координат Υ, Ζ, надходить на вхід програмно-апаратного блока; визначення миттєвого кута повертання площини сканування антени 27 блока цифрової обробки сигналів і керування 13. Таким чином забезпечується реалізація просторового сканування двохпроменевої двох канальної системи супроводження цілі, в якій випадкові зміни сигналу, що не зв'язані з корисною модуляцією сигналу, компенсуються (Фіг.7). В програмно-апаратному блоці визначення миттєвого кута повертання площини сканування антени 27 в цифровій формі формуються ортогональні складові опорного сигналу з частотою сканування ƒск діаграм спрямованості антени, по яких визначається кут повертання діаграм спрямованості і які надходять на другий вхід програмно-апаратного блока визначення кутових координат цілі 19. При досягненні оборотів механізму розкручування 7, які відповідають частоті сканування ƒск , з виходу програмно-апаратного блока, керування блоком сервоприводу 25 на вхід блока сервоприводу 8 надходить команда на механічне розблокування рухомих вн утрішньої і зовнішньої рамок блока, сервоприводу 8 і сигнали заживлення електроприводу і давачів кутового положення рамок, які розташовані на осях рамок. На внутрішній рухомій рамці блока сервоприводу 8 механічно закріплені механізм розкручування 7 з жорстко закріпленими на ньому двохзеркальній антені 2, що крутиться навколо своєї осі і нерухомий приймально-передавальний модуль 3 з двох канальним опромінювачем двохзеркальної антени 2. Сигнали, що пропорційні початковим куту азимуту і куту місця захвату цілі в стартовій системі координат βο,εο з виходу програмноапаратного блока керування блоком сервоприводу 25, надійшовши на вхід блока сервоприводу 8, повертають внутрішню і зовнішню рамки цього блока до тих пір поки сигнал оберненого зв'язку, який поступає з виходу блока сервоприводу 8 від його давачів кутового положення рамок не буде рівний заданим кутам βο, εο. Повертання двохзеркальної антени 2 з великою швидкістю навколо своєї осі закріпленої на рухомих рамках блока сервоприводу 8 створює систему силової гідростабілізації чутливого елементу (кутового дискримінатора), утвореного рухомими діаграмами спрямованості антени, розв'язаного від коливань літального апарата по кутах тангажу і рискання. 29 81384 Пристрій формування модулюючих сигналів і захисту передавача 12, синхронізований сигналами опорного генератора 4, формує серію напруг живлення і модулюючі сигнали приймально-передавального модуля 3. Приймально-передавальний модуль 3 генерує імпульсні радіочастотні зондувальні сигнали необхідної потужності, які опромінюють двохзеркальну антену 2 і в відповідності до закону сформованих діаграм спрямованості антени випромінюються в простір через радіопрозорий обтікач 1. Сигнали, що пропорційні сектору просторового пошуку по куту азимуту Δβ захвату цілі з виходу програмно-апаратного блока керування блоком сервоприводу 25, надійшовши на вхід блока сервоприводу 8, заставляють сканувати азимутальну рамку цього блока, в межах сектора азимутальних кутів Δβ , центром якого є азимутальний кут β 0. Зондувальний сигнал досягнувши цілі, перевідбивається від неї і подолавши відстань від цілі до пристрою, що реалізує спосіб супроводження цілі, через радіопрозорий обтікач 1, приймається двохзеркальною антеною 2, перетворюється нею в радіочастотний імпульсний сигнал, і через хвилеводні два канали опромінювачів двохзеркальної антени 2, поступає на хвилеводні входи приймально-передавального модулю 3. Прийняті відбиті від цілі сигнали в приймально-передавальному модулі відповідним чином селектуються, перетворюються по частоті, підсилюються до необхідного рівня, і з двох виходів цього модуля надходять, відповідно, на перший і другий входи двохканального підсилювача проміжної частоти з розділенням в кожному із каналів радіолокаційних і радіотеполових сигналів по частоті 10. В двохканальному ППЧ 10 здійснюється попередні частотна селекція і нормування по рівню радіолокаційних сигналів і радіо теплових сигналів. Радіотеплові сигнали з першого і другого виходів дво хканального ППЧ 10 надходять на відповідні їм перший і другий входи пристрою фільтрації радіометричного каналу 11, де вони сприймаються як приріст шумової температури антени системи супроводу цілі, при наведені її діаграми спрямованості на ціль з врахуванням кутового розміру цілі і радіояскравої температури середовища, в якому вона поширюється, в відповідності з виразом (2). З третього і четвертого виходів дво хканального ППЧ 10 блока аналогової обробки сигналів 9 відбиті радіолокаційні сигнали поступають на відповідні їм перший і другий входи АЦП радіолокаційних сигналів 16, де з допомогою опорних сигналів опорного генератора 4, перетворюються в квадратурні складові в цифровому вигляді. Аналогічним чином сигнали з першого і другого виходів пристрою фільтрації сигналу радіометричного каналу 11 блока аналогової обробки сигналів 9 надходять на відповідні їм перший і другий входи АЦП радіометричних каналів 15 блока цифрової обробки сигналів і керування 13. Перетворення радіометричних сигналів в квадратурні складові в цифровому вигляді здійснюються в АЦП 30 радіометричних каналів 15 аналогічно, як і в АЦП радіолокаційних каналів 16. З виходів АЦП 15 і 16 квадратурні складові радіолокаційних і радіо теплових сигналів в цифровому вигляді поступають відповідно на перші і другі квадратурні входи апаратно-програмного блока накопичення сигналів 17, де вони кожний в своєму каналі відповідним чином здійснюється їх накоплення на інтервалі кореляції tc. З виходу апаратнопрограмного блока накопичення сигналів 17, сигнали, які перевищили заданий поріг виявлення, кожний в своєму каналі, надходять на вхід програмно-апаратного блока вимірювання відстані і швидкості 18. В апаратно-програмному блоці вимірювання відстані і швидкості 18 здійснюється вимірювання відстані до цілі по затримці відбитого радіолокаційного сигналу відносно зондувального, який просочується в приймальних каналах тим же шляхом, що і відбитий, і швидкості цілі шляхом допплерівської фільтрації відбитого радіолокаційного сигналу від цілі і підстилаючої поверхні. В цьому ж блоці здійснюється аналіз флуктуаційних похибок пристрою супроводження цілі в радіолокаційних і радіометричних каналах. На великих відстанях, де приріст шумової температури в радіометричних каналах невеликий, супроводження цілі ведеться по радіолокаційному сигналу (крива σσΣ, Фіг.6) до моменту поки кутовий шум не перевищує задану норму по флуктуаційній похибці супроводження цілі. При перевищенні кутовим шумом заданого порогу флуктуаційної похибки супроводження цілі в апаратно-програмному блоці 18 здійснюється формування команди переключення на широку діаграму спрямованості, яка з другого ви ходу програмно-апаратного блока 18 надходить на апаратно-програмний блок переключення на широку діаграму спрямованості 21, з виходу якого команда надходить на вхід механізму зміни типу контр рефлектора 6. Під дією цієї команди механізм зміни контррефлектора 6 змінює механічно тип контррефлектора, тим самим розширюючи ширину діаграми спрямованості антени 2 і, як наслідок, ширину пеленгаційної характеристики, що підвищує стабільність супроводу цілі при збільшені її кутових розмірів в процесі наближення до пристрою (Фіг.3). На відстанях від 500м по команді з першого виходу апаратно-програмного блока вимірювання відстані і швидкості 18, яка поступає на вхід апаратнопрограмного блока переключення по пасивному каналу 20 і вхід опорного генератора 4 в апаратнопрограмному блоці 20 формується коефіцієнт зміни крутизни пеленгаційної характеристики, який з виходу цього блока передається на перший вхід програмно-апаратного блока визначення кутових координат цілі 19, а в опорному генераторі 4 здійснюється зміна періоду повторення опорного сигналу, яка обумовлює зміну періоду повторення зондувального сигналу. Відповідно на перший, другий і третій входи апаратно-програмного блока оцінки кутової швидкості лінії візування 22 поступають в цифровій формі параметри вектора вимірювань Ν=[r,β,ε]τ, з виходу апаратнопрограмного блока 19 – β, Δβ, ε, Δε, з ви ходу 31 81384 апаратно-програмного блока 26 - r, V , з ви ходу апаратно-програмного блока 26 - оцінки кутового відхилення лінії візування в умовах знаходження осей сервоприводу на кута х механічного обмеження. На четвертий вхід апаратнопрограмного блока 22 з виходу апаратнопрограмного блока драйвера в реальному часі поступають дані вектора = [uK , uT , u P , jX , jY , jZ ]T механічного M збурення пристрою, обумовленого коливанням літального апарата, на якому встановлений пристрій, що реалізує заявлений спосіб супроводження цілі. На основі даних, які перераховані вище в апаратно-програмному блоці 22 здійснюється визначення кутової швидкості лінії візування на основі розв'язання рівнянь (11)...(16). Література: 1.Сопровождение движущи хся целей, Ю.И. Фельдман, Ю.Б. Гидаспов, В.Н. Гомзин, под ред. Фельдмана Ю.И., Μ., ‘’Советское радио’’, 1978, стр.9, 10, 29-52. 2. Сопровождение движущи хся целей, Ю.И. Фельдман, Ю.Б. Гидаспов, В.Н. Гомзин, под ред. Фельдмана Ю.И., М., „Советское радио’’, 1978, стр.10, 11, 29-89. 3. М.В. Максимов, Г.И. Горгонов. Радиоэлектронные системы самонаведення., М.,’’Радио и связь’’, 1982, стр.92, 93. 32 33 81384 34
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for tracking a target and a device for the realization of the method
Автори англійськоюAntoniuk Volodymyr Pavlovych, Hryhorieva Liudmyla Volodymyrivna, Klepfer Yevhenii Ivanovych, Lobur Mykhailo Vasyliovych, LOZOVYI OREST Mykhailovych, Martyniv Myron Stefanovych, Maksymov Serhii Volodymyrovych, Nikitchenko Vitalii Hryhorovych, Chaikovskyi Roman Ivanovych
Назва патенту російськоюСпособ сопровождения цели и устройство для осуществления способа
Автори російськоюАнтонюк Владимир Павлович, Григорьева Людмила Владимировна, Клепфер Евгений Иванович, Лобур Михаил Васильевич, ЛОЗОВОЙ ОРЕСТ Михайлович, Мартынив Мирон Стефанович, Максимов Сергей Владимирович, Никитченко Виталий Григорьевич, Чайковский Роман Иванович
МПК / Мітки
Мітки: спосіб, цілі, пристрій, супроводження, реалізації
Код посилання
<a href="https://ua.patents.su/17-81384-sposib-suprovodzhennya-cili-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб супроводження цілі та пристрій для його реалізації</a>
Спосіб визначення кутових координат цілі і пристрій для його реалізації
Номер патенту: 74230
Опубліковано: 15.11.2005
Автори: Бузанов Віктор Іванович, Черняк Сергій Іванович, Попов Віктор Гаврилович
МПК: F41G 3/22
Мітки: визначення, реалізації, цілі, координат, пристрій, спосіб, кутових
Формула / Реферат:
1. Спосіб визначення кутових координат цілі за допомогою нашоломної системи цілеуказання з нерухомою міткою у візирному пристрої, який включає фіксацію положення візирної лінії шляхом суміщення нерухомої мітки з ціллю та визначення кутових координат візирної лінії, що відповідають кутовим координатам цілі, який відрізняється тим, що за допомогою додаткової рухомої мітки фіксують кут непогодження між положенням візирної лінії, що визначається...
Спосіб прицілювання і стрільби по цілі (варіанти) та пристрій для його реалізації
Номер патенту: 63616
Опубліковано: 15.01.2004
Автори: Марцинюк Віктор Іванович, Стефанович Віктор Тарасович, Глущенко Євген Миколайович, Кравченко Микола Іванович, Демченко Леонтій Іванович, Положенцев В'ячеслав Васильович
Мітки: прицілювання, реалізації, спосіб, цілі, варіанти, пристрій, стрільби
Формула / Реферат:
Корисна модель електрошлакового наплавлення, при якому електродний метал, що присаджують, подають у жужільну ванну, обмежену поверхнею, що наплавляють, і кристалізатором, який відрізняється тим, що наплавлення ведуть під кутом 10-75° до горизонтальної поверхні, при цьому заготівку, що наплавляють, обертають відносно кристалізатора, а кристалізатор переміщають уздовж наплавленої заготівки зі швидкістю, яку визначають датчиком контролю рівня...
Пристрій указання цілі для системи керування вогнем танка
Номер патенту: 49990
Опубліковано: 15.10.2002
Автори: Бондаренко Олександр Григорович, Фролов Леонід Андрійович, Походняков Валерій Георгійович
Мітки: цілі, танка, керування, вогнем, пристрій, указання, системі
Формула / Реферат:
1. Пристрій указання цілі для системи керування вогнем танка, що містить привід башти, блок керування приводом, прилад цілеуказання, пульт наведення, підсилювач наведення, гіростабілізатор, моментний двигун горизонтального наведення, датчик кута горизонтального наведення, схему горизонтального розвантаження, що включає підсилювач горизонтального розвантаження, датчик кута горизонтального розвантаження і моментний двигун горизонтального...
Спосіб прицілювання нашоломною системою цілевказівки і пристрій для його реалізації
Номер патенту: 74236
Опубліковано: 15.11.2005
Автори: Кадочніков Сергій Михайлович, Король Іван Іванович, Черняк Сергій Іванович, Утіркін Микола Володимирович
МПК: F41G 3/22
Мітки: системою, реалізації, нашоломною, пристрій, цілевказівки, спосіб, прицілювання
Формула / Реферат:
1. Спосіб прицілювання нашоломною системою цілевказівки, в основу якого покладено сканування простору знаходження нашоломного вузла з n випромінюючими діодами плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з n випромінюючих діодів і положення n випромінюючих діодів в просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розміщені випромінюючі діоди, який відрізняється тим, що у...
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі

Номер патенту: 19892
Опубліковано: 15.01.2007
Автори: Луковський Олег Ярославович, Квіткін Костянтин Петрович, Петрушенко Микола Миколайович, Гаврілкін Володимир Вільевич, Карлов Володимир Дмитрович, Челпанов Артем Володимирович
МПК: G01S 13/52
Мітки: параметрів, траєкторії, цілі, адаптивний, пристрій, маневруючої, фільтрації
Формула / Реферат:
Адаптивний пристрій фільтрації параметрів траєкторії маневруючої цілі, що містить фільтр Калмана 2-го порядку, фільтр Калмана 3-го порядку і комутатор, який відрізняється тим, що додатково введені блок формування вибірки, блок корегування кореляційної матриці помилок (КМП) вимірювань у складі послідовно з'єднаних першого блока оцінювання середнього, першого блока оцінювання КМП фільтрації і блока розрахунку КМП вимірювань, блок виявлення і...
Попередній патент: Друкарська маркувальна фарба
Наступний патент: Спосіб термообробки заготівок активних лазерних елементів з монокристалів сапфіра, що активовані титаном
Випадковий патент: Спосіб регулювання витрати рідини в трубопроводі та регулятор витрати