Спосіб автоматичного рейтрейсингового вимірювання аберацій з об’єктивним визначенням орієнтації зорової осі
Формула / Реферат
Спосіб автоматичного рейтрейсингового вимірювання аберацій з об'єктивним визначенням орієнтації зорової осі, за яким виконують поточкове, послідовне у часі, зондування ока тонким лазерним променем, приймають лазерне випромінювання, розсіяне сітківкою у зворотному напрямку, за допомогою двовимірного позиційно-чутливого фотодетектора для кожної вхідної точки на зіниці визначають положення світлової плями, створюваної в площині сітківки лазерним променем, за цими даними реконструюють карту хвильового фронту, карту рефракційних похибок та інші характеристики, похідні від цих параметрів, причому перед початком вимірювань виконують координатну прив'язку вимірювального пристрою відносно вертексу зіниці, що визначається як центр принаймні чотирьох перших рефлексів Пуркіньє, а попередня орієнтація зорової осі виконується пацієнтом суб'єктивно шляхом суміщення двох марок, розташованих на оптичній осі інструмента на різній відстані від ока, який відрізняється тим, що зондування в центральній зоні зіниці виконують за допомогою трикомпонентного лазерного пучка паралельних променів, перший з яких є центральним, вісь другого променя зсунута в напрямку осі X, з несучою частотою, зсунутою на величину FX відносно несучої частоти центрального променя, а вісь третього променя зсунута паралельно в напрямку осі Y, з несучою частотою, зсунутою на величину FY відносно несучої частоти центрального променя, приймають випромінювання трикомпонентного лазерного пучка, розсіяне сітківкою у зворотному напрямку, вимірюють різницю фаз на частотах FX та FY за допомогою фазочутливого фотоприймача, причому зондування та вимірювання різниці фаз виконують з її просторовим розрізненням на сітківці в зоні, що своїми розмірами відповідає розмірам центральної ямки жовтої плями (foveola), принаймні в двох точках цієї зони визначають напрям найбільшого нахилу профілю сітківки, за якими знаходять координати центральної - найглибшої - її точки, вимірюють відхилення координат цієї центральної точки від поточного положення, встановленого попередньою координатною прив'язкою та попередньою суб'єктивною орієнтацією оптичної осі пристрою відносно зорової осі ока, використовують величину відхилення як сигнал похибки орієнтації та зміщення оптичної осі вимірювального пристрою, орієнтують та зміщують вісь вимірювального пристрою так, щоб сигнал похибки був зведений до нуля, після чого виконують рейтрейсингове зондування по всій апертурі ока в автоматичному режимі, стартовим сигналом для чого є рівність нулю сигналу похибки, а реконструкцію абераційних параметрів ока виконують відносно об'єктивно визначеної зорової осі ока пацієнта.
Текст
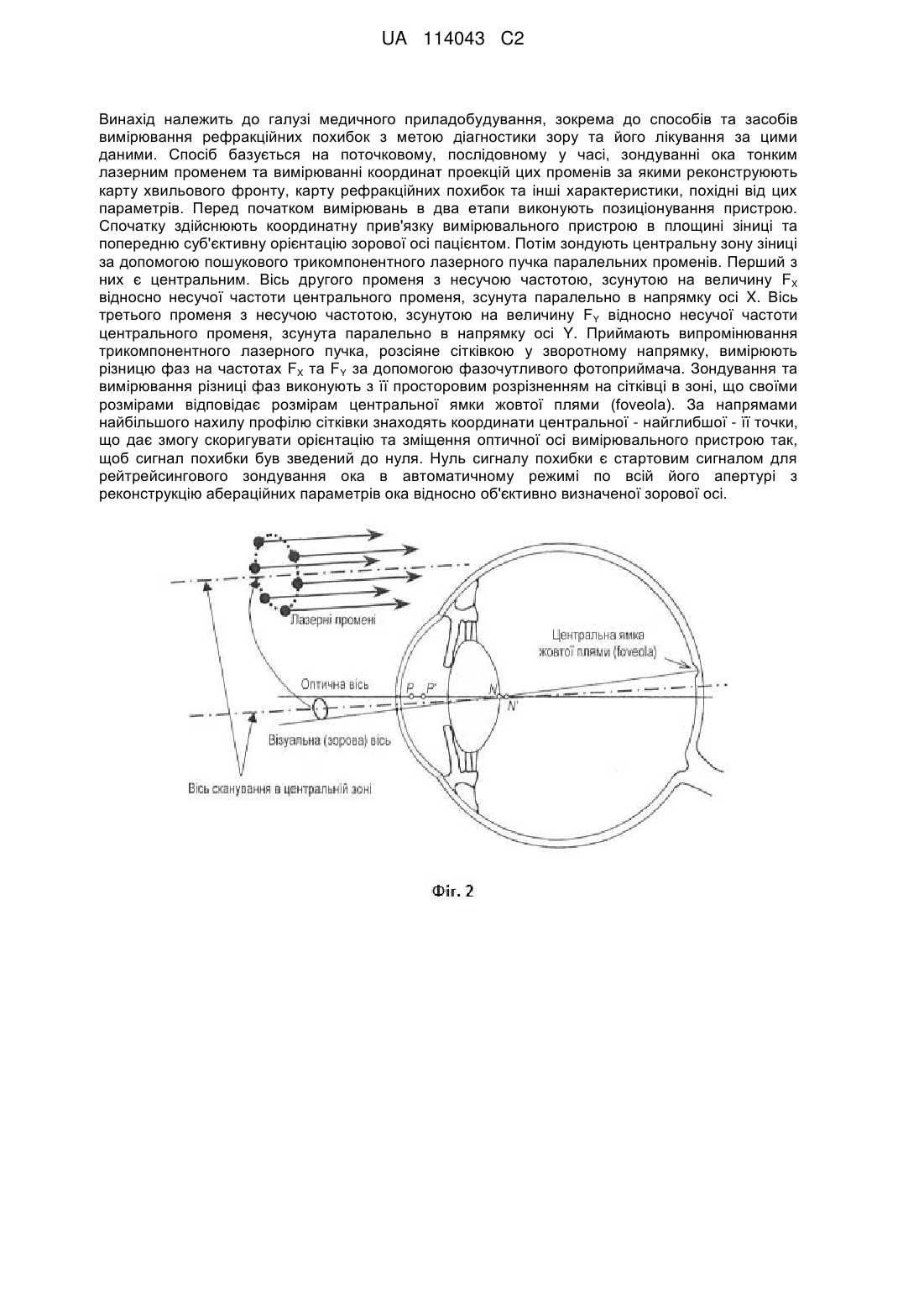
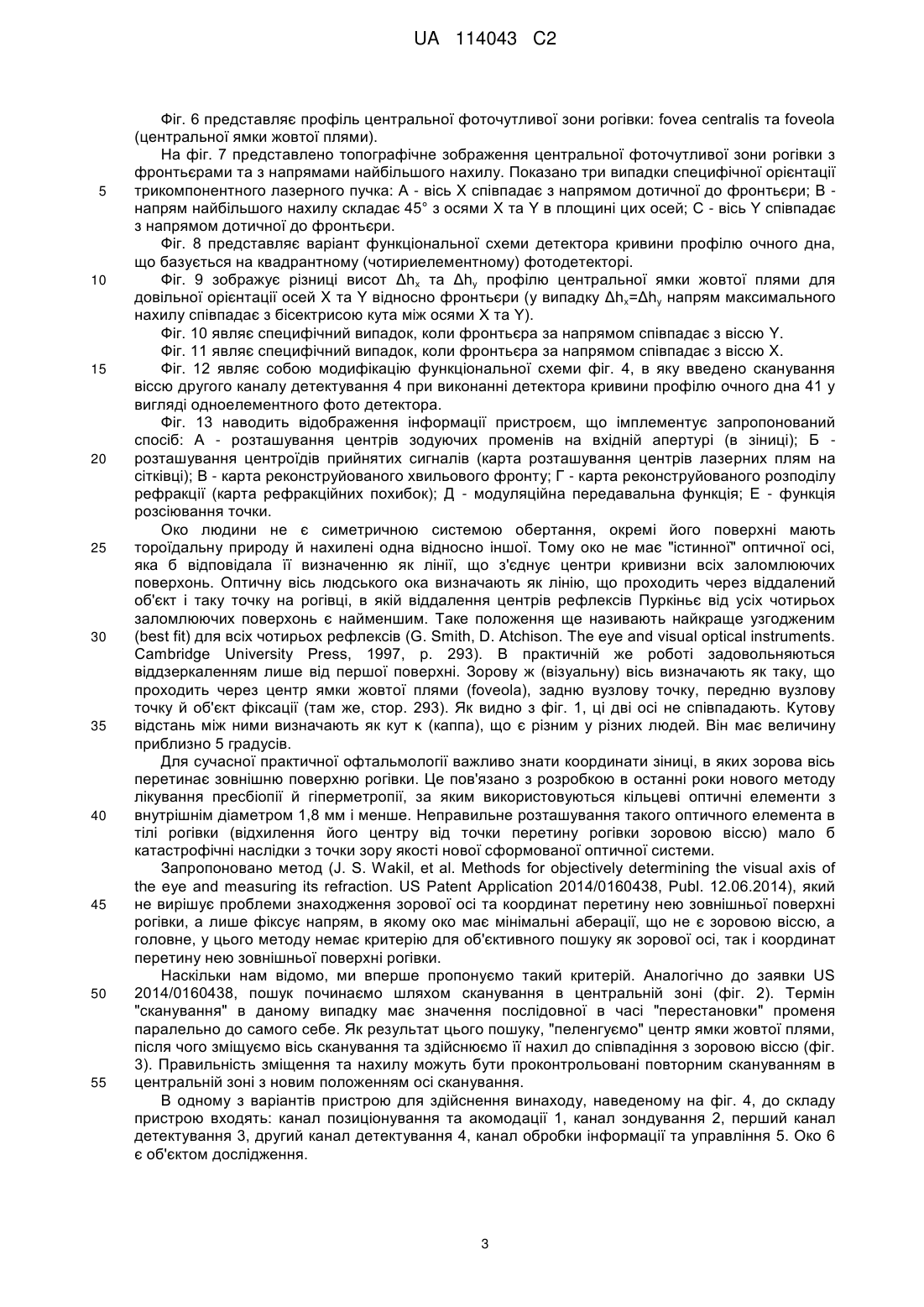
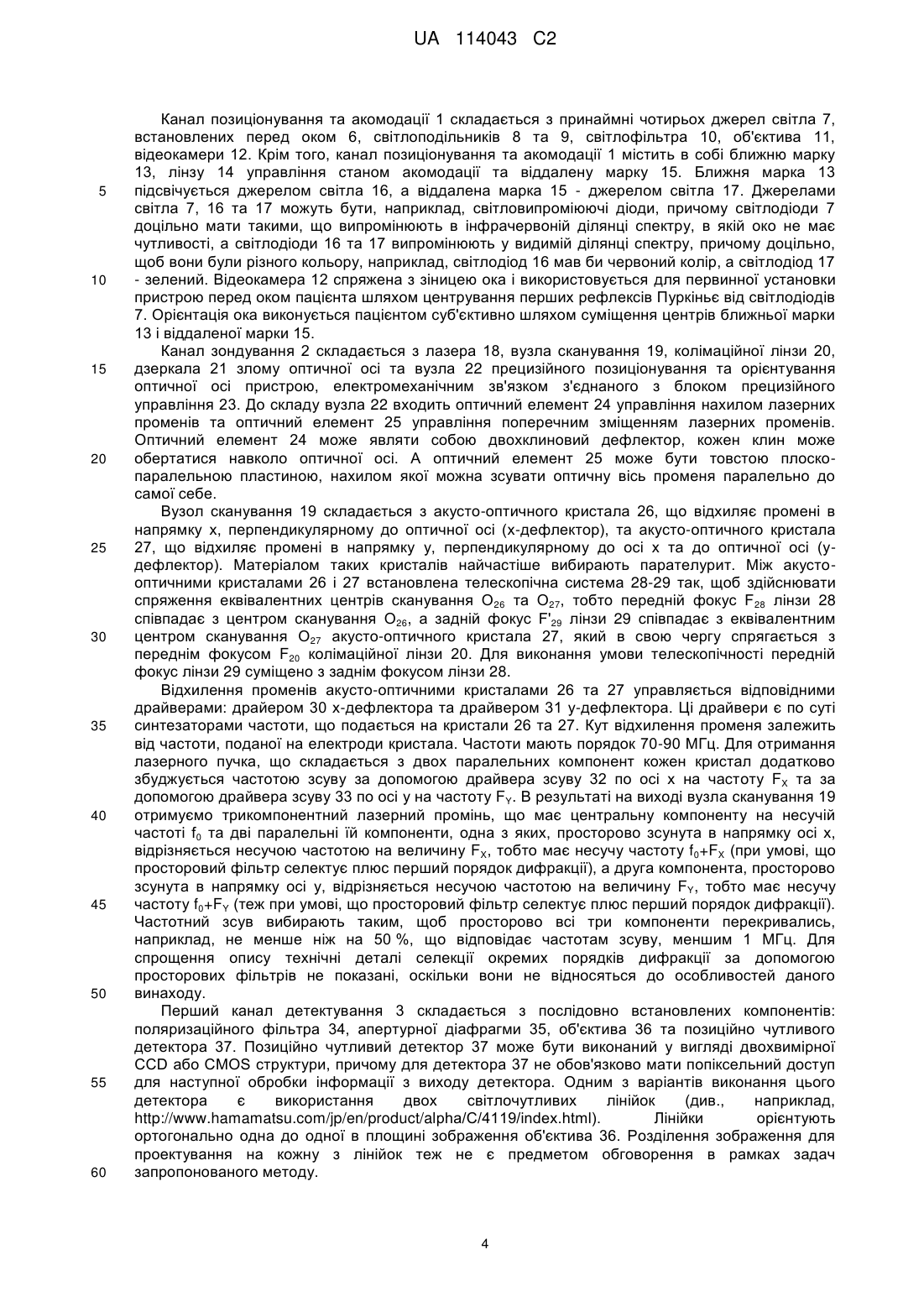
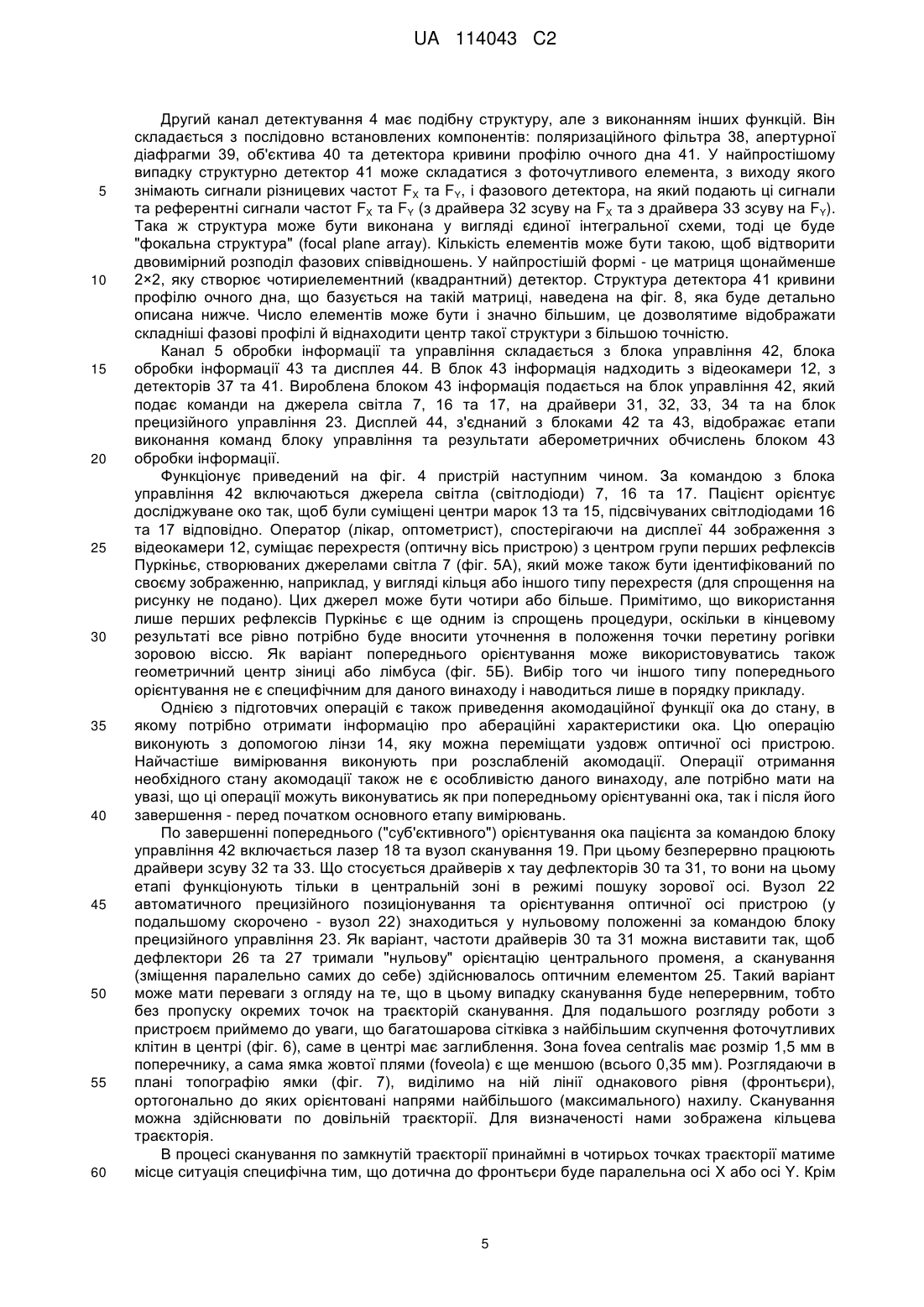
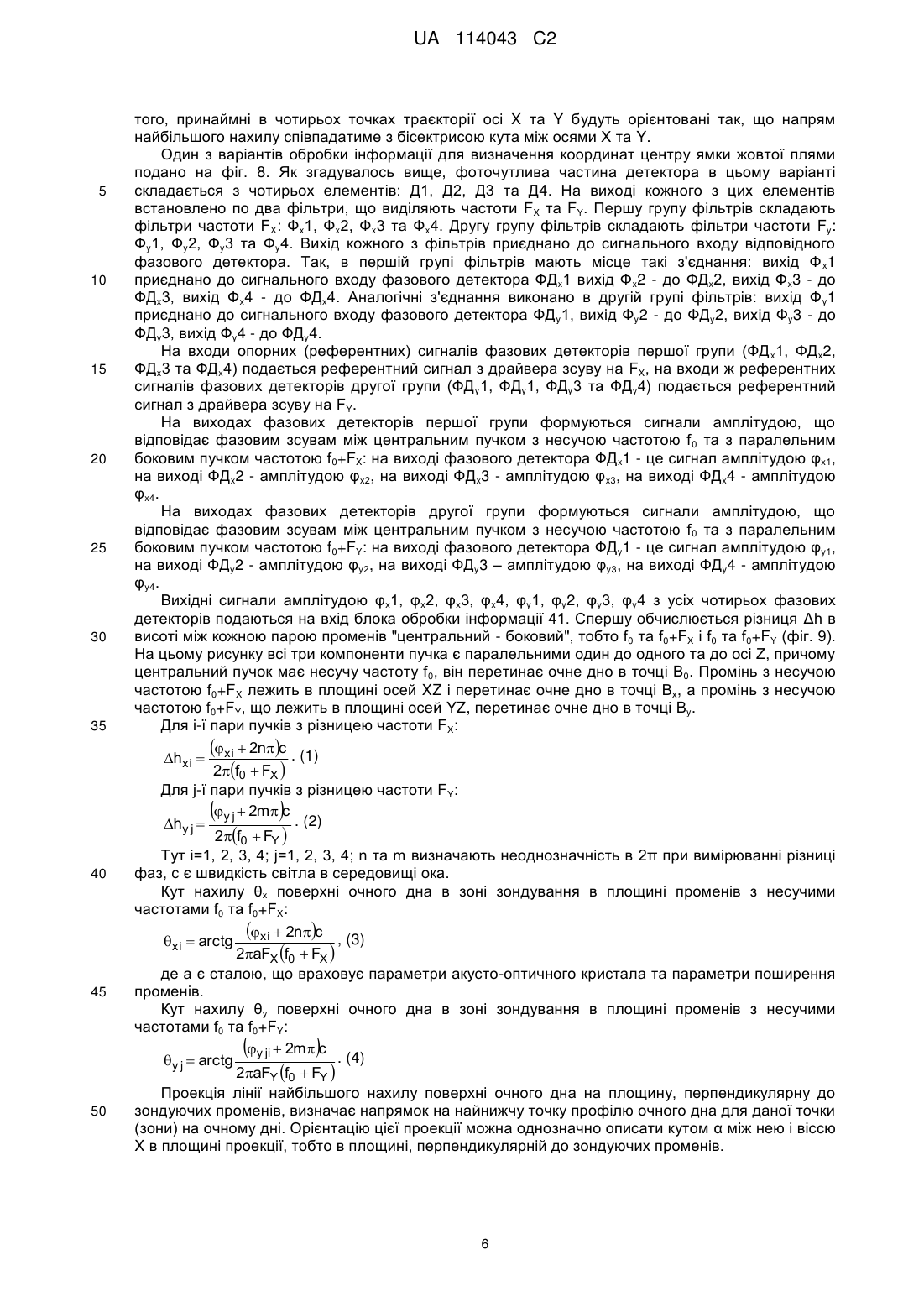
Реферат: UA 114043 C2 (12) UA 114043 C2 Винахід належить до галузі медичного приладобудування, зокрема до способів та засобів вимірювання рефракційних похибок з метою діагностики зору та його лікування за цими даними. Спосіб базується на поточковому, послідовному у часі, зондуванні ока тонким лазерним променем та вимірюванні координат проекцій цих променів за якими реконструюють карту хвильового фронту, карту рефракційних похибок та інші характеристики, похідні від цих параметрів. Перед початком вимірювань в два етапи виконують позиціонування пристрою. Спочатку здійснюють координатну прив'язку вимірювального пристрою в площині зіниці та попередню суб'єктивну орієнтацію зорової осі пацієнтом. Потім зондують центральну зону зіниці за допомогою пошукового трикомпонентного лазерного пучка паралельних променів. Перший з них є центральним. Вісь другого променя з несучою частотою, зсунутою на величину FX відносно несучої частоти центрального променя, зсунута паралельно в напрямку осі X. Вісь третього променя з несучою частотою, зсунутою на величину FY відносно несучої частоти центрального променя, зсунута паралельно в напрямку осі Y. Приймають випромінювання трикомпонентного лазерного пучка, розсіяне сітківкою у зворотному напрямку, вимірюють різницю фаз на частотах FX та FY за допомогою фазочутливого фотоприймача. Зондування та вимірювання різниці фаз виконують з її просторовим розрізненням на сітківці в зоні, що своїми розмірами відповідає розмірам центральної ямки жовтої плями (foveola). За напрямами найбільшого нахилу профілю сітківки знаходять координати центральної - найглибшої - її точки, що дає змогу скоригувати орієнтацію та зміщення оптичної осі вимірювального пристрою так, щоб сигнал похибки був зведений до нуля. Нуль сигналу похибки є стартовим сигналом для рейтрейсингового зондування ока в автоматичному режимі по всій його апертурі з реконструкцію абераційних параметрів ока відносно об'єктивно визначеної зорової осі. UA 114043 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі медичного приладобудування, зокрема до способів та засобів для вимірювання рефракційних похибок з метою діагностики зору та його лікування за цими даними. Вимірювання характеристик оптичної системи ока людини має довгу історію. Однією з перших публікацій була відома книга Христофора Шайнера, в якій автор вперше звернув увагу на неоднорідність рефракційних характеристик людського ока (С. Scheiner, Oculus hoc est: fundamentum opticum in quo ex accurata oculi. Oeniponti, Innsbruck, 1619, глава XIII, С. 111-114). В наші часи широкого застосування в клінічній практиці знайшов датчик Гартмана-Шека для об'єктивних вимірювань спотворень хвильового фронту та рефракційних похибок (J. Liang et al. Objective measurement of wave aberrations of the human eye with the use of a Hartmann-Shack wave-front sensor. Journal of the Optical Society of America, 1994, Vol. 11, No. 7, pp. 1949-1957). В цьому приладі зображення точкової проекції лазерного променя на сітківку формують за допомогою матриці мікролінз, встановлених перед фоточутливою поверхнею матричного фотодетектора. З отриманих даних реконструюють карту хвильового фронту (точніше, карту його спотворення), а також карту рефракційних похибок. Принцип одночасної проекції регулярної структури світла на сітківку був реалізований в аберометрі, описаному P. Mierdel та ін. (Ocular optical aberrometer for clinical use. Journal of Biomedical Optics, 2001, Vol. 6, No. 2, pp. 200-204). Колімований лазерний пучок освітлює маску з регулярною матрицею отворів (непрозорим екраном з отворами), утворюючи систему тонких паралельних пучків діаметром 0,3 мм. За цим екраном встановлена додаткова лінза так, що внутрішньоочна точка фокусування знаходиться на певній відстані перед сітківкою. Завдяки цьому створюється картина світлових плям на сітківці, в якій кожному отворові матриці відповідає своя пляма на сітківці. Картину світлових плям відображає відеокамера. Далі вимірюються відхилення положення плям від своїх ідеальних положень та обчислюються значення аберацій хвильового фронту. Найважливішою перевагою методів одночасного отримання інформації є їх швидкодія, а найвразливішим недоліком є обмеженість динамічного діапазону вимірюваних неоднорідностей рефракції через неможливість ідентифікації належності світлових плям до відповідних координат вхідної зіниці. Цього недоліку немає при вимірюванні довільних аберацій за рейтрейсинговим методом. Рейтресинговий, послідовний в часі, підхід (В.В. Молебний та ін. Вимірювач абераційної рефракції ока. Патент України 46833, Бюлетень № 6, 17.06.2002, та патент США 6932475) базується на поточковій, послідовній у часі, процедурі зондування ока тонким лазерним променем. Приймають лазерне випромінювання, розсіяне сітківкою у зворотному напрямку. За допомогою двохвимірного позиційно-чутливого фотодетектора для кожної вхідної точки на зіниці визначають положення світлової плями, створюваної в площині сітківки лазерним променем. За цими даними реконструюють карту хвильового фронту, карту рефракційних похибок та інші характеристики, похідні від цих параметрів. Важливим моментом при виконанні вимірювань аберацій є коректна прив'язка координат та орієнтації оптичної осі пристрою до зорової осі ока пацієнта. Це особливо важливо для лікування пресбіопії та гіперметропії за допомогою внутрішньорогівкових оптичних елементів інлеїв (intracorneal inlays) з центральною відкритою зоною всього 1,8 мм (P. S. Binder. Intracorneal inlays for the correction of presbyopia and low hyperopia. Ophthalmology Times Europe, Dec. 01, 2015. Див. також http://ophthalmologytimes.modernmedicine.com/ophthalmologytimes/news/intracorneal-inlayscorrection-presbyopia-and-low-hyperopia). Зазвичай координатна прив'язка та орієнтація оптичної осі пристрою відносно зорової осі ока пацієнта виконується з використанням таких ознак, які можуть бути відображені на дисплеї, як то геометричний центр зіниці або лімбуса, або вертекс рогівки, що визначається з використанням рефлексів Пуркіньє (у найпростішому випадку - як центр фігури, що створюється принаймні чотирма віддзеркаленнями від першої поверхні рогівки). Орієнтація зорової осі пацієнта виконується суб'єктивно самим пацієнтом шляхом суміщення двох марок, розташованих на оптичній осі інструменту на різній відстані від ока. Найближчим аналогом є швидкодіючий рейтрейсинговий просторово роздільний рефрактометр, що використовує таку послідовність операцій, описаний патенті України № 104397, Бюлетень № 2, 27.01.2014. Суб'єктивний характер взаємної орієнтації зорової осі ока пацієнта та оптичної осі вимірювального інструменту є джерелом непрогнозованих та некомпенсованих похибок вимірювань, які є недопустимими при вимірюванні абераційних характеристик для корекції зору за допомогою розроблених останнім часом новітніх засобів та оптичних елементів, що потребують прецизійного позиціонування їх в оці, зокрема, в рогівці відносно його зорової осі. 1 UA 114043 C2 5 10 15 20 25 30 35 40 45 50 55 60 Крім того, відсутність ознаки співпадіння зорової та оптичної осей не дозволяє автоматично ініціювати процес вимірювання аберацій. Тому задачею даного винаходу є виключення впливу суб'єктивного фактору на результати вимірювань, що дозволить також автоматизувати процес вимірювання. Нами пропонується спосіб автоматичного рейтрейсингового вимірювання аберацій з об'єктивним визначенням орієнтації зорової осі. За цим методом виконують поточкове, послідовне у часі, зондування ока тонким лазерним променем. Приймають лазерне випромінювання, розсіяне сітківкою у зворотному напрямку. За допомогою двохвимірного позиційно-чутливого фотодетектора для кожної вхідної точки на зіниці визначають положення світлової плями, створюваної в площині сітківки лазерним променем. За цими даними реконструюють карту хвильового фронту, карту рефракційних похибок та інші характеристики, похідні від цих параметрів. Перед початком вимірювань виконують координатну прив'язку вимірювального пристрою відносно вертексу зіниці, що визначається як центр принаймні чотирьох перших рефлексів Пуркіньє. Попередня орієнтація зорової осі виконується пацієнтом суб'єктивно шляхом суміщення двох марок, розташованих на оптичній осі інструменту на різній відстані від ока. Відмінність запропонованого методу полягає в тому, що зондування в центральній зоні зіниці виконуються за допомогою трикомпонентного лазерного пучка паралельних променів, перший з яких є центральним. Вісь другого променя зсунута паралельно в напрямку осі X, з несучою частотою, зсунутою на величину FХ відносно несучої частоти центрального променя, а вісь третього променя зсунута паралельно в напрямку осі Y, з несучою частотою, зсунутою на величину FY відносно несучої частоти центрального променя. В центральній зоні приймають випромінювання трикомпонентного лазерного пучка, розсіяне сітківкою у зворотному напрямку, вимірюють різницю фаз на частотах FX та FY за допомогою фазочутливого фотоприймача, причому зондування та вимірювання різниці фаз виконують з її просторовим розрізненням на сітківці в зоні, що своїми розмірами відповідає розмірам центральної ямки жовтої плями - foveola. Принаймні в двох точках цієї зони визначають напрям найбільшого нахилу профілю сітківки, за якими знаходять координати центральної - найглибшої її точки, вимірюють відхилення координат цієї центральної точки від поточного положення, встановленого попередньою координатною прив'язкою та попередньою суб'єктивною орієнтацією оптичної осі пристрою відносно зорової осі ока, використовують величину відхилення як сигнал похибки орієнтації та зміщення оптичної осі вимірювального пристрою, орієнтують вісь вимірювального пристрою так, щоб сигнал похибки був зведений до нуля, після чого виконують рейтрейсингове зондування по всій апертурі ока в автоматичному режимі, стартовим сигналом для чого є рівність нулю сигналу похибки, а реконструкцію абераційних параметрів ока виконують відносно об'єктивно визначеної зорової осі ока пацієнта. Завдяки запропонованому способу, що дозволяє визначити положення центральної ямки жовтої плями відносно "пошукової" групи зондуючих променів, наділених можливістю визначати напрям найбільшого нахилу в профілі очного дна, стає можливим об'єктивно визначити точку перетину рогівки зоровою віссю й інкорпорувати мініатюрний оптичний елемент (інлей) під Боуманову оболонку рогівки з центром в цій точці. Крім того, завдяки можливості "доорієнтувати" оптичну вісь пристрою та прецизійно позиціонувати її в точку перетину рогівки зоровою віссю при наявності об'єктивного критерію такої орієнтації й такого положення стало можливим автоматично ініціювати процес вимірювання аберацій. Це дає можливість якісного й швидкого виконання вимірювань з високою точністю й мінімізацією суб'єктивних факторів. Перелік фігур креслення Фіг. 1 зображує положення оптичної та зорової (візуальної) осей ока. Фіг. 2 пояснює характер сканування ока в центральній зоні при пошуку положення центральної ямки жовтої плями (foveola). Фіг. 3 ілюструє два етапи корекції осі сканування після знаходження положення центральної ямки жовтої плями: А - зміщення осі сканування; Б - нахил осі сканування. Фіг. 4 представляє функціональну схему пристрою для здійснення способу, що пропонується, яка складається з каналу позиціонування та акомодації 1, каналу зондування 2, першого каналу детектування 3, другого каналу зондування 4, каналу обробки інформації та управління 5, де в канал зондування 2 введено вузол прецизійного позиціонування та орієнтування оптичної осі пристрою 22 з блоком прецизійного управління 23. На фіг. 5 подано два варіанти первинної орієнтації оптичної осі вимірювального пристрою: А - по центру першого рефлексу Пуркіньє; Б - по центру зіниці або по центру лімбуса. 2 UA 114043 C2 5 10 15 20 25 30 35 40 45 50 55 Фіг. 6 представляє профіль центральної фоточутливої зони рогівки: fovea centralis та foveola (центральної ямки жовтої плями). На фіг. 7 представлено топографічне зображення центральної фоточутливої зони рогівки з фронтьєрами та з напрямами найбільшого нахилу. Показано три випадки специфічної орієнтації трикомпонентного лазерного пучка: А - вісь X співпадає з напрямом дотичної до фронтьєри; В напрям найбільшого нахилу складає 45° з осями X та Y в площині цих осей; С - вісь Y співпадає з напрямом дотичної до фронтьєри. Фіг. 8 представляє варіант функціональної схеми детектора кривини профілю очного дна, що базується на квадрантному (чотириелементному) фотодетекторі. Фіг. 9 зображує різниці висот Δhx та Δhу профілю центральної ямки жовтої плями для довільної орієнтації осей X та Y відносно фронтьєри (у випадку Δhx=Δhу напрям максимального нахилу співпадає з бісектрисою кута між осями Х та Y). Фіг. 10 являє специфічний випадок, коли фронтьєра за напрямом співпадає з віссю Y. Фіг. 11 являє специфічний випадок, коли фронтьєра за напрямом співпадає з віссю X. Фіг. 12 являє собою модифікацію функціональної схеми фіг. 4, в яку введено сканування віссю другого каналу детектування 4 при виконанні детектора кривини профілю очного дна 41 у вигляді одноелементного фото детектора. Фіг. 13 наводить відображення інформації пристроєм, що імплементує запропонований спосіб: А - розташування центрів зодуючих променів на вхідній апертурі (в зіниці); Б розташування центроїдів прийнятих сигналів (карта розташування центрів лазерних плям на сітківці); В - карта реконструйованого хвильового фронту; Г - карта реконструйованого розподілу рефракції (карта рефракційних похибок); Д - модуляційна передавальна функція; Е - функція розсіювання точки. Око людини не є симетричною системою обертання, окремі його поверхні мають тороїдальну природу й нахилені одна відносно іншої. Тому око не має "істинної" оптичної осі, яка б відповідала її визначенню як лінії, що з'єднує центри кривизни всіх заломлюючих поверхонь. Оптичну вісь людського ока визначають як лінію, що проходить через віддалений об'єкт і таку точку на рогівці, в якій віддалення центрів рефлексів Пуркіньє від усіх чотирьох заломлюючих поверхонь є найменшим. Таке положення ще називають найкраще узгодженим (best fit) для всіх чотирьох рефлексів (G. Smith, D. Atchison. The eye and visual optical instruments. Cambridge University Press, 1997, p. 293). В практичній же роботі задовольняються віддзеркаленням лише від першої поверхні. Зорову ж (візуальну) вісь визначають як таку, що проходить через центр ямки жовтої плями (foveola), задню вузлову точку, передню вузлову точку й об'єкт фіксації (там же, стор. 293). Як видно з фіг. 1, ці дві осі не співпадають. Кутову відстань між ними визначають як кут κ (каппа), що є різним у різних людей. Він має величину приблизно 5 градусів. Для сучасної практичної офтальмології важливо знати координати зіниці, в яких зорова вісь перетинає зовнішню поверхню рогівки. Це пов'язано з розробкою в останні роки нового методу лікування пресбіопії й гіперметропії, за яким використовуються кільцеві оптичні елементи з внутрішнім діаметром 1,8 мм і менше. Неправильне розташування такого оптичного елемента в тілі рогівки (відхилення його центру від точки перетину рогівки зоровою віссю) мало б катастрофічні наслідки з точки зору якості нової сформованої оптичної системи. Запропоновано метод (J. S. Wakil, et al. Methods for objectively determining the visual axis of the eye and measuring its refraction. US Patent Application 2014/0160438, Publ. 12.06.2014), який не вирішує проблеми знаходження зорової осі та координат перетину нею зовнішньої поверхні рогівки, а лише фіксує напрям, в якому око має мінімальні аберації, що не є зоровою віссю, а головне, у цього методу немає критерію для об'єктивного пошуку як зорової осі, так і координат перетину нею зовнішньої поверхні рогівки. Наскільки нам відомо, ми вперше пропонуємо такий критерій. Аналогічно до заявки US 2014/0160438, пошук починаємо шляхом сканування в центральній зоні (фіг. 2). Термін "сканування" в даному випадку має значення послідовної в часі "перестановки" променя паралельно до самого себе. Як результат цього пошуку, "пеленгуємо" центр ямки жовтої плями, після чого зміщуємо вісь сканування та здійснюємо її нахил до співпадіння з зоровою віссю (фіг. 3). Правильність зміщення та нахилу можуть бути проконтрольовані повторним скануванням в центральній зоні з новим положенням осі сканування. В одному з варіантів пристрою для здійснення винаходу, наведеному на фіг. 4, до складу пристрою входять: канал позиціонування та акомодації 1, канал зондування 2, перший канал детектування 3, другий канал детектування 4, канал обробки інформації та управління 5. Око 6 є об'єктом дослідження. 3 UA 114043 C2 5 10 15 20 25 30 35 40 45 50 55 60 Канал позиціонування та акомодації 1 складається з принаймні чотирьох джерел світла 7, встановлених перед оком 6, світлоподільників 8 та 9, світлофільтра 10, об'єктива 11, відеокамери 12. Крім того, канал позиціонування та акомодації 1 містить в собі ближню марку 13, лінзу 14 управління станом акомодації та віддалену марку 15. Ближня марка 13 підсвічується джерелом світла 16, а віддалена марка 15 - джерелом світла 17. Джерелами світла 7, 16 та 17 можуть бути, наприклад, світловипроміюючі діоди, причому світлодіоди 7 доцільно мати такими, що випромінюють в інфрачервоній ділянці спектру, в якій око не має чутливості, а світлодіоди 16 та 17 випромінюють у видимій ділянці спектру, причому доцільно, щоб вони були різного кольору, наприклад, світлодіод 16 мав би червоний колір, а світлодіод 17 - зелений. Відеокамера 12 спряжена з зіницею ока і використовується для первинної установки пристрою перед оком пацієнта шляхом центрування перших рефлексів Пуркіньє від світлодіодів 7. Орієнтація ока виконується пацієнтом суб'єктивно шляхом суміщення центрів ближньої марки 13 і віддаленої марки 15. Канал зондування 2 складається з лазера 18, вузла сканування 19, колімаційної лінзи 20, дзеркала 21 злому оптичної осі та вузла 22 прецизійного позиціонування та орієнтування оптичної осі пристрою, електромеханічним зв'язком з'єднаного з блоком прецизійного управління 23. До складу вузла 22 входить оптичний елемент 24 управління нахилом лазерних променів та оптичний елемент 25 управління поперечним зміщенням лазерних променів. Оптичний елемент 24 може являти собою двохклиновий дефлектор, кожен клин може обертатися навколо оптичної осі. А оптичний елемент 25 може бути товстою плоскопаралельною пластиною, нахилом якої можна зсувати оптичну вісь променя паралельно до самої себе. Вузол сканування 19 складається з акусто-оптичного кристала 26, що відхиляє промені в напрямку х, перпендикулярному до оптичної осі (х-дефлектор), та акусто-оптичного кристала 27, що відхиляє промені в напрямку у, перпендикулярному до осі х та до оптичної осі (удефлектор). Матеріалом таких кристалів найчастіше вибирають парателурит. Між акустооптичними кристалами 26 і 27 встановлена телескопічна система 28-29 так, щоб здійснювати спряження еквівалентних центрів сканування О26 та О27, тобто передній фокус F28 лінзи 28 співпадає з центром сканування О26, а задній фокус F'29 лінзи 29 співпадає з еквівалентним центром сканування О27 акусто-оптичного кристала 27, який в свою чергу спрягається з переднім фокусом F20 колімаційної лінзи 20. Для виконання умови телескопічності передній фокус лінзи 29 суміщено з заднім фокусом лінзи 28. Відхилення променів акусто-оптичними кристалами 26 та 27 управляється відповідними драйверами: драйером 30 х-дефлектора та драйвером 31 y-дефлектора. Ці драйвери є по суті синтезаторами частоти, що подається на кристали 26 та 27. Кут відхилення променя залежить від частоти, поданої на електроди кристала. Частоти мають порядок 70-90 МГц. Для отримання лазерного пучка, що складається з двох паралельних компонент кожен кристал додатково збуджується частотою зсуву за допомогою драйвера зсуву 32 по осі х на частоту FX та за допомогою драйвера зсуву 33 по осі у на частоту FY. В результаті на виході вузла сканування 19 отримуємо трикомпонентний лазерний промінь, що має центральну компоненту на несучій частоті f0 та дві паралельні їй компоненти, одна з яких, просторово зсунута в напрямку осі х, відрізняється несучою частотою на величину FX, тобто має несучу частоту f0+FX (при умові, що просторовий фільтр селектує плюс перший порядок дифракції), а друга компонента, просторово зсунута в напрямку осі у, відрізняється несучою частотою на величину FY, тобто має несучу частоту f0+FY (теж при умові, що просторовий фільтр селектує плюс перший порядок дифракції). Частотний зсув вибирають таким, щоб просторово всі три компоненти перекривались, наприклад, не менше ніж на 50 %, що відповідає частотам зсуву, меншим 1 МГц. Для спрощення опису технічні деталі селекції окремих порядків дифракції за допомогою просторових фільтрів не показані, оскільки вони не відносяться до особливостей даного винаходу. Перший канал детектування 3 складається з послідовно встановлених компонентів: поляризаційного фільтра 34, апертурної діафрагми 35, об'єктива 36 та позиційно чутливого детектора 37. Позиційно чутливий детектор 37 може бути виконаний у вигляді двохвимірної CCD або CMOS структури, причому для детектора 37 не обов'язково мати попіксельний доступ для наступної обробки інформації з виходу детектора. Одним з варіантів виконання цього детектора є використання двох світлочутливих лінійок (див., наприклад, http://www.hamamatsu.com/jp/en/product/alpha/C/4119/index.html). Лінійки орієнтують ортогонально одна до одної в площині зображення об'єктива 36. Розділення зображення для проектування на кожну з лінійок теж не є предметом обговорення в рамках задач запропонованого методу. 4 UA 114043 C2 5 10 15 20 25 30 35 40 45 50 55 60 Другий канал детектування 4 має подібну структуру, але з виконанням інших функцій. Він складається з послідовно встановлених компонентів: поляризаційного фільтра 38, апертурної діафрагми 39, об'єктива 40 та детектора кривини профілю очного дна 41. У найпростішому випадку структурно детектор 41 може складатися з фоточутливого елемента, з виходу якого знімають сигнали різницевих частот FX та FY, і фазового детектора, на який подають ці сигнали та референтні сигнали частот FX та FY (з драйвера 32 зсуву на FX та з драйвера 33 зсуву на FY). Така ж структура може бути виконана у вигляді єдиної інтегральної схеми, тоді це буде "фокальна структура" (focal plane array). Кількість елементів може бути такою, щоб відтворити двовимірний розподіл фазових співвідношень. У найпростішій формі - це матриця щонайменше 2×2, яку створює чотириелементний (квадрантний) детектор. Структура детектора 41 кривини профілю очного дна, що базується на такій матриці, наведена на фіг. 8, яка буде детально описана нижче. Число елементів може бути і значно більшим, це дозволятиме відображати складніші фазові профілі й віднаходити центр такої структури з більшою точністю. Канал 5 обробки інформації та управління складається з блока управління 42, блока обробки інформації 43 та дисплея 44. В блок 43 інформація надходить з відеокамери 12, з детекторів 37 та 41. Вироблена блоком 43 інформація подається на блок управління 42, який подає команди на джерела світла 7, 16 та 17, на драйвери 31, 32, 33, 34 та на блок прецизійного управління 23. Дисплей 44, з'єднаний з блоками 42 та 43, відображає етапи виконання команд блоку управління та результати аберометричних обчислень блоком 43 обробки інформації. Функціонує приведений на фіг. 4 пристрій наступним чином. За командою з блока управління 42 включаються джерела світла (світлодіоди) 7, 16 та 17. Пацієнт орієнтує досліджуване око так, щоб були суміщені центри марок 13 та 15, підсвічуваних світлодіодами 16 та 17 відповідно. Оператор (лікар, оптометрист), спостерігаючи на дисплеї 44 зображення з відеокамери 12, суміщає перехрестя (оптичну вісь пристрою) з центром групи перших рефлексів Пуркіньє, створюваних джерелами світла 7 (фіг. 5А), який може також бути ідентифікований по своєму зображенню, наприклад, у вигляді кільця або іншого типу перехрестя (для спрощення на рисунку не подано). Цих джерел може бути чотири або більше. Примітимо, що використання лише перших рефлексів Пуркіньє є ще одним із спрощень процедури, оскільки в кінцевому результаті все рівно потрібно буде вносити уточнення в положення точки перетину рогівки зоровою віссю. Як варіант попереднього орієнтування може використовуватись також геометричний центр зіниці або лімбуса (фіг. 5Б). Вибір того чи іншого типу попереднього орієнтування не є специфічним для даного винаходу і наводиться лише в порядку прикладу. Однією з підготовчих операцій є також приведення акомодаційної функції ока до стану, в якому потрібно отримати інформацію про абераційні характеристики ока. Цю операцію виконують з допомогою лінзи 14, яку можна переміщати уздовж оптичної осі пристрою. Найчастіше вимірювання виконують при розслабленій акомодації. Операції отримання необхідного стану акомодації також не є особливістю даного винаходу, але потрібно мати на увазі, що ці операції можуть виконуватись як при попередньому орієнтуванні ока, так і після його завершення - перед початком основного етапу вимірювань. По завершенні попереднього ("суб'єктивного") орієнтування ока пацієнта за командою блоку управління 42 включається лазер 18 та вузол сканування 19. При цьому безперервно працюють драйвери зсуву 32 та 33. Що стосується драйверів х тау дефлекторів 30 та 31, то вони на цьому етапі функціонують тільки в центральній зоні в режимі пошуку зорової осі. Вузол 22 автоматичного прецизійного позиціонування та орієнтування оптичної осі пристрою (у подальшому скорочено - вузол 22) знаходиться у нульовому положенні за командою блоку прецизійного управління 23. Як варіант, частоти драйверів 30 та 31 можна виставити так, щоб дефлектори 26 та 27 тримали "нульову" орієнтацію центрального променя, а сканування (зміщення паралельно самих до себе) здійснювалось оптичним елементом 25. Такий варіант може мати переваги з огляду на те, що в цьому випадку сканування буде неперервним, тобто без пропуску окремих точок на траєкторій сканування. Для подальшого розгляду роботи з пристроєм приймемо до уваги, що багатошарова сітківка з найбільшим скупчення фоточутливих клітин в центрі (фіг. 6), саме в центрі має заглиблення. Зона fovea centralis має розмір 1,5 мм в поперечнику, а сама ямка жовтої плями (foveola) є ще меншою (всього 0,35 мм). Розглядаючи в плані топографію ямки (фіг. 7), виділимо на ній лінії однакового рівня (фронтьєри), ортогонально до яких орієнтовані напрями найбільшого (максимального) нахилу. Сканування можна здійснювати по довільній траєкторії. Для визначеності нами зображена кільцева траєкторія. В процесі сканування по замкнутій траєкторії принаймні в чотирьох точках траєкторії матиме місце ситуація специфічна тим, що дотична до фронтьєри буде паралельна осі X або осі Y. Крім 5 UA 114043 C2 5 10 15 20 25 30 35 того, принаймні в чотирьох точках траєкторії осі X та Y будуть орієнтовані так, що напрям найбільшого нахилу співпадатиме з бісектрисою кута між осями X та Y. Один з варіантів обробки інформації для визначення координат центру ямки жовтої плями подано на фіг. 8. Як згадувалось вище, фоточутлива частина детектора в цьому варіанті складається з чотирьох елементів: Д1, Д2, Д3 та Д4. На виході кожного з цих елементів встановлено по два фільтри, що виділяють частоти FX та FY. Першу групу фільтрів складають фільтри частоти FX: Фx1, Фx2, Фx3 та Фx4. Другу групу фільтрів складають фільтри частоти Fy: Фy1, Фy2, Фy3 та Фy4. Вихід кожного з фільтрів приєднано до сигнального входу відповідного фазового детектора. Так, в першій групі фільтрів мають місце такі з'єднання: вихід Ф x1 приєднано до сигнального входу фазового детектора ФДx1 вихід Фx2 - до ФДx2, вихід Фx3 - до ФДx3, вихід Фx4 - до ФДx4. Аналогічні з'єднання виконано в другій групі фільтрів: вихід Ф y1 приєднано до сигнального входу фазового детектора ФДy1, вихід Фy2 - до ФДу2, вихід Фy3 - до ФДу3, вихід Фy4 - до ФДy4. На входи опорних (референтних) сигналів фазових детекторів першої групи (ФД x1, ФДx2, ФДx3 та ФДx4) подається референтний сигнал з драйвера зсуву на FX, на входи ж референтних сигналів фазових детекторів другої групи (ФДy1, ФДy1, ФДy3 та ФДy4) подається референтний сигнал з драйвера зсуву на FY. На виходах фазових детекторів першої групи формуються сигнали амплітудою, що відповідає фазовим зсувам між центральним пучком з несучою частотою f 0 та з паралельним боковим пучком частотою f0+FX: на виході фазового детектора ФДx1 - це сигнал амплітудою φх1, на виході ФДx2 - амплітудою φх2, на виході ФДx3 - амплітудою φx3, на виході ФДx4 - амплітудою φx4. На виходах фазових детекторів другої групи формуються сигнали амплітудою, що відповідає фазовим зсувам між центральним пучком з несучою частотою f 0 та з паралельним боковим пучком частотою f0+FY: на виході фазового детектора ФДy1 - це сигнал амплітудою φу1, на виході ФДу2 - амплітудою φу2, на виході ФДy3 – амплітудою φy3, на виході ФДy4 - амплітудою φу4. Вихідні сигнали амплітудою φх1, φх2, φх3, φx4, φy1, φy2, φу3, φy4 з усіх чотирьох фазових детекторів подаються на вхід блока обробки інформації 41. Спершу обчислюється різниця Δh в висоті між кожною парою променів "центральний - боковий", тобто f0 та f0+FX і f0 та f0+FY (фіг. 9). На цьому рисунку всі три компоненти пучка є паралельними один до одного та до осі Z, причому центральний пучок має несучу частоту f 0, він перетинає очне дно в точці B0. Промінь з несучою частотою f0+FX лежить в площині осей XZ і перетинає очне дно в точці Вх, а промінь з несучою частотою f0+FY, що лежить в площині осей YZ, перетинає очне дно в точці By. Для i-ї пари пучків з різницею частоти FX: 2nc . (1) hxi xi 2f0 FX Для j-ї пари пучків з різницею частоти FY: y j 2m c . (2) hy j 2f0 FY Тут i=1, 2, 3, 4; j=1, 2, 3, 4; n та m визначають неоднозначність в 2π при вимірюванні різниці фаз, с є швидкість світла в середовищі ока. Кут нахилу θх поверхні очного дна в зоні зондування в площині променів з несучими частотами f0 та f0+FX: xi 2nc , (3) xi arctg 2aFX f0 FX де а є сталою, що враховує параметри акусто-оптичного кристала та параметри поширення променів. Кут нахилу θу поверхні очного дна в зоні зондування в площині променів з несучими частотами f0 та f0+FY: y ji 2m c . (4) y j arctg 2aFY f0 FY Проекція лінії найбільшого нахилу поверхні очного дна на площину, перпендикулярну до зондуючих променів, визначає напрямок на найнижчу точку профілю очного дна для даної точки (зони) на очному дні. Орієнтацію цієї проекції можна однозначно описати кутом α між нею і віссю X в площині проекції, тобто в площині, перпендикулярній до зондуючих променів. 40 45 50 6 UA 114043 C2 В загальному вигляді задача полягає в тому, щоб у площині, яка задана координатами трьох точок: Px, y, z 0, 0, 0, aFX, 0, hx , 0, aFY , hy , знайти кут α в площині, перпендикулярній зондуючому променю, що відповідає напряму найбільшого нахилу площини Px, y, z , тобто максимальному градієнтові: 5 10 15 1 0 grad Px, y, z 1 0 1 aFY 0 0 1 0 0 0 1 hx i aFx 1 hx j aFX 0 1 k . (5) hy 0 1 hy 0 aFY 1 В площині проекції достатньо приймати до уваги тільки перші два члени правої сторони виразу (5). Кут α дорівнює 45° при θxi=θyj для i=j. При θхi=0 напрямок на найнижчу точку профілю очного дна співпадає з віссю Y, а при θyj=0 напрямок на найнижчу точку профілю очного дна співпадає з віссю X. Ці умови виконувались би, якби FX=FY і протяжність шляхів для променів з несучими m m . частотами f0+FX та f0+FY була однаковою, тобто f0 FY f0 FX Оскільки виконати ці умови для довільного позиціонування променів на очному дні практично неможливо, нами пропонується скористатися можливістю допущення, що в сусідніх елементах детектора Д1, Д2, Д3 чи Д4 величини n та m можна вважати однаковими для всіх елементів детектора. Тоді: xi arctgK xxi , де K x c2aFX f0 FX 1 , (6) y j arctg K yy j , де K y c2aFY f0 FY 1 . (7) 20 Зважаючи на те, що f0>>Fy тa f0>>Fx, можна записати: K y K x FX K xrxy , де rxy FX . FY FY На блок обробки інформації 41 покладаємо такі обчислення на етапі пошуку центру ямки жовтої плями: x2 x3 x4 , (8) x x1 x1 x2 x3 x4 y1 y 4 y 2 y3 . (9) y y1 y 2 y3 y 4 25 30 35 40 В блоці 41 виконується порівняння величин Δθх та Δθу. Для ситуації Δθх=Δθу кут α=45 (135)°, при Δhx=0 і Δθх=0 кут α=90 (270)° (фіг. 10), а при Δhy=0 і Δθу=0 кут α=0 (180)° (фіг. 11). Блок 41 запам'ятовує (х, у) координати пучків для цих трьох випадків і розв'язує задачу визначення координат центру ямки жовтої плями. Якщо обмежитись пошуком напрямків на центр ямки жовтої плями лише для фіксованих значень кута αф=0 (180)°, 45 (135)°, 90 (270)°, то вирази (8), (9) для знаходження αф можна ще більше спростити: x2 x3 x4 , (10) x x1 x1 x2 x3 x4 y1 y 4 y 2 y3 . (11) y y1 y 2 y3 y 4 При цьому, якщо Δφх=rхуΔφу, то кут αф=45 (135)°, якщо ж Δφх=0, то кут αф=90 (270)°, а при Δφy=0 кут αф=0 (180)°. Визначивши координати входження центрального променя в площині зіниці, при яких кут αф=0 (180)°, 45 (135)°, 90 (270)°, обчислюють положення і орієнтацію центрального променя, при яких ці значення кута αф будуть мати ортогональне розташування на кільцевій траєкторії сканування, тобто центр ямки жовтої плями співпаде з центром кільцевої траєкторії сканування. Для здійснення переорієнтації та зміщення лазерних пучків за командою з блоку управління 42 каналу 5 обробки інформації та управління вузол 22 прецизійного позиціонування та орієнтування оптичної осі пристрою, керований блоком 23 прецизійного управління, здійснює поворот клинів оптичного елемента 24 управління нахилом лазерних променів так, щоб виконати необхідний нахил лазерних променів (фіг. 3А), а також здійснює нахил оптичного елемента 25 управління поперечним зміщенням лазерних променів так, щоб центральний промінь перетинав зіницю в точці її перетину зоровою віссю (фіг. 3Б). 7 UA 114043 C2 5 10 15 20 25 30 35 40 Як згадувалося вище, сканування в центральній зоні може виконуватись як за допомогою вузла сканування 19 з позиціонуванням пучків в дискретних точках траєкторії, так і в неперервному режимі за допомогою вузла 22. Як варіант, детектор 41 кривини профілю очного дна може бути одноелементним, тоді інформацію з суміжних елементів очного дна можна отримувати послідовно у часі, для чого перед другим каналом детектування 4 встановлюється скануючий вузол 47 з драйвером 48, з'єднаним з блоком управління 42 (фіг. 12). Решта елементів схеми тут та ж, що й на схемі фіг. 4. При скануванні інформацію з сусідніх елементів зображення (пікселів) достатньо буде вибирати тільки з чотирьох точок зон на очному дні, еквівалентних зонам, зображення яких відповідає положенню на детекторах Д1, Д2, Д3 і Д4 в схемі фіг. 8. Можливі два варіанти у співвідношенні між розмірами сукупної лазерної плями (суми трьох пучків) та розмірами елемента зображення, що обробляється детектором кривини профілю очного дна 41. У випадку, коли лазерна пляма більша (приблизно в два рази в діаметрі), використовують квадрантний детектор, як показано на фіг. 8. В цьому випадку можливо також і застосування одноелементного фотодетектора зі скануванням як описано в попередньому параграфі. У випадку ж, коли їх розміри однакові, потрібно синхронне сканування як оптичним елементом 25, так і скануючим вузлом 47. Після закінчення процесу визначення положення точки перетину рогівки зоровою віссю, координати цієї точки заносяться в пам'ять блоку обробки інформації 43 й використовуються як для вимірювання аберацій і інших оптичних параметрів, так і для подальшого лікування зору пацієнта. Вимірювання аберацій виконується методом рейтрейсингу з послідовним у часі зондуванням ока за заданими координатами вхідної зіниці (фіг. 13А). Ця операція стартує автоматично, як тільки з блока обробки інформації 43 надійде сигнал про закінчення операцій переорієнтації та зміщення осі сканування в положення, що співпадає з зоровою віссю ока пацієнта. Управління положенням лазерного променя здійснюється за допомогою вузла сканування 19: по осі X - акусто-оптичним дефлектором 26, яким управляє драйвер 30 хдефлектора, та по осі Y - акусто-оптичним дефлектором 27, яким управляє драйвер 31 удефлектора. Драйвери 32 та 33 в цьому режимі виключають, тобто лазерний пучок не розщеплюють на компоненти. Прийом сигналів виконується за допомогою першого каналу детектування 3. Позиційно чутливий детектор 37 визначає координати лазерних проекцій на очному дні (приклад наведено на фіг. 13Б). Координати входження променів в око через блок управління 42 задаються блоком обробки інформації 43 й зберігаються в ньому, де за цими даними та за координатами лазерних проекцій на очному дні реконструюють каргу хвильового фронту (фіг. 13В) та карту розподілу рефракції (фіг. 13Г). Обчислюються також інші параметри, наприклад, модуляційна передавальна функція (фіг. 13Д) та функція розсіювання точки (фіг. 13Е). Наведені приклади здійснення запропонованого способу не обмежуються застосуванням його тільки в рейтрейсингових вимірювачах аберацій. Об'єктивне визначення зорової осі може використовуватись також в вимірювачах аберацій, що базуються і на інших принципах. ФОРМУЛА ВИНАХОДУ 45 50 55 60 Спосіб автоматичного рейтрейсингового вимірювання аберацій з об'єктивним визначенням орієнтації зорової осі, за яким виконують поточкове, послідовне у часі, зондування ока тонким лазерним променем, приймають лазерне випромінювання, розсіяне сітківкою у зворотному напрямку, за допомогою двовимірного позиційно-чутливого фотодетектора для кожної вхідної точки на зіниці визначають положення світлової плями, створюваної в площині сітківки лазерним променем, за цими даними реконструюють карту хвильового фронту, карту рефракційних похибок та інші характеристики, похідні від цих параметрів, причому перед початком вимірювань виконують координатну прив'язку вимірювального пристрою відносно вертексу зіниці, що визначається як центр принаймні чотирьох перших рефлексів Пуркіньє, а попередня орієнтація зорової осі виконується пацієнтом суб'єктивно шляхом суміщення двох марок, розташованих на оптичній осі інструмента на різній відстані від ока, який відрізняється тим, що зондування в центральній зоні зіниці виконують за допомогою трикомпонентного лазерного пучка паралельних променів, перший з яких є центральним, вісь другого променя зсунута в напрямку осі X, з несучою частотою, зсунутою на величину FX відносно несучої частоти центрального променя, а вісь третього променя зсунута паралельно в напрямку осі Y, з несучою частотою, зсунутою на величину FY відносно несучої частоти центрального променя, приймають випромінювання трикомпонентного лазерного пучка, розсіяне сітківкою у зворотному 8 UA 114043 C2 5 10 напрямку, вимірюють різницю фаз на частотах FX та FY за допомогою фазочутливого фотоприймача, причому зондування та вимірювання різниці фаз виконують з її просторовим розрізненням на сітківці в зоні, що своїми розмірами відповідає розмірам центральної ямки жовтої плями (foveola), принаймні в двох точках цієї зони визначають напрям найбільшого нахилу профілю сітківки, за якими знаходять координати центральної - найглибшої - її точки, вимірюють відхилення координат цієї центральної точки від поточного положення, встановленого попередньою координатною прив'язкою та попередньою суб'єктивною орієнтацією оптичної осі пристрою відносно зорової осі ока, використовують величину відхилення як сигнал похибки орієнтації та зміщення оптичної осі вимірювального пристрою, орієнтують та зміщують вісь вимірювального пристрою так, щоб сигнал похибки був зведений до нуля, після чого виконують рейтрейсингове зондування по всій апертурі ока в автоматичному режимі, стартовим сигналом для чого є рівність нулю сигналу похибки, а реконструкцію абераційних параметрів ока виконують відносно об'єктивно визначеної зорової осі ока пацієнта. 9 UA 114043 C2 10 UA 114043 C2 11 UA 114043 C2 12 UA 114043 C2 13 UA 114043 C2 14 UA 114043 C2 15 UA 114043 C2 Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 16
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A61B 3/10, A61B 3/103, G01N 21/01
Мітки: вимірювання, рейтрейсингового, визначенням, зорової, автоматичного, об'єктивним, орієнтації, спосіб, аберацій, осі
Код посилання
<a href="https://ua.patents.su/18-114043-sposib-avtomatichnogo-rejjtrejjsingovogo-vimiryuvannya-aberacijj-z-obehktivnim-viznachennyam-oriehntaci-zorovo-osi.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного рейтрейсингового вимірювання аберацій з об’єктивним визначенням орієнтації зорової осі</a>
Спосіб автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні
Номер патенту: 104443
Опубліковано: 10.02.2014
Автори: Хомушко Дмитро Валерійович, Бурачек Всеволод Германович
МПК: G01C 15/00
Мітки: приладів, спосіб, вертикальних, візирної, горизонтальних, зміщень, осі, автоматичного, перефокусуванні, геодезичних, трубі, контролю, зорової
Формула / Реферат:
Спосіб автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні, заснований на спостереженні і фіксуванні зміни взаємного просторового положення зображень індексів, які визначають оптичні осі, контролюючого і контрольованого приладів в єдиній системі світлових променів, що несуть зображення індексів, який відрізняється тим, що оптико-електронно контролюють фокусування...
Пристрій для автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні
Номер патенту: 104444
Опубліковано: 10.02.2014
Автори: Хомушко Дмитро Валерійович, Бурачек Всеволод Германович
МПК: G01C 15/00
Мітки: геодезичних, візирної, зорової, горизонтальних, зміщень, приладів, перефокусуванні, вертикальних, автоматичного, трубі, осі, контролю, пристрій
Формула / Реферат:
Пристрій для автоматичного контролю горизонтальних та вертикальних зміщень візирної осі зорової труби геодезичних приладів при перефокусуванні, що містить основу та встановлений на ній коліматор, який відрізняється тим, що коліматор обладнаний плоскопаралельною пластиною з напівпрозорим дзеркалом, фотоприймальною матрицею, трипельпризмою з механізмом переміщення її за напрямом оптичної осі коліматора, жорстко закріпленим на основі дзеркалом,...
Спосіб вимірювання хвильових аберацій ока
Номер патенту: 67870
Опубліковано: 15.07.2004
Автори: Ластер Ламар Фредерік, мол., Молебний Сергій Васильович, Молебний Василь Васильович
МПК: A61B 3/10, A61B 3/14, A61B 3/00
Мітки: хвильових, вимірювання, ока, аберацій, спосіб
Формула / Реферат:
1. Спосіб вимірювання хвильових аберацій ока, заснований на зондуванні ока вузько спрямованим пучком лазерного випромінювання, прийомі розсіяного сітківкою випромінювання, вимірюванні нахилу хвильового фронту у вигляді перших частинних похідних по координатах у дискретному наборі точок зіниці з відомими координатами, апроксимації хвильового фронту за цими даними у вигляді функцій від координат зіниці та обчисленні хвильових аберацій ока як...
Пристрій для вимірювання аберацій хвильового фронту
Номер патенту: 104398
Опубліковано: 27.01.2014
Автори: Сокуренко Вячеслав Михайлович, Молебний Василь Васильович
МПК: G01N 21/00, A61B 3/10, A61F 9/00, A61B 3/103
Мітки: аберацій, фронту, хвильового, вимірювання, пристрій
Формула / Реферат:
Пристрій для вимірювання аберацій хвильового фронту, що має канал позиціонування і акомодації, канал зондування, приймальний канал та канал управління і обробки інформації, причому канал позиціонування і акомодації складається з світлоподільника, об'єктива, відеокамери, ближньої марки, лінзи, рухомої уздовж оптичної осі, віддаленої марки та джерел світла для освітлення ближньої марки, віддаленої марки та ока, канал зондування складається з...
Спосіб вимірювання хвильових аберацій ока та пристрій для його здійснення (варіанти)
Номер патенту: 59488
Опубліковано: 15.09.2003
Автор: Молебний Василь Васильович
МПК: A61B 3/00, A61B 3/14, A61B 3/10
Мітки: аберацій, вимірювання, хвильових, пристрій, здійснення, ока, варіанти, спосіб
Формула / Реферат:
1. Спосіб вимірювання хвильових аберацій ока, оснований на зондуванні ока вузьким пучком лазерного випромінювання, виділенні розсіяної сітківкою компоненти з випромінювання, що повертається з ока, розділенні її на субапертури за допомогою матриці співвісних лінз, вимірюванні нахилу хвильового фронту в кожній субапертурі шляхом визначення відхилення положення фокальної плями від оптичної осі лінзи, реконструкції хвильового фронту за виміряними...
Попередній патент: Спосіб одержання каталізатора окиснення амоніаку в нітрогену (і) оксид
Наступний патент: Сталевий лист з високими механічними властивостями, як-то механічна міцність і пластичність, спосіб виготовлення такого листа та його застосування
Випадковий патент: Паста гарбузова