Орнітоптер
Номер патенту: 26735
Опубліковано: 12.11.1999
Автори: П'ятишев Роберт Олександрович, П'ятишев Олексій Робертович
Формула / Реферат
Орнитоптер, содержащий крыло, включающее центральную и машущие секции, привесы с шарнирами, двигатель, корпус, механизм преобразования вращательного движения в колебательное и механизм возврата машущих секций в горизонтальное положение, при этом центральная секция отделена от корпуса и связана с машущими секциями плечом, обспечивающим равновесие сил подъема на центральной и машущих секциях в горизонтальном положении, отличающийся тем, что орнитоптер снабжен механизмом изменения и фиксатора угла атаки центральной секции и механизмом плавного изменения амплитуды колебаний, несущие поверхности машущих секций размещены выше осей привеса на величину равную 0,1 - 0,3 длины машущих секций и в совокупности с центральной секцией преобразованы в маятник, в качестве механизма для преобразования вращательного движения в колебательное использован кулисный или кулачковый механизм, а механизм возврата машущих секций в горизонтальное положение выполнен с возможностью аккумулирования энергии и обладает свойствами энергетического маятника.
Текст
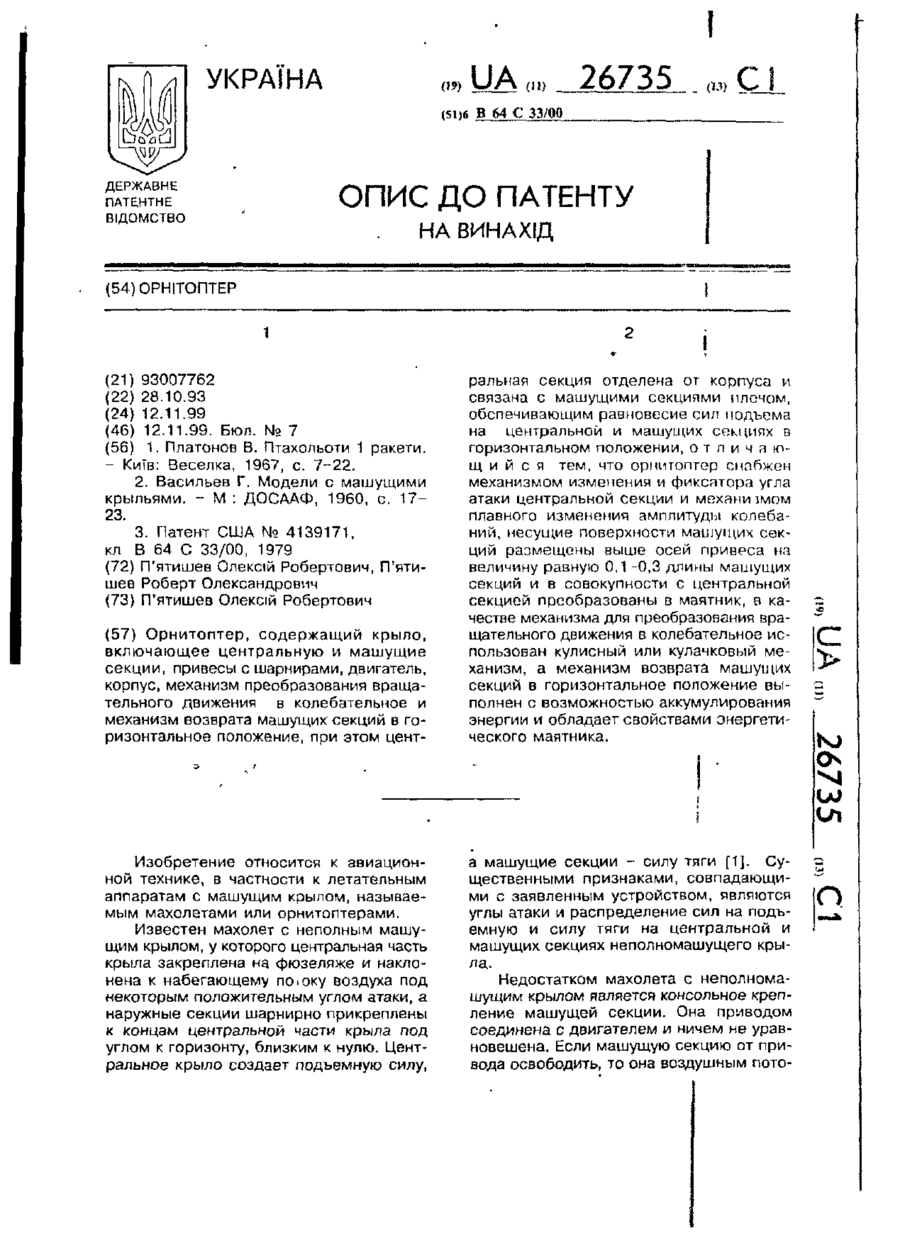
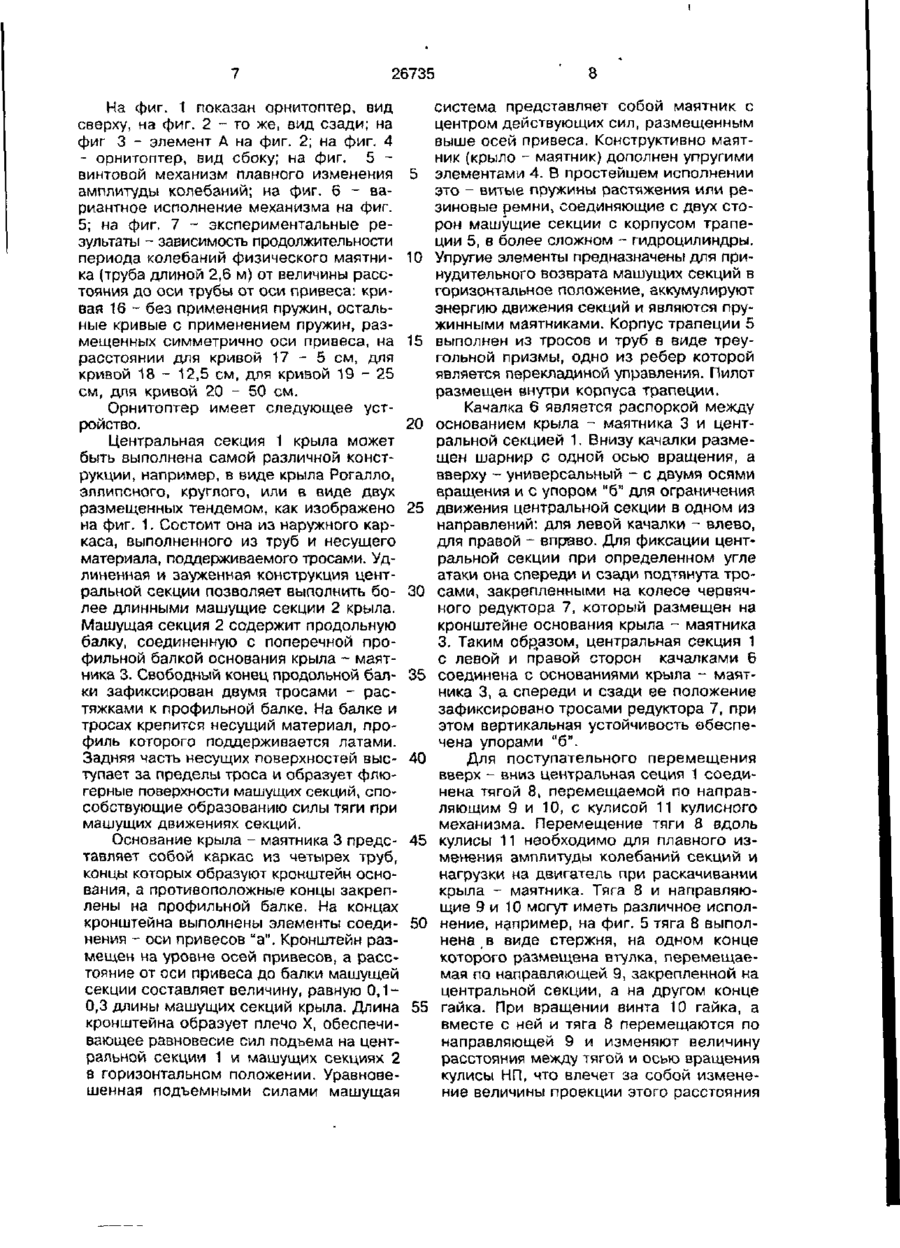
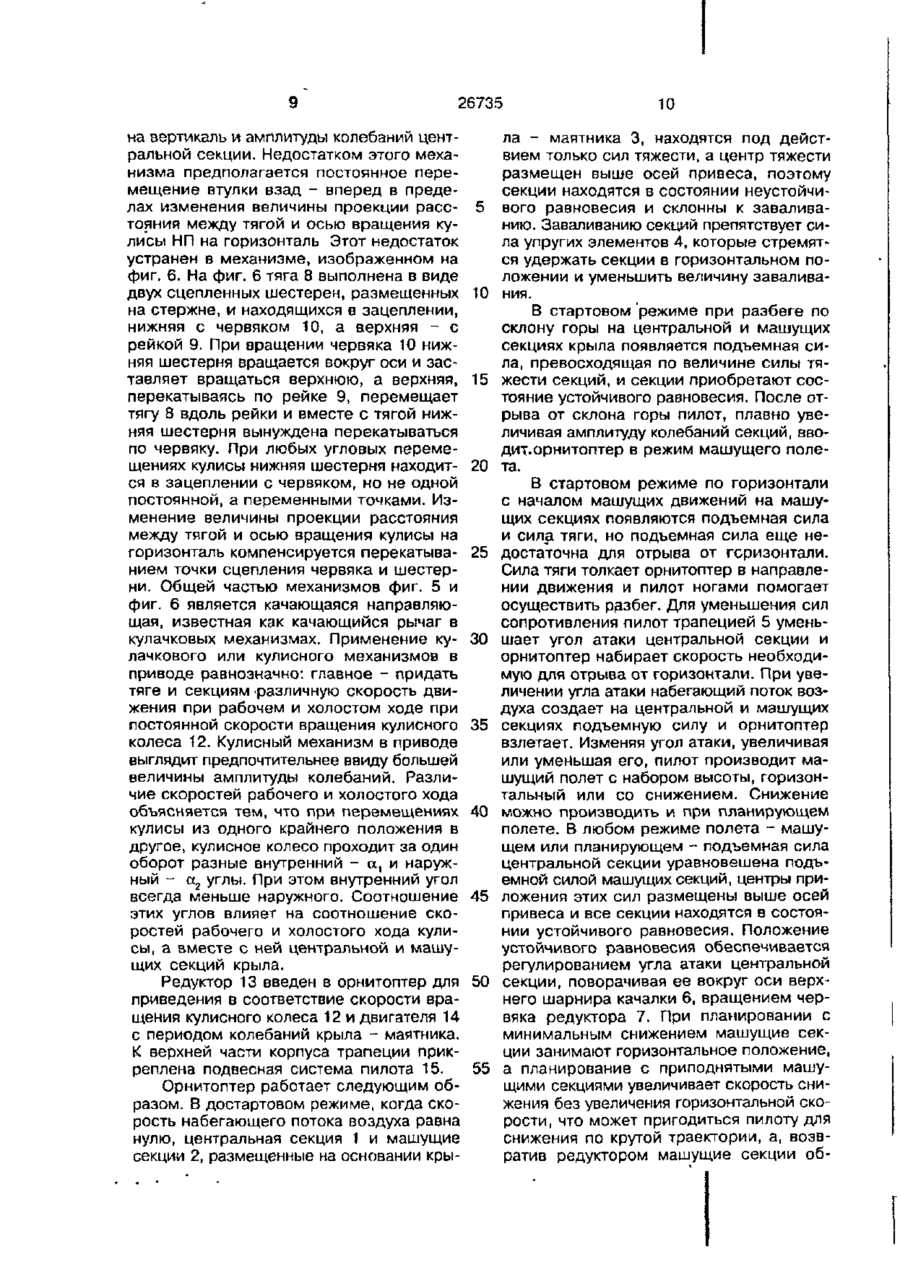
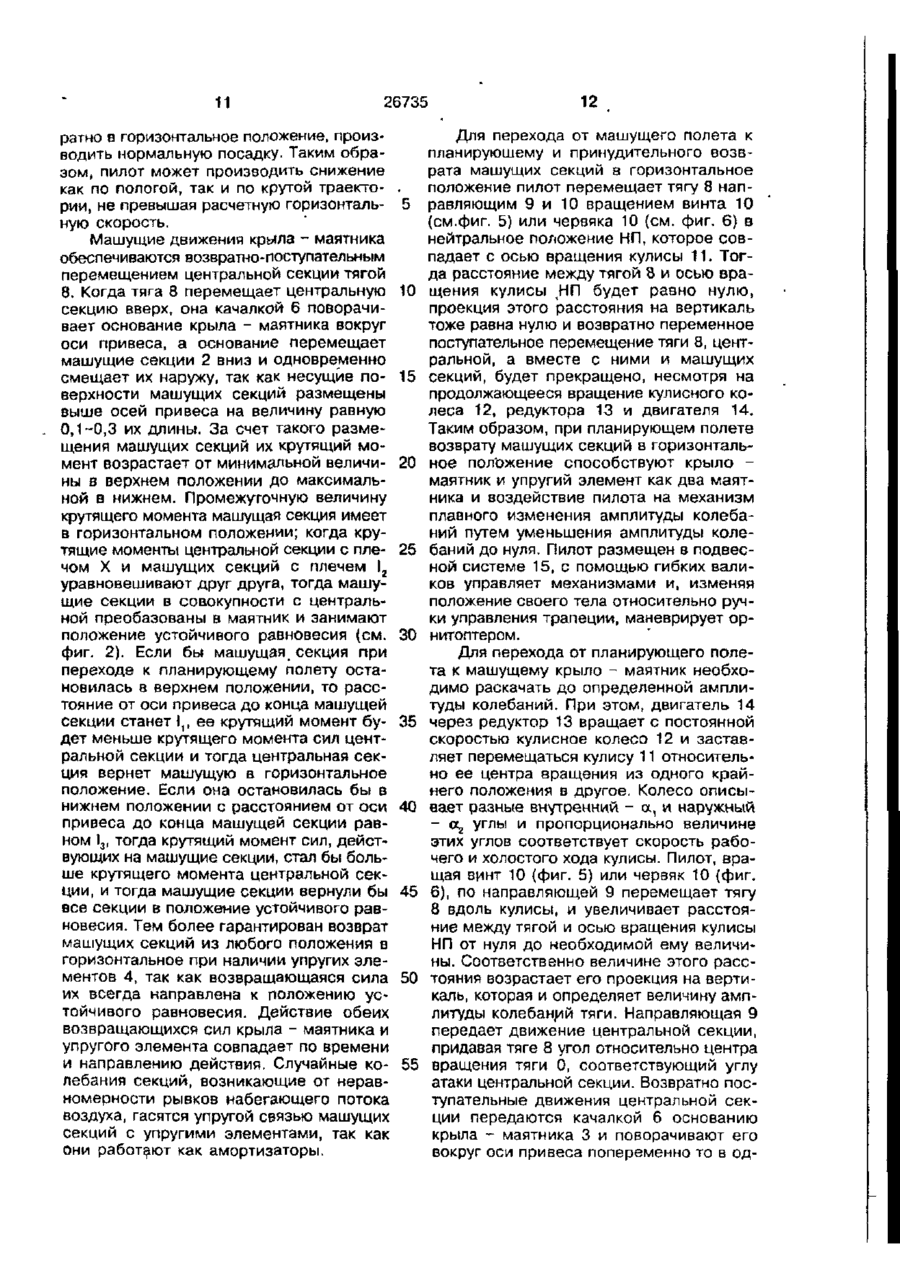
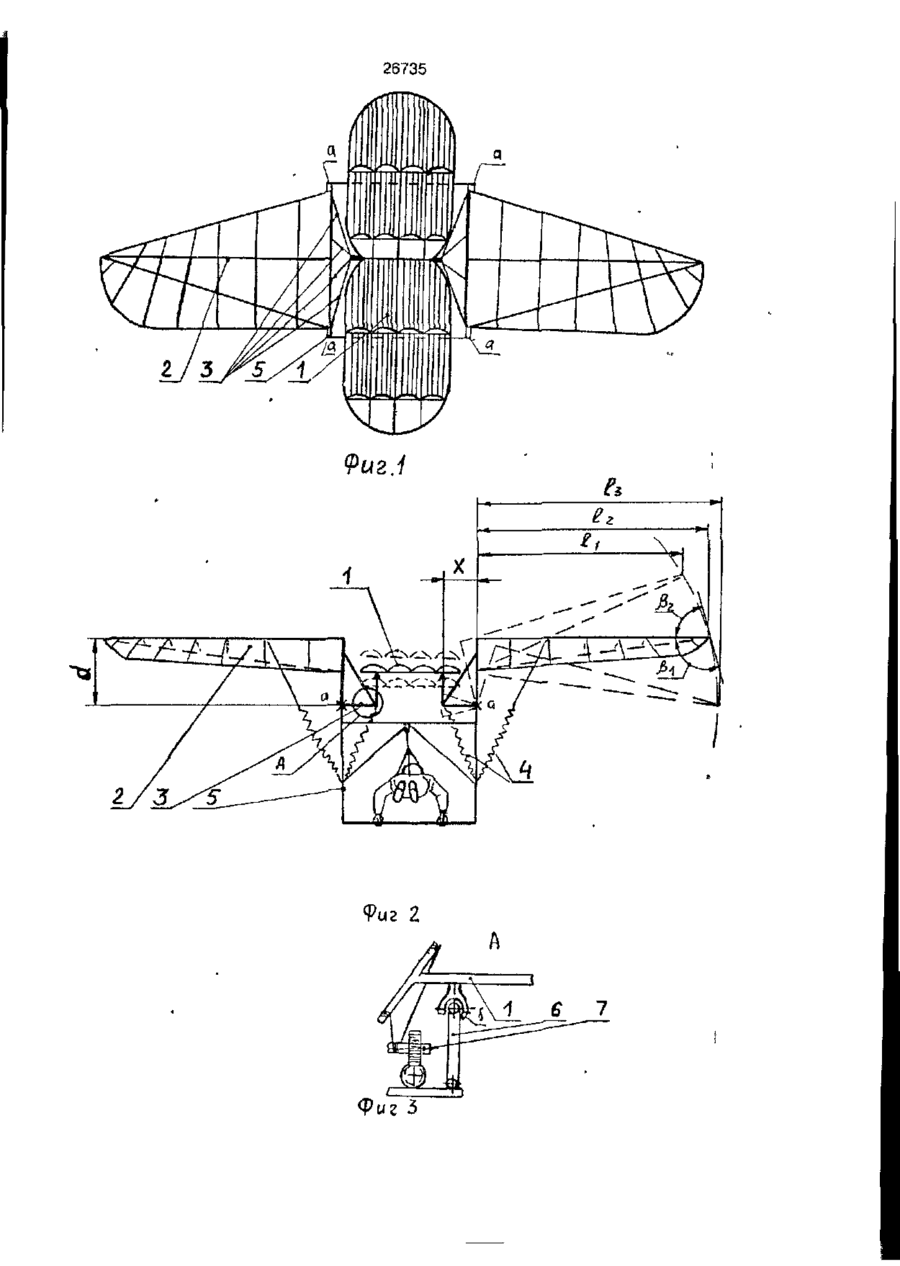
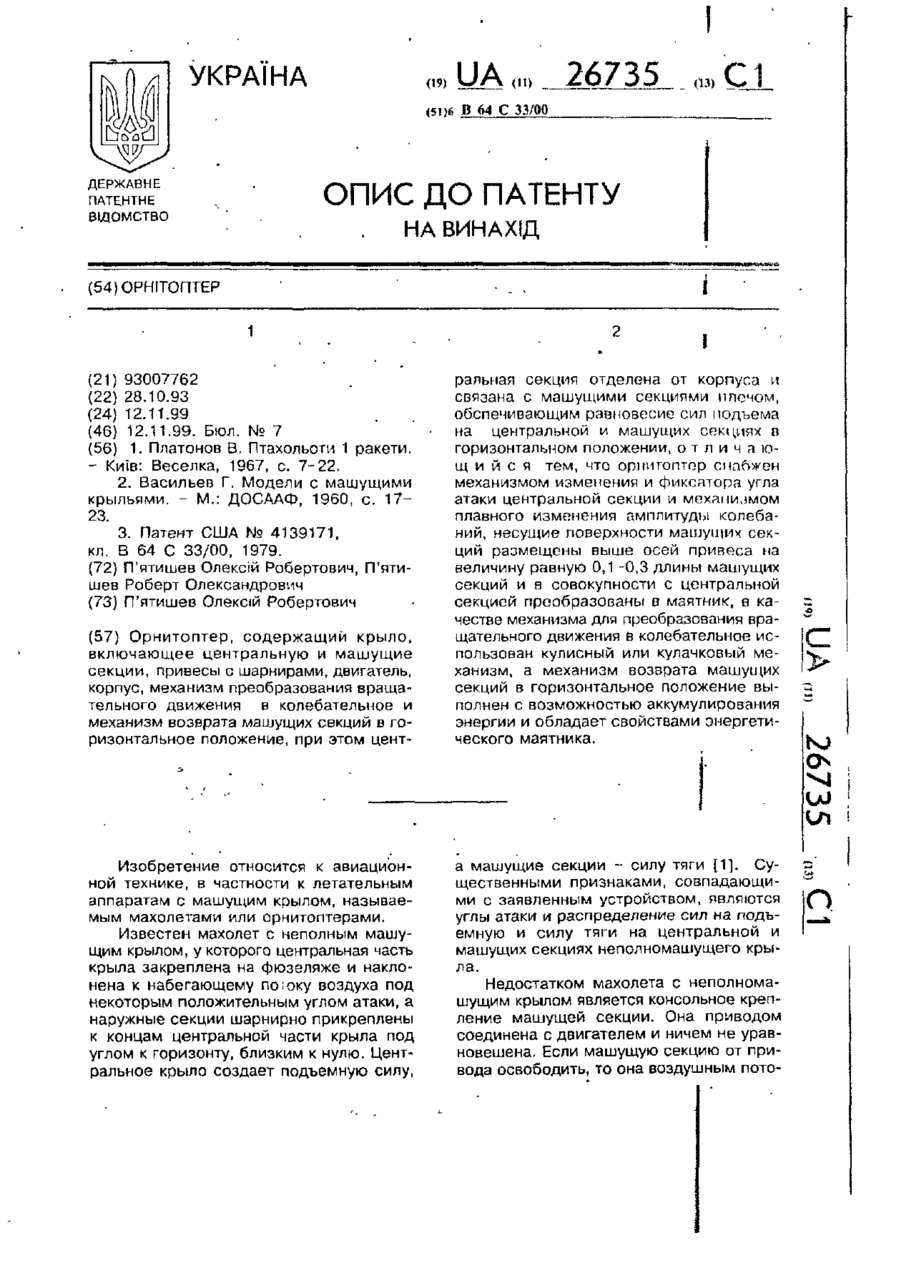
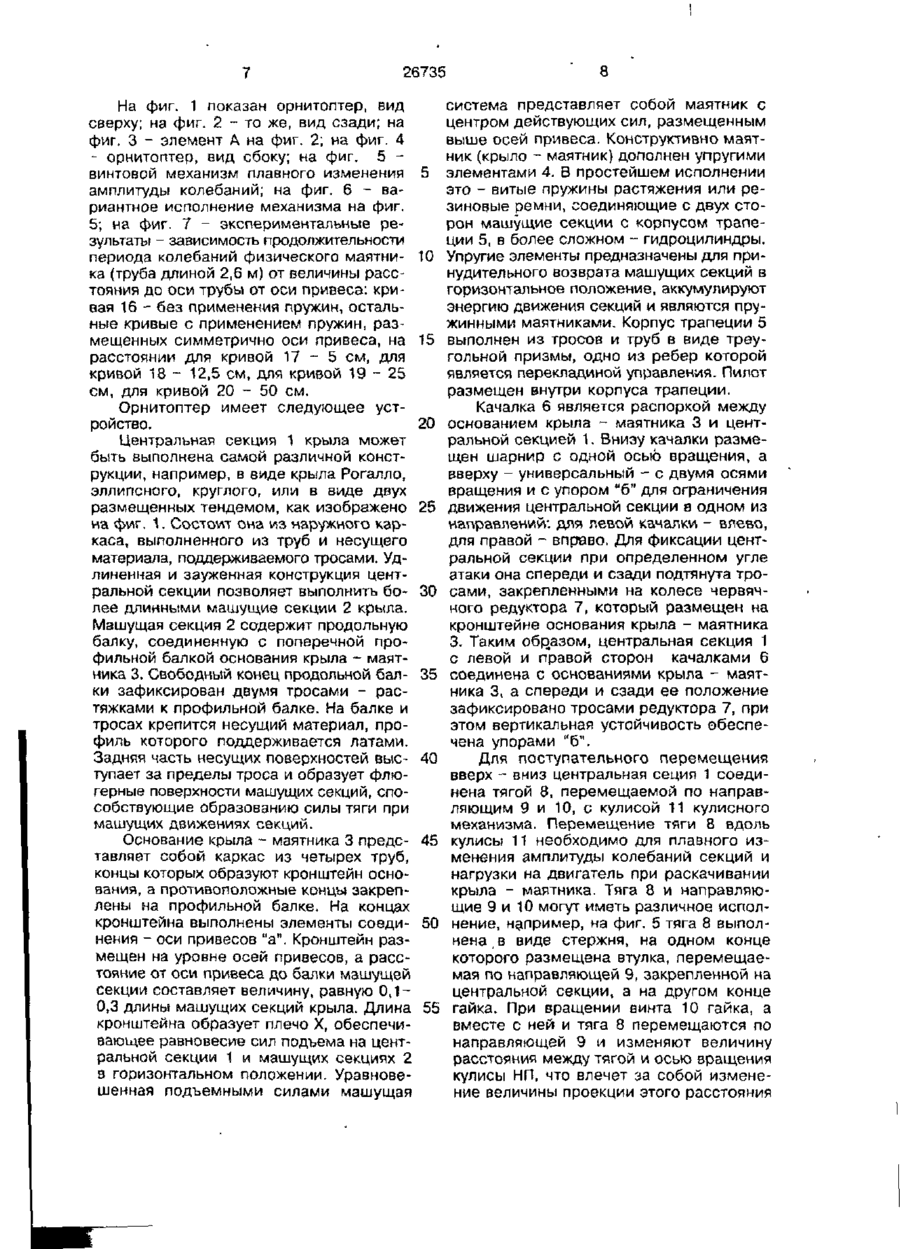
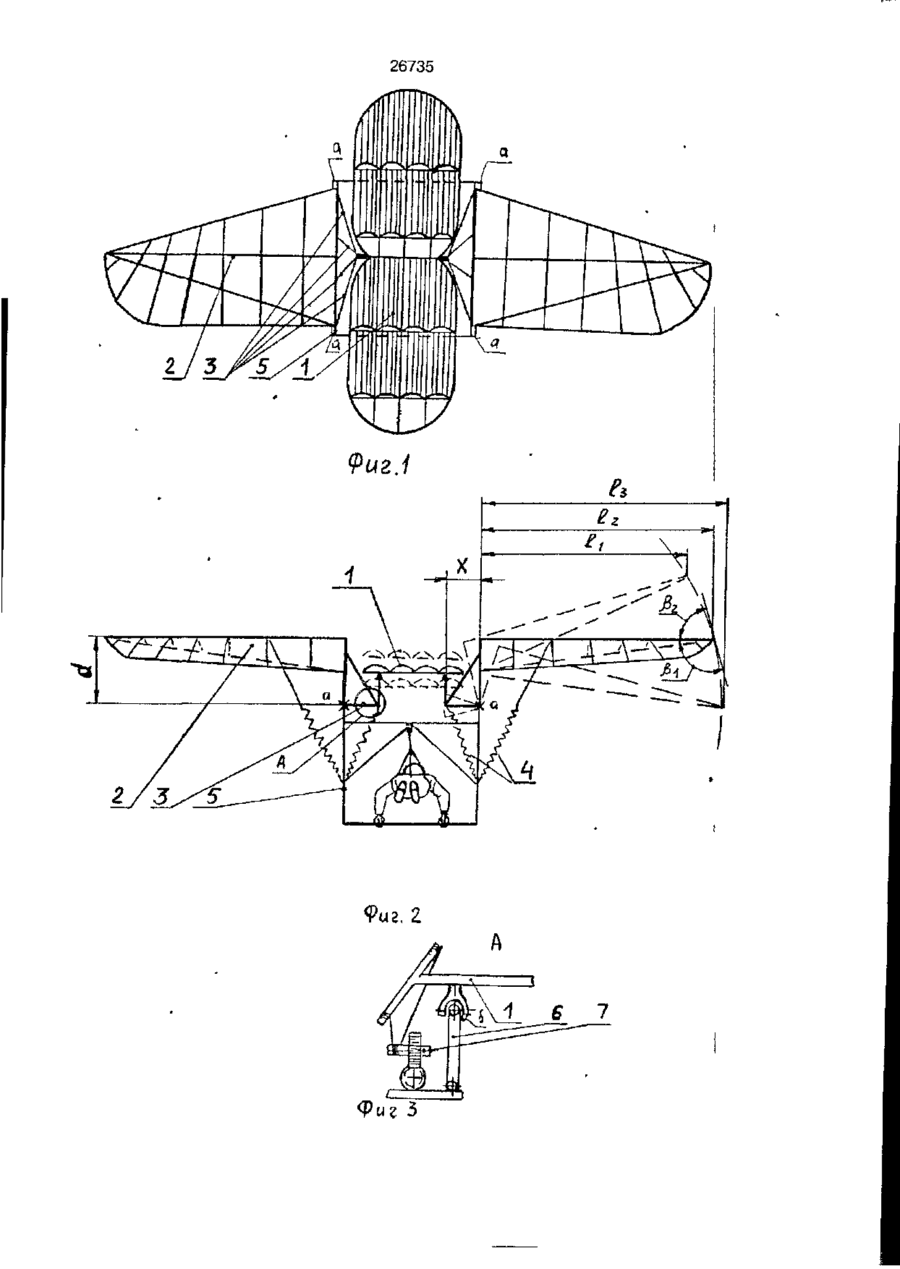
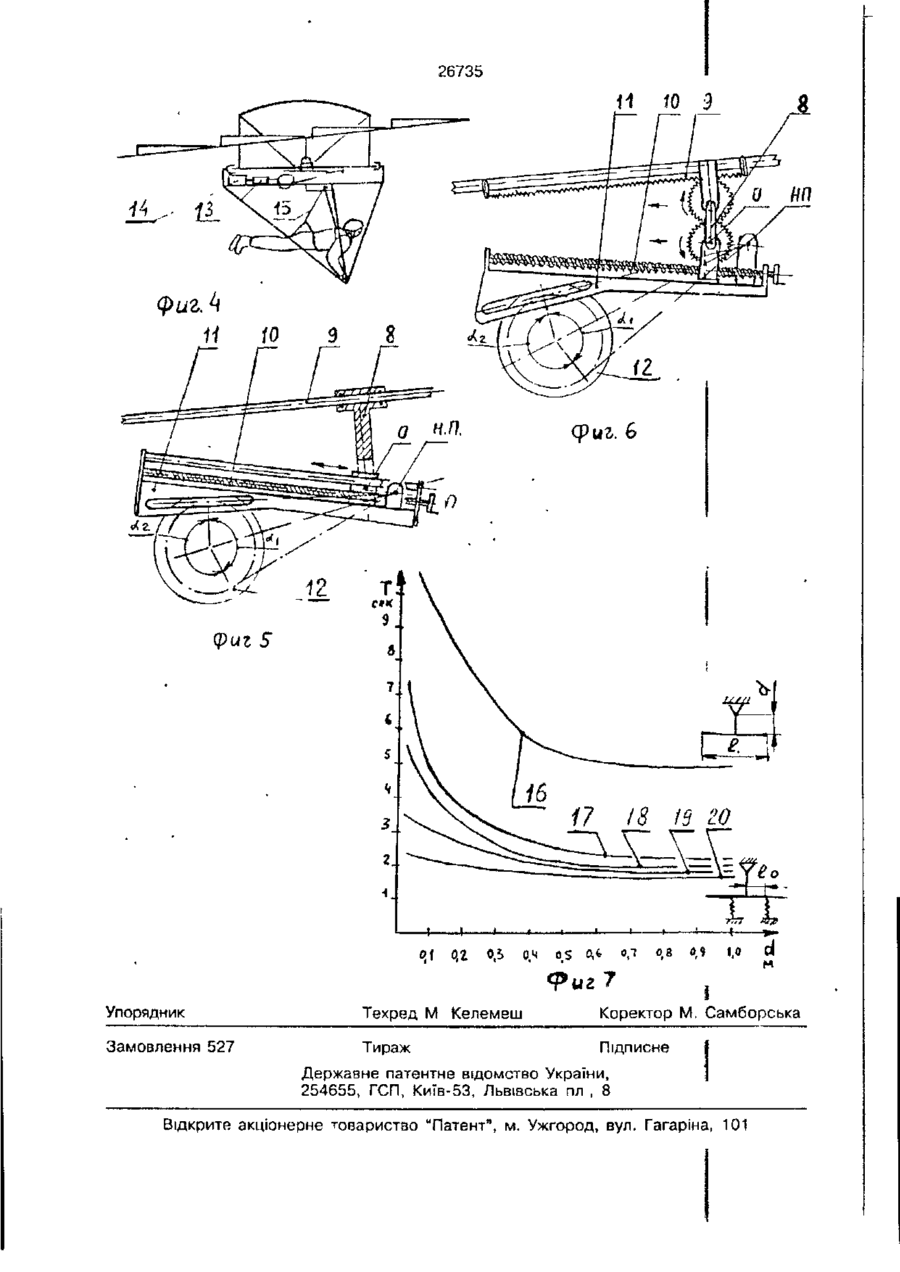
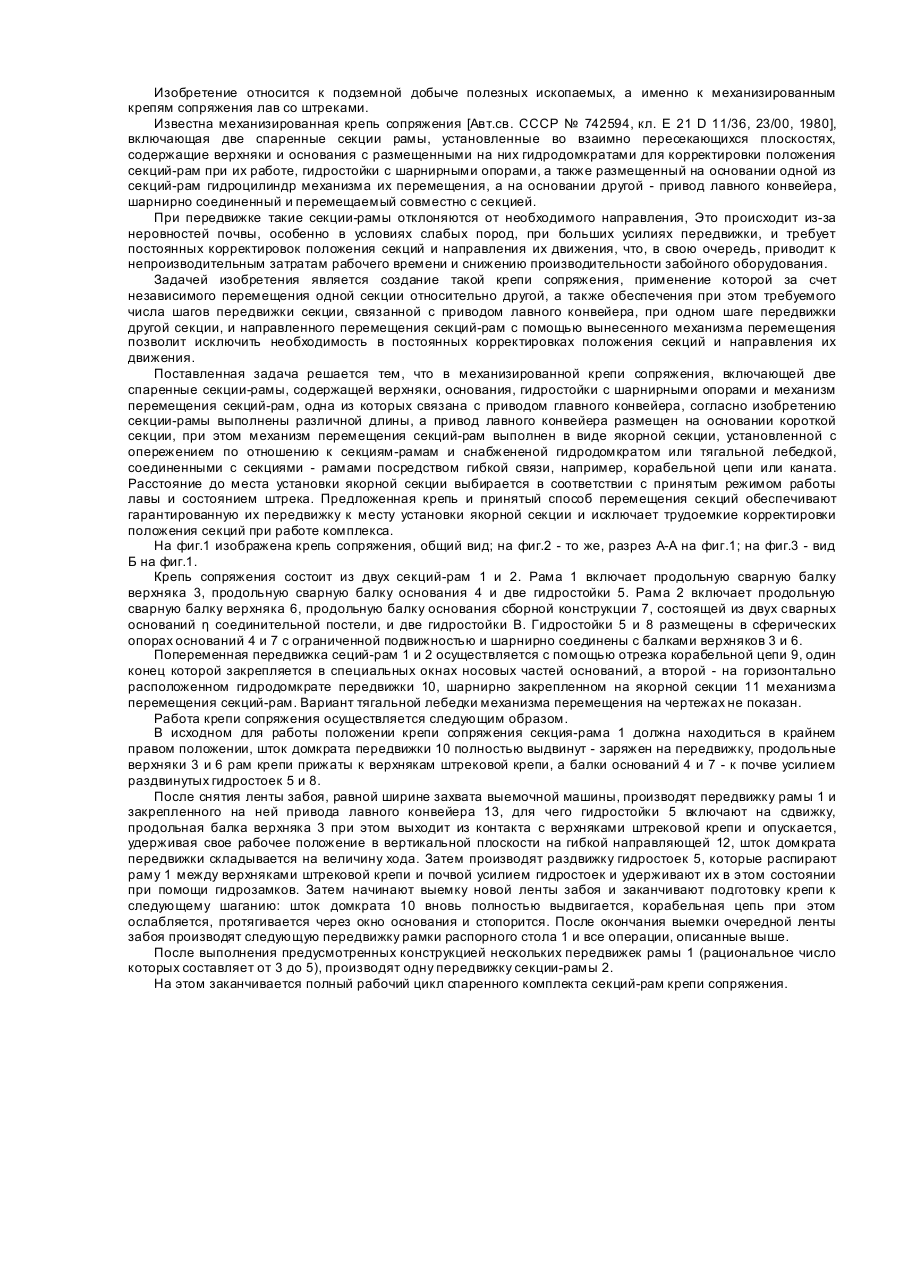
Орнитоптер, содержащий крыло, включающее центральную и машущие секции, привесы с шарнирами, двигатель, корпус, механизм преобразования вращательного движения в колебательное и механизм возврата машущих секций в горизонтальное положение, при этом цент ральная секция отделена от корпуса и связана с машущими секциями плечом, обспечивающим равновесие сил подъема на центральной и машущих секциях в горизонтальном положении, о т л и ч а ю щ и й с я тем, что орнитоптер снабжен механизмом изменения и фиксатора угла атаки центральной секции и механи шом плавного изменения амплитуды колебаний, несущие поверхности машущих секций размещены выше осей привеса на величину равную 0,1 -0,3 длины машущих секций и в совокупности с центральной секцией преобразованы в маятник, в качестве механизма для преобразования вращательного движения в колебательное использован кулисный или кулачковый механизм, а механизм возврата машущих секций в горизонтальное положение выполнен с возможностью аккумулирования энергии и обладает свойствами энергетического маятника. U) Изобретение относится к авиационной технике, в частности к летательным аппаратам с машущим крылом, называемым махолетами или орнитоптерами. Известен махолет с неполным машущим крылом, у которого центральная часть крыла закреплена на фюзеляже и наклонена к набегающему по * оку воздуха под некоторым положительным углом атаки, а наружные секции шарнирно прикреплены к концам центральной части крыла под углом к горизонту, близким к нулю. Центральное крыло создает подъемную силу, а машущие секции - силу тяги [1]. Существенными признаками, совпадающими с заявленным устройством, являются углы атаки и распределение сил на подъемную и силу тяги на центральной и машущих секциях неполномашущего крыла. Недостатком махолета с неполномашущим крылом является консольное крепление машущей секции. Она приводом соединена с двигателем и ничем не уравновешена. Если машущую секцию от привода освободить, то она воздушным пото 26735 ком будет заломлена вверх и сама горизонтального положения занять не может. На секцию действует крутящий момент и двигатель должен постоянно его преодолевать. 5 Этот недостаток устранен в махолете с цельномашущими крыльями, у которого левое крыло уравновешено правым за счет жесткого соединения их в одно цельное. В паре с другим цельным крылом они 10 оба работают по принципу ножниц [2]. Существенным признаком, совпадающим с заявленным устройством является простая возможность превращения его в крыло - маятник, достаточно поднять не- 15 сущие поверхности цёльномашущих крыльев выше оси привеса на величину равную 0,1-0,3 их длины. В названном махолете эта возможность была упущена. Недостаток махолета с цельномашу- 20 щими крыльями заключается в том, что длина крыла значительно возрастает при сравнении с неуравновешенным крылом, а вместе с длиной возрастает и момент инерции и, особенно, продолжительность 25 периода колебаний. Двигатель должен постоянно преодолевать момент инерции при наибольшей продолжительности периода колебаний крыла. Частично этот недостаток устранен в орнитоптере с шарнирным 30 крылом. Наиболее близким по технической сущности к заявленному устройству является, выбранный в качестве прототипа, орнитоптер с шарнирным крылом. Орни- 35 топтер содержит крыло, включающее центральную и машущие секции, привесы с шарнирами, двигатель, корпус, механизм преобразования вращательного движения в колебательное и механизм возврата ма- 40 шущих секций в горизонтальное положение При этом центральная секция отделена от корпуса и связана с машущими секциями плечом, обеспечивающим равновесие сил подъема на центральной и 45 машущих секциях в горизонтальном положении. Привод поступательно перемещает центральную секцию, она поворачивает на оси привеса промежуточные, а машущие секции являются продолжением промежу- 50 точных и имеют возможность флюгерного отклонения для увеличения силы тяги [3]. Существенным недостатком орнитоптера с шарнирным крылом является отсутствие устойчивого равновесия машу- 55 щих секций в горизонтальном положении. Происходит это потому, что при любом отклонении машущей секции от горизонтали подъемная сила на ней и ее плечо уменьшаются, а подъемная сила на цент ральной секции не зависит от ее перемещения и остается постоянной величиной. А поэтому, с прекращением машущих движений центральная секция стремится занять верхнее положение, минуя уравновешенную горизонталь при движении снизувверх по инерции, а при движении сверху-вниз она опуститься до горизонтали не может, так как уравновешивающий ее момент сил меньше по величине. Из-за отсутствия устойчивого равновесия в уравновешенном положении шарнирное крыло не может быть маятником. Отсутствие свойств маятника порождает второй недостаток - отсутствие естественной смены направления движения крыла, что приводит к борьбе с крылом. Попытки заставить крыло двигаться без естественной смены направления движения приводят к поломкам крыла или привода из-за усталостных напряжений в различных деталях крнструкции, что является общим недостатком для всех орнитоптеров. Размещение оси привеса в плоскости крыла порождает третий общий недостаток - разбрасывание воздушного потока от центра крыла в стороны. Экономичнее не удаление воздуха из-под крыла, а, наоборот, нагнетание его под машущую секцию путем подсасывания его из-за ометаемой плоскости. Еще одним общим недостатком является одинаковая скорость движения машущей секции вверх и вниз. Силы, действующие на машущую секцию, зависят не только от профиля верхней и нижней плоскостей секции, но и от скорости движения секции. Чтобы уменьшить сопротивление движению при подъеме и увеличить подъемную силу при опускании, надо, чтобы секция вверх двигалась медленнее, а вниз - быстрее. Все перечисленные недостатки увеличивают потери энергии. Для полномерных орнитоптеров они возрастают многократно и не позволяют выполнить машущий полет орнитоптера с пилотом, хотя маленькие модели летают уже более 100 лет. В основу изобретения поставлена задача создания орнитоптера, оснащенного крылом - маятником, в котором повышение КПД работы крыла обеспечивается уменьшением потерь энергии путем увеличения скорости движений крыла в маятниковом режиме. Поставленная задача решается тем, что в орнитоптере, содержащем крыло, включающее центральную и машущие сек 26735 ции, привесы с шарнирами, двигатель, корпус, механизм преобразования вращательного движения в колебательное и механизм возврата машущих секций в горизонтальное положение, при этом центральная секция отделена от корпуса и связана с машущими секциями плечом, обеспечивающим равновесие сил подъема на центральной и машущих секциях в горизонтальном положении, согласно изобретению орнитоптер снабжен механизмом изменения и фиксации угла атаки центральной секции и механизмом плавного изменения амплитуды колебаний, несущие поверхности машущих секций размещены выше осей привеса на величину равную 0,1-0,3 длины машущих секций и в совокупности с центральной секцией преобразованы в маятник, в качестве механизма для преобразования вращательного движения в колебательное использован кулисный или кулачковый механизм, а механизм возврата машущих секций в горизонтальное положение выполнен с возможностью аккумулирования энергии и обладает свойствами энергетического маятника. Суть изобретения выражается тем, что увеличение скорости машущих движений крыла достигается не увеличением мощности двигателя, а изменением конструктивных элементов крыла и условий их работы, делая условия работы более благоприятными за счет работы крыла в режиме маятника. Любой маятник имеет положение устойчивого равновесия и все колебания происходят относительно этого положения. При затухании колебаний маятник всегда занимает положение устойчивого равновесия. Движения маятника подчинены закону сохранения энергии, а скорость колебаний зависит от конструктивных элементов крыла - маятника. Отличительные признаки - орнитоптер снабжен механизмом изменения и фиксации угла атаки центральной секции и механизмом плавного изменения амплитуды колебаний - направлены на уменьшение энергетических затрат путем регулирования равновесия сил подъема на машущих и центральной секциях в горизонтальном положении при планирующем полете и регулировании величины нагрузки на двигатель путем плавного изменения амплитуды колебаний машущих секций. Отличительный признак - несущие поверхности машущих секций размещены выше осей привеса на величину равную 0,1-0,3 длины машущих секций и в совокупности с центральной секцией преоб 5 10 15 20 25 разованы в маятник - направлен на уменьшение величины периода колебаний крыла-маятника. Подтверждением этого является экспериментальное определение продолжительности периода колебаний для физического маятника, выполненного в виде трубы, размещенной ниже оси привеса на расстоянии величины d (фиг. 7). Во всех известных конструкциях орнитоптеров ось привеса размещена в плоскости крыла, а это значит, что величина d близка к нулю и поэтому период колебаний очень (бесконечно) велик и только у крыла - маятника при d = 0,3 длины машущих секций период колебаний имеет наименьшую продолжительность. При d равной нулю крыло занимает радиальное положение и разбрасывает воздушный поток. Крыло - маятник занимает тангенциальное положение, и поэтому машущие секции при движении вниз подсасывают воздух из-за ометаемой плоскости, перемещают его от конца секции к центру и создают дополнительный подпор, зато при движении вверх воздушный поток сбегает в обратном направлении, уменьшает сопротивление подъему секции и этим уменьшает затраты энергии. Третий отличительный признак - в ка30 честве механизма для преобразования вращательного движения в колебательное использован кулисный или кулачковый механизм - направлен на уменьшение величины периода колебаний и энергозатрат. 35 Суть его заключается в том,, что кулисный механизм при равномерном вращении кулисного колеса двигателем позволяет организовать движение машущих секций с разной скоростью, вверх - медленнее, 40 вниз - быстрее. Если замедленное движение вверх соответствует расчетному периоду колебаний, то ускоренное движение вниз уменьшает период колебаний. Движение машущей секции с замедлен45 ной скоростью способствует уменьшению сил сопротивления при подъеме и уменьшает энергозатраты. Четвертый отличительный признак механизм возврата машущих секций в 50 горизонтальное положение выполнен с возможностью аккумулирования энергии и обладает свойствами энергетического маятника - направлен на уменьшение периода колебаний и уменьшение энер55 гозатрат, так как происходит сложение действий двух маятников - крыла маятника и энергетического маятника. Все перечисленные отличительные признаки направлены на решение поставленной задачи. 26735 8 система представляет собой маятник с На фиг, 1 показан орнитоптер, вид центром действующих сил, размещенным сверху, на фиг. 2 - то же, вид сзади; на выше осей привеса. Конструктивно маятфиг 3 - элемент А на фиг. 2; на фиг. 4 ник (крыло - маятник) дополнен упругими - орнитоптер, вид сбоку; на фиг. 5 винтовой механизм плавного изменения 5 элементами 4. В простейшем исполнении амплитуды колебаний; на фиг. 6 - ваэто - витые пружины растяжения или рериантное исполнение механизма на фиг. зиновые ремни, соединяющие с двух сто5; на фиг. 7 - экспериментальные рерон машущие секции с корпусом трапезультаты - зависимость продолжительности ции 5, в более сложном - гидроцилиндры. периода колебаний физического маятни- 10 Упругие элементы предназначены для прика (труба длиной 2,6 м) от величины расснудительного возврата машущих секций в тояния до оси трубы от оси привеса: кригоризонтальное положение, аккумулируют вая 16 ~ без применения пружин, остальэнергию движения секций и являются пруные кривые с применением пружин, разжинными маятниками. Корпус трапеции 5 мещенных симметрично оси привеса, на 15 выполнен из тросов и труб в виде треурасстоянии для кривой 1 7 - 5 см, для гольной призмы, одно из ребер которой кривой 18 - 12,5 см, для кривой 19 - 25 является перекладиной управления. Пилот см, для кривой 20 - 50 см. размещен внутри корпуса трапеции. Качалка 6 является распоркой между Орнитоптер имеет следующее устройство. 20 основанием крыла ~ маятника 3 и центральной секцией 1. Внизу качалки размеЦентральная секция 1 крыла может щен шарнир с одной осью вращения, а быть выполнена самой различной конствверху - универсальный - с двумя осями рукции, например, в виде крыла Рогалло, вращения и с упором "б" для ограничения эллипсного, круглого, или в виде двух размещенных тендемом, как изображено 25 движения центральной секции в одном из на фиг. 1. Состоит она из наружного карнаправлений: для левой качалки - влево, каса, выполненного из труб и несущего для правой - вправо. Для фиксации центматериала, поддерживаемого тросами. Удральной секции при определенном угле линенная и зауженная конструкция центатаки она спереди и сзади подтянута троральной секции позволяет выполнить бо- 30 сами, закрепленными на колесе червячлее длинными машущие секции 2 крыла. ного редуктора 7, который размещен на Машущая секция 2 содержит продольную кронштейне основания крыла - маятника балку, соединенную с поперечной про3. Таким образом, центральная секция 1 фильной балкой основания крыла - маятс левой и правой сторон качалками 6 ника 3. Свободный конец продольной бал- 35 соединена с основаниями крыла - маятки зафиксирован двумя тросами - расника 3, а спереди и сзади ее положение тяжками к профильной балке. На балке и зафиксировано тросами редуктора 7, при тросах крепится несущий материал, проэтом вертикальная устойчивость обеспефиль которого поддерживается латами. чена упорами "б". Задняя часть несущих поверхностей высДля поступательного перемещения тупает за пределы троса и образует флю- 40 вверх - вниз центральная сеция 1 соедигерные поверхности машущих секций, спонена тягой 8, перемещаемой по направсобствующие образованию силы тяги при ляющим 9 и 10, с кулисой 11 кулисного машущих движениях секций. механизма. Перемещение тяги 8 вдоль Основание крыла - маятника 3 предс- 45 кулисы 11 необходимо для плавного изтавляет собой каркас из четырех труб, менения амплитуды колебаний секций и концы которых образуют кронштейн оснонагрузки на двигатель при раскачивании вания, а противоположные концы закрепкрыла - маятника. Тяга 8 и направляюлены на профильной балке. На концах щие 9 и 10 могут иметь различное исполкронштейна выполнены элементы соеди- 50 нение, например, на фиг. 5 тяга 8 выполнения - оси привесов "а". Кронштейн разнена, в виде стержня, на одном конце мещен на уровне осей привесов, а расскоторого размещена втулка, перемещаетояние от оси привеса до балки машущей мая по направляющей 9, закрепленной на секции составляет величину, равную 0 , 1 центральной секции, а на другом конце 0,3 длины машущих секций крыла. Длина 55 гайка. При вращении винта 10 гайка, а кронштейна образует плечо X, обеспечивместе с ней и тяга 8 перемещаются по вающее равновесие сил подъема на центнаправляющей 9 и изменяют величину ральной секции 1 и машущих секциях 2 расстояния между тягой и осью вращения й горизонтальном положении. Уравновекулисы НП, что влечет за собой изменешенная подъемными силами машущая ние величины проекции этого расстояния 26735 на вертикаль и амплитуды колебаний центральной секции. Недостатком этого механизма предполагается постоянное перемещение втулки взад - вперед в пределах изменения величины проекции расетояния между тягой и осью вращения кулисы НП на горизонталь Этот недостаток устранен в механизме, изображенном на фиг. 6. На фиг. 6 тяга 8 выполнена в виде двух сцепленных шестерен, размещенных на стержне, и находящихся в зацеплении, нижняя с червяком 10, а верхняя - с рейкой 9. При вращении червяка 10 нижняя шестерня вращается вокруг оси и заставляет вращаться верхнюю, а верхняя, перекатываясь по рейке 9, перемещает тягу 8 вдоль рейки и вместе с тягой нижняя шестерня вынуждена перекатываться по червяку. При любых угловых перемещениях кулисы нижняя шестерня находится в зацеплении с червяком, но не одной постоянной, а переменными точками. Изменение величины проекции расстояния между тягой и осью вращения кулисы на горизонталь компенсируется перекатыванием точки сцепления червяка и шестерни. Общей частью механизмов фиг. 5 и фиг. 6 является качающаяся направляющая, известная как качающийся рычаг в кулачковых механизмах. Применение ку~ лачкового или кулисного механизмов в приводе равнозначно: главное - придать тяге и секциям ^различную скорость движения при рабочем и холостом ходе при постоянной скорости вращения кулисного колеса 12. Кулисный механизм в приводе выглядит предпочтительнее ввиду большей величины амплитуды колебаний. Различие скоростей рабочего и холостого хода объясняется тем, что при перемещениях кулисы из одного крайнего положения в другое, кулисное колесо проходит за один оборот разные внутренний - а, и наружный - ос2 углы. При этом внутренний угол всегда меньше наружного. Соотношение этих углов влияет на соотношение скоростей рабочего и холостого хода кулисы, а вместе с ней центральной и машущих секций крыла. 5 10 15 20 25 30 35 40 45 Редуктор 13 введен в орнитоптер для 50 приведения в соответствие скорости вращения кулисного колеса 12 и двигателя 14 с периодом колебаний крыла - маятника. К верхней части корпуса трапеции прикреплена подвесная система пилота 15. 55 Орнитоптер работает следующим образом. В достартовом режиме, когда скорость набегающего потока воздуха равна нулю, центральная секция 1 и машущие секции 2, размещенные на основании кры 10 ла - маятника 3, находятся под действием только сил тяжести, а центр тяжести размещен выше осей привеса, поэтому секции находятся в состоянии неустойчивого равновесия и склонны к заваливанию. Заваливанию секций препятствует сила упругих элементов 4, которые стремятся удержать секции в горизонтальном положении и уменьшить величину заваливания. В стартовом режиме при разбеге по склону горы на центральной и машущих секциях крыла появляется подъемная сила, превосходящая по величине силы тяжести секций, и секции приобретают состояние устойчивого равновесия. После отрыва от склона горы пилот, плавно увеличивая амплитуду колебаний секций, вводит.орнитоптер в режим машущего полета. В стартовом режиме по горизонтали с началом машущих движений на машущих секциях появляются подъемная сила и сила тяги, но подъемная сила еще недостаточна для отрыва от горизонтали. Сила тяги толкает орнитоптер в направлении движения и пилот ногами помогает осуществить разбег. Для уменьшения сил сопротивления пилот трапецией 5 уменьшает угол атаки центральной секции и орнитоптер набирает скорость необходимую для отрыва от горизонтали. При увеличении угла атаки набегающий поток воздуха создает на центральной и машущих секциях подъемную силу и орнитоптер взлетает. Изменяя угол атаки, увеличивая или уменьшая его, пилот производит машущий полет с набором высоты,горизонтальный или со снижением. Снижение можно производить и при планирующем полете. В любом режиме полета - машущем или планирующем - подъемная сила центральной секции уравновешена подъемной силой машущих секций, центры приложения этих сил размещены выше осей привеса и все секции находятся в состоянии устойчивого равновесия. Положение устойчивого равновесия обеспечивается регулированием угла атаки центральной секции, поворачивая ее вокруг оси верхнего шарнира качалки 6, вращением червяка редуктора 7. При планировании с минимальным снижением машущие секции занимают горизонтальное положение, а планирование с приподнятыми машущими секциями увеличивает скорость снижения без увеличения горизонтальной скорости, что может пригодиться пилоту для снижения по крутой траектории, а, возвратив редуктором машущие секции об 11 26735 ратно а горизонтальное положение, производить нормальную посадку. Таким образом, пилот может производить снижение как по пологой, так и по крутой траектории, не превышая расчетную горизонтальную скорость. Машущие движения крыла - маятника обеспечиваются возвратно-поступательным перемещением центральной секции тягой 8. Когда тяга 8 перемещает центральную секцию вверх, она качалкой 6 поворачивает основание крыла - маятника вокруг оси привеса, а основание перемещает машущие секции 2 вниз и одновременно смещает их наружу, так как несущие поверхности машущих секций размещены выше осей привеса на величину равную 0,1-0,3 их длины. За счет такого размещения машущих секций их крутящий момент возрастает от минимальной величины в верхнем положении до максимальной в нижнем. Промежуточную величину крутящего момента машущая секция имеет в горизонтальном положении; когда крутящие моменты центральной секции с плечом X и машущих секций с плечем І 2 уравновешивают друг друга, тогда машущие секции в совокупности с центральной преобазованы в маятник и занимают положение устойчивого равновесия (см. фиг. 2). Если бы машущая _ секция при переходе к планирующему полету остановилась в верхнем положении, то расстояние от оси привеса до конца машущей секции станет I,, ее крутящий момент будет меньше крутящего момента сил центральной секции и тогда центральная секция вернет машущую в горизонтальное положение. Если она остановилась бы в нижнем положении с расстоянием от оси привеса до конца машущей секции равном 13, тогда крутящий момент сил, действующих на машущие секции, стал бы больше крутящего момента центральной секции, и тогда машущие секции вернули бы все секции в положение устойчивого равновесия. Тем более гарантирован возврат машущих секций из любого положения в горизонтальное при наличии упругих элементов 4, так как возвращающаяся сила их всегда направлена к положению устойчивого равновесия. Действие обеих возвращающихся сил крыла - маятника и упругого элемента совпадает по времени и направлению действия. Случайные колебания секций, возникающие от неравномерности рывков набегающего потока воздуха, гасятся упругой связью машущих секций с упругими элементами, так как они работают как амортизаторы. 5 10 15 20 25 30 35 40 45 50 55 12 Для перехода от машущего полета к планирующему и принудительного возврата машущих секций в горизонтальное положение пилот перемещает тягу 8 направляющим 9 и 10 вращением винта 10 (см.фиг. 5) или червяка 10 (см. фиг. 6) в нейтральное положение НП, которое совпадает с осью вращения кулисы 11. Тогда расстояние между тягой 8 и осью вращения кулисы чНП будет равно нулю, проекция этого расстояния на вертикаль тоже равна нулю и возвратно переменное поступательное перемещение тяги 8, центральной, а вместе с ними и машущих секций, будет прекращено, несмотря на продолжающееся вращение кулисного колеса 12, редуктора 13 и двигателя 14. Таким образом, при планирующем полете возврату машущих секций в горизонтальное положение способствуют крыло маятник и упругий элемент как два маятника и воздействие пилота на механизм плавного изменения амплитуды колебаний путем уменьшения амплитуды колебаний до нуля. Пилот размещен в подвесной системе 15, с помощью гибких валиков управляет механизмами и, изменяя положение своего тела относительно ручки управления трапеции, маневрирует орнитоптером. Для перехода от планирующего полета к машущему крыло - маятник необходимо раскачать до определенной амплитуды колебаний. При этом, двигатель 14 через редуктор 13 вращает с постоянной скоростью кулисное колесо 12 и заставляет перемещаться кулису 11 относительно ее центра вращения из одного крайнего положения в другое. Колесо описывает разные внутренний - а, и наружный - Oj углы и пропорционально величине этих углов соответствует скорость рабочего и холостого хода кулисы. Пилот, вращая винт 10 (фиг. 5) или червяк 10 (фиг. 6), по направляющей 9 перемещает тягу 8 вдоль кулисы, и увеличивает расстояние между тягой и осью вращения кулисы НП от нуля до необходимой ему величины. Соответственно величине этого расстояния возрастает его проекция на вертикаль, которая и определяет величину амплитуды колебаний тяги. Направляющая 9 передает движение центральной секции, придавая тяге 8 угол относительно центра вращения тяги 0, соответствующий углу атаки центральной секции. Возвратно поступательные движения центральной секции передаются качалкой 6 основанию крыла - маятника 3 и поворачивают его вокруг оси привеса попеременно то в од 13 26735 • ну, то в другую стороны, а вместе с основанием поворачивается и машущая секция 2. Машущие секции 2, левая и правая одновременно, совершают машущие вращательные движения обратные направлению возвратно поступательного движения центральной секции 1. Если центральная секция двигается вверх, то машущие секции, поворачиваясь вокруг оси привеса, обе одновременно идут вниз и наоборот, при этом сохраняется закономерность для машущих секций: холостой ход вверх медленно, рабочий ход вниз - быстрее. Для обеспечения движения машущих секций в заданном режиме кулиса должна перемещаться при рабочем ходе кулисы вниз медленно, а при холостом ходе вверх - быстрее. Возникает противоречие в том, что для холостого хода машущей секции используется рабочий ход кулисы и наоборот, холостой ход кулисы для машущей секции используется как рабочий. Это противоречие устраняется работой упругих элементов 4, которые аккумулируют энергию при отклонении машущей секции от горизонтали и возвращают энергию при обратном направлении движения секции. Кинетическая энергия машущей секции при перемене направления движения затрачивается на растяжение (или сжатие) упругого элемента, а не на образование усталостных напряжений. Упругий элемент работает как аккумулятор энергии, амортизатор, возвращатель секции в горизонтальное положение и ускоритель машущих движений одновременно. Движение машущих секций крыла - маятника ускоренное действием энергетического маятника обеспечивает естественную смену направления движения и устраняет борьбу с инерцией движения машущих секций. 5 10 15 20 25 30 35 40 Размещение несущих поверхностей машущих секций выше осей привеса на величину равную 0,1-03 их длины влияет на характер движения воздушного потока. 45 Так как ось вращения размещена вне 14 плоскости машущей секции, то секция относительно оси вращения становится тангенциальной, и поэтмоу углы р, и р2, образованные линиями балки секции и касательной к траектории движения конца секции, становятся разными и не равны 90 градусов. Если ось вращения размещена в плоскости секции, то углы равны 90 градусов, секция является радиальной и разбрасывает воздушный поток. Тангенциальная машущая секция при движении вниз подсасывает воздух из-за ометаемой плоскости и создает под секцией дополнительный подпор, а при движении вверх воздушный поток сбегает с нее и уменьшает сопротивление подъему секции. Энергетическая эффективность предложенного орнитоптера выражена уменьшением энергозатрат по следующим причинам: 1) устранена борьба двигателя с инерцией машущих секций за счет преобразования центральной и машущих секций в крыло - маятник путем размещения машущих секций выше осей привеса; 2) уменьшена нагрузка на двигатель за счет увеличения частоты свободных колебаний путем уменьшения величины периода колебаний крыла - маятника; 3) уменьшена нагрузка на двигатель путем плавного изменения амплитуды колебаний от нуля до максимальной возможной величины; 4) уменьшена нагрузка на двигатель путем аккумулирования энергии движения машущих секций упругими элементами и возвращении ее при обратном движении; 5) уменьшены силы сопротивления движению машущих секций при их подъеме за счет использования в приводе кулисного механизма; 6) нет крутящих моментов, компенсируемых работой двигателя, за счет уравновешивания .машущих секций центральной в положении устойчивого равновесия. 26735 Фиг.1 Фиг 1 Фиг 3 У КРАЇ НА (19) UA(,,, 26735 „з, СІ (51)6 В 64 С 33/00 ДЕРЖАВНЕ ПАТЕНТНЕ ВІДОМСТВО ОПИС ДО ПАТЕНТУ НА ВИНАХІД (54) ОРНІТОПТЕР I (21) 93007762 (22) 28.10.93 (24) 12.11.99 (46) 12.11.99. Бюл. № 7 (56) 1. Платонов В. Птахольоти 1 ракети. - Київ: Веселка, 1967, с 7-22. 2. Васильєв Г. Модели с машущими крыльями. - М.: ДОСААФ, 1960, с. 1723. 3. Патент США № 4139171, кл. В 64 С 33/00, 1979. (72) П'ятишев Олексій Робертович, П'ятишев Роберт Олександрович (73) П'ятишев Олексій Робертович (57) Орнитоптер, содержащий крыло, включающее центральную и машущие секции, привесы с шарнирами, двигатель, корпус, механизм преобразования вращательного движения в колебательное и механизм возврата машущих секций в горизонтальное положение, при этом цент ральная секция отделена от корпуса и связана с машуаіими секциями плечом, обспечивающим равновесие сил подъема на центральной и машущих секциях в горизонтальном положении, о т л и ч а ю щ и й с я тем, что ормитоптор снабжен механизмом изменения и фиксатора угла атаки центральной секции и механизмом плавного изменения амплитуды колебаний, несущие поверхности машущих секций размещены выше осей привеса на величину равную 0,1 -0,3 длины машущих секций и в совокупности с центральной секцией прообразованы в маятник, а качестве механизма для преобразования вращательного движения в колебательное использован кулисный или кулачковый механизм, а механизм возврата машущих секций в горизонтальное положение выполнен с возможностью аккумулирования энергии и обладает свойствами энергетического маятника. LO Изобретение относится к авиационной технике, в частности к летательным аппаратам с машущим крылом, называемым махолетами или орнитоптерами. Известен махолет с неполным машущим крылом, у которого центральная часть крыла закреплена на фюзеляже и наклонена к набегающему по І оку воздуха под некоторым положительным углом атаки, а наружные секции шарнирно прикреплены к концам центральной части крыла под углом к горизонту, близким к нулю. Центральное крыло создает подъемную силу, а машущие секции - силу тяги [1]. Существенными признаками, совпадающими с заявленным устройством, являются углы атаки и распределение сил на подъемную и силу тяги на центральной и машущих секциях неполномашущего крыла. Недостатком махолета с неполномашущим крылом является консольное крепление машущей секции. Она приводом соединена с двигателем и ничем не уравновешена. Если машущую секцию от привода освободить, то она воздушным пото О 26735 ком будет заломлена вверх и сама горизонтального положения занять не может. На секцию действует крутящий момент и двигатель должен постоянно его преодолевать. 5 Этот недостаток устранен в махолете с цельномашущими крыльями, у которого левое крыло уравновешено правым за счет жесткого соединения их в одно цельное. В паре с другим цельным крылом они 10 оба работают по принципу ножниц [2]. Существенным признаком, совпадающим с заявленным устройством является простая возможность превращения его в крыло - маятник: достаточно поднять не- 15 сущие поверхности цельно машущих крыльев выше оси привеса на величину равную 0,1-0,3 их длины. В названном махолете эта возможность была упущена. Недостаток махолета с цельномашу- 20 щими крыльями заключается в том, что длина крыла значительно возрастает при сравнении с неуравновешенным крылом, а вместе с длиной возрастает и момент инерции и, особенно, продолжительность 25 периода колебаний. Двигатель должен постоянно преодолевать момент инерции при наибольшей продолжительности периода колебаний крыла. Частично этот недостаток устранен ворнитоптере с шарнирным 30 крылом. Наиболее близким по технической сущности к заявленному устройству является, выбранный в качестве прототипа, орнитоптер с шарнирным крылом. Орни- 35 топтер содержит крыло, включающее центральную и машущие секции, привесы с шарнирами, двигатель, корпус, механизм преобразования вращательного движения в колебательное и механизм возврата ма- 40 шущих секций в горизонтальное положение. При этом центральная секция отделена от корпуса и связана с машущими секциями плечом, обеспечивающим равновесие сил подъема на центральной и 45 машущих секциях в горизонтальном положении. Привод поступательно перемещает центральную секцию, она поворачивает на оси привеса промежуточные, а машущие секции являются продолжением промежу- 50 точных и имеют возможность флюгерного отклонения для увеличения силы тяги [3]. Существенным недостатком орнитоптера с шарнирным крылом является отсутствие устойчивого равновесия машущих секций в горизонтальном положении. 55 Происходит это потому, что при любом отклонении машущей секции от горизонтали подъемная сила на ней и ее плечо уменьшаются, а подъемная сила на цент ральной секции не зависит от ее перемещения и остается постоянной величиной. А поэтому, с прекращением машущих движений центральная секция стремится занять верхнее положение, минуя уравновешенную горизонталь при движении снизувверх по инерции, а при движении сверху-вниз она опуститься до горизонтали не может, так как уравновешивающий ее момент сил меньше по величине. Из-за отсутствия устойчивого равновесия в уравновешенном положении шарнирное крыло не может быть маятником. Отсутствие свойств маятника порождает второй недостаток - отсутствие естественной смены направления движения крыла, что приводит к борьбе с крылом. Попытки заставить крыло двигаться без естественной смены направления движения приводят к поломкам крыла или привода из-за усталостных напряжений в различных деталях крнструкции, что является общим недостатком для всех орнитоптеров. Размещение оси привеса в плоскости крыла порождает третий общий недостаток - разбрасывание воздушного потока от центра крыла в стороны. Экономичнее не удаление воздуха из-под крыла, а, наоборот, нагнетание его под машущую сек-' цию путем подсасывания его из-за ометаемой плоскости. Еще одним общим недостатком является одинаковая скорость движения машущей секции вверх и вниз. Силы, действующие на машущую секцию, зависят не только от профиля верхней и нижней плоскостей секции, но и от скорости движения секции. Чтобы уменьшить сопротивление движению при подъеме и увеличить подъемную силу при опускании, надо, чтобы секция вверх двигалась медленнее, а вниз - быстрее. Все перечисленные недостатки увеличивают потери энергии. Для полномерных орнитоптеров они возрастают многократно и не позволяют выполнить машущий полет орнитоптера с пилотом, хотя маленькие модели летают уже более 100 лет. В основу изобретения поставлена задача создания орнитоптера, оснащенного крылом - маятником, в котором повышение КПД работы крыла обеспечивается уменьшением потерь энергии путем увеличения скорости движений крыла в маятниковом режиме. Поставленная задача решается тем, что в орнитоптере, содержащем крыло, включающее центральную и машущие сек 26735 ции, привесы с шарнирами, двигатель, корпус, механизм преобразования вращательного движения в колебательное и механизм возврата машущих секций в горизонтальное положение, при этом цент- 5 ральная секция отделена от корпуса и связана с машущими секциями плечом, обеспечивающим равновесие сил подъема на центральной и машущих секциях в горизонтальном положении, согласно изоб- 10 ретению орнитоптер снабжен механизмом изменения и фиксации угла атаки центральной секции и механизмом плавного изменения амплитуды колебаний, несущие поверхности машущих секций разме- 15 щены выше осей привеса на величину равную 0,1-0,3 длины машущих секций и в совокупности с центральной секцией преобразованы в маятник, в качестве механизма для преобразования вращатель- 20 ного движения в колебательное использован кулисный или кулачковый механизм, а механизм возврата машущих секций в горизонтальное положение выполнен с возможностью аккумулирования энергии 25 и обладает свойствами энергетического маятника. Суть изобретения выражается тем, что увеличение скорости машущих движений крыла достигается не увеличением мощности двигателя, а изменением конструктивных элементов крыла и условий их работы, делая условия работы более благоприятными за счет работы крыла в режиме маятника. Любой маятник имеет положение устойчивого равновесия и все колебания происходят относительно этого положения. При затухании колебаний маятник всегда занимает положение устойчивого равновесия. Движения маятника подчинены закону сохранения энергии, а скорость колебаний зависит от конструктивных элементов крыла - маятника. Отличительные признаки - орнитоптер снабжен механизмом изменения и фиксации угла атаки центральной секции и механизмом плавного изменения амплитуды колебаний - направлены на уменьшение энергетических затрат путем регулирования равновесия сил подъема на машущих и центральной секциях в горизонтальном положении при планирующем полете и регулировании величины нагрузки на двигатель путем плавного изменения амплитуды колебаний машущих секций. Отличительный признак - несущие поверхности машущих секций размещены выше осей привеса на величину равную 0,1-0,3 длины машущих секций и в совокупности с центральной секцией преоб разованы в маятник - направлен на уменьшение величины периода колебаний крыла-маятника. Подтверждением этого является экспериментальное определение продолжительности периода колебаний для физического маятника, выполненного в виде трубы, размещенной ниже оси привеса на расстоянии величины d (фиг. 7). Во всех известных конструкциях орнитоптеров ось привеса размещена в плоскости крыла, а это значит, что величина d близка к нулю и поэтому период колебаний очень (бесконечно) велик и только у крыла - маятника при d = 0,3 длины машущих секций период колебаний имеет наименьшую продолжительность. При d равной нулю крыло занимает радиальное положение и разбрасывает воздушный поток- Крыло - маятник занимает тангенциальное положение, и поэтому машущие секции при движении вниз подсасывают воздух из-за ометаемой плоскости, перемещают его от конца секции к центру и создают дополнительный подпор, зато при даижении вверх воздушный поток сбегает в обратном направлении, уменьшает сопротивление подъему секции и этим уменьшает затраты энергии. Третий отличительный признак - в ка30 честве механизма для преобразования вращательного движения в колебательное использован кулисный или кулачковый механизм - направлен на уменьшение величины периода колебаний и энергозатрат. 35 Суть его заключается в том4 что кулисный механизм при равномерном вращении кулисного колеса двигателем позволяет организовать движение машущих секций с разной скоростью: вверх - медленнее, 40 вниз - быстрее. Если замедленное движение вверх соответствует расчетному периоду колебаний, то ускоренное движение вниз уменьшает период колебаний. Движение машущей секции с замедлен45 ной скоростью способствует уменьшению сил сопротивления при подъеме и уменьшает энергозатраты. Четвертый отличительный признак механизм возврата машущих секций в 50 горизонтальное положение выполнен с возможностью аккумулирования энергии и обладает свойствами энергетического маятника - направлен на уменьшение периода колебаний и уменьшение энер55 гозатрат, так как происходит сложение действий двух маятников - крыла маятника и энергетического маятника. Все перечисленные отличительные признаки направлены на решение поставленной задачи. 26735 На фиг. 1 показан орнитоптер, вид сверху; на фиг. 2 - то же, вид сзади; на фиг. 3 - элемент А на фиг. 2; на фиг. 4 - орнитоптер, вид сбоку; на фиг. 5 винтовой механизм плавного изменения 5 амплитуды колебаний; на фиг. 6 - вариантное исполнение механизма на фиг. 5; на фиг. 7 - экспериментальные результаты - зависимость продолжительности периода колебаний физического маятни- 10 ка (труба длиной 2,6 м) от величины расстояния до оси трубы от оси привеса: кривая 16 - без применения пружин, остальные кривые с применением пружин, размещенных симметрично оси привеса, на 15 расстоянии для кривой 1 7 - 5 см, для кривой 18 - 12,5 см, для кривой 19 - 25 см, для кривой 20 - 50 см. Орнитоптер имеет следующее устройство. Центральная секция 1 крыла может быть выполнена самой различной конструкции, например, в виде крыла Рогалло, эллипсного, круглого, или в виде двух размещенных тендемом, как изображено на фиг. 1. Состоит она из наружного каркаса, выполненного из труб и несущего материала, поддерживаемого тросами. Удлиненная и зауженная конструкция центральной секции позволяет выполнить более длинными машущие секции 2 крыла. Машущая секция 2 содержит продольную балку, соединенную с поперечной профильной балкой основания крыла - маятника 3. Свободный конец продольной балки зафиксирован двумя тросами - растяжками к профильной балке. На балке и тросах крепится несущий материал, профиль которого поддерживается латами. Задняя часть несущих поверхностей выступает за пределы троса и образует флюгерные поверхности машущих секций, способствующие образованию силы тяги при машущих движениях секций. 20 25 30 35 40 Основание крыла - маятника 3 предс- 45 тавляет собой каркас из четырех труб, концы которых образуют кронштейн основания, а противоположные концы закреплены на профильной балке. На концах кронштейна выполнены элементы соеди- 50 нения - оси привесов "а". Кронштейн размещен на уровне осей привесов, а расстояние от оси привеса до балки машущей секции составляет величину, равную 0 , 1 0,3 длины машущих секций крыла. Длина 55 кронштейна образует плечо X, обеспечивающее равновесие сил подъема на центральной секции 1 и машущих секциях 2 э горизонтальном положении. Уравновешенная подъемными силами машущая 8 система представляет собой маятник с центром действующих сил, размещенным выше осей привеса. Конструктивно маятник (крыло - маятник) дополнен упругими элементами 4. В простейшем исполнении это - витые пружины растяжения или резиновые ремни, соединяющие с двух сторон машущие секции с корпусом трапеции 5, в более сложном - гидроцилиндры. Упругие элементы предназначены для принудительного возврата машущих секций в горизонтальное положение, аккумулируют энергию движения секций и являются пружинными маятниками. Корпус трапеции 5 выполнен из тросов и труб в виде треугольной призмы, одно из ребер которой является перекладиной управления. Пилот размещен внутри корпуса трапеции. Качалка 6 является распоркой между основанием крыла - маятника 3 и центральной секцией 1. Внизу качалки размещен шарнир с одной осью вращения, а вверху - универсальный - с двумя осями вращения и с упором "б" для ограничения движения центральной секции в одном из направлений: для левой качалки - влево, для правой - вправо. Для фиксации центральной секции при определенном угле атаки она спереди и сзади подтянута тросами, закрепленными на колесе червячного редуктора 7, который размещен на кронштейне основания крыла - маятника 3. Таким образом, центральная секция 1 с левой и правой сторон качалками 6 соединена с основаниями крыла - маятника 3, а спереди и сзади ее положение зафиксировано тросами редуктора 7, при этом вертикальная устойчивость обеспечена упорами "б". Для поступательного перемещения вверх - вниз центральная сеция 1 соединена тягой 8, перемещаемой по направляющим 9 и 10, с кулисой 11 кулисного механизма. Перемещение тяги 8 вдоль кулисы 11 необходимо для плавного изменения амплитуды колебаний секций и нагрузки на двигатель при раскачивании крыла - маятника. Тяга 8 и направляющие 9 и 10 могут иметь различное исполнение, например, на фиг. 5 тяга 8 выполнена, в виде стержня, на одном конце которого размещена втулка, перемещаемая по направляющей 9, закрепленной на центральной секции, а на другом конце гайка. При вращении винта 10 гайка, а вместе с ней и тяга 8 перемещаются по направляющей 9 и изменяют величину расстояния между тягой и осью вращения кулисы НП, что влечет за собой изменение величины проекции этого расстояния 26735 на вертикаль и амплитуды колебаний центральной секции. Недостатком этого механизма предполагается постоянное перемещение втулки взад - вперед в пределах изменения величины проекции расетояния между тягой и осью вращения кулисы НП на горизонталь. Этот недостаток устранен в механизме, изображенном на фиг. 6. На фиг. 6 тяга 8 выполнена в виде двух сцепленных шестерен, размещенных на стержне, и находящихся в зацеплении, нижняя с червяком 10, а верхняя - с рейкой 9. При вращении червяка 10 нижняя шестерня вращается вокруг оси и заставляет вращаться верхнюю, а верхняя, перекатываясь по рейке 9, перемещает тягу 8 вдоль рейки и вместе с тягой нижняя шестерня вынуждена перекатываться по червяку. При любых угловых перемещениях кулисы нижняя шестерня находится в зацеплении с червяком, но не одной постоянной, а переменными точками. Изменение величины проекции расстояния между тягой и осью вращения кулисы на горизонталь компенсируется перекатыванием точки сцепления червяка и шестерни. Общей частью механизмов фиг. 5 и фиг. 6 является качающаяся направляющая, известная как качающийся рычаг в кулачковых механизмах. Применение кулачкового или кулисного механизмов в приводе равнозначно: главное - придать тяге и секциям -различную скорость движения при рабочем и холостом ходе при постоянной скорости вращения кулисного колеса 12. Кулисный механизм в приводе выглядит предпочтительнее ввиду большей величины амплитуды колебаний. Различие скоростей рабочего и холостого хода объясняется тем, что при перемещениях кулисы из одного крайнего положения в другое, кулисное колесо проходит за один оборот разные внутренний - а, и наружный - о^ углы. При этом внутренний угол всегда меньше наружного. Соотношение этих углов влияет на соотношение скоростей рабочего и холостого хода кулисы, а вместе с ней центральной и машущих секций крыла. 5 10 15 20 25 30 35 40 45 Редуктор 13 введен в орнитоптер для 50 приведения в соответствие скорости вращения кулисного колеса 12 и двигателя 14 с периодом колебаний крыла - маятника. К верхней части корпуса трапеции прикреплена подвесная система пилота 15. 55 Орнитоптер работает следующим образом. В достартовом режиме, когда скорость набегающего потока воздуха равна нулю, центральная секция 1 и машущие секции 2, размещенные на основании кры 10 ла - маятника 3, находятся под действием только сил тяжести, а центр тяжести размещен выше осей привеса, поэтому секции находятся в состоянии неустойчивого равновесия и склонны к заваливанию. Заваливанию секций препятствует сила упругих элементов 4, которые стремятся удержать секции в горизонтальном положении и уменьшить величину заваливания. В стартовом режиме при разбеге по склону горы на центральной и машущих секциях крыла появляется подъемная сила, превосходящая по величине силы тяжести секций, и секции приобретают состояние устойчивого равновесия. После отрыва от склона горы пилот, плавно увеличивая амплитуду колебаний секций, вводит.орнитоптер в режим машущего полета. В стартовом режиме по горизонтали с началом машущих движений на машущих секциях появляются подъемная сила и сила тяги, но подъемная сила еще недостаточна для отрыва от горизонтали. Сила тяги толкает орнитоптер в направлении движения и пилот ногами помогает осуществить рдзбег. Для уменьшения сил сопротивления пилот трапецией 5 уменьшает угол атаки центральной секции и орнитоптер набирает скорость необходимую для отрыва от горизонтали. При увеличении угла атаки набегающий поток воздуха создает на центральной и машущих секциях подъемную силу и орнитоптер взлетает. Изменяя угол атаки, увеличивая или уменьшая его, пилот производит машущий полет с набором высоты,горизонтальный или со снижением. Снижение можно производить и при планирующем полете. В любом режиме полета - машущем или планирующем - подъемная сила центральной секции уравновешена подъемной силой машущих секций, центры приложения этих сил размещены выше осей привеса и все секции находятся в состоянии устойчивого равновесия. Положение устойчивого равновесия обеспечивается регулированием угла атаки центральной секции, поворачивая ее вокруг оси верхнего шарнира качалки 6, вращением червяка редуктора 7. При планировании с минимальным снижением машущие секции занимают горизонтальное положение, а планирование с приподнятыми машущими секциями увеличивает скорость снижения без увеличения горизонтальной скорости, что может пригодиться пилоту для снижения по крутой траектории, а, возвратив редуктором машущие секции об 11 26735 ратно в горизонтальное положение, производить нормальную посадку. Таким образом, пилот может производить снижение как по пологой, так и по крутой траектории, не превышая расчетную горизонтальную скорость. Машущие движения крыла - маятника обеспечиваются возвратно-поступательным перемещением центральной секции тягой 8. Когда тяга 8 перемещает центральную секцию вверх, она качалкой 6 поворачивает основание крыла - маятника вокруг оси привеса, а основание перемещает машущие секции 2 вниз и одновременно смещает их наружу, так как несущие поверхности машущих секций размещены выше осей привеса на величину равную 0,1-0,3 их длины. За счет такого размещения машущих секций их крутящий момент возрастает от минимальной величины в верхнем положении до максимальной в нижнем. Промежуточную величину крутящего момента машущая секция имеет в горизонтальном положении; когда крутящие моменты центральной секции с плечом X и машущих секций с плечем І 2 уравновешивают друг друга, тогда машущие секции в совокупности с центральной преобазованы в маятник и занимают положение устойчивого равновесия (см. фиг. 2). Если бы машущая секция при переходе к планирующему полету остановилась в верхнем положении, то расстояние от оси привеса до конца машущей секции станет 11( ее крутящий момент будет меньше крутящего момента сил центральной секции и тогда центральная секция вернет машущую в горизонтальное положение. Если она остановилась бы в нижнем положении с расстоянием от оси привеса до конца машущей секции равном )3, тогда крутящий момент сил, действующих на машущие секции, стал бы больше крутящего момента центральной секции, и тогда машущие секции вернули бы все секции в положение устойчивого равновесия. Тем более гарантирован возврат машущих секций из любого положения в горизонтальное при наличии упругих элементов 4, так как возвращающаяся сила их всегда направлена к положению устойчивого равновесия. Действие обеих возвращающихся сил крыла - маятника и упругого элемента совпадает по времени и направлению действия. Случайные колебания секций, возникающие от неравномерности рывков набегающего потока воздуха, гасятся упругой связью машущих секций с упругими элементами, так как они работают как амортизаторы. 5 10 15 20 25 30 35 40 45 50 55 12 Для перехода от машущего полета к планирующему и принудительного возврата машущих секций в горизонтальное положение пилот перемещает тягу 8 направляющим 9 и 10 вращением винта 10 (см.фиг. 5) или червяка 10 (см. фиг. 6) в нейтральное положение НП, которое совпадает с осью вращения кулисы 11. Тогда расстояние между тягой 8 и осью вращения кулисы НП будет равно нулю, проекция этого расстояния на вертикаль тоже равна нулю и возвратно переменное поступательное перемещение тяги 8, центральной, а вместе с ними и машущих секций, будет прекращено, несмотря на продолжающееся вращение кулисного колеса 12, редуктора 13 и двигателя 14. Таким образом, при планирующем полете возврату машущих секций в горизонтальное положение способствуют крыло маятник и упругий элемент как два маятника и воздействие пилота на механизм плавного изменения амплитуды колебаний путем уменьшения амплитуды колебаний до нуля. Пилот размещен в подвесной системе 15, с помощью гибких валиков управляет механизмами и, изменяя положение своего тела относительно ручки управления трапеции, маневрирует орнитоптером. Для перехода от планирующего полета к машущему крыло - маятник необходимо раскачать до определенной амплитуды колебаний. При этом, двигатель 14 через редуктор 13 вращает с постоянной скоростью кулисное колесо 12 и заставляет перемещаться кулису 11 относительно ее центра вращения из одного крайнего положения в другое. Колесо описывает разные внутренний - а, и наружный - а2 углы и пропорционально величине этих углов соответствует скорость рабочего и холостого хода кулисы. Пилот, вращая винт 10 (фиг. 5) или червяк 10 (фиг. 6), по направляющей 9 перемещает тягу 8 вдоль кулисы, и увеличивает расстояние между тягой и осью вращения кулисы НП от нуля до необходимой ему величины. Соответственно величине этого расстояния возрастает его проекция на вертикаль, которая и определяет величину амплитуды колебаний тяги. Направляющая 9 передает движение центральной секции, придавая тяге 8 угол относительно центра вращения тяги 0, соответствующий углу атаки центральной секции. Возвратно поступательные движения центральной секции передаются качалкой 6 основанию крыла - маятника 3 и поворачивают его вокруг оси привеса попеременно то в од 13 26735 ' ну, то в другую стороны, а вместе с основанием поворачивается и машущая секция 2 Машущие секции 2, левая и правая одновременно, совершают машущие вращательные движения o6paTHbfe направлению возвратно поступательного движения центральной секции 1 Если центральная секция двигается вверх, то машущие секции, поворачиваясь вокруг оси привеса, обе одновременно идут вниз и наоборот, при этом сохраняется закономерность для машущих секций: холостой ход вверх медленно, рабочий ход вниз - быстрее Для обеспечения движения машущих секций в заданном режиме кулиса должна перемещаться при рабочем ходе кулисы вниз медленно, а при холостом ходе вверх - быстрее. Возникает противоречие в том, что для холостого хода машущей секции используется рабочий ход кулисы и наоборот, холостой ход кулисы для машущей секции используется как рабочий. Это противоречие устраняется работой упругих элементов 4, которые аккумулируют энергию при отклонении машущей секции от горизонтали и возвращают энергию при обратном направлении движения секции. Кинетическая энергия машущей секции при перемене направления движения затрачивается на растяжение (или сжатие) упругого элемента, а не на образование усталостных напряжений. Упругий элемент работает как аккумулятор энергии, амортизатор, возвращатель секции в горизонтальное положение и ускоритель машущих движений одновременно. Движение машущих секций крыла - маятника ускоренное действием энергетического маятника обеспечивает естественную смену направления движения и устраняет борьбу с инерцией движения машущих секций. 5 10 15 20 25 30 35 40 Размещение несущих поверхностей машущих секций выше осей привеса на величину равную 0,1-03 их длины влияет на характер движения воздушного потока. 45 Так как ось вращения размещена вне U плоскости машущей секции, то секция относительно оси вращения становится тангенциальной, и поэтмоу углы р, и рг, образованные линиями балки секции и касательной к траектории движения конца секции, становятся разными и не равны 90 градусов. Если ось вращения размещена в плоскости секции, то углы равны 90 градусов, секция является радиальной и разбрасывает воздушный поток. Тангенциальная машущая секция при движении вниз подсасывает воздух из-за ометаемой плоскости и создает под секцией дополнительный подпор, а при движении вверх воздушный поток сбегает с нее и уменьшает сопротивление подъему секции. Энергетическая эффективность предложенного орнитоптера выражена уменьшением энергозатрат по следующим причинам: 1) устранена борьба двигателя с иыерцией машущих секций за счет преобразования центральной и машущих секций в крыло - маятник путем размещения машущих секций выше осей привеса; 2) уменьшена нагрузка на двигатель за счет увеличения частоты свободных колебаний путем уменьшения величины периода колебаний крыла - маятника; 3) уменьшена нагрузка на двигатель путем плавного изменения амплитуды колебаний от нуля до максимальной возможной величины; 4) уменьшена нагрузка на двигатель путем аккумулирования энергии движения машущих секций упругими элементами и возвращении ее при обратном движении; 5) уменьшены силы сопротивления движению машущих секций при их подъеме за счет использования в приводе кулисного механизма; 6) нет крутящих моментов, компенсируемых работой двигателя, за счет уравновешивания машущих секций центральной в положении устойчивого равновесия. 26735 Фиг. 1 Фиг 3 26735 0,1 ОД и 0,4 OS o,7 юэ 08 Фиг? 0,4 1,0 Г Упорядник Техред М Келемеш Коректор М. Самборська Замовлення 527 Тираж Підписне Державне патентне відомство України, 254655, ГСП, Київ-53, Львівська пл , 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул. Гагаріна, 101
ДивитисяДодаткова інформація
Автори англійськоюP'iatyshev Oleksii Robertovych, P'iatyshev Robert Oleksandrovych
Автори російськоюПятышев Алексей Робертович, Пятишев Роберт Александрович
МПК / Мітки
МПК: B64C 33/00
Мітки: орнітоптер
Код посилання
<a href="https://ua.patents.su/18-26735-ornitopter.html" target="_blank" rel="follow" title="База патентів України">Орнітоптер</a>
Установка автоматичного пожежогасіння

Номер патенту: 11622
Опубліковано: 25.12.1996
Автори: Лапин Кузьма Іванович, Поздняков Костянтин Іванович, Кирилюк Анатолій Якович
МПК: A62C 35/00
Мітки: установка, пожежогасіння, автоматичного
Формула / Реферат:
Установка автоматического пожаротушения, содержащая установленное в линии подачи огнетушащей жидкости запорно-пусковое устройство, узел пуска, соединенный линией связи с пожарными извещателями, и секционный трубопровод с отводами, отличающаяся тем, что, с целью повышения эффективности тушения и снижения металлоемкости установки, каждая секция имеет один отвод, установленный на ее конце перпендикулярно трубопроводу, а диаметр трубы каждой...
Пристрій для знаходження сторінок в довідковому виданні
Номер патенту: 165
Опубліковано: 30.06.1998
Автор: Донець Михайло Анатолійович
МПК: B42F 21/00, B42D 9/00
Мітки: знаходження, пристрій, виданні, сторінок, довідковому
Формула / Реферат:
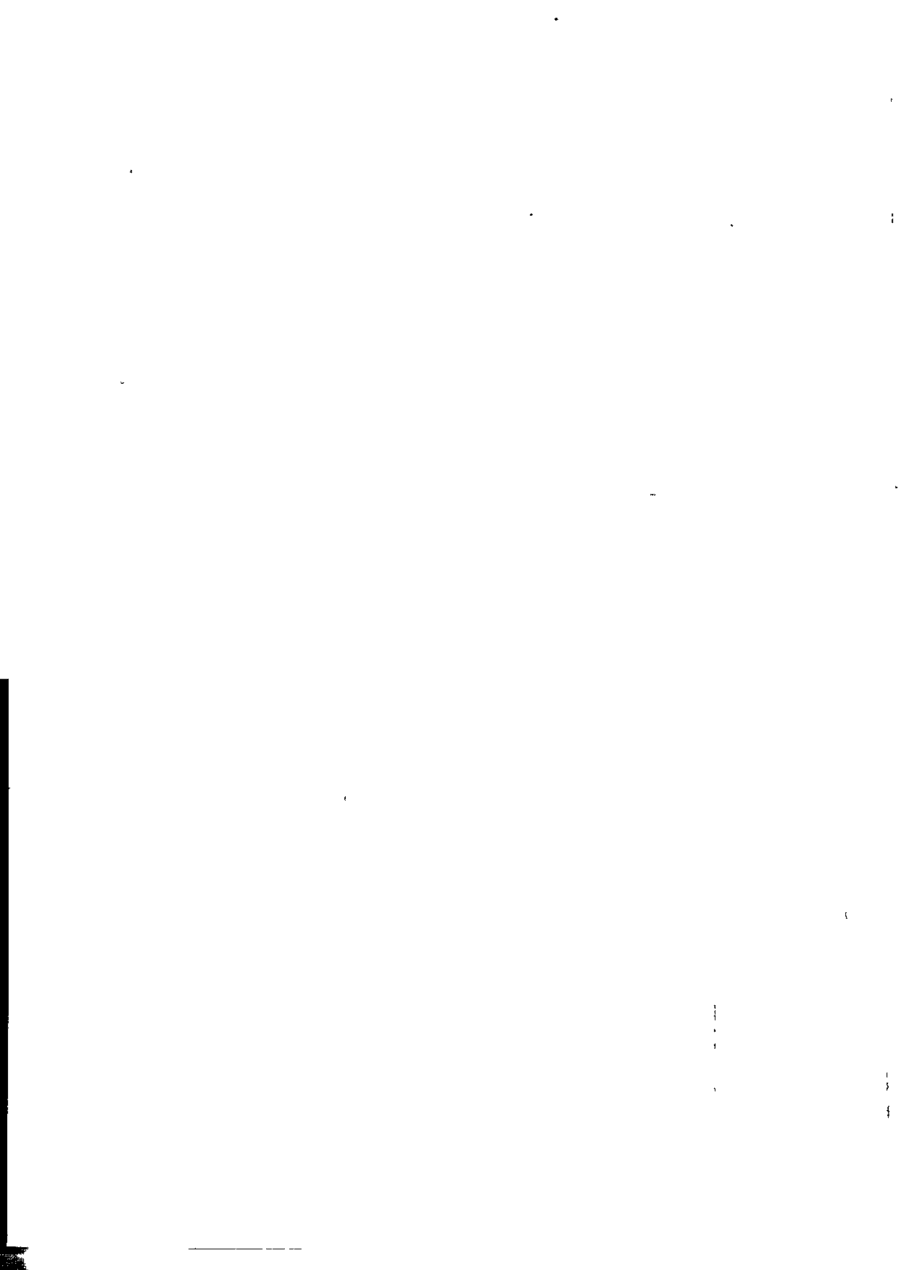
Устройство для нахождения страниц в справочном издании, содержащее указатели секций в виде выступов с индексами, закрепленные у края страниц в начале секций, а также индексы страниц внутри секции, размещенные в начале секции, отличающееся тем, что у края страниц секций напротив соответствующих индексов страниц закреплены указатели в виде выступов без индексов.
Якір дискового моментного двигуна постійного струму
Номер патенту: 2140
Опубліковано: 26.12.1994
Автори: Коваленко Анатолій Омелянович, Черепаняк Мирон Володимирович, Завгородній Віктор Дмитрович
МПК: H02K 26/00
Мітки: постійного, моментного, якір, дискового, двигуна, струму
Формула / Реферат:
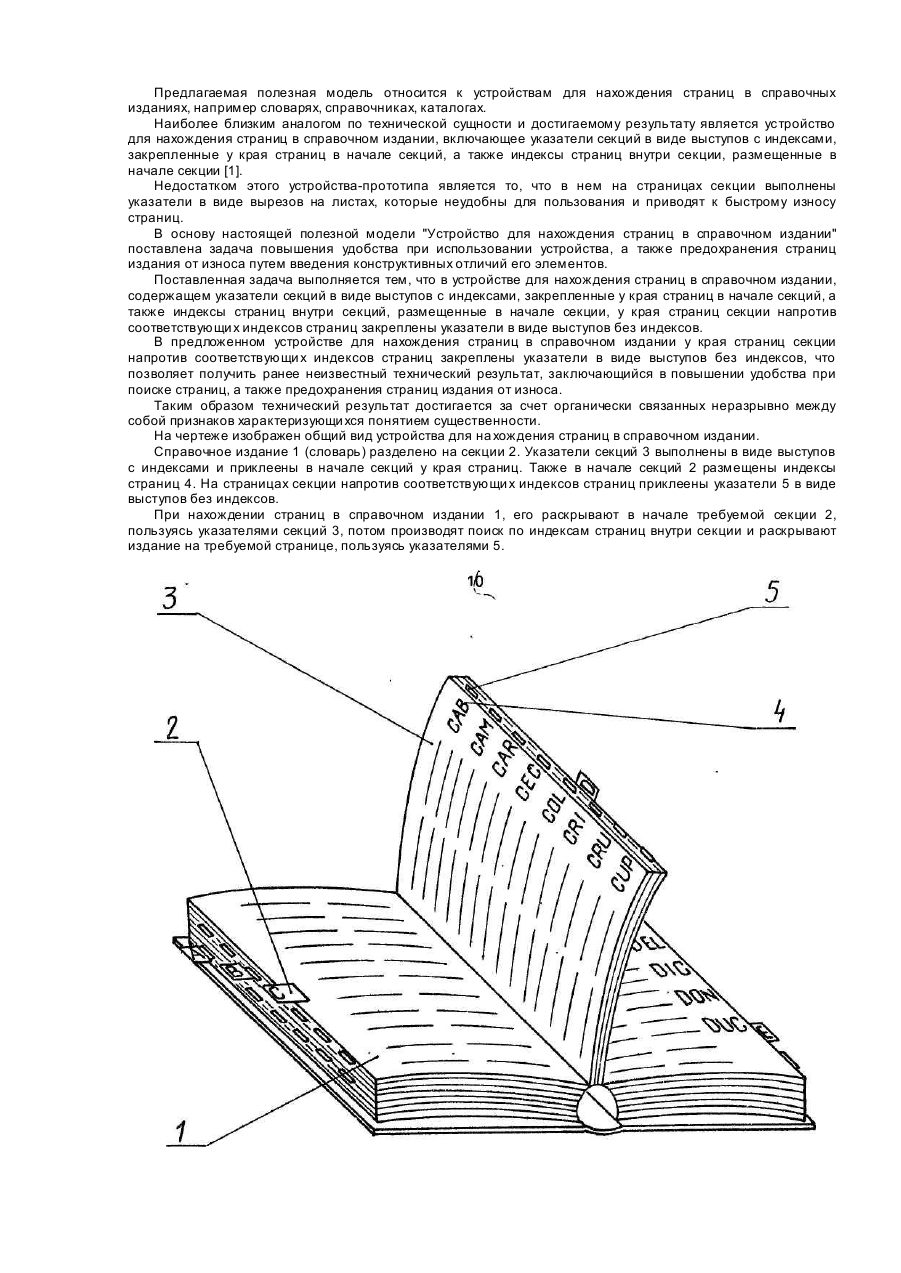
Якорь дискового моментного двигателя постоянного тока по авт. св. № 1192045, отличающийся тем, что, с целью уменьшения аксиальной длины якоря, каждая секция якоря выполнена из двух идентичных катушек, наложенных друг на друга так, что их геометрические оси направлены в противоположные стороны, а начала катушек соединены между собой в окне секции.
Спосіб монтажу механізованого кріплення очисних комплексів
Номер патенту: 987
Опубліковано: 30.12.1993
Автори: Нікіфоров Олександр Іванович, Картавих Геннадій Йосипович
МПК: E21D 23/00
Мітки: спосіб, очисних, комплексів, монтажу, кріплення, механізованого
Формула / Реферат:
Способ монтажа механизированной крепи очистных комплексов, включающий проведение и крепление монтажной камеры, доставку секций крепи к монтажной камере, поочередную транспортировку секций по монтажной камере, разворот и установку в проектное положение, подсоединение секции к гидросистеме комплекса и распор, отличающийся тем, что, с целью экономии крепежных материалов при одновременном сокращении сроков работ по монтажу, монтажную камеру...
Механізоване кріплення сполучення
Номер патенту: 23903
Опубліковано: 31.08.1998
Автори: Гайсинович Олександр Абович, Распопов Володимир Іванович, Мельников Вячеслав Афанасійович, Косарєв Василь Васильович, Андреєв Георгій Володимирович
МПК: E21D 11/36, E21D 23/00
Мітки: кріплення, сполучення, механізоване
Формула / Реферат:
Механизированная крепь сопряжения, включающая две спаренные секции - рамы, содержащие верхняки, основания, гидростойки с шарнирными опорами, и механизм перемещения секций-рам, одна из которых связана с приводом лавного конвейера, отличающаяся тем, что секции-рамы выполнены различной длины, а привод лавного конвейера размещен на основании короткой секции, при этом механизм перемещения секций-рам выполнен в виде якорной секции, установленной с...
Попередній патент: Засіб для збільшення виділення тgf-бета в головний мозок та для інгібування нейротоксичності, яка проводиться бета -амілоїдними пептидами
Наступний патент: Спосіб ремонту вогнетривкого тіла на основі оксиду і порошкоподібна суміш для ремонту вогнетривких тіл
Випадковий патент: Багатоканальний газоаналітичний технологічний комплекс