Спосіб стабілізації положення рухомого вузла суперпрецизійної аеростатичної напрямної
Номер патенту: 99943
Опубліковано: 25.10.2012
Формула / Реферат
Спосіб стабілізації положення рухомого вузла суперпрецизійної аеростатичної напрямної, який включає формування величин опорних зазорів під датчиками величин зазорів, які на дискретах стабілізації положення рухомого вузла відповідають його незміщеному положенню відносно площини стабілізації, коректування положення рухомого вузла на дискретах стабілізації в процесі його робочого переміщення,який відрізняється тим, що в рухомому вузлі суперпрецизійної аеростатичної напрямної закріплюють не менше трьох блоків датчиків величин зазорів, кожний з яких включає не менше трьох датчиків величини зазору, розташованих по вершинах рівних рівнобічних трикутників на мінімальних між собою відстанях, при цьому сторона рівнобічного трикутника дорівнює великій дискреті стабілізації положення рухомого вузла, а мала дискрета стабілізації дорівнює половині сторони рівнобічного трикутника, по рівняннях прямих, згладжуючих верхню грань основи суперпрецизійної лінійної напрямної по сліду переміщення перших і других датчиків величин зазорів блоків датчиків, а також по рівняннях прямих, які згладжують цю поверхню по сліду переміщення третіх датчиків величин зазорів блоків датчиків, центри основ перших і других датчиків кожного блока датчиків встановлюють на паралельні між собою прямі, а центри основ третіх датчиків встановлюють на прямі, які паралельні прямим, на яких встановлені центри основ перших і других датчиків, в вихідному для переміщення положенні рухомого вузла вимірюють і оцінюють величини зазорів під другими датчиками блоків датчиків, а по оцінках цих величин зазорів рухомий вузол встановлюють у незміщене положення відносно площини стабілізації, в вихідному для переміщення і незміщеному положенні рухомого вузла відносно площини стабілізації вимірюють, оцінюють і встановлюють величини зазорів під третіми датчиками величин зазорів, які дорівнюють величинам опорних зазорів на першій малій дискреті стабілізації положення рухомого вузла відносно площини стабілізації, а також вимірюють, оцінюють і приймають як опорні величини зазорів під першими датчиками величин зазорів блоків датчиків на першій великій дискреті стабілізації, по оцінках величини переміщення рухомого вузла лінійним дискретним фільтром Калмана його послідовно переміщують на малі дискрети стабілізації, на кожній малій дискреті стабілізації під другими датчиками величин зазорів встановлюють величини зазорів, які, в залежності від номера дискрети стабілізації, дорівнюють величинам відповідних опорних зазорів під першими або третіми датчиками величин зазорів, виміряних на попередній дискреті стабілізації і встановлюють рухомий вузол на поточній дискреті стабілізації у незміщене положення відносно площини стабілізації, отримують величини опорних зазорів, по яких коректують положення рухомого вузла на кожній малій дискреті стабілізації в процесі його робочого переміщення.
Текст
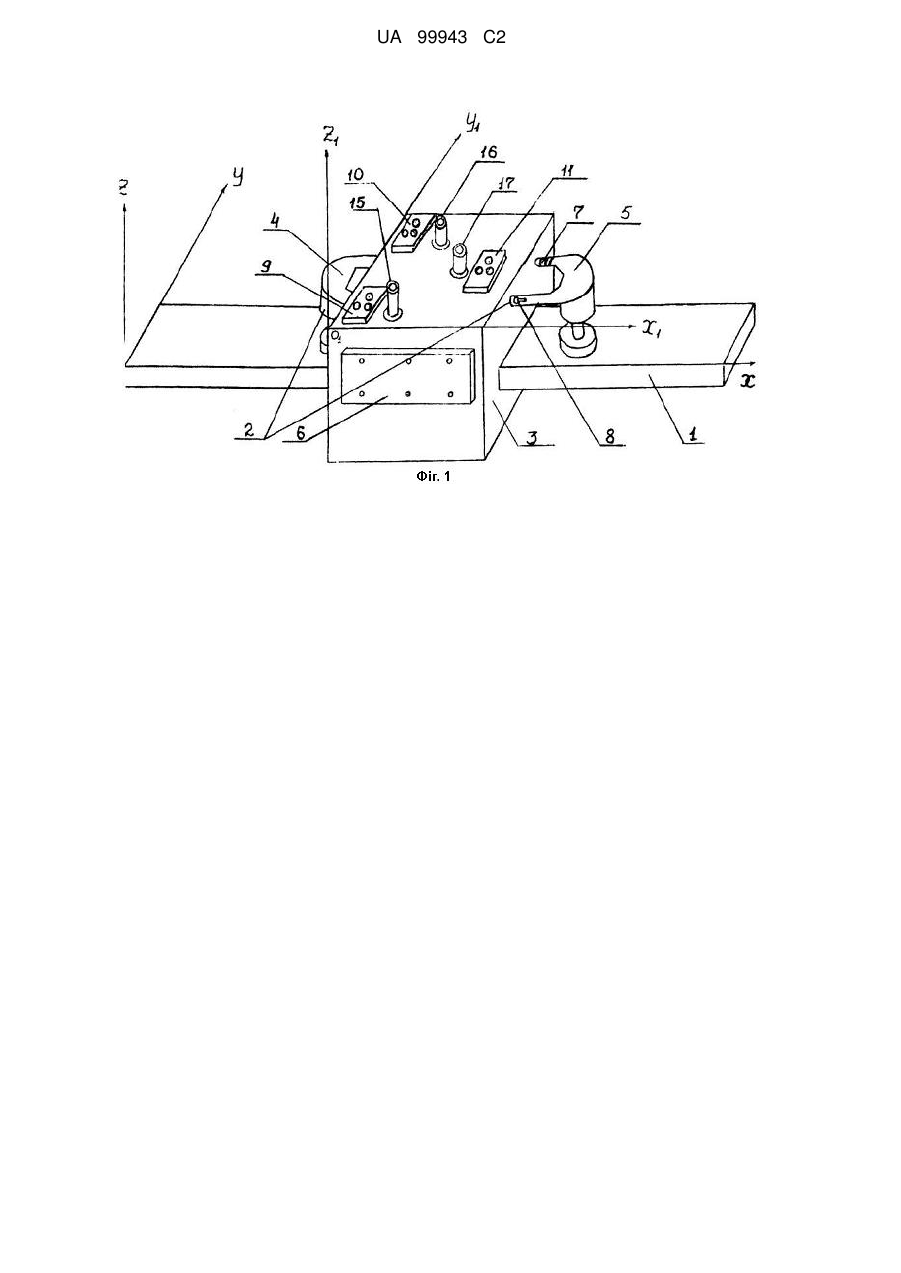
Реферат: Винахід належить до верстатобудування і може використовуватися при конструюванні напрямних для верстатів особливо високої точності. Спосіб стабілізації положення рухомого вузла суперпрецизійної лінійної напрямної, який включає формування величин опорних зазорів під датчиками величин зазорів, які на дискретах стабілізації положення рухомого вузла відповідають його незміщеному положенню відносно площини стабілізації, коректування положення рухомого вузла на дискретах стабілізації в процесі його переміщення. Згідно з винаходом, в рухомому вузлі напрямної закріплюють не менше трьох блоків датчиків величин зазорів, кожний з яких включає не менше трьох датчиків величини зазору, розташованих по вершинах рівних рівнобічних трикутників на мінімальних між собою відстанях. Сторона рівнобічного трикутника дорівнює величині дискрети стабілізації положення рухомого вузла, а мала дискрета стабілізації дорівнює половині сторони рівнобічного трикутника. По рівняннях прямих, згладжуючих верхню грань основи напрямної по сліду переміщення перших і других датчиків величин зазорів блоків датчиків, а також по рівнянням прямих, які згладжують цю поверхню по сліду переміщення третіх датчиків величин зазорів блоків датчиків, центри основ перших і других датчиків кожного блока датчиків встановлюють на паралельні між собою прямі, а центри основ третіх датчиків встановлюють на прямі, які паралельні прямим, на яких встановлені центри основ перших і других датчиків. Вимірюють, оцінюють і приймають як опорні величини зазорів під датчиками величин зазорів блоків датчиків на дискретах стабілізації. По оцінках величини переміщення рухомого вузла лінійним дискретним фільтром Калмана його послідовно переміщують на малі дискрети стабілізації. Отримують величини опорних зазорів, по яких коректують положення рухомого вузла на кожній малій дискреті стабілізації в процесі його робочого переміщення. Винахід забезпечує стабілізацію положення рухомого вузла з особливо високою точністю. UA 99943 C2 (12) UA 99943 C2 UA 99943 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до верстатобудування і може використовуватися при конструюванні напрямних для верстатів особливо високої точності. 5 Відома аеростатична напрямна (див. патент України № 14905 А М. кл. F 16 С 32/06 Бюл. № 3 від 30.06.97 р. "Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення"), що працює в статичному і динамічному режимах. Спосіб, який реалізований в відомій аеростатичній напрямній, вибраний за прототип. Як відомо, плоскі поверхні класу точності "0" досягають неплоскістності поверхні до 4 мкм на один метр довжини поверхні. Тому точність стабілізації положення рухомого вузла аеростатичної напрямної залежить від величини дискрети стабілізації рухомого вузла, тобто для підвищення точності стабілізації її необхідно зменшувати. Окрім того, для досягнення високої точності стабілізації рухомий вузол треба точно встановлювати на дискрету стабілізації його положення і з високою точністю вимірювати величини опорних зазорів, які відповідають незміщеному положенню рухомого вузла аеростатичної напрямної відносно нерухомої у просторі площини (площини стабілізації). Задача, що вирішується, полягає у такому удосконаленні способу стабілізації положення рухомого вузла суперпрецизійної аеростатичної напрямної відносно нерухомої у просторі площини, який дозволяє не менш як у двічі скоротити дискрету стабілізації положення рухомого вузла аеростатичної напрямної, точно встановлювати рухомий вузол на дискрету стабілізації шляхом оцінювання величини його переміщення лінійним дискретним фільтром Калмана, вимірювати і отримувати асимптотично незміщені оцінки величин зазорів під датчиками величин зазорів, що дозволяє точно встановлювати під цими датчиками величини опорних зазорів. Таким чином за рахунок зменшення дискрети стабілізації і уведення згаданих вище додаткових операцій стабілізація положення рухомого вузла здійснюється з особливо високою точністю. Для вирішення цієї задачі в способі стабілізації рухомого вузла суперпрецизійної аеростатичної напрямної, який включає формування величин опорних зазорів під датчиками величин зазорів, які на дискретах стабілізації положення рухомого вузла відповідають його незміщеному положенню відносно площини стабілізації, коректування положення рухомого вузла на дискретах стабілізації в процесі його робочого переміщення, згідно з винаходом, в рухомому вузлі суперпрецизійної аеростатичної напрямної закріплюють не менше трьох блоків датчиків величин вершинам рівних рівнобічних трикутників на мінімальних між собою відстанях, при цьому сторона рівнобічного трикутника дорівнює великій дискреті стабілізації положення рухомого вузла, а мала дискрета стабілізації дорівнює половині сторони рівнобічного трикутника, по рівняннях прямих, згладжуючих верхню грань основи суперпрецизійної аеростатичної напрямної по сліду переміщення перших і других датчиків величин зазорів блоків датчиків, а також по рівняннях прямих, які згладжують цю поверхню по сліду переміщення третіх датчиків величин зазорів блоків датчиків, центри основ перших і других датчиків кожного блока датчиків встановлюють на паралельні між собою прямі, а центри основ третіх датчиків встановлюють на прямі, які паралельні прямим, на яких встановлені центри основ перших і других датчиків, в вихідному для переміщення положенні рухомого вузла вимірюють і оцінюють величини зазорів під другими датчиками блоків датчиків, а по оцінках цих величин зазорів рухомий вузол встановлюють у незміщене положення відносно площини стабілізації, в вихідному для переміщення і незміщеному положенні рухомого вузла відносно площини стабілізації вимірюють, оцінюють і встановлюють величини зазорів під третіми датчиками величин зазорів, які дорівнюють величинам опорних зазорів на першій малій дискреті стабілізації положення рухомого вузла відносно площини стабілізації, а також вимірюють, оцінюють і приймають як опорні величини зазорів під першими датчиками величин зазорів блоків датчиків на першій великій дискреті стабілізації, по оцінках величини переміщення рухомого вузла лінійним дискретним фільтром Калмана його послідовно переміщують на малі дискрети стабілізації, на кожній малій дискреті стабілізації під другими датчиками величин зазорів встановлюють величини зазорів, які, в залежності від номера дискрети стабілізації, дорівнюють величинам відповідних опорних зазорів під першими або третіми датчиками величин зазорів, виміряних на попередній дискреті стабілізації і встановлюють рухомий вузол на поточній дискреті стабілізації у незміщене положення відносно площини стабілізації, отримують величини опорних зазорів, по яких коректують положення рухомого вузла на кожній малій дискреті стабілізації в процесі його робочого переміщення. Причинно-наслідковий зв'язок між сукупністю суттєвих ознак винаходу, що заявляється, з технічним результатом, що досягається, полягає у наступному. Суперпрецизійна лінійна напрямна (Фіг.1) включає основу 1, по якій кроковим п'єзоелектричним двигуном 2 (див. патент України № 36957 А, бюл. № 3 від 16.04.2001 р. "П'єзоелектричний двигун") пересувається рухомий вузол 3 аеростатичної напрямної. На 1 UA 99943 C2 5 10 15 20 25 30 рухомому вузлі 3 встановлені три блоки: перший 9, другий 10, третій 11 датчиків величин зазорів. В кожному блоці датчиків 9, 10, 11 величин зазорів встановлюють по три датчики величини зазора: перший 12, другий 13 і третій 14 датчик величини зазора (Фіг. 3), наприклад, ємнісного типу. Отже, вимірюють величини зазорів між основами цих датчиків і поверхнею ємнісного типу. Отже, вимірюють величини зазорів між основами цих датчиків і поверхнею основи 1 аеростатичної напрямної. При цьому датчики величин зазорів 12, 13, 14 в кожному блоці 9, 10, 11 датчиків розташовані по вершинах однакових рівнобічних трикутників на мінімальних відстанях. Таким чином, сторона рівнобічного трикутника дорівнює великій дискреті стабілізації ℓ положення рухомого вузла 3 відносно плоскості стабілізації (див. патент України № 14905 А від 04.03.97 р. "Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення". Мала дискрета стабілізації дорівнює половині сторони рівнобічного трикутника (по напрямку переміщення рухомого вузла), що вдвічі зменшує дискрету стабілізації, як буде показано далі. Отже, центри основ перших датчиків 12 і других датчиків 13 блоків датчиків 9, 10, 11 встановлені на паралельні прямі (див. там же), що дозволяє здійснювати стабілізацію положення рухомого вузла 3 відносно площини стабілізації з великою дискретою стабілізації ℓ. Для того, щоб удвічі зменшити дискрету стабілізації рухомого вузла і стабілізувати його положення з малою дискретою стабілізації ℓ1=ℓ/2 рухомий вузол 3 переміщують у вихідне для переміщення положення і встановлюють його у незміщене відносно площини стабілізації положення. З вихідного положення рухомий вузол переміщують на задану відстань L, стабілізуючи його положення з великою дискретою стабілізації ℓ по вимірюванні величин опорних зазорів під першими датчиками 12 блоків датчиків 9, 10, 11, які на наступній дискреті стабілізації встановлюються під другими датчиками 13. Будують рівняння прямих, згладжуючих поверхню основи аеростатичної напрямної по сліду переміщення перших датчиків 12 блоків датчиків: 1 1 1 3 3 3 (1) y1 k1 x b1 ; y12 k12 x b12 ; y1 k1 x b1 . Рухомий вузол встановлюють у вихідне положення в незміщене положення і зміщують його на величину малої дискрети стабілізації ℓ1. Вимірюють величини зазорів під третіми датчиками 14 блоків датчиків і приймають їх як опорні. З вихідного положення рухомий вузол переміщують на відстань L+ℓ1, стабілізуючи його положення з великою дискретою стабілізації ℓ, але по вимірюваннях величин опорних зазорів під третіми датчиками 14 блоків датчиків. Будують рівняння прямих, згладжуючих поверхню аеростатичної напрямної по сліду переміщення третіх датчиків 14: 1 1 1 2 2 2 3 3 3 y 3 k 3 x b 3 ; y 3 k 3 x b3 ; y 3 k 3 x b3 . Якщо рівності: 35 40 45 50 (2) 1 1 2 3 3 2 3 3 1 1 (3) k 1 k 3 ; k12 k 3 ; k1 k 3 ; b1 b 3 ; b12 b3 ; b1 b3 виконуються, величини зазорів під третіми датчиками 14 на першій малій дискреті стабілізації відповідають незміщеному положенню рухомого вузла і можуть використовуватися як опорні. Так як рухомий вузол переміщується дискретно, це дозволяє на дискретах стабілізації отримувати асимптотично незміщені оцінки величин зазорів під датчиками величин зазорів (в перервах між двома суміжними переміщеннями). Якщо вибірка складає 800÷1000 вимірювань, оцінка величин зазорів незміщена, ефективна і переконлива. При величині зазору 20 мкм не перевищує 0,001 мкм, що дозволяє з особливо високою точністю встановлювати рухомий вузол у незміщене положення відповідно площини стабілізації. Для точного встановлення рухомого вузла на дискрету стабілізації величина його переміщення оцінюється лінійним дискретним фільтром Калмана, що виключає накопичення погрішності установки рухомого вузла 3 на дискрету стабілізації. Особливості застосування цього фільтра у даному випадку буде показана нижче. Винахід пояснюється кресленнями: Фіг. 1. Суперпрецизійна лінійна напрямна (загальний вигляд). Фіг. 2. Блок датчиків величин зазорів. Фіг. 3. Аеростатичний регулятор тиску у газовому шарі несучої плоскої аеростатичної опори. Фіг. 4. Рухомий вузол аеростатичної напрямної. Фіг. 5. Функціональна схема пристрою стабілізації положення рухомого вузла суперпрецизійної аеростатичної напрямної. Фіг. 6. Принцип стабілізації положення рухомого вузла відносно плоскості стабілізації. Фіг. 7. Величина відхилення рухомого вузла від площини стабілізації на дискреті стабілізації. 2 UA 99943 C2 5 10 15 20 25 30 35 40 45 50 55 Пристрій стабілізації положення рухомою елемента суперпрецизійиої аеростатичної напрямної включає (Фіг. 1) основу 1, яка являє собою балку прямокутного перерізу, по якій п'єзоелектричними двигунами 2 переміщується рухомий вузол 3. Верхня і нижня стінки рухомого вузла 3 з відповідними гранями основи 1 утворюють дві плоскі аеростатичні опори, які несуть рухомий вузол 3. Бокові стінки рухомого вузла 3 також утворюють з боковими гранями основи аеростатичної напрямної плоскі аеростатичні опори. Переміщення рухомого вузла 3 здійснюється кроковим п'єзоелектричним двигуном 2, який оснащений вимірювачами кроку мікропереміщення та інваріантний до траєкторії переміщення рухомого вузла. П'єзоелектричний двигун включає штовхач прямого ходу 4, штовхач зворотного ходу 5 і пристрій 6 управління штовхачами. Штовхачі 4 і 5 забезпечують переміщення рухомого вузла у прямому і зворотному напрямку відповідно. Одне плече кожного штовхача 4 і 5 з установленим у ньому п'єзостовпом 7 (Фіг. 1) прикріплено до рухомого вузла 3, а друге, в торець якого встановлений датчик 8, мікропереміщення рухомого вузла 3. Пристрій 6 управління штовхачами 4 і 5 забезпечує крокове переміщення рухомого вузла 3 з величиною кроку мікропереміщення, який вимірюється і регулюється у прямому і зворотному напрямку. Величина m(j) j-гo крока мікропереміщення рухомого вузла 3 обчислюється як різниця величин зазорів Zk(j) і Zn(j) під датчиком 8 величини кроку мікропереміщення рухомого вузла 3 після закінчення кроку мікропереміщення і до початку його переміщення. На верхній стінці рухомого вузла 3 симетрично відносно його сторін встановлені блоки датчиків перший 9, другий 10, третій 11. В кожному блоці датчиків (Фіг.2) встановлені перший датчик 12, другий датчик 13, третій датчик 14 величин зазорів між основами датчиків і верхньою межею основи напрямної. Датчики встановлені по вершинах рівнобічного трикутника на одних і тих же відстанях у кожному блоці датчиків. Відстані між центрами основ першого датчика 12 і другого датчика 13 дорівнює великій дискреті стабілізації ℓ положення рухомого сегмента 3. Відстані між центрами основ першого і третього, третього і другого датчиків по напрямку переміщення рухомого вузла 3 дорівнюють половині сторони рівнобічного трикутника, по вершинах якого вони встановлені. Мала дискрета стабілізації рухомого вузла ℓ1 дорівнює цим відстаням. На верхній стінці рухомого вузла симетрично відносно блоків датчиків встановлені аеростатичні регулятори перший 15, другий 16, третій 17 положення рухомого вузла 3 (регулятори тиску в газовому шарі несучої плоскої аеростатичної опори). Ці регулятори додатково можуть встановлюватися і на нижній основі рухомого вузла 3. В цьому випадку вони встановлюються попарно навпроти один одного по вертикальних осях симетрії. Конструкція аеростатичного регулятора положення рухомого вузла представлена на Фіг. 3. В корпусі 18 регулятора розміщений п'єзоелектричний двигун (п'єзостовп) 19 з регулювальною голкою 20 для зміни площі поперечного перерізу підвідного каналу 21 жиклера 22 подачі газу в зазор несучої плоскої аеростатичної опори. Регулювальним гвинтом 23, який ізольований ізолятором 24, встановлюється початкова величина площі поперечного перерізу підвідного каналу 21 жиклера 22. Пружина 25 утримує п'єзостовп 19 в регулювальному гвинті 23 і ущільнює шви між дисками п'єзостовпа 19. Аеростатичні регулятори 15, 16, 17 положення рухомого вузла забезпечують зміну відносного тиску на виході підхідного каналу жиклера від критичного рd/px=0,528 до pd/px=1. Силове замикання рухомого вузла 3 в напрямку, який перпендикулярний напрямку переміщення цього рухомого вузла, здійснюється двома плоскими аеростатичними опорами, які утворюються боковими стінками 26 рухомого вузла 3 (Фіг. 4). Пристрій 27 стабілізації положення рухомого вузла 3 (Фіг. 5) забезпечує: 1. Установку перших 12 і других датчиків 13 блоків 9, 10, 11 датчиків на паралельні прямі, які паралельні площині стабілізації, а третіх датчиків 14 цих блоків датчиків на паралельні між собою прямі. 2. Установку основ кожного блока датчиків в площини, які паралельні між собою і паралельні площині стабілізації рухомого вузла напрямної. 3. Формування масиву опорних зазорів, які на дискретах стабілізації, що відповідають незміщеному положенню рухомого вузла 3 відносно площини стабілізації. 4. Формування на дискретах стабілізації сигналів управління, які на дискретах стабілізації забезпечують установлення рухомого вузла 3 у незміщене положення відносно площини стабілізації. 5. Оцінювання величини переміщення рухомого вузла лінійним дискретним фільтром Калмана. В склад пристрою 27 стабілізації рухомого вузла входять наступні функціональні елементи. 3 UA 99943 C2 5 10 15 20 25 30 35 40 45 50 55 Вимірювачі 28 величин зазорів під датчиками величин зазорів 12, 13, 14, які забезпечують у даному прикладі побудови пристрою (Zpaб.=20 мкм) вимірювання величин зазорів з середньоквадратичною похибкою 0,02 мкм. Цифровий блок 29, який забезпечує: 1. Прийом і перетворення в цифровий двійковий код вихідних напруг вимірювачів 28 величин зазорів. 2. Обчислювання асимптотично незміщених оцінок зазорів, що вимірюються. 3. Формування сигналів на аеростатичні регулятори 15, 16, 17 положення рухомого вузла при підготовці пристрою стабілізації до роботи. 4. Оцінку величини переміщення рухомого вузла 3 на дискретах його переміщення п'єзоелектричним двигуном 2 для точного установлення його на дискрету стабілізації. Як цифровий блок 29 може використовуватись комп'ютер, оснащений модулем уводувиводу даних для зв'язку з периферійними функціональними елементами. Операційні підсилювачі 30 забезпечують формування сигналів управління на аеростатичні регулятори 15, 16, 17 положення рухомого вузла 3 в процесі підготовки напрямної до роботи. Перемикачі 31 "більше-вимк.-менше" служать для зміни полярності сигналів управління на входах диференційних підсилювачів 32, що надходять з операційних підсилювачів 30. В положенні перемикача "більше" сигнал з виходу диференційного підсилювача, що надходить на аеростатичний регулятор положення рухомого вузла 3, викликає підвищення тиску на його виході, в положенні "менше" - зниження тиску на виході регулятора. Диференційні підсилювачі 32 змінюють підйомну силу аеростатичних регуляторів тиску в залежності від знака і величини сигналу неузгодження на їх входах, які визначаються напрямком і величиною відхилення поточних величин зазорів від відповідних величин опорних зазорів. Перемикач 33 "робота-вимк." підключає напруги опорних зазорів і вихідні напруги з вимірювачів величин зазорів через цифровий блок і виходи вимірювачів величин зазорів до входів диференційних підсилювачів 32. При цьому перші датчики 12, другі датчики 13 і треті датчики 14 першого блока 9, другого блока 10, третього блока 11 датчиків величин зазорів з'єднані з входами вимірювачів 28 величин зазорів, виходи вимірювачів 28 величин зазорів з'єднані з входами цифрового блока, входи штовхача 4 прямого ходу з'єднані з виходами пристрою 6 управління штовхачами, а його вихід з'єднаний з входом пристрою 6 управління штовхачами, входи штовхача 5 прямого ходу з'єднані з виходами пристрою 6 управління штовхачами, а його вихід з'єднаний з входом пристрою 6 управління штовхачами, виходи пристрою 6 управління штовхачами з'єднані з входами цифрового блока, а його вхід з'єднаний з виходом цифрового блока 29, входи операційних підсилювачів 30 з'єднані з виходами цифрового блока 29, виходи операційних підсилювачів 30 через перемикачі 31 "більше-вимк.менше" з'єднані з входами відповідних диференційних підсилювачів 32, перші входи диференційних підсилювачів 32 через перемикач 33 "робота-вимк." в положенні "робота" з'єднані з виходами опорних зазорів цифрового блока 29, другі входи операційних підсилювачів 32 через перемикач 33 "робота-вимк." в положенні "робота" з'єднані з виходами величин напруг поточних зазорів вимірювачів величин зазорів цифрового блока 29, виходи диференційних підсилювачів 32 з'єднані з п'єзостовпами 19 регуляторів тиску в газовому шарі суперпрецизійної аеростатичної напрямної. Спосіб стабілізації положення рухомого вузла суперпрецизійної аеростатичної напрямної включає наступну послідовність дій. Точність стабілізації положення рухомого вузла суперпрецизійної аеростатичної напрямної досягається наступним. 1. В рухомому вузлі 3 суперпрецизійної аеростатичної напрямної (Фіг. 4) симетрично відносно його сторін встановлюють три блоки: перший 9, другий 10, третій 11 датчиків величин зазорів. В кожному блоці 9, 10, 11 датчиків (Фіг. 2) встановлюють перший датчик 12, другий датчик 13 і третій датчик 14 величин зазорів між основами цих датчиків і верхньою гранню основи 1 напрямної. Датчики 12, 13, і 14 встановлюють по вершинах рівнобічного трикутника на одних і тих же мінімальних між собою відстанях в кожному блоці 9, 10, 11 датчиків величин зазорів. Відстані між центрами основ першого 12 і другого 13 датчиків величин зазорів дорівнюють великій дискреті ℓ стабілізації положення рухомого вузла 3. Відстані між центрами основ першого 12 і третього 14 датчиків, третього 14 і другого 13 датчиків по напрямку переміщення рухомого вузла 3 дорівнюють половині сторони рівнобічного трикутника, по вершинах якого вони встановлені. Мала дискрета ℓ стабілізації рухомого вузла дорівнює цим відстаням. 4 UA 99943 C2 5 10 15 На верхній стінці рухомого вузла 3 симетрично відносно блоків 9, 10, 11 датчиків встановлюють аеростатичні регулятори 15, 16, 17 положення рухомого вузла 3 (Фіг. 4). Пересувається рухомий вузол 3 кроковим п'єзоелектричним двигуном 2 (див. пристрій стабілізації положення рухомого вузла аеростатичної напрямної). 2. Установка центрів основ перших датчиків 12 і других датчиків 13 кожного з блоків 9, 10, 11 датчиків величин зазорів на паралельні між собою прямі. Установка центрів основ перших датчиків 12 і других датчиків 13 блоків 9, 10, 11 датчиків величин зазорів на паралельні між собою прямі виконується автономно і ґрунтується на наступній властивості способу стабілізації положення рухомого вузла 3 по опорних зазорах. Рухомий вузол 3 установлюють у вихідне для переміщення положення. Під другими датчиками 13 C1 , C 2 , C 3 , блоків 9, 10, 11 датчиків по їх асимптотично незміщених оцінках (тут і далі всі 2 2 2 виміри і установки величин зазорів будуть виконуватися по їх асимптотично незміщених оцінках (див. причинно-наслідковий зв'язок)) встановлюють величини зазорів, які дорівнюють розрахунковій величині зазору несучої плоскої опори. Припускають, що центри основ перших 12 і других 13 датчиків блоків датчиків лежать на паралельних прямих, відстані між центрами основ перших датчиків 12 і других датчиків 13 дорівнюють великій дискреті стабілізації ℓ (Фіг. 6). Збільшимо величину зазору Z 3 0 під першим датчиком 12 C 3 третього блока датчиків 10 на 1 1 Z. Рухомий вузол 3 переміщують з вихідного положення з дискретою стабілізації ℓ. Під другими 20 датчиками 13 величини зазорів установлюються в такій послідовності: під датчиком 13 C1 2 2 блока датчиків 10; під датчиком 13 C 3 блока датчиків 11. блока датчиків 9; під датчиком 13 C 2 2 На кожній дискреті стабілізації величина опорного зазору під датчиком 12 3 C1 буде збільшуватися на Z, а центри основ датчиків 12 і 13 блока 11 датчиків C 3 і C 3 лежать на 1 2 одній прямій. Кут нахилу цієї прямої до прямої, яка згладжує верхню грань основи 1 напрямної 25 30 по сліду датчиків 12 і 13 C 3 і C 3 визначається різницею висот цих датчиків відносно площини 1 2 стабілізації. Установка центрів основ перших 12 і других 13 датчиків блоків датчиків, які встановлені на рухомому вузлі суперпрецизійної аеростатичної напрямної, виконують в наступній послідовності. 1. Рухомий вузол встановлюють у вихідне для переміщення положення. 1 2 3 2. Подачею сигналів управління U упр(0), U упр(0), U упр(0) на аеростатичні регулятори 15, 16, 17 положення рухомого вузла рухомий вузол зміщують по висоті зазора і під другими датчиками ˆ ˆ ˆ 13 C1 , C 2 , C 3 , установлюють величини зазорів Z1 0 Z 2 0 Z3 0 , які дорівнюють 2 2 2 2 2 2 розрахунковій Zpoзp. величині зазору несучої плоскої опори, утвореною верхньою стінкою рухомого вузла і верхнею гранню основи 1 аеростатичної напрямної. Не змінюючи положення 35 40 рухомого вузла зміщують перші датчики 12 C1 , C 2 , C 3 , по висоті зазору і установлюють їх 1 1 1 відносно верхньої грані основи 1 з зазорами, які дорівнюють величинам зазорів під другими ˆ ˆ ˆ датчиками 13 Z10 Z 2 0 Z3 0 Zрозр 0 . Таким чином основи перших датчиків 12 і других 1 1 1 датчиків 13 величин зазорів усіх блоків датчиків з похибкою виготовлення розташованої під ними ділянки верхньої грані основи 1 напрямної будуть встановлені в одну площину. 3. Уведемо нерухому систему координат X3O3Z3 (Фіг. 6) наступним чином. Початок цієї системи координат сумістимо з центром основи другого датчика 13 C 3 третього блока 11 2 3 цього блока датчиків, а датчиків, ось Х3 проведемо через центр основи першого датчика 12 C 1 площину системи координат X3O3Z3 сумістимо з вертикальною площиною. Величини зазорів ˆ ˆ2 ˆ3 Z10 Z1 0 Z1 0 Zрозр 1 45 під першими датчиками 12 у вихідному для переміщення ˆ ˆ ˆ положенні рухомого вузла 3 приймають як опорні Z1 0 Z 2 0 Z3 0 для установки 1on 1on 1on рухомого вузла 3 на першій великій дискреті стабілізації. Рухомий вузол з вихідного положення переміщують на величину великої дискрети стабілізації ℓ. Для точного встановлення рухомого вузла 3 на дискрети стабілізації і запобіганню накопичення похибки величини переміщення цього рухомого вузла величина його переміщення оцінюється лінійним дискретним фільтром 5 UA 99943 C2 5 10 15 Калмана (Сэйдж Э, Мэлс Дж. "Теория оценивания и ее применение в управлении и связи" М. Мир, 1984 г.). У задачі, що вирішується, рухомий вузол напрямної пересувається кроковим п'єзоелектричним двигуном зі сталим кроком мікропереміщення, який виконується за один і той же час. Для застосування фільтра Калмана треба вимірювати дві компоненти вектора динамічної системи: відстань переміщення і швидкість переміщення рухомого вузла 3 у даному випадку. Отже, перша компонента вектора стану динамічної системи не вимірюється. Уведемо масштаб часу такий, що кожний крок мікропереміщення рухомого вузла 3 виконується за одиницю часу. Це дозволяє трактувати вимірювання j-го кроку мікропереміщення рухомого вузла як вимірювання швидкості його переміщення або вимірювання компоненти x2(j) вектора стану динамічної системи з дисперсією шуму VV2(j), яка дорівнює дисперсії шуму вимірювача кроку "m" мікропереміщення рухомого вузла. У даному випадку компонента х1(j) формується наступним чином ˆ (4) x1j x1j 1 mj , де x1j 1 - оцінка величини переміщення рухомого вузла за (j-1) кроків мікропереміщень. ˆ Прийнятому способу формування компоненти х1(j) на j-му кроці фільтрації відповідає дисперсія VV(j), яка дорівнює апостеріорній дисперсії V j помилки оцінки компоненти x1 X1 вектора стану за (j-ℓ) кроків мікропереміщень рухомого вузла 3 і дисперсії VV2(j) погрішності вимірювання j-го кроку мікропереміщення (дисперсії помилки вимірювання компоненти x2(j) вектора стану VV j VX j 1 VV j . (5) 1 2 1 Матриця дисперсії шуму вимірювання має вигляд: VV j 20 VX j 1 VV2 j 1 0 0 VV2 j . (6) Як відомо, дисперсію Vw вхідного шуму отримують або з аналізу фізичної суті задачі, що вирішується, або шляхом безпосереднього вимірювання з розумною точністю. Тому дисперсія Vw вхідного шуму пристрою переміщення рухомого вузла 3 напрямної може бути прийнятою рівною Vw 4VV , тобто в чотири рази більше шуму вимірювача. Матриця дисперсії вхідного шуму має вигляд: Vw 0 0 VW Дисперсія шуму вимірювача обчислюється по формулі 1 2 ˆ VV mn , N 1 ˆ де: m - асимптотично незміщена кроку мікропереміщення рухомого вузла 3; - середнє значення величини кроку мікропереміщення по N вимірювань. В варіанті фільтрації, що розглядається, t=1. Матриця Ф(j+1, j) приймає вигляд 1 1 . Фj 1 j , 0 1 Фільтрація здійснюється в такій послідовності: 1. Задаються початкові умови. 2. Обчислюється апріорна дисперсія V j 1 j . , VW j 25 2 30 (7) (8) X1 3. Обчислюється коефіцієнт підсилення фільтра K j . ˆ 4. Обчислюється оцінка вектора стану Xj . 35 40 5. Обчислюється апостеріорна дисперсія V j . X1 ˆ Оцінка вектора стану Xj включає оцінку величини переміщення рухомого елемента 3 за j кроків мікропереміщень, а також оцінку j-го кроку його мікропереміщення. На першому кроці фільтрації як апріорна дисперсія приймається сума дисперсій вхідного шуму і шуму вимірювача V 0,1 VW VV . 2 6 UA 99943 C2 На першій дискреті переміщення на регулятор 17 положення рухомого елемента 3 подають сигнал управління U3 1 і під другим датчиком 13 третього блока датчиків 11 установлюють упр величину зазора, яка дорівнює опорному ˆ ˆ3 (9) Z3 1 Z1on 0 2 На цій же першій дискреті стабілізації під другим датчиком 13 першого блока 9 датчиків 5 сигналом управління U1 1 установлюють величину зазору, яка дорівнює опорному упр ˆ ˆ Z1 1 Z1on 0 . 2 1 10 (10) ˆ ˆ ˆ ˆ Вимірюються, оцінюються і порівнюються величини зазорів Z1 1 і Z3 1 . Якщо Z1 1 Z 3 1 2 2 2 2 центри основ датчиків величин зазорів першого блока 9 датчиків в похідному для переміщення положенні були встановлені на пряму, яка не паралельна прямій, на яку в похідному положенні були встановлені центри основ датчиків третього блока 11 датчиків. Обчислюється різниця величин зазорів ˆ ˆ (11) Z1 q Z3 q Z1 q , 2 2 2 де q - номер дискрети переміщення. Рухомий вузол 3 встановлюють в похідне для переміщення положення. Варіюють висоту установлення першого датчика 12 C1 першого блока 9 датчиків з дискретою, яка не перевищує 1 15 ˆ похибки асимптотично незміщеної оцінки вимірювання величини зазору Z10 . На кожному кроці 1 варіації рухомий вузол 3 переміщують на велику дискрету стабілізації ℓ. Варійована величина 20 ˆ ˆ (12) Z3 i q Z3 q Z3 i q . 2 2 2 Рухомий вузол 3 встановлюють в похідне положення. Під першим датчиком 12 першого ˆ блока 9 датчиків встановлюють величину зазору Z1i 0 , на якому на i-му кроці варіації був ˆ зазору Z1i 0 приймається як величина опорного зазору. Під першим датчиком 12 першого 1 блока 9 датчиків як опорні встановлюється варійована величина зазору. На кожному кроці варіації обчислюється різниця 1 досягнутий min різниці (12), і переміщують його на дискрету стабілізації ℓ. Подачею сигналів управління під другими датчиками 13 третього блока 11 датчиків встановлюють величину ˆ ˆ зазору Z3 1 Z3 0 під другим датчиком 13 першого блока 9 датчиків встановлюють 2 1on ˆ ˆ величину зазору Z1 1 Z10 під другим датчиком 13 другого блока 10 датчиків встановлюють 25 величину зазору 2 1 ˆ ˆ2 (13) Z 2 1 Z1on 0 . 2 Вимірюється і оцінюється величина зазору під другим датчиком 13 першого блока 9 датчиків 9 і обчислюється різниця величин зазорів ˆ ˆ (14) Z3 i q Z3 q Z3 i q . 2 30 2 2 Якщо Z3i q 0 , рухомий вузол 3 встановлюють в вихідне для переміщення положення. 2 Варіюють висоту зазору під першим датчиком 12 другого блока 10 датчиків. На кожному i-му кроці варіації рухомий вузол 3 зміщують на велику дискрету стабілізації ℓ. На кожному кроці варіації виконуються наведені вище вимірювання і установки. Під датчиком 12 другого блока датчиків C 2 в похідному для переміщенні положенні рухомого вузла 3 встановлюють величину 1 35 40 зазору Z 2i q , який відповідає min різниці (15). 2 Рухомий вузол з похідного положення послідовно переміщують на q=2, q=3, … дискрети переміщення. На кожній дискреті переміщення варіюють висоту встановлення перших 12 і других 13 датчиків першого 9 і другого 10 блоків датчиків. Методом послідовних наближень досягають рівності нулю різностей (12) і (14), що свідчить про те, що центри основ датчиків в процесі стабілізації положення рухомого вузла 3 будуть переміщуватися по паралельних прямих, а на дискретах стабілізації положення рухомого вузла 3 буде зберігатися незмінним відносно площини стабілізації Q, яка паралельна цим прямим. 7 UA 99943 C2 В похідному для переміщення положенні рухомого вузла 3 під першими датчиками 12 C1 і 1 5 10 2 C1 першого 9 і другого 10 блоків датчиків установлюють величини зазорів, які забезпечують рівність нулю різностей (12) і (14). В процесі стабілізації положення рухомого вузла 3 робоча величина зазору Zpoб несучої аеростатичної опори не повинна суттєво змінюватися, так як у цьому випадку основний ресурс аеростатичних регуляторів тиску буде витрачатися на переборення тиску газового шару несучої аеростатичної опори. Для цього достатньо, щоб пряма, яка згладжує верхню грань основи 1 напрямної по сліду переміщення центрів основ датчиків третього блока 11 датчиків була паралельна прямій, по якій в процесі стабілізації пересуваються центри основ цих датчиків. Для побудови згладжуючої прямої рухомий елемент 3 встановлюють в похідне для ˆ ˆ переміщення положення. Під датчиками 12 і 13 величин зазорів блоків датчиків Z10 , Z1 0 , 1 15 2 ˆ2 ˆ ˆ3 ˆ Z1 0 , Z 2 0 , Z1 0 , Z 3 0 , які були визначені вище і які забезпечують переміщення центрів 2 2 основ датчиків по паралельних прямих, паралельних площині стабілізації. Рухомий вузол переміщують на першу велику дискрету стабілізації ℓ. Під другими датчиками величин зазорів опорні величини зазорів ˆ ˆ ˆ ˆ ˆ ˆ Z1 1 Z1 0 ; Z 2 1 Z 2 0 ; Z3 1 Z3 0 . 2 1on 2 1on 2 1on Рухомий елемент встановлюють у незміщене положення відносно площини стабілізації Q. 20 ˆ ˆ ˆ Вимірюються і оцінюються величини опорних зазорів Z1 0 ; Z 2 0 ; Z 3 0 для установки 1on 1on 1on рухомого вузла 3 у незміщене положення на другій дискреті стабілізації. Під другими датчиками 13 блоків датчиків встановлюють величини опорних зазорів: ˆ ˆ ˆ ˆ2 ˆ ˆ3 (15) Z1 2 Z1on 0 ; Z 2 2 Z1on 0 ; Z3 2 Z1on 0 . 2 1 2 2 Зберігаючи незмінним положення рухомого вузла 3 вимірюють і запам'ятовують як опорні ˆ ˆ ˆ величини зазорів Z1 2 ; Z 2 2 ; Z 3 2 під першими датчиками 12 для установки рухомого 1on 25 1on 1on вузла 3 у незміщене положення на третій дискреті переміщення. Рухомий вузол 3 встановлюють на третю дискрету переміщення і під другими датчиками 13 блоків датчиків установлюють величини опорних зазорів в тій же послідовності: ˆ ˆ ˆ ˆ2 ˆ ˆ3 (16) Z1 3 Z1on 0 ; Z 2 3 Z1on 0 ; Z3 3 Z1on 0 . 2 1 2 2 Ці установки і вимірювання виконуються на J дискретах до переміщення рухомого вузла 3 на відстань L. В результаті в системі координат X3O3Y3 маємо численність величин опорних ˆ ˆ ˆ ˆ зазорів Z 3 0 , Z3 1 , Z1 2 ,…, Z3 J від центра основи першого датчика 12 величини 1on 3 до точок b3f3d3… (Фіг. 5) поверхні основи напрямної по зазора третього блока 11 датчиків C 1 1on 30 1on 1on сліду переміщення центрів основ першого датчика 12 і другого датчика 13 третього блока 11 датчиків. Точки b3f3d3… поверхні основи 1 напрямної згладжуються в системі координат X3O3Y3 прямою по методу найменших квадратів. Згідно з методом найменших квадратів J 2 Z1on j k 3 * x 3 j b 3 min , 1 (17) j 1 35 де х3(j)=jl. Систему рівнянь для розрахунку коефіцієнтів k3 і b3 рівняння згладжуючої прямої отримаємо, якщо похідні від (17) по k3 і b3 прирівняємо до нуля: J 3 2 Z1on j k 3 * x 3 j b 3 * x 3 j min , j 1 (18) J 3 2 Z1on j k 3 * x 3 j b 3 * 1 min . (19) j 1 З (18) і (19) і ураховуючи що 2≠0: Z 3 1 * x 1 k * x 2 1 b * x 1 Z 3 2 * x 2 k * x 2 2 b * x 2 ... 1on 3 3 3 3 1on 3 3 3 3 3 3 ; Z 3 J * x J k * x 2 J b * x J 0 1on 3 3 3 3 3 8 (20) UA 99943 C2 3 3 3 Z1on 1 k 3 * x 3 1 b 3 Z1on 2 k 3 * x 3 2 b 3 ... Z1on J k 3 * x 3 J b 3 0 . Після перетворення система (20) приймає вигляд: 2 2 x 3 1 x 3 2 ... x 3 J * b 3 x 3 1 x 3 2 ... x 3 J * k 3 2 ; 3 3 3 Z1on 1 * x 3 1 Z1on 2 * x 3 2 ... Z1on J * x 3 J 3 3 J * b 3 x 3 1 x 3 2 ... x 3 J * k 3 Z1on 1 Z1on 2 ... Z1on J . 3 5 10 15 20 25 30 35 Рівняння згладжуючої прямої має вигляд у3=k3*х+b3. З (21) визначаються значення k3 і b3. Якщо k3≠0, центри основ датчиків 12 і 13 третього блока датчиків C 3 i C 3 переміщаються по прямій, яка не паралельна прямій, що згладжує 1 2 верхню грань основи 1 напрямної по сліду датчиків третього блока 11 датчиків. Рухомий вузол 3 повертають в похідне для переміщення положення. В залежності від кута нахилу згладжуючої прямої (від кутового коефіцієнта k3) величина зазору під першими датчиками 12 блоків датчиків 2 3 C1 , C1 , C1 , варіюється шляхом підвищення або зменшення на однакову величину. Методом 1 послідовних наближень досягають виконання рівності нулю кутового коефіцієнта k3. В результаті в процесі стабілізації положення рухомого вузла 3 зазор несучої аеростатичної опори буде залишатися практично незмінним, так як величина опорних зазорів відрізняється на малу величину. 3. Установка основ перших датчиків 12, других датчиків 13 і третіх датчиків 14 блоків датчиків 9, 10, 11 в паралельні між собою площини. Установка під третіми датчиками 14 блоків 9, 10, 11 датчиків величин зазорів, які відповідають незміщеному положенню рухомого вузла відносно площини стабілізації. Отже, центри основ перших 12 і других 13 датчиків кожного блока датчиків 9, 10, 11 переміщуються по паралельних прямих, що забезпечує незмінним положення рухомого вузла 3 відносно площини стабілізації на великих дискретах стабілізації ℓ. При великій неплоскістності верхньої грані основи 1 напрямної похибка положення рухомого вузла (Фіг. 7) на дискреті стабілізації може перевищувати припустиму. Точність стабілізації рухомого вузла 3 може бути підвищена також шляхом зменшення дискрети стабілізації, так як при цьому зменшується вплив похибки обробки верхньої грані основи 1 напрямної. Для цього основи перших датчиків 12, других датчиків 13 і третіх датчиків 14 кожного блока датчиків встановити в паралельні між собою площини, а величини зазорів під третіми датчиками 14 в похідному для переміщенню положенню рухомого вузла 3 повинні дорівнювати його незміщеному положенню відносно площини стабілізації. Для виконання цих установок рухомий вузол 3 з похідного положення зміщується на малу дискрету стабілізації ℓ1=ℓ/2. Під другими датчиками 13 величин зазорів установлюють величини зазорів, які дорівнюють величинам зазорів під третіми датчиками 14 величин зазорів при незміщеному положенні рухому вузла 3 в похідному для переміщення положенні. Величини зазорів Z1 1 , Z 2 1 , Z3 1 під першими датчиками 12 приймаються як опорні зазорів. 1 1 1 Так як треті датчики 14 жорстко зв'язані зі своїми блоками датчиків, вони переміщуються по прямих, які паралельні прямим, по яких переміщуються центри основ перших і других датчиків відповідних блоків датчиків: 2 2 3 k1 k1 k1 k 3 k1 k 3 1 3; 3, ; 40 (21) (22) де k 1 , k 1 , k 2 , k 2 , k 3 , k 3 - кутові коефіцієнти рівнянь прямих, згладжуючих поверхню 3 1 2 1 3 1 основи 1 напрямної по сліду переміщення перших і третіх датчиків 12 і 14. Для того, щоб використовувати величини зазорів під третіми датчиками 14 C1 , C 2 , C 3 , 3 3 3 блоків датчиків 9, 10, 11 як опорні зазори, необхідно щоб виконувалися рівності: 45 2 2 3 b1 b1 ; b1 b 3 ; b1 b 3 … 1 3 3 При виконанні цих умов площини установки центрів основ датчиків кожного блока датчиків паралельні між собою. 9 UA 99943 C2 5 Для установки третіх датчиків 14 C1 , C 2 , C 3 , блоків датчиків у паралельні між собою 3 3 3 площини попередньо отримують рівняння згладжуючих верхню грань основи 1 суперпрецизійної аеростатичної напрямної по слідах переміщення перших 12 і других 13 блоків датчиків у відповідності з (17÷22). Рівняння згладжуючих прямих отримують по вимірюваннях опорних зазорів під першими датчиками 12 C1 , C 2 , C 3 , блоків 9, 10, 11 датчиків, а стабілізація рухомого вузла 3 1 1 1 здійснюється з великою дискретою стабілізації ℓ по вимірюваннях величин зазорів під першими 12 і другими 13 датчиками блоків датчиків: 2 3 3 3 1 1 1 2 2 (23) y1 k1 x b1 ; y1 k1 x b1 ; y1 k1 x b1 . В похідному для переміщення положенні рухомого вузла вимірюють, оцінюють і 10 15 ˆ ˆ ˆ запам'ятовують величини зазорів Z1 1 , Z 2 1 , Z3 1 , під третіми датчиками 14 величин 3 3 3 зазорів блоків датчиків (при незміщеному положенні рухомого вузла 3 відносно площини стабілізації). Рухомий елемент з похідного положення переміщують на малу дискрету стабілізації ℓ1. Під другими датчиками 13 C1 , C 2 , C 3 , блоків 9, 10, 11 датчиків встановлюють 2 2 2 величини зазорів, які дорівнюють величинам зазорів під третіми 14 датчиками блоків датчиків при незміщеному положенні рухомого вузла 3 в похідному положенні: ˆ ˆ ˆ ˆ2 ˆ ˆ (24) Z1 1 Z1 1 ; Z2 1 Z3 1 ; Z3 1 Z3 1 . 2 3 2 2 3 Вимірюються, оцінюються і приймаються як опорні величини зазорів під третіми датчиками ˆ ˆ ˆ 14 блоків датчиків Z1 1 ; Z 2 1 ; Z 3 1 . Рухомий вузол 3 переміщують на 3on 3on 3on величину великої дискрети стабілізації ℓ і встановлюють на відстані (ℓ+ℓ1). Під другими датчиками 13 блоків датчиків встановлюють величини зазорів, які дорівнюють опорним: 20 25 ˆ ˆ ˆ ˆ2 ˆ ˆ Z1 1 Z1on 1 ; Z 2 1 Z3on 1 ; Z3 1 Z3on 1 . 2 3 2 2 3 Вимірюються, оцінюються і приймаються як опорні величини зазорів (25) ˆ Z1on 2 1 ; 3 ˆ2 ˆ Z3on 2 1 ; Z3on 2 1 під третіми датчиками 14 блоків датчиків. Рухомийвузол 3 3 переміщують на велику дискрету стабілізації ℓ. В результаті він буде встановлений на відстані (ℓ+ℓ1) в незміщене положення відносно похідного. Наведені вище вимірювання і установки на дискреті переміщення (ℓ+ℓ1) виконують до переміщення рухомого вузла 3 відносно похідного на відстань (L+ℓ1). В результаті отримують три масиви величин зазорів під третіми датчиками 14 2 C1 , C 3 , C 3 , блоків датчиків: 3 3 ˆ ˆ ˆ 1 ; Z1 ; Z1 2 ; Z1 3 ; Z3 1 ˆ 3 1 1 1 3 3 ˆ ˆ ˆ ˆ 2 ; Z 2 ; Z 2 2 ; Z 2 3 ; Z 1 1 1 1 ˆ Z1 J 1 3 ˆ2 Z3 J 1 3 3 3 3 ˆ ˆ ˆ ˆ ˆ Z3 1 ; Z3 1 ; Z3 2 1 ; Z3 3 1 ; Z3 J 1 3 3 3 3 3 (26) Записують три системи рівнянь для отримання рівнянь прямих, які згладжують верхню грань основи 1 аеростатичної напрямної по сліду переміщення третіх датчиків 14 величин зазорів блоків датчиків: 2 2 2 x 31 1 x 31 1 ... x 31 J 1 * b 31 x 31 1 x 31 1 ... x 31 J 1 * k 31 ˆ 1 1 1 Z 3 1 * x 31 1 Z 3 1 * x 31 1 ... Z 3 J 1 * x 31 J 1 ˆ ˆ ; (27) 1 ˆ 1 ˆ 1 J * b 31 x 31 1 x 31 1 ... x 31 J 1 * k 31 Z 3 1 Z 3 1 ... Z 3 J 1 . ˆ 30 2 2 2 x321 x32 1 ... x32J 1 * b32 x321 x32 1 ... x32J 1 * k32 ˆ 2 2 2 Z3 1 * x321 Z3 1 * x32 1 ... Z3 J 1 * x32J 1 ˆ ˆ 2 ˆ 2 ˆ 2 J * b 32 x 32 1 x 32 1 ... x 32 J 1 * k 32 Z 3 1 Z 3 1 ... Z 3 J 1 . ˆ 10 ; (28) UA 99943 C2 2 2 2 x331 x33 1 ... x33J 1 * b33 x331 x33 1 ... x33J 1 * k33 ˆ 3 3 3 Z3 1 * x33 1 Z3 1 * x33 1 ... Z3 J 1 *33 J 1 ˆ ˆ ; (29) 3 ˆ 3 ˆ 3 J * b 33 x 33 1 x 33 1 ... x 33 J 1 * k 33 Z 3 1 Z 3 1 ... Z 3 J 1 . ˆ З (27), (28), (29) отримують рівняння згладжуючих прямих по сліду переміщення третіх датчиків 14 величин зазорів блоків 9, 10, 11 датчиків: 1 1 1 2 2 2 3 3 3 (30) y 3 k 3 x b 3 ; y3 k3 x b3 ; y3 k3 x b3 . Рухомий вузол переміщують в похідне положення і встановлюють в незміщене положення відносно площини стабілізації. По рівності кутових коефіцієнтів в рівняннях прямих (23) і (30): 5 10 1 1 2 2 3 3 (31) k 1 k 3 ; k1 k 3 ; k1 k 3 перевіряють паралельність прямих, по яких переміщуються треті датчики; прямих, по яких переміщуються перші датчики 12 і другі датчики 13 кожного блока датчиків. Якщо, окрім того, виконуються рівності 1 1 2 2 3 3 (32) b1 b 3 ; b1 b 3 ; b1 b 3 в похідному для переміщення положенні рухомого вузла 3, величини зазорів під третіми датчиками 14 блоків датчиків відповідають незміщеному положенню рухомого вузла і можуть використовуватися як опорні. У іншому разі варіюють величини зазорів під третіми датчиками 14 величин зазорів і методом послідовних наближень досягають виконання рівностей (31) і (32). В похідному для переміщення положенні рухомого вузла 3 вимірюють, оцінюють і запам'ятовують як опорні величини зазорів ˆ ˆ ˆ ˆ ˆ ˆ Z1 , Z1 , Z 2 , Z 2 , Z 3 , Z 3 . 3on 1 3on 3on 1 3on 1 3on 3on 15 4. Стабілізація положення рухомого вузла 3 суперпрецизійної аеростатичної напрямної здійснюється в такій послідовності З похідного положення рухомий вузол 3 переміщують на першу малу дискрету стабілізації ℓ1. Під другими датчиками 13 величин зазорів блоків датчиків 9, 10, 11 встановлюють величини зазорів, які дорівнюють величинам опорних зазорів на першій малій дискреті стабілізації ℓ1: ˆ ˆ ˆ ˆ ˆ ˆ (33) Z1 Z1 ; Z 2 Z 2 ; Z 3 Z 3 . 20 Рухомий вузол 3 встановлюють на другу малу (першу велику) дискрету стабілізації. Під другими датчиками 13 величин зазорів блоків датчиків встановлюють величини зазорів, які дорівнюють опорним: ˆ ˆ ˆ ˆ ˆ ˆ (34) Z1 Z1 ; Z 2 Z 2 ; Z 3 Z 3 . 2 1 3on 2 25 1 1on 2 1 2 3on 1on 1 2 2 1 3on 1on 1 1 Рухомий вузол 3 на другій малій (першій великій) дискреті стабілізації буде встановлений у незміщене положення відносно площини стабілізації. Вимірюють, оцінюють і приймають як опорні величини зазорів ˆ ˆ ˆ ˆ ˆ ˆ Z1 3 , Z1 2 , Z 23 , Z 2 2 , Z 3 3 , Z 3 2 . 1 3on 1on 1 3on 1on 1 3on 1on Рухомий вузол 3 переміщують на третю малу дискрету стабілізації на відстань 3ℓ1. Під другими датчиками 13 блоків датчиків встановлюють величини зазорів, які дорівнюють величинам опорних зазорів на третій малій дискреті стабілізації: ˆ ˆ ˆ ˆ ˆ ˆ (35) Z1 3 Z1 3 ; Z 2 3 Z 2 3 ; Z 3 3 Z 3 3 . 2 30 2 35 1 3on 1 2 1 3on 1 2 1 3on 1 На третій малій дискреті стабілізації рухомий вузол 3 буде встановлений у незміщене положення. Рухомий вузол 3 переміщують на четверту малу (другу велику) дискрету стабілізації. Під другими датчиками 13 величин зазорів встановлюють величини опорних зазорів: ˆ ˆ ˆ ˆ ˆ ˆ (36) Z1 2 Z1 2 ; Z 2 2 Z 2 2 ; Z 3 2 Z 3 2 . 1on 2 1on 2 1on На другій великій дискреті стабілізації рухомий вузол 3 буде встановлений у незміщене положення відносно площини стабілізації Q. Описаний вище процес вимірювання величин опорних зазорів і установок рухомого вузла 3 у незміщене положення продовжують до його переміщення на задану відстань L. В результаті отримують три масиви величин опорних зазорів (зазорів стабілізації): 11 UA 99943 C2 ˆ ˆ Z1 on 1 ; Z1on ; 3 1 ˆ 2 ; Z 2 ; ˆ Z ˆ ˆ Z1on 31 ; Z1on 2 ; 1 3 ˆ 2 3 ; Z 2 2 ; ˆ Z ˆ ˆ Z1on 51 ; Z1on 3 ; … 1 3 ˆ 2 5 ; Z 2 3 ; … ˆ Z 1 1 1on 1on 3on 1 1on 3on 3on 3 ; Z 3 ; Z 3 3 ; Z 3 2 ; Z 3 5 ; Z 3 3 ; … ˆ ˆ ˆ ˆ ˆ Z 3on 1 ˆ 1on 1 1 3on 3on 1on 1on 5 10 15 20 Для стабілізації положення рухомого вузла 3 суперпрецизійної аеростатичної напрямної в процесі робочого переміщення рухомий вузол 3 у похідному для переміщення положенні встановлюють у незміщене положення відносно площини стабілізації. При досягненні рухомим вузлом 3 наступної дискрети стабілізації під другими датчиками 13 величин зазорів кожного блока 9, 10, 11 датчиків установлюють величини опорних зазорів для даної дискрети стабілізації і установлюють рухомий вузол 3 на поточній дискреті стабілізації у незміщене положення відносно площини стабілізації Q. Відхилення рухомого вузла 3 (похибка стабілізації) не перевищує максимальної різниці між двома суміжними опорними зазорами (Фіг. 7). Пристрій стабілізації положення рухомого вузла аеростатичної напрямної працює таким чином. Рухомий вузол 3 встановлюють у похідне для переміщення положення. Перемикачі "більшевимк.-менше" встановлюють у положення "вимк.". Виходи операційних підсилювачів 30 відключають від входів диференційних підсилювачів 32. Перемикач 33 "робота-вимк." встановлюють у положення "робота". Виходи величин поточних зазорів цифрового блока 29 підключають до других входів диференційних підсилювачів 32, а виходи напруг опорних зазорів цифрового блока 29 до перших входів диференційних підсилювачів 32. У цифровий 29 блок уводять величину переміщення L переміщення рухомого елемента. В пристрої 6 управління переміщенням установлюють величину кроку "m" мікропереміщення рухомого вузла 3. Виконується пуск підпрограми Стабілізація. У відповідності з алгоритмом роботи підпрограми ˆ ˆ ˆ коди величин опорних зазорів Z1 0 , Z 2 0 , Z 3 0 зчитуються з масиву опорних зазорів, 2on 25 30 35 40 45 (37) 2on 2on перетворюються в напруги опорних зазорів і через перемикачі 33 надходять на перші входи відповідних диференційних підсилювачів 32. На другі входи диференційних підсилювачів 32 (через цифровий блок) надходять вихідні напруги вимірювачів 28 величин зазорів під другими датчиками 13 величин зазорів блоків датчиків. Якщо зазори під другими датчиками 13 величин зазорів не рівні відповідним опорним зазорам, на виходах операційних підсилювачів 32 виникають різниці потенціалів, знаки і величини яких визначаються напрямком і величиною відхилень зазорів під другими датчиками 13 від відповідних опорних зазорів. В результаті регулятори 15, 16, 17 положення рухомого вузла 3 у похідному для переміщення положенні встановлять рухомий вузол 3 у незміщене положення відносно площини стабілізації. Пристрій 6 управління переміщенням рухомого вузла 3 переводять у режим безперервного крокового переміщення з встановленим кроком мікропереміщення "m". На кожному f-му кроці мікропереміщення з пристрою 6 управління переміщенням у цифровий блок 29 надходять сигнали Un і Uк f-го кроку мікропереміщення і вихідна напруга вимірювача величини зазору під датчиком величини зазору п'єзоелектричного двигуна. У відповідності з алгоритмом підпрограми Стабілізація на кожному f-му кроці мікропереміщення обчислюється величина f-го кроку мікропереміщення m(f)=Zk(f)-Zn(f). Величина результуючого переміщення за f кроків оцінюється дискретним лінійним фільтром Калмана. Обчислюється різниця між відстанню до дискрети стабілізації ℓ 1 і поточним значенням величини переміщення ˆ 1 x1f . Якщо ℓ≥m, рухомий вузол переміщується на наступний крок "m" мікропереміщення. Якщо на f-му кроці мікропереміщення 0≤ℓ≤m, номер дискрети стабілізації збільшується на одиницю (дискрети стабілізації нумеруються по числу малих дискрет стабілізації). По номеру дискрети стабілізації з масиву опорних зазорів зчитують коди величин опорних зазорів, перетворюють в напруги, які надходять на перші входи диференційних підсилювачів 32. В результаті під другими датчиками 13 величин зазорів блоків датчиків 9, 10, 11 будуть утримуватися величини зазорів, які дорівнюють величинам опорних зазорів на поточній дискреті стабілізації. Стабілізація рухомого вузла 3 продовжується до його переміщення на задану відстань L. 50 12 UA 99943 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 Спосіб стабілізації положення рухомого вузла суперпрецизійної аеростатичної напрямної, який включає формування величин опорних зазорів під датчиками величин зазорів, які на дискретах стабілізації положення рухомого вузла відповідають його незміщеному положенню відносно площини стабілізації, коректування положення рухомого вузла на дискретах стабілізації в процесі його робочого переміщення, який відрізняється тим, що в рухомому вузлі суперпрецизійної аеростатичної напрямної закріплюють не менше трьох блоків датчиків величин зазорів, кожний з яких включає не менше трьох датчиків величини зазору, розташованих по вершинах рівних рівнобічних трикутників на мінімальних між собою відстанях, при цьому сторона рівнобічного трикутника дорівнює великій дискреті стабілізації положення рухомого вузла, а мала дискрета стабілізації дорівнює половині сторони рівнобічного трикутника, по рівняннях прямих, згладжуючих верхню грань основи суперпрецизійної лінійної напрямної по сліду переміщення перших і других датчиків величин зазорів блоків датчиків, а також по рівняннях прямих, які згладжують цю поверхню по сліду переміщення третіх датчиків величин зазорів блоків датчиків, центри основ перших і других датчиків кожного блока датчиків встановлюють на паралельні між собою прямі, а центри основ третіх датчиків встановлюють на прямі, які паралельні прямим, на яких встановлені центри основ перших і других датчиків, в вихідному для переміщення положенні рухомого вузла вимірюють і оцінюють величини зазорів під другими датчиками блоків датчиків, а по оцінках цих величин зазорів рухомий вузол встановлюють у незміщене положення відносно площини стабілізації, в вихідному для переміщення і незміщеному положенні рухомого вузла відносно площини стабілізації вимірюють, оцінюють і встановлюють величини зазорів під третіми датчиками величин зазорів, які дорівнюють величинам опорних зазорів на першій малій дискреті стабілізації положення рухомого вузла відносно площини стабілізації, а також вимірюють, оцінюють і приймають як опорні величини зазорів під першими датчиками величин зазорів блоків датчиків на першій великій дискреті стабілізації, по оцінках величини переміщення рухомого вузла лінійним дискретним фільтром Калмана його послідовно переміщують на малі дискрети стабілізації, на кожній малій дискреті стабілізації під другими датчиками величин зазорів встановлюють величини зазорів, які, в залежності від номера дискрети стабілізації, дорівнюють величинам відповідних опорних зазорів під першими або третіми датчиками величин зазорів, виміряних на попередній дискреті стабілізації і встановлюють рухомий вузол на поточній дискреті стабілізації у незміщене положення відносно площини стабілізації, отримують величини опорних зазорів, по яких коректують положення рухомого вузла на кожній малій дискреті стабілізації в процесі його робочого переміщення. 13 UA 99943 C2 14 UA 99943 C2 15 UA 99943 C2 16 UA 99943 C2 Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 17
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for stabilization of position of movable unit of superposition aerostatic guide
Автори англійськоюTarasov Viktor Oleksiiovych, Levin Ihor Oleksiiovych
Назва патенту російськоюСпособ стабилизации положения подвижного узла суперпрецизионной аэростатической направляющей
Автори російськоюТарасов Виктор Алексеевич, Левин Игорь Алексеевич
МПК / Мітки
МПК: F16C 32/06
Мітки: спосіб, аеростатичної, положення, стабілізації, суперпрецизійної, напрямної, рухомого, вузла
Код посилання
<a href="https://ua.patents.su/19-99943-sposib-stabilizaci-polozhennya-rukhomogo-vuzla-superprecizijjno-aerostatichno-napryamno.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації положення рухомого вузла суперпрецизійної аеростатичної напрямної</a>
Спосіб стабілізації положення рухомого вузла суперпрецизійної аеростатичної напрямної

Номер патенту: 59882
Опубліковано: 10.06.2011
Автори: Левін Ігор Олексійович, Тарасов Віктор Олексійович
МПК: F16C 32/06
Мітки: суперпрецизійної, вузла, аеростатичної, рухомого, спосіб, напрямної, положення, стабілізації
Формула / Реферат:
Спосіб стабілізації положення рухомого вузла суперпрецизійної аеростатичної напрямної, який включає формування величин опорних зазорів під датчиками величин зазорів, які на дискретах стабілізації положення рухомого вузла відповідають його незміщеному положенню відносно площини стабілізації, коректування положення рухомого вузла на дискретах стабілізації в процесі його робочого переміщення, який відрізняється тим, що в рухомому вузлі...
Спосіб стабілізації положення рухомого елемента аеростатичної напрямної та пристрій для його здійснення
Номер патенту: 14905
Опубліковано: 04.03.1997
Автори: Шепелев Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: елемента, положення, пристрій, стабілізації, аеростатичної, рухомого, напрямної, спосіб, здійснення
Формула / Реферат:
1. Способ стабилизации положения подвижного элемента аэростатической, направляющей, включающий регулирование величин зазоров между основанием подвижного элемента и поверхностью неподвижного элемента, отличающийся тем, что в подвижном элементе аэростатической направляющей, установленном в начальном положении, закрепляют не менее трех блоков датчиков величин зазоров, включающих каждый по два датчика величины зазора, расположенных на одинаковом...
Спосіб стабілізації положення рухомого елемента плоскої пружної опори та пристрій для його реалізації

Номер патенту: 41506
Опубліковано: 17.09.2001
Автори: Зіненко Володимир Миколайович, Шепелєв Анатолій Олександрович
МПК: F16C 32/06
Мітки: спосіб, пружної, рухомого, плоскої, положення, стабілізації, пристрій, елемента, реалізації, опори
Формула / Реферат:
1. Спосіб стабілізації положення рухомого елемента плоскої пружної опори, який включає регулювання величин зазорів між основами плоскої пружної опори і поверхнею рухомого елемента, який відрізняється тим, що в основі плоскої пружної опори встановлюють обмежену множину Q датчиків величин зазорів, основи яких розміщують у площині згаданої основи плоскої пружної опори, причому, датчики величин зазорів встановлюють по "n" лініям...
Пристрій для юстирування положення лінійної напрямної і різцевої головки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двокоординатного верстата
Номер патенту: 52410
Опубліковано: 16.12.2002
Автор: Зіненко Володимир Миколайович
МПК: B23B 41/00
Мітки: аеростатичної, верстата, опори, лінійної, юстирування, суперпрецизійного, обертання, двокоординатного, вала, головки, відносної, осі, положення, різцевої, пристрій, напрямної, шпиндельної
Формула / Реферат:
Пристрій для юстирування положення лінійної напрямної і різцевої головки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двокоординатного верстата, який містить регулювальні гвинти положення лінійної напрямної, регулювальні гвинти положення різцевої головки, який відрізняється тим, що він має пристрій позиціонування датчиків величин проміжків, який включає втулку, до якої прикріплені два кронштейни, на кінцях...
Пристрій стабілізації положення рухомого елемента плоскої аеростатичної опори
Номер патенту: 17152
Опубліковано: 18.03.1997
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: F16C 32/06
Мітки: положення, аеростатичної, опори, плоскої, елемента, рухомого, пристрій, стабілізації
Формула / Реферат:
Устройство стабилизации положения подвижного элемента плоской аэростатической опоры, включающей подвижный и неподвижный элементы плоской аэростатической опоры и регуляторы положения подвижного элемента плоской аэростатической опоры, отличающееся тем, что неподвижный элемент плоской аэростатической опоры состоит из двух оснований со встроенными в них жиклерами подачи газа в зазоре между этими основаниями и размещенным между ними подвиж-ным...
Попередній патент: Спосіб створення в’язкопружного покриття, яке знижує опір, для морських і промислових поверхонь
Наступний патент: Кришка консервної банки
Випадковий патент: Установка для піролізу твердих вуглеводневих матеріалів